modulmotor dc
TRANSCRIPT

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 1/11
Modul_5223-118-3
Motor Arus Searah
Setelah mempelajari modul ini, mahasiswa dapat :
Menjelaskan prinsip kerja motor arus searah
Menganalisis konstruksi dan diagram motor arus searah.
Membedakan jenis-jenis motor arus searah.
Menganalisis karakteristik motor arus searah.
Menghitung Efisiensi dan rugi-rugi motor arus searah
Mengoperasikan motor arus searah
I. MATERI1. Pendahuluan.
otor adalah mesin yang mengubah energi listrik menjadi energi
mekanis. Motor arus searah di sebut juga motor dc (direct current ).
Mesin arus searah pada dasarnya sama dengan mesin arus bolak balik,
perbedaannya pada mesin arus searah mempunyai suatu komutator.
Konstruksi motor dc sangat mirip dengan generator dc. Kenyataannya mesinarus searah dapat berfungsi sebagai motor maupun sebagai generator.
M
Prinsip dari motor dc adalah :
Apabila suatu penghantar yang membawa arus listrik di dalam suatu
medan magnet, maka akan timbul gaya mekanik yang mempunyai arah
sesuai dengan hukum tangan kiri dan besarnya adalah F = B I L
Newton.
Modul Ajar “Motor Arus Searah” 1

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 2/11
Ra
EaV Ia
−=
Ra IaV Ea .−=
Modul_5223-118-3
Konstruksi motor dc sama dengan generator dc, disini berlaku hubungan
hubungan :
perlawanan ggl dapat dinyatakan dengan persamaan :
(1)
dan arus jangkar dinyatakan :
(2)
2. Hubungan Antara Torsi dan gaya.Sebuah kumparan lilitan tunggal menghasilkan arus dalam medan
magnit, ditunjukkan dalam gambar 3a. Menurut persamaan (2) dan aturan
tangan kiri, gaya orthogonal F1 terjadi dalam kumparan sisi 1, dan juga gaya f 2
berada dalam kumparan sisi 2, lihat gambar 3b.
Gaya f 1 dan f 2 direncanakan untuk menghasilkan struktur rotasi jarum jam
yang membantu penghantar berputar pada pusat putaran.
Torsi didefinisikan penekanan kopling mekanik (gaya dan jarak
radialnya pada putaran poros) untuk menghasilkan putaran. Ini dinyatakan
dalam satuan gaya dan jarak, yaitu : lb.ft, g.cm, ounce-inches, dikenal dari
usaha, dinyatakan dalam ft.lb, cm.g.
Modul Ajar “Motor Arus Searah” 2
V
Ia+
_
Gambar 2. Rangkaian Motor DC
EaV
Ia
V
Ra
V

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 3/11
Modul_5223-118-3
Hubungan antara gaya pada sebuah konduktor dan hasil atau arah torsi
diperlihatkan pada gambar 3.
a. Arus dalam medan magnit pada kumparan tunggal
b. Gaya pada F1 dan F2.
Gambar 3. Torsi yang dihasilkan dalam lilitan
Bentuk gerakan torsi diatas ditunjukkan pada gambar 3b. yaitu hasil
penjumlahan dari f 1r dan f 2r, ini total penjumlahan gerakan torsi yang
dihasilkan oleh penghantar tunggal yang membentang untuk menghasilkan
Modul Ajar “Motor Arus Searah” 3

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 4/11
Modul_5223-118-3
rotasi. Dapat dituliskan bahwa pada gaya f 1 dan f 2 adalah sana besarnya
selama keduanya dalam medan gaya magnet yang sama dan membawa arus
yang sama. Hal ini untuk mengembangkan gaya-gaya beberapa konduktor
pembawa arus yang sama dalam medan magnit yang serupa, tetapi
pengembangan torsi adalah tidak sama untuk beberapa konduktor.Jangkar dan medan motor dua kutub ditunjukkan pada gambar 3.
penghantar pembawa arus dalam arah sama berkembang gaya yang sama.
Hal ini sama sebab keduanya membawa arus yang sama dan tegak lurus
dalam medan yang sama. Torsi didefinisikan sebagai hasil gaya dan jarak
garis tegak lurus dari poros, kita dapat melihat komponen yang digunakan
pada pengembangan gaya yaitu f, atau :
f = F sin θ Newton (3)
dimana F adalah pengembangan gaya pada penghantar dan kegunaan gaya
tangensial f untuk keliling jangkar.
Untuk pengembangan torsi oleh konduktor T, pada permukaan jangkar biasa
dituliskan dalam :
T = f r = (F Sin θ ) r Newton (4)
Gambar 4. Guna Torsi Bagi Putaran
Modul Ajar “Motor Arus Searah” 4

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 5/11
EaV Ra Ia −=.
( ) ( ) EaV Ia Ia Ra Ia −=.
Ia Ea IaV Ra I a ...2−=
watt Ra I IaV Ia Eaa...
2−=
C
Ra IaV n
.−=
Modul_5223-118-3
3. EMF Lawan dan Tenaga Mekanik Motor.Kedudukan tegangan jangkar berbanding terbalik dengan rangkaian
jangkar, EMF balik beban penuh akan berubah dari aproksimasi 80% untuk
motor kecil dan 95% untuk motor besar.
EMF balik (Ea) sama dengan sebuah persentasi dari tegangan jangkar (Va)
adalah perbandingan yang penting dalam menentukan efisiensi relatife dan
peningkatan tenaga mekanik melalui salah satu jangkar.
Tegangan jatuh berbanding terbalik dengan jangkar, drop sikat (BD)
diabaikan adalah :
(5)
dan tenaga hilang dalam jangkar bilamana Va berbanding terbalik dengan
tenaga hilang sebesar :
atau (6)
(7)
Pemecahan untuk Ea.Ia , kita dapatkan :
(8)
Maksudnya adalah ketika daya listrik (V.Ia) diberikan pada rangkaian jangkar
motor untuk menghasilkan putaran. Banyak dari power yang mengalami
disipasi dalam variasi komponen buatan tahanan jangkar, disipasi ini berupa
sebuah armature tembaga (Ia.Ra). Tenaga yang tersisa (Ea.Ia) adalah
digunakan oleh jangkar, Ea.Ia/V.Ia adalah sama dengan ratio Ea/V.
Dengan demikian semakin tinggi persentasi dari dari EMF balik ke tegangan
belitan jangkar, semakin tinggi efisiensi motornya.
Selanjutnya untuk suatu arus beban, untuk meningkatkan EMF balik
maksimum, hal ini hanya perlu menambah arus medan dan fluks menjadi
maksimum (tanpa overheating medan) dan kadang operasi motor
kecepatannya sangat tinggi.
Pada persamaan kecepatan,
(9)
Memperlihatkan bahwa ketika fluks medan dinaikkan, kecepatan turun.
Kemudian kecepatan dan ggl lawan adalah bagian yang ditentukan oleh
beban mekanik sebuah motor. Walaupun demikian beban mekanik dan garis
resultan dan arus jangkar, ada sebuah pengukur kecepatan dan pengaturan
rheostat medan yang akan menghasilkan tenaga maksimum.
Modul Ajar “Motor Arus Searah” 5

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 6/11
Modul_5223-118-3
4. Jenis-Jenis Motor Arus Searah. Motor arus searah atau motor dc mempunyai beberapa jenis
berdasarkan lilitan penguatnya, yaitu motor dc seri, motor dc shunt dan motor
dc kompon. Pada motor dc sudah tersedia medan penguat dari masing –
masing jenis motor tersebut, tergantung pada saat ingin mengoperasikan
dihubungkan dengan jenis motor dc jenis apa. Dibawah ini digambarkan
bermacam-macam bentuk diagram jenis-jenis motor dc dengan lilitan
penguatnya.
Gambar 5. Diagram Jenis-jenis motor DC
5.
Karakteristik Kopel Motor DC.
Modul Ajar “Motor Arus Searah” 6
VL
D1
D2
M
A1
A2
VL
E2E1
Diagram Motor Seri
M
Diagram Motor Shunt
A2
VL
Diagram Motor Kompon
M
A1
E2E1
D1
D2

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 7/11
Modul_5223-118-3
Untuk motor arus searah berlaku hubungan.
(10)
(11)
(12)
Dari persamaan terakhir di atas dapat dilihat, bahwa pada motor shunt
bertambahnya kopel (artinya arus jangkar bertambah besar) mengakibatkan
kecepatan (n) menurun.
Pada motor seri, bertambahnya kopel (arus) akan menyebabkan pula
bertambahnya harga fluks (φ ), karena fluks pada motor seri merupakan
fungsi arus jangkar (Ia). Dari rangkaian motor seri terlihat bahwa untuk harga
arus jangkar sama dengan nol, harga fluks juga nol, sehingga dari persamaanterakhir di atas diperoleh harga n menuju tak terhingga.
Sedangkan untuk harga Ia yang cukup besar, harga n pada persamaan di
atas akan mendekati nol.
Dengan demikian karakteristik kecepatan-kopel untuk motor seri dan shunt
masing-masing dapat digambarkan seperti pada gambar 6.
Gambar 6. Karakteristik Kecepatan Kopel motor shunt dan
seri.
Karakteristik kopel setiap jenis motor akan mengalami perubahan
dengan demikian dapat diasumsikan bahwa setiap motor diawali dengan
tepat dan dipercepat.
Jadi jangkar disambungkan langsung secara silang dengan terminal line (VL).
Modul Ajar “Motor Arus Searah” 7
T
n
shunt
seri
φ C
Ra IaVan
nC Ea
Ra Ia EaVa
.
.
−=
=
+=

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 8/11
Modul_5223-118-3
Pada kasus motor Shunt, selama start dijalankan, arus dalam rangkaian
medan shunt konstan dari pengaturan rheostat medan, dan sebagai
akibatnya timbul fluks yang pada pokoknya konstan. Beban mekanik
dikurangi, kecepatan motor turun pelan-pelan yang menyebabkan penurunan
tegangan balik dan kenaikan arus jangkar. Dalam persamaan dasar torsi, jikafluks konstan dan jika arus jangkar dinaikkan dengan langsung menggunakan
beban mekanik, persamaa torsi untuk motor shunt dapat diekpresikan dengan
hubungan linier sempurna , : T = K2Ia.
Pada kasus motor seri medan shunt dihilangkan dari jangkar dan digantikan
dengan belitan atau medan seri penuh, konstruksi dan jangkar akan
mengahasilkan sebuah torsi untuk motor seri. Di dalam motor seri, arus
medan seri dan jangkar sama dan fluks (φ ) medan seri selamanya
sebanding dengan arus jangkar Ia. Persamaan torsi untuk kerja motor seri
bias diekspresikan dengan hubungan , menjadi : K.Ia2.Pada posisi motor dc pada hubungan Kompon, medan mungkin dipasang
dalam bentuk rangkaian kompon panjang (komulatif) dan kompon pendek
(diferensial). Tanpa memperhatikan cara merangkai, bagaimanapun juga
arus dalam rangkaian medan shunt dan fluks medan pada dasarnya konstan
selama menghidupkan atau keadaan bekerja.
Arus dalam medan seri merupakan sebuah fungsi arus beban yang dibuat
oleh jangkar. Persamaan dasar torsi untuk kerja motor compound komulatif
adalah : T = K (φ f +φ s) Ia..
Dimana fluks medan seri φ s adalah fungsi arus jangkar Ia. Bermula dari fluks
medan shunt, ketika tanpa beban dan saat berbeban, dimana meningkatkan
arus jangkar, motor compound komulatif menghasilkan kurva torsi yang selalu
lebih besar dari pada motor shunt selama arus jangkar sama.
Untuk persamaan compound diferensial, persamaan torsi menjadi :
T = K (φ f - φ s) Ia.
Dimana φ s sebuah fungsi Ia dan φ f konstan. Bermula denganfluks medan
shunt untuk tanpa beban, nilai sembarang pada arus jangkar akan
menghasilkan medan magnit medan seri (reaksi jangkar pada medans eri)
dimana menghasilkan fluks total pada celah udara. Jadi motor kompoun
diferensial menghasilkan kurva torsi yang selalu kecil atau rendah dari motor
shunt.
6. Karakteristik Kecepatan Motor DCDari persamaan 12 memberikan sebuah arti suatu kebenaran
kecepatan pada setiap motor.
Motor shunt pada saat fluks medan pada motor dianggap konstan, kecepatan
pada motor dinyatakan dalam persamaan kecepatan :
Modul Ajar “Motor Arus Searah” 8

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 9/11
Modul_5223-118-3
(13)
Berkurangnya EMF yang berlawanan juga akan berkurangnya putaran.Berkurangnya nilai EMF dari tanpa beban dengan beban penuh kira-kira 20%.
Persamaan kecepatan untuk rangkaian motor seri :
(14)
persamaan diatas menunjukkan pada karakteristik berbeban fungsi
kecepatan motor seri.
Jika beban motor relative kecil yang digunakan tangkai jangkar pada motor seri, arus jangkar Ia kecil, membuat pembilang pecahan persamaan menjadi
besar dan penyebut menjadi kecil, kecepatan akan melampaui batas.
Sebagai alas an ini, motor seri kerjanya selalu dihubungkan dengan beban,
seperti lift Derek atau alat penaik dc.
Pembilang pada persamaan berkurang lebih cepat dari pada peningkatan
penyebutnya (pembilang disebabkan oleh Ia)
Persamaan kecepatan untuk motor compound kumulatif dituliskan sebagai
berikut :
(15)
dan lebih lanjut disederhanakan menjadi :
(16)
dengan memperbandingkan persamaan diatas untuk motor compound
kumulatif dengan n = C Ea/φ f untuk motor shunt, hal ini merupakan bukti
bahwa fluks yang dihasilkan oleh medan seri juga meningkat karena
peningkatan arus beban dan jangkar, sewaktu EMF lawan berkurang. Oleh
karena itu penyebut meningkat sebanding dengan saat pembilang berkurang
banyak dari pada motor shunt. Akibatnya adalah kecepatan motor kompoun
kumulatif akan jatuh pada tafsiran yang lebih cepat dari pada kecepatan
motor shunt dengan merubah-rubah beban.
Modul Ajar “Motor Arus Searah” 9
f f
IaRaVaC
C
Ean
φ φ
−==
'
( )
φ C
Rsra IaVan
+−=
s f
Rs Ra IaVaC n
φ +
+−=
)(
total s f
CEc EaC
φ φ φ =
+
=

5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 10/11
Modul_5223-118-3
7. Efisiensi dan Rugi-Rugi.Rugi yang terjadi dalam mesin arus searah adalah :
1. Rugi besi
Terdiri dari : rugi histerisis dan rugi arus ‘eddy’
2. Rugi listrik
Rugi ini dikenal sebagai rugi tembaga (I2R).
3. Rugi mekanik
Rugi ini terdiri dari : rugi geser pada sikat, rugi geser pada sumbu, dan rugi
angina.
4. Aliran daya untuk mesin arus searah dapat digambarkan seperti terlihat
pada gambar 7. disini digambarkan aliran daya untuk motor, sedangkan
untuk generator aliran daya adalah sebaliknya.
Gambar 7. Rugi-Rugi
(17)
Modul Ajar “Motor Arus Searah” 10
Daya
Masuk
VtIL VtIa
A
E
D
C
B
F
EaIa
Daya mekanis
pada sumbu
rugidayakeluar
dayakeluar Efisiensi
Σ+=η
5/8/2018 ModulMotor DC - slidepdf.com
http://slidepdf.com/reader/full/modulmotor-dc 11/11
Modul_5223-118-3
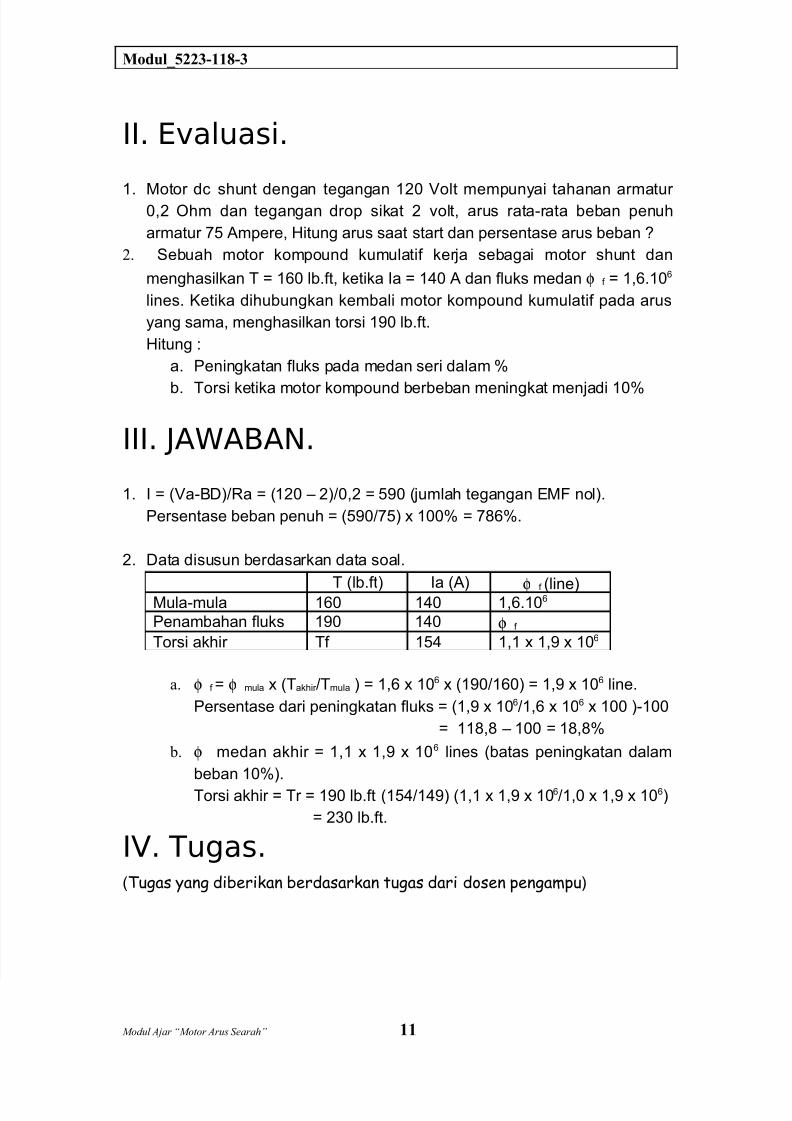
II. Evaluasi.
1. Motor dc shunt dengan tegangan 120 Volt mempunyai tahanan armatur 0,2 Ohm dan tegangan drop sikat 2 volt, arus rata-rata beban penuh
armatur 75 Ampere, Hitung arus saat start dan persentase arus beban ?
2. Sebuah motor kompound kumulatif kerja sebagai motor shunt dan
menghasilkan T = 160 lb.ft, ketika Ia = 140 A dan fluks medan φ f = 1,6.106
lines. Ketika dihubungkan kembali motor kompound kumulatif pada arus
yang sama, menghasilkan torsi 190 lb.ft.
Hitung :
a. Peningkatan fluks pada medan seri dalam %
b. Torsi ketika motor kompound berbeban meningkat menjadi 10%
III. JAWABAN.
1. I = (Va-BD)/Ra = (120 – 2)/0,2 = 590 (jumlah tegangan EMF nol).
Persentase beban penuh = (590/75) x 100% = 786%.
2. Data disusun berdasarkan data soal.
T (lb.ft) Ia (A) φ f (line)Mula-mula 160 140 1,6.106
Penambahan fluks 190 140 φ f
Torsi akhir Tf 154 1,1 x 1,9 x 106
a. φ f = φ mula x (Takhir /Tmula ) = 1,6 x 106 x (190/160) = 1,9 x 106 line.
Persentase dari peningkatan fluks = (1,9 x 106/1,6 x 106 x 100 )-100
= 118,8 – 100 = 18,8%
b. φ medan akhir = 1,1 x 1,9 x 106 lines (batas peningkatan dalam
beban 10%).
Torsi akhir = Tr = 190 lb.ft (154/149) (1,1 x 1,9 x 106/1,0 x 1,9 x 106)
= 230 lb.ft.
IV. Tugas.(Tugas yang diberikan berdasarkan tugas dari dosen pengampu)
Modul Ajar “Motor Arus Searah” 11