kalibrasi dan karakterisasi pencacah...
TRANSCRIPT

1
LAPORAN PENELITIAN
HIBAH TEACHING DRANT PROGRAM SP4 BATCH I
TAHUN ANGGARAN 2005
KALIBRASI DAN KARAKTERISASI PENCACAH PUTARAN
BERBASIS MIKROKONTROLER
Penanggung Jawab Kegiatan Penelitian :
Drs. SUMARNA
AGUS PURWANTO, M. Sc.
Drs. A. MARYANTO
RESTU WIDIATMONO, M. Si.
PUJIANTO, S.Pd. Si.
JURUSAN PENDIDIKAN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS NEGERI YOGYAKARTA
TAHUN 2005
Penelitian ini dibiayai oleh : Program SP4 Batch I Tahun II Jurdik Fisika
Nomor Kontrak : 04/Kontrak/J.35/KU/VI/2005 Tanggal 6 Juni 2005
2
KATA PENGANTAR
Puji dan syukur yang sedalam-dalamnya dipanjatkan ke hadlirat Alloh S.w.t., Tuhan
seru sekalian alam, atas segala karunia-Nya sehingga dapat tersusun laporan penelitian
mengenai Kalibrasi dan Karakterisasi Pencacah Putaran Berbasis Mikrokontroler.
Penelitian ini dapat terlaksana juga karena bantuan dari berbagai pihak. Oleh karena
itu, terima kasih yang sebesar-besarnya dan penghargaan yang setinggi-tingginya
disampaikan kepada :
1. Pimpinan Proyek Pengembangan Universitas Negeri Yogyakarta yang telah
memberikan kesempatan,
2. Pimpinan Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Negeri
Yogyakarta yang telah memberikan kesempatan dan dorongan,
3. Teman-teman dosen di Jurusan Pendidikan Fisika FMIPA UNY atas diskusi dan
masukan-masukannya,
4. Berbagai pihak yang tidak sempat disebutkan satu per satu yang telah membantu
terselenggaranya penelitian ini.
Semoga hasil penelitian ini dapat bermanfaat. Koreksi dan saran dari para pengguna
dan pemerhati diterima dengan hati terbuka dan penuh penghargaan.
Yogyakarta, 20 Nopember 2005
a/n. Tim Peneliti,
Sumarna
Agus Purwanto
A. Maryanto
Restu Widiatmono
Pujianto

3
DAFTAR ISI
HALAMAN JUDUL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
KATA PENGANTAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ii
DAFTAR ISI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
ABSTRAK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iv
BAB I PENDAHULUAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1. Latar Belakang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2. Rumusan Masalah . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
3. Tujuan Penelitian . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
4. Manfaat Penelitian . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
BAB II KAJIAN TEORITIK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1. Konsep Dasar Pencacahan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2. Mikrokontroler AT89 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
BAB III METODOLOGI PENELITIAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1. Obyek Penelitian . . . . . . . . . . . . . . . . . . . 10
2. Teknik Pengumpulan Data . . . . . . . . . . . . . . . . . . . 10
3. Instrumen Untuk Mendapatkan Data . . . . . . . . . . . . . . . . . . . 10
4. Teknik Analisis Data . . . . . . . . . . . . . . . . . . . 11
BAB IV HASIL PENELITIAN DAN PEMBAHASAN . . . . . . . . . . . . . . . . . . 12
1. Realisasi Instrumen Pencacah Putaran . . . . . . . . . . . . . . . . . . 12
2. Realisasi Program . . . . . . . . . . . . . . . . . . 15
3. Hasil Penelitian Dan Pembahasan . . . . . . . . . . . . . . . . . . 18
BAB V KESIMPULAN DAN SARAN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1. Kesimpulan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2. Saran . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
DAFTAR PUSTAKA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20

4
KALIBRASI DAN KARAKTERISASI PENCACAH PUTARAN
BERBASIS MIKROKONTROLER
(Oleh : Sumarna, Agus Purwanto, A. Maryanto, Restu Widiatmono, Pujianto)
ABSTRAK
Tujuan Penelitian ini adalah untuk membuat alat ukur pencacah putaran yang
berbasis mikrikontroler dengan waktu respon, ketepatan dan resolusi yang memadai (dapat
memenuhi kebutuhan pengukuran sederhana sehari-hari), serta untuk mengetahui putaran
tertinggi yang dapat terukur dengan benar.
Hasil dari penelitian ini adalah telah dibuat alat ukur pencacah putaran yang
berbasis mikrikontroler dengan waktu respon 7,89 x 10-3
detik; ketepatan 99,2 %; dan
resolusi 0,00789 putaran (untuk piringan dengan demensi seperti pada instrumen
penelitian). Putaran tertinggi yang dapat terukur dengan benar adalah 127 putaran per detik
atau 7620 rpm (putaran per menit).

5
BAB I
PENDAHULUAN
1. Latar Belakang
Pencacah (counter) dan pewaktu (timer) merupakan piranti yang sangat berguna
dalam menentukan baik cacah (frekuensi) maupun selang (durasi) terjadinya suatu
peristiwa atau proses, terutama bagi peristiwa atau proses yang berulang (periodik). Salah
satu kegunanannya adalah dengan mengetahui frekuensi terjadinya suatu peristiwa dapat
ditentukan besaran lain yang terkait dengan frekuensi tersebut seperti energi. Persoalan
pencacah dan pewaktu pada umumnya terletak pada respon piranti, ketepatan, dan resolusi.
Untuk mencacah frekuensi tinggi (bahkan sangat tinggi) diperlukan komponen yang
memiliki respon cepat. Demikian juga halnya untuk mengukur selang waktu yang sangat
pendek diperlukan piranti sistem pewaktu dengan ketepatan dan resolusi yang memadai.
Kedua persoalan tersebut sebenarnya terkait, untuk dapat mengukur selang waktu yang
sangat pendek diperlukan komponen yang memiliki respon cepat.
Laboratorium Jurusan Pendidikan Fisika memiliki alat ukur frekuensi yang cukup
banyak dan bervariasi dalam hal kemampuannya. Salah satunya adalah frekuensimeter
yang dapat mengukur hingga 1 GHz. Tetapi dari sekian banyak alat ukur frekuensi belum
ada yang didesain untuk mengukur cacah putaran (mekanik). Padahal, banyak mahasiswa
yang memerlukan alat tersebut untuk menyelesaikan tugas akhirnya. Misalnya ada yang
memerlukan untuk mengukur putaran kipas angin, mengukur cacah putaran pengaduk pada
alat semacam blender, mengukur putaran mesin sepeda motor, dan sebagainya. Semua itu
memerlukan alat pencacah putaran dengan spesifikasi tertentu. Spesifikasi yang paling
penting adalah bahwa alat tersebut dapat mengukur putaran yang relatif sangat cepat.
Dengan mencermati perkembangan teknologi alat-alat laboratorium, hal yang paling
mungkin untuk dapat mewujudkan alat yang dapat mengukur putaran cepat adalah dengan
memanfaatkan teknologi mikrokontroler. Pengndalian dan pemberian komando kepada alat
ukur secara manual hampir tidak bisa dipercaya bila dituntut memiliki ketepatan dan
kecepatan yang tinggi.

6
2. Rumusan Masalah
a. Dapatkah dibuat alat ukur pencacah putaran yang berbasis mikrikontroler
dengan waktu respon, ketepatan dan resolusi yang memadai (dapat memenuhi
kebutuhan pengukuran sederhana sehari-hari) ?
b. Putaran tertinggi berapakah yang dapat terukur dengan benar ?
3. Tujuan Penelitian
a. Membuat alat ukur pencacah putaran yang berbasis mikrikontroler dengan
waktu respon, ketepatan dan resolusi yang memadai (dapat memenuhi
kebutuhan pengukuran sederhana sehari-hari).
b. Mengetahui putaran tertinggi yang dapat terukur dengan benar.
2. Manfaat Penelitian
a. Tersedianya alat pencacah putaran (meskipun relatif terbatas) yang dapat
dimanfaatkan oleh para mahasiswa (dan dosen) untuk menyelesaikan
penelitinnya.
b. Oleh karena alat yang terwujud berbasis mikrokontroler, maka data hasil
pengukuran dapat langsung diolah melalui komputer.

7
BAB II
KAJIAN TEORITIK
1. Konsep Dasar Pencacahan
Pekerjaan mencacah suatu hal (dapat benda atau peristiwa) termasuk pekerjaan
pokok dalam mempelajari fenomena alam. Hal-hal yang dapat dicacah misalnya jumlah
pukulan, putaran, kedipan, atau apapun yang dapat dikelompokkan ke dalam kesatuan
(unit) yang diskrit. Jika hasil cacahan tersebut dikaitkan dengan waktu, maka diperoleh
besaran kejadian per satuan waktu (EPUT : events per unit time), sedangkan kejadian per
satuan waktu di bawah keadaan yang tetap (steady state) dikenal sebagai frekuensi.
Kejadian per satuan waktu tidak harus bergantung pada keadaan tetap, dan istilah tersebut
mencakup pencacahan yang terjadi secara sporadis ataupun sebentar-sebentar. Contohnya
adalah pencacahan berbagai partikel yang dipancarkan dari suatu sumber radioaktif.
Interval waktu (durasi) juga sering diukur, dan interval itu menjadi frekuensi ketika
durasinya merupakan siklus dari kejadian yang periodik. Peristiwa atau fenomena yang
terjadinya tidak menentu juga sering diukur interval waktunya, atau bahkan durasi peristiwa
sesaat (one shoot) seperti gaya atau tekanan impulsif.
Persoalan pencacahan atau pewaktuan terutama muncul ketika kejadiannya sangat
cepat yang ditentukan melalui pengamatan langsung, atau pada pengukuran interval waktu
yang durasinya sangat pendek, atau juga penentuan akurasi pengukuran waktu. Pada
umumnya terkait dengan pengukuran cacah dan waktu dapat digolongkan ke dalam :
1. Pencacahan dasar, menentukan total cacahan atau menentukan pencapaian cacahan
yang telah ditetapkan sebelumnya.
2. Jumlah kejadian atau hal per satuan waktu (EPUT) yang bebas terhadap laju
kejadian.
3. Frekuensi, atau jumlah siklus dari peristiwa-peristiwa yang berulang (eriodik) secara
serba sama (uniform) tiap satuan waktu.
4. Interval waktu antara dua keadaan atau kejadian yang ditentukan sebelumnya.
5. Hubungan fase, atau bagian periode antara peristiwa-peristiwa atau keadaan berulang
yang ditentukan sebelumnya.
8
2. Mikrokontroler AT89
Munculnya mikrokontroler berawal dari kebutuhan akan suatu alat khusus yang
dapat dijalankan secara otomatis, praktis, dan memiliki kemampuan untuk melaksanakan
perintah-perintah yang diinginkan. Dalam hal penggunaannya, mikrokontroler lebih banyak
diaplikasikan secara deterministik, yaitu dipakai untuk keperluan khusus (pada umumnya
sebagai pengendali). Perkembangan teknologi semikonduktor memungkinkan untuk
memenuhi kebutuhan tersebut.
Bagian fungsional utama suatu mikrokontroler adalah CPU / Mikroprosesor (yang
berisi ALU, unit kendali, register, dan pengkode), Memori dan Sistem I/O. Ketiga bagian
tersebut secara fungsional (dengan fungsi masing-masing) membentuk satu sistem
mikrokontroler dan berada di dalam satu chip. Jadi, sebuah mikroprosesor yang
digabungkan dengan I/O dan memori (RAM,ROM) dalam satu chip itulah yang dikenal
sebagai mikrokontroler. Perbedaan antara mikrokontroler dengan mikrokomputer (seperti
IBM PC) terletak pada arsitektur, penggunaan I/O interface dan media penyimpan yang
berbeda. Media penyimpan mikrokomputer antara lain menggunakan disket, sedangkan
pada mikrokontroler menggunakan EPROM.
Fasilitas yang terdapat di dalam chip mikrokontroler AT89S51 yang pokok di
antaranya adalah :
a. Dua (2) sistem Timer/Counter (T0 dan T1)
b. Empat (4) port paralel I/O yang masing-masing berukuran 8 bit (P0, P1, P2, dan P3).
c. Dua (2) sistem Interupsi (INT0 dan INT1).
d. Sepasang kendali komunikas (RXD dan TXD).
e. RAM 8 x 128 byte dan Flash memory 4 Kbyte.
Gambar chip mikrokontroler AT89S51 yang bertipe DIP-40 adalah sebagai berikut :

9
Untuk aplikasi dan keperluan belajar, di pasaran banyak tersedia pilihan chip
mikrokontroler. Salah satu pilihan tersebut adalah AT89S51 buatan ATMEL. Beberapa
pertimbangan memilih mikrokontroler tersebut antara lain :
a. Murah.
b. Sebagai model.
c. Populer di kalangan masyarakat khususnya mahasiswa.
d. Cocok untuk menangani data dengan durasi detik.
e. Kompatibel dengan mikrokontroler buatan INTEL MCS-51 dan buatan ATMEL sendiri
seperti AT89C51/52/53, AT89S8252.
f. Memiliki Flash memory dengan cara dan alat perograman yang sederhana.
Selain pengetahuan persambungan dalam hardware, pemahaman akan peta memori
dan register di dalam chip AT89S51 memiliki peran yang sangat penting dalam proses
penyusunan program. Register terletak di dalam CPU (mikroprosesor) dan pada umumnya
Vcc
P0.0 (AD0)
P0.1 (AD1)
P0.2 (AD2)
P0.3 (AD3)
P0.4 (AD4)
P0.5 (AD5)
P0.6 (AD6)
P0.7 (AD7)
EA/VPP
ALE/PROG
PSEN
P2.7 (A15)
P2.6 (A14)
P2.5 (A13)
P2.4 (A12)
P2.3 (A11)
P2.2 (A10)
P2.1 (A9)
P2.0 (A8)
P1.0
P1.1
P1.2
P1.3
P1.4
(MOSI) P1.5
(MISO) P1.6
(SCK) P1.7
RST
(RXD) P3.0
(TXD) P3.1
(INT0) P3.2
(INT1) P3.3
(T0) P3.4
(T1) P3.5
(WR) P3.6
(RD) P3.7
XTAL2
XTAL1
GND
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20

10
berguna untuk menampung data sementara. Selain untuk menampung data sementara, ada
register yang berfungsi sebagai tempat terjadinya operasi aritmatik dan logik, yaitu register
accumulator (register A). Memori (berupa ROM atau RAM) berguna sebagai tempat
untuk menampung data dan instruksi yang terletak di luar CPU (mikropsosesor). AT89S51
memiliki struktur memori yang terdiri atas :
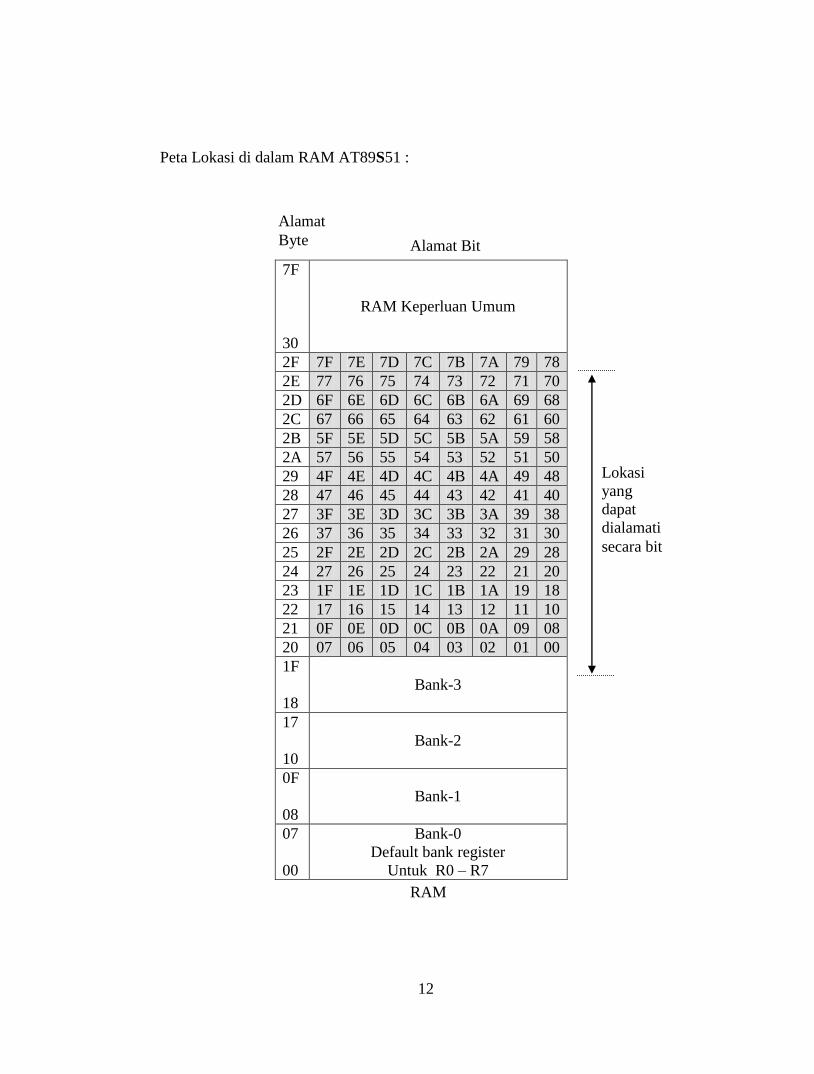
1. RAM Internal, biasanya digunakan untuk menyimpan variabel atau data yang bersifat
sementara. Di dalam RAM internal terdapat 8 (delapan) Bank Register dengan
mnemonik R0, R1, R2, R3, R4, R5, R6, dan R7. Delapan buah register pertama terletak
pada alamat 00 h hingga 07 h dan membentuk Bank 0 (sebagai default). Posisi R0 s/d
R7 dapat dipindahkan ke bank yang lain dengan mengatur bit RS0 dan RS1. Bank 1
beralamatkan 08 h s/d 0F h. Bank 2 terletak pada alamat 10 h s/d 17 h, dan bank 3
menempati alamat 18 h s/d 1F h. R0 dan R1 adalah dua buah register yang dapat
digunakan sebagai pointer dari sebuah lokasi memori pada RAM internal tersebut. Di
dalam RAM internal pada alamat 20 h hingga 2F h dapat diakses dengan cara
pengalamatan bit sehingga hanya dengan sebuah instruksi setiap bit dalam daerah ini
dapat di-set, di-clear, di-AND dan di-OR. Di dalam RAM internal juga terdapat RAM
untuk keperluan umum yang dimulai dari alamat 30 h hingga 7F h.
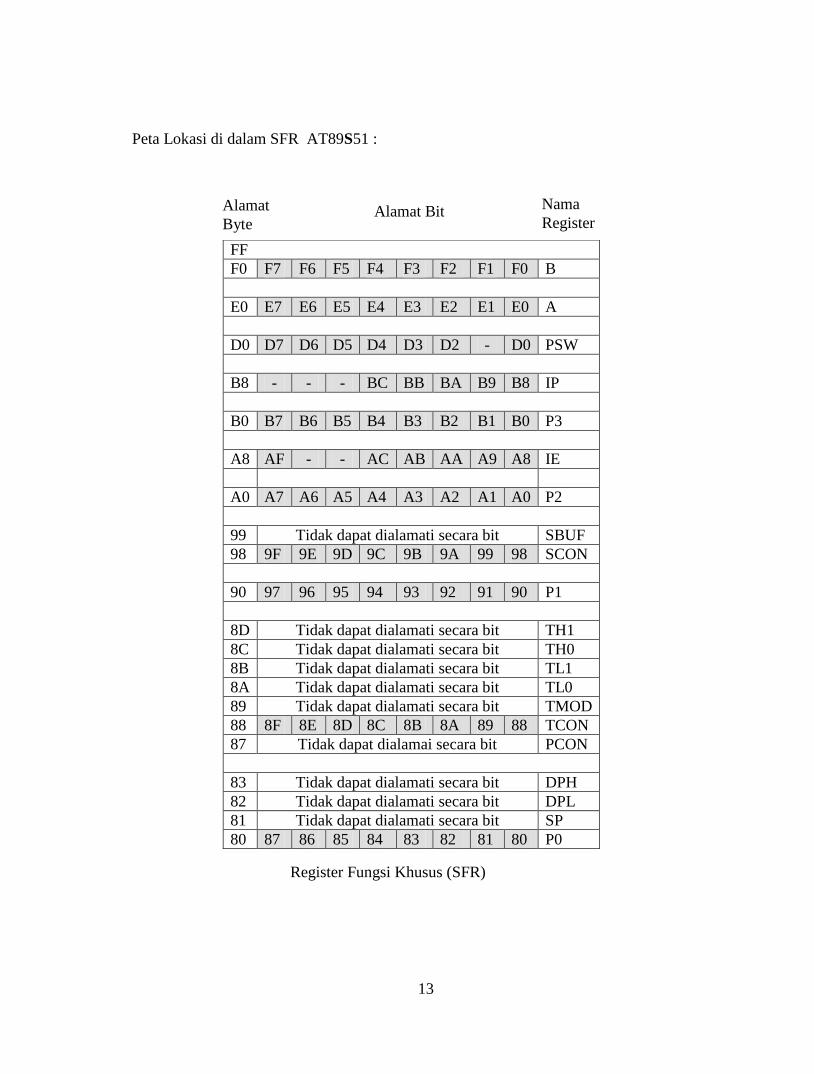
2. SFR (Special Function Register), berisi register-register yang memiliki fungsi khusus
yang disediakan oleh chip AT89S51. SFR terletak pada alamat antara 80 h hingga FF
h. Berikut ini disampaikan daftar register di dalam chip AT89S51 dengan fungsi khusus
(SFR : Special Function Register).

11
No. Register Mnemonic Alamat
1. Akumulator A atau ACC E0 h
2. B B F0 h
3. Port 0 P0 80 h
4. Port 1 P1 90 h
5. Port 2 P2 A0 h
6. Port 3 P3 B0 h
7. Interupt Enable IE A8 h
8. Stack Pointer SP 81 h
9. Data Pointer (total) DPTR 82 h – 83 h
10. Data Pointer Low Byte DPL 82 h
11. Data Pointer High Byte DPH 83 h
12. Power Control PCON 87 h
13. Timer/Counter Control TCON 88 h
14. Timer/Counter Control Mode TMOD 89 h
15. Timer/Counter 0 Low Byte TL0 8A h
16. Timer/Counter 1 Low Byte TL1 8B h
17. Timer/Counter 0 High Byte TH0 8C h
18. Timer/Counter 1 High Byte TH1 8D h
19. Serial Port Control SCON 98 h
20. Serial Data Port SBUF 99 h
21. Interupt Control Priority IP B8 h
22. Program Status Word PSW D0 h
3. Flash PEROM (Programmable and Erasable ROM), digunakan untuk menyimpan
program aplikasi yang disusun oleh pemrogram. Flash PEROM tersebut dapat ditulis
atau dihapus berulang-ulang (1000 kali) menggunakan perangkat pemrogram
(downloader), misalnya dengan AEC_ISP. Program yang ada dalam Flash PEROM
dapat dijalankan jika pada saat sitem di-reset, maka pena EA/VPP berlogika 1 (satu).
12
Peta Lokasi di dalam RAM AT89S51 :
7F
30
RAM Keperluan Umum
2F 7F 7E 7D 7C 7B 7A 79 78
2E 77 76 75 74 73 72 71 70
2D 6F 6E 6D 6C 6B 6A 69 68
2C 67 66 65 64 63 62 61 60
2B 5F 5E 5D 5C 5B 5A 59 58
2A 57 56 55 54 53 52 51 50
29 4F 4E 4D 4C 4B 4A 49 48
28 47 46 45 44 43 42 41 40
27 3F 3E 3D 3C 3B 3A 39 38
26 37 36 35 34 33 32 31 30
25 2F 2E 2D 2C 2B 2A 29 28
24 27 26 25 24 23 22 21 20
23 1F 1E 1D 1C 1B 1A 19 18
22 17 16 15 14 13 12 11 10
21 0F 0E 0D 0C 0B 0A 09 08
20 07 06 05 04 03 02 01 00
1F
18
Bank-3
17
10
Bank-2
0F
08
Bank-1
07
00
Bank-0
Default bank register
Untuk R0 – R7
Alamat
Byte Alamat Bit
RAM
Lokasi
yang
dapat
dialamati
secara bit
13
Peta Lokasi di dalam SFR AT89S51 :
FF
F0 F7 F6 F5 F4 F3 F2 F1 F0 B
E0 E7 E6 E5 E4 E3 E2 E1 E0 A
D0 D7 D6 D5 D4 D3 D2 - D0 PSW
B8 - - - BC BB BA B9 B8 IP
B0 B7 B6 B5 B4 B3 B2 B1 B0 P3
A8 AF - - AC AB AA A9 A8 IE
A0 A7 A6 A5 A4 A3 A2 A1 A0 P2
99 Tidak dapat dialamati secara bit SBUF
98 9F 9E 9D 9C 9B 9A 99 98 SCON
90 97 96 95 94 93 92 91 90 P1
8D Tidak dapat dialamati secara bit TH1
8C Tidak dapat dialamati secara bit TH0
8B Tidak dapat dialamati secara bit TL1
8A Tidak dapat dialamati secara bit TL0
89 Tidak dapat dialamati secara bit TMOD
88 8F 8E 8D 8C 8B 8A 89 88 TCON
87 Tidak dapat dialamai secara bit PCON
83 Tidak dapat dialamati secara bit DPH
82 Tidak dapat dialamati secara bit DPL
81 Tidak dapat dialamati secara bit SP
80 87 86 85 84 83 82 81 80 P0
Alamat Bit Alamat
Byte
Register Fungsi Khusus (SFR)
Nama
Register

14
BAB III
METODOLOGI PENELITIAN
1. Obyek Penelitian
Penelitian ini mengambil obyek alat pencacah putaran (counter) yang juga dapat
digunakan sebagai alat pengukur selang waktu (timer) yang dirancang dan dirangkai sendiri
dengan memanfaatkan komponen-komponen yang beredar di pasaran (tidak memesan
secara khusus ke pabrik).
2. Teknik Pengumpulan Data
Data dalam penelitian ini diperoleh melalui observasi. Variabel terikat yang diamati
adalah cacah putaran dari sebuah piringan yang laju putarannya dapat divariasi. Cacah
putaran tersebut juga ditampilkan melalui layar CRO sebagai piranti standar untuk
kalibrasi. Sedangkan variabel bebasnya adalah cacah putaran (frekuensi) yang muncul
dalam tampilan 7-segmen. Variabel bebas yang lain adalah cacah putaran tertinggi yang
dapat terukur dengan benar. Dalam menentukan cacah putaran tertinggi ditempuh dengan
memprbesar laju putaran piringan hingga putaran tertinggi di mana frekuensi putaran pada
alat standar (CRO dan SG) sama dengan cacah yang tampil pada 7-segmen.
3. Instrumen Untuk Mendapatkan Data
Instrumen yang dipergunakan untuk mendapatkan data dalam penelitian ini berupa
sistem peralatan pengukur cacah putran berbasis mikrokontroler buatan sendiri, SG (Signal
Generator), osiloskop (CRO), komputer, dan penguat sinyal. Keberadaan AFG adalah
tentatif sebagai pembanding, karena dengan osiloskop saja telah dapat mengukur frekuensi
putaran. Komputer digunakan untuk memasukkan program (download) ke dalam
mikrokontroler. Semua peralatan tersebut (kecuali komponen rangkaian pencacah) telah
tersedia di Laboratorium Pendidikan Fisika, FMIPA, UNY.

15
4. Teknik Analisis Data
Berkenaan dengan fenomena yang akan dipelajari melalui penelitian ini, maka data
percobaannya akan dianalisis dengan metode deskriftif kuantitatif. Cacah putaran yang
muncul pada tampilan 7-segmen dibandingkan dengan frekuensi pulsa yang terukur melalui
CRO. Untuk lebih meyakinkan lagi, akan digunakan generator sinyal (SG) sebagai
frekuensi pembanding atau standar yang lain.

16
BAB IV
HASIL PENELITIAN DAN PEMBAHASAN
1. Realisasi Instrumen Pencacah Putaran
Rangkaian Peraga 7-Segmen :
Rangkaian Pengendali Motor DC :
1 k
22 k
A 733
1 k
22 k
A 733
1 k
22 k
A 733
Vcc
180
180
b
a
f g
e
d
c
p
CA
E1
IN1
OUT1
GND
GND
OUT2
IN2
VC
VSS
IN4
OUT4
GND
GND
OUT3
IN3
E2
L293D
Mak. + 12 volt
+ 5 volt
Arah putar
Enable
7404
1 k
Motor DC
17
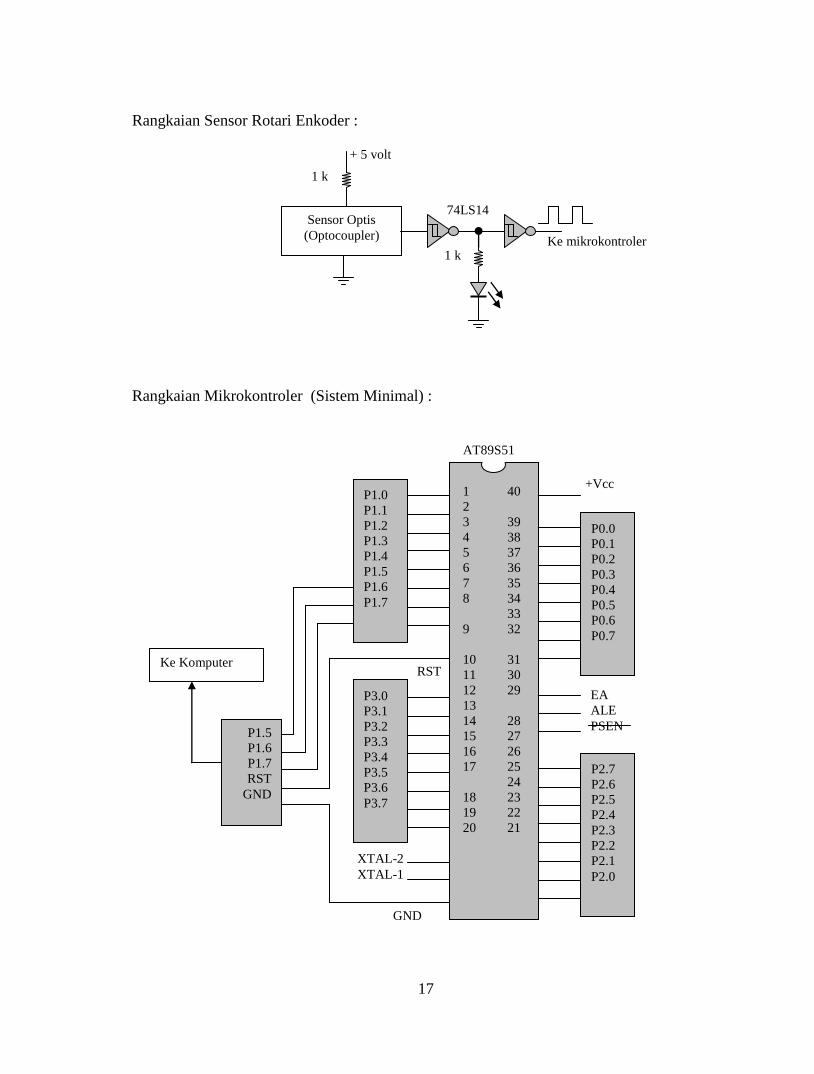
Rangkaian Sensor Rotari Enkoder :
Rangkaian Mikrokontroler (Sistem Minimal) :
+ 5 volt
Sensor Optis
(Optocoupler) Ke mikrokontroler 1 k
1 k
74LS14
1 40
2
3 39
4 38
5 37
6 36
7 35
8 34
33
9 32
10 31
11 30
12 29
13
14 28
15 27
16 26
17 25
24
18 23
19 22
20 21
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
P3.0
P3.1
P3.2
P3.3
P3.4
P3.5
P3.6
P3.7
RST
P0.0
P0.1
P0.2
P0.3
P0.4
P0.5
P0.6
P0.7
P2.7
P2.6
P2.5
P2.4
P2.3
P2.2
P2.1
P2.0
+Vcc
EA
ALE
PSEN
XTAL-2
XTAL-1
P1.5
P1.6
P1.7
RST
GND
GND
AT89S51
Ke Komputer
18
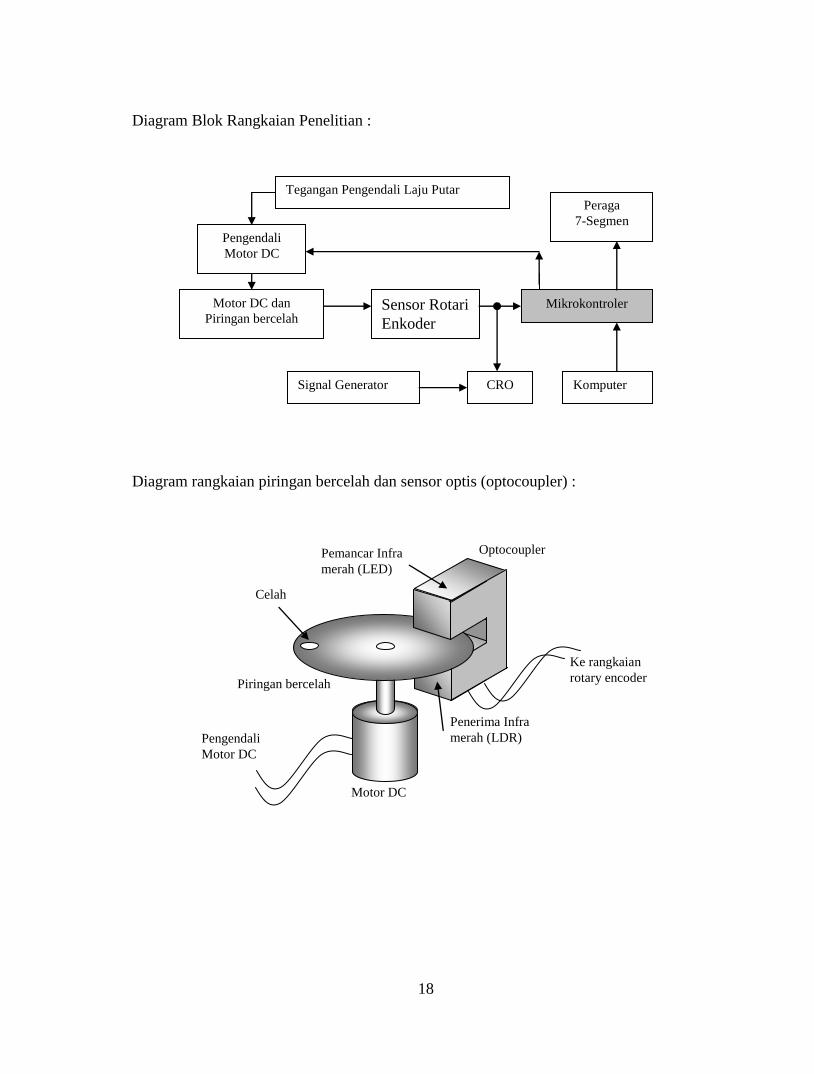
Diagram Blok Rangkaian Penelitian :
Diagram rangkaian piringan bercelah dan sensor optis (optocoupler) :
Motor DC dan
Piringan bercelah
Pengendali
Motor DC
Sensor Rotari
Enkoder
Mikrokontroler
Peraga
7-Segmen
CRO Signal Generator Komputer
Tegangan Pengendali Laju Putar
Motor DC
Optocoupler
Piringan bercelah
Penerima Infra
merah (LDR)
Pemancar Infra
merah (LED)
Ke rangkaian
rotary encoder
Pengendali
Motor DC
Celah

19
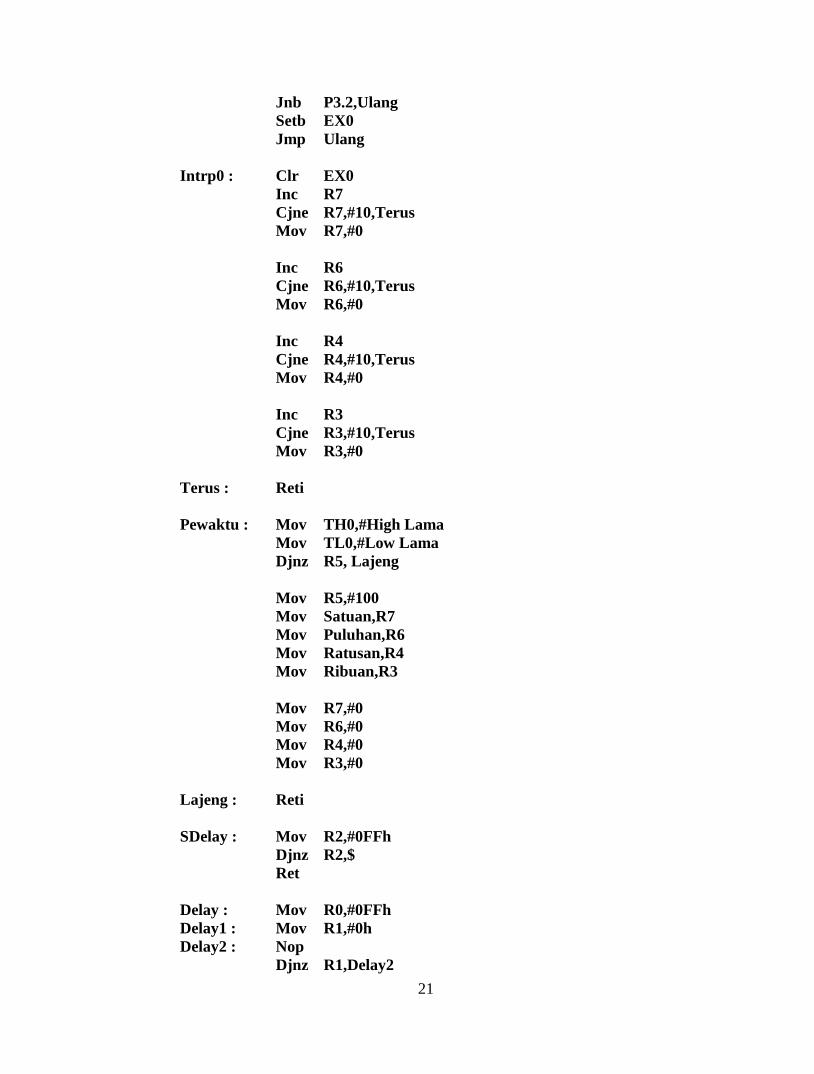
2. Realisasi Program
Realisasi program dalam assembly :
Org 0h
Jmp Mulai
Org 0003h
Jmp Intrp0
Org 000Bh
Jmp Pewaktu
Lama Equ -11250
Satuan Equ 30h
Puluhan Equ 31h
Ratusan Equ 32h
Ribuan Equ 33h
Mulai : Setb P2.4
Setb P2.3
Setb P2.2
Inisialisasi pencacah dan pewaktu ke nol
Enable pencacah dan pewaktu
Baca pencacah
Mengalikan hasil pencacahan dengan
konstanta kalibrasi
Mengubah ke desimal
Simpan di memori untuk ditampilkan
Ditampilkan ke peraga 7-segmen
Disable pencacah dan pewaktu
Mulai

20
Setb P2.1
Call Delay
Call Delay
Mov R5,#100
Mov R3,#0
Mov R4,#0
Mov R6,#0
Mov R7,#0
Mov TMOD,#1
Mov TH0,#High Lama
Mov TL0,#Low Lama
Setb EX0
Setb EA
Setb TR0
Setb ET0
Ulang : Mov Dptr,#Numeric
Clr A
Mov A,Satuan
MovC A,@A+Dptr
Mov P1,#11111101B
Mov P0,A
Dall Sdelay
Clr A
Mov A,Puluhan
MovC A,@A+Dptr
Mov P1,#11111011B
Mov P0,A
Dall Sdelay
Clr A
Mov A,Ratusan
MovC A,@A+Dptr
Mov P1,#11110111B
Mov P0,A
Dall Sdelay
Clr A
Mov A,Ribuan
MovC A,@A+Dptr
Mov P1,#11101111B
Mov P0,A
Dall Sdelay
21
Jnb P3.2,Ulang
Setb EX0
Jmp Ulang
Intrp0 : Clr EX0
Inc R7
Cjne R7,#10,Terus
Mov R7,#0
Inc R6
Cjne R6,#10,Terus
Mov R6,#0
Inc R4
Cjne R4,#10,Terus
Mov R4,#0
Inc R3
Cjne R3,#10,Terus
Mov R3,#0
Terus : Reti
Pewaktu : Mov TH0,#High Lama
Mov TL0,#Low Lama
Djnz R5, Lajeng
Mov R5,#100
Mov Satuan,R7
Mov Puluhan,R6
Mov Ratusan,R4
Mov Ribuan,R3
Mov R7,#0
Mov R6,#0
Mov R4,#0
Mov R3,#0
Lajeng : Reti
SDelay : Mov R2,#0FFh
Djnz R2,$
Ret
Delay : Mov R0,#0FFh
Delay1 : Mov R1,#0h
Delay2 : Nop
Djnz R1,Delay2

22
Djnz R0,Delay1
Ret
Numeric : DB 22h,77h,0A4h,25h,71h
DB 29h,28h,67h,20h,21h
End
3. Hasil Penelitian dan Pembahasan
Telah dibuat alat ukur pencacah putaran yang berbasis mikrikontroler yang bagian-
bagiannya seperti telah disampaikan pada bagian a) Realisasi instrumen pencacah putaran
dan b) Realisasi program. Pencacah tersebut dapat mencacah putaran piringan dengan
waktu respon 7,89 x 10-3
detik, karena cacahan tertinggi yang masih dapat direspon dan
benar (sesuai dengan pembacaan melalui CRO dan AFG) adalah 127 putaran per detik.
Berdasarkan hasil observasi, kesalahan tertinggi yang terjadi adalah 1 putaran tiap 127
putaran per detik atau dengan ketepatan mencapai 99,2 %. Oleh karena dapat mencacah
127 putaran per detik dengan benar berarti rangkaian pencacah tersebut memiliki resolusi
(daya pisah) 0,00789 putaran (untuk piringan dengan demensi seperti pada instrumen
penelitian). Hal ini berarti bahwa pencacah tersebut mampu merespon 0,00789 putaran.
Putaran tertinggi yang dapat terukur dengan benar adalah 127 putaran per detik atau
7620 rpm (putaran per menit) yang secara praktis dapat digunakan sebagai alat pencacah
putaran yang sangat memadai.
23
BAB V
KESIMPULAN DAN SARAN
1. Kesimpulan
a. Telah dibuat alat ukur pencacah putaran yang berbasis mikrikontroler dengan
waktu respon 7,89 x 10-3
detik; ketepatan 99,2 %; dan resolusi 0,00789 putaran
(untuk piringan dengan demensi seperti pada instrumen penelitian).
b. Putaran tertinggi yang dapat terukur dengan benar adalah 127 putaran per detik
atau 7620 rpm (putaran per menit).
2. Saran
a. Waktu respon alat dapat ditingkatkan lagi dengan menggunakan jenis
mikrokontroler AVR dan optocoupler yang lebih responsif.
b. Jika menggunakan alat tersebut, maka putaran mekanik dari objek yang hendak
diukur harus dapat memutar piringan yang dikenakan pada optocoupler atau
semacamnya.
24
DAFTAR PUSTAKA
1. Agfianto Eko Putra, 2002, Belajar Mikrokontroler AT89C51/52/55, Teori dan
Aplikasi, Gava Media, Yogyakarta.
2. Paulus Andi Nalwan, 2003, Teknik Antarmuka dan Pemrograman Mikrokontroler
AT89C51, PT Elex Media Komputindo, Jakarta.
3. Moh. Ibnu Malik, 2003, Belajar Mikrokontroler ATMEL AT89S8252, Gava Media,
Yogyakarta.
4. Arianto Widyatmo, Haryono Eduard, E. Fendy, 1994, Belajar Mikroprosesor-
Mikrokontroler melalui Komputer PC, PT Elex Media Komputindo, Jakarta.