implementasi sensor ldr pada alat pemasak nasi...
TRANSCRIPT

IMPLEMENTASI SENSOR LDR PADA ALAT PEMASAK NASI OTOMATIS
TUGAS AKHIR
ASMUDIN
140309245593
POLITEKNIK NEGERI BALIKPAPAN
JURUSAN TEKNIK ELEKTRONIKA
2017
i
IMPLEMENTASI SENSOR LDR PADA ALAT PEMASAKNASI OTOMATIS
TUGAS AKHIR
KARYA TULIS INI DIAJUKAN SEBAGAI SALAH SATUSYARAT UNTUK MEMPEROLEH GELAR AHLI MADYA
DARI POLITEKNIK NEGERI BALIKPAPAN
ASMUDIN140309245593
POLITEKNIK NEGERI BALIKPAPANJURUSAN TEKNIK ELEKTRONIKA
2017

ii
LEMBAR PENGESAHAN IMPLEMENTASI SENSOR
LDR PADA ALAT PEMASAK
NASI OTOMATIS
Diajukan oleh
ASMUDIN
140309245593
Menyetujui:
Dosen Pembimbing 1, Dosen Pembimbing 2,
Nuryanti,S.T,M.T Qory Hidayati,ST.,MT.
NIDN. 1129117603 NIDN. 0714118601
Penguji 1, Penguji 2,
FathurZainiR,ST.,MT. Drs.SuhaediM.T.
NIDN. 0028088503 NIDN. 0021016113
Mengetahui,
Ketua Jurusan Teknik Elektronika
Drs.SuhaediM.T.
NIDN. 0021016113

333
SURAT PERNYATAAN
Yang bertanda tangan di bawah ini :
Nama : Asmudin
Tempat/Tgl Lahir : Balikpapan, 07 Mei 1992
NIM : 140309245593
Menyatakan bahawa tugas akhir yang berjudul “IMPLEMENTASISENSOR LDR PADA ALAT PEMASAK NASI OTOMATIS” adalahbukan merupakan hasil karya tulis orang lain, baik sebagian maupun keseluruhankecuali dalam kutipan yang kami sebutkan sumbernya.
Demikian peryataan kami buat dengan sebenar-benarnya dan apabila
peryataan ini tidak benar kami bersedia mendapat sanksi akademis.
Balikpapan, 10 Juli 2017
Mahasiswa,
AsmudinNIM. 140309245593

44
SURAT PERNYATAAN PERSETUJUANPUBLIKASI KARYA ILMIAHKEPENTINGAN AKADEMIS
Sebagai civitas akademik Politeknik Negeri Balikpapan, saya yang
bertanda tangan dibawah ini :
Nama : Asmudin
NIM : 140309245593
Program Sudi : Teknik Elektronika
Judul TA : IMPLEMENTASI SENSOR LDR PADA ALATPEMASAKNASI OTOMATIS
Demi pengembangan ilmu pengetahuan, saya menyetujui untuk
memberikan hak kepada Politeknik Negeri Balikpapan untuk meyimpan,
mengalih media atau formatkan, mengelola dalam bentuk pangkalan data
(database), merawat, dan mempublikasikan tugas akhir saya selama tetap
mencantumkan nama saya sebagai penulis/pencipta.
Demikian pernyataan ini saya buat dengan sebenarnya.
Dibuat di : Balikpapan
Pada tanggal : 10 Juli 2017
Yang menyatakan,
Asmudin

55
Kupersembahkan sebuah karya kecil ini untuk Ayahanda dan Ibundaku
(Nurdin dan Asmawati), yang tiada pernah hentinya selama ini memberiku
semangat, doa, dorongan, nasehat dan kasih sayang serta pengorbanan yang tak
tergantikan hingga aku selalu kuat menjalani setiap rintangan yang ada
didepanku.
Saaudaraku terkasih
Amiluddin dan Asnur Ana Maharani
Terima kasih pula kepada keluarga kedua saya 3TE1 2014 atas semangat dan
bantuannya selama ini,
Team Engineering Plaza Balikpapan
Serta untuk semua pembaca

66
ABSTRACT
Automatic rice washer is designed to facilitate users in terms of cookingprocess of rice, it is also affected by technological advances that affect all aspectsof life in the community. All the resulting innovation aims to have a positiveimpact in everyday life.
Since long time the user cooks using rice cooker which process apart fromrice washing process, so innovation appears to combine both integrated processand work well.
This automatic rice washing tool utilizes LDR sensors as a hygienereference for rice, as well as a control system of Arduino Uno R3 microcontroller.The output system is a DC motor that acts as a rice washer driver, and thesolenoid valve functions as an automatic washing valve for rice washing water,and the servo motor serves as an automatic valve for the rice line to the ricecooking container. The LDR sensor reading result in this system determines thecleanliness of the rice through the refraction of the LED light that is directed tothe channel in which the water washed rice. Rice is said to be clean if Rsam ≤Rmaks, ie when the water resistance value of washing rice is smaller than thevalue of resistance Rmaks (60 Ohm). With the existence of this automated systemis expected to facilitate the user's homework and provide better options.
Keywords: Arduino Uno R3, Rice Laundering, DC Motor, Servo, Solenoid, LED

vii
ABSTRAK
Alat pencuci beras otomatis ini dirancang guna mempermudah pengguna
dalam hal proses memasak nasi, hal ini juga terpengaruh oleh kemajuan teknologi
yang mempengaruhi segala aspek kehidupan dalam masyarakat. Segala inovasi
yang dihasilkan bertujuan memberikan dampak positif dalam kehidupan sehari
hari.
Sejak lama pengguna memasak menggunakan rice cooker yang prosesnya
terpisah dari proses pencucian beras, sehingga munculah inovasi menggabungkan
kedua proses yang terintegrasi dan bekerja dengan baik.
Alat pencucian beras otomatis ini memanfaatkan sensor LDR sebagai acuan
kebersihan beras, serta sistem kendali berupa mikrokontroler Arduino Uno R3.
Sistem output berupa Motor DC yang berfungsi sebagai penggerak alat pencucian
beras, dan solenoid valve difungsikan sebagai katup otomatis saluran pembuangan
air pencucian beras, serta motor servo berfungsi sebagai katup otomatis saluran
beras menuju ke wadah pemasak nasi. Hasil pembacaan sensor LDR dalam sistem
ini menentukan kebersihan beras melalui pembiasan cahaya dari LED yang di
arahkan pada saluran yang di aliri air hasil pencucian beras. Beras dikatakan
sudah bersih jika Rsam ≤ Rmaks, yaitu saat nilai resistansi air hasil pencucian
beras lebih kecil dari nilai resistansi Rmaks (60 Ohm). Dengan adanya sistem
otomatis ini diharapkan akan memudahkan pekerjaan rumah pengguna dan
memberikan pilihan yang lebih baik
Kata kunci : Arduino Uno R3, Pencucian beras, Motor DC, Servo, Solenoid, LED
8888
KATA PENGANTAR
Dengan menyebut nama Allah SWT yang Maha Pengasih lagi Maha
Panyayang, Kami panjatkan puja dan puji syukur atas kehadirat-Nya, yang telah
melimpahkan rahmat, hidayah, dan inayah-Nya kepada kami, sehingga kami
dapat menyelesaikan Tugas Akhir dengan judul “Implementasi Sensor LDR Pada
Alat Pemasak Nasi”.
Dengan ini, penulis juga menyampaikan terima kasih kepada:
1. Allah SWT. Karena telah memberikan kelancaran, keberkahan, dan
keselamatan selama pembuatan dan penyelesaian Tugas Akhir ini.
2. Bapak Ramli, S.E., M.M., sebagai Direktur Politeknik Negeri Balikpapan.
3. Bapak Drs. Suhaedi, M.T., sebagai Ketua Jurusan Teknik Elektronika sekaligus
pembimbing saya dalam menyelesaikan tugas akhir ini.
4. Ibu Nur Yanti , S.T., M.T., dan Ibu Qory Hidayati, S.T., M.T., yang telah
meluangkan waktunya untuk membimbing dan memberikan pengarahan selama
pengerjaan Tugas Akhir ini.
5. Seluruh staf dan karyawan program studi Teknik Elektronika Politeknik Negeri
Balikpapan atas diskusi dan konsultasi yang diberikan.
6. Orang tua, saudara, dan keluarga yang telah memberikan dukungan baik materil
maupun spiritual.
7. Seluruh rekan dan keluarga Teknik Elektronika Industri angkatan 2014 yang
telah memberikan semangat dan banyak membantu dalam hal penyelesaian Tugas
Akhir ini.
8.Seluruh rekan Engineering Plaza Balikpapan yang selalu memberikan support
dan semangat dalam mengerjakan TA.
9. Seluruh pihak lain yang belum dapat penulis sebutkan satu per satu.
Terlepas dari semua itu, Kami menyadari sepenuhnya bahwa masih ada
kekurangan baik dari segi susunan kalimat maupun tata bahasanya. Oleh karena
itu dengan tangan terbuka kami menerima segala saran dan kritik dari pembaca
agar kami dapat memperbaiki makalah ilmiah ini.

99
Akhir kata kami berharap semoga makalah ilmiah tentang limbah dan
manfaatnya untuk masyarakan ini dapat memberikan manfaat maupun
inpirasi terhadap pembaca.
Balikpapan, 7 Juli 2017
Penulis

x DAFTAR ISI
Halaman
JUDUL ......................................................................................................................... i
LEMBAR PENGESAHAN ....................................................................................... ii
LEMBAR PERNYATAAN ......................................................................................iii
LEMBAR PERNYATAAN PERSETUJJUAN ...................................................... iv
LEMBAR PERSEMBAHAN .................................................................................... v
ABSTRACT ............................................................................................................... vi
ABSTRAK ................................................................................................................ vii
KATA PENGANTAR .............................................................................................viii
DAFTAR ISI ............................................................................................................... x
DAFTAR GAMBAR ................................................................................................ xii
DAFTAR TABEL ................................................................................................... xiv
BAB I PENDAHULUAN
1.1 Latar Belakang .................................................................................................... 1
1.2 Rumusan Masalah ............................................................................................... 2
1.3 Batasan Masalah.................................................................................................. 2
1.4 Tujuan Penelitian ................................................................................................ 2
1.5 Manfaat Penelitian .............................................................................................. 3
BAB II LANDASAN TEORI
2.1 Rice Cooker ......................................................................................................... 4
2.2 Arduino Uno R3 .................................................................................................. 5
2.3 LCD (Liquid Crystal Display) ............................................................................. 6
2.3.1 Pengendali / kontroler LCD (Liquid Crystal Display) ................................... 7
2.4 Sensor LDR (Light Dependent Resistor) ............................................................ 9
2.5 LED (Light Emitting Diode) ............................................................................. 10
2.6 Motor DC .......................................................................................................... 12
xi 2.7 Motor Servo ...................................................................................................... 13
2.8 Solenoid Valve ................................................................................................... 15
BAB III PERANCANGAN
3.1 Tempat dan Waktu ............................................................................................ 17
3.2 Peralatan dan Bahan yang digunakan .............................................................. 17
3.3 Proses perencanaan alat..................................................................................... 18
3.4 Perancangan sistem ........................................................................................... 19
BAB IV HASIL DAN PEMBAHASAN
4.1 Pengujian Motor servo ...................................................................................... 26
4.2 Pengujian Rangkaian Regulator ....................................................................... 27
4.3 Pengujian Tampilan LCD ................................................................................. 28
4.4 Pengujian Rangkaian Module LDR .................................................................. 29
4.5 Pengujian Motor DC ......................................................................................... 32
4.6 Pengujian Solenoid Valve................................................................................. 34
4.7 Pengujian Alat Keseluruhan ............................................................................. 35
BAB V PENUTUP
5.1 Kesimpulan ....................................................................................................... 38
5.2 Saran ................................................................................................................. 38
DAFTAR PUSTAKA ............................................................................................... xv
xii DAFTAR GAMBAR
Halaman
Gambar 2.1 Rice Cooker .......................................................................................... 4
Gambar 2.2 Rangkaian Kelistrikan Rice Cooker ..................................................... 4
Gambar 2.3 Papan Arduino Uno R3 ......................................................................... 6
Gambar 2.4 Bentuk LCD 16 x 2 ............................................................................... 7
Gambar 2.5 Simbol LDR .......................................................................................... 9
Gambar 2.6 Sensor LDR .......................................................................................... 10
Gambar 2.7 Bentuk dan symbol LED ...................................................................... 11
Gambar 2.8 Cara kerja LED ..................................................................................... 11
Gambar 2.9 Komponen Motor DC ........................................................................... 13
Gambar 2.10 Motor DC .............................................................................................. 13
Gambar 2.11 Komponen Penyusun Motor Servo ....................................................... 14
Gambar 2.12 Motor Servo .......................................................................................... 14
Gambar 2.13 Solenoid Valve ..................................................................................... 15
Gambar 2.14 Prinsip kerja Solenoid Valve ................................................................ 16
Gambar 3.1 Diagram Alir Proses Perencanaan ........................................................ 18
Gambar 3.2 Blok Diagram Alat Pemasak Nasi Otomatis ........................................ 19
Gambar 3.3 Diagram blok bagan B .......................................................................... 20
Gambar 3.4 Diagram Alir cara Kerja Alat ............................................................... 21
Gambar 3.5 Diagram alir program alat..................................................................... 22
Gambar 3.6 Proses fungsi-sungsi ............................................................................ 23
Gambar 3.7 Diagram alir pengambilan data............................................................. 24
Gambar 4.1 Pengujian Motor Servo ......................................................................... 27
Gambar 4.2 Contoh listing program LCD ................................................................ 29
Gambar 4.3 Hasil tampilan pada LCD ..................................................................... 29
Gambar 4.4 Module LDR ......................................................................................... 30
Gambar 4.5 Pengukuran air hasil pencucian beras ................................................... 31
Gambar 4.6 Air hasil pencucian beras ...................................................................... 31
xiii Gambar 4.7 Hasil pembacaan sensor LDR pada serial monitor ............................... 31
Gambar 4.8 Motor DC .............................................................................................. 33
Gambar 4.9 Driver motor ......................................................................................... 33
Gambar 4.10 Solenoid valve dan relay ....................................................................... 34

xiv DAFTAR TABEL
Tabel 3.1 Alat yang di gunakan ................................................................................ 17
Tabel 3.2 Bahan yang digunakan .............................................................................. 17
Tabel 4.1 Rangkaian motor servo dengan arduino.................................................... 24 Tabel 4.2 Hasil uji motor servo ................................................................................. 25
Tabel 4.3 Hasil pengujian tegangan output pada power supply ............................... 26
Tabel 4.4 Hasil pembacaan sensor LDR ................................................................... 30
Tabel 4.5 Pengujian motor DC.................................................................................. 31
Tabel 4.6 Pengujian Solenoid valve .......................................................................... 33
Tabel 4.7 Pengujian keseluruhan .............................................................................. 34
1 BAB I
PENDAHULUAN 1.1 Latar Belakang Masalah Seiring dengan kemajuan teknologi yang menyeluruh telah berpengaruh dalam segala aspek kehidupan baik di bidang ekonomi, politik,kebudayaan, seni dan bahkan di dunia pendidikan. Kemajuan teknologi adalah sesuatu yang tidak bisa kita hindari dalam kehidupan ini, karena kemajuan teknologi akan berjalan sesuai dengan kemajuan ilmu pengetahuan. Setiap inovasi diciptakan untuk memberikan manfaat positif bagi kehidupan manusia. Memberikan banyak kemudahan, serta sebagai cara baru dalam melakukan aktifitas manusia,salah satunya ialah proses memasak nasi. Sejak zaman dahulu proses memasak nasi menggunakan cara tradisional yaitu menggunakan kompor,panci dan dandang,dengan kemajuan teknologi dan berkembangnya zaman memasak nasi sekarang lebih mudah salah satunya yaitu terciptanya suatu peralatan rumah tangga yang bersumber daya dari listrik yang biasa dikenal dengan sebutan “RICE COOKER”. Rice cooker adalah peralatan memasak nasi yang memanfaatkan energy listrik untuk memanaskan elemen pemanas dan thermostat untuk mengontrol suhu/panas dalam alat pemasak nasi.
Rice cooker tidak bisa dipisahkan dari dapur keluarga Indonesia saat ini. Fungsinya sederhana, namun krusial untuk menghemat waktu. Dengan munculnya Rice Cooker dalam kehidupan masyarakat,banyak membantu pekerjaan rumah tangga khususnya dalam hal penanakan nasi sehingga dapat meringankan beban para ibu rumah tangga selain itu juga dapat menghemat biaya. Alat penanak nasi ini juga merupakan salah satu perangkat yang wajib ada di berbagai rumah makan dan restoran, karena masa kini rice cooker sudah bisa digunakan dalam dua fungsi, sebagai menanak nasi dan mode magic jar (menjaga nasi tetap hangat). Berdasarkan dari hasil pengamatan dan survei pada masyarakat, saat ini masih memanfaatkan rice cooker sebagai penanak nasi atau penghangat nasi. Menurut hasil wawancara dengan pihak masyarakat bahwasannya alat pemasak nasi yang digunakan masih bersifat manual mempunyai banyak kelemahan

2 diantaranya dalam proses persiapan memasak nasi yaitu proses mencuci beras yang membutuhkan tenaga dan waktu yang lebih sehingga masih merepotkan para pengguna. Dalam hal proses pencucian beras kita harus memeperhatikan lama waktu mencuci beras, karena hal ini dapat berpengaruh pada jumlah vitamin yang terkandung dalam beras. Vitamin mudah rusak dalam pengolahan dan mudah hilang karena tercuci atau terlarut oleh air, salah satu contoh vitamin yang larut dalam air adalah vitamin B1.(Roslinda Rasyid, et.al., 2014) Dengan adanya permasalahan di atas maka diperlukan sebuah alat pemasak nasi otomatis yang terintegrasi dengan alat pencuci beras otomatis dengan memanfaatkan sensor LDR guna mengatasi masalah tersebut. Dengan alat ini dapat dilakukan proses pencucian beras secara otomatis. Dengan demikian diharapkan proses memasak nasi diharapkan lebih efektif dan optimal dalam mempersingkat waktu juga dalam hal tenaga, sehingga akan memudahkan proses memasak nasi oleh para ibu rumah tangga. 1.2 Rumusan Masalah Berikut ini beberapa rumusan masalah yang akan diteliti, antara lain: 1. Bagaimana impelementasi sensor LDR pada alat pencuci beras? 2. Bagaimana merancang sistem kontrol otomatis pencucian beras pada alat pemasak nasi berbasis mikrokontoler Arduino Uno R3? 1.3 Batasan Masalah Adapun beberapa batasasan masalahnya, antara lain sebagai berikut : 1. Perancangan alat pencuci beras pada alat pemasak nasi menggunakan Arduino Uno R3, agar dapat dikontrol dengan otomatis. 2. Menggunakan sensor LDR sebagai indikasi kebersihan beras pada proses pencucian beras. 3. Pengukuran tingkat kekeruhan air hanya dilakukan berdasarkan prinsip bias cahaya saja. 1.4 Tujuan penelitian Adapun tujuan dari penelitian ini di antaranya adalah

3 1. Membuat alat pencuci beras otomatis pada alat pemasak nasi yang bekerja secara otomatis dan terintegrasi dengan senso LDR. 2. Menbuat alat pemasak nasi inovasi terbaru yang terintegrasi dengan alat pencuci beras. 1.5 Manfaat penelitian Adapun manfaat dari penelitian ini diantaranya adalah 1. Dapat mengaplikasikan kemampuan yang dimiliki kepada masyarakat. 2. Dapat membantu masyarakat dalam hal memenuhi ke efektifitasan kepuasan pangan sehari-hari.. 3. Dapat menambah wawasan pembaca mengenai pemanfaatan Arduino Uno R3 dalam pengukur berat beras,air,dan pencuci beras otomatis pada Rice Cooker.
4 BAB II
LANDASAN TEORI
2.1 Rice Cooker
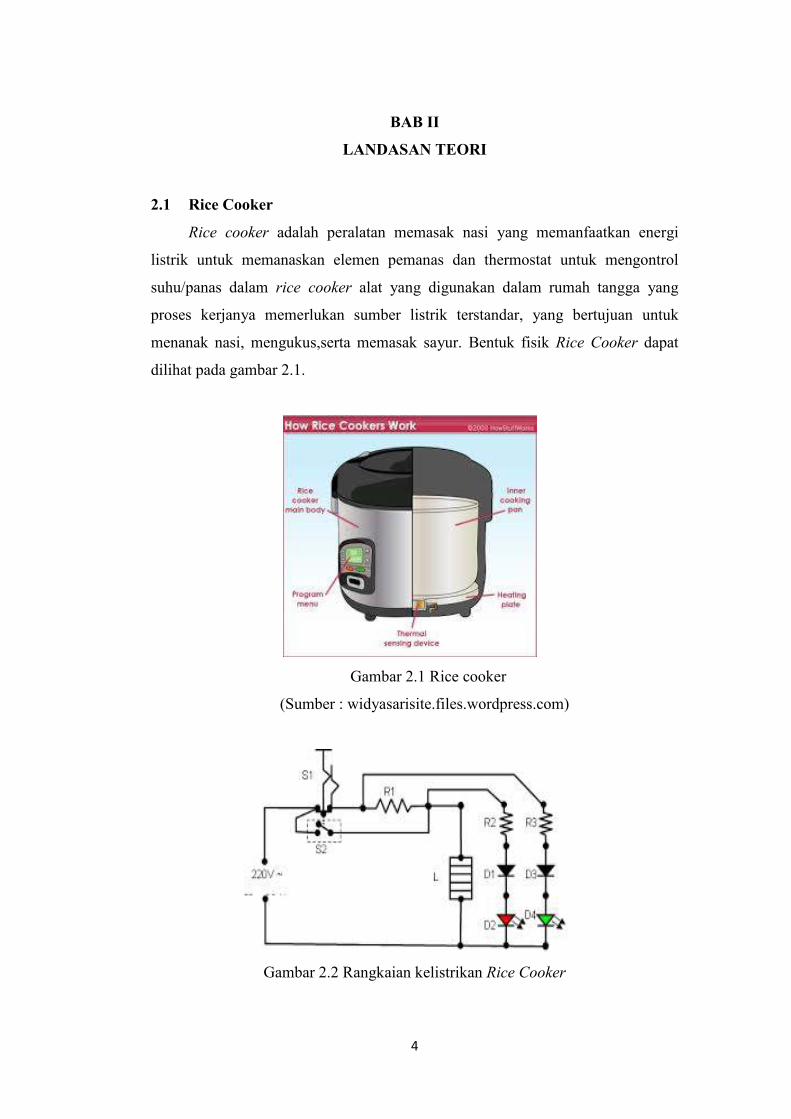
Rice cooker adalah peralatan memasak nasi yang memanfaatkan energi listrik untuk memanaskan elemen pemanas dan thermostat untuk mengontrol suhu/panas dalam rice cooker alat yang digunakan dalam rumah tangga yang proses kerjanya memerlukan sumber listrik terstandar, yang bertujuan untuk menanak nasi, mengukus,serta memasak sayur. Bentuk fisik Rice Cooker dapat dilihat pada gambar 2.1. Gambar 2.1 Rice cooker (Sumber : widyasarisite.files.wordpress.com) Gambar 2.2 Rangkaian kelistrikan Rice Cooker
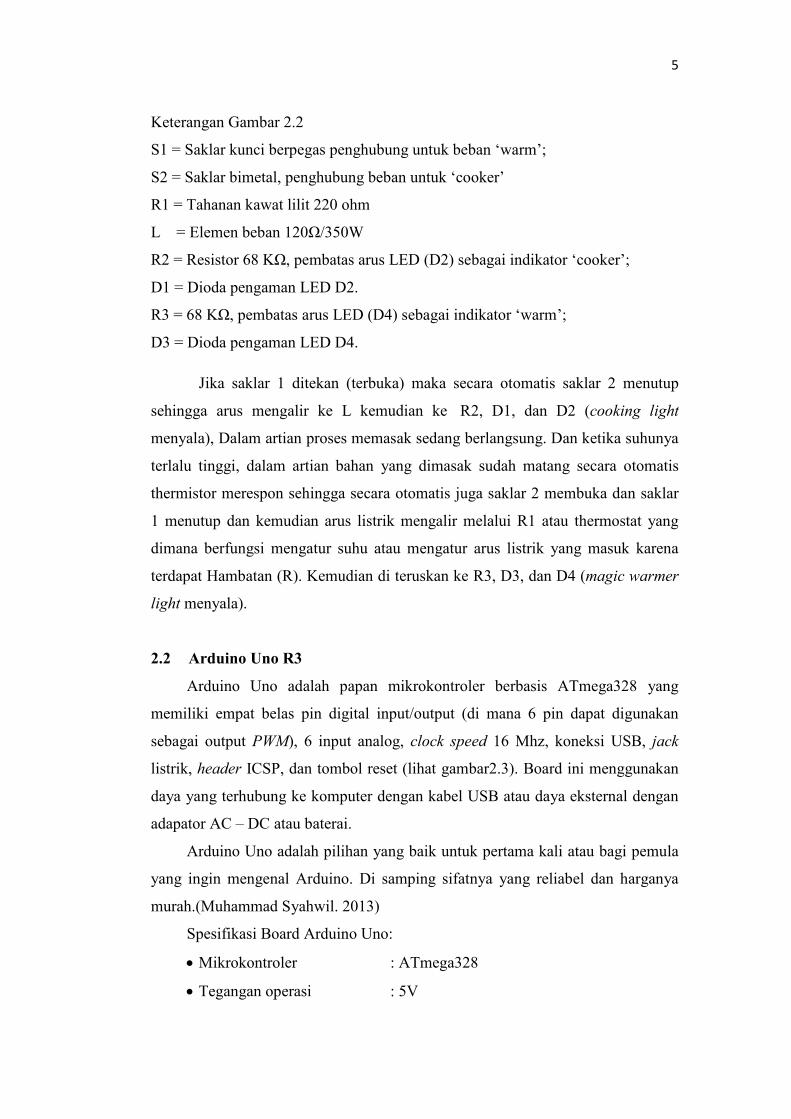
5 Keterangan Gambar 2.2 S1 = Saklar kunci berpegas penghubung untuk beban ‘warm’; S2 = Saklar bimetal, penghubung beban untuk ‘cooker’ R1 = Tahanan kawat lilit 220 ohm L = Elemen beban 120Ω/350W R2 = Resistor 68 KΩ, pembatas arus LED (D2) sebagai indikator ‘cooker’; D1 = Dioda pengaman LED D2. R3 = 68 KΩ, pembatas arus LED (D4) sebagai indikator ‘warm’; D3 = Dioda pengaman LED D4. Jika saklar 1 ditekan (terbuka) maka secara otomatis saklar 2 menutup sehingga arus mengalir ke L kemudian ke R2, D1, dan D2 (cooking light menyala), Dalam artian proses memasak sedang berlangsung. Dan ketika suhunya terlalu tinggi, dalam artian bahan yang dimasak sudah matang secara otomatis thermistor merespon sehingga secara otomatis juga saklar 2 membuka dan saklar 1 menutup dan kemudian arus listrik mengalir melalui R1 atau thermostat yang dimana berfungsi mengatur suhu atau mengatur arus listrik yang masuk karena terdapat Hambatan (R). Kemudian di teruskan ke R3, D3, dan D4 (magic warmer
light menyala). 2.2 Arduino Uno R3 Arduino Uno adalah papan mikrokontroler berbasis ATmega328 yang memiliki empat belas pin digital input/output (di mana 6 pin dapat digunakan sebagai output PWM), 6 input analog, clock speed 16 Mhz, koneksi USB, jack listrik, header ICSP, dan tombol reset (lihat gambar2.3). Board ini menggunakan daya yang terhubung ke komputer dengan kabel USB atau daya eksternal dengan adapator AC – DC atau baterai. Arduino Uno adalah pilihan yang baik untuk pertama kali atau bagi pemula yang ingin mengenal Arduino. Di samping sifatnya yang reliabel dan harganya murah.(Muhammad Syahwil. 2013) Spesifikasi Board Arduino Uno:
• Mikrokontroler : ATmega328 • Tegangan operasi : 5V

6 • Tegangan input (disarankan) : 7-12V • Batas tegangan input : 6-20V • Pin Digital I/O : 14 (di mana 6 pin output PWM) • Pin Analog input : 6 • Arus DC per I/O pin : 40 mA • Arus DC untuk pin 3.3V : 50 mA • Flash Memory : 32 KB (ATmega328), di mana 0.5 KB digunakan oleh bootloader • SRAM : 2 KB (ATmega328) • EEPROM : 1 KB (ATmega328) • Clock : 16 MHz Gambar 2.3. Papan Arduino Uno R3 (Sumber : www.arduino.cc)
2.3 LCD (Liquid Crystal Display) Display elektronik adalah salah satu komponen elektronika yang berfungsi sebagai tampilan suatu data, baik karakter, huruf ataupun grafik. LCD (Liquid
Cristal Display) adalah salah satu jenis display elektronik yang dibuat dengan teknologi CMOS logic yang bekerja dengan tidak menghasilkan cahaya tetapi memantulkan cahaya yang ada di sekelilingnya terhadap front-lit atau mentransmisikan cahaya dari back-lit. LCD (Liquid Cristal Display) berfungsi sebagai penampil data baik dalam bentuk karakter, huruf, angka ataupun grafik. LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektroda transparan indium oksida dalam bentuk tampilan seven-segment

7 dan lapisan elektroda pada kaca belakang. Ketika elektroda diaktifkan dengan medan listrik (tegangan), molekul organik yang panjang dan silindris menyesuaikan diri dengan elektroda dari segmen. Lapisan sandwich memiliki polarizer cahaya vertikal depan dan polarizer cahaya horisontal belakang yang diikuti dengan lapisan reflektor. Cahaya yang dipantulkan tidak dapat melewati molekul-molekul yang telah menyesuaikan diri dan segmen yang diaktifkan terlihat menjadi gelap dan membentuk karakter data yang ingin ditampilkan. Bentuk fisik dari LCD LMB162A dapat dilihat pada gambar 2.4. Gambar 2.4 Bentuk LCD 16x2 (Sumber: www.boarduino.web.id) 2.3.1 Pengendali / Kontroler LCD (Liquid Cristal Display) Dalam modul LCD (Liquid Cristal Display) terdapat microcontroller yang berfungsi sebagai pengendali tampilan karakter LCD (Liquid Cristal
Display). Microntroller pada suatu LCD (Liquid Cristal Display) dilengkapi dengan memori dan register. Memori yang digunakan microcontroler internal LCD adalah : • DDRAM (Display Data Random Access Memory) merupakan memori tempat karakter yang akan ditampilkan berada. • CGRAM (Character Generator Random Access Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana bentuk dari karakter dapat diubah-ubah sesuai dengan keinginan. • CGROM (Character Generator Read Only Memory) merupakan memori untuk menggambarkan pola sebuah karakter dimana pola tersebut merupakan karakter dasar yang sudah ditentukan secara permanen oleh pabrikan pembuat LCD (Liquid Cristal Display)
8 tersebut sehingga pengguna tinggal mangambilnya sesuai alamat memorinya dan tidak dapat merubah karakter dasar yang ada dalam CGROM. Register control yang terdapat dalam suatu LCD diantaranya adalah: • Register perintah yaitu register yang berisi perintah-perintah dari mikrokontroler ke panel LCD (Liquid Cristal Display) pada saat proses penulisan data atau tempat status dari panel LCD (Liquid
Cristal Display) dapat dibaca pada saat pembacaan data. • Register data yaitu register untuk menuliskan atau membaca data dari atau keDDRAM. Penulisan data pada register akan menempatkan data tersebut keDDRAM sesuai dengan alamat yang telah diatur sebelumnya. Pin, kaki atau jalur input dan kontrol dalam suatu LCD (Liquid Cristal
Display) diantaranya adalah : • Pin data adalah jalur untuk memberikan data karakter yang ingin ditampilkan menggunakan LCD (Liquid Cristal Display) dapat dihubungkan dengan bus data dari rangkaian lain seperti mikrokontroler dengan lebar data 8 bit. • Pin RS (Register Select) berfungsi sebagai indikator atau yang menentukan jenis data yang masuk, apakah data atau perintah. Logika low menunjukan yang masuk adalah perintah, sedangkan logika high menunjukan data. • Pin R/W (Read Write) berfungsi sebagai instruksi pada modul jika low tulis data, sedangkan high baca data. • Pin E (Enable) digunakan untuk memegang data baik masuk atau keluar. • Pin VLCD berfungsi mengatur kecerahan tampilan (kontras) dimana pin ini dihubungkan dengan trimpot 5 Kohm, jika tidak digunakan dihubungkan ke ground, sedangkan tegangan catu daya ke LCD sebesar 5 Volt.

9 2.4 Sensor LDR (Light Dependent Resistor) Light Dependent Resistor atau yang biasa disebut LDR adalah jenis resistor yang nilainya berubah seiring intensitas cahaya yang diterima oleh komponen tersebut. Biasa digunakan sebagai detektor cahaya atau pengukur besaran konversi cahaya. Light Dependent Resistor, terdiri dari sebuah cakram semikonduktor yang mempunyai dua buah elektroda pada permukaannya. Pada saat gelap atau cahaya redup, bahan dari cakram tersebut menghasilkan elektron bebas dengan jumlah yang relatif kecil. Sehingga hanya ada sedikit elektron untuk mengangkut muatan elektrik. Artinya pada saat cahaya redup LDR menjadi konduktor yang buruk, atau bisa disebut juga LDR memiliki resistansi yang besar pada saat gelap atau cahaya redup. Simbol dari LDR dapat dilihat pada gambar 2.5. Gambar 2.5 Simbol LDR (Sumber : http://belajarelektronika.net) Pada saat cahaya terang, ada lebih banyak elektron yang lepas dari atom bahan semikonduktor tersebut. Sehingga akan ada lebih banyak elektron untuk mengangkut muatan elektrik. Artinya pada saat cahaya terang LDR menjadi konduktor yang baik, atau bisa disebut juga LDR memiliki resistansi yang kecil pada saat cahaya terang. Dari penjabaran mengenai arti LDR tadi , fungsi LDR adalah sebagai saklar otomatis berdasarkan cahaya. Jika cahaya yang diterima oleh LDR banyak, maka nilai resistansi LDR akan menurun, dan listrik dapat mengalir ON). Sebaliknya, jika cahaya yang diterima LDR sedikit, maka nilai resistansi LDR akan menguat, dan aliran listrik terhambat (OFF).

10 LDR kerap difungsikan sebagai sebuah sensor cahaya dalam berbagai macam rangkaian elektronika seperti lampu penerangan jalan otomatis lampu, lampu kamar tidur otomatis, rangkaian anti maling otomatis menggunakan laser, shutter kamera otomatis, dan masih banyak lagi yang lainya. Bentuk fisik LDR dapat dilihat pada gambar 2.6 di bawah ini. Gambar 2.6 Sensor LDR (Sumber : http://elektroku.com) Pada sisi bagian atas LDR terdapat suatu garis / jalur melengkung yang menyerupai bentuk kurva. Jalur tersebut terbuat dari bahan cadmium sulphida yang sangat sensitiv terhadap pengaruh dari cahaya. Jalur cadmium sulphida dibuat melengkung menyerupai kurva agar jalur tersebut dapat dibuat panjang dalam ruang (area) yang sempit. Cadmium sulphida (CdS) merupakan bahan semi-konduktor yang memiliki gap energi antara elektron konduksi dan elektron valensi. Ketika cahaya mengenai cadmium sulphida, maka energi proton dari cahaya akan diserap sehingga terjadi perpindahan dari band valensi ke band konduksi. Akibat perpindahan elektron tersebut mengakibatkan hambatan dari cadmium sulphida berkurang dengan hubungan kebalikan dari intensitas cahaya yang mengenai LDR. 2.5 LED (Light Emitting Diode) Light Emitting Diode atau sering disingkat dengan LED adalah komponen elektronika yang dapat memancarkan cahaya monokromatik ketika diberikan tegangan maju. LED merupakan keluarga Dioda yang terbuat dari bahan semikonduktor. Warna-warna Cahaya yang dipancarkan oleh LED tergantung

11 pada jenis bahan semikonduktor yang dipergunakannya. LED juga dapat memancarkan sinar inframerah yang tidak tampak oleh mata seperti yang sering kita jumpai pada Remote Control TV ataupun Remote Control perangkat elektronik lainnya. Bentuk LED mirip dengan sebuah bohlam (bola lampu) yang kecil dan dapat dipasangkan dengan mudah ke dalam berbagai perangkat elektronika. Berbeda dengan Lampu Pijar, LED tidak memerlukan pembakaran filamen sehingga tidak menimbulkan panas dalam menghasilkan cahaya. Oleh karena itu, saat ini LED (Light Emitting Diode) yang bentuknya kecil telah banyak digunakan sebagai lampu penerang dalam LCD TV yang mengganti lampu tube. Bentuk fisik dan simbol LED dapat dilihat pada gambar 2.7. Gambar 2.7 Bentuk dan simbol LED (Sumber : http://teknikelektronika.com) Seperti dikatakan sebelumnya, LED merupakan keluarga dari Dioda yang terbuat dari Semikonduktor. Cara kerjanya pun hampir sama dengan Dioda yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda. Cara kerja Led dapat dilihat pada gambar 2.8. Gambar 2.8 Cara kerja LED (Sumber : http://teknikelektronika.com)
12 LED terdiri dari sebuah chip semikonduktor yang di doping sehingga menciptakan junction P dan N. Yang dimaksud dengan proses doping dalam semikonduktor adalah proses untuk menambahkan ketidakmurnian (impurity) pada semikonduktor yang murni sehingga menghasilkan karakteristik kelistrikan yang diinginkan. Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna). LED atau Light Emitting Diode yang memancarkan cahaya ketika dialiri tegangan maju ini juga dapat digolongkan sebagai Transduser yang dapat mengubah Energi Listrik menjadi Energi Cahaya. 2.6 Motor DC Energi mekanik ini digunakan untuk, misalnya memutar impeller pompa, fan atau blower, menggerakan kompresor, mengangkat bahan,dll. Motor listrik digunakan juga di rumah (mixer, bor listrik, fan angin) dan di industri. Motor listrik kadangkala disebut “kuda kerja” nya industri sebab diperkirakan bahwa motor-motor menggunakan sekitar 70% beban listrik total di industri. Motor DC memerlukan suplai tegangan yang searah pada kumparan medan untuk diubah menjadi energi mekanik. Kumparan medan pada motor dc disebut stator (bagian yang tidak berputar) dan kumparan jangkar disebut rotor (bagian yang berputar). Jika terjadi putaran pada kumparan jangkar dalam pada medan magnet, maka akan timbul tegangan (GGL) yang berubah-ubah arah pada setiap setengah putaran, sehingga merupakan tegangan bolak-balik (lihat gambar 2.6). Prinsip kerja dari arus searah adalah membalik phasa tegangan dari gelombang yang mempunyai nilai positif dengan menggunakan komutator, dengan demikian arus yang berbalik arah dengan kumparan jangkar yang berputar dalam medan magnet. Bentuk motor paling sederhana memiliki kumparan satu lilitan yang bisa berputar bebas di antara kutub-kutub magnet permanen. Komponen penyusun motor DC dapat dilihat pada gambar 2.9.

13 Gambar 2.9 Komponen Motor DC Catu tegangan dc dari baterai menuju ke lilitan melalui sikat yang menyentuh komutator, dua segmen yang terhubung dengan dua ujung lilitan. Kumparan satu lilitan pada gambar di atas disebut angker dinamo. Angker dinamo adalah sebutan untuk komponen yang berputar di antara medan magnet. Bentuk fisik motor DC dapat dilihat pada gambar 2.10. Gambar 2.10 Motor DC 2.7 Motor Servo Motor servo adalah sebuah motor DC dengan sistem umpan balik tertutup di mana posisi rotor-nya akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor servo. Keunggulan dari penggunaan motor servo adalah :
• Tidak bergetar dan tidak ber-resonansi saat beroperasi. • Daya yang dihasilkan sebanding dengan ukuran dan berat motor. • Penggunaan arus listik sebanding dengan beban yang diberikan.

14 • Resolusi dan akurasi dapat diubah dengan hanya mengganti encoder yang dipakai. • Tidak berisik saat beroperasi dengan kecepatan tinggi. Komponen Penyusun Motor Servo Motor servo pada dasarnya dibuat menggunakan motor DC (gambar 2.8) yang dilengkapi dengan controler dan sensor posisi sehingga dapat memiliki gerakan 0o, 90o, 180o atau 360o. Berikut adalah komponen internal sebuah motor servo 180o. Gambar 2.11 Komponen Penyusun Motor Servo Tiap komponen pada motor servo diatas masing-masing memiliki fungsi sebagai controler, driver, sensor, girbox dan aktuator. Pada gambar diatas terlihat beberapa bagian komponen motor servo. Motor pada sebuah motor servo adalah motor DC yang dikendalikan oleh bagian controler, kemudian komponen yang berfungsi sebagai sensor adalah potensiometer yang terhubung pada sistem girbox pada motor servo. Bentuk fisik motor servo dapat dilihat pada gambar 2.10. Gambar 2.12 Motor Servo

15 2.8 Solenoid Valve Solenoid valve merupakan katup yang dikendalikan dengan arus listrik baik AC maupun DC melalui kumparan / selenoida. Solenoid valve ini merupakan elemen kontrol yang paling sering digunakan dalam sistem fluida. Seperti pada sistem pneumatik, sistem hidrolik ataupun pada sistem kontrol mesin yang membutuhkan elemen kontrol otomatis. Contohnya pada sistem pneumatik, solenoid valve bertugas untuk mengontrol saluran udara yang bertekanan menuju aktuator pneumatik(cylinder). Atau pada sebuah tandon air yang membutuhkan solenoid valve sebagai pengatur pengisian air, sehingga tandon tersebut tidak sampai kosong. Bentuk fisik dari solenoid valve tertera pada gambar 2.13. Gambar 2.13 Solenoid Valve (sumber : dokumen pribadi) Banyak sekali jenis-jenis dari solenoid valve, karena solenoid valve ini di desain sesuai dari kegunaannya. Mulai dari 2 saluran, 3 saluran, 4 saluran dan sebagainya. Contohnya pada solenoid valve 2 saluran atau yang sering disebut katup kontrol arah 2/2. Memiliki 2 jenis menurut cara kerjanya, yaitu NC dan NO. Jadi fungsinya hanya menutup / membuka saluran karena hanya memiliki 1 lubang inlet dan 1 lubang outlet. Atau pada solenoid 3 saluran yang memiliki 1 lubang inlet , 1 lubang outlet ,dan 1 exhaust/pembuangan. Dimana lubang inlet berfungsi sebagai masuknya fluida, lubang outlet berfungsi sebagai keluarnya fluida dan exhaust berfungsi sebagai pembuangan fluida/cairan yang terjebak. Dan selenoid 3 saluran ini biasanya digunakan atau diterapkan pada aktuator pneumatik( cylinder kerja tunggal). Pada gambar 2.14 dijelaskan tentang prinsip kerja dari solenoid valve.

16 Gambar 2.14 Prinsip kerja Solenoid valve Solenoid valve akan bekerja bila kumparan/coil mendapatkan tegangan arus listrik yang sesuai dengan tegangan kerja (kebanyakan tegangan kerja solenoid valve adalah 100/200VAC dan kebanyakan tegangan kerja pada tegangan DC adalah 12/24VDC). Sebuah pin akan tertarik karena gaya magnet yang dihasilkan dari kumparan selenoida tersebut. Dan saat pin tersebut ditarik naik maka fluida akan mengalir dari ruang C menuju ke bagian D dengan cepat. Sehingga tekanan di ruang C turun dan tekanan fluida yang masuk mengangkat diafragma. Sehingga katup utama terbuka dan fluida mengalir langsung dari A ke F.
17 BAB III
PERANCANGAN
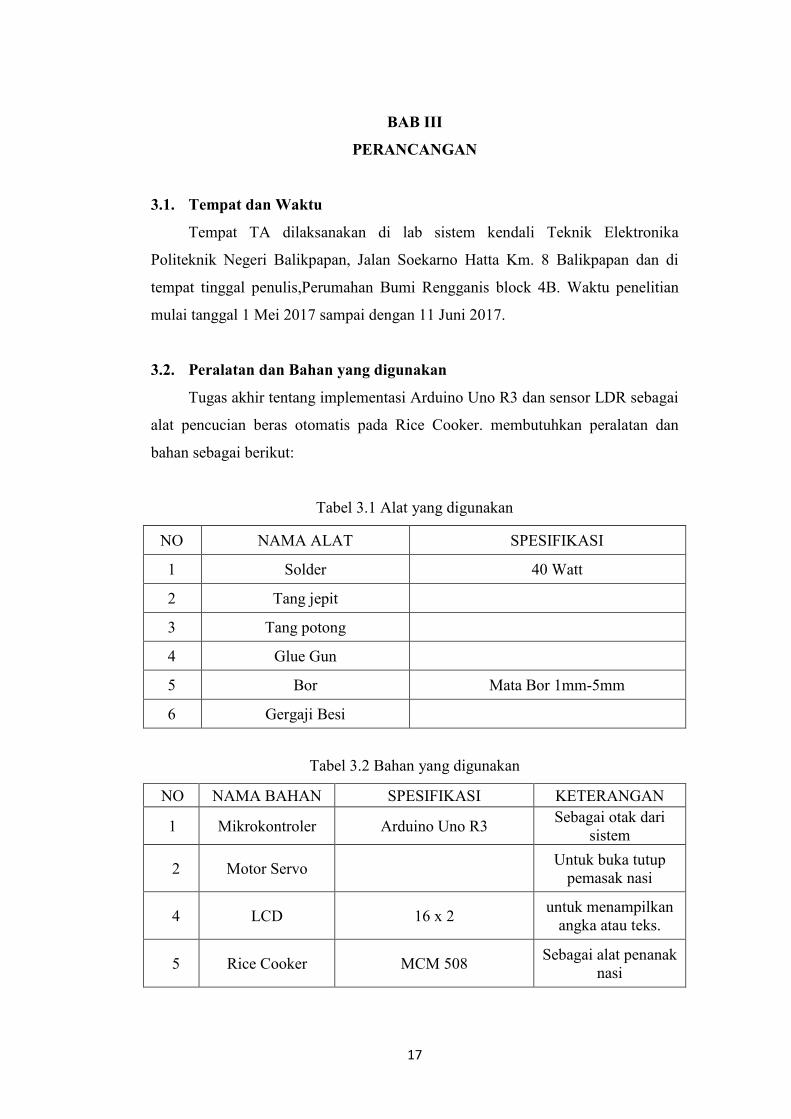
3.1. Tempat dan Waktu Tempat TA dilaksanakan di lab sistem kendali Teknik Elektronika Politeknik Negeri Balikpapan, Jalan Soekarno Hatta Km. 8 Balikpapan dan di tempat tinggal penulis,Perumahan Bumi Rengganis block 4B. Waktu penelitian mulai tanggal 1 Mei 2017 sampai dengan 11 Juni 2017. 3.2. Peralatan dan Bahan yang digunakan Tugas akhir tentang implementasi Arduino Uno R3 dan sensor LDR sebagai alat pencucian beras otomatis pada Rice Cooker. membutuhkan peralatan dan bahan sebagai berikut: Tabel 3.1 Alat yang digunakan NO NAMA ALAT SPESIFIKASI 1 Solder 40 Watt 2 Tang jepit 3 Tang potong 4 Glue Gun 5 Bor Mata Bor 1mm-5mm 6 Gergaji Besi Tabel 3.2 Bahan yang digunakan NO NAMA BAHAN SPESIFIKASI KETERANGAN 1 Mikrokontroler Arduino Uno R3 Sebagai otak dari sistem 2 Motor Servo Untuk buka tutup pemasak nasi 4 LCD 16 x 2 untuk menampilkan angka atau teks. 5 Rice Cooker MCM 508 Sebagai alat penanak nasi

18 6 Power Supply 12V 2 Amp Sebagai Catu Daya 7 Motor DC Sebagai penggerak pencuci beras 8 Sensor LDR Sebagai indikasi kebersihan beras 3.3. Proses Perencanaan alat Proses perencanaan alat dimulai dari pembuatan program yang akan di-upload ke arduino. Setelah program dibuat kemudian di upload ke arduino dan mulai perakitan setiap modul. Setelah semua modul terakit kemudian lakukan proses percobaan/pengujian pada masing-masing modul apakah sesuai dengan yang telah diprogram. Jika sudah sesuai maka pembuatan alat telah selesai. Di bawah ini diagram alir proses perancangan alat dapat dilihat pada gambar 3.1. Gambar 3.1 Diagram Alir Proses Perencanaan

19 3.4. Perencanaan Sistem Berikut adalah implementasi mengenai alat pemasak nasi otomatis secara keseluruhan di tunjukkan pada gambar 3.2. Gambar 3.2 Blok Diagram alat pemasak nasi otomatis Pada blok diagram alat pemasak nasi otomatis (gambar 3.2) Pada bagian A input dari sistem yaitu berupa load Cell untuk mengukur jumlah berat beras yang akan di masak, Kemudian input ini akan diproses oleh mikrokontroler yaitu papan Arduino Uno R3 yang selanjutnya mengendalikan output berupa tampilan dari LCD, Proses alat bekerja yaitu saat pertama dihidupkan arduino akan melakukan inisialisasi port yang akan digunakan sesuai dengan yang telah diprogram, kemudian melakukan proses pembacaan nilai berat beras (Load Cell) dan menampilkannya di LCD. Kemudian arduino akan memproses nilai tersebut untuk selanjutnya mengendalikan motor DC 1 sehingga kemudian motor DC 1 akan berputar dan menjalankan proses pembukaan saluran beras setelah berat beras di

20 timbang untuk di teruskan ke tempat pencucian dan solenoid valve akan mengatur jumlah debit air yang di perlukan untuk mencuci beras dan memasak beras berdasarkan jumlah beras yang akan di masak pada alat Pemasak nasi.[4] Pada bagian B, input dari sistem yaitu berupa sensor LDR. Power supply sebagai sumber daya sistem, LCD dan motor DC sebagai output serta Mikrokontroler Arduino Uno guna mengontrol sistem kerja alat – alat yang digunakan.(Gambar 3.3) Gambar 3.3 Diagram blok bagan B (sistem kontrol alat pemasak nasi otomatis) Pada blok diagram bagian B proses alat bekerja yaitu saat pertama dihidupkan arduino akan melakukan inisialisasi port yang akan digunakan sesuai dengan yang telah diprogram, setelah beras masuk pada ruang pencucian, maka motor DC akan memutar alat pencuci beras dan melakukan proses pencucian selama 1 menit. Setelah proses pencucian beras selesai, air bekas cucian beras akan dibuang melewati sensor LDR. Sensor LDR akan membaca tingkat kekeruhan air beras, proses pencuciaan beras akan berakhir jika pembacaan sensor LDR menyatakan air sudah bersih. Setelah proses pencucian beras selesai maka motor DC 3 akan membuka saluran beras dari tempat pencucian ke tempat memasak nasi, kemudian tutup dari pemasak nasi akan terbuka dan tertutup secara otomatis dengan menggunakan motor servo. Adapun diagram alir sistem pencuci beras otomatis menggunakan sensor photodioda pada alat pemasak nasi dapat dilihat pada gambar 3.4.

21 Gambar 3.4 Diagram Alir Cara Kerja Alat Pada diagram alir diatas yang ditandai dengan garis biru dapat diuraikan secara lebih detail, langkah awal cara kerja alat yaitu pada saat saluran pengukuran beras tebuka dan beras memasuki ruang pencucian, maka arduino akan memberikan sinyal pada motor DC pencuci beras untuk memulai proses pencucian beras selama 30 detik. Setelah proses pencucian beras selesai, air limbah pencucian beras akan dibuang dengan mengaktifkan solenoid valve selama 1 menit, kemudian air limbah melewati sensor LDR yang akan melakukan pembacaan pada air beras. Pembacaan pada sensor LDR didasarkan pada nilai output dari sensor LDR, dan tingkat kekeruhan air dikonversi ke dalam besaran hambatan atau resistance. Selanjutnya mikrokontroller akan mulai melakukan analisa terhadap nilai pembacaan sensor LDR serta menentukan hasil pembacaan sensor LDR, dimana batas hambatan untuk air jernih adalah kurang dari 65 Ohm. Setelah beras telah tercuci bersih, maka mikrokontroller akan mengirimkan sinyal pada motor servo untuk membuka tutup wadah pemasak nasi dan memberikan signal pada motor DC untuk membuka katup saluran pada ruang
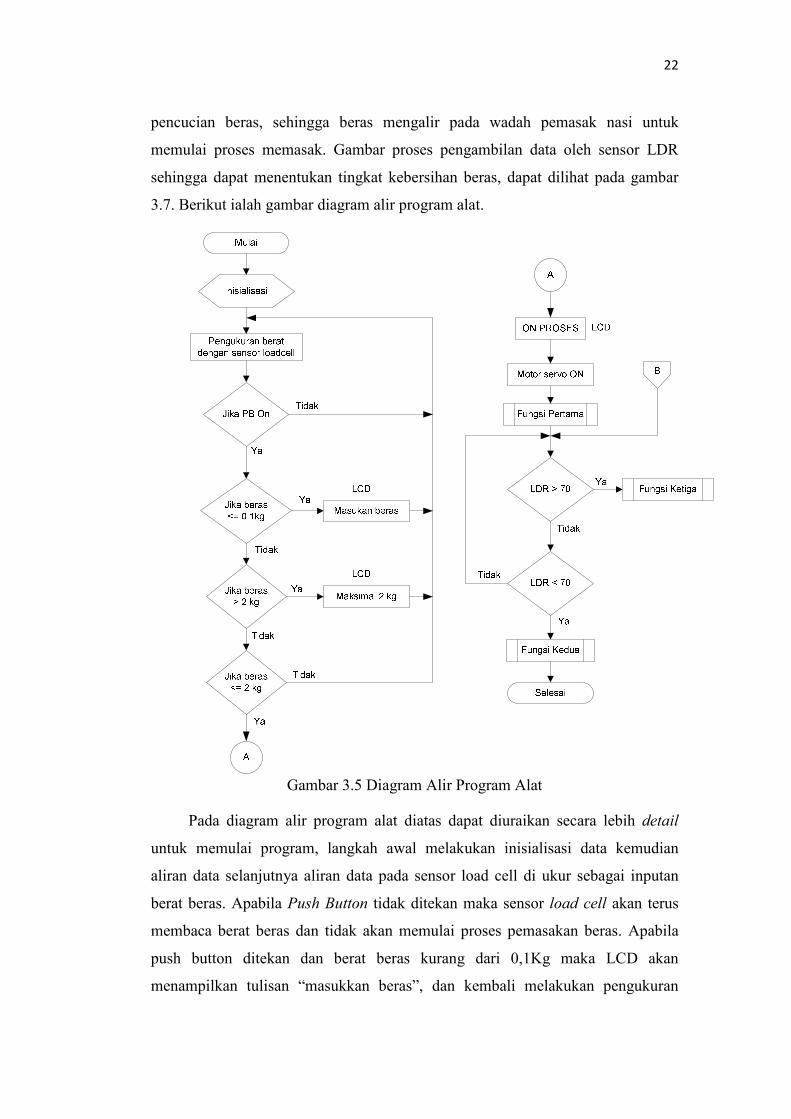
22 pencucian beras, sehingga beras mengalir pada wadah pemasak nasi untuk memulai proses memasak. Gambar proses pengambilan data oleh sensor LDR sehingga dapat menentukan tingkat kebersihan beras, dapat dilihat pada gambar 3.7. Berikut ialah gambar diagram alir program alat. Gambar 3.5 Diagram Alir Program Alat Pada diagram alir program alat diatas dapat diuraikan secara lebih detail untuk memulai program, langkah awal melakukan inisialisasi data kemudian aliran data selanjutnya aliran data pada sensor load cell di ukur sebagai inputan berat beras. Apabila Push Button tidak ditekan maka sensor load cell akan terus membaca berat beras dan tidak akan memulai proses pemasakan beras. Apabila push button ditekan dan berat beras kurang dari 0,1Kg maka LCD akan menampilkan tulisan “masukkan beras”, dan kembali melakukan pengukuran

23 beras. Jika berat beras lebih dari 2Kg maka LCD akan menampilkan tulisan “Maksimal 2Kg”, dan load cell akan kembali melakukan pengukuran berat beras. Dan jika berat beras diantara 0,1Kg – 2K maka program akan memulai proses pencucian beras dengan mengaktifkan motor servo untuk membuka saluran penimbangan beras menuju ke wadah pencuciandan LCD akan menampilkan tulisan “ON PROSES”, kemudian program akan memanggil fungsi pertama. Setelah fungsi pertama di jalankan maka program akan mengaktifkan sensor LDR, dan sensor akan membaca air hasil pencucian beras, yaitu jika pembacaan sensor lebih dari 70 Ohm, maka program akan menjalankan fungsi ketiga. Dan jika pembacaan sensor LDR kuran dari 70 Ohm, maka program akan mejalankan fungsi kedua, jika fungsi kedua telah dijalankan maka program telah selesai dan berarti beras telah tercuci bersih serta proses memasak nasi telah selesai. Untuk proses pemanggilan fungsi – fungsi tertera pada gambar 3.6. Gambar 3.6 Proses fungsi – fungsi

24 Pada fungsi pertama LCD akan menampilkan nilai “c”, dimana nilai c didapat dari a dikali dengan 150 detik, dan nilai “a” ialah hasil pembacaan berat beras (Kg). Nilai c digunakan untuk mengatur jumlah air pada proses pencucian dan proses memasak nasi. Setelah nilai c didapatkan maka pompa pertama akan ON selama delay c untuk proses pencucian beras dan pompa pertama akan off. Setelah itu motor akan melakukan pencucian selama 30 detik dan solenoid ON selama 60 detik. Setelah itu LED akan ON untuk memulai proses pembacaan sensor LDR dan solenoid akan off. Pada fungsi kedua pompa akan aktif untuk memulai pengisian air pada proses pemasakan dan motor2 akan aktif unntuk membuka penutup wadah pemasak nasi. Setelah wadah terbuka motor servo akan aktif untuk membuka katup wadah pencucian beras, agar beras mengalir pada wadah pemasak. Setelah itu wadah pemasak nasi akan tertutup kembali lalu servo1 akan aktif untuk menekan tuas untuk memasak nasi pada rice cooker. Pada fungsi ketiga prosesnya sama seperti fungsi pertama, hal ini digunakan untuk proses pencucian kembali jika pembacaan LDR lebih dari 70 Ohm. Gambar 3.7 Diagram alir pengambilan data.

25 Pada gambar diatas dapat di lihat proses pengambilan data tingkat kekeruhan air pencucian beras oleh sensor LDR, untuk mengetahui nilai Rmaks kita harus melakukan sebuah pengujian pada air beras hingga mengetahui berapa Ohm air beras yang telah dicuci hingga bersih. Setelah mendapat nilai Rmaks kita dapat membandingkan nilai Rmaks dengan Rsam, Rsam ialah nilai Ohm dari air beras yang dicuci menggunakan alat pencuci beras otomatis. Jika nilai Rsam lebih kecil atau samadengan nilai Rmaks maka hasil pencucian beras dapat dinyatakan bersih.

26 BAB IV
HASIL DAN PEMBAHASAN Dalam menganalisa rancangan implementasi Sensor LDR pada Alat Pemasak Nasi Otomatis dilakukan dengan menguji dari tiap-tiap bagian rangkaian untuk mendapatkan hasil apakah alat yang telah dirancang sesuai dengan yang diharapkan. Pengujian alat dilakukan untuk memastikan bahwa alat yang telah dibuat dapat berfungsi dengan baik dan dapat digunakan. 4.1 Pengujian Motor Servo Pengujian dilakukan dengan menggunakkan sebuah mikrokontroller yaitu Arduino, dimana hasil akan dilihat langsung dari pergerakan motor servo. Dalam pengujian ini akan dibuat program sederhana untuk melihat pergerakan sudut motor servo yang akan disesuaikan dengan program yang dibuat dan pengukuran menggunakan alat ukur. Langakh-langkah dalam melakukan pengujian rangkaian motor servo sebagai pembuka dan penutup lauran pencucian beras, sebagai berikut: 1. Kabel motor servo terdiri dari 3 warna yaitu ; orange, merah, dan cokelat. ketiga kabel tersebut di hubungkan pada arduino Gambar kabel pada motor servo dapat dilihat pada gambar 4.1 berikut ; Tabel 4.1 Rangkaian motor servo dengan arrduino Kaki servo Arduino Uno Merah Vcc 5 V Orange Pin 7 Cokelat Gnd Servo bekerja ketika berat beras terdeteksi dengan load cell akan menutup katup ruang pencucian sampai beras yang dicuci menjadi bersih dan akan membuka katup saluran pencucian beras, sehingga beras yang telah dicuci akan mengalir pada ruang pemasak nasi. Adapun kondisi awal saat tertutup berada pada sudut 25˚ dan akan membuka 90˚.

27 Adapun gambar saat pengujian motor servo dapat dilihat pada gambar 4.1. Gambar 4.1 Pengujian Motor Servo Hasil pengujian dari motor servo dapat dilihat pada tabel 4.2. Tabel 4.2 Hasil Uji Motor Servo Pengujian Pengaturan Sudut Pada Program (derajat) Pengaturan Sudut Pada Motor Servo (derajat) Pengukuran Dengan Busur (derajat) 1 0 0 0 2 30 30 30 3 45 45 45 4 90 90 90 5 180 180 180 Dilihat daari hasil pengujian motor servo pada tabel 4.1, nilai pergerakan sudut yang dihasilkan pada motor servo sesuai dengan program dan pengukuran menggunakan alat ukur. Sehingga dapat disimpulkan kondisi motor servo dalam keadaan baik. 4.2 Pengujian Rangkaian Regulator Langkah-langkah dalam melakukan pengujian rangkaian regulator sebagai power supply multiple output sebagai berikut. 1. Ukur regulator output dengan menggunakan DMM (Digital Multimeter).

28 2. Kalibrasi dan atur DMM pada skala DCV. 3. Ukur setiap output yang digunakan 5 VDC dan 12 VDC, lihat tegangan yang dihasilkan pada DMM. Tabel 4.3 Hasil Pengujian Tegangan Output pada power supply Parameter Output Tegangan Output Persen Error 5 VDC 5VDC 0 % 12 VDC 12,66 VDC 1 % Pada data diatas dapat di lihat bahwa nilai keluaran dari regulator telah sesuai dengan nilai yang diinginkan. Nilai keluaran dari regulator bernilai 5 VDC, sesuai dengan kebutuhandari komponen yang digunakan.
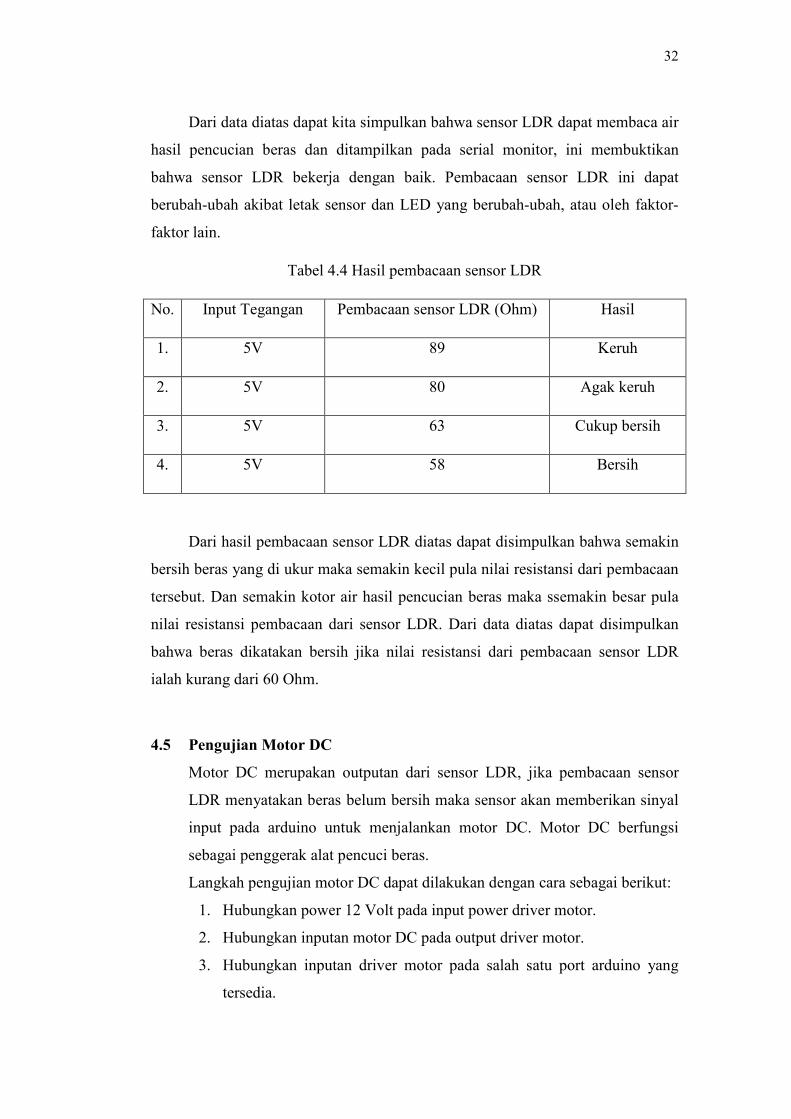
4.3 Pengujian Tampilan LCD Dalam alat ini menggunakan LCD2x16 karakter ini berfungsi sebagai media informasi untuk menampilkan hasil pengukuran dari setiap sensor dan tampilan lainya yang dituliskan di dalam listing program pada arduino. Dengan menggunakan LCD2x16 ini dapat menampilkan 2 baris informasi sebanyak 16 karakter huruf maupun angka. Tampilan LCD ini merupakan ukuran normal yang biasa digunakan untuk menampilkan informasi yang tidak terlalu banyak karakter yang akan di tampilkan. Sebelumnya hubungkan dulu modul I2C pada LCD, hal ini berguna untuk menghemat port yang digunakan pada arduino. Langkah pengujian: 1. Menggunakan ouput power supply 5 volt 2. Hubungkan tegangan 5 volt pada modul I2C LCD. 3. Hubungkan pin SDA dan SCL modul I2C LCD pada pin SDA dan SCL Arduino uno R3. 4. Saklar dalam keadaan On. 5. Buatlah listing program yang tertera pada gambar 4.2 pada arduino uno R3.
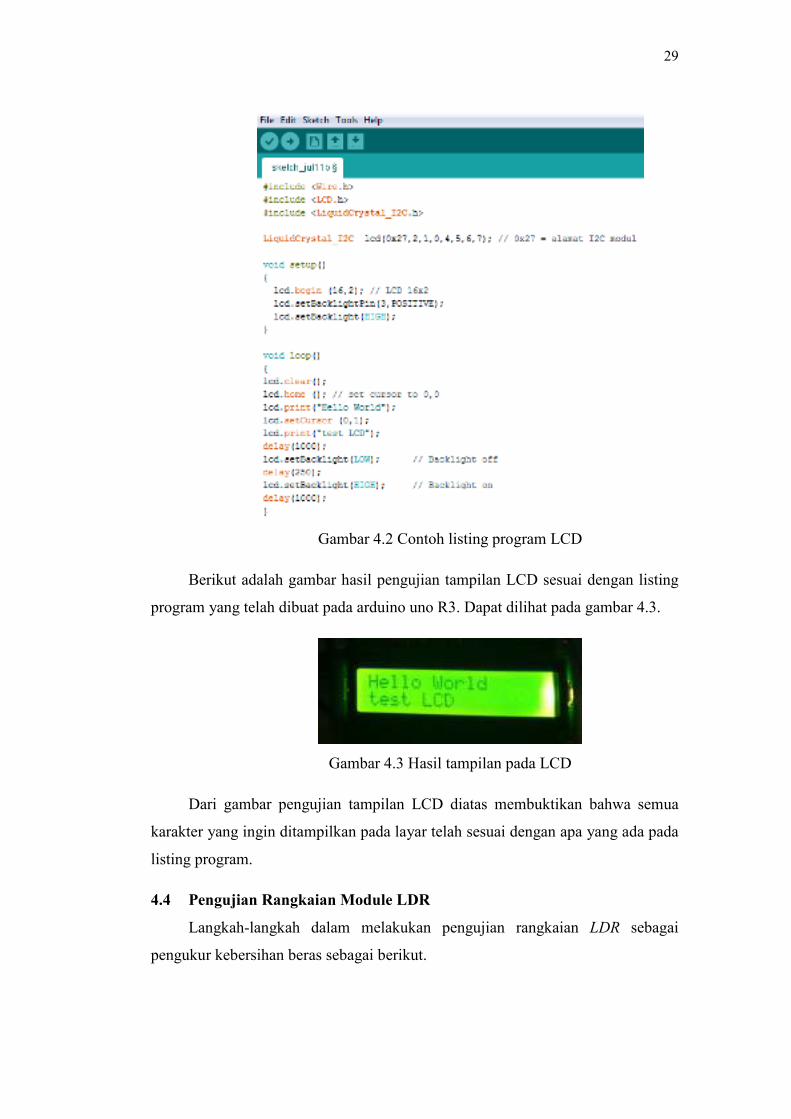
29 Gambar 4.2 Contoh listing program LCD Berikut adalah gambar hasil pengujian tampilan LCD sesuai dengan listing program yang telah dibuat pada arduino uno R3. Dapat dilihat pada gambar 4.3. Gambar 4.3 Hasil tampilan pada LCD Dari gambar pengujian tampilan LCD diatas membuktikan bahwa semua karakter yang ingin ditampilkan pada layar telah sesuai dengan apa yang ada pada listing program. 4.4 Pengujian Rangkaian Module LDR Langkah-langkah dalam melakukan pengujian rangkaian LDR sebagai pengukur kebersihan beras sebagai berikut.

30 1. Modul LDR yang digunakan memiliki 4 buah pin yaitu VCC, GND, D0, dan A0. Pin Vcc dan Gnd sebagai inputan power Modul LDR, sedangkan D0 dan A0 sebagai output digital atau output analog. Bentuk fisik modul LDR dapat dilihat pada gambar 4.2. Gambar 4.4 Module LDR
2. Menghubungkan sensor dengan power supplay 5 Volt sebagai sumber tegangan sensor. 3. Hubungkan pin A0 sensor pada A0 arduino sebagai data analog. 4. Menggunakan LED sebagai inputan cahaya pada modul LDR. 5. Hubungkan salah satu kaki LED ke power dan lainnya ke port arduino untuk mengatur lama waktu LED bekerja. 6. Buka program sketch arduino, Lakukan pemogramman. Upload program ke arduino. 7. Tekan Ctrl+Shift+M maka tampilan serial monitor akan tampil. 8. Ukurlah air hasil pencucian beras menggunakan selang sebagai media antara sensor LDR dengan LED. Pengukuran air hasil pencucian beras dapat dilihat pada gambar 4.5, percobaan ini dilakukan sampai beras benar-benar bersih, gambar air hasil pencucian beras dapat dilihat pada gambar 4.6. Hasil pembacaan sensor LDR terhadap air hasil pencucian beras dapat dilihat pada serial monitor arduino. Gambar pembacaan sensor LDR pada serial monitor dapat dilihat pada gambar 4.7.

31 Gambar 4.5 Pengukuran air hasil pencucian beras Gambar 4.6 Air hasil pencucian beras Dalam gambar 4.6 dapat dilihat dari sisi kanan ialah air hasil pencucian beras pertama, disebelahnya ialah hasil pencucian beras kedua, sementara posisi kedua dari sisi kiri ialah hasil pencucian ketiga, dan posisi paling kiri ialah hasil pencucian beras ke-empat. Gambar 4.7 hasil pembacaan sensor LDR pada serial monitor
32 Dari data diatas dapat kita simpulkan bahwa sensor LDR dapat membaca air hasil pencucian beras dan ditampilkan pada serial monitor, ini membuktikan bahwa sensor LDR bekerja dengan baik. Pembacaan sensor LDR ini dapat berubah-ubah akibat letak sensor dan LED yang berubah-ubah, atau oleh faktor-faktor lain. Tabel 4.4 Hasil pembacaan sensor LDR No. Input Tegangan Pembacaan sensor LDR (Ohm) Hasil 1. 5V 89 Keruh 2. 5V 80 Agak keruh 3. 5V 63 Cukup bersih 4. 5V 58 Bersih Dari hasil pembacaan sensor LDR diatas dapat disimpulkan bahwa semakin bersih beras yang di ukur maka semakin kecil pula nilai resistansi dari pembacaan tersebut. Dan semakin kotor air hasil pencucian beras maka ssemakin besar pula nilai resistansi pembacaan dari sensor LDR. Dari data diatas dapat disimpulkan bahwa beras dikatakan bersih jika nilai resistansi dari pembacaan sensor LDR ialah kurang dari 60 Ohm. 4.5 Pengujian Motor DC Motor DC merupakan outputan dari sensor LDR, jika pembacaan sensor LDR menyatakan beras belum bersih maka sensor akan memberikan sinyal input pada arduino untuk menjalankan motor DC. Motor DC berfungsi sebagai penggerak alat pencuci beras. Langkah pengujian motor DC dapat dilakukan dengan cara sebagai berikut: 1. Hubungkan power 12 Volt pada input power driver motor. 2. Hubungkan inputan motor DC pada output driver motor. 3. Hubungkan inputan driver motor pada salah satu port arduino yang tersedia.
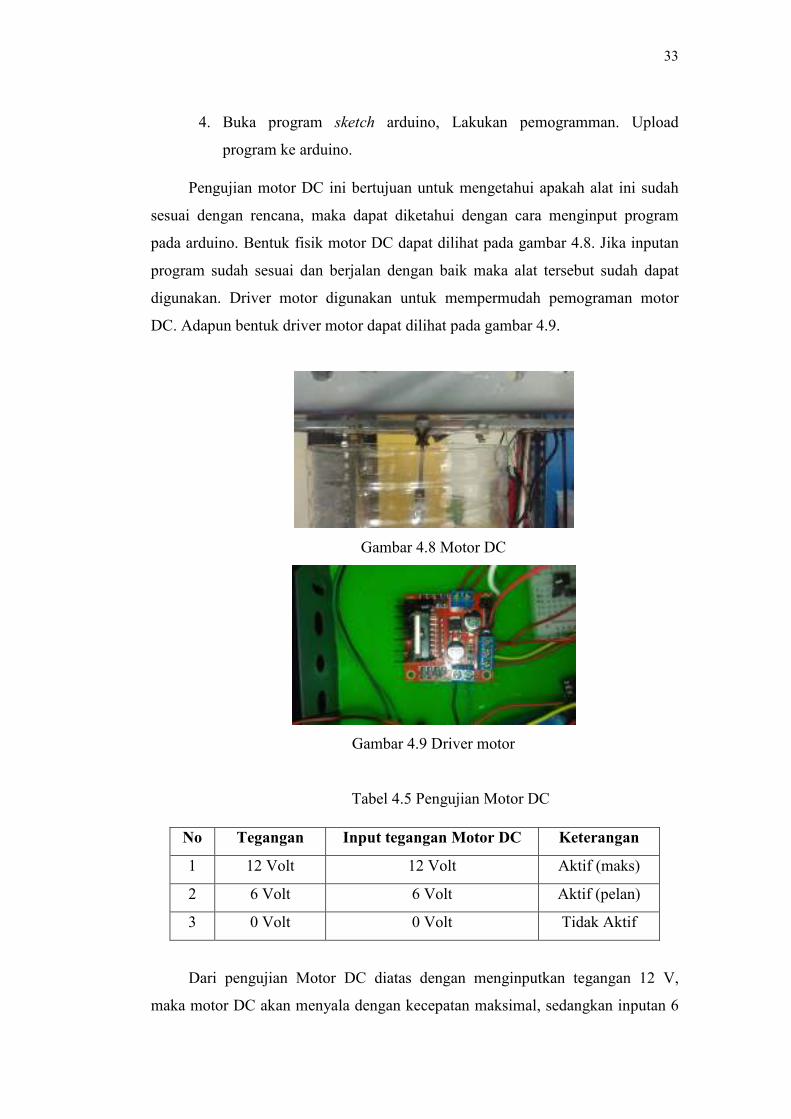
33 4. Buka program sketch arduino, Lakukan pemogramman. Upload program ke arduino. Pengujian motor DC ini bertujuan untuk mengetahui apakah alat ini sudah sesuai dengan rencana, maka dapat diketahui dengan cara menginput program pada arduino. Bentuk fisik motor DC dapat dilihat pada gambar 4.8. Jika inputan program sudah sesuai dan berjalan dengan baik maka alat tersebut sudah dapat digunakan. Driver motor digunakan untuk mempermudah pemograman motor DC. Adapun bentuk driver motor dapat dilihat pada gambar 4.9. Gambar 4.8 Motor DC Gambar 4.9 Driver motor Tabel 4.5 Pengujian Motor DC No Tegangan Input tegangan Motor DC Keterangan 1 12 Volt 12 Volt Aktif (maks) 2 6 Volt 6 Volt Aktif (pelan) 3 0 Volt 0 Volt Tidak Aktif Dari pengujian Motor DC diatas dengan menginputkan tegangan 12 V, maka motor DC akan menyala dengan kecepatan maksimal, sedangkan inputan 6

34 V motor DC akan menyala dengan kecepatan pelan dan dengan inputan 0 V maka motor DC tidak aktif. Dari pengujian ini dapat disimpulkan bahwa motor DC bekerja dengan baik dan siap digunakan. 4.6 Pengujian Solenoid Valve Solenoid Valve merupakan outputan dari sensor LDR, jika pembacaan sensor LDR telah selesai melakukan pembacaan air hasil pencucian beras maka sensor akan memberikan sinyal input pada arduino untuk menjalankan solenoid valve. Solenoid valve berfungsi sebagai katup pada alat pencuci beras untuk membuang air hasil pencucian beras. Dalam menjalankan solenoid digunakan relay untuk on off-kan solenoid valve. Langkah pengujian motor DC dapat dilakukan dengan cara sebagai berikut: 1. Hubungkan power 5 Volt pada input power relay. 2. Hubungkan inputan solenoid pada output relay. 3. Hubungkan inputan relay pada salah satu port arduino yang tersedia. 4. Buka program sketch arduino, Lakukan pemogramman. Upload program ke arduino. Pengujian solenoid valve ini bertujuan untuk mengetahui apakah alat ini sudah sesuai dengan rencana, maka dapat diketahui dengan cara menginput program pada arduino. Jika inputan program sudah sesuai dan berjalan dengan baik maka alat tersebut sudah dapat digunakan. Relay digunakan untuk mempermudah pemograman solenoid valve. Adapun bentuk fisik solenoid valve dan relay yang digunakan dapat dilihat pada gambar 4.10. Gambar 4.10 Solenoid valve dan relay

35 Table 4.6 Pengujian Solenoid Valve No Tegangan Input Solenoid Valve Keterangan 1 12 Volt 12 Volt Aktif 2 0 Volt 0 Volt Tidak Aktif Dari pengujian solenoid valve diatas dengan menginputkan tegangan 12 V, maka solenoid valve akan aktif, sedangkan dengan inputan 0 V maka solenoid valve tidak aktif. Dari pengujian ini dapat disimpulkan bahwa solenoid valve bekerja dengan baik dan siap digunakan.
4.7 Pengujian Alat Keseluruhan Pengujian alat keseluruhan dimulai dari beras mulai masuk dalam ruang pencucian, dan mulai proses pencucian beras. Setelah satu siklus proses pencucian beras selesai, maka solenoid mulai bekerja untuk membuang air limbah pencucian beras, serta sensor LDR pun memulai pembacaan tingkat kekeruhan air yang telah di program batas kekeruhan dan kejernihannya. Setelah beras dinyatakan telah bersih, maka motor servo akan membuka saluran ke ruang pemasakan nasi. Langkah Pengujian sebagai berikut: 1. Hubungkan power supply ke semua komponen yang ada pada rangkaian alat. 2. Setelah beras masuk ke dalam wadah pencucian, maka motor DC akan memulai proses pencucian. 3. Motor DC akan beroperasi selama 30 detik atau sesuai dengan program yang di inginkan. 4. Setelah satu siklus pencucian beras telah selesai, maka motor DC akan berhenti dan solenoid valve akan bekerja untuk membuang air pencucian beras. 5. Setelah air pencucian telah selesai dibuang dan solenoid valve mati, maka sensor LDR akan mulai membaca air hasil pencucian beras. 6. Jika hasil pembacaan sensor LDR menyatakan beras belum bersih maka sistem akan mengulang langkah 3 sampai langkah 5.

36 7. Namun jika hasil pembacaan sensor LDR menyatakan beras telah bersih, maka proses akan dilanjutkan dengan membuka saluran wadah pencucian. 8. Wadah pencucian di buka oleh motor servo sehingga beras akan mengalir pada ruang memasak nasi. 9. Proses terakhir ialah proses memasak beras hingga menjadi nasi. Pengujian ini bertujuan untuk mengetahui apakah seluruh rangkaian yang dibuat dapat berfungsi dengan baik atau tidak. Berikut ini adalah tabel pengujian sistem secara keseluruhan. Tabel 4.7 Pengujian keseluruhan No Beras (gram) Proses Motor DC 1 Motor servo 1 1. Pencucian Beras On 50˚ 2. 250 Pembacaan Sensor Off 50˚ 3. Memasak Nasi Off 180˚ solenoid Sensor LDR Motor DC 2 Motor servo 2 Off Off Off Off On On Off Off Off Off On On (0˚ - 180˚) Pada data diatas dapat dilihat terdaapat 3 proses yang di program pada beras seberat 250 gram, pertama beras akan dicuci oleh motor DC 1 (motor pencuci beras), dan motor servo yang terdapat pada katup saluran pencucian dalam keadaan tertutup (motor servo 1 = 50 ˚). Setelah prosses pencucian selesai maka solenoid akan dilanjutkan ke proses pembacaan sensor LDR. Pada proses ini solenoid valve akan aktif guna menyalurkan air hasil pencucian beras dan sensor LDR akan aktif (pembacaan sensor). Proses ini akan dilanjutkan apabila sensor LDR telah menyatakan bahwah beras telah bersih (Rsam ≤ Rmaks) Rmaks = 60 Ohm. Apabila Rsam lebih besar dari Rmaks maka proses akan mengulang proses pencucian kembali.

37 Jika beras telah bersih, proses akan dilanjutkan pada proses memasak nasi. Motor pembuka ruang pemasak nasi (motor DC 2) akan aktif dan Motor servo 1 akan terbuka (180˚) guna mengeluarkan beras yang telah dicuci. Setelah beras sudah keluar maka motor servo 1 akan menutup kembali (50˚), dan motor DC 2 akan menutup ruang pemasak nasi. Motor servo 2 akan aktif (0˚-180˚) untuk menekan tuas memasak guna memulai proses memasak nasi.

38 BAB V
PENUTUP
5.1 Kesimpulan Berdasarkan dari pembahasan dan pengujian alat dari bab sebelumnya, dapat diambil kesimpulan sebagai berikut : 1. Alat ini bekerja sebagaimana fungsinya, yaitu alat pencuci beras dengan memanfaatkan sensor LDR dimana sensor ini membaca air hasil pencucian beras untuk menentukan tingkat kebersihan beras. 2. Beras dikatakan sudah bersih jika Rsam ≤ Rmaks, yaitu saat nilai resistansi air hasil pencucian beras lebih kecil dari nilai resistansi Rmaks (60 Ohm). 3. Hasil pembacaan sensor LDR dapat berubah karena beberapa faktor yaitu, jarak antara sensor LDR dan LED, tingkat kepekaan sensor, dan warna LED. 5.2 Saran Berikut adalah saran yang penulis atau perancang ingin sampaikan agar kedepannya sistem alat pencucian beras dengan pemanfaatan ssensor LDR menjadi lebih baik. Apabila kedepannya ada yang ingin merevisi dan mengembangkan sistem alat ini. 1. Menyediakan supply cadangan sebagai alternatif jika power utama down sewaktu – waktu. 2. Power supply untuk motor servo dipisahkan agar tidak terjadi low power saat alat dijalankan. 3. Mencoba mencari alternative sensor lain. 4. Menggunakan alat dan bahan yang lebih baik. 5. Mengembangkan fungsi alat agar lebih mudah bagi para pengguna.

xv DAFTAR PUSTAKA
Roslinda Rasyid, et.al., 2014.”Pengaruh lama pencucian terhadap kadar vitamin B1 pada beras putih dan beras merah secara spektrofotometer visible”. Jurnal Farmasi Higea, Vol.6, No.2, 2014. Muhammad Syahwil. 2013. Panduan Mudah Simulasi dan Praktik : “Mikrokontroler Arduino.”, Yogyakarta : Andi Publisher. Sari Widya (2015), “Cara kerja dan Prinsip Rice cooker”. https://widyasarisite.wordpress.com/2015/03/19/cara-kerja-dan-prinsip-rice-cooker/ diakses tanggal 15 April 2017. Dermanto Trikueni (2013), “Pengertian dan Prinsip kerja Solenoid Valve” , http://trikueni-Desain-sistem.blogspot.co.id/2013/08/Solenoid-Valve.html ,diakses tanggal 15 April 2017. Supatmi, Sri. 2011.”Pengaruh Sensor LDR Terhadap Pengaruh Lampu”. Majalah Ilmiah UNIKOM, Vol.8, No.2, 2011. Desain Sistem Kontrol (2014), “Pengertian Motor Servo”. http://www.elektronikabersama.web.id/2011/06/saklar-toggle-spst-dan-spdt.html, diakses tanggal 16 April 2017. Zona Elektro (2014), “Motor DC”. http://zonaelektro.net/motor-dc/, diakses tanggal 17 April 2017. Elektronika Dasar (2012), “LCD (Liquid Crytal Display)”. http://elektronika-dasar.web.id/lcd-liquid-cristal-display/, diakses tanggal 17 April 2017.

Lampiran 1 The Arduino Uno is a microcontroller board based on the ATmega328 (datasheet). It has 14 digital input/output pins (of which 6 can be used as PWM outputs), 6 analog inputs, a 16 MHz crystal oscillator, a USB connection, a power jack, an ICSP header, and a reset button. It contains everything needed to support the microcontroller; simply connect it to a computer with a USB cable or power it with a AC-to-DC adapter or battery to get started. The Uno differs from all preceding boards in that it does not use the FTDI USB-to-serial driver chip. Instead, it features the Atmega8U2 programmed as a USB-to-serial converter. "Uno" means one in Italian and is named to mark the upcoming release of Arduino 1.0. The Uno and version 1.1 will be the reference versions of Arduno, moving forward. The Uno is the latest in a series of USB Arduino boards, and the reference model for the Arduino platform; for a comparison with previous versions, see the index of Arduino boards.

EAGLE files: arduino-duemilanove-uno-design.zip Schematic: arduino-uno-schematic.pdf
Microcontroller ATmega328 Operating Voltage 5V Input Voltage (recommended) 7-12V Input Voltage (limits) 6-20V Digital I/O Pins 14 (of which 6 provide PWM output) Analog Input Pins 6 DC Current per I/O Pin 40 Ma DC Current for 3.3V Pin 50 mA Flash Memory 32 KB of which 0.5 KB used by
Bootloader SRAM 2 KB EEPROM 1 KB Clock Speed 16 MHz

The Arduino Uno can be powered via the USB connection or with an external power supply. The power source is selected automatically. External (non-USB) power can come either from an AC-to-DC adapter (wall-wart) or battery. The adapter can be connected by plugging a 2.1mm center-positive plug into the board's power jack. Leads from a battery can be inserted in the Gnd and Vin pin headers of the POWER connector. The board can operate on an external supply of 6 to 20 volts. If supplied with less than 7V, however, the 5V pin may supply less than five volts and the board may be unstable. If using more than 12V, the voltage regulator may overheat and damage the board. The recommended range is 7 to 12 volts. The power pins are as follows: • VIN. The input voltage to the Arduino board when it's using an external power source (as opposed to
5 volts from the USB connection or other regulated power source). You can supply voltage through this pin, or, if supplying voltage via the power jack, access it through this pin. • 5V. The regulated power supply used to power the microcontroller and other components on the board. This can come either from VIN via an on-board regulator, or be supplied by USB or another regulated 5V supply. • 3V3. A 3.3 volt supply generated by the on-board regulator. Maximum current draw is 50 mA. • GND. Ground pins.
The Atmega328 has 32 KB of flash memory for storing code (of which 0,5 KB is used for the bootloader); It has also 2 KB of SRAM and 1 KB of EEPROM (which can be read and written with the EEPROM library). Each of the 14 digital pins on the Uno can be used as an input or output, using pinMode(), digitalWrite(), and digitalRead() functions. They operate at 5 volts. Each pin can provide or receive a maximum of 40 mA and has an internal pull-up resistor (disconnected by default) of 20-50 kOhms. In addition, some pins have specialized functions: • Serial: 0 (RX) and 1 (TX). Used to receive (RX) and transmit (TX) TTL serial data. TThese pins are
connected to the corresponding pins of the ATmega8U2 USB-to-TTL Serial chip . • External Interrupts: 2 and 3. These pins can be configured to trigger an interrupt on a low value, a rising or falling edge, or a change in value. See the attachInterrupt() function for details. • PWM: 3, 5, 6, 9, 10, and 11. Provide 8-bit PWM output with the analogWrite() function. • SPI: 10 (SS), 11 (MOSI), 12 (MISO), 13 (SCK). These pins support SPI communication, which, although provided by the underlying hardware, is not currently included in the Arduino language. • LED: 13. There is a built-in LED connected to digital pin 13. When the pin is HIGH value, the LED is on, when the pin is LOW, it's off.

The Uno has 6 analog inputs, each of which provide 10 bits of resolution (i.e. 1024 different values). By default they measure from ground to 5 volts, though is it possible to change the upper end of their range using the AREF pin and the analogReference() function. Additionally, some pins have specialized functionality: • I2C: 4 (SDA) and 5 (SCL). Support I2C (TWI) communication using the Wire
library. There are a couple of other pins on the board: • AREF. Reference voltage for the analog inputs. Used with analogReference(). • Reset. Bring this line LOW to reset the microcontroller. Typically used to add a reset button to shields which block the one on the board.
See also the mapping between Arduino pins and Atmega328 ports. The Arduino Uno has a number of facilities for communicating with a computer, another Arduino, or other microcontrollers. The ATmega328 provides UART TTL (5V) serial communication, which is available on digital pins 0 (RX) and 1 (TX). An ATmega8U2 on the board channels this serial communication over USB and appears as a virtual com port to software on the computer. The '8U2 firmware uses the standard USB COM drivers, and no external driver is needed. However, on Windows, an *.inf file is required.. The Arduino software includes a serial monitor which allows simple textual data to be sent to and from the Arduino board. The RX and TX LEDs on the board will flash when data is being transmitted via the USB-to-serial chip and USB connection to the computer (but not for serial communication on pins 0 and 1). A SoftwareSerial library allows for serial communication on any of the Uno's digital pins. The ATmega328 also support I2C (TWI) and SPI communication. The Arduino software includes a Wire library to simplify use of the I2C bus; see the documentation for details. To use the SPI communication, please see the ATmega328 datasheet. The Arduino Uno can be programmed with the Arduino software (download). Select "Arduino Uno w/ ATmega328" from the Tools > Board menu (according to the microcontroller on your board). For details, see the reference and tutorials. The ATmega328 on the Arduino Uno comes preburned with a bootloader that allows you to upload new code to it without the use of an external hardware programmer. It communicates using the original STK500 protocol (reference, C header files). You can also bypass the bootloader and program the microcontroller through the ICSP (In-Circuit Serial Programming) header; see these instructions for details. The ATmega8U2 firmware source code is available . The ATmega8U2 is loaded with a DFU bootloader, which can be activated by connecting the solder jumper on the back of the board (near the map of Italy) and then resetting the 8U2. You can then use Atmel's FLIP software (Windows) or the DFU programmer (Mac OS X and Linux) to load a new firmware. Or you can use the ISP header with an external programmer (overwriting the DFU bootloader).

Rather than requiring a physical press of the reset button before an upload, the Arduino Uno is designed in a way that allows it to be reset by software running on a connected computer. One of the hardware flow control lines (DTR) of the ATmega8U2 is connected to the reset line of the ATmega328 via a 100 nanofarad capacitor. When this line is asserted (taken low), the reset line drops long enough to reset the chip. The Arduino software uses this capability to allow you to upload code by simply pressing the upload button in the Arduino environment. This means that the bootloader can have a shorter timeout, as the lowering of DTR can be well-coordinated with the start of the upload. This setup has other implications. When the Uno is connected to either a computer running Mac OS X or Linux, it resets each time a connection is made to it from software (via USB). For the following half-second or so, the bootloader is running on the Uno. While it is programmed to ignore malformed data (i.e. anything besides an upload of new code), it will intercept the first few bytes of data sent to the board after a connection is opened. If a sketch running on the board receives one-time configuration or other data when it first starts, make sure that the software with which it communicates waits a second after opening the connection and before sending this data. The Uno contains a trace that can be cut to disable the auto-reset. The pads on either side of the trace can be soldered together to re-enable it. It's labeled "RESET-EN". You may also be able to disable the auto-reset by connecting a 110 ohm resistor from 5V to the reset line; see this forum thread for details. The Arduino Uno has a resettable polyfuse that protects your computer's USB ports from shorts and overcurrent. Although most computers provide their own internal protection, the fuse provides an extra layer of protection. If more than 500 mA is applied to the USB port, the fuse will automatically break the connection until the short or overload is removed. The maximum length and width of the Uno PCB are 2.7 and 2.1 inches respectively, with the USB connector and power jack extending beyond the former dimension. Three screw holes allow the board to be attached to a surface or case. Note that the distance between digital pins 7 and 8 is 160 mil (0.16"), not an even multiple of the 100 mil spacing of the other pins.

Arduino can sense the environment by receiving input from a variety of sensors and can affect its surroundings by controlling lights, motors, and other actuators. The microcontroller on the board is programmed using the Arduino programming language (based on Wiring) and the Arduino development environment (based on Processing). Arduino projects can be stand-alone or they can communicate with software on running on a computer (e.g. Flash, Processing, MaxMSP). Arduino is a cross-platoform program. You’ll have to follow different instructions for your personal OS. Check on the Arduino site for the latest instructions. http://arduino.cc/en/Guide/HomePage Once you have downloaded/unzipped the arduino IDE, you can Plug the Arduino to your PC via USB cable. Now you’re actually ready to “burn” your first program on the arduino board. To select “blink led”, the physical translation of the well known programming “hello world”, select File>Sketchbook> Arduino-0017>Examples> Digital>Blink Once you have your skecth you’ll see something very close to the screenshot on the right. In Tools>Board select Now you have to go to Tools>SerialPort and select the right serial port, the one arduino is attached to.

Di


Specifications:
• Operating Voltage: 3.3V to 5V DC • Operating Current: 15ma • Output Digital - 0V to 5V, Adjustable trigger level from preset • Output Analog - 0V to 5V based on light falling on the LDR • LEDs indicating output and power • PCB Size: 3.2cm x 1.4cm • LM393 based design
Pin details
• VCC = 3.3V to 5V DC • GND = Ground • DO = Digital Output • AO = Analog Output

Board Schematic:
How to use
• Photosensitive resistor module most sensitive to environmental light intensity is generally used to detect the ambient brightness and light intensity.
• Module light conditions or light intensity reach the set threshold, DO port output high, when the external ambient light intensity exceeds a set threshold, the module D0 output low;
• Digital output D0 directly connected to the MCU, and detect high or low TTL, thereby detecting ambient light intensity changes;
• Digital output module DO can directly drive the relay module, which can be composed of a photoelectric switch;
• Analog output module AO and AD modules can be connected through the AD converter, you can get a more accurate light intensity value