bab iii perancangan sistem 1.1 perancangan sistem...
TRANSCRIPT
8
BAB III
PERANCANGAN SISTEM
Dengan memahami konsep dasar alat pada bab sebelumnya yang mencakup
gambaran sistem prinsip kerja dan komponen-komponen pembentuk sistem, maka pada
bab ini akan dibahas mengenai perancangan sistem yang meliputi perangkat keras dan
perangkat lunak.
1.1 Perancangan Sistem Mekanik
Mekanik ini terdiri dari rangka utama yaitu terdapat 2 pipa besi sebagai kaki meja
yang didalamnya terdapat aktuator linier sebagai penggerak naik dan turun nya meja dan
rangka penyangga landasan meja kerja. Mekanik meja ini memiliki dimensi panjang 120
cm, lebar 60 dan tinggi minimal 72 cm sampai tinggi maksimal 122 cm.
1.1.1 Rangka Utama
Rangka utama ini dibuat tediri dari 2 bagian yaitu sambungan kaki meja dan
rangka landasan meja. Bagian sambungan kaki meja ini berfungsi sebagai tempat aktuator
untuk bergerak naik dan turun. Sambungan kaki meja yang dibuat menggunakan dua pipa
besi dengan ukuran yang berbeda. Untuk pipa besi bagian dalam menggunakan ukuran 2
inch dan bagian luar 2,5 inch. Sehingga memungkinkan untuk kaki meja begerak naik
dan turun. Sedangkan rangka untuk landasan meja dibuat menggunakan besi persegi
panjang/hollow. Pemilihan besi persegi panjang/hollow pada rangka landasan meja
karena cukup ringan dan kuat.
Landasan meja dibuat dengan menggunakan papan kayu dengan jenis blockboard
dengan ketebalan 2 cm dengan dimensi panjang 120 cm dan lebar 60 cm. Pemilihan jenis
papan kayu menggunakan blockboard dikarenakan bahan kayu yang cukup ringan dan
kuat untuk menopang beban yang akan diletakkan pada landasan meja. Papan kayu ini
dilapisi dengan suatu bahan yaitu HPL ( High Pressure Laminated ). Tujuan dipasangnya
HPL ini adalah karena HPL merupakan bahan yang cukup anti gores dan anti air. Berikut
adalah gambar perancangan dan realisasi rangka utama.

9
Gambar 3.1 Perancangan Mekanik Meja
Keterangan gambar :
1. Tempat gear box
2. Pipa sambungan kaki meja dan tempat ulir
3. Dudukan landasan meja
Gambar 3.2 Realisasi rangka utama
10
Gambar 3.3 Realisasi mekanik meja keseluruhan
3.1.2 Perancangan Aktuator
Aktuator pada kaki meja ini digerakkan oleh sebuah motor DC sebagai penggerak
dan poros ulir sebagai pengubah gaya putar motor menjadi gaya dorong untuk landasan
meja. Dalam merancang aktuator linier ini terdiri dari 2 komponen utama yaitu motor
gear box motor DC, dan lead screw.
3.1.2.1 Lead Screw
Lead screw adalah poros berulir yang merupakan pengubah gerakan dengan
memanfaatkan gaya tekan akibat putaran ulir menjadi gerakan linier. Pada skripsi ini
meja diatur ketinggiannya agar dapat mengangkat beban maksimum sebesar 50 kg.
Gambar 3.4 Lead Screw
Lead screw yang digunakan pada skripsi ini memiliki ukuran pitch (l) 5 mm,
diameter luar ulir (d) 16 mm, diameter dalam ulir (dr) 14 mm dan diameter pitch (dm)
11
15 mm . Dalam hal ini ulir menggunakan baut (nut) sebagai penyangga naik turun
pada ulir, maka koefsien gesek yang bekerja pada ulir yaitu 0,15 [4]. Sehinnga
persamaan yang digunakan untuk menghitung torsi gaya dorong ulir akan digunakan
persamaan 3.1 [5]:
T = 𝐹𝑑𝑚
2 (
𝑙+ 𝜋𝑓𝑑𝑚
𝜋𝑑𝑚−𝑓𝑙 ) (3.1)
Di mana :
T = Torsi pada ulir (Nm)
Dm = diameter pitch ulir (m)
F = Gaya dorong (N)
f = koefisien gesek permukaan ulir
l = kisar/pitch ulir (m)
Dari persamaan 3.1, maka akan dapat dihitung torsi yang bekerja pada ulir.
Diketahui :
Beban maksimum = 50kg = (50 x 9.8) = 490 N
Diameter pitch (dm) = 15 mm
Pitch lead screw ( l ) = 5 mm
Koefisien gesek ulir ( f ) = 0,15
Torsi yang bekerja untuk mengangkat beban pada ulir adalah sebesar :
T = 𝐹𝑑𝑚
2 (
𝑙+ 𝜋𝑓𝑑𝑚
𝜋𝑑𝑚−𝑓𝑙 )
T = (490)(0.015 )
2 (
(0.005)+(3,14)(0,15)(0.015)
(3.14.0.015)−(0.15.0.005) )
T = 3,675 ( 0,255)
T = 0,93 Nm
Maka torsi yang bekerja pada ulir adalah sebesar 0,93 Nm. Untuk dapat
mengangkat beban pada ulir, maka torsi yang dibutuhkan oleh motor haruslah lebih
besar dari pada torsi yang bekerja pada ulir.

12
3.1.2.2 Gear Box
Untuk dapat mendorong beban pada meja torsi yang dihasilkan motor harus lebih
besar daripada torsi yang bekerja pada ulir. Semakin besar kecepatan motor maka
torsi yang dihasilkan akan menurun. Untuk menghasilkan torsi yang besar, maka pada
motor DC diperlukan gear box. Gear box adalah perangkat mekanis yang digunakan
untuk meningkatkan keluaran torsi dan mengurangi kecepatan atau RPM (Rotasi Per
Menit) dari sebuah motor. Berikut adalah gambar konfigurasi perancangan dan
realisasi gear pada gear box .
Gambar 3.5 Konfigurasi gear box
Gambar 3.6 Realisasi gear box
Dengan kombinasi gear box seperti pada gambar diatas akan didapat akan
didapat gear ratio untuk mengurangi kecepatan dan meningkatkan torsi dari motor
DC. Sehingga dengan kombinasi gear tersebut akan dihasilkan reduksi putaran motor.
13
Untuk mengetahui RPM output N(OUT) pada gear box dapat dihitung dengan
persamaan 3.2 [6].
𝑁 (𝑖𝑛)
𝑁 (𝑜𝑢𝑡) =
𝑧𝐵𝑧𝐷
𝑧𝐴𝑧𝐶 (3.2)
Keterangan :
N(in) = Kecepatan input motor DC (RPM)
N(out) = Kecepatan output gear box (RPM)
zA = Jumlah gigi gear A
zB = Jumlah gigi gear B
zC = Jumlah gigi gear C
zD = Jumlah gigi gear D
Daya yang dihasilkan oleh motor DC diapat dihitung persamaan sebagai berikut
3.3 [7].
P = 𝑇𝑚 .2𝜋 . 𝑁
60 (3.3)
Dimana :
P = daya output motor (watt)
Tm = Torsi yang dihasilkan motor
N = Putaran motor (RPM)
Perhitungan kecepatan reduksi gear dapat dicari dengan perhitungan sebagai berikut.
Diketahui :
Tegangan = 24 V
Arus = 0,5 A
Kecepatan motor A = 1890 RPM
Jumlah gigi gear A = 7
Jumlah gigi gear B = 47
Jumlah gigi gear C = 9
Jumlah gigi gear D = 43
14
Sehingga dengan persamaan 3.2 akan,didapat kecepatan maksimal output
gear box.
1890
𝑁 (𝑂𝑈𝑇) =
47𝑥 43
7 𝑥 9
1890
𝑁 (𝑂𝑈𝑇) = 32
N (OUT) = 58,9 RPM
Dengan kombinasi gear pada Gambar 3.5 didapat kecepatan output motor
sebesar 58,9 RPM. Output putaran dari gear box akan terhubung dengan poros ulir,
sehingga gerakan putaran pada poros ulir dapat diubah menjadi gerakan translasi.
Kecepatan translasi pada ulir sangat dipengaruhi oleh nilai RPM dan besar nilai
kisar/pitch pada ulir.
Setelah diketahui kecepatan poros output pada gear box maka dapat dihitung
torsi yang dihasilkan oleh gear box menggunakan persamaan 3.3.
V.I = 𝑇𝑚 2𝜋 𝑁
60
24 . 0,5 = 𝑇𝑚 ( 6,28 )( 58,91)
60
Tm = 1,94 Nm
Ulir yang digunakan memiliki kisar 5 mm, ini berarti setiap satu putaran motor
mampu menaikkan beban setinggi 5 mm dan dan kecepatan output motor yang
dihasilkan sebesar 58,9 RPM. Sehinngga untuk mengetahui putaran motor saat diberi
beban dapat dihitung dengan menggunakan perhitungan (3.4) [8].
v = 𝑁𝑙
60 mm/s (4.1)
dimana : v = kecepatan ulir (mm/s)
N = kecepatan motor (RPM)
l = kisar/pitch ulir (mm)
Maka kecepatan ulir yang dihasilkan adalah :
v = 𝑁𝑙
60 mm/s
v = (58,9)(5)
60 mm/s
v = 4,9 mm/s
15
Berdasarkan perhitungan perancangan di atas didapatkan hasil kebutuhan torsi
motor untuk mampu mengerakkan ulir saat mengangkat beban maksimal. Pada
perhitungan perancangan di atas, didapat torsi yang bekerja pada ulir untuk dapat
mengangkat beban sebesar 0,93 Nm dan torsi yang dihasilkan motor sebesar 1,94 Nm.
Sehingga dengan dari hasil perhitungan perancangan dimana torsi motor DC yang
didapat adalah lebih besar dari torsi yang bekerja pada ulir, maka motor DC dapat
menggerakkan beban seberat 50 kg pada landasan meja. Berikut adalah gambar
realisasi perancangan aktuator.
Gambar 3.7 Realisasi aktuator
3.2 Komponen Elektronik
Bagian ini akan menjelaskan komponen elektronik yang digunakan demi
mendukung pembuatan alat, antara lain modul mikrokontroler, Modul SRF, Modul
Bluetooth, modul RTC, aktuaror linier dan driver motor.
3.2.1 Mikrokontroler
Pada skripsi ini, modul kontrol dikendalikan oleh mikrokontroler Atmega 2560
sebagai pengendali utama. Sebagai pengendali utama, tugas mikrokontroler antara lain :
1. Mengambil data pewaktuan dari modul RTC.
2. Mengolah data ketiggian dari modul SRF.
3. Melakukan komunikasi dengan android smartphone melalui media Bluetooth
menggunakan modul Bluetooth HC-05.
4. Mengaktifkan aktuator linier untuk bergerak naik dan turun melalui driver
motor.

16
Mikrokontroler Arduino 2560 nantinya akan memproses seluruh data hasil
pengukuran jarak dan penghitungan pewaktuan dan akan ditampilkan pada smartphone.
Pada realisasi alat ini dibutuhkan komunikasi serial dengan komputer untuk memastikan
apakah data yang dikirim melalui smartphone android sudah sesuai dengan data yang
diterima oleh mikrokontroler.
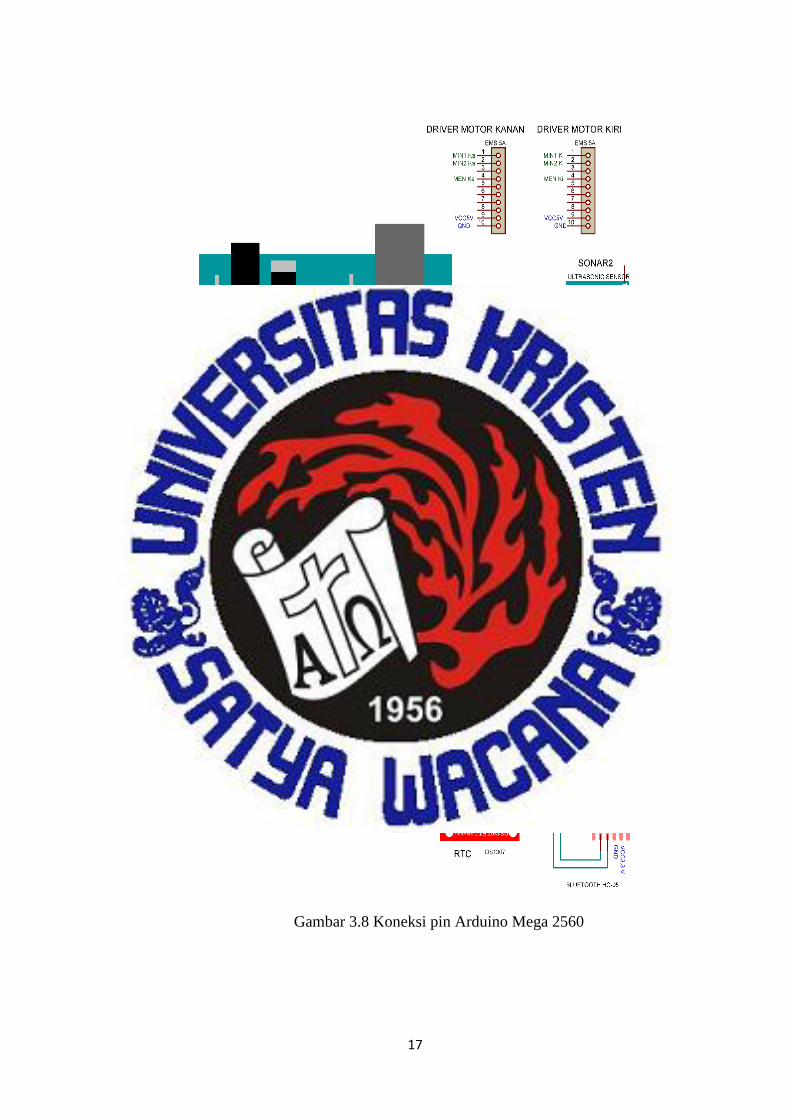
Konfigurasi pin mikrokontrolerr yang digunakan sebagai pengendali utama akan
ditunjukkan pada Tabel 3.1, Gambar 3.8, dan realisasi rangkaian pada mikrokontroler
pada Gambar 3.9
Tabel 3.1 Konfigurasi penggunaan pin Arduino Mega 2560
Pin Fungsi
Pin 2 Data Trigger SRF04
Pin 3 Data Echo SRF04
Pin 4 enable untuk output driver motor H-Bridge EMS
Pin 5 enable untuk output driver motor H-Bridge EMS
Pin 6 Data Trigger SRF04
Pin 7 Data Echo SRF04
Pin 8 Data menentukan output MOUT 1 motor kiri
Pin 9 Data menentukan output MOUT 2 motor kiri
Pin 10 menentukan output MOUT 1 motor kanan
Pin 11 menentukan output MOUT 2 motor kanan
Pin SDA Data SDA RTC
Pin SCL Data SCL RTC
Pin 1 (TX0) RX HC-05
Pin 2 (RX0) TX HC-05
17
Gambar 3.8 Koneksi pin Arduino Mega 2560

18
Gambar 3.9 Realisasi rangkaian mikrokontroler keseluruhan
3.3.2 Sensor SRF04
Sensor ultrasonic SRF04 yang digunakan ini merupakan sensor yang mempunyai
kemampuan mengubah energi listrik menjadi energi mekanik dalam bentuk gelombang
suara ultrasonik. Pada perancangan alat ini, sensor ultrasonic SRF04 digunakan sebagai
pengukur jarak ketinggian landasan meja terhadap lantai.
Gambar 3.10 Modul SRF04

19
Sensor ini mempunyai prinsip kerja bagian pemancar (Transmitter) pada modul
ini bertugas mengirimkan gelombang ultrasonik , lalu diukur waktu yang dibutuhkan
hingga datangnya gelombang pantul dari objek yang sudah terdeteksi ke bagian penerima
(Receiver). Lamanya waktu ini sebanding dengan 2 kali jarak sensor dengan objek,
sehingga didapat jarak dari sensor terhadap lantai yang ditentukan dengan persamaan
sebagai berikut [9].
𝐽𝑎𝑟𝑎𝑘 = ( 𝐾𝑒𝑐𝑒𝑝𝑎𝑡𝑎𝑛 𝑠𝑢𝑎𝑟𝑎 × 𝑊𝑎𝑘𝑡𝑢 𝑝𝑎𝑛𝑡𝑢𝑙)/2
Gambar 3.11 Sistem kerja sensor ultrasonik
Sebagai pengukur jarak ketinggian pada alat ini,. Sensor HC-SR04 di batasi
dengan jarak maksimal pengukuran jarak sejauh 120 cm dan minimal 72 cm. Jika
pengukuran jarak terhadap lantai kurang dari 72 cm maka akan tetap terbaca 72 cm
sedangan pengukuran jarak terhadap lantai lebih dari 120 cm akan tetap terbaca 120 cm.
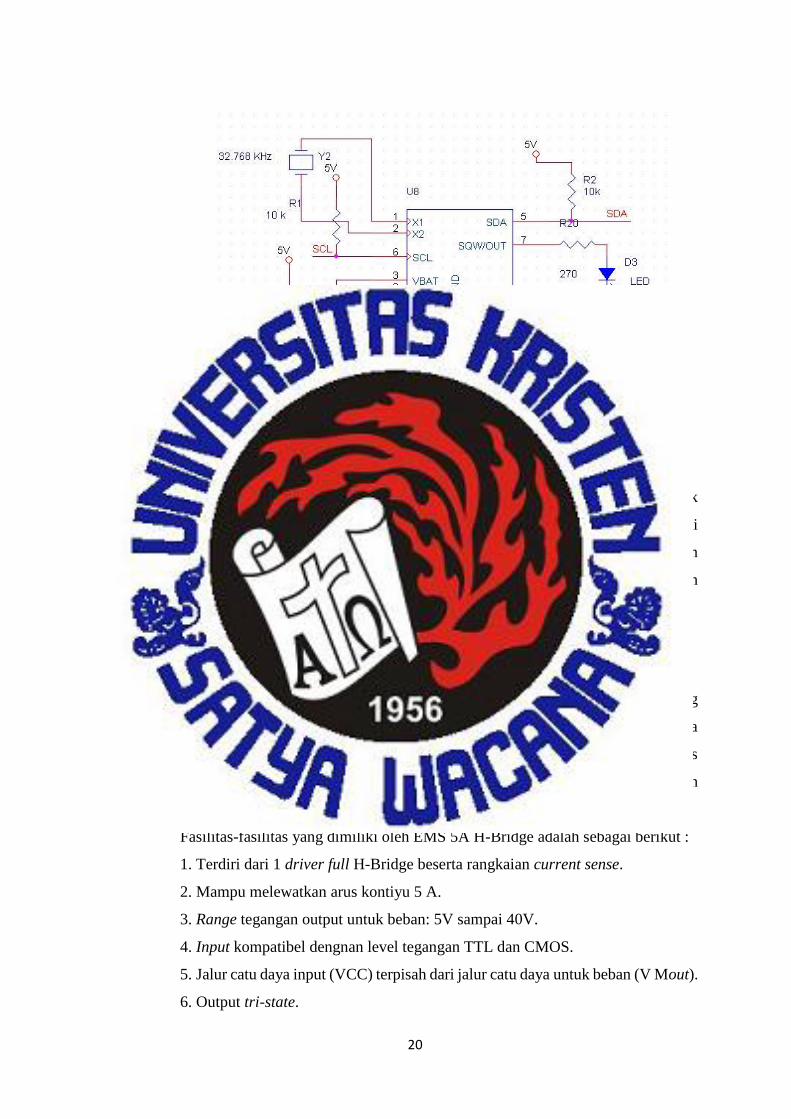
3.2.3 Real Time Clock (RTC)
Fungsi real time clock dalam perancangan ini adalah untuk mengetahui
pewaktuan yang nantinya digunakan untuk menghitung lama waktu posisi duduk dan
berdiri sesuai set point dari pengguna. Pada perancangan ini, RTC yang digunakan adalah
IC DS1307 dari Maxim Integrated dengan rangkaian yang ditunjukkan pada Gambar
3.12.
20
Gambar 3.12 Rangkaian Real Time Clock (RTC) DS1307
RTC dilengkapi dengan baterai CMOS seri CR2032 dengan tegangan 3V untuk
memberikan catu daya. Kristal yang dipakai dalam RTC ini adalah 32.768 kHz sesuai
dengan datasheet DS1307. Pin SDA dan SCL dari RTC dihubungkan pada pin SDA dan
SCL dalam mikrokontroler Arduino 2560 dan komunikasi dilakukan menggunakan
protocol I2C [10].
3.2.4 Driver Motor EMS 5 A H-Bridge
Embedded Module Series (EMS) 5 A H-Bridge merupakan driver H-Bridge yang
didesain untuk menghasilkan drive 2 arah dengan arus kontiyu sampai dengan 5 A pada
tegangan 5 Volt sampai 40 Volt. Modul ini dilengkapi dengan rangkaian sensor arus
beban yang dapat digunakan sebagai umpan balik ke pengendali. Modul ini digunakan
untuk menggerakkan aktuator.
Fasilitas-fasilitas yang dimiliki oleh EMS 5A H-Bridge adalah sebagai berikut :
1. Terdiri dari 1 driver full H-Bridge beserta rangkaian current sense.
2. Mampu melewatkan arus kontiyu 5 A.
3. Range tegangan output untuk beban: 5V sampai 40V.
4. Input kompatibel dengnan level tegangan TTL dan CMOS.
5. Jalur catu daya input (VCC) terpisah dari jalur catu daya untuk beban (V Mout).
6. Output tri-state.
21
7. Dilengkapi dengan diode eksternal untuk pengaman beban induktif.
8. Frekuensi PWM sampai dengan 10 KHz.
9. Active Curret Limiting.
10. Proteksi overtemperature.
11. Proteksi hubung singkat.
12. Undervoltage Shutdown.
Modul H-Bridge memiliki 1 set header (J2) dan 1 set terminal konektor (J1).
Interface header (J2) berfungsi sebagai input antarmuka dengan input digital serta output
analog dari modul H-Bridge. Berikut deskripsi dari masing-masing pin pada interface
header:
Tabel 3.2 Tabel deskripsi fungsi pin-pin pin interface header EMS 5A.
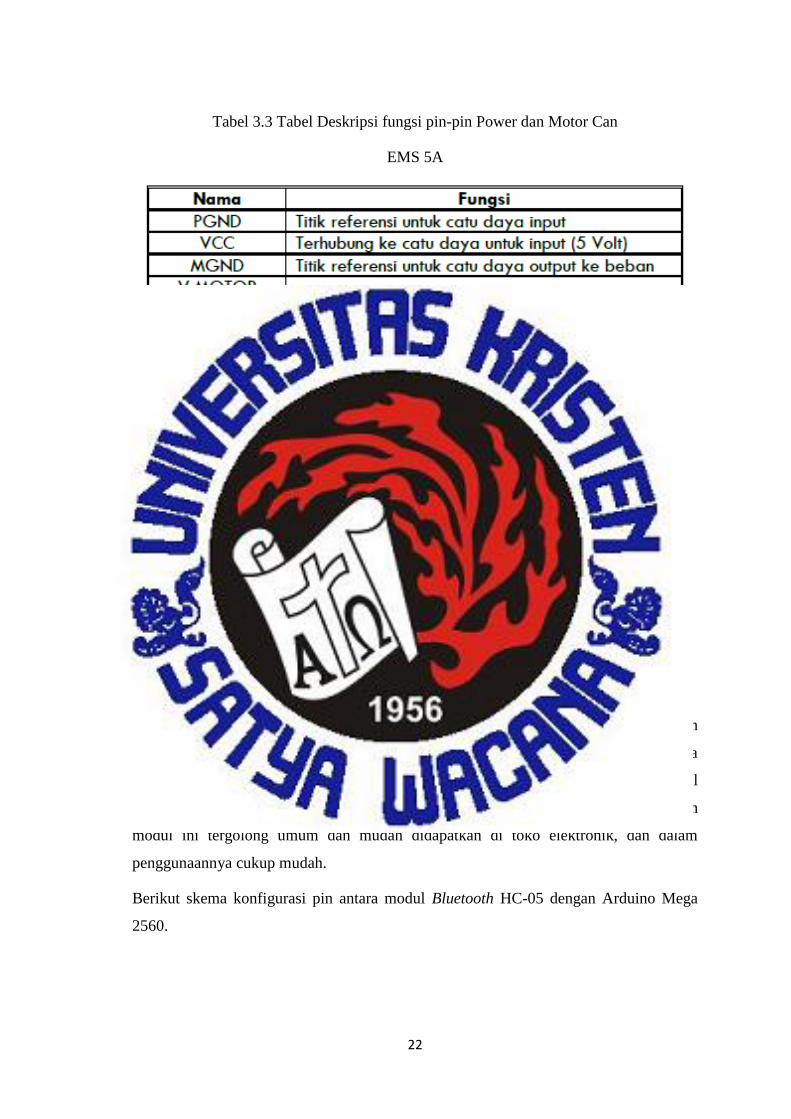
Power dan Motor Can (j1) berfungsi sebagai konektor untuk catu daya dan
beban. Berikut deskripsi dari masing-masing terminal dapa Power dan motor Can [11]:
22
Tabel 3.3 Tabel Deskripsi fungsi pin-pin Power dan Motor Can
EMS 5A
Gambar 3.13 Driver motor EMS 5A
3.2.5 Modul Bluetooth HC05
Pada tugas akhir ini dibutuhkan komunikasi antara android smartphone dengan
mikrokontroler yang terdapat pada meja secara nirkabel, maka akan digunakan media
bluetooth sebagai sarana pengiriman data. Untuk melakukan komunikasi secara nirkabel
akan digunakan modul Bluetooth HC-05. Pemilihan Modul Bluetooth HC-05 dikarenakan
modul ini tergolong umum dan mudah didapatkan di toko elektronik, dan dalam
penggunaannya cukup mudah.
Berikut skema konfigurasi pin antara modul Bluetooth HC-05 dengan Arduino Mega
2560.

23
Gambar 3.14 Skema konfigurasi pin Bluetooth HC-05
Agar mikrokontroler dapat menerima instruksi dari android smartphone, pin RX0
Arduino Mega 2560 dihubungkan dengan pin TX dari modul Bluetooth HC-05, sedang
pin TX1 Arduino Mega 2560 terhubung dengan pin RX modul Bluetooth HC-05 [12].
3.3 Perancangan Perangkat Lunak Mikrokontroler
Perangkat lunak yang ditanamkan pada mikrokontroler ini berguna untuk
mengolah data yang diterima dari aplikasi pada smartphone android. Data yang diterima
mikrokontroler berfungsi sebagai penggerak aktuator naik dan turun, pembacaan jarak
ketinggian meja terhadap lantai serta pewaktuan lamanya waktu duduk dan berdiri.
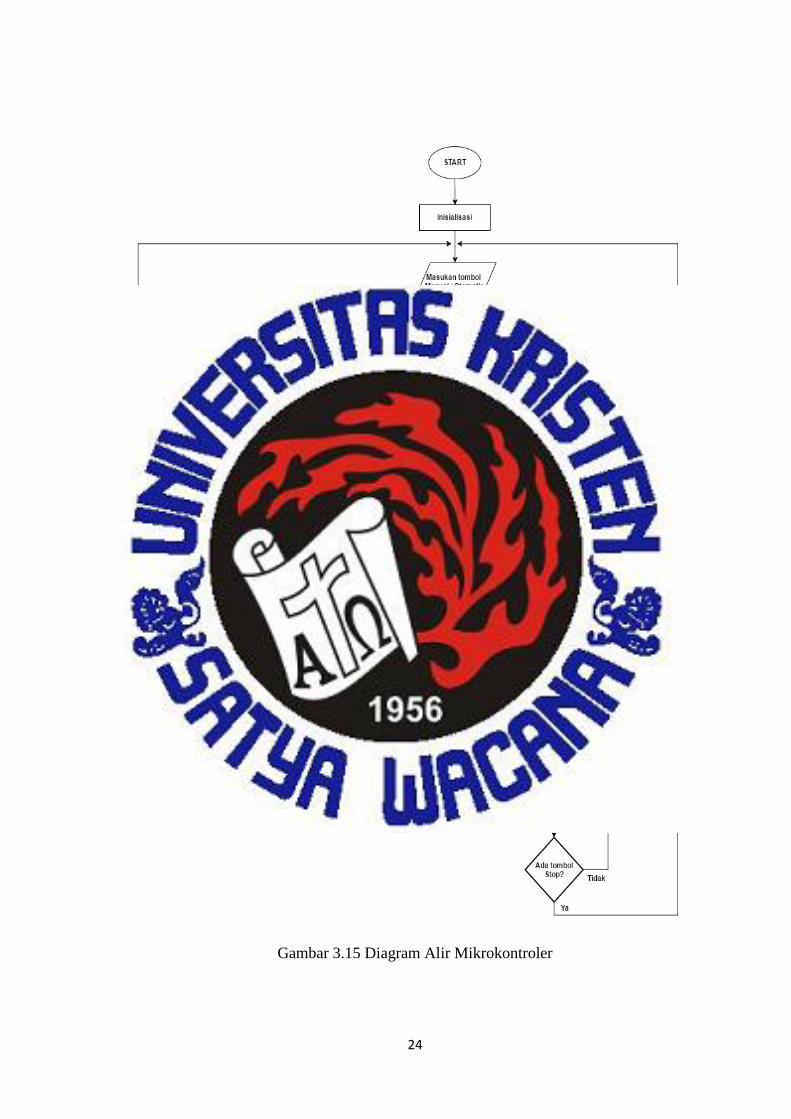
Berikut adalah diagaram alir dari perangkat lunak mikrokontroler yang direalisasikan.
24
Gambar 3.15 Diagram Alir Mikrokontroler
25
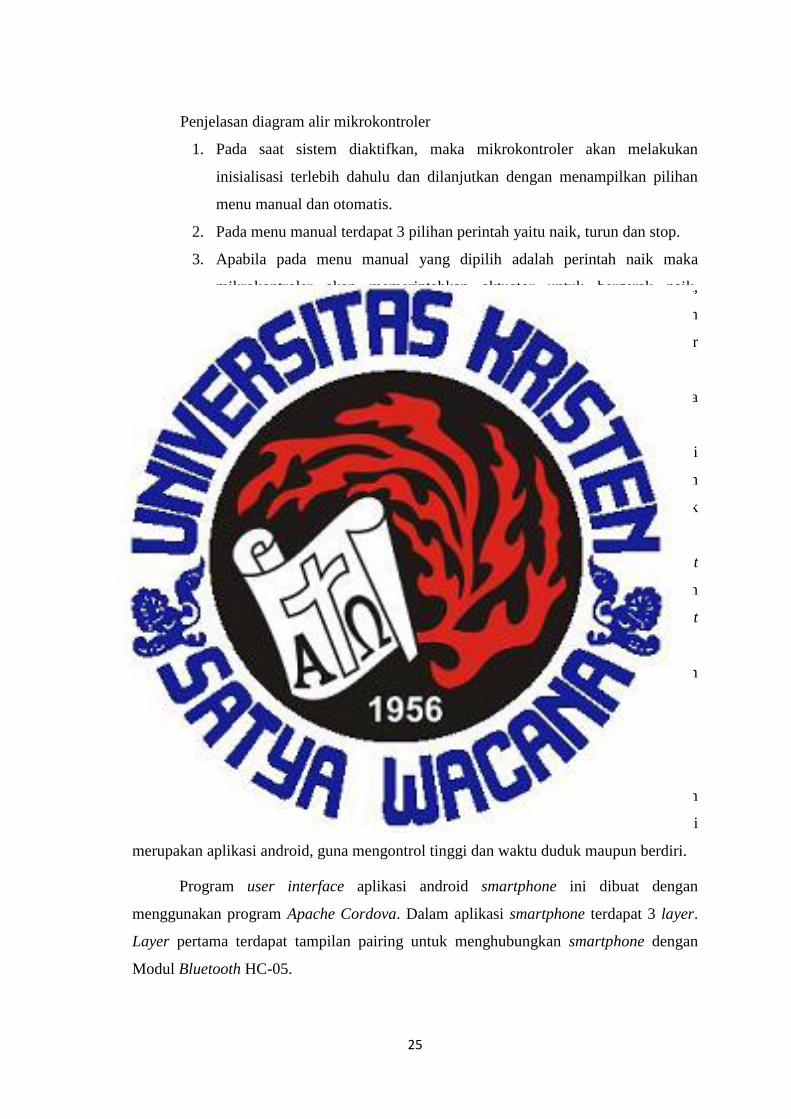
Penjelasan diagram alir mikrokontroler
1. Pada saat sistem diaktifkan, maka mikrokontroler akan melakukan
inisialisasi terlebih dahulu dan dilanjutkan dengan menampilkan pilihan
menu manual dan otomatis.
2. Pada menu manual terdapat 3 pilihan perintah yaitu naik, turun dan stop.
3. Apabila pada menu manual yang dipilih adalah perintah naik maka
mikrokontroler akan memerintahkan aktuator untuk bergerak naik,
sedangkan apabila diberikan perintah turun aktuator akan bergerak turun
sesuai ketinggian yang diinginkan oleh user dan perintah stop maka aktuator
akan berhenti.
4. Sedangkan pada menu otomatis, user harus memasukkan inputan berupa
jarak posisi duduk maupun berdiri dan waktu posisi duduk dan berdiri.
5. Sistem akan memeriksa apakah pembacaan jarak ketinggian untuk posisi
duduk. Apabila pembacaan jarak untuk posisi duduk sudah sesuai dengan
set point, maka akan mulai dihitung lama pewaktuan untuk posisi duduk
sesuai setingan.
6. Saat penghitungan waktu untuk posisi duduk sudah sesuai dengan set point
yang dimasukkan oleh user, maka mikrokontroler akan memerintahkan
meja untuk bergerak naik sampai ketinggian posisi berdiri sesuai set point
yang dimasukkan oleh user.
7. Pada menu otomatis ini perintah akan terus berulang dan hanya akan
berhenti ketika diberikan perintah Stop.
3.4 Aplikasi User Interface Android Smartphone
Meja ini dilengkapi pula dengan aplikasi user interface yang terhubung dengan
mikrokontroler secara nirkabel melalui media bluetooth. Aplikasi user interface ini
merupakan aplikasi android, guna mengontrol tinggi dan waktu duduk maupun berdiri.
Program user interface aplikasi android smartphone ini dibuat dengan
menggunakan program Apache Cordova. Dalam aplikasi smartphone terdapat 3 layer.
Layer pertama terdapat tampilan pairing untuk menghubungkan smartphone dengan
Modul Bluetooth HC-05.

26
Gambar 3.16. Tampilan pairing bluetooth
Setelah smartphone android terhubung dengan dengan modul bluetooth HC-05
maka secara otomatis aplikasi akan masuk ke menu tampilan. Pada menu tampilan
terdapat 2 pilihan menu yaitu menu manual dan menu otomatis. Apabila user memilih
menu manual maka akan tertampil pilihan tombol perintah yaitu naik, turun dan stop.
Apabila user menekan tombol “NAIK” maka meja akan bergerak naik sesuai dengan
keinginan tinggi meja yang akan digunakan oleh user. Sedangkan tombol “TURUN”
berfungsi untuk menurunkan meja sesuai keinginan user. Meja akan berhenti bergerak
baik naik maupun turun ketika user menekan tombol “STOP” pada tampilan aplikasi
manual. Berikut adalah tampilan aplikasi pada layer manual.

27
Gambar 3.17 Tampilan aplikasi pada Android menu manual
Pada menu otomatis terdapat tampilan input ketinggian dan pewaktuan yang
harus dimasukkan oleh user. Untuk menjalankan mode otomatis, user harus terlebih
dahulu memasukkan angka angka set point yang diminta pada layer tersebut. Pada set
point user harus memasukkuan input waktu dalam menit dan jarak dalam centimeter.
Data tersebut akan menjadi acuan mikrokontroler dalam melakukan otomatisasi
pengaturan ketinggian dan pewaktuan pada meja. Berikut adalah gambar layer menu
otomatis pada aplikasi smartphone.

28
Gambar 3.18. Tampilan aplikasi Android pada menu otomatis
Setelah data pada menu manual sudah terisi semua,maka untuk memulai
menjalankan mode otomatis, user harus menekan tombol “RUN”. Meja akan bergerak
sampai dengan ketinggian sesuai dengan set point kemudian setelah meja mencapai
ketinggian set point maka akan dilakukan penghitungan pewaktuan. Jika penghitungan
pewaktuan sudah sesuai dengan set point, meja akan kembali bergerak sesuai dengan
ketinggian pada set point baik pada saat posisi duduk maupun berdiri. Meja akan terus
bergerak sesuai dengan ketinggian dan pewaktuan secara berulang sampai mode manual
dimatikan yaitu dengan menekan tombol STOP.
Berikut adalah diagram alir dari program aplikasi user interface android
smartphone.
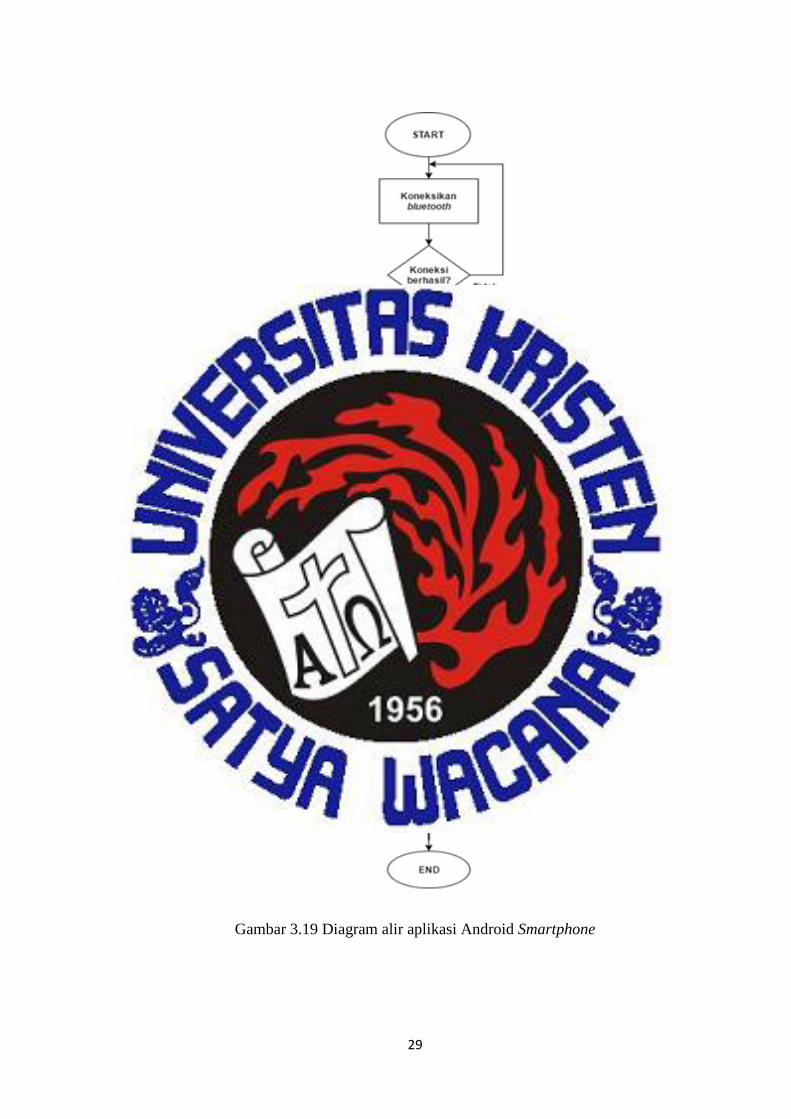
29
Gambar 3.19 Diagram alir aplikasi Android Smartphone