bab i pendahuluan -...
TRANSCRIPT

1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Undang-undang Republik Indonesia Nomor 11 Tahun 2010 pasal 1 tentang
Cagar Budaya menjelaskan bahwa cagar budaya adalah warisan budaya bersifat
kebendaan berupa Benda cagar budaya di darat dan/atau di air yang perlu dilestarikan
keberadaannya karena memiliki nilai penting bagi sejarah, ilmu pengetahuan,
pendidikan, agama, dan/atau kebudayaan melalui proses penetapan. Dalam Undang-
undang Republik Indonesia Nomor 11 Tahun 2010 disebutkan pula bahwa yang disebut
dengan pelestarian adalah upaya dinamis untuk mempertahankan keberadaan cagar
budaya dan nilainya dengan cara melindungi, mengembangkan, dan memanfaatkannya.
Undang-Undang No. 11 pasal 53 ayat 4 juga mengatur bahwa pelestarian cagar
budaya harus didukung oleh kegiatan pendokumentasian sebelum dilakukan kegiatan
yang dapat menyebabkan terjadinya perubahan keasliannya. Pendokumentasian tersebut
tidak hanya terbatas untuk mengetahui dimensi geometri cagar budaya, namun juga
terkait dengan seberapa besar perubahan dimensi geometri yang terjadi dalam rentang
waktu tertentu. Salah satu metode pendokumentasian cagar budaya yang saat ini sedang
mengalami perkembangan adalah metode pemodelan tiga dimensi. Pemanfaatan metode
pendokumentasian dengan pembuatan model tiga dimensi dari benda atau kawasan
cagar budaya memberikan banyak keuntungan di antaranya dapat diperoleh data
dokumentasi yang memiliki bentuk dan dimensi obyek yang teliti dan mudah untuk
disimpan. Oleh karena itu dewasa ini pembuatan model tiga dimensi untuk kepentingan
dokumentasi benda maupun kawasan cagar budaya sangat diperlukan dalam kegiatan
pelestarian sehingga mampu mempertahankan unsur-unsur karya budaya yang ada
dalam keadaan cukup lengkap sedemikian rupa sehingga masih mampu memberikan
gambaran yang utuh tentang cagar budaya yang ada dan mencerminkan nilai-nilai
penting yang dikandungnya (Mulyadi, 2012).

2
Pemanfaatan teknologi Electronic Total Station (ETS) dan 3D Laser Scanner
dalam pemodelan 3D untuk pendokumentasian Kawasan Cagar Budaya, memberikan
ketelitian yang tinggi, namun ke dua teknologi tersebut membutuhkan biaya yang sangat
mahal. Sehingga diperlukan suatu metode alternatif yang dapat digunakan untuk
pemodelan 3D kawasan cagar budaya dengan ketelitian baik dan biaya yang murah,
yaitu menggunakan metode fotogrametri jarak dekat. Fotogrametri Jarak Dekat
merupakan suatu teknik pengukuran tiga dimensi tanpa kontak langsung dengan obyek
dan menggunakan kamera untuk mendapatkan geometri obyek (Cooper & Robson,
1996). Cara pengambilan data pada fotogrametri jarak dekat dibagi menjadi tiga cara,
yaitu pengambilan foto secara terestris, pengambilan foto secara aerial dan dengan
metode kombinasi keduannya.
Pada pelaksanaan tugas akhir ini digunakan metode fotogrametri jarak dekat
kombinasi antara teknik pengambilan data terestris dan aerial untuk pemodelan 3D
kawasan cagar budaya dengan pelaksanaan studi kasus di Kawasan Candi Sambisari
Yogyakarta. Selama ini pemodelan 3D untuk kepentingan dokumentasi lebih banyak
terfokus pada pemodelan benda cagar budaya bukan pada kawasan cagar budaya yang
cakupannya lebih luas. Pekerjaan pemodelan untuk suatu kawasan cagar budaya masih
relatif sedikit dibandingkan pemodelan benda cagar budaya. Berdasarkan karakteristik
dari candi sambisari, maka untuk kepentingan pendokumentasian diperlukan pemodelan
3D dengan cakupan kawasan. Apabila pemodelan hanya mencakup pada obyek candi
sambisari saja maka unsur-unsur karya budaya yang ada dalam kawasan candi tidak bisa
tersimpan dengan lengkap sehingga tidak mampu memberikan gambaran yang utuh
tentang cagar budaya yang ada dikawasan tersebut. Oleh sebab itu proyek tugas akhir ini
dikhususkan untuk pembuatan model 3D Kawasan Candi Sambisari untuk selanjutnya
diharapkan mampu memberikan gambaran utuh terkait benda cagar budaya yang ada
diarea Kawasan Candi Sambisari.
Pemilihan Kawasan Candi Sambisari sebagai Kawasan cagar budaya yang akan
dimodelkan didasarkan pada karakteristik kawasan candi yang unik. Candi Sambisari
berada 6,5 meter lebih rendah dari wilayah sekitarnya. Itu sebabnya, candi Sambisari
3
disebut juga sebagai candi bawah tanah. sebagian ahli arkeologi memperkirakan dulunya
kawasan candi ada di atas permukaan tanah, seperti halnya candi-candi yang lainnya
namun akibat letusan Gunung Merapi di tahun 1006, daerah kawasan candi ini tertutup
oleh bahan-bahan yang berasal dari Gunung Merapi. Candi Sambisari diperkirakan
dibangun antara tahun 812 - 838 M. Kawasan candi terdiri dari sebuah candi induk dan
tiga buah candi pendamping. Terdapat dua pagar yang mengelilingi kawasan candi, satu
pagar telah dipugar sempurna, sementara satu pagar lainnya hanya ditampakkan sedikit
di sebelah timur candi. Masih sebagai pembatas, terdapat delapan buah lingga patok
yang tersebar di setiap arah mata angin. Bangunan candi induk cukup unik karena tidak
mempunyai alas seperti candi di Jawa lainnya. Kaki candi sekaligus berfungsi sebagai
alas sehingga sejajar dengan tanah. Diperkirakan kawasan candi bisa lebih luas jika
diadakan penggalian lebih lanjut, tetapi dikhawatirkan tidak dapat menyalurkan air
untuk dibuang karena posisinya lebih rendah daripada sungai yang ada di sebelah
baratnya.
Pemodelan 3D Kawasan Candi Sambisari dengan cakupan area yang cukup luas
±10.000 m2 memerlukan teknik fotogrametri jarak dekat metode kombinasi antara teknik
pengambilan data terestris untuk pemodelan benda cagar budaya dan aerial untuk
pemodelan kawasan cagar budaya. Diharapkan dengan metode kombinasi ini dapat
membantu mendapatkan data yang tidak bisa terlihat apabila hanya menggunakan salah
satu metode terestris atau aerial saja. Sehingga hasil dari pemodelan 3D ini bisa
dimanfaatkan sebagai salah satu model yang bisa merepresentasikan bentuk dan desain
dari kawasan cagar budaya untuk mendukung upaya pelestarian kawasan cagar budaya
di Yogyakarta.
I.2. Lingkup Kegiatan
Lingkup kegiatan pada tugas akhir ini adalah melakukan pemodelan 3D untuk
Kawasan Cagar Budaya menggunakan metode fotogrametri jarak dekat kombinasi
antara teknik pengambilan data terestris yang terfokus untuk pemodelan 3D obyek Candi
dan data aerial untuk pemodelan 3D Kawasan Candi dengan pelaksanaan studi kasus di

4
Kawasan Candi Sambisari Yogyakarta untuk mendukung upaya pelestarian Kawasan
Cagar Budaya di Yogyakarta. Batasan dari kegiatan ini adalah:
1. Toleransi akurasi dimensi model 3D adalah ±0,1 meter.
2. Model 3D dibentuk secara otomatis dengan software pengolah data dan tidak
dibentuk pemodelan CAD.
I.3. Tujuan
Tugas akhir ini bertujuan untuk pembuatan model 3D untuk Kawasan Cagar
Budaya Candi Sambisari menggunakan metode fotogrametri jarak dekat, dengan
karakteristik khusus adalah kombinasi antara teknik pengambilan data terestris dan
aerial.
I.4. Manfaat
Manfaat yang diharapkan dari kegiatan proyek ini adalah
1. Mendukung upaya pelestarian kawasan cagar budaya di Yogyakarta.
2. Memberikan gambaran situasi Kawasan Candi Sambisari untuk keperluan
dokumentasi cagar budaya.
I.5. Landasan Teori
I.5.1. Perekaman Data dan Pendokumentasian Cagar Budaya
Proses perekaman data, sistem pendokumentasian dan manajemen informasi
merupakan satu kesatuan yang tidak dapat dipisahkan. Rangkaian kegiatan tersebut
digunakan sebagai salah satu usaha pelestarian dan pemeliharaan obyek Benda Cagar
Budaya. Dalam sebuah manajemen informasi dan sistem pendokumentasian obyek
Benda Cagar Budaya perlu melibatkan berbagai multi disiplin ilmu untuk mendapatkan
informasi yang menyeluruh dan lengkap.
Sistem informasi yang menyeluruh dan lengkap dapat dimanfaatkan, antara lain sebagai:

5
a. Sebagai sarana pengetahuan, pemahaman tentang suatu maksud/arti dan nilai-
nilai dari keberadaan suatu benda cagar budaya.
b. Sebagai sarana mempromosikan suatu benda cagar budaya dan pembuatan suatu
manajemen informasi dan perijinan.
c. Sebagai basisdata dalam rangka pemeliharaan dan konservasi jangka panjang.
d. Dapat juga dipertimbangkan sebagai data untuk pembuatan polis asuransi untuk
menanggulangi kerusakan dan kerugian.
e. Sebagai sumber data untuk generasi masa depan.
Sistem pendokumentasian khususnya untuk Benda Cagar Budaya mengalami
perkembangan yang cukup pesat, beberapa perkembangan sistem pendokumentasian
Benda Cagar Budaya antara lain :
a. Sketsa
merekam data/obyek dengan melihat langsung melalui berbagai
keanekaragaman format, kemudian dituangkan dalam bentuk gambar dengan
dimensi dan akurasi yang kurang teliti
b. Hand Survey
Teknik Perekaman dengan mengukur obyek menggunakan tangan, berdasarkan
penilaian dan peralatan sederhana.
c. Fotografi
Teknik Perekaman modern dengan menggunakan alat kamera disertai dengan
metode metode khusus untuk mendapatkan data langsung dari obyek
d. Fotogrametri
Teknik Perekaman obyek dengan teknik pengambilan foto stereo yang saling
bertampalan sehingga membentuk gambar 3 dimensional dan berkoordinat.
I.5.2. Fotogrametri Jarak Dekat
Fotogrametri adalah seni, ilmu dan teknologi dalam memperoleh
informasi yang terpercaya mengenai obyek-obyek dan lingkungan fisis, melalui proses

6
perekaman, pengukuran dan penafsiran citra fotografik dan pola-pola energi
elektromagnetik yang bercahaya dan gejala lainnya (Suharsana, 1997). Lingkup
fotogrametri di luar pemetaan yang menggunakan foto sebagai sarana maupun
fotogrametri sebagai suatu cara adalah fotogrametri jarak dekat. Fotogrametri jarak
dekat dicirikan bahwa jarak antara obyek dan kamera kurang dari 300 meter (Suharsana,
1997).
Istilah fotogrametri jarak dekat digunakan untuk menggambarkan teknik yang
digunakan untuk mengukur suatu obyek dengan jarak kurang dari 100 meter dan posisi
kamera dekat dengan obyek yang diukur. Karakteristik lain yang dimiliki fotogrametri
jarak dekat adalah bahwa foto yang digunakan pada fotogrametri jarak dekat diperoleh
dari hasil pemotretan dengan posisi kamera mengelilingi bahkan berada di dalam obyek
yang dipotret. Posisi sumbu kamera berupa paralel hanya pada kasus tertentu saja, pada
umumnya posisi kamera terhadap obyek sangat konvergen dimana posisi kamera
menunjuk pada tengah obyek yang dipotret. Koordinat titik-titik di permukaan sebuah
obyek dituntut memiliki akurasi homogen yang tinggi di seluruh ruang obyek (Atkinson,
1996).
Hasil dari fotogrametri jarak dekat umumnya dapat tersedia dengan cepat setelah
proses akuisisi gambar atau foto sehingga dapat diproses lebih lanjut terkait dengan
obyek yang diukur dan fungsinya. Koordinat titik-titik pada obyek dapat digunakan
untuk membandingkan obyek yang diukur dengan rancangan, ukuran serta bentuk obyek
yang sebenarnya dalam uji kesesuaian. Selain itu koordinat tersebut dapat dibandingkan
dengan koordinat hasil dari pengukuran sebelumnya untuk mendeteksi adanya deformasi
pada obyek. Pada tindakan lanjutan, pengolahan data fotgrametri jarak dekat
menggunakan komputer grafis, sebagai contoh untuk memproduksi model tiga dimensi
dari sebuah obyek dan dalam beberapa kasus juga menggambarkan dimensi, ketinggian
atau bagian tertentu yang perlu ditampilkan. Karakteristik lain yang dimiliki oleh
fotogrametri jarak dekat adalah beragamnya masalah terkait pengukuran yang dapat
diselesaikan dengan teknik fotogrametri jarak dekat. Di antaranya adalah masalah terkait
jarak kamera, media pencitraan, konfigurasi, prosedur fotogrametris, metode analisis dan

7
bentuk hasil yang harus dipertimbangkan, selain itu juga masalah yang terkait
instrumentasi dan teknik yang akan dipilih dan digunakan dalam setiap kasus tertentu
untuk menghasilkan hasil yang memenuhi spesifikasi yang baik (Atkinson, 1996).
Beberapa kelebihan dari teknik Fotogrametri jarak dekat antara lain (Atkinson,
1980 dalam Danurwendi, 2012) :
1. Fotogrametri jarak dekat merupakan metode yang tidak memerlukan kontak
langsung dengan obyek, sehingga pengukuran dapat dilakukan walaupun
akses langsung tidak memungkinkan. Cakupan dapat berupa keseluruhan
obyek maupun sebagian dari obyek yang diteliti.
2. Akuisisi data dengan menggunakan fotografi dapat dilakukan dengan cepat
dan sesuai.
3. Repetisi untuk evaluasi selalu dimungkinkan.
4. Fotogrametri merupakan teknik yang sangat baik jika metode lain tidak
memungkinkan dilakukan atau tidak efektif dan efisien mengingat
aksesibilitas obyek yang diukur, biaya dan kendala lainnya.
Kekurangan dari teknologi Fotogrametri jarak dekat antara lain (Leitch 2002
dalam Danurwendi, 2012):
1. Hasil pengukuran tidak dapat diperoleh secara langsung mengingat perlu
dilakukan pengolahan dan evaluasi.
2. Kebutuhan akan spesialisasi dan peralatan pendukung yang mahal dapat
mengakibatkan harga yang tinggi dalam implementasi.
3. Kesalahan selama pengambilan dan pengolahan foto dapat menyulitkan
pekerjaan.
Pada dasarnya konsep yang digunakan dalam fotogrametri jarak dekat adalah
konsep fotogrametri analitis yang diaplikasikan pada pemotretan terestris. Prinsip yang
digunakan dalam fotogrametri jarak dekat adalah prinsip kolinearitas (kesegarisan) yang
dapat didefinisikan bahwa titik utama kamera, koordinat titik pada foto, dan posisi 3
dimensi titik tersebut pada ruang berada pada satu garis lurus. Kondisi kolinearitas ini

8
tentu saja digunakan sebagai solusi umum saat orientasi relatif baik secara aerial
maupun terestris.
Gambar I.1 Kondisi kolinearitas (Atkinson, 1996)
Pada foto terestris, sumbu x pada sistem koordinat foto sejajar dengan sumbu X
pada koordinat tanah, sumbu z pada sistem koordinat foto sejajar dengan sumbu Y pada
sistem koordinat tanah, dan sumbu y pada sistem koordinat foto sejajar dengan sumbu Z
pada sisitem koordinat tanah. Hal tersebut yang menyebabkan perbedaan antara foto
udara dan foto terstris. Persamaan kolinearitas untuk titik obyek A dan titik citra a yang
terlihat pada foto dapat ditulis dalam persamaan matriks sebagai berikut (Atkinson,
1996).
[
] = [
] [
] (I.1)
Matriks R merupakan matriks rotasi :
Rω = [
]; Rφ = [
]; Rκ = [
] (I.2)
R = RωRφRκ (I.3)
R =
[
]
c

9
xa - xo= [ ( ) ( ) ( )]
[ ( ) ( ) ( )] (I.4)
ya - yo = [ ( ) ( ) ( )]
[ ( ) ( ) ( )] (I.5)
Keterangan :
xa, ya = koordinat titik A di foto.
xo, yo = koordinat titik pusat foto.
XA, YA, ZA = koordinat titik A di permukaan bumi.
XO, YO, ZO = koordinat pusat kamera.
c = panjang fokus kamera.
rij = elemen matriks rotasi.
Rω = matriks rotasi terhadap sumbu X.
Rφ = matriks rotasi terhadap sumbu Y.
Rκ = matriks rotasi terhadap sumbu Z.
Teknik pengambilan data dalam fotogrametri jarak dekat dapat dilakukan dengan
metode terestris dan metode aerial.
I.5.2.1. Terestrial fotogrametri. Terestrial fotogrametri merupakan teknik
pengambilan gambar dimana foto terestris diambil dari kamera yang diletakkan di atas
permukaan tanah. Posisi dan orientasi seringkali diukur secara langsung saat exposure.
Teknik fotogrametri jarak dekat ini digunakan untuk foto yang diambil secara terestris.
Fotogrametri terestris masih digunakan dalam pemetaan topografi tetapi biasanya untuk
penerapannya terbatas pada daerah yang sempit dan situasi khusus seperti untuk lembah,
pegunungan, pemetaan bangunan, galian-galian pertambangan dan lain sebagainya
Orientasi sudut kamera pada terestrial fotogrametri dapat diukur atau diatur ke
nilai tetap, sehingga semua elemen eksterior foto terestris tidak perlu dihitung.
Parameter orientasi luar merupakan sumber kontrol untuk foto terestris, yaitu untuk

10
mencari titik kontrol dalam ruang obyek. Fotografi terestrial bisa dilakukan secara statis
(foto obyek stasioner) atau dinamis (foto benda bergerak). Untuk fotografi statis, foto
diambil dengan waktu yang lambat, halus, waktu eksposur yang lama. Stereopairs dapat
diperoleh dengan menggunakan kamera tunggal dan membuat eksposur di ke dua ujung
garis dasar. Dalam mengambil foto terestrial dinamis, foto diambil dengan waktu yang
cepat dan kecepatan rana yang cepat. Stereopairs dapat diperoleh dengan menggunakan
dua kamera yang terletak di ujung garis dasar dan harus membuat eksposur yang
simultan.(Wolf, 1983)
I.5.2.2. Aerial fotogrametri. Aerial fotogrametri merupakan teknik pengambilan
gambar pada fotogrametri jarak dekat, dimana foto diambil dari udara dengan bantuan
wahana udara tanpa awak (UAV). Wahana udara tanpa awak atau unmanned aerial
vehicle (UAV) disebut juga unmanned aerial system adalah sistem yang pertama kali
dikenalkan pada perang dunia pertama dan hingga kini telah mengalami banyak
perkembangan baik dalam sektor militer maupun sektor umum. Saat ini penggunaan
UAV dikembangkan dalam navigasi untuk keperluan pemetaan, misalnya pemotretan
udara.
Pemotretan udara pada awalnya menggunakan wahana pesawat terbang dalam
pengambilan datanya, dengan ukuran fisik alat yang besar untuk mobilisasi personil dan
penempatan instrumennya. Penggunaan pesawat terbang berawak akan efektif dan
efisien apabila luas daerah yang akan dipotret lebih besar dari 7500 hektar. Maka untuk
fotogrametri jarak dekat dengan area yang tidak terlalu luas pemotretan udara dengan
wahana pesawat terbang sangat tidak efektif dan efisien, disamping itu biaya oprasional
yang dikeluarkan juga mahal.
Penggunaan wahana udara tanpa awak (UAV) atau aeromodeling adalah solusi
yang tepat untuk akuisisi data foto udara (small format / close range photogrametry).
Keuntungan penggunaan pesawat model dalam pemotretan udara adalah biaya
operasionalnya relatif lebih murah dan mudah didapatkan di pasaran. Sedang
keterbatasan dari pesawat model antara lain adalah pada saat terbang pesawat lebih
mudah terpengaruh oleh cuaca seperti angin dan suhu sehingga pesawat menjadi kurang

11
stabil, selain itu cakupan waktu terbang juga terbatas (berkisar 15 sampai 30 menit).
Oleh karena itu dalam pemaanfaatan pesawat model perlu diketahui karakteristik
terbang pesawat dan kondisi cuaca yang baik sehingga pemotretan udara menjadi efektif
dan efisien serta menghasilkan data foto digital dengan kondisi baik.
Pergerakan pesawat model dalam pemotretan udara menyebabkan variasi
perubahan pada foto udara yang dihasilkan. Pergerakan pesawat model di udara sangat
mudah terpengaruh oleh cuaca seperti angin dan turbelensi. Angin dan turbelensi
mengakibatkan terbang pesawat model tidak stabil. Pergerakan tak terkendali dari
wahana menyebabkan foto yang dihasilkan memiliki pergeseran terhadap sumbu X, Y, Z
dan variasi skala yang besar. Bentuk pergerakan pesawat model dengan foto udara yang
dihasilkan antara lain:
1. Gerakan lift/weight menyebabkan perubahan skala pada foto udara.
2. Gerakan roll pesawat menyebabkan foto udara berotasi terhadap sumbu X / ω
(omega).
3. Gerakan yaw pesawat menyebabkan foto udara berotasi terhadap sumbu Z / κ
(kappa).
4. Gerakan pitch pesawat menyebabkan foto udara berotasi terhadap sumbu Y / φ
(phi).
5. Drag terhadap pesawat membuat pesawat keluar jalur terbang atau terbang
menyamping yang menyebabkan pertampalan foto udara yang tidak maksimal
Berikut ini gambar pergerakan pesawat model dan pengaruh pada foto udara yang
dihasilkan.

12
Gambar I.2. Bentuk-bentuk pergerakan pesawat di udara dan pengaruhnya terhadap foto
yang dihasilkan (Indra, 2012)
I.5.3. Ground sampling distance.
Ground sampling distance atau resolusi spasial adalah ukuran terkecil dari obyek
yang terekam oleh kamera. Panjang dan lebar sensor kamera berpengaruh pada luas
cakupan area yang terpotret. Panjang dan lebar sensor menentukan dalam perhitungan
panjang basis udara untuk memperoleh pertampalan yang diinginkan. Ground sampling

13
distance (GSD) juga dapat diartikan sebagai jarak di atas tanah yang diwakili tiap 1
piksel pada foto udara. Berikut ini rumus untuk memperoleh nilai GSD foto udara:
GSD = resolusi piksel x aSf (I.6.)
atau,
GSD = ( l / jumlah piksel ) x ( Hrata-rata / f ) (I.7.)
dalam hal ini,
aSf : angka skala foto
l : ukuran lebar sensor
Hrata-rata : Tinggi terbang rata – rata
f : fokus kamera
I.5.4.1. Resolusi piksel. Piksel (dari bahasa picture element) merupakan unsur
gambar atau representasi sebuah titik terkecil dalam sebuah gambar grafis yang dihitung
per inchi. Jumlah piksel dalam sensor menentukan tingkat kehalusan foto atau resolusi
yang dihasilkan. Resolusi piksel merupakan ukuran dari 1 buah piksel. Semakin kecil
ukuran sebuah piksel semakin halus gambar yang dihasilkan. Rumus resolusi piksel
adalah sebagai berikut.
Resolusi piksel = panjang sensor / jumlah piksel (I.8.)
I.5.4.2. Skala foto. Skala foto merupakan perbandingan antara jarak antar obyek
di foto dengan jarak obyek yang sama di lapangan. Skala foto dapat juga berupa
perbandingan antara panjang fokus kamera pemotretan dengan tinggi terbang wahana.
Gambar I.7 berikut menunjukkan bentuk geometri foto udara.

14
Gambar I.3. Geometri foto udara tegak
⁄ ( I.9.)
dalam hal ini,
f : panjang fokus kamera
Hrata-rata : tinggi terbang rata-rata
I.5.4.3. Ukuran sensor kamera. Kamera analog menggunakan plat film sebagai
sensor, sedang pada kamera digital sensor yang digunakan berupa plat CCD (Charge
Coupled Device) ataupun CMOS (Complementary Metal Oxide Semiconductor). Ukuran
sensor pada kamera digital non-metrik yang ada saat ini sangat beragam.
I.5.4. Kalibrasi Kamera
Kalibrasi kamera adalah suatu proses yang sangat penting dalam pengukuran
Fotogrametri. Kalibrasi kamera merupakan proses penentuan parameter orientasi dalam
dari sebuah kamera. Sebuah kamera dikatakan telah terkalibrasi apabila parameter
panjang fokus (c), principle point (Xp, Yp), dan distorsi lensa (K1, K2, K3, P1, P2)
telah diketahui.

15
1. Panjang Fokus
Panjang fokus adalah jarak tegak lurus antara titik pusat lensa (titik
fokus) dengan bidang proyeksi kamera (CCD/CMOS) dalam kamera digital
atau film dalam kamera analog. Nilai panjang fokus ini harus diketahui karena
berhubungan dengan pengukuran obyek. Pada beberapa software pengolahan
data, terdapat dua buah nilai panjang fokus hasil kalibrasi kamera yaitu
panjang fokus dalam satuan panjang (mm) dan panjang fokus dalam piksel.
Piksel pada sensor kamera non metrik kualitas rendah memiliki bentuk persegi
panjang sehingga ukuran piksel ke arah x dan y berbeda, hal itu menyebabkan
hasil dari kalibrasi kamera akan menyajikan nilai panjang fokus ke arah x (fx)
dan panjang fokus ke arah y (fy) dalam satuan piksel. Panjang fokus fx
sebenarnya merupakan hasil dari panjang fokus lensa f (dengan satuan
milimeter) dan sx yaitu ukuran dari elemen individu sensor (dengan satuan
piksel/milimeter), sama halnya dengan fy yang diperoleh dari panjang fokus
lensa f dan sy.
2. Titik Pusat Foto / Principle Point.
Principle Point merupakan titik utama hasil proyeksi tegak lurus titik
pusat perspektif (titik pusat proyeksi) pada bidang foto. Titik ini merupakan
titik utama pada sistem koordinat foto.
Gambar I.4. Geometri sebagian orientasi dalam (Abdelhafiz, 2009 dalam Indra
2012).

16
3. Distorsi Lensa
Distorsi menyebabkan tidak tepatnya proyeksi dari pusat perspektif lensa
terhadap bidang foto sehingga letak proyeksinya tidak tepat pada pusat sistem
koordinat foto. Distorsi merupakan ketidaksesuaian bentuk obyek yang ada di
dunia nyata dengan bentuk obyek pada foto. Hal ini disebabkan karena lensa
yang digunakan memiliki kualitas yang kurang baik sehingga terjadi
perubahan arah sinar yang keluar dari lensa dan yang masuk menjadi tidak
sejajar. Distorsi pada lensa meyebabkan kesalahan geometrik atau bentuk
obyek pada foto, namun tidak mengurangi ketajamannya dari hasil pemotretan
kamera. Kesalahan tersebut mengakibatkan adanya penyimpangan geometri
pada foto dengan geometri obyek sebenarnya. Distorsi lensa dibedakan
menjadi dua yaitu distorsi radial dan tangensial (Wolf, 1993).
Distorsi radial adalah pergeseran linier titik foto dalam arah radial
terhadap titik utama dari posisi idealnya. Distorsi lensa biasa diekspresikan
sebagai fungsi polynomial dari jarak radial (Δr) terhadap titik utama foto.
Distorsi radial ke arah luar dianggap positif dan ke arah dalam dianggap
negatif. Distorsi radial ke arah dalam disebut sebagai pinchusion distortion,
dan distorsi radial ke arah luar disebut barrel distortion. Perbedaan keduanya
dapat dilihat pada Gambar I.5.
(a) (b)
Gambar I.5. (a) Pinchusion distortion dan (b) barrel distortion

17
Distorsi radial dideskripsikan sebagai fungsi polinom dari jarak radial
terhadap titik utama foto.
δx = ( ̃ )(
) (I.10)
δy = ( ̃ )(
) (I.11)
dengan nilai r :
r2 = ( ̃ )
( ̃ ) (I.12)
Dimana :
δx, δy = Besar distorsi radial.
K1, K2, K3 = Parameter distorsi radial.
r = Jarak radial.
Distorsi tangensial adalah pergeseran linier titik di foto pada arah
normal (tegak lurus) garis radial melalui titik foto tersebut. Distorsi tangensial
disebabkan kesalahan sentering elemen-elemen lensa dalam satu gabungan
lensa dimana titik pusat elemen-elemen lensa dalam gabungan lensa tersebut
tidak terletak pada satu garis lurus. pergeseran ini biasa dideskripsikan dengan
dua persamaan kuadratik untuk pergeseran pada arah x (δx) dan arah y (δy)
δx = [P1 [ r2
+ 2 ( ̃ – xp)2 ] + 2P2 ( ̃ – xp) ( ̃ – yp)] (1+P3r
2) (I.13)
δy = [2P1( ̃ – xp) ( ̃ – yp) + 2P2( r2
+ 2 ( ̃ – yp)2
)] (1+P3r2) (I.14)
Dimana :
δx = Besarnya pergeseran pada arah x
δy = Besarnya pergeseran pada arah y
P1, P2, P3 = Parameter distorsi tangensial
r = jarak radial

18
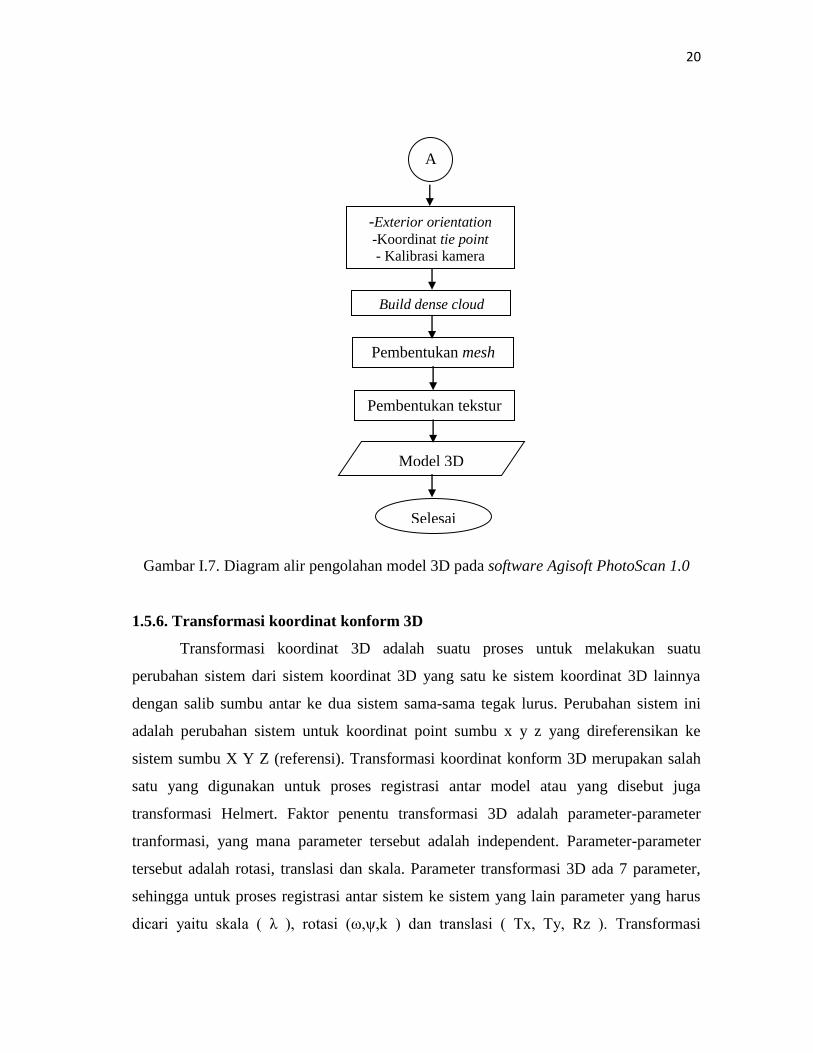
I.5.5. Pembentukan model tiga dimensi
Pada umumnya tujuan akhir dari pengolahan foto dalam fotogrametri jarak dekat
adalah untuk membangun model 3D bertekstur. Prosedur pengolahan foto dan
pembentukan model 3D terdiri dari empat tahap utama.
1.5.6.1 Tahap alignment. Pada tahap ini diawali dengan proses image matching,
serta menemukan posisi kamera untuk setiap gambar dan memasukkan parameter
kalibrasi kamera untuk menghilangkan efek distorsi pada foto. Sehingga sparse point
cloud dan formasi posisi kamera terbentuk. Sparse point cloud merupakan hasil
penyelarasan dari beberapa foto dan tidak akan langsung digunakan dalam prosedur
pembentukan model 3D. Namun dapat diekspor untuk penggunaan lebih lanjut dalam
program eksternal. Misalnya, sparse point cloud dapat digunakan sebagai referensi
dalam pengeditan model 3D. Sebaliknya, untuk formasi posisi kamera diperlukan untuk
proses selanjutnya dalam pembentukan model 3D.
1.5.6.2. Tahap membangun dense point cloud. Dense point cloud merupakan
salah satu metode yang paling sesuai untuk memodelkan obyek yang memiliki tekstur.
Metode ini termasuk metode semi-otomatis karena proses pembentukan point cloud
dapat dilakukan secara otomatis dengan melakukan sedikit pengaturan setelah semua
foto yang diperlukan melalui proses referensing terlebih dahulu. Dengan kemampuan
menghasilkan point cloud yang sangat kecil dan rapat pembentukan model
menghasilkan bentuk yang sesuai dengan keadaan yang sebenarnya. Proses pengolahan
foto dengan metode ini dilakukan secara stereo matching kualitas point cloud yang
dihasilkan sangat bergantung pada proses image matching daerah yang bertampalan
pada foto.
1.5.6.3. Tahap membangun mesh. Prinsip dasar pembentukan mesh adalah
melakukan pembentukan poligon di permukaan obyek berdasarkan titik-titik dense point
cloud. Poligon-poligon tersebut pada umumnya berbentuk segitiga dan segiempat yang
kemudian digabungkan satu sama lain sehingga membentuk suatu permukaan obyek

19
yang solid. Pada perangkat lunak Agisoft PhotoScan poligon yang menyusun permukaan
model 3D disebut face / surface sedangkan titik-titik perpotongan antar poligon yang
membentuk jaring segitiga disebut vertex.
Gambar I.6. Face dan vertex penyusun permukaan model 3D
(http://www.euclideanspace.com/threed/solidmodel/boundary/polygonal/index.htm)
1.5.6.4. Tahap pemberian tekstur pada obyek. Pemberian tekstur ini bisa dilakukan
dengan cara memanggil tekstur dari foto aslinya atau memberikan tekstur yang tersedia
dalam software pengolahan data.
Masukan foto
Align foto
(Otomatisasi identifikasi tie point)
Mulai
A
20
Gambar I.7. Diagram alir pengolahan model 3D pada software Agisoft PhotoScan 1.0
1.5.6. Transformasi koordinat konform 3D
Transformasi koordinat 3D adalah suatu proses untuk melakukan suatu
perubahan sistem dari sistem koordinat 3D yang satu ke sistem koordinat 3D lainnya
dengan salib sumbu antar ke dua sistem sama-sama tegak lurus. Perubahan sistem ini
adalah perubahan sistem untuk koordinat point sumbu x y z yang direferensikan ke
sistem sumbu X Y Z (referensi). Transformasi koordinat konform 3D merupakan salah
satu yang digunakan untuk proses registrasi antar model atau yang disebut juga
transformasi Helmert. Faktor penentu transformasi 3D adalah parameter-parameter
tranformasi, yang mana parameter tersebut adalah independent. Parameter-parameter
tersebut adalah rotasi, translasi dan skala. Parameter transformasi 3D ada 7 parameter,
sehingga untuk proses registrasi antar sistem ke sistem yang lain parameter yang harus
dicari yaitu skala ( λ ), rotasi (ω,ψ,k ) dan translasi ( Tx, Ty, Rz ). Transformasi
-Exterior orientation -Koordinat tie point
- Kalibrasi kamera
Build dense cloud
Selesai
Pembentukan mesh
Pembentukan tekstur
Model 3D
A

21
koordinat konform tiga dimensi meliputi perubahan dari suatu sistem tiga dimensional
ke sistem lainnya. Transformasi konform 3D merupakan sebuah transformasi yang
mempertahankan faktor skala sama pada semua arah, trasformasi ini banyak digunakan
untuk kepentingan transformasi model. Transformasi konform akan mempertahankan
bentuk model yang ditransformasi sehingga tidak terjadi perubahan sudut obyek.
Model yang berada dalam sebuah chunk (subproject dalam perangkat lunak
Agisoft Photoscan) pada registrasi model 3D memiliki sistem koordinat lokal masing-
masing, sehingga setiap tie point pada pada model memiliki sistem koordinat yang
sesuai dengan chunk. Proses registrasi antar chunk yang saling berdekatan harus
memiliki acuan target yang sama dalam arti adalah posisi target sebagai tie point yang
sama. Kesamaan posisi acuan target untuk proses registrasi bisa ditentukan dengan
transformasi koordinat 3D yang akan memeperoleh nilai parameter-parameter antar ke
dua sistem acuan tersebut. Salah satu dari chunk tersebut harus dijadikan sebagai
koordinat acuan (referensi) sebagai acuan bagi chunk lainnya.
Transformasi konform model 3D antara suatu model dengan sistem koordinat XB,
YB, ZB dan model lain dengan sistem koordinat XA,YA, ZA dapat dilihat pada persamaan
dibawah ini :
(I.15)
Dimana :
XB, YB, ZB = koordinat model B
XA,YA, ZA = koordinat model A
s = faktor skala
R = parameter rotasi (ω,φ,k)
Tx,Ty, Tz = parameter translasi.

22
Gambar I.8. Transformasi koordinat konform 3D
(http://www.gmat.unsw.edu.au/snap/gps/gps_survey/chap11/1113.htm)