rancang bangun mobil remote kontrol …eprints.ums.ac.id/55323/13/naskah publikasi-111.pdf ·...
TRANSCRIPT

i
SIMULASI PEMROGRAMAN SISTEM PENGENDALI KECEPATAN PADA
RANCANG BANGUN MOBIL REMOTE KONTROL MENGGUNAKAN PWM
BERBASIS SENSOR ULTRASONIK HC-SR04 DAN MIKROKONTROLER ARDUINO
Disusun sebagai salah satu syarat menyelesaikan
Program Studi Magister Teknik Mesin Sekolah Pascasarjana
Oleh :
DWI AJI SAPUTRA
NIM. U100140013
PROGRAM STUDI MAGISTER TEKNIK MESIN
SEKOLAH PASCASARJANA
UNIVERSITAS MUHAMMADIYAH SURAKARTA
2017

ii
HALAMAN PERSETUJUAN
SIMULASI PEMROGRAMAN SISTEM PENGENDALI KECEPATAN PADA RANCANG BANGUN MOBIL REMOTE KONTROL MENGGUNAKAN PWM
BERBASIS SENSOR ULTRASONIK HC-SR04 DAN MIKROKONTROLER ARDUINO
PUBLIKASI ILMIAH
Oleh : DWI AJI SAPUTRA NIM : U 100 140 013
Telah diperiksa dan disetuji untuk diuji oleh :
Pembimbing I Pembimbing II
Ir. Bana Handaga, M.T., Ph.D. Marwan Effendy,S.T.,M.T.,Ph.D
iii
HALAMAN PENGESAHAN
SIMULASI PEMROGRAMAN SISTEM PENGENDALI KECEPATAN PADA RANCANG BANGUN MOBIL REMOTE KONTROL MENGGUNAKAN PWM
BERBASIS SENSOR ULTRASONIK HC-SR04 DAN MIKROKONTROLER ARDUINO
Oleh
DWI AJI SAPUTRA
NIM: U 100 140 013
Telah dipertahankan di depan Dewan Penguji
Program Studi Magister Teknik Mesin Sekolah Pascasarjana Universitas Muhammadiyah Surakarta
Pada hari Kamis tanggal 27 Juli 2017 dan dinyatakan telah memenuhi syarat untuk diterima
Dewan Penguji
1. Ir.Bana Handaga, M.T.,Ph.D. ( ) ( Ketua Dewan Penguji )
2. Marwan Effendy, S.T.,M.T.,Ph.D. ( ) (Anggota Dewan Penguji I)
3. Fajar Suryawan, S.T.,M.EngSc.,Ph.D. ( ) (Anggota Dewan Penguji II)
Surakarta, Agustus 2017 Direktur Sekolah Pascasarjana
Prof.Dr.Bambang Sumardjoko

iv
PERNYATAAN PUBLIKASI
Yang bertanda tangan di bawah ini, saya :
Nama : Dwi Aji Saputra
NIM : U 100 140 013
Program Studi : Magister Teknik Mesin
Konsentrasi : Otomatisasi
Judul : Simulasi Pemrograman Sistem Pengendali Kecepatan pada
Rancang Bangun Mobil Remote Kontrol Menggunakan PWM
Berbasis Sensor Ultrasonik HC-SR04 dan Mikrokontroler
Arduino.
Dengan ini menyatakan bahwa dalam naskah publikasi ini tidak terdapat karya yang pernah
diajukan untuk memperoleh gelar kesarjanaan di Perguruan tinggi dan sepanjang pengetahuan
saya juga tidak terdapat karya atau pendapat yang pernah ditulis atau diterbitkan orang lain,
kecuali secara tertulis diacu dalam naskah dan disebutkan dalam daftar pustaka.
Apabila kelak terbukti ada ketidakbenaran dalam pernyataan saya diatas, maka akan saya
pertanggung jawabkan sepenuhnya.
Surakarta, Agustus 2017
Penulis
DWI AJI SAPUTRA NIM : U 100 140 013

v
SIMULASI PEMROGRAMAN SISTEM PENGENDALI KECEPATAN PADA RANCANG BANGUN MOBIL REMOTE CONTROL
MENGGUNAKAN PWM BERBASIS SENSOR ULTRASONIK HC-SR04 DAN MIKROKONTROLER ARDUINO
Abstrak : Teknologi transportasi dengan menggunakan energi listrik semakin berkembang,
ditandai dengan pesatnya pembuatan mobil listrik menggunakan motor sebagai
penggerak roda yang bermanfaat mengurangi penggunaan bahan bakar minyak.
Sistem keselamatan pada kendaraan merupakan hal penting yang harus
diperhatikan, hal ini mendorong penulis untuk membahas sistem pengendali
kecepatan untuk berhenti otomatis pada mobil listrik untuk mengurangi adanya
kelalaian pengereman pengemudi. Prototipe pengendali kecepatan berhenti
otomatis pada mobil remote control (RC) ini memiliki karakteristik sistem
penggerak motor DC yang serupa pada mobil listrik, namun pada alat disertai
sensor jarak ultrasonik dan mikrokontroler arduino sebagai alat kontrol otomatis
utama. Sinyal PWM (pulse width modulation) dari mikrokontroler digunakan
untuk mengatur kecepatan motor DC sebagai penggerak utama kendaraan.
Prototipe ini selanjutnya diuji untuk mendapatkan grafik data percepatan PWM 64
jarak 1m, 127 jarak 3m, 191 jarak 4m, 225 jarak 5m, di mana hasil penelitian
menunjukan bahwa sensor ultrasonik dapat mendeteksi jarak penghalang 2cm-
500m dan bahasa C (coding) mampu dibaca dengan baik oleh mikrokontroler
arduino disertai mampu mengontrol kecepatan sebuah motor DC pada alat
pendeteksi jarak. Tampilan jarak antara kendaraan dan penghalang dapat dilihat
pada LCD dan buzzer yang digunakan sebagai indikator jarak aman.
Kata-kata kunci: pengendali kecepatan otomatis, mobil RC, motor DC, Arduino,
sensor jarak ultrasonik.
Abstract
Transportation technology using electrical energy becomes more developed. with
the rapid manufacture of electric car using the motor as the driving wheel that is
beneficial to reduce the use of fuel oil. Safety systems on the vehicle are important
things that must be considered, this prompted the authors to discuss the automatic
braking system on electric cars to reduce their braking the driver's negligence.
The prototype automatic braking on the car remote control (RC) has the
characteristics of a motor DC drive systems are similar, accompanied ultrasonic
sensor distance and microcontroller arduino as a main automatic control device.
Signal pulse widht modulation (PWM) of the microcontroller is used to control
the speed of a motor DC as prime mover vehicle. The prototype is then tested to
obtain the data graph where research results show that the ultrasonic sensor and
microcontroller works well and is accurate to a distance detector and sensor
control. Display distance between vehicles and obstructions can be seen on the
LCD and buzzer are used as an indicator of a safe distance.
Keywords: automatic braking, electric car control, DC motor, Arduino, ultrasonic
distance sensor.

1
1. PENDAHULUAN
Perkembangan dunia otomotif sekarang semakin meningkat termasuk semakin banyak
pembuatan mobil listrik. Kendaraan listrik merupakan salah satu jalan keluar atas masalah
polusi udara, karena kendaraan listrik sumber tenaganya dari baterai atau sering disebut aki,
sehingga kendaraan ini sangat ramah lingkungan atau bisa dibilang “zero emission”, hal ini
dapat mengurangi kadar CO2 dan sejenisnya diudara sebagai bahan kimia yang menyebabkan
global warming, (Zainuri, 2015).
Mobil listrik yang nyaman dan cepat merupakan impian dari semua pengguna, namun mobil
listrik yang digunakan pada saat ini masih memiliki sistem pengereman secara manual dengan
sistem pengereman regeneratif atau istilahnya sebuah sistem pengereman dengan tujuan
mengkonversikan sistem energi mekanis gaya gesek pada suatu rem menjadi bentuk energi lain
yang dapat disimpan pada baterai untuk digunakan kembali pada saat dibutuhkan,
(Trisnaningtyas, 2012).
Seiring dengan semakin tingginya kecepatan maka resiko akan terjadinya kecelakaan juga
semakin tinggi. Pada pertumbuhan pembuatan mobil listrik, bukan hanya teknologi mesin dan
pengguna sumber daya listrik yang semakin diperbaiki tetapi juga mobil listrik yang dibuat
harus mempunyai tingkat keamanan berkendara yang juga semakin baik. Braking distance
adalah jarak yang dibutuhkan kendaraan untuk berhenti total sejak dari pengendara
mengoperasikan rem. Bila kecepatan kendaraan semakin cepat maka braking distance yang
dibutuhkan semakin panjang, (Evans, 2011).
Kebanyakan dari jurnal studi kasus untuk sistem pengendali kecepatan otomatis ini masih
menggunakan mikrokontroler AVR Atmega, artinya Atmega masih berbentuk chip yang belum
mempunyai memori dan board, perlu bahan lain untuk mensuport penulisan di mikorokontroler
AVR Atmega. Beda halnya dengan mikrokontroler Arduino yang sudah menjadi satu dalam
sebuah board yang nantinya pengguna tinggal membuat bahasa program dan menghubungkan
setiap input outputnya. Sinyal pwm digunakan untuk mengatur kecepatan motor DC, pengujian
yang dilakukan menggunakan mikrokontroler Atmega8535, (Anggoro, 2014).
Metode pwm dapat digunakan untuk mengatur kecepatan motor dan untuk menghindarkan
rangkaian mengkomsumsi daya berlebih. Pwm dapat mengatur kecepatan motor karena
tegangan yang diberikan dalam selang waktu tertentu saja, (Arifin, 2014),
Sistem otomatisasi pengendali motor DC secara elektris yang digunakan sebagai referensi
system keamanan mobil listrik telah dirancang menggunakan sensor ultrasonik jenis ping
sebagai parameter tegangan yang diterima motor DC. Pengendalian kecepatan menggunakan 2
metode yaitu secara dinamis dan secara plugging. Pengereman secara dinamis membuat motor
listrik berfungsi sebagai generator, gaya gerak listrik yang ditimbulkan pada belitan jangkar
dibebani dengan resistor, jadi energi pengereman terbuang sebagai panas pada resistor tersebut.
Pengereman secara plugging dilakukan pembalikan polaritas tegangan pada jangkar atau pada
penguat medan, karena dengan cara ini motor cepat berhenti berputar, malah cenderung berbalik
arah, (Khuamedi, 2014).
Hubungan antara kecepatan motor dengan tegangan terminal adalah berbanding lurus,
sehingga semakin kecil tegangan maka kecepatan motor semakin menurun. Keuntungan
mengendalikan kecepatan motor DC dengan pwm adalah praktis dan ekonomis dalam
penerapanya, (Anggoro, 2014).
Metode yang digunakan penelitian ini adalah action research, yaitu bertujuan untuk
mengembangkan pendekatan baru dalam pemecahan masalah dengan penerapan langsung di
dunia nyata, (Hasibuan, 2007).
Pada penelitian ini akan menggunakan alat kontrol utama mikrokontroler Arduino UNO dan
sensor ultrasonik HC-SR04. Penelitian membahas perancangan sebuah prototipe pengendali
kecepatan otomatis untuk mobil listrik yang disimulasikan pada mobil remote control yang di
2
asumsikan akan dioperasikan pada pedal rem, sebab mobil RC memiliki karakteristik penggerak
elektronik yang serupa. Pengendalian kecepatan otomatis dirancang dengan ide bila alat melaju
pada kecepatan yang ditentukan kemudian pada jarak yang ditentukan terdapat sebuah
penghalang, maka arduino dan pwm akan mengurangi kecepatannya otomatis secara bertahap
(mengendalikan pedal rem) dan kemudian berhenti bila jarak sudah semakin dekat.
1.1 DASAR TEORI a. Mikrokontroler
Mikrokontroler adalah IC atau sebuah chip yang dapat diprogram berulang kali, baik ditulis
atau dihapus pada sebuah software pemograman. Biasanya digunakan untuk pengontrolan pada
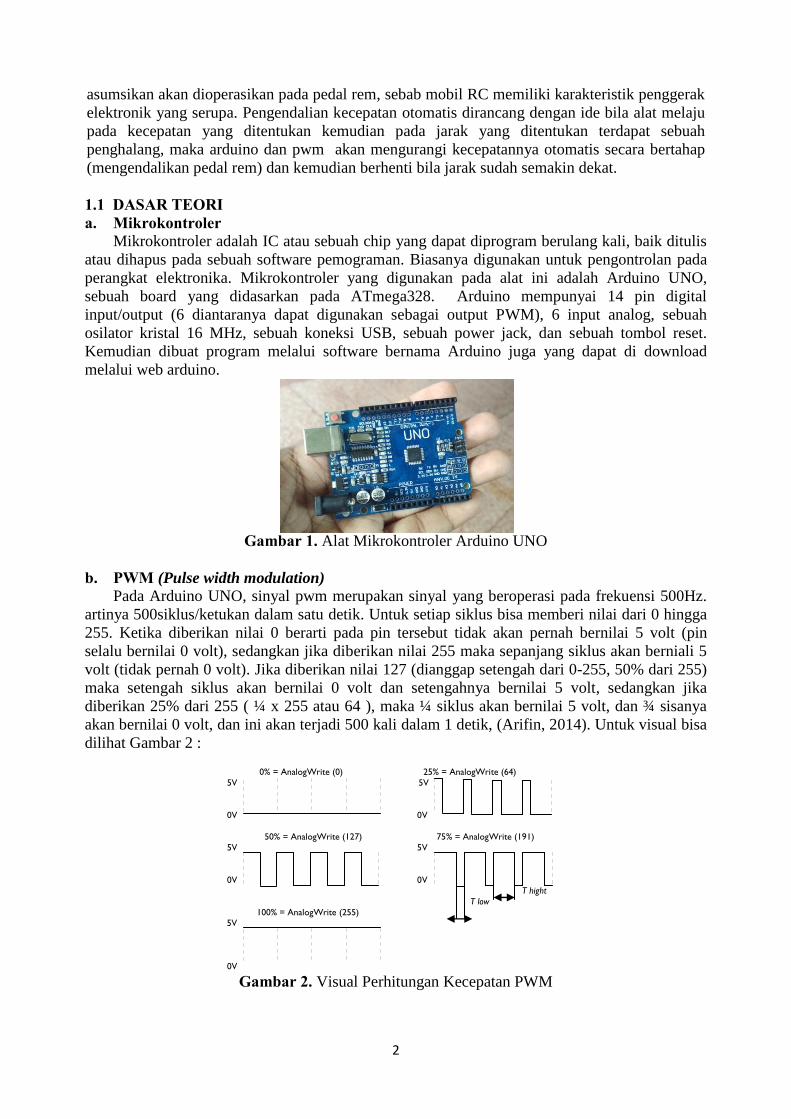
perangkat elektronika. Mikrokontroler yang digunakan pada alat ini adalah Arduino UNO,
sebuah board yang didasarkan pada ATmega328. Arduino mempunyai 14 pin digital
input/output (6 diantaranya dapat digunakan sebagai output PWM), 6 input analog, sebuah
osilator kristal 16 MHz, sebuah koneksi USB, sebuah power jack, dan sebuah tombol reset.
Kemudian dibuat program melalui software bernama Arduino juga yang dapat di download
melalui web arduino.
Gambar 1. Alat Mikrokontroler Arduino UNO
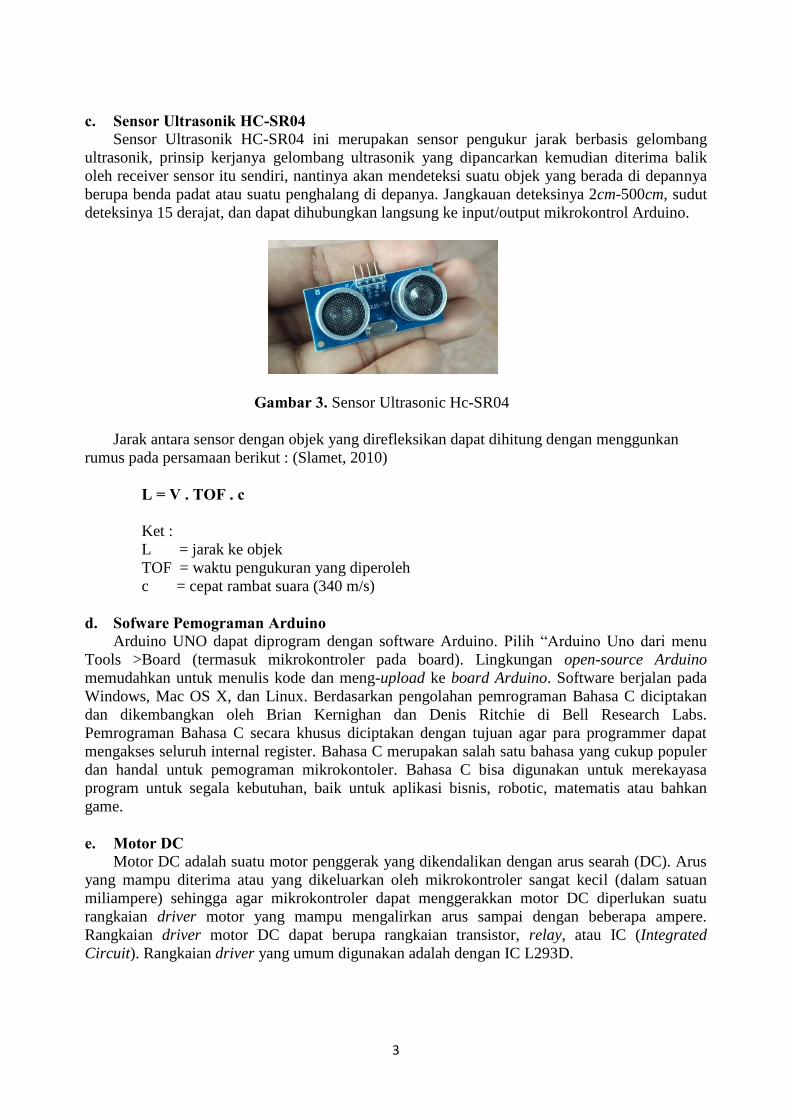
b. PWM (Pulse width modulation) Pada Arduino UNO, sinyal pwm merupakan sinyal yang beroperasi pada frekuensi 500Hz.
artinya 500siklus/ketukan dalam satu detik. Untuk setiap siklus bisa memberi nilai dari 0 hingga
255. Ketika diberikan nilai 0 berarti pada pin tersebut tidak akan pernah bernilai 5 volt (pin
selalu bernilai 0 volt), sedangkan jika diberikan nilai 255 maka sepanjang siklus akan berniali 5
volt (tidak pernah 0 volt). Jika diberikan nilai 127 (dianggap setengah dari 0-255, 50% dari 255)
maka setengah siklus akan bernilai 0 volt dan setengahnya bernilai 5 volt, sedangkan jika
diberikan 25% dari 255 ( ¼ x 255 atau 64 ), maka ¼ siklus akan bernilai 5 volt, dan ¾ sisanya
akan bernilai 0 volt, dan ini akan terjadi 500 kali dalam 1 detik, (Arifin, 2014). Untuk visual bisa
dilihat Gambar 2 :
0% = AnalogWrite (0) 25% = AnalogWrite (64)
5V 5V
0V 0V
50% = AnalogWrite (127) 75% = AnalogWrite (191)
5V 5V
0V 0V
T hight
T low
100% = AnalogWrite (255) 5V
0V
Gambar 2. Visual Perhitungan Kecepatan PWM
3
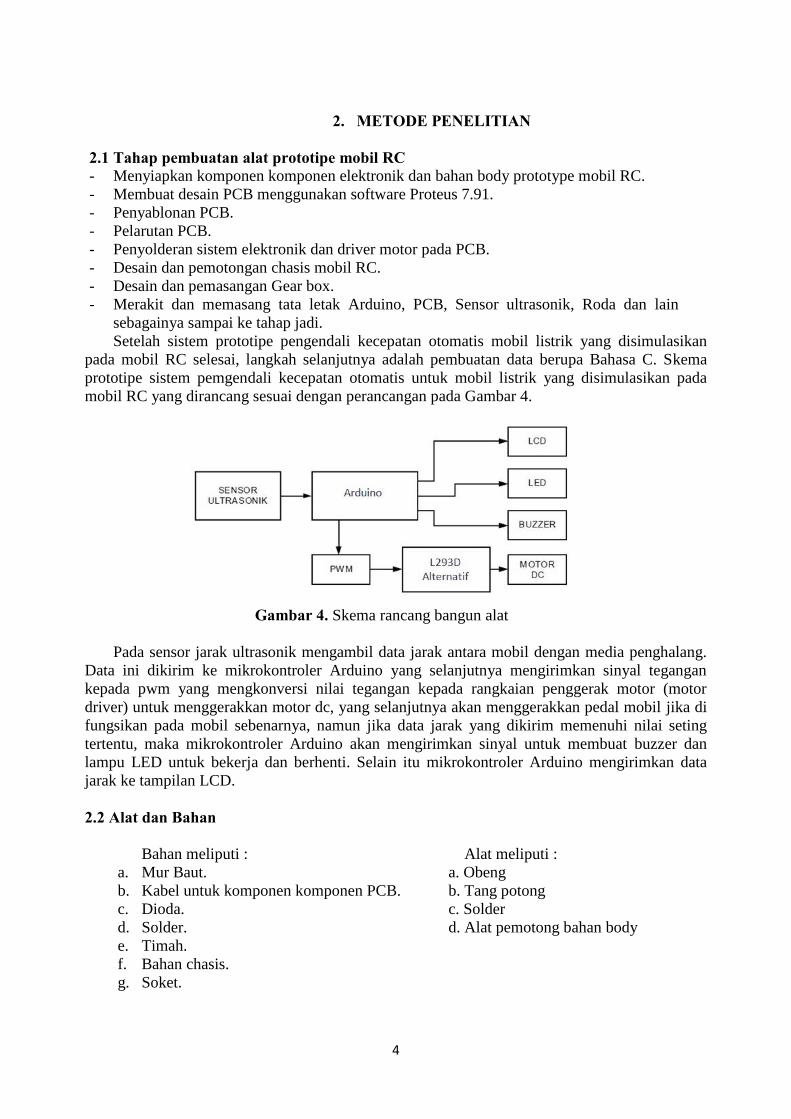
c. Sensor Ultrasonik HC-SR04 Sensor Ultrasonik HC-SR04 ini merupakan sensor pengukur jarak berbasis gelombang
ultrasonik, prinsip kerjanya gelombang ultrasonik yang dipancarkan kemudian diterima balik
oleh receiver sensor itu sendiri, nantinya akan mendeteksi suatu objek yang berada di depannya
berupa benda padat atau suatu penghalang di depanya. Jangkauan deteksinya 2cm-500cm, sudut
deteksinya 15 derajat, dan dapat dihubungkan langsung ke input/output mikrokontrol Arduino.
Gambar 3. Sensor Ultrasonic Hc-SR04
Jarak antara sensor dengan objek yang direfleksikan dapat dihitung dengan menggunkan
rumus pada persamaan berikut : (Slamet, 2010)
L = V . TOF . c
Ket :
L = jarak ke objek
TOF = waktu pengukuran yang diperoleh
c = cepat rambat suara (340 m/s)
d. Sofware Pemograman Arduino Arduino UNO dapat diprogram dengan software Arduino. Pilih “Arduino Uno dari menu
Tools >Board (termasuk mikrokontroler pada board). Lingkungan open-source Arduino
memudahkan untuk menulis kode dan meng-upload ke board Arduino. Software berjalan pada
Windows, Mac OS X, dan Linux. Berdasarkan pengolahan pemrograman Bahasa C diciptakan
dan dikembangkan oleh Brian Kernighan dan Denis Ritchie di Bell Research Labs.
Pemrograman Bahasa C secara khusus diciptakan dengan tujuan agar para programmer dapat
mengakses seluruh internal register. Bahasa C merupakan salah satu bahasa yang cukup populer
dan handal untuk pemograman mikrokontoler. Bahasa C bisa digunakan untuk merekayasa
program untuk segala kebutuhan, baik untuk aplikasi bisnis, robotic, matematis atau bahkan
game.
e. Motor DC Motor DC adalah suatu motor penggerak yang dikendalikan dengan arus searah (DC). Arus
yang mampu diterima atau yang dikeluarkan oleh mikrokontroler sangat kecil (dalam satuan
miliampere) sehingga agar mikrokontroler dapat menggerakkan motor DC diperlukan suatu
rangkaian driver motor yang mampu mengalirkan arus sampai dengan beberapa ampere.
Rangkaian driver motor DC dapat berupa rangkaian transistor, relay, atau IC (Integrated
Circuit). Rangkaian driver yang umum digunakan adalah dengan IC L293D.
4
2. METODE PENELITIAN
2.1 Tahap pembuatan alat prototipe mobil RC - Menyiapkan komponen komponen elektronik dan bahan body prototype mobil RC. - Membuat desain PCB menggunakan software Proteus 7.91. - Penyablonan PCB. - Pelarutan PCB. - Penyolderan sistem elektronik dan driver motor pada PCB. - Desain dan pemotongan chasis mobil RC. - Desain dan pemasangan Gear box. - Merakit dan memasang tata letak Arduino, PCB, Sensor ultrasonik, Roda dan lain
sebagainya sampai ke tahap jadi. Setelah sistem prototipe pengendali kecepatan otomatis mobil listrik yang disimulasikan
pada mobil RC selesai, langkah selanjutnya adalah pembuatan data berupa Bahasa C. Skema
prototipe sistem pemgendali kecepatan otomatis untuk mobil listrik yang disimulasikan pada
mobil RC yang dirancang sesuai dengan perancangan pada Gambar 4.
Gambar 4. Skema rancang bangun alat
Pada sensor jarak ultrasonik mengambil data jarak antara mobil dengan media penghalang.
Data ini dikirim ke mikrokontroler Arduino yang selanjutnya mengirimkan sinyal tegangan
kepada pwm yang mengkonversi nilai tegangan kepada rangkaian penggerak motor (motor
driver) untuk menggerakkan motor dc, yang selanjutnya akan menggerakkan pedal mobil jika di
fungsikan pada mobil sebenarnya, namun jika data jarak yang dikirim memenuhi nilai seting
tertentu, maka mikrokontroler Arduino akan mengirimkan sinyal untuk membuat buzzer dan
lampu LED untuk bekerja dan berhenti. Selain itu mikrokontroler Arduino mengirimkan data
jarak ke tampilan LCD.
2.2 Alat dan Bahan
Bahan meliputi : Alat meliputi :
a. Mur Baut. a. Obeng
b. Kabel untuk komponen komponen PCB. b. Tang potong
c. Dioda. c. Solder
d. Solder. d. Alat pemotong bahan body
e. Timah.
f. Bahan chasis.
g. Soket.

5
h. Push bottom.
i. Batrei Lippo.
Prototipe meliputi :
Gamabar 5. Prototipe simulasi pengendali kecepatan otomatis mobil listrik yang
disimulasikan pada mobil RC menggunakan sensor ultrasonik HC-SR04 yang
dikontrol oleh mikrokontroler arduino.
Gambar 6. Proses sinkron pemograman perintah bahasa C
Setelah melelaui proses pembuatan prototipe alat sistem pengendali kecepatan otomatis, tentu
dalam melakukan pembuatan tidak hanya membuat kemudian siap jalan, tentu ada tahapan alat
tersebut harus diprogram agar dapat berhenti otomatis pada jarak yang ditentukan dengan
menggunakan bahasa C, kemudian bahasa program diinstall dan dianalisis agar mendapatkan data
pendukung yang di inginkan dalam penelitiana ini, maka dari berbagai tahapan dan pengujian
pada alat penelitian ini didapatkan suatu data dan program bahasa C yang saya buat bersama salah
satu ahli robotik di bantul, kemudian setelah tahap kelola perancangan selesai langkah pengolahan
data dimulai dengan mencatat data hasil analisis yang berupa data percepatan pwm dan jarak
penghalang dalam sebuah tampilan tabel dalam program excel. Dari program excel ditampilkan ke
dalam sebuah grafik yang kemudian digabungkan hubungan antara variasi kecepatan motor pwm
dan jarak penghalang ketika berhenti.
Arduino USB
IC 1
X1
To Leptop

6
100
300
400
500
98
295
396
496
0
100
200
300
400
500
600
100 300 400 500
Jara
k cm
Jarak (cm)
Menggunakan Meteran
Di baca sensor Ultrasonik
3. HASIL DAN PEMBAHASAN
Pengambilan data jarak dilakukan dengan cara prototipe diposisikan pada ruang terbuka,
kemudian pada jarak pertama data yang diambil adalah jarak media penghalang diposisi 100cm,
sensor ultrasonik membaca jarak yaitu 98cm. Ke dua pada data jarak media penghalang diposisi
300cm, sensor membaca 295cm. Ke tiga pada jarak media penghalang 400cm, sensor membaca
396cm. Ke empat pada jarak media penghalang 500cm, sensor membaca 496cm. Adapun ilustrasi
pengambilan data jarak sensor ultrasonik dapat dilihat pada Gambar 7 :
Gambar 7. Ilustrasi pengambilan data jarak pada sensor ultrasonik
Gambar 8. Hasil perbandingan pengukuran jarak
Dari pengambilan data pada Gambar 7 dan Gambar 8 mendapatkan hasil bahwa sensor
ultrasonik HC-SR04 mampu mengukur jarak mulai dari 100cm sampai dengan 500cm (5m).
Angka yang ditampilkan pada LCD terdapat selisih dengan jarak sebenarnya yaitu 2-5cm. (Zulmi,

7
2014), Meneliti persentase kesalahan jarak yang diukur oleh sensor ultrasonik yaitu sebesar 1cm
dari setiap jarak yang diukur dengan mistar. Adapun selisih jarak pada alat ini dipengaruhi oleh
beberapa faktor yang dapat mengurangi keakuratan pengukuran jarak, diantaranya adalah
karakteristik penghalang yang berada di samping suatu sensor, karena sensor pantul ultrasonik
yang dikirim dan diterima langsung memiliki sudut tangkap tertentu disetiap jarak objek yang
berada di depan, kemudian juga objek cara meletakan Sensor Ultrasonik HC-SR04, di mana
sensor agak menjuru kedalam jadi body atas dan bawah sedikit menghalangi sudut pamancar
sensor, mungkin hal ini bisa diteliti lebih lanjut buat bahan penelitian selanjutnya.
Sebuah riset menganalisa karakteristik frekuensi sensor SRF05 telah diuji untuk memicu
kecepatan tangkap sensor. Hal ini memungkinkan untuk memicu sensor pada tingkat yang lebih
cepat ditangkap oleh sebuah aplikasi, jarak yang diketahui hanya 33cm, (Wickramasooriya, 2000).
Secara teori, sensor ultrasonik HC-SR04 pada penelitian ini dapat bekerja dengan baik sesuai
dengan spesifikasi dari sensor ultrasonik HC-SR04 yaitu dapat mengukur jarak mulai dari jarak
minimum 1cm sampai dengan jarak maksimum 5m. Namun penelitian yang dilakukan (Zulmi,
2014) jarak yang hanya dapat dijangkau hanya 2cm-30cm.
Pada alat prototipe penelitian ini dapat dihitung nilai RPM dan kecepatan (km/jam) setiap
pwm yang diberikan, yaitu ada 4 kecepatan pwm yang ditentukan. Maka dapat dihitung dengan
rumus di mana v adalah linear velocity (km/h), r adalah radius (cm), dan ω adalah
angular velocity (rpm). Diketahui keliling roda 3cm, dan rpm pada motor yang di gunakan 6000
dan hasilnya dapat dilihat pada Tabel 1.
Tabel 1. Hasil perhitungan RPM dan kecepatan (km/jam) yang diberikan suplai nilai PWM
PWM% RPM Km/h 0% 0 0 km/h
64 (25%) 1500 5,6 km/h
127 (50%) 3000 11,3 km/h
191 (75%) 4500 16,9 km/h
255 (100%) 6000 22,6 km/h
Pengujian selanjutnya yaitu pengujian bahasa mikrokontroler arduino uno, di mana pengujian
ini hanya diambil sebagian dari keseluruhan data program aplikasi yang akan diinstall pada
mikrokontroler arduino agar program data yang diinginkan bisa membuat kendaraan berhenti
sempurna, untuk data program bahasa c dapat dilihat dilembar lampiran. Ada empat kecepatan
pwm dan jarak yang diterapkan dalam program ini agar alat berhenti pada jarak yang ditentukan
yaitu pwm 64 jarak 100cm, pwm 127 jarak 300cm, pwm 191 jarak 400cm dan pwm 255 jarak
500cm, namun dari setiap pwm dan jarak yang diterapkan terdapat dua tahap penurunan pwm
dengan waktu sekian milidetik agar jika di terapkan pada kendaraan sungguhan alat ini berfungsi
mengendalikan pedal rem secara perlahan layaknya pengemudi ketika menginjak pedal rem tidak
langsung secara dalem tapi secara pelan-pelan. Untuk mengetahui berapa waktu (ms) pada saat
arduino mengontrol untuk menurunkan pwm sampai dengan berhenti, maka waktu yang terjadi
dapat dilihat pada Gambar 9, 10, 11, dan 12 di mana sebelumnya data waktu telah diketahui dari
Serial Monitor arduino.

8
Gambar 9. Kontrol waktu terhadap pwm 64 jarak 100cm.
Gambar 10. Kontrol waktu terhadap pwm 127 jarak 300cm.
Gambar 11. Kontrol waktu terhadap pwm 191 jarak 400cm.
126 123 120 117 114 111 108 105 103 100
100
100
0
10
20
30
40
50
60
70
PW
M
Waktu (ms)
(cm)
329 325 321 319 315 312 309 306 304 300
300
300
0
20
40
60
80
100
120
140
PW
M
Waktu (ms)
(cm)
423 421 418 416 413 411 409 407 402 400
400
400
0
50
100
150
200
250
PW
M
Waktu (ms)
(cm)
9
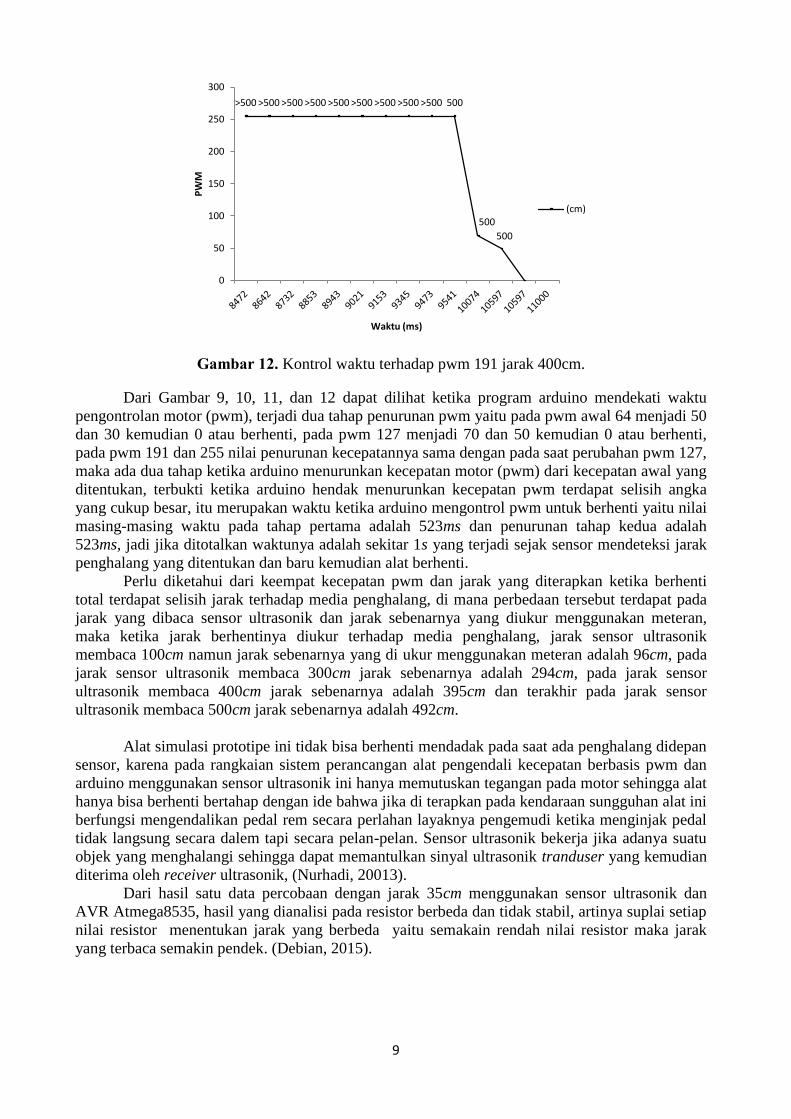
Gambar 12. Kontrol waktu terhadap pwm 191 jarak 400cm.
Dari Gambar 9, 10, 11, dan 12 dapat dilihat ketika program arduino mendekati waktu
pengontrolan motor (pwm), terjadi dua tahap penurunan pwm yaitu pada pwm awal 64 menjadi 50
dan 30 kemudian 0 atau berhenti, pada pwm 127 menjadi 70 dan 50 kemudian 0 atau berhenti,
pada pwm 191 dan 255 nilai penurunan kecepatannya sama dengan pada saat perubahan pwm 127,
maka ada dua tahap ketika arduino menurunkan kecepatan motor (pwm) dari kecepatan awal yang
ditentukan, terbukti ketika arduino hendak menurunkan kecepatan pwm terdapat selisih angka
yang cukup besar, itu merupakan waktu ketika arduino mengontrol pwm untuk berhenti yaitu nilai
masing-masing waktu pada tahap pertama adalah 523ms dan penurunan tahap kedua adalah
523ms, jadi jika ditotalkan waktunya adalah sekitar 1s yang terjadi sejak sensor mendeteksi jarak
penghalang yang ditentukan dan baru kemudian alat berhenti.
Perlu diketahui dari keempat kecepatan pwm dan jarak yang diterapkan ketika berhenti
total terdapat selisih jarak terhadap media penghalang, di mana perbedaan tersebut terdapat pada
jarak yang dibaca sensor ultrasonik dan jarak sebenarnya yang diukur menggunakan meteran,
maka ketika jarak berhentinya diukur terhadap media penghalang, jarak sensor ultrasonik
membaca 100cm namun jarak sebenarnya yang di ukur menggunakan meteran adalah 96cm, pada
jarak sensor ultrasonik membaca 300cm jarak sebenarnya adalah 294cm, pada jarak sensor
ultrasonik membaca 400cm jarak sebenarnya adalah 395cm dan terakhir pada jarak sensor
ultrasonik membaca 500cm jarak sebenarnya adalah 492cm.
Alat simulasi prototipe ini tidak bisa berhenti mendadak pada saat ada penghalang didepan
sensor, karena pada rangkaian sistem perancangan alat pengendali kecepatan berbasis pwm dan
arduino menggunakan sensor ultrasonik ini hanya memutuskan tegangan pada motor sehingga alat
hanya bisa berhenti bertahap dengan ide bahwa jika di terapkan pada kendaraan sungguhan alat ini
berfungsi mengendalikan pedal rem secara perlahan layaknya pengemudi ketika menginjak pedal
tidak langsung secara dalem tapi secara pelan-pelan. Sensor ultrasonik bekerja jika adanya suatu
objek yang menghalangi sehingga dapat memantulkan sinyal ultrasonik tranduser yang kemudian
diterima oleh receiver ultrasonik, (Nurhadi, 20013).
Dari hasil satu data percobaan dengan jarak 35cm menggunakan sensor ultrasonik dan
AVR Atmega8535, hasil yang dianalisi pada resistor berbeda dan tidak stabil, artinya suplai setiap
nilai resistor menentukan jarak yang berbeda yaitu semakain rendah nilai resistor maka jarak
yang terbaca semakin pendek. (Debian, 2015).
>500 >500 >500 >500 >500 >500 >500 >500 >500 500
500
500
0
50
100
150
200
250
300
PW
M
Waktu (ms)
(cm)
10
4. PENUTUP
Dari keseluruhan proses penelitian ini mulai dari pengumpulan data, menganalisis, dan
membahas hasilnya, maka didapatkan suatu kesimpulan sebagai berikut :
1. Penggunaan modul sensor ultrasonik HC-SR04 dapat menghasilkan data yang lebih
akurat karena rangkaian TX dan RX sudah menjadi satu pada modul. Sedangkan
penggunaan sensor ultrasonik yang lain, data yang diperoleh kurang akurat karena harus
membuat rangkaian TX dan RX sendiri. dan hasil jarak penghalang ditampilkan melalui
LCD dengan satuan cm.
2. Mikrokontroler Arduino cukup baik untuk sebuah fungsi alat yang membutuhkan akses
pengontrolan otomatis menggunakan program bahasa C, terbukti ia dapat ditulis bahasa
pemograman secara berulang kali yang mampu membaca dan mentransfer data secara
cepat ke setiap pin yang dihubungkan, misalnya pada pin Bluetooth, Sensor Ultrasonik
HC-SR04, komponen PCB, Motor, dan LCD.
3. Hasilnya berhasil dibuat sebagai mana yang telah dilihat pada alat dan data.
Dari hasil penelitian yang dibuat dalam alat pengendali kecepatan otomatis menggunakan
sensor Ultrasonik HC-SR04 yang dikontrol oleh arduino UNO ini, maka penulis memberikan
saran kepada pembaca dalam rangka untuk kemajuan alat ini kedepanya, diantaranya :
1. Bisa mengoperasikan dikendaraan sesungguhnya dengan cara membuat alat pada pedal
agar dapat dikontorol secara mekanik maupun elekrtik.
2. Membandingkan sekaligus menganalis mikrokontroler arduino uno dan sensor ultrasonik
HC-SR04 dengan merk arduino dan sensor lainya.
DAFTAR PUSTAKA Anggoro., & Setyo, A,. (2014). Kendali Kecepatan Motor Dc Berdasarkan Perubahan Jarak
Menggunakan Pengendali Logika Fuzi Berbasis Mikrokontroler At89c51.Universitas
Gajah Mada .
Arifin, S., & Fathoni,. (2014). Pemanfaatan Pulse Widht Modulation Untuk Mengontrol Motor
(Studi Kasus Robot Otomatis Dua Deviana).Stimik Asia Malang .
Evans, D.M,. (2011). Braking Distance.Australian Mathematical Sciences Institute .
Fuad, Z., Apriana, A., & Haryad, D.D,. (2015), Optimalisasi Rancang Bangun Mobil Listrik Sebuah
Studi Kendaraan Hemat Energi Sebagai Bagian Solusi Alternatif Krisis Energi Dunia,
Politeknik Jakarta.
Hasibuan, Z.. (2007). Metodologi Penelitian Pada Bidang Ilmu Komputer Dan Teknologi Informasi
: Konsep, Teknik, Dan Aplikasi.Jakarta .
Khuamedi, A., Soedjarwanto, N., & Trisanto, A,. (2014). Otomatisasi Pengereman Motor Dc
Secara Elektris Sebagai Referensi Sistem Keamanan Mobil Listrik.Jurnal Rekayasa Dan
Teknologi Elektro , Vol 8, No 1.
Mastok, D.V,. (2015). Model Pengereman Mobil Listrik Berbasis Mikrokontrolet
Atmega8535.Universitas Sanata Dharma Yokyakarta .
11
Nurhadi, M, (2013). Perancangan Alat Pengereman Otomatis Pada Mobil Listrik Dengan Sensor
Ultrasonik Berbasis Mikrokontroler At89s52. Stmik Nusa Mandiri.
Slamet, H,. (2010). Sensor Ultrasonik Srf05 Sebagai Memantau Kecepatan Kendaraan Bermotor.
Ist Akprint, Yogyakarta .
Trisnaningtyas, A.B & Sutantra, N. (2012). Pengembangan Model "Regenerative Brake" pada
Mobil Listrik Untuk Menambah Jarak Tempuh dengan Variasi Kecepatan. Institusi
Teknologi Sepuluh November.
Wijemanne, S.R.2000, Charasteristics Of Sonar Range Sensor Srf05, University Of Moratua, Sri
Lanka.
Zainuri, H.I. (2015). Analisis Sumber Tenaga Kendaraan pada Mobil Listrik Untuk Mendapatkan
Efisien Data. Jakarta.
Zulmi, F,. (2014). Rancang Bangun Alat Pendeteksi Jarak Aman Pada Kendaraan Berbasis
Arduino.Universitas Mercu Buana, Jakarta .