model pembelajaran off-line menggunakan jaringan … · perubahan dan belajar atau menerima sesuatu...
TRANSCRIPT

1
Model Pembelajaran Off-Line MenggunakanJaringan Syaraf Tiruan Untuk Pengemudian
Otomatis pada Kendaraan BerodaJurusan Teknik Elektronika PENS 2009
Arie Setya Wulandari#1, Eru Puspita S.T., M.Kom#2
#Jurusan Teknik Elektronika, Politeknik Elektronika Negeri SurabayaKampus PENS-ITS Sukolilo, Surabaya
[email protected]@eepis-its.edu
Abstrak— Jaringan Syaraf Tiruan adalah pemrosesansuatu informasi yang terinspirasi oleh sistim sel syaraf biologiJaringan Syaraf Tiruan, seperti manusia, belajar dari suatucontoh. Jaringan Syaraf Tiruan telah dikembangkan sebelumadanya suatu komputer konvensional yang canggih dan terusberkembang walaupun pernah mengalami masa vakum selamabeberapa tahun.
Di jaman yang serba canggih seperti sekarang initeknologi Jaringan Syaraf Tiruan banyak diterapkan untukmengontrol pergerakan robot. Dalam Tugas Akhir ini kamimembuat aplikasi Jaringan Syaraf Tiruan yang didasarkan padaproses belajar sendiri. Program akan melakukan prosespembelajaran tertentu bagaimana untuk bergerak maju,mundur, ke kiri, ke kanan atau kemungkinan lain berdasarkanpengalaman tabrakan yang terjadi. Diharapkan dari prosespembelajaran ini, program dapat menentukan cara bergerakdengan sendirinya jika mengalami atau menemui halangan-halangan.
Jenis mobile robot yang digunakan adalah tricycle.Tricycle terdiri dari satu buah roda depan dan dua buah rodabelakang. Dengan 4 input berupa sensor untrasonic dan outputberupa 2 motor. Dimana input berupa sensor ultrasonic tersebutakan diolah pada Jaringan Syaraf Tiruan sehinggamenghasilkan error yang dapat digunakan untuk prosesbackpropagation .
Kata kunci: Jaringan Syaraf Tiruan, Konvensional, Tricycle,sensor Ultrasonic, Backpropagation
I. PENDAHULUAN
Neural Network atau Jaringan Syaraf Tiruan adalahsuatu sistem yang terdiri dari arsitektur jaringan syaraf danmetode pembelajaran. Neural Network secara umumdigunakan untuk menirukan sistem kerja otak yang memilikikemampuan untuk belajar (beradaptasi atau mengikutiperubahan dan belajar atau menerima sesuatu yang baru).Karena itu, Neural Network secara konsep dapat digunakanuntuk berbagai permasalahan yang berkaitan dengan belajar.Tentu saja hal ini tidak dapat digunakan secara luas dalamkenyataannya tidak bisa secara penuh ditirukan struktur danmekanisme kerja dari otak. Untuk satu jenis permasalahan
akan memerlukan arsitektur dan metode pembelajaran yangtersendiri. Bahkan untuk satu permasalahan dapat diselesaikandengan berbagai macam pilihan. Termasuk untuk aplikasipada sistem kontrol dapat diselesaikan dengan berbagai cara,dan dalam tulisan ini akan disajikan sistem kontrol yangmenggunakan Neural Network dengan arsitektur dan metodeyang disederhanakan untuk keperluan implementasi berbasismikrokontroler.
II. TEORI PENUNJANG
A. ARSITEKTUR JARINGAN SYARAF TIRUAN
Arsitektur JST yang sederhana dapat dilihat padagambar berikut:
Gambar1 Model Dasar Jaringan Syaraf Tiruan
Gambar di atas merupakan model JST yangsederhana, yang terdiri dari input, output dan satu unit hiddenyang terletak pada suatu lapisan tersembunyi (hidden layer).Pembagian arsitektur jaringan saraf tiruan bisa dilihat darikerangka kerja dan skema interkoneksi. Kerangka kerjajaringan saraf tiruan bisa dilihat dari jumlah lapisan (layer)dan jumlah node pada setiap lapisan.Ada beberapa arsitektur Jaringan Syaraf Tiruan:
1. Single-layer neural network

2
Adalah Sebuah net yang memiliki satu layer darihubungan pembobot-pembobotnya, diantara unit-unitinput dengan unit-unit output. Jaringan ini hanyamenerima input kemudian secara langsung akanmengolahnya menjadi output tanpa harus melaluilapisan tersembunyi (Gambar 2.4). Pada Gambar 2.4tersebut, lapisan input memiliki 3 neuron, yaitu X
1,
X2, X
3. Sedangkan pada lapisan output memiliki 2
neuron yaitu Y1dan Y
2.Neuron-neuron pada kedua
lapisan saling berhubungan. Seberapa besarhubungan antara 2 neuron ditentukan oleh bobotyang bersesuaian. Semua unit input akandihubungkan dengan setiap unit output.
Gambar2 Single Layer Neural Network2. Multilayer neural network
Adalah sebuah net yang terdiri dari banyaklapisan yang terdapat diantara lapisan input danlapisan output dan juga memiliki 1 atau lebih lapisantersembunyi. Untuk beberapa kasus, mungkinmultilayer lebih menguntungkan, tetapi padaumumnya dengan satu layer saja sudahmemadaiuntuk menyelesaikan berbagai masalah. Umumnya,ada lapisan bobot-bobot yang terletak antara 2lapisan yang bersebelahan. Jaringan dengan banyaklapisan ini dapat menyelesaikan permasalahan yanglebih sulit dari pada lapisan dengan lapisan tunggal,tentu saja dengan pembelajaran yang lebih rumit.Namun demikian, pada banyak kasus, pembelajaranpada jaringan dengan banyak lapisan ini lebih suksesdalam menyelesaikan masalah.
Gambar3 Multilayer Neural Network
3. Competitive neural networkHubungan antar neuron pada lapisan
kompetitif ini tidak diperlihatkan pada diagramarsitektur. Gambar 2.6 menunjukkan salah satucontoh arsitektur jaringan dengan lapisan kompetitifyang memiliki bobot –ή.
Gambar4 Competitive Neural Network
B. ALGORITMA PEMBELAJARANBACKPROPAGATION
Metode Neural Network atau Jaringan Syaraf Tiruan(JST) yang akan digunakan pada proyek akhir inimenggunakan algoritma Backpropagation. Aturan belajaralgoritma ini adalah menggunakanerror atau ketidaksesuaian output dengan target untuk koreksibobotnya. Bobot di koreksi sampai error dapat diterima(memenuhi toleransi yang kita berikan) atau sampai denganjumlah epoch tertentu.
Prosedur pengajaran atau pembentukan bobot-bobotyang digunakan adalah sebagaimana yang digunakan dalampengajaran jaringan yang bersifat supervised learning(pengajaran yang menggunakan target). Sehingga aturan inimemerlukan pasangan output untuk tiap input yang akandiajarkan. Dengan keadaan bobot awal random, tiap inputdilewatkan ke bobot tersebut dan di hasilkan output untuk saatitu. Output tersebut dibandingkan dengan target yangdiinginkan. Besar perbedaan yang terjadi digunakan sebagaifaktor pengubah pembobot yang menghubungkan inputdengan output tersebut (Update wight). Sehingga denganbobot yang baru akan mengarahkan output ke target yangseharusnya. Proses perubahan bobot berdasarkan error inidilakukan terus sampai output yang di hasilkan sesuai denganyang di targetkan, atau mempunyai error yang dapat diterima.
Tujuannya, yaitu melatih sistem jaringan untukmencapai suatu keseimbangan dalam merespon secara benarmodel input yang telah dilatihkan, dan kemampuan untukmemberikan respon yang masuk akal bagi input yang miriptetapi tidak identik dengan input pada saat pembelajaran. Padaproses pengajaran, diperlukan semua pola data input yangakan diajarkan dan target yang telah di tentukan sebelumnya.Setiap pola yang diinputkan akan diolah dan diproses melaluibobot yang ada, dan hasilnya dibandingkan dengan data targetyang diinginkan, kemudian dihitung error-nya (ketidaksamaanhasil saat itu dengan hasil yang diinginkan). Dimana errortersebut diumpan-balikkan (backpropagation) kebobot yangmenghubungkan layer tersebut sebagai sinyal koreksi bobot,agar dengan bobot yang baru errornya berkurang sampaidengan harga yang diterima.

3
Prinsip algoritma backpropagation memiliki 3 fase1. Fase feedforward pada pola input pembelajaran.2. Fase kalkulasi dan backpropagation error yangdidapat.3. Fase penyesuaian bobot.Arsitektur yang digunakan adalah jaringan
perseptron lapisbanyak (multi layer perseptron), hal ini merupakangeneralisasi dariarsitektur jaringan perseptron lapis tunggal. Secara umum,algoritmajaringan ini memerlukan waktu pembelajaran yang memanglambat,namun setelah pembelajaran selesai, aplikasinya akanmemberikanoutput yang sangat cepat dikarenakan faktor pembobot yanglebih baik.
Algoritma pelatihan untuk jaringan saraf tiruan BackPropagation ini adalah sebagai berikut :Langkah 0 : Inisialisasi nilai bobot dengan nilai acakyang kecil.Langkah 1 : Selama kondisi berhenti masih tidak
terpenuhi, laksanakan langkah 2 sampai 9.Langkah 2 : Untuk tiap pasangan pelatihan, kerjakanlangkah 3 sampai 8. Feedforward :Langkah 3 : Untuk tiap unit masukan (X
i, i=1,…,n)
menerima sinyal masukan xi
dan
menyebarkan sinyal itu keseluruh unit pada lapisatasnya (lapis tersembunyi).Langkah 4 : Untuk tiap unit tersembunyi (Z
j, j=1,…,p)
dihitung nilai masukan denganmenggunakan nilai bobotnya :
Z_inj = V0j+ I Vij (2.5)
Kemudian dihitung nilai keluaran denganmenggunakan fungsi akti-vasi yang dipilih :z
j= f ( z_in
j) dimana fungsi aktivasi yang
digunakan ialah fungsi sigmoid biner yangmempunyai persamaan :
f1(x) = (2.6)
Hasil fungsi tersebut dikirim ke semua unitpada lapis di atasnya.
Langkah 5 : Untuk tiap unit keluaran (Yk, k=1,..,m)
dihitung nilai masukan dengan menggunakan nilaibobot- nya :
y_ink = W0k + (2.7)
Kemudian dihitung nilai keluaran denganmenggunakan fungsi aktivasi :
yk = (2.8)
Perhitungan backward :Langkah 6 : Untuk tiap unit keluaran (Y
k, k=1,..,m)
menerima pola target yang bersesuaiandengan pola masukan, dan kemudiandihitung informasi kesalahan :
k = (tk-yk) f’(y_ink) (2.9)
Kemudian dihitung koreksi nilai bobot yangkemudian akan digunakan untukmemperbaharui nilai bobot w
jk.:
Wjk = k zj (2.10)
Hitung koreksi nilai bias yang kemudianakan digunakan untuk memperbaharui nilaiw
0k:
W0k = k (2.11)
dan kemudian nilai δk dikirim ke unit padalayer sebelumnya.
Langkah 7 : Untuk tiap unit tersembunyi (Zj, j=1,…,p)
dihitung delta masukan yangberasal dari unit pada layer di atasnya :
j = k Wjk (2.12)
Kemudian nilai tersebut dikalikan dengannilai turunan dari fungsi aktivasi untukmenghitung informasi kesalahan :
j = j f’ (z_inj) (2.13)
Hitung koreksi nilai bobot yang kemudiandigunakan untuk mem-perbaharui nilai υij :
ij = j Xi (2.15)
dan hitung nilai koreksi bias yang kemudiandigunakan untuk memperbaharui υoj :
V0j = j (2.16)
Memperbaharui nilai bobot dan bias :Langkah 8 : Tiap nilai bias dan bobot (j=0,…,p) padaunit keluaran (Y
k, k=1,…,m) diperbaharui :
Wjk (new) = Wjk (old) + jk
Vij (new) = Vij (old) + ij (2.17)
Langkah 9 : Menguji apakah kondisi berhenti sudahterpenuhi. Kondisi berhenti ini

4
terpenuhi jika nilai kesalahan yang dihasilkan lebih kecil darinilai kesalahan referensi.
III. PERANCANGAN PROGRAM
A. BLOK DIAGRAM SISTEM
Pre-proses JST DriverMotor
Dua MotorKemudi
PenghitungError
Sensor-sensor
SasaranPembelajaran
SensorTabrakan
SensorArah Maju
Gambar5 Blok Diagram Sistem
B. FLOWCHART SISTEM
Gambar6 Flowchart Algoritma Keseluruhan Sistem
Cara kerja keseluruhan sistem adalah pertama kaliprogram tidak memiliki kemampuan mengemudi sama sekali,atau mengambil nilai kemampuan yang telah disimpansebelumnya. Jika program dalam keadaan tidak memilikikemampuan sama sekali (baru pertama dioperasikan), makaJST akan mengeluarkan tegangan kontrol ke motor secaraacak dan tak terkendali. Untuk mencegah hal yang tidakdiinginkan, dalam keadaan belum memiliki kemampuan
mengemudi, dilengkapi dengan pembatas kecepatan motor.Berdasarkan sensor tabrakan, sensor arah maju dan sasaranpembelajaran yang telah ditentukan (dalam hal ini programdiperintahkan untuk menghindari dari tabrakan dan bergerakmaju), maka program menghitung nilai error yang terjadi.Setiap terjadi tabrakan, dianggap ada suatu kesalahan.Besarnya nilai error digunakan untuk mempengaruhi JST agarmelakukan proses pembelajaran. Selama proses pembelajaran,JST akan mengeluarkan tegangan-tegangan kontrol ke motoryang berubah-ubah dan sulit ditentukan keadaannya. Jikaproses pembelajaran berhasil, JST akan mengeluarkantegangan kontrol ke motor yang menyebabkan motor bergerakuntuk menghindari dari tabrakan sambil berusaha maju kedepan.
C. PROSES PEMBELAJARANPada tahap pembelajaran terjadi prosees pengaturan
besarnya pembobot dalam jaringan saraf tiruan . Pembelajarandianggap berhasil jika nilai pembobot mencapai konvergen.Terdapat 3 tahap pembelajaran yaitu feedforward, error danbackpropagation, serta penyesuaian nilai bobot agar mencapaikonvergen. Konvergen disini maksudnya dapat dijelaskanpada gambar 3.4 berikut:
Gambar7 Blok diagram yang konvergen dalam pembelajaran
IV. PENGUJIAN DAN ANALISA
Pada bab ini akan dilakukan pengujian dan analisaterhadap beberapa algoritma yang telah dirancang dan dibuatpada bab sebelumnya.
A. PENGUJIAN DENGAN ITERASI
1) TujuanUntuk mengatur manuver gerakan robot agar dicapai
gerakan yang diinginkan yaitu dapat mendeteksi halangandengan cepat.
2) Parameter yang digunakan Input : 4 sensor ultrasonik Hidden layer : 3 Output : 2 motor Learning Rate : 1
Start
Inisialisasihardware
Error
JST
Gerakmotor
Stop
ya
tidak
5
3) Setting pengujianRobot diberi program yang sudah terdapat metode
jaringan syaraf tiruan. Dengan mengganti banyak iterasisupaya dihasilkan gerakan yang maksimal (meminimalisasihalangan, agar tidak menabraknya).
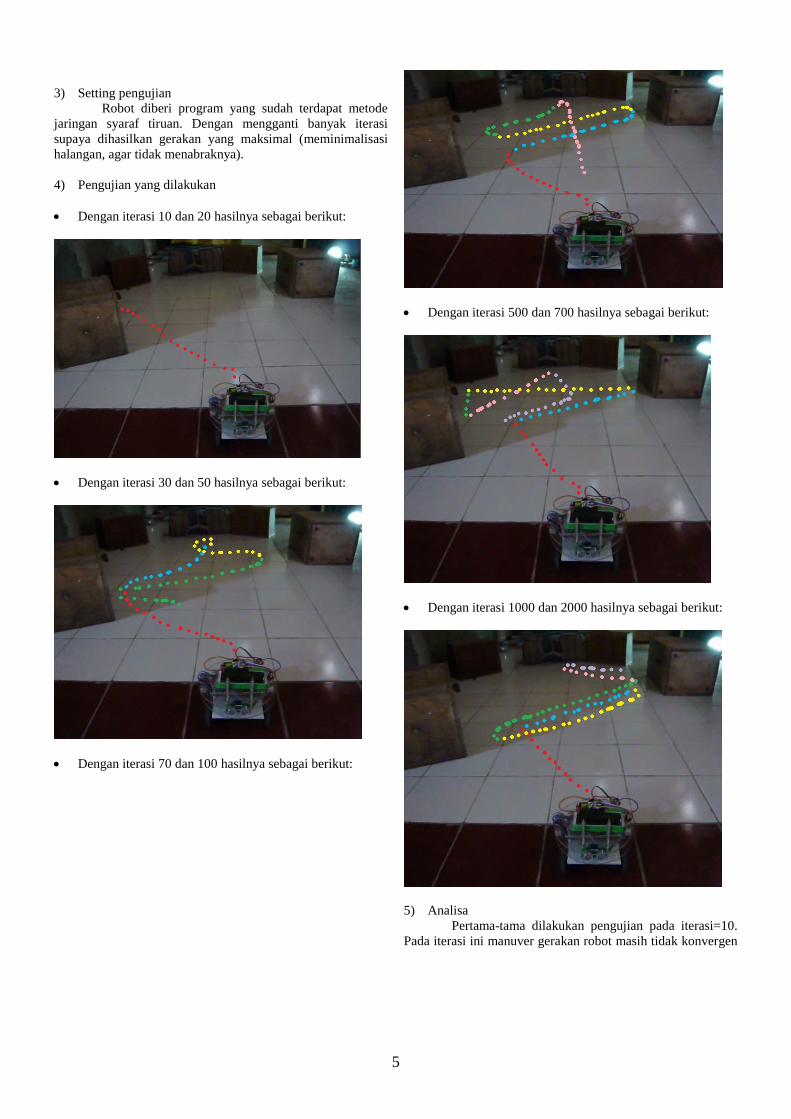
4) Pengujian yang dilakukan
Dengan iterasi 10 dan 20 hasilnya sebagai berikut:
Dengan iterasi 30 dan 50 hasilnya sebagai berikut:
Dengan iterasi 70 dan 100 hasilnya sebagai berikut:
Dengan iterasi 500 dan 700 hasilnya sebagai berikut:
Dengan iterasi 1000 dan 2000 hasilnya sebagai berikut:
5) AnalisaPertama-tama dilakukan pengujian pada iterasi=10.
Pada iterasi ini manuver gerakan robot masih tidak konvergen

6
artinya manuver gerakannya masih belum sesuai dengan yangdiinginkan. Prosentasenya 0%. Hal ini disebabkan karenaiterasi yang dilakukan sangat singkat yaitu 10 begitupuladengan iterasi=20. Sedangkan pada iterasi=30 sampaiiterasi=100. Pada iterasi ini manuver gerakan sudah seimbangyaitu prosentase 80%. Manuver gerakan yang dihasilkansudah sesuai dengan yang diinginkan. Misalnya pada saatrobot mobile diberi environment yang mengalangi setiapsensor depan dan belakang. Maka robot akan bergerak majudan belok kanan sesuai dengan manuver gerakan yang telahdipelajari pada iterasi sebelumnya. Sedangkan padaiterasi=200 sampai iterasi=2000, meskipun membutuhkanwaktu yang lama tetapi iterasi ini menghasilkan manuver yangsempurna sampai mencapai 100%.
Dari pengujian tersebut dapat diketahui bahwajaringan syaraf tiruan sangat berpengaruh terhadap manuverdari mobile robot apabila diberikan iterasi yang berbeda-beda.Hal ini dilakukan dengan mengubah iterasi-iterasi padaprogram yang telah dibuat. Semakin banyak iterasi makasemakin sempurna manuver gerakan meskipun semakin lamaiterasi maka semakin lama juga jaringan syaraf tiruanmelakukan pembelajaran.
B. PENGUJIAN DENGAN MENGGANTI NILAI TIAPNEURON HIDDEN
1) TujuanUntuk membandingkan manuver gerakan antara nilai
neuron hidden 2,3 dan 4.
2) Parameter yang digunakanPenggantian neuron hidden : 2,3 dan 4.Input : 4Output : 2Learning rate : 1Iterasi : 50,100,500
3) Setting pengujianDengan setting program yang sama, dilakukan
penggantian jumlah neuron hidden yaitu 2, 3 dan 4 dengandiberi iterasi masing-masing 50, 100 dan 500. Prosentasemanuver antara 0% sampai 100% dengan perincian sebagaiberikut:
0% sampai 30 % = manuver tidak sempurnamasih mengalami tabrakan.
40% sampai 60% = manuver belum sempurnapada sensor tertentu.
70% sampai 100% = manuver sudah sempurna
4) Pengujian yang dilakukan Neuron hidden : 2 Iterasi : 50, 100 dan 500
Tabel 4.7 Manuver pada neuron hidden 2
Iterasi Manuver robotWaktu melakukan
iterasi50 10% 13 detik100 40% 30 detik500 50% 2 menit 50 detik
Neuron hidden : 3 Iterasi : 50, 100 dan 500
Tabel 4.8 Manuver pada neuron hidden 3
Iterasi Manuver robotWaktu melakukan
iterasi50 30% 14detik100 50% 50 detik500 80% 3 menit 31 detik
Neuron hidden : 4 Iterasi : 50, 100 dan 500
Tabel 4.9 Manuver pada neuron hidden 4
Iterasi Manuver robotWaktu melakukan
iterasi50 60% 20detik100 70% 1 menit 10 detik500 90% 3 menit 40 detik
5) AnalisaDari percobaan yang telah dilakukan diketahui
bahwa pada saat neuron hidden=2 dan iterasi=50, mobilerobot masih mengalami tabrakan pada saat running awal. Halini disebabkan neuron hidden yang diberikan kecil dan jugaiterasi yang diberikan juga kecil. Kemudian pada saat iterasiselanjutnya yaitu pada saat iterasi=100, manuver mobile robotsudah sempurna pada saat running awal tetapi masihmengalami tabrakan pada saat 3 dari 4 sensor mendeteksihalangan. Hal ini juga terjadi pada iterasi=500. Pada saatneuron hidden=3 manuver yang dihasilkan pada tiap iterasijuga hampir sama dengan neuron hidden=2. Kemudian padaneuron hidden=4,iterasi=500 manuver yang dihasilkan sudahmendekati sempurna hanya saja pada saat halangan terletaklebih tinggi atau lebih rendah daripada letak sensor ultrasonikpada mobile robot, sensor tidak mendeteksi adanya halangan.
Pada tabel tersebut juga diketahui bahwa semakinbesar neuron hidden yang diberikan pada program makasemakin lama waktu iterasi yang dibutuhkan oleh mobilerobot.
C. PENGUJIAN DENGAN MENGGANTI NILAI TIAPNEURON HIDDEN
1) TujuanUntuk membandingkan manuver mobile robot antara
learning rate 0,5 kemudian 0,9 dan 1.

7
2) Parameter yang digunakanMerubah learning rate : 0.5; 0,9 dan 1Input : 4Output : 2Neuron hidden : 3Iterasi : 50,100,500
3) Setting pengujianDengan setting program yang sama, tetapi mengganti
nilai learning rate 0,5 kemudian 0,9 dan 1 dengan prosentasemanuver yaitu 0% sampai 100%. Perinciannya sebagai berikut:
0% sampai 30 % = manuver tidak sempurnamasih mengalami tabrakan.
40% sampai 60% = manuver belum sempurnapada sensor tertentu.
70% sampai 100% = manuver sudah sempurna
4) Pengujian yang dilakukan Dengan learning rate 0,5 hasilnya sebagai berikut:
Tabel 4.10 Manuver pada learning rate 0,5
Iterasi Manuver robotWaktu melakukan
iterasi50 40% 16 detik100 50% 45 detik500 60% 3 menit 40 detik
Dengan learning rate 0,9 hasilnya sebagai berikut:
Tabel 4.11 Manuver pada learning rate 0,9
Iterasi Manuver robotWaktu melakukan
iterasi50 40% 25 detik100 60% 45 detik500 80% 3 menit 50 detik
Dengan learning rate 1 hasilnya sebagai berikut:
Tabel 4.12 Manuver pada learning rate 1
Iterasi Manuver robotWaktu melakukan
iterasi50 50% 30 detik100 70% 1 menit500 90% 4 menit 20 detik
5) AnalisaDari percobaan dan simulasi yang telah dilakukan,
dapat diketahui bahwa manuver pada saat learning rate=0,5manuver tidak sempurna seperti pada saat iterasi 50.Dikarenakan pada saat iterasi tersebut sensor depan danbelakang kurang sempurna mendeteksi halangan sehinggamobile robot sering menabrak halangan. Kemudian pada saatlearning rate=0,9; iterasi=100, manuver sudah hampir
sempurna mendeteksi halangan sedangkan pada iterasi=500mobile robot masih belum bisa mendeteksi halangan dengancepat pada saat sensor depan bernilai 1 akan tetapi mobilerobot dapat bergerak mundur dengan cepat. Saat learningrate=1, merupakan manuver robot paling optimal yaitu hampirmendekati 100% meskipun pada iterasi 50 robot masihmenabrak halangan dan berhenti. Hal ini karena tidakdidukung oleh nilai iterasi yang banyak.
Di samping itu nilai learning rate yang banyakjugaberpengaruh pada waktu pembelajaran mobile robot.Seperti dapat dilihat pada masing-masing learning rate yaitu0.5;0.9 dan 1.
V. KESIMPULAN
Setelah melakukan tahap perancangan dan pembuatan sistemyang kemudian dilanjutkan dengan tahap pengujian dananalisa maka dapat diambil kesimpulan sebagai berikut :1. Proses pengenalan secara offline dengan menggunakan
tabel referensi memberikan pengaturan terhadap gerakanrobot supaya bisa bergerak ke kanan, kiri, maju danmundur.
2. Semakin banyak iterasi yang dilakukan padapembelajaran jaringan syaraf tiruan, maka semakin baikmanuver gerakan yang dihasilkan.
3. Simulasi terbaik yang dilakukan terdiri dari 4 input, 4neuron hidden, 2 output, 1 learning rate dan iterasi lebihbesar dari 500.
4. Dengan menggunakan metode jaringan syaraf tiruandengan diberikan iterasi yang besar maka manuver robotakan lebih smooth dan dapat mendeteksi halangan dengancepat.
DAFTAR PUSTAKA
[1]. Membangun Jaringan Syaraf Tiruan, Sri Kusumadewi, 2004, GrahaIlmu, Yogyakarta.
[2]. Andri Kristanto, 2004, Jaringan Syaaf Tiruan: Konsep Dasar,Algoritma, dan Apilkasi, Gava Media, Yogyakarta.
[3]. Diah Puspitaningrum, 2006, Pengantar Jaringan Saraf Tiruan, Andi,Yogyakarta.
[4]. Introduction to Neural Network by K. Gurney.http://www.shef.ac.uk/psychology/gurney/notes/contents.html
[5]. Neural Network by Christos Stergiou and Dimitrios Siganos,http://www.doc.ic.ac.uk/~nd/surprise_96/journal/vol4/cs11/report
[6]. Neural Network by Nikolay Nikolaefhttp://homepages.gold.ac.uk/nikolaef/cis311.html.course_outline_for_fall_2004.
[7]. Subiyanto, Pemakaian Jaringan Syaraf Tiruan Perambatan-BalikSebagai Cara Lain Prakiraan Beban Jangka Pendek Di Jawa Tengah-D.I.Y.. Tugas Akhir Teknik Elektro Fakultas Teknik UNDIP, Semarang,1998.
[8]. Valluru B. Rao and Hayagriva V. Rao, C++ Neural Network And FuzzyLogic, Miss: Press, New York, 1993.