matakuliah dasar-dasar instrumentasi (system models)
TRANSCRIPT

operator
Sekretaris
Materi 2 + slide maker
materi 6
Materi 3
1 2 3 4 5 6 7

TAHUKAN ANDA ???????
• Apa yang terjadi pada suhu saat thermostat memilikinilai set meningkat dari, 20 ° C sampai 22 ° C?
• Untuk menentukan bagaimana output dari suatusistem kontrol akan bereaksi terhadap input yang berbeda, kita membutuhkan model matematika darisistem sehingga kita memiliki persamaanmenggambarkan bagaimana output berkaitan denganinput
• istilah respon statik → mengacu pada waktu yang dibutuhkan untuk mencapai respon dan istilah respondinamik saat kita juga mempertimbangkan bagaimanaitu bervariasi dengan waktu
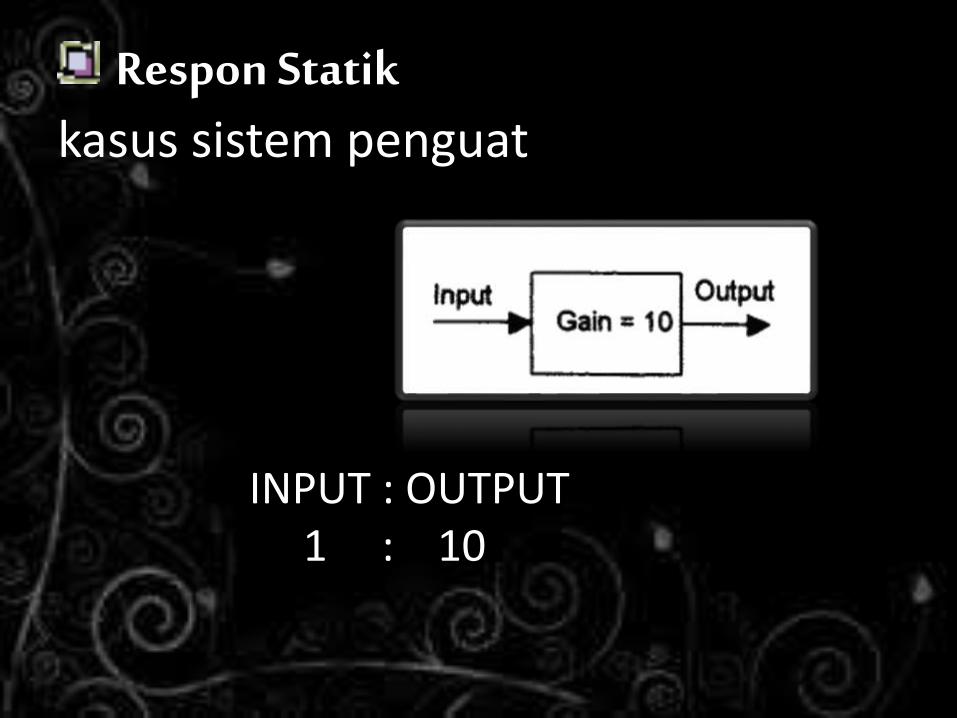
Respon Statikkasus sistem penguat
INPUT : OUTPUT1 : 10
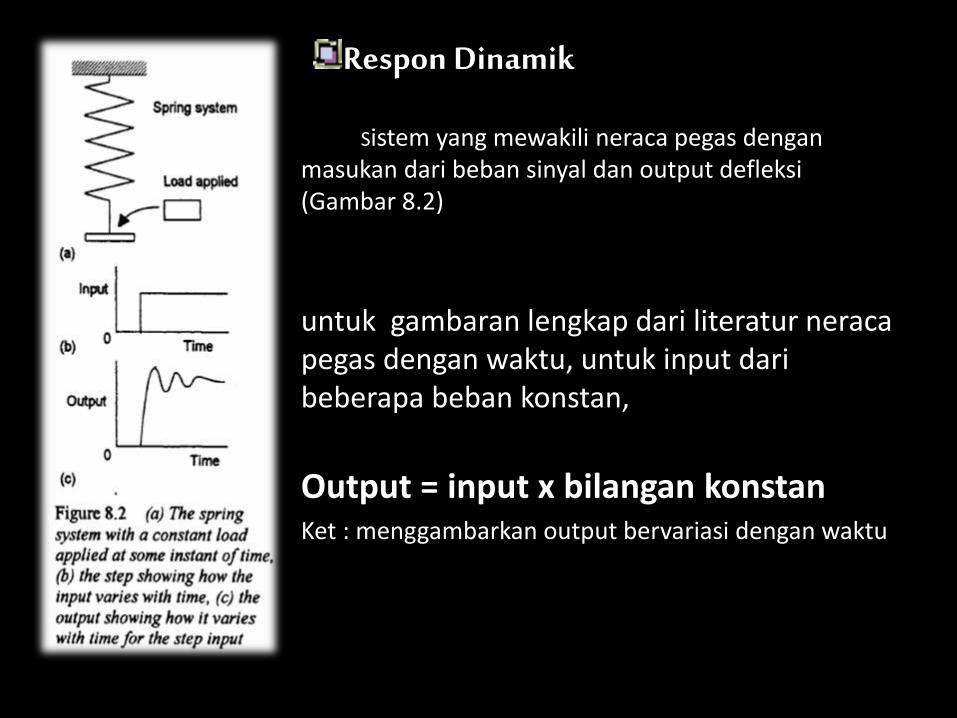
Respon Dinamik
Sistem yang mewakili neraca pegas denganmasukan dari beban sinyal dan output defleksi(Gambar 8.2)
untuk gambaran lengkap dari literatur neracapegas dengan waktu, untuk input daribeberapa beban konstan,
Output = input x bilangan konstanKet : menggambarkan output bervariasi dengan waktu

output = G X input
Contoh :Motor A memiliki kecepatan output yang berbanding lurus dengantegangan yang diberikan ke dinamonya.Jika output adalah 5 putaran per sekon, tegangan dariinput adalah 2 V, berapa keuntungan sistem?
Dengan output = G x input, kemudian G = 5/2 = 2.5 (rev/s)N.
Keuntungan sistem dalam seri
• Kedua system memiliki inputY1 = G1X1
y2 = G2y1 = G2 x G1X1
Sistem keseluruhan memiliki input x1 dan output> '2 dandengan demikian, jika kedua sistem konstituen mewakilisistem secara keseluruhan maka memiliki keuntungan dariG:
Y2 = Gx1
Dan sebagainya:
G = G1 x G2

Contoh• Sebuah sistem terdiri dari amplifier
dengan keuntungan sebesar 10 memberikan tegangan untuk motor yang memberikan kecepatan, output yang sebanding dengan tegangan, konstantaproporsionalitas menjadi 5 (rev / s) /V.Apa hubungan antara tegangan input kesistem dan keluaran kecepatan motor?
2
33 3 3
2
3
3 3
Keuntungan KeseluruhanG = G1 x G2 = 10 x 5 = 50 (rev/s)/V.
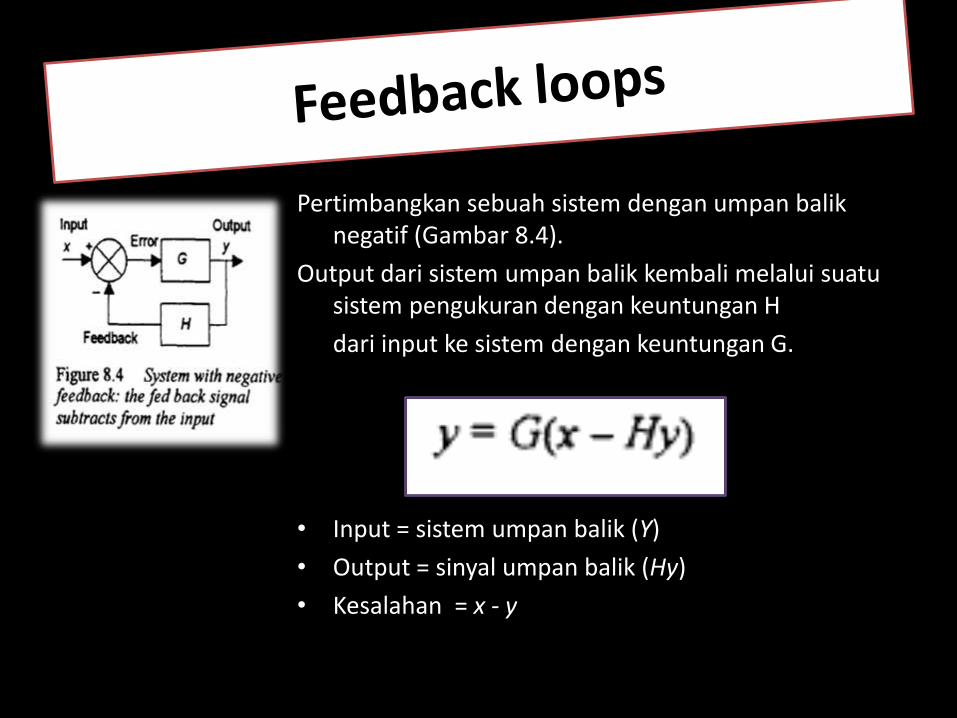
Pertimbangkan sebuah sistem dengan umpan baliknegatif (Gambar 8.4).
Output dari sistem umpan balik kembali melalui suatusistem pengukuran dengan keuntungan H
dari input ke sistem dengan keuntungan G.
• Input = sistem umpan balik (Y)
• Output = sinyal umpan balik (Hy)
• Kesalahan = x - y
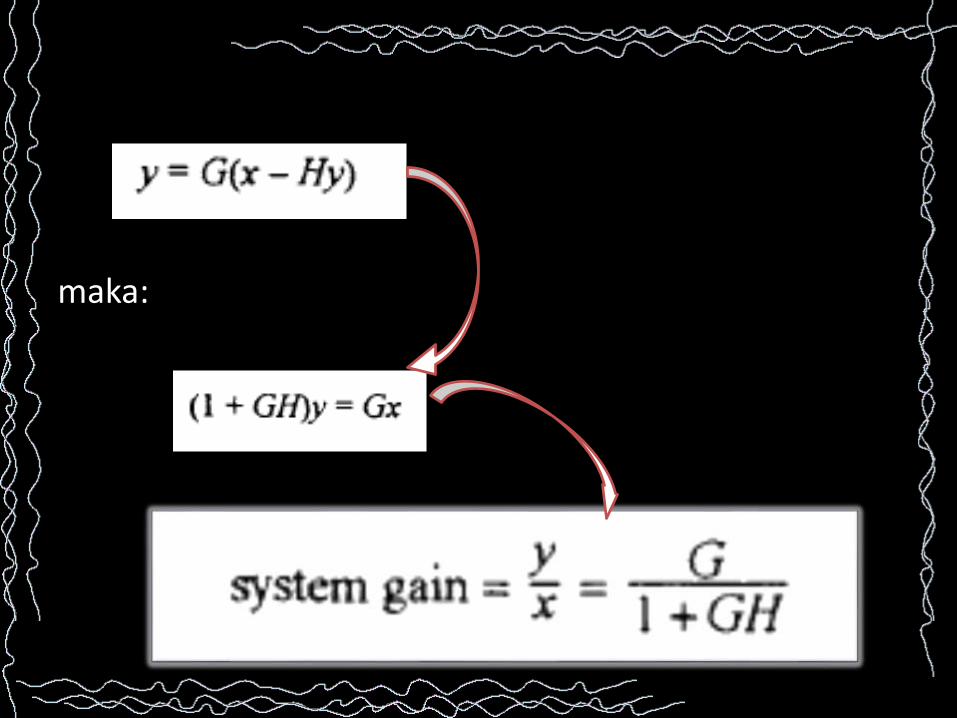
maka:
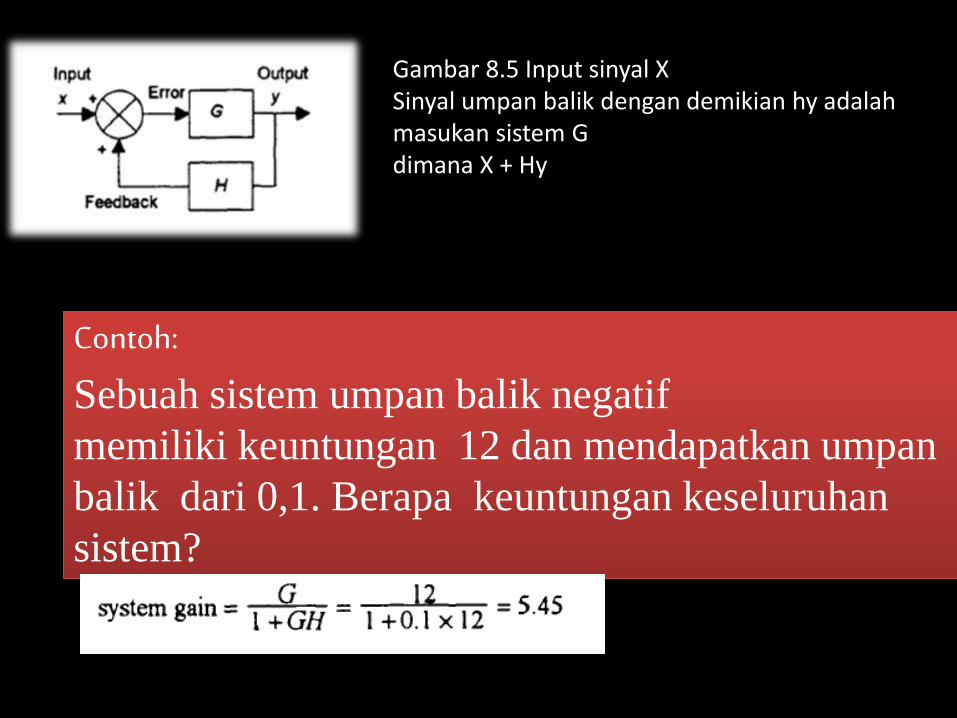
Contoh:
Sebuah sistem umpan balik negatif
memiliki keuntungan 12 dan mendapatkan umpan
balik dari 0,1. Berapa keuntungan keseluruhan
sistem?
Gambar 8.5 Input sinyal X Sinyal umpan balik dengan demikian hy adalahmasukan sistem Gdimana X + Hy
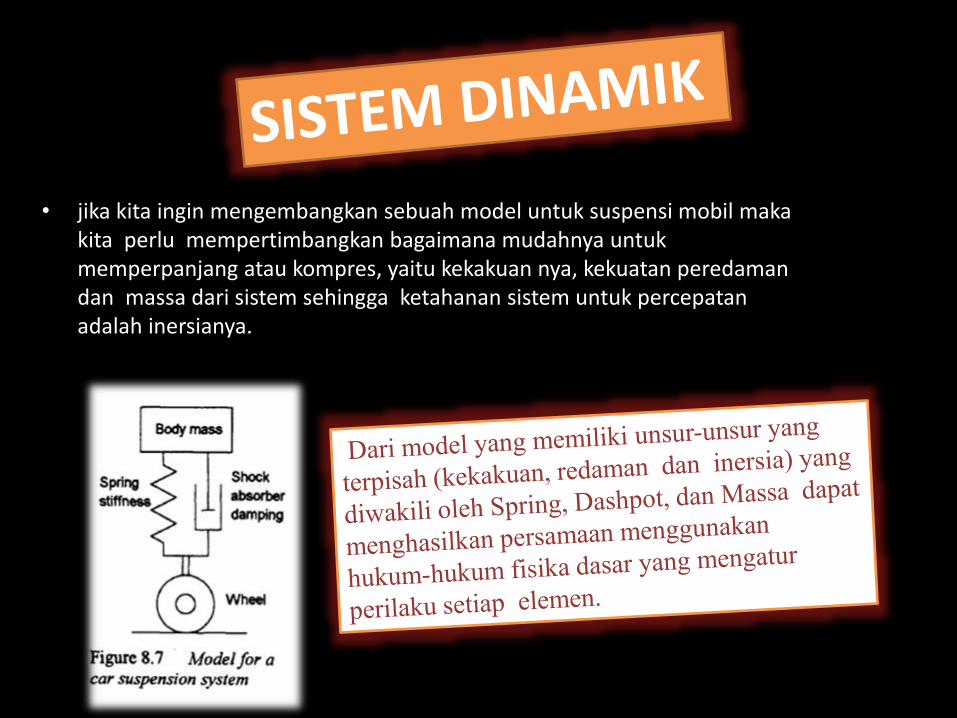
• jika kita ingin mengembangkan sebuah model untuk suspensi mobil makakita perlu mempertimbangkan bagaimana mudahnya untukmemperpanjang atau kompres, yaitu kekakuan nya, kekuatan peredamandan massa dari sistem sehingga ketahanan sistem untuk percepatanadalah inersianya.
1 Spring'pegas' atau 'kekakuan' suatu sistem dapat diwakili oleh pegas ideal (ideal karena hanya pegas dan tidak ada sifat lainnya). Untuk pegas linier, ekstensi y sebanding dengan gaya F diterapkan menjadi:
F = ky(dimana * adalah konstanta disebut kekakuan)
2 Dashpot'redaman' dari sebuah sistem mekanik dapat diwakili oleh dashpot.
Ini adalah piston bergerak dalam media kental.
Misalnya : minyak dalam sebuah silinder.Kekuatan resistif yang harus diatasi
adalah sebanding dengan kecepatan piston dan karenanya laju perubahan yperpindahan dengan waktu, yaitu dy / dt. Dengan demikian kita bisa menulis:

Sistem Rotasi
• Sistem kontrol dengan sistem rotasi,
(model poros penggerak motor (Gambar 8.10) )
dan bagaimana rotasi beban didorong akan terkait dengan
masukan memutar rotasi untuk drive shaft.
Sistem rotasi blok
bangunan dasar pegas torsi, sebuah peredam rotasi
dan momen inersia (Gambar 8.11).
• Torsional spring'kekakuan' atau 'pegas' Dari pegas rotasi direpresentasikanDibuat sebuah pegastorsional.Untuk pegas torsi, Sudut 0 adalah sebanding diputar T torsi
T = k0*Dimana k adalah ukuran kekakuan pegas
Rotasi dashpot Redaman yang melekat dalam gerakan rotasi diwakili oleh rotasi dashpot. Untukdashpot berotasi, yaitu efektif disk yang berputar dalam cairan, maka T torsi resistif 0 sebanding dengan kecepatan sudut . Berikut persamaannya :
T – cv – cf*Dimana c adalah konstanta redaman
• Unsur-unsur dasar dari sistem listrik merupakan komponen murni. Resistor, induktor dan kapasitor adalah
istilah murni yang digunakan untuk menunjukkan bahwaresistor hanya memiliki perlawanan.
1 Resistor
Untuk resistor, resistansi (R), (v) beda potensial di atasnya ketika ada arus (I) maka :
V= IR2 Induktor
Untuk induktor, induktansi (L) , (v) beda potensial di atasnya tergantung pada laju perubahan arus (I).
3 Kapasitor
Untuk kapasitor, v beda potensial di atasnya tergantung pada q muatan pada pelatkapasitor dengan v = q / C, di mana C adalah kapasitansi.
SISTEM ELEKTRIK
1 Kirchhoffs current lawTotal arus yang keluar sama dengan total arus yang diterima.
2 Kirchhofs voltage lawDalam jalur sirkuit tertutup, disebut sebagai loop, jumlah aljabar tegangan diseluruh unsur-unsur yang membentuk loop adalah nol.
Hal berikut sama dengan mengatakan bahwa untuk loop berisi sumber GGL, jumlah dari tetes potensi di setiap elemen sirkuit adalah sama dengan jumlahyang diterapkan. asalkan kita mempertimbangkan arah mereka.

Sistem termal1. Resistansi TermalResistensi termal R adalah resistansi yang ditawarkankepada q (panas) dan didefinisikan oleh:
T1 - T2 = perbedaan suhu di mana arus panas.Jadi untuk dua poin di suhu T 1 dan T2 dan L jarak terpisah:
k adalah konduktivitas termal. Dengan demikian
mode ini adalah perpindahan panas, R = L / Ak.
Untuk perpindahan panas secara konveksi antara dua titik,hukum Newton tentang pendinginan memberikan persamaan :
q = Ah(T2-T1)H : koefisien perpindahan panas danA : luas permukaan

2. Kapasitansi termal
perubahan energi internal = mc x (T2-T1)
m = massa
C = kapasitas spesifik
Sistem termal


1. Resistansi Hidrolik
• Hambatan Hidrolik (R ) resistansi terhadap aliranyang terjadi ketika cairan mengalir dari satu pipa.
• Resistansi Hidrolik = Hk. Ohm
2. Kapasitas Hidrolik
• Kapasitansi Hidrolik (C) penyimpanan energi dimanacairan hidrolik disimpan dalam bentuk energi potensial.
• Laju perubahan volume = perbedaan antara tingkatvolumetrik
• Kesimpulan
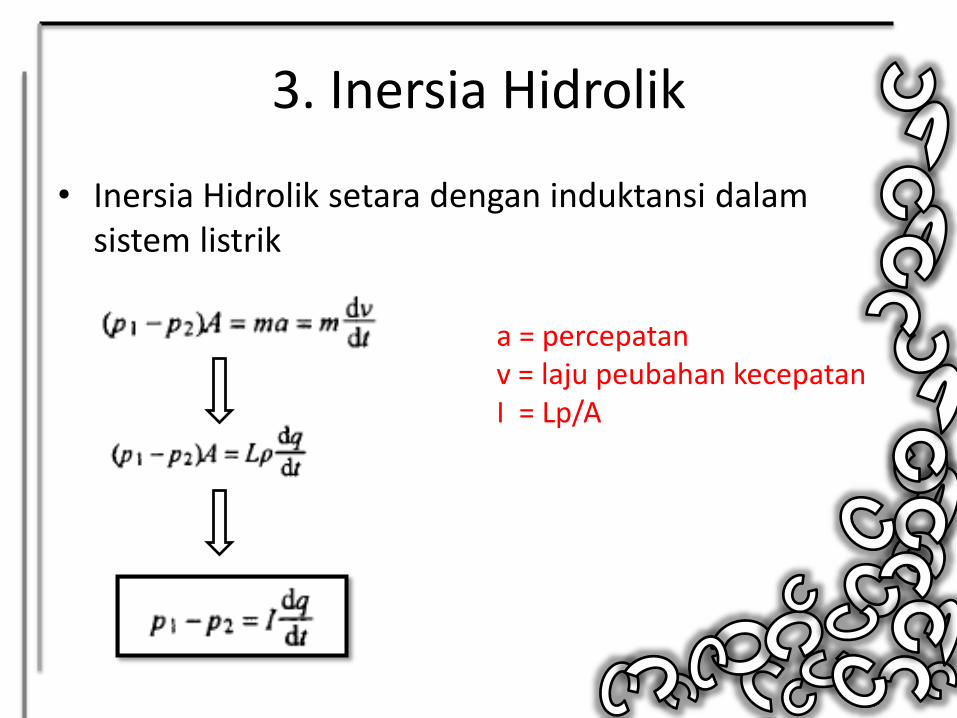
3. Inersia Hidrolik
• Inersia Hidrolik setara dengan induktansi dalamsistem listrik
a = percepatanv = laju peubahan kecepatanI = Lp/A
Aplikasi sebuah sistem kontrol yang digunakan untukmengendalikanketinggian cairan dalam sebuahwadah akan memiliki responyang tergantung pada kapasitansi sistem hidrolik
Jadi, sebuah wadah yang memiliki area permukaan besarutnuk cairan akanmemiliki kapasitansi yang lebih besar dari 1 dengan luaspermukaan lebih kecil
Sebagai akibatnya, lebih besar kapasitansi utnuk tingkat yang sama inflow dan outflow , tingkat perubahan tekanan dalam waktu akan lebih kecil.Karena tekanan = tinggi cairan → kapasitansi yang lebih besarberarti tingkatannya lebihlambat menanggapi input atau mengubah output

Persamaan differensial
• Bagian sebelumnya menunjukan hubungnaantara input dan output untuk sistem ini.
• Sebuah persamaan differensial adalahpersamaan yang melibatkan turunan, yatutingkat perubahan.
• Contoh : laju perpindahan (y) dengan waktu(t), ditulis sebagai dy/dt, atau laju perubahandengan waktu dy/dt ditulis sebagai dty/dt2
Orde pertama persamaan differensial
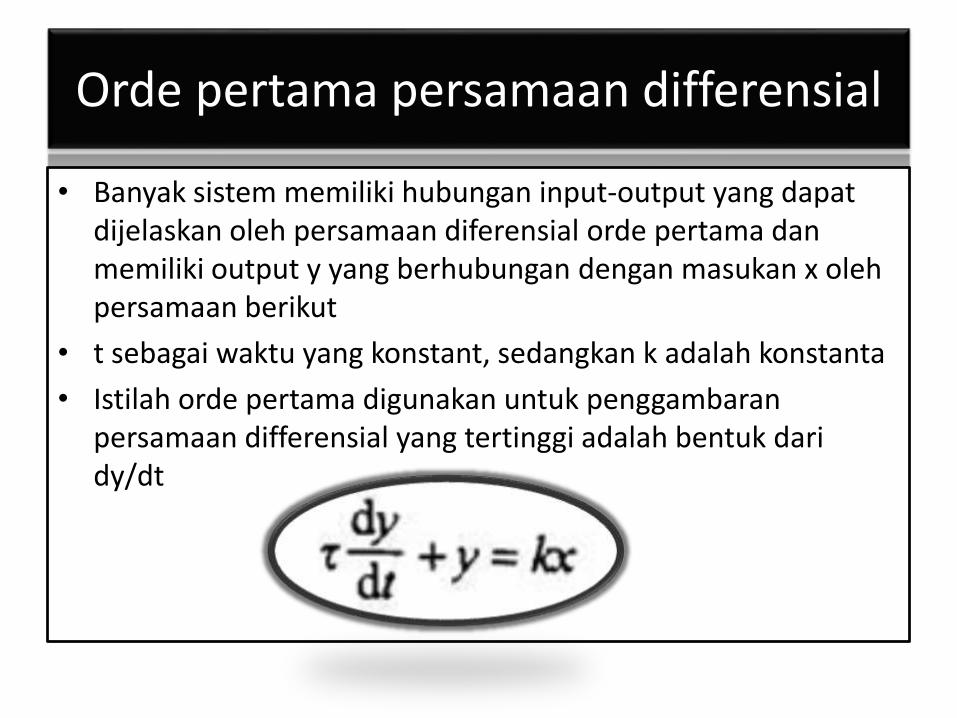
• Banyak sistem memiliki hubungan input-output yang dapatdijelaskan oleh persamaan diferensial orde pertama danmemiliki output y yang berhubungan dengan masukan x olehpersamaan berikut
• t sebagai waktu yang konstant, sedangkan k adalah konstanta
• Istilah orde pertama digunakan untuk penggambaranpersamaan differensial yang tertinggi adalah bentuk daridy/dt

Orde kedua persamaan diferensial
• Persamaan differensial orde kedua : istilah yang digunakan ketika turunan tertinggi adalah bentukd2y/dt2
• Banyak hubungan sistem input-output yang dapatdijelaskan oleh persamaan difernsial orde keduadenagn output y yang berhubungan dengan masukanx oleh persamaan berikut :
