m 0
TRANSCRIPT
BAB II
TINJAUAN PUSTAKA
2.1 Teori Dasar
2.1.1 Pengertian Mekatronika
Mekatronika adalah interaksi yang sinergis antara disiplin ilmu mekanika,
elektronika dan sistem kontrol dalam peracangan suatu produk secara otomasi
untuk meringankan pekerjaan manusia.
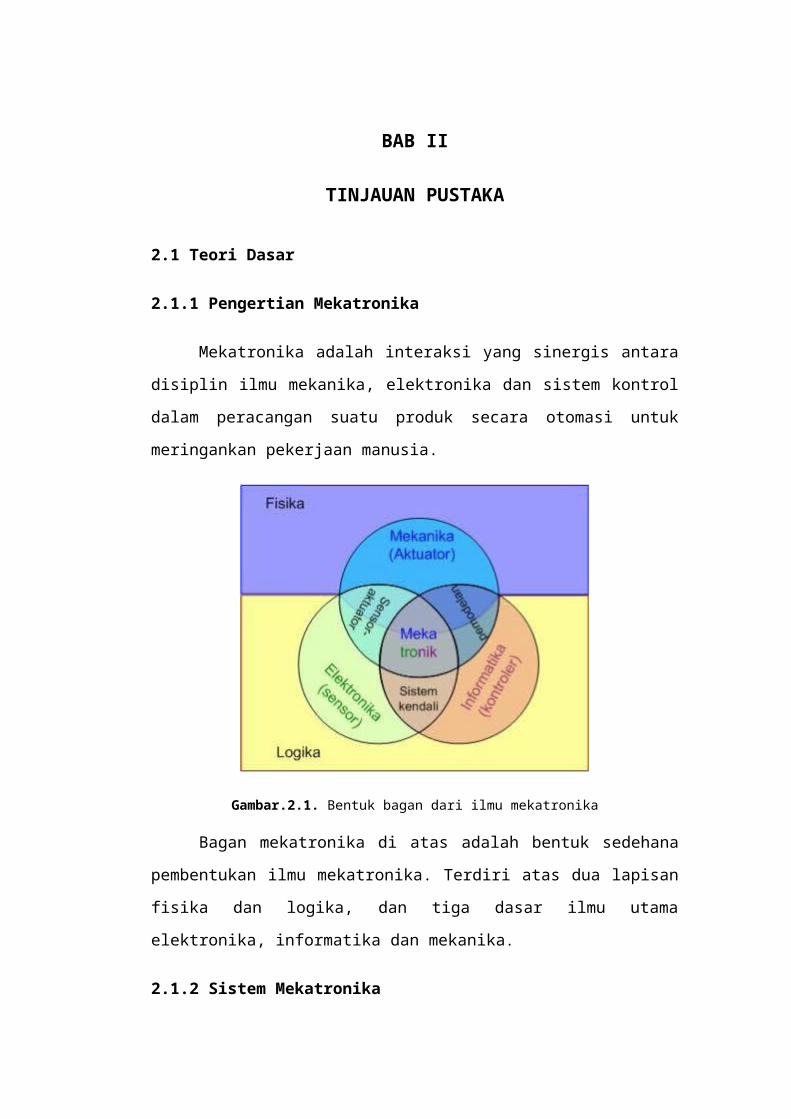
Gambar.2.1. Bentuk bagan dari ilmu mekatronika
Bagan mekatronika di atas adalah bentuk sedehana pembentukan ilmu
mekatronika. Terdiri atas dua lapisan fisika dan logika, dan tiga dasar ilmu utama
elektronika, informatika dan mekanika.
2.1.2 Sistem Mekatronika
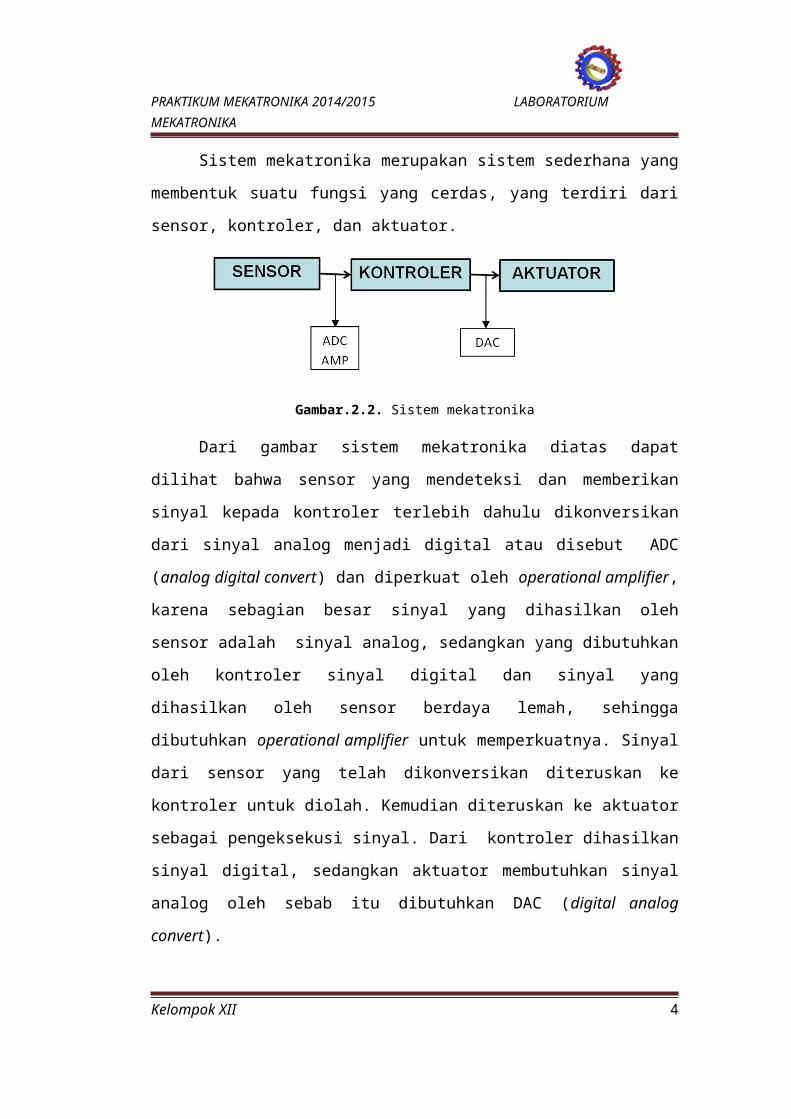
Sistem mekatronika merupakan sistem sederhana yang membentuk suatu
fungsi yang cerdas, yang terdiri dari sensor, kontroler, dan aktuator.
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Gambar.2.2. Sistem mekatronika
Dari gambar sistem mekatronika diatas dapat dilihat bahwa sensor yang
mendeteksi dan memberikan sinyal kepada kontroler terlebih dahulu
dikonversikan dari sinyal analog menjadi digital atau disebut ADC (analog
digital convert) dan diperkuat oleh operational amplifier, karena sebagian besar
sinyal yang dihasilkan oleh sensor adalah sinyal analog, sedangkan yang
dibutuhkan oleh kontroler sinyal digital dan sinyal yang dihasilkan oleh sensor
berdaya lemah, sehingga dibutuhkan operational amplifier untuk memperkuatnya.
Sinyal dari sensor yang telah dikonversikan diteruskan ke kontroler untuk diolah.
Kemudian diteruskan ke aktuator sebagai pengeksekusi sinyal. Dari kontroler
dihasilkan sinyal digital, sedangkan aktuator membutuhkan sinyal analog oleh
sebab itu dibutuhkan DAC (digital analog convert).
ADC(analog digital convert) adalah suatu alat elektronik yang mengubah
sinyal analog menjadi sinyal digital. DAC (digital analog convert) adalah suatu
alat elektronik yang dapat mengubah sinyal digital ke bentuk sinyal analog.
operational amplifier adalah suatu alat yang berfungsi memperkuat sinyal listrik
yang lemah (misalnya yang dihasilkan oleh sensor).
Sistem mekatronika sangat terkait erat dengan:
1. Otomasi dari produk dan proses
Otomasi adalah aspek mental, seperti mengawasi, mengendalikan
aktivasi dilakukan oleh sistem, sedangkan mekanisasi adalah aspek fisik yang
digantikan oleh mesin.
Misalnya pada mesin bubut adalah mekanisasi dari suatu proses
pemesinan, sedangkan mesin bubut CNC (pengendalian proses bubut
dilakukan oleh mesin) adalah otomasi suatu proses pemesinan.
Kelompok XII 4
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
2. Sistem Kontrol
Sistem kontrol adalah sistem yang menjaga suatu besaran keluaran
(temperatur, ketinggian air, putaran) relatif konstan.
Defenisi sistem pada sistem kontrol ditunjukkan pada suatu kotak hitam
yang memiliki input dan output.
Misalnya motor dapat dipandang sebagai suatu sistem dengan input
energi listrik dan energi mekanik (gerak rotasi) sebagai output.
Sistem kontrol dibedakan menjadi dua, yaitu sistem kendali loop
terbuka dan sistem kendali loop tertutup.
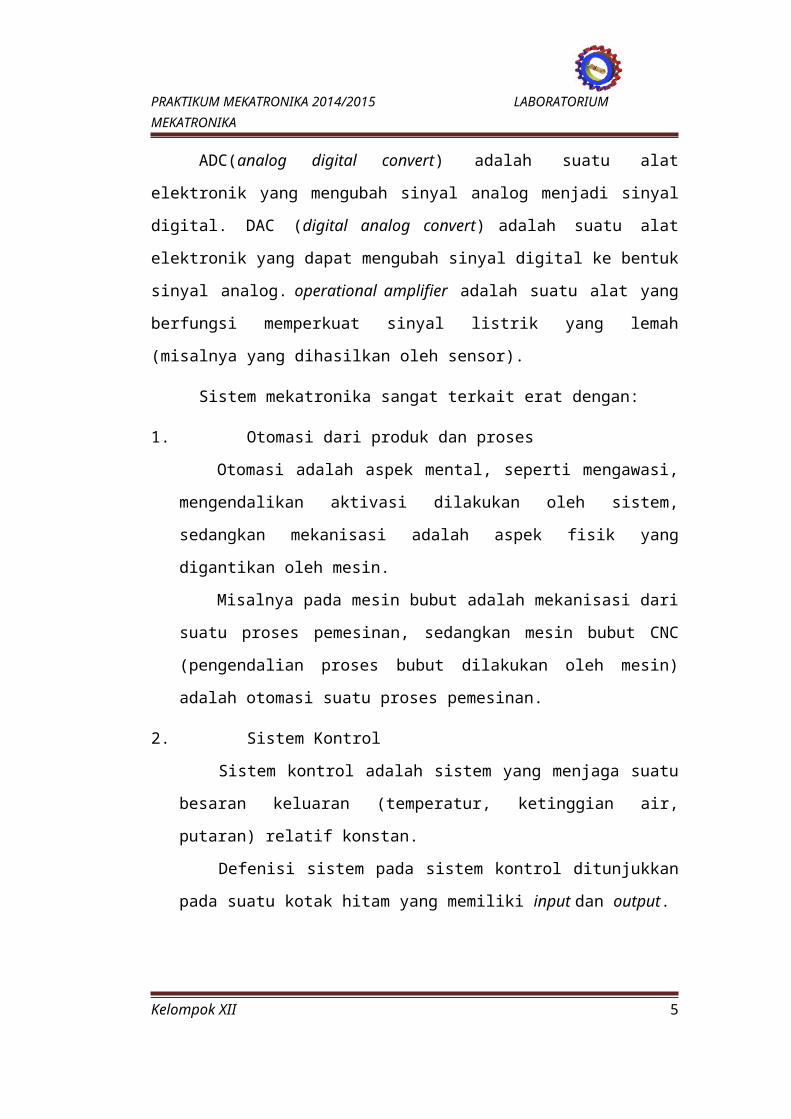
a. Sistem kontrol terbuka
Sistem kontrol terbuka adalah proses pengendalian dimana variabel
input mempengaruhi output yang dihasilkan.
Gambar.2.3. Skema Sistem Kontrol Terbuka
Dari gambar diatas dapat dipahami tidak ada informasi yang dibeikan
oleh peralatan output kepada bagian proses sehingga tidak diketahui apakah
hasil output sesuai dengan yang kita kehendaki.
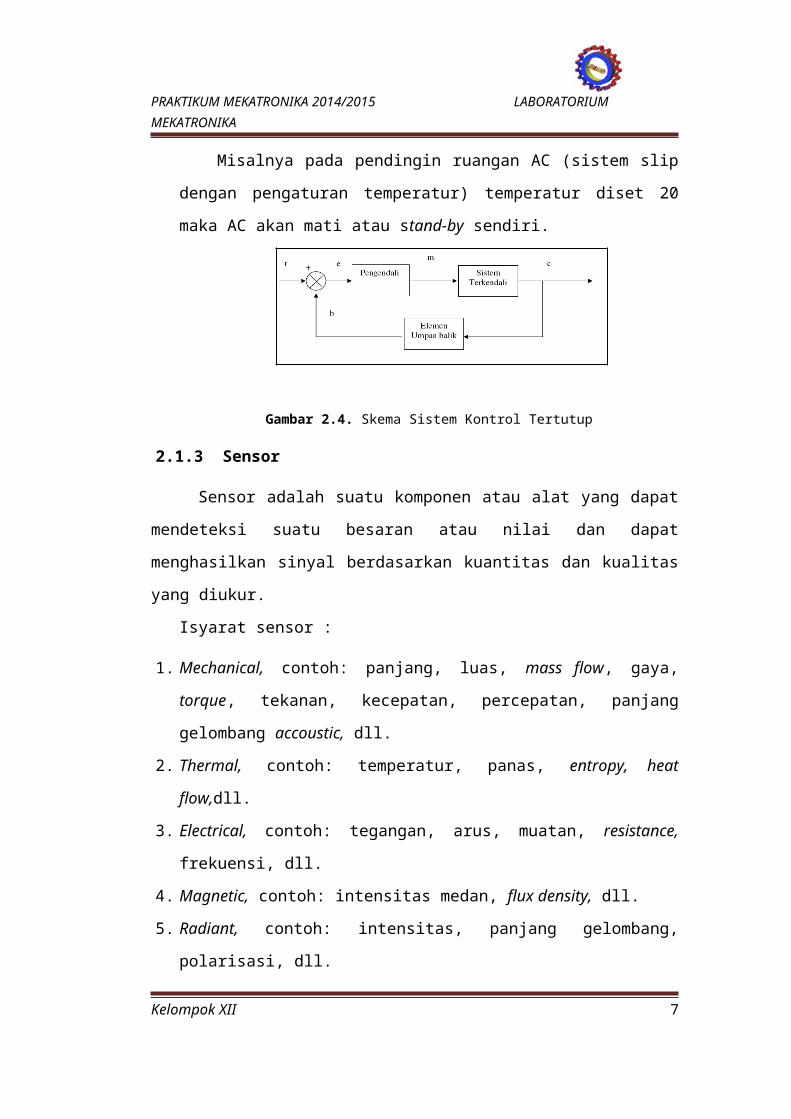
b. Sistem kontrol loop tertutup
Sistem kontrol loop tertutup adalah suatu proses pengendalian dimana
variabel yang dikendalikan (output) disensor secara kontiniu, kemudian
dibandingkan dengan besaran acuan.
Misalnya pada pendingin ruangan AC (sistem slip dengan pengaturan
temperatur) temperatur diset 20 maka AC akan mati atau stand-by sendiri.
Gambar 2.4. Skema Sistem Kontrol Tertutup
Kelompok XII 5
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
2.1.3 Sensor
Sensor adalah suatu komponen atau alat yang dapat mendeteksi suatu
besaran atau nilai dan dapat menghasilkan sinyal berdasarkan kuantitas dan
kualitas yang diukur.
Isyarat sensor :
1. Mechanical, contoh: panjang, luas, mass flow, gaya, torque, tekanan,
kecepatan, percepatan, panjang gelombang accoustic, dll.
2. Thermal, contoh: temperatur, panas, entropy, heat flow,dll.
3. Electrical, contoh: tegangan, arus, muatan, resistance, frekuensi, dll.
4. Magnetic, contoh: intensitas medan, flux density, dll.
5. Radiant, contoh: intensitas, panjang gelombang, polarisasi, dll.
6. Chemical, contoh: komposisi, konsentrasi, pH, kecepatan reaksi, dll.
Karakteristik sensor :
1. Kecermatan
Ukuran terkecil (skala) yang dapat dirasakan oleh sensor.
2. Keterulangan/ketepatan
Variasi nilai yang hampir sama dari pengukuran yang berulang-ulang.
3. Ketelitian
Kesesuaian harga yang terukur dengan harga sebenarnya.
Gambar.2.5. Diagram ketepatan dan ketelitian
Kelompok XII 6
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
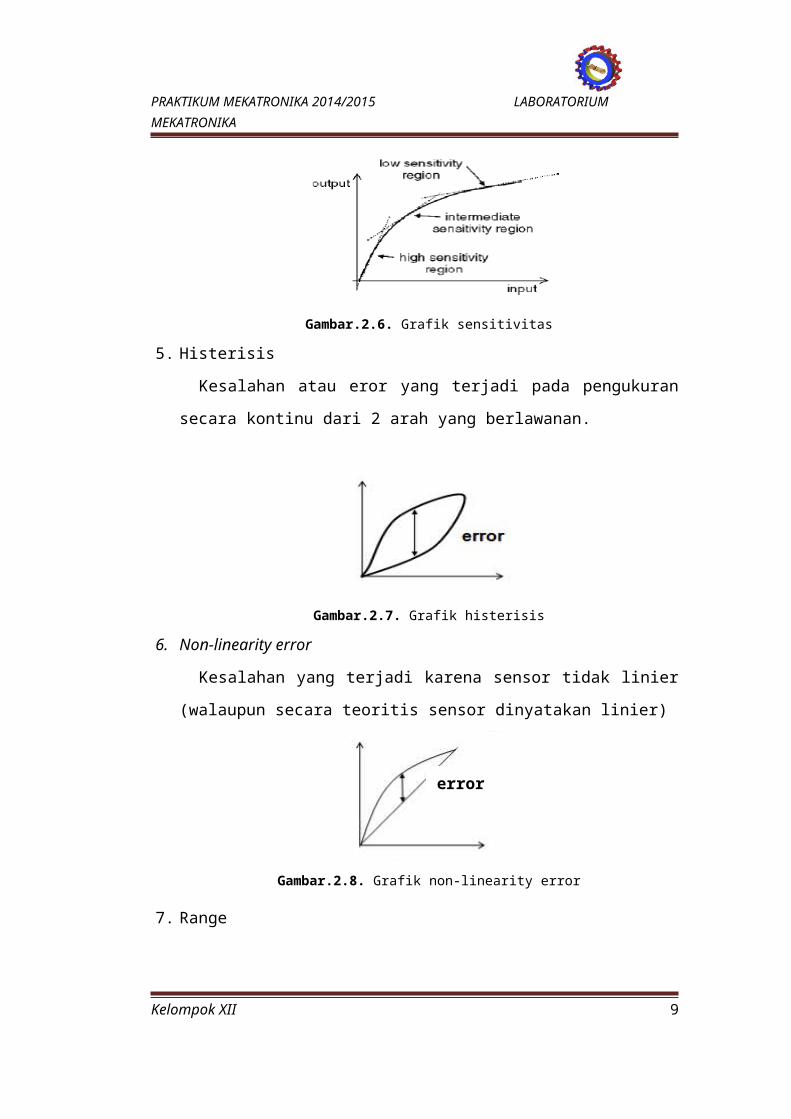
4. Sensitivitas
Kemampuan sensor merasakan suatu perubahan yang kecil.
Gambar.2.6. Grafik sensitivitas
5. Histerisis
Kesalahan atau eror yang terjadi pada pengukuran secara kontinu dari 2
arah yang berlawanan.
Gambar.2.7. Grafik histerisis
6. Non-linearity error
Kesalahan yang terjadi karena sensor tidak linier (walaupun secara teoritis
sensor dinyatakan linier)
Gambar.2.8. Grafik non-linearity error
7. Range
Jangkauan nilai atau besaran yang dapat dirasakan oleh sensor.
Kelompok XII 7
error

PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Jenis-jenis sensor :
Berdasarkan kondisi kerja :
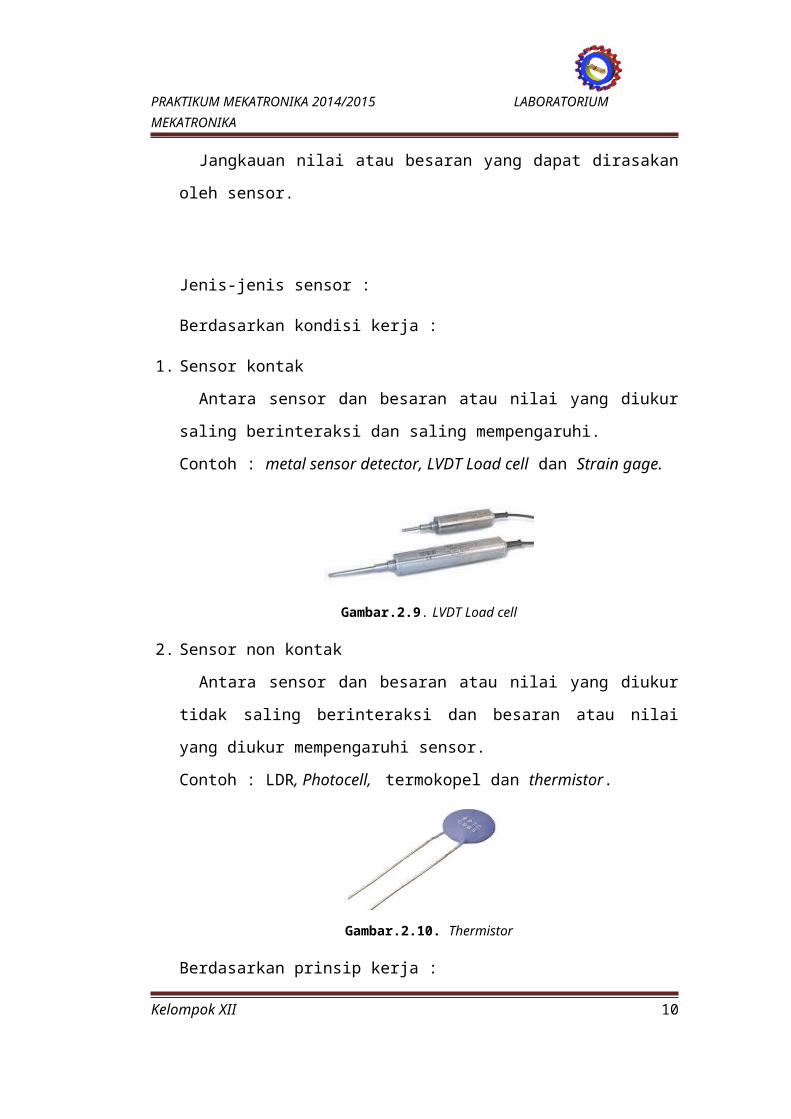
1. Sensor kontak
Antara sensor dan besaran atau nilai yang diukur saling berinteraksi dan
saling mempengaruhi.
Contoh : metal sensor detector, LVDT Load cell dan Strain gage.
Gambar.2.9. LVDT Load cell
2. Sensor non kontak
Antara sensor dan besaran atau nilai yang diukur tidak saling berinteraksi
dan besaran atau nilai yang diukur mempengaruhi sensor.
Contoh : LDR, Photocell, termokopel dan thermistor.
Gambar.2.10. Thermistor
Berdasarkan prinsip kerja :
1. Sensor mekanik
Sensor yang berpengaruh terhadap perubahan mekanik.
Contoh : Strain gage dan Piezo elektrik.
Gambar.2.11. Strain gage dan Piezo elektrik
Kelompok XII 8
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
2. Sensor optik
Sensor yang berpengaruh terhadap perubahan cahaya.
Contoh : Photocell dan LDR.
Gambar.2.12. Photocell dan LDR
3. Sensor magnetik
Sensor yang berpengaruh terhadap perubahan secara magnetik.
Contoh : metal sensor detector.
Gambar.2.13. Metal sensor detector
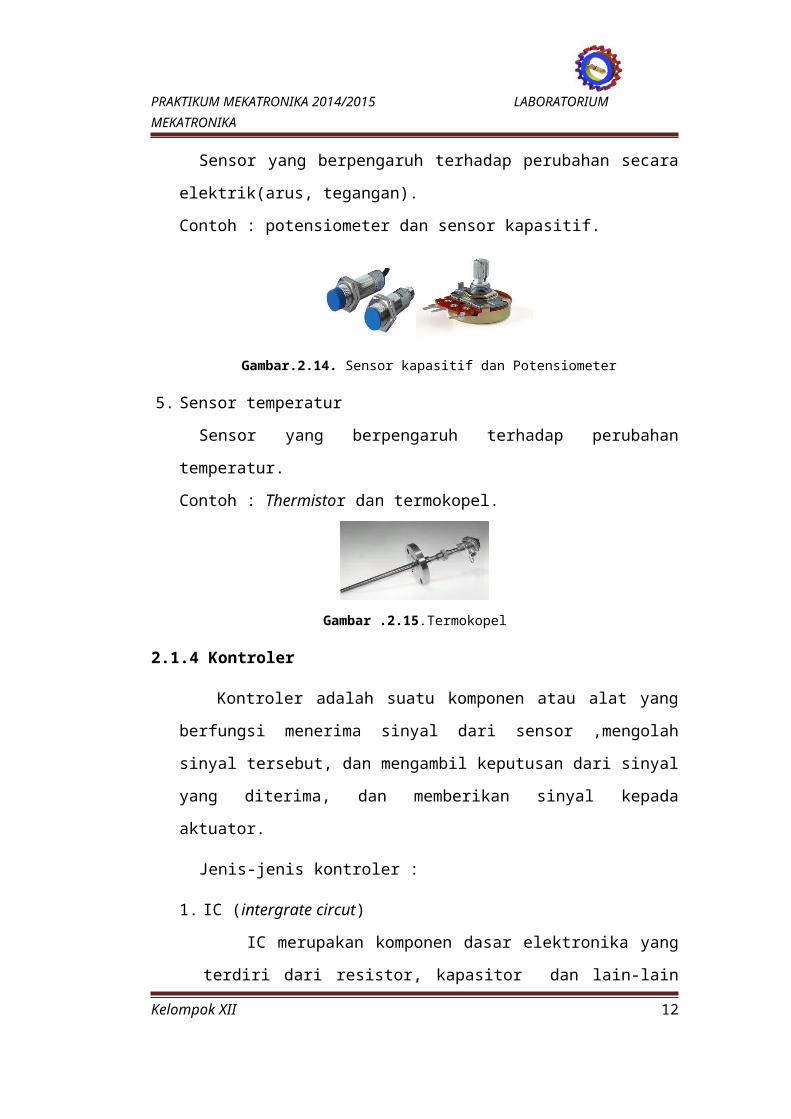
4. Sensor elektrik
Sensor yang berpengaruh terhadap perubahan secara elektrik(arus,
tegangan).
Contoh : potensiometer dan sensor kapasitif.
Gambar.2.14. Sensor kapasitif dan Potensiometer
5. Sensor temperatur
Sensor yang berpengaruh terhadap perubahan temperatur.
Contoh : Thermistor dan termokopel.
Gambar .2.15.Termokopel
Kelompok XII 9
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
2.1.4 Kontroler
Kontroler adalah suatu komponen atau alat yang berfungsi menerima
sinyal dari sensor ,mengolah sinyal tersebut, dan mengambil keputusan dari
sinyal yang diterima, dan memberikan sinyal kepada aktuator.
Jenis-jenis kontroler :
1. IC (intergrate circut)
IC merupakan komponen dasar elektronika yang terdiri dari
resistor, kapasitor dan lain-lain yang berfungsi sebagai otak atau
pengendali dari rangkaian
Gambar.2.16. IC(intergrate circut)
2. MC (microcontroller)
Microcontroller adalah suatu alat elektronika digital yang
mempunyai masukan dan keluaran serta kendali dengan program yang
bisa ditulis dan dihapus dengan cara khusus. Sederhananya, cara kerja
mikrokontroler sebenarnya hanya membaca dan menulis data.
Gambar.2.17. MC (micro controller)
3. PLC(programabble logic control)
PLC adalah suatu perangkat elektronik digital yang dapat
diprogram untuk melakukan operasi logik, sekuensial, aritmatik, timing,
dan counting untuk mengontrol mesin atau proses.
Kelompok XII 10

PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Gambar.2.18. PLC(programabble logic control)
4. MP (mikroprocessor)
Mikroprocessor adalah sebuah central processing unit (CPU)
elektronik komputer yang terbuat dari transistor mini dan sirkuit lainnya
di atas sebuah sirkuit terintegrasi semikonduktor.
Gambar.2.19. MP (mikro processor)
5. PC(personal Computer)
Personal Computer adalah alat yang dipakai untuk mengolah data
menurut prosedur yang telah dirumuskan.
Gambar.2.20. PC (personal komputer)
2.1.5 Aktuator
Aktuator adalah suatu komponen atau alat sebagai pengeksekusi
sinyal yang diterima dari kontroller atau menghasilkan sebuah perubahan
secara fisik.
Kelompok XII 11
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Jenis-jenis aktuator :
1. Aktuator elektromekanik
Aktuator yang menggunakan energi listrik untuk mengasilkan
perubahan secara mekanik (gerak).
Contoh : roda gigi dan belt.
Gambar.2.21. Belt
2. Aktuator material aktif
Aktuator yang apabila dialiri arus listrik materialnya dapat
mengeluarkan cahaya.
Contoh : LED( (Light Emiting Dioda).
Gambar.2.22. LED
3. Aktuator tenaga fluida
Aktuator yang menggunakan tekanan fluida sebagai penyebab
gerakan. Aktuator tenaga fluida terbagi atas 2 yaitu :
a. Pnuematic
Aktuator yang menggunakan tekanan udara sebagai penyebab
adanya gerakan.
Contohnya : Pnuematic slinder.
Kelompok XII 12
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
Gambar.2.23.Pnuematic slinder
b. Hidrolik
Aktuator yang menggunakan tekanan cairan sebagai penyebab
adanya gerakan.
Contohnya : dongkrak hidrolik.
Gambar.2.24. Dongkrak hidrolik
2.1.6 Sinyal
Sinyal ada 2 yaitu :
• Sinyal analog
Sinyalnya kontinu terhadap fungsi waktu.Misalnya: sinyal yang keluar
dari sensor analog atau sinyal radio.
Gambar.2.25. Grafik sinyal analog
Kelompok XII 13
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
• Sinyal digital
Sinyal tidak kontinu (diskrit) terhadap fungsi waktu. Biasanya terdiri dari
hanya 2 level sinyal seperti hidup/mati, ya/tidak, true/false, open/closed.
Misalnya: sinyal yang keluar dari mikroprocessor.
Gambar.2.26. Grafik sinyal digital
2.1.7 Sistem bilangan
Sistem bilangan adalah suatu cara penulisan angka menggunakan simbol-
simbol tertentu.
Jenis-jenis bilangan :
a. Bilangan biner
Yaitu bilangan yang terdiri dari angka 1 dan 0.
Contoh:
101101 artinya 1 x 25 + 0 x 24 + 1 x 23 + 1 x 22 + 0 x 21 + 1 x 20
50 desimal = 1 x 25 + 1 x 24 + 0 x 23 + 0 x 22 + 1 x 21 + 0 x 20
= 110010 biner
b. Bilangan desimal
Yaitu bilangan yang terdiri dari angka 0,1,2,3,4,5,6,7,8 dan 9.
Contoh :
34618 artinya 3 x 104 + 4 x 103 + 6 x 102 + 1 x 101 + 8 x 100
40 octa = 4 x 81 + 0 x 80 = 32 desimal
12B hexa = 1 x 162 + 2 x 161 + 11 x 160 = 299 desimal
Kelompok XII 14
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
c. Bilangan heksa
Yaitu bilangan berbasis 16 yang terdiri dari angka 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A,
B, C, D, E dan F.
Contoh :
BC artinya 11 x 161 + 12 x 160
50 desimal = 3 x 161 + 2 x 160
= 32 heksa
d. Bilangan octa
Yaitu bilangan berbasis 8 yang terdiri dari angka 0,1,2,3,4,5,6 dan 7.
15 artinya 1 x 81 + 5 x 80
50 desimal = 6 x 81 + 2 x 80
= 62 octa
Tabel.2.1. Sistem bilangan.
Biner Desimal Heksa Octa
0 0 0 0 0 0 0
0 0 0 1 1 1 1
0 0 1 0 2 2 2
0 0 1 1 3 3 3
0 1 0 0 4 4 4
0 1 0 1 5 5 5
0 1 1 0 6 6 6
0 1 1 1 7 7 7
1 0 0 0 8 8 10
1 0 0 1 9 9 11
1 0 10 10 A 12
1 0 1 1 11 B 13
1 1 0 0 12 C 14
1 1 0 1 13 D 15
1 1 1 0 14 E 16
1 1 1 1 15 F 17
Kelompok XII 15
PRAKTIKUM MEKATRONIKA 2014/2015 LABORATORIUM MEKATRONIKA
2.1.8 Aplikasi Mekatronika
Salah satu aplikasi sederhana dari mekatronika adalah pada lampu kebun
atau teras Rumah, On ( hidup ) dan Off ( mati ) Secara otomatis rangkaian ini
dapat digunakan untuk menghidupkan lampu kebun atau teras dan mati secara
otomatis. Lampu akan hidup dengan sendirinya pada saat keadaan gelap ( malam
hari ) dan lampu akan mati dengan sendirinya ,jika keadan sudah terang ( pagi hari
).
Gambar.2.27. Rangkaian pada lampu otomatis
Cara Kerja Rangkaian :
Bila rangkaian seperti gambar diatas. yaitu switch 3 ( S3 ) pada kondisi On (
hidup ) dan posisi switch 2 ( S2 ) On ( hidup ) serta keadaan switch 1 ( S1 ) Off
( mati ), maka rangkaian akan bekerja sebagai lampu kebun ( teras ) yang On dan
Off secara otomatis, dimana pada saat LDR menerima cahaya maka tahanan LDR
akan menurun. Pada saat lampu atau outpu tnya dihubungkan ke relay dengan
kondisi NO ( Normali Open ), relay akan berbalik keadaan ( Komparator )
sehingga membuat lampunya tidak aktif (mati ). Sebaliknya pada saat keadaan
gelap tahanan LDR akan membesar, maka lampu yang dihubungkan dengan relay
pada kondisi NO ( Normali Open ) akan On ( Hidup ).
Kelompok XII 16