evaluaciÓn de mÉtodos de anÁlisis inelÁstico en sap para estructuras de … · 2018-12-07 ·...
TRANSCRIPT
PONTIFICIA UNIVERSIDAD CATOLICA DE CHILE
ESCUELA DE INGENIERIA
EVALUACIÓN DE MÉTODOS DE
ANÁLISIS INELÁSTICO EN SAP PARA
ESTRUCTURAS DE HORMIGÓN
ARMADO
EDUARDO JOSÉ MEDINA MONCAYO
Tesis para optar al grado de
Magíster en Ciencias de la Ingeniería
Profesor Supervisor:
RAFAEL RIDDELL C.
Santiago de Chile, (Agosto, 2010)
© 2010, Eduardo José Medina Moncayo
PONTIFICIA UNIVERSIDAD CATOLICA DE CHILE
ESCUELA DE INGENIERIA
EVALUACIÓN DE MÉTODOS DE
ANÁLISIS INELÁSTICO EN SAP PARA
ESTRUCTURAS DE HORMIGÓN
ARMADO
EDUARDO JOSÉ MEDINA MONCAYO
Tesis presentada a la Comisión integrada por los profesores:
RAFAEL RIDDELL C.
JORGE VÁSQUEZ P.
RODRIGO MUJICA V.
MARIO DURAN T.
Para completar las exigencias del grado de
Magíster en Ciencias de la Ingeniería
Santiago de Chile, (Agosto, 2010)

ii
A mi Madre, hermana, mi novia linda y
amigos, que me apoyaron mucho.

iii
AGRADECIMIENTOS
Agradezco a todos aquellos que de una forma u otra ayudaron y apoyaron la realización
de esta investigación.
Al profesor Rafael Riddell que con su continuo apoyo y consejos oportunos lograron el
fin término de este trabajo.
iv
ÍNDICE GENERAL
Pág
DEDICATORIA ...................................................................................................... ii
AGRADECIMIENTOS ........................................................................................... iii
ÍNDICE DE TABLAS ............................................................................................. vi
ÍNDICE DE FIGURAS ............................................................................................ vii
RESUMEN ............................................................................................................... viii
ABSTRACT ............................................................................................................. ix
1. INTRODUCCIÓN ……………………………………………………… 1
1.1 General……………………………………………………………… 1
1.2 Investigación Bibliográfica ………………………………………… 5
1.2.1 Curvas esfuerzo deformación materiales usados en SAP2000 … 5
1.2.2 Parámetros no lineales usados en SAP2000 …………………… 21
1.2.3 Observaciones del modelamiento del hormigón armado ……… 32
1.3 Contenido del estudio ………………………………………………. 57
2. IMPLEMENTACIÓN MATEMÁTICA DEL MARCO DE CONCRETO
REFORZADO EXPERIMENTALMENTE ANALIZADO BAJO
DESPLAZAMIENTOS CONTROLADOS
POR SOZEN Y GULKAN 1971 ………………………………………. 59
2.1 Evaluación del modelo matemático usando metodologías
tradicionales en SAP2000 V.11. ………………………………………. 61
2.1.1 Evaluación del modelo matemático usando “Hinges” como
elementos inelásticos ………………………………………………. 61
2.1.2 Evaluación del modelo matemático usando “Links como
elementos inelásticos ………………………………………………. 84
2.1.3 Evaluación del modelo matemático usando el método del
v
Puntal-Tensor (Modelo S3) ………………………………………….. 88
2.1.4 Propuesta modelo híbrido Puntal-Tensor ……………………. 95
2.2 Análisis de los problemas encontrados en la implementación del
modelo del marco Sozen y Gulkan. ………………………………….. 98
3. VIGA EN VOLADIZO DE BERTERO, POPOV Y WANG (1974) …. 100
3.1 Evaluación del modelo matemático usando metodologías
tradicionales en SAP2000 V.11 ………………………………………. 100
3.2 Evaluación del modelo matemático usando el método del Puntal-
Tensor (Modelo S3) …………………………………………………… 104
3.3 Propuesta modelo híbrido Puntal-Tensor …………………………. 107
3.4 Análisis de los problemas encontrados en la implementación de la
Viga de Popov …………………………………………………………. 109
4. ESTUDIO EN SIMULADOR SÍSMICO DE UN MARCO DE HORMIGÓN
ARMADO, P. HIDALGO Y R. W. CLOUGH 1974
…………………………………………………………………………. 110
4.1 Evaluación del modelo matemático usando metodologías
tradicionales en SAP2000 V.11 ………………………………………. 114
4.2 Evaluación del modelo matemático usando el método del Puntal-
Tensor ………………………………………………………………… 116
4.3 Propuesta modelo Híbrido Puntal-Tensor ………………………. 120
4.4 Análisis de los problemas encontrados en la implementación del
Pórtico de Hidalgo-Clough …………………………………………… 123
CONCLUSIONES ………………………………………………………………… 124
BIBLIOGRAFIA ……………………………………………………………… 127

vi
A N E X O S …………………………………………………………………... 132
Anexo A : Procedimiento matemático de SAP ante input de desplazamiento…... 132
Anexo B: (Marco Sozen-Gulkan) respuesta cíclica; Modelo matemático usando
“Hinges” como elemento inelástico ……………………………………………. 133
vii
ÍNDICE DE TABLAS
Pág.
Tabla 1-1 Resultados comparativos del comportamiento inelástico de Links en
SAP2000…………………………………………………………………………… 31
Tabla 1-2 Resistencia efectiva de elementos “Strut” de hormigones aplicadas en regiones
D de sistemas de nudos. ……………………….………………………… 57
viii
ÍNDICE DE FIGURAS
Pág.
Fig. 1-1 Curvas de esfuerzo deformación para el acero de refuerzo …………… 6
Fig. 1-2 Regiones en la curva de esfuerzo deform acero de refuerzo ………….. 7
Fig. 1-3 Curva esfuerzo deform modelo simple hormigón armado ….…….. 10
Fig. 1-4 Curva del modelo no confiando de Mander ……………………………. 14
Fig. 1-5 Curva esfuerzo deform para el modelo confinado de Mander………… 15
Fig. 1-6 Curva de esfuerzo deform para el modelo confinado y no confinado de mander
…………………………………………………………………………………. 20
Fig. 1-7 Curva A-B-C-D-E-F de fuerza desplazamiento la misma curva es usada para el
caso de momento rotación ……………………………………………………… 24
Fig. 1-8 Representación de la definición de los links en SAP2000 ……………. 26
Fig. 1-9 Características del Link no lineal ……………………………………… 28
Fig. 1-10 Ejemplo y características del modelo inelástico …………………….. 29
Fig. 1-11 Comportamiento histerético de los links plásticos …………………… 29
Fig. 1-12 Comportamiento histerético Links (2) ……………………………….. 30
Fig. 1-13 Comportamiento histerético Links (3) ……………………………….. 31
Fig. 1-14 Respuesta del modelo inelástico implementado ……………………… 32
Fig. 1-15 Tipos de Degradación definidas por el FEMA 440 ………………….. 36
Fig. 1-16 Modelo elastoplástico de no degradación …………………………… 38
Fig. 1-17 Modelo de endurecimiento de resistencia sin degradación …………. 40
Fig. 1-18 Modelos de histéresis ……………………………………………….. 42
Fig. 1-19 Modelo de Pinching …………………………………………………. 43
ix
Fig. 1-20 Modelos combinados de degradación de rigidez y degradación cíclica de
resistencia (a) degradación moderada de rigidez y degradación cíclica de resistencia y (b)
degradación severa de rigidez y degradación de resistencia cíclica. (Ruiz-Garcia and
Miranda, 2005) ………………………………………………......................... 45
Fig. 1-21 Comportamiento histerético para modelos sujetos al protocolo de carga 1 con
(a) degradación de resistencia cíclica, (b) degradación en cada ciclo ……… 47
Fig. 1-22 Protocolo de carga 1 usado para ilustrar los efectos de degradación de
resistencia cíclica y en cada ciclo ……………………………………………. 47
Fig. 1-23 Protocolo de carga para ilustración de diferencias en degradación de resistencia
y degradación de resistencia en cada ciclo ……………………………………. 48
Fig. 1-24 Resultados historia de carga, ejemplo ……………………………… 48
Fig. 1-25 Descripción del modelo puntal-tensor ……………………………… 49
Fig. 1-26 Propiedades de esfuerzo deformación puntal-tensor. ……………… 51
Fig. 1-27 Propiedades del modelo puntal-tensor de esfuerzo deformación ….. 52
Fig. 1-28 Modelos STM de viga en voladizo (Modelo de N.H.T. To J. M. Ingham y B.J.
Davidson ……………………………………………………………………… 55
Fig 2.1 Esquema representativo del marco …………………………………… 59
Fig 2.2 Historia de desplazamientos controlados …………………………….. 60
Fig. 2.3 Elección de rotulas plásticas en SAP2000 …………………………… 63
Fig. 2.4 Figura No. 2.4 Definición rotulas pláticas de columnas …………….. 64
Fig. 2.5 Definición rotulas pláticas vigas SAP2000 ………………………….. 66
Fig. 2.6 Definición secciones transversales SAP2000 ……………………….. 68
Fig. 2.7 Definición sección de la Vigas SAP2000 …………………………… 69
Fig. 2.8 Definición de historia de Carga en SAP2000 ……………………….. 70
x
Fig. 2.9 Esquema Ubicación de rotulas plásticas ……………………………. 71
Fig. 2.10 Respuesta total del modelo de rotulas plásticas ……………………. 72
Fig. 2.11 Primer Ciclo de desplazamiento controlado ………………………. 73
Fig. 2.12 Corte basal para el primer ciclo …………………………………… 73
Fig. 2.13 Corte basal vs desplazamiento para el primer ciclo ………………. 74
Fig. 2.14 Comparación respuesta elástica e inelástica para el primer ciclo …. 75
Fig. 2.15 Push over Marco Sozen y Gulcan …………………………………. 76
Fig. 2.16 Comparación corte basal vs desplaz. con Takeda y Kinematic …… 77
Fig. 2.17 Comparación pushover con Takeda y Kinematic para rótulas plásticas 77
Fig. 2.18 Momento curvatura en la viga ……………………………………….. 78
Fig. 2.19 Momento curvatura de la columna ………………………………….. 79
Fig. 2.20 Comparación momento curvatura de la viga confinado y no confinado 79
Fig. 2.21 comparación momento curvatura columna confinada y no confinadas . 80
Fig. 2.22 Comparación V vs D para Takeda confinado y no confinado ………... 81
Fig. 2.23 Gráfica comparativa de historia de desplazamientos e historia de fuerzas 83
Fig. 2.24 Modelo en SAP2000 usando Links inelásticos ………………………. 84
Fig. 2.25 Loops experimentales vs modelo de links ……………………………. 86
Fig. 2.26 Representación de áreas equivalentes elementos longitudinales …….. 89
Fig. 2.27 Representación de áreas equivalentes elementos transversales ……… 90
Fig. 2.28 Representación de áreas equivalentes elementos diagonales ………… 91
Fig. 2.29 Configuración del modelo puntal tensor del marcos ………………… 93
Fig. 2.30 Loops experimentales vs modelo de puntal tensor ………………….. 94
Fig. 2.31 Loop ciclo experimental vs ciclo modelo puntal tensor …………….. 95
xi
Fig. 2.32 Modelo híbrido Marco Sozen ………………………………………. 96
Fig. 2.33 Resultados para el modelo híbrido puntal-tensor ………………….. 97
Fig. 3.1 Esquema viga 33 ……………………………………………………. 101
Fig. 3.2 Historia de desplazamiento Viga 33 ……………………………….. 102
Fig. 3.3 Esquema respuesta para el modelo SAP usando Hinges ……………. 103
Fig. 3.4 Esquema viga modelo puntal tensor …………………………………. 105
Fig. 3.5 Esquema respuesta para el modelo Puntal-Tensor ………………….. 106
Fig. 3.6 Modelo híbrido para el caso de la viga Popov ……………………… 108
Fig. 3.7 Respuesta modelo híbrido viga de Popov ………………………….. 109
Fig. 4.1 Sismo TAFT, N69W Comp, July 1953 …………………………….. 111
Fig. 4.2 Esquema del montaje experimental …………………………………. 113
Fig. 4.3 Modelo SAP de la estructura ………………………………………… 114
Fig. 4.4 Respuesta desplazamiento de Cubierta vs Tiempo ………………….. 115
Fig. 4.5 Respuesta desplazamiento de Entrepiso vs Tiempo …………………. 116
Fig. 4.6 Esquema pórtico modelo puntal tensor ………………………………. 118
Fig. 4.7 Respuesta desplazamiento de Cubierta vs Tiempo …………………… 119
Fig. 4.8 Respuesta desplazamiento de Entrepiso vs Tiempo ………………….. 119
Fig. 4.9 Modelo híbrido puntal-tensor …………………………………………. 121
Fig. 4.10 Respuesta desplaz de Cubierta vs Tiempo mod híbrido …………….. 122
Fig. 4.11 Respuesta desplazamiento de Entrepiso vs Tiempo …………………. 122
xii
RESUMEN
El objetivo principal de este trabajo es analizar y comparar el
comportamiento de estructuras típicas de hormigón armado bajo historias de carga,
desplazamientos y sismos con diferentes metodologías de modelamiento matemático.
Para lograr este objetivo se decidió escoger el programa comercial SAP
2000, ya que es el software más usado entre los ingenieros estructurales. Dentro del
mismo se escogieron diferentes elementos inelásticos para el modelamiento, como por
ejemplo links, hinges y por último se implementó el concepto de modelamiento a través
de metodología de puntal-tensor. Es importante aclarar que todos los modelos
implementados en este trabajo corresponden a estudios realizados en laboratorios de
diferentes partes de los Estados Unidos y cuentan con resultados experimentales de
importante uso para la comparación.
Entre los modelos implementados, está el pórtico de Sozen, la viga de Popov
y Bertero y el pórtico de 2 pisos realizado por Clough e Hidalgo. Los dos primeros
fueron ensayados con historia de desplazamiento, y el último bajo diferentes tipos de
sismos ocurridos en Norteamérica.
xiii
ABSTRACT
The main objective of this study is to analyze and compare the behavior of reinforced
concrete structures under typical load histories, movements and earthquakes with
different methods of mathematical modeling.
To achieve this objective it was decided to choose the commercial program SAP 2000,
as it is the most widely used software among structural engineers. Within the same
inelastic different elements were chosen for modeling, such as links, hinges and finally
implemented the concept of modeling methodology through prop-tensor. It is important
to clarify that all the models implemented in this paper are studies in laboratories in
different parts of the United States and experimental results have important use for
comparison.
Among the models implemented, is the gateway to Sozen, the beam of Popov and
Bertero and two-story portico by Clough and Hidalgo. The first two were tested with a
history of displacement, and the last under different types of earthquakes occurred in
North America.
1
1. INTRODUCCIÓN
1.1 General
La filosofía de diseño sismo resistente actual que se usa en Norteamérica y
Sudamérica tiene como objetivo fundamental prevenir el colapso de las estructuras
para un sismo severo y asegurar que no haya ningún tipo de daño para un sismo
frecuente. Sin embargo el estado del arte actual no puede garantizar el punto exacto
de comportamiento de los edificios, en otras palabras no está lo suficientemente
desarrollado como para explicar la capacidad real de las estructuras.
Los códigos modernos usan diferentes metodologías de análisis sísmico, como por
ejemplo: (1) Métodos estáticos lineales (LSP), (2) Métodos dinámicos lineales
(LDP), (3) Métodos estáticos no-lineales (NSP), (4) Método dinámico no-lineal
(DNP). Su nivel de precisión relativa se incrementa del (1) al (4). Sin embargo la
capacidad del software para realizar cada uno de estos métodos también se
aumenta. Adicionalmente la complejidad de los métodos lleva consigo una serie de
simplificaciones y suposiciones que dificultan la completa compresión de los
mismos.
En primera instancia los métodos de análisis estáticos lineales (LSP) se basan
principalmente en aplicar una fuerza lateral equivalente para obtener los
desplazamientos y las fuerzas de diseño. Dentro del mismo se asumen dos hipótesis
importantes; la primera es que el método implica que las acciones equivalentes de
diseño son capaces de representar la acción símica, lógicamente esto es una
2
simplificación que debe cumplir con los requerimientos para algunas edificaciones
de acuerdo con la norma de diseño. Por otro lado el método implica que se puede
obtener una medida adecuada de la estructura usando un modelo elástico lineal. La
pregunta que surge con estas dos importantes hipótesis es como lograr verificar la
estructura ante el colapso o como diseñar los elementos para lograr que se
deformen de acuerdo a su esperada ductilidad.
Otro de los métodos más usados actualmente es el método de análisis dinámico
lineal (LDP), esta metodología usa el mismo modelo lineal elástico que el LSP.
Cabe destacar que tampoco tiene en cuenta los efectos reales del comportamiento
no lineal. Para saber la demanda a la cual someteremos la estructura en este
método, se puede usar el espectro de diseño sísmico que imponga la norma para el
caso del método de análisis modal espectral o varios registros en el caso del método
de historia de respuesta.
En el método de análisis estático no lineal (NSP) las cargas estáticas laterales
equivalentes son aplicadas incrementalmente al modelo matemático de la
estructura, hasta que se sobrepasa una deformación esperada. Las deformaciones y
las fuerzas internas son monitoreadas continuamente. Es un procedimiento paralelo
al LSP, pero con dos diferencias importantes; primero, en el NSP, el
comportamiento no lineal entre la carga y la deformación de cada elemento
individual, se debe modelar directamente en el modelo matemático. Y en segunda
instancia, en el NSP los efectos sísmicos son definidos en términos de una
deformación esperada más que en una seudo carga lateral. Por tal motivo este
3
método define capacidades diferentes de comportamiento. Por último y no menos
importante esta metodología requiere mayor capacidad computacional que los
anteriores pero posee una mejor aproximación del comportamiento de las estructura
ante sismos, sin embargo, el método NSP se queda corto en los cambios no lineales
dinámicos de respuesta de la estructura causado por la degradación cíclica y la
distribución de resistencia. Por este motivo tiene deficiencias en la determinación
de fuerzas locales y demandas de deformaciones plásticas, particularmente cuando
los modos superiores tienen gran importancia en la influencia de la estructura.
El método de análisis dinámico no lineal (NDP), se basa en la solución de la
ecuación dinámica de movimiento a partir de varias excitaciones sísmicas, así
mismo considera la no linealidad de los materiales que componen los elementos, se
debe tener en cuenta que todas las masas del edificio deben ser definidas y ubicadas
de tal forma que capturen adecuadamente los efectos inerciales verticales y
horizontales.
A lo largo del tiempo, investigadores de todo el mundo han realizado ensayos
experimentales de elementos de hormigón armado, con el fin de comparar su
comportamiento real con respecto a las distintas metodologías antes expuestas,
entre ellos se encuentran; el marco de concreto reforzado de Sozen y Gulkan 1971,
siendo este un modelo a escala reducida que fue ensayado en la Universidad de
Illinois sujeto a desplazamiento cíclico controlado y cuya respuesta ha sido
ampliamente usada en casos semejantes obteniendo buenos resultados, por otro
lado viga en volado de Bertero, Popov y Wang 1974, ensayada en la Universidad
4
de California en Berkeley para investigar el efecto de grandes fuerzas de corte en la
resistencia, rigidez y capacidad de absorción de energía de hormigón armado y por
último, el pórtico realizado por Clough e Hidalgo, siendo este un estudio de
investigación de escala reducida, donde se estudia el comportamiento dinámico de
una estructura de dos pisos. Un alto porcentaje de los mismos han demostrado
inexactitudes entre los métodos analíticos y experimentales, lo que ha llevado a
varios métodos alternativos de análisis como por ejemplo el método analítico no
lineal del puntal-tensor.
El método de puntal-tensor (STM) es la representación discreta de un campo de
esfuerzos desarrollada en estructuras de hormigón armado sometidas a acciones
externas. El puntal y el tensor son elementos uniaxiales que determinan los campos
de esfuerzos de compresión y tensión respectivamente. Ahora bien, los puntos de
conexión de los puntales y tensores corresponden a zonas nodales de esfuerzos
biaxiales o triaxiales, donde se lleva a cabo un cambio de dirección de las fuerzas
internas.
El procedimiento convencional de diseño de estructuras de hormigón armado puede
dividirse en tres estados: (a) Seleccionar las dimensiones del elemento, (b)
Determinación de la cantidad, posición y detallamiento del refuerzo, de acuerdo a
criterios de resistencia última. (c) Satisfacción de las deformaciones bajo las cargas
de servicio. Tradicionalmente, el STM se ha utilizado sólo para el segundo estado
del diseño, sin embargo en este trabajo se usará como metodología de análisis
5
último prediciendo de buena forma la relación no lineal de fuerza deformación del
elemento.
El objetivo fundamental de este trabajo es utilizar metodologías convencionales de
análisis aplicadas a casos experimentales e investigaciones realizadas en años
anteriores para compararlas contra los resultados de aplicar el método de puntal-
tensor.
1.2 Investigación bibliográfica
1.2.1 Curvas esfuerzo deformación materiales usados en SAP2000
Todos los tipos de materiales tienen curvas de esfuerzo deformación representativa
y que son definidas a partir de una serie de parámetros característicos. El hormigón
y el acero de refuerzo en SAP2000 tienen definidos la posibilidad de especificar
dichos parámetros de acuerdo a una serie de modelos, como por ejemplo, el modelo
simple y el modelo de Mander y para el acero de refuerzo el modelo simple y el
modelo de Park.
Las curvas con las que cuenta SAP2000 se aplican a todos los materiales y están
definidas por una serie de puntos de esfuerzo deformación (ε,f). El primero de estos
puntos debe ser (0,0). El SAP2000 tiene la característica que las curvas
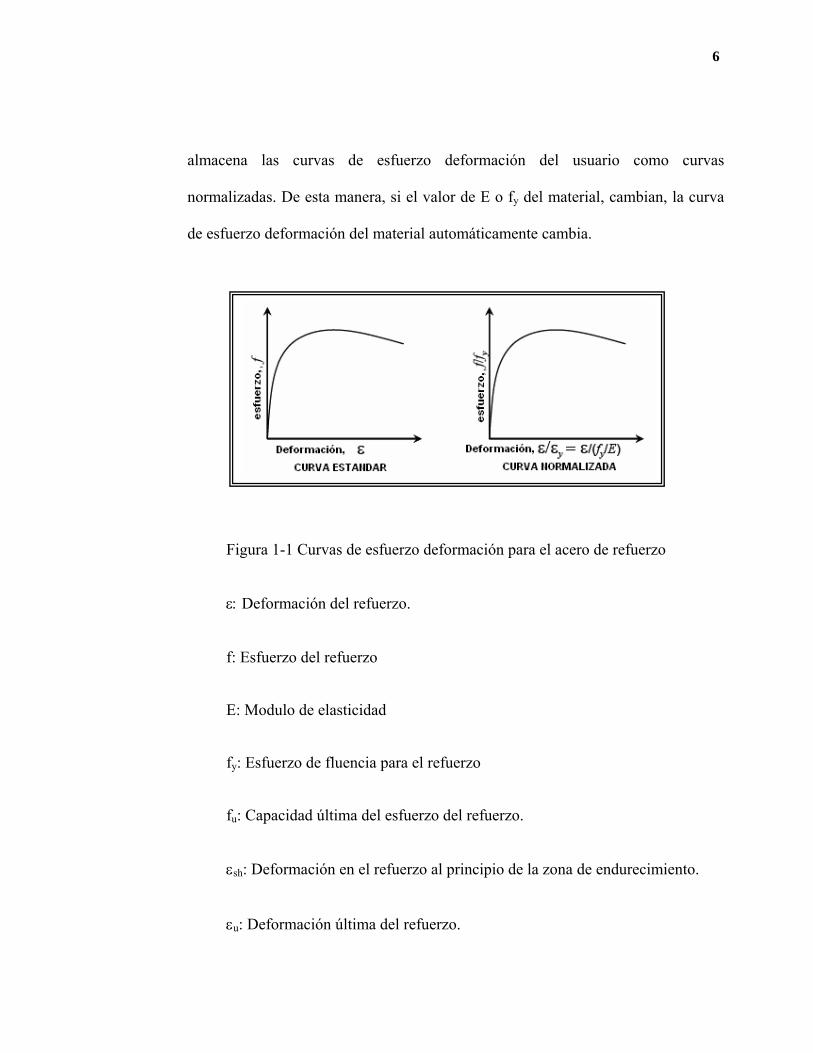
introducidas por el usuario pueden ser las estándares o normalizadas. Las curvas
normalizadas son graficadas f/fy versus ε/εy, Donde εy=fy/E, estas expresiones se
pueden ver con mayor claridad en las gráficas de la figura No. 1. El programa
6
almacena las curvas de esfuerzo deformación del usuario como curvas
normalizadas. De esta manera, si el valor de E o fy del material, cambian, la curva
de esfuerzo deformación del material automáticamente cambia.
Figura 1-1 Curvas de esfuerzo deformación para el acero de refuerzo
ε: Deformación del refuerzo.
f: Esfuerzo del refuerzo
E: Modulo de elasticidad
fy: Esfuerzo de fluencia para el refuerzo
fu: Capacidad última del esfuerzo del refuerzo.
εsh: Deformación en el refuerzo al principio de la zona de endurecimiento.
εu: Deformación última del refuerzo.
7
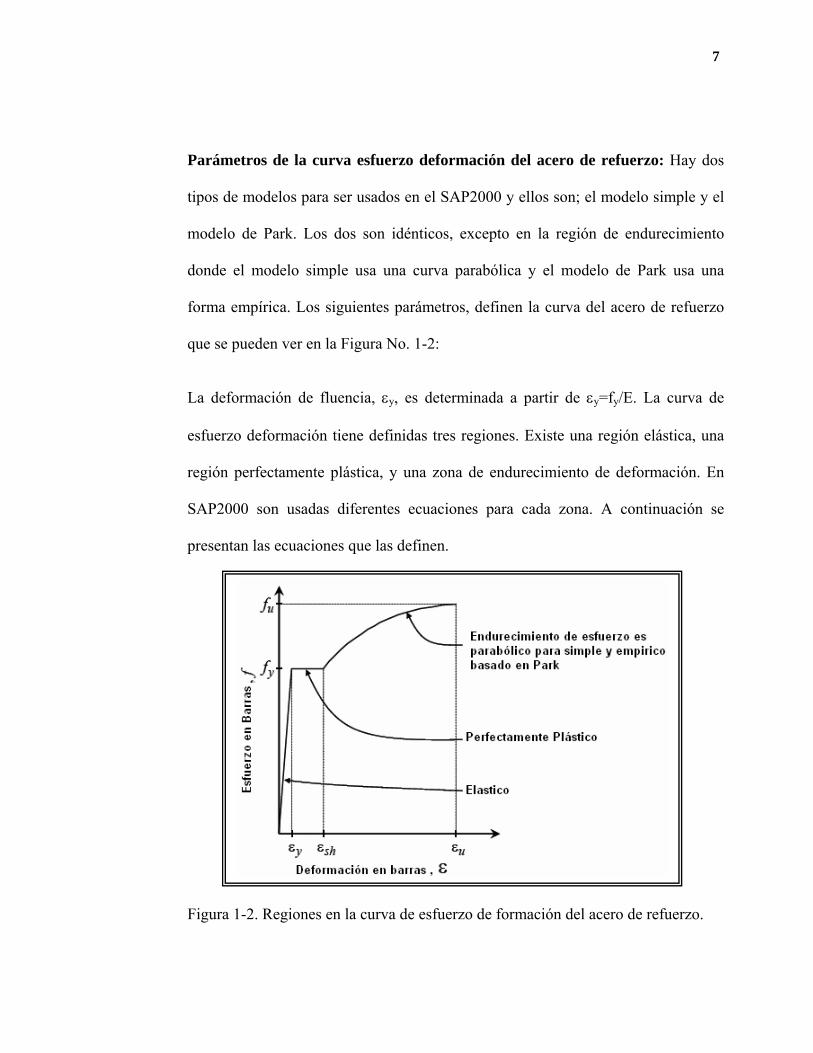
Parámetros de la curva esfuerzo deformación del acero de refuerzo: Hay dos
tipos de modelos para ser usados en el SAP2000 y ellos son; el modelo simple y el
modelo de Park. Los dos son idénticos, excepto en la región de endurecimiento
donde el modelo simple usa una curva parabólica y el modelo de Park usa una
forma empírica. Los siguientes parámetros, definen la curva del acero de refuerzo
que se pueden ver en la Figura No. 1-2:
La deformación de fluencia, εy, es determinada a partir de εy=fy/E. La curva de
esfuerzo deformación tiene definidas tres regiones. Existe una región elástica, una
región perfectamente plástica, y una zona de endurecimiento de deformación. En
SAP2000 son usadas diferentes ecuaciones para cada zona. A continuación se
presentan las ecuaciones que las definen.
Figura 1-2. Regiones en la curva de esfuerzo de formación del acero de refuerzo.
8
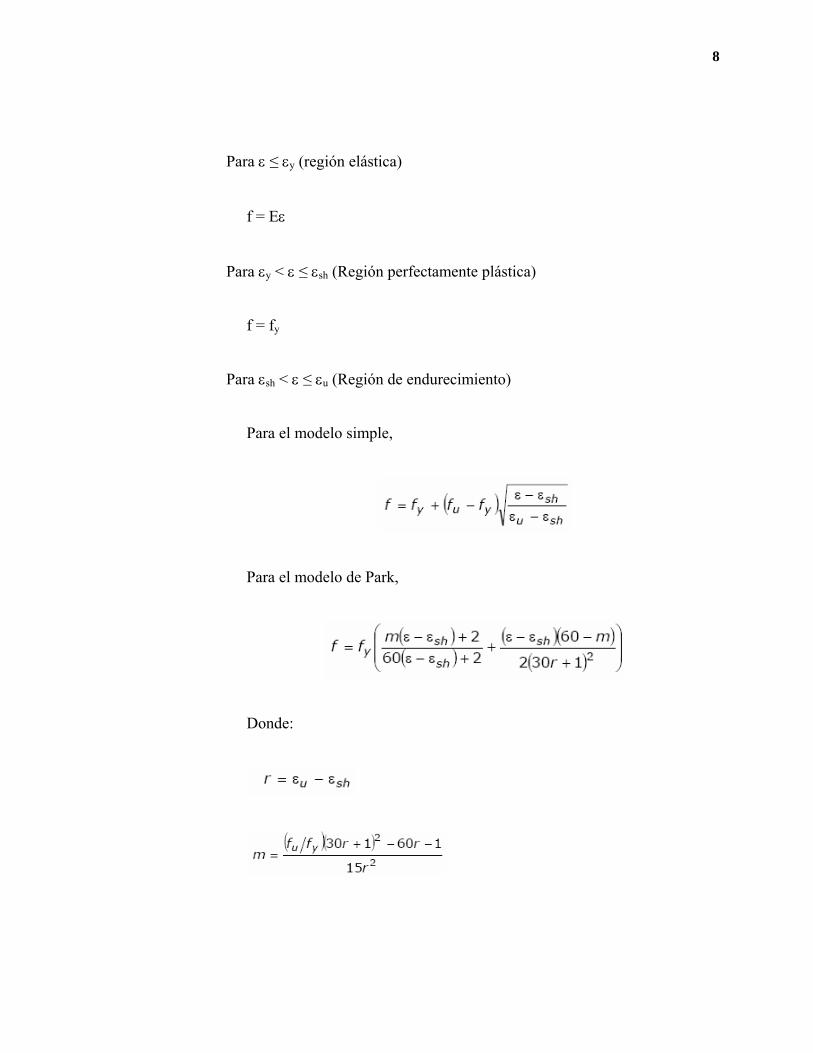
Para ε ≤ εy (región elástica)
f = Eε
Para εy < ε ≤ εsh (Región perfectamente plástica)
f = fy
Para εsh < ε ≤ εu (Región de endurecimiento)
Para el modelo simple,
Para el modelo de Park,
Donde:
9
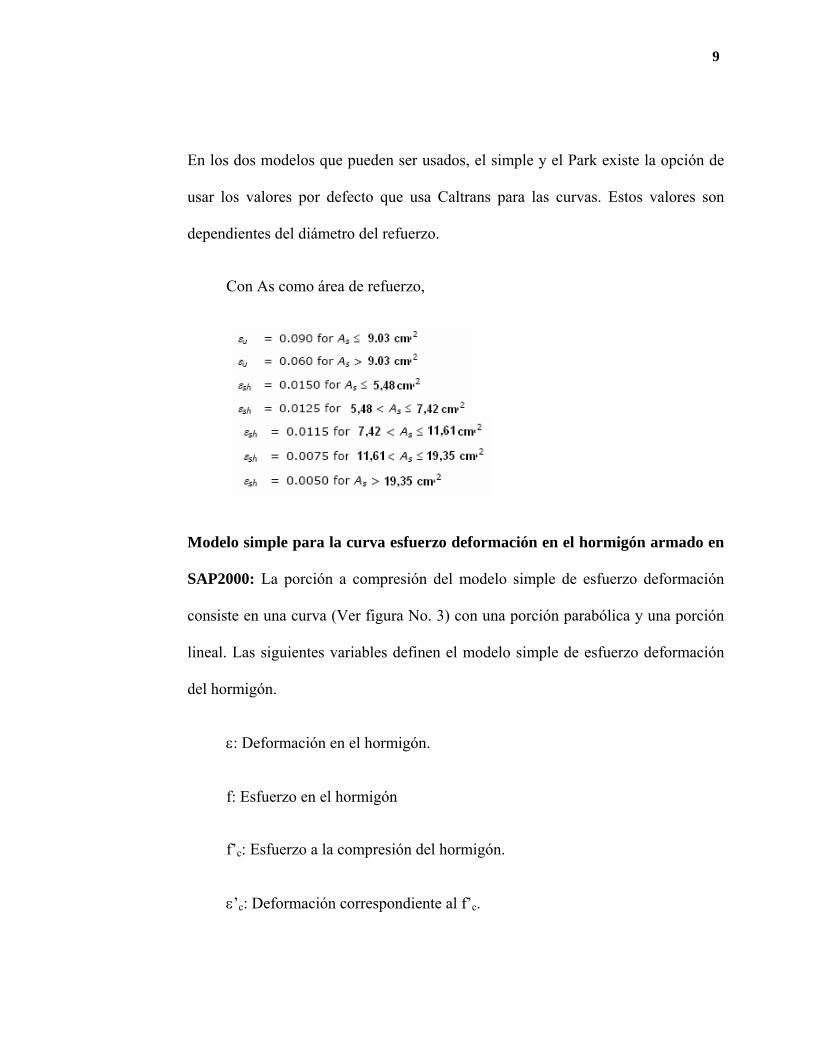
En los dos modelos que pueden ser usados, el simple y el Park existe la opción de
usar los valores por defecto que usa Caltrans para las curvas. Estos valores son
dependientes del diámetro del refuerzo.
Con As como área de refuerzo,
Modelo simple para la curva esfuerzo deformación en el hormigón armado en
SAP2000: La porción a compresión del modelo simple de esfuerzo deformación
consiste en una curva (Ver figura No. 3) con una porción parabólica y una porción
lineal. Las siguientes variables definen el modelo simple de esfuerzo deformación
del hormigón.
ε: Deformación en el hormigón.
f: Esfuerzo en el hormigón
f’c: Esfuerzo a la compresión del hormigón.
ε’c: Deformación correspondiente al f’c.
10
εu: Deformación última del hormigón.
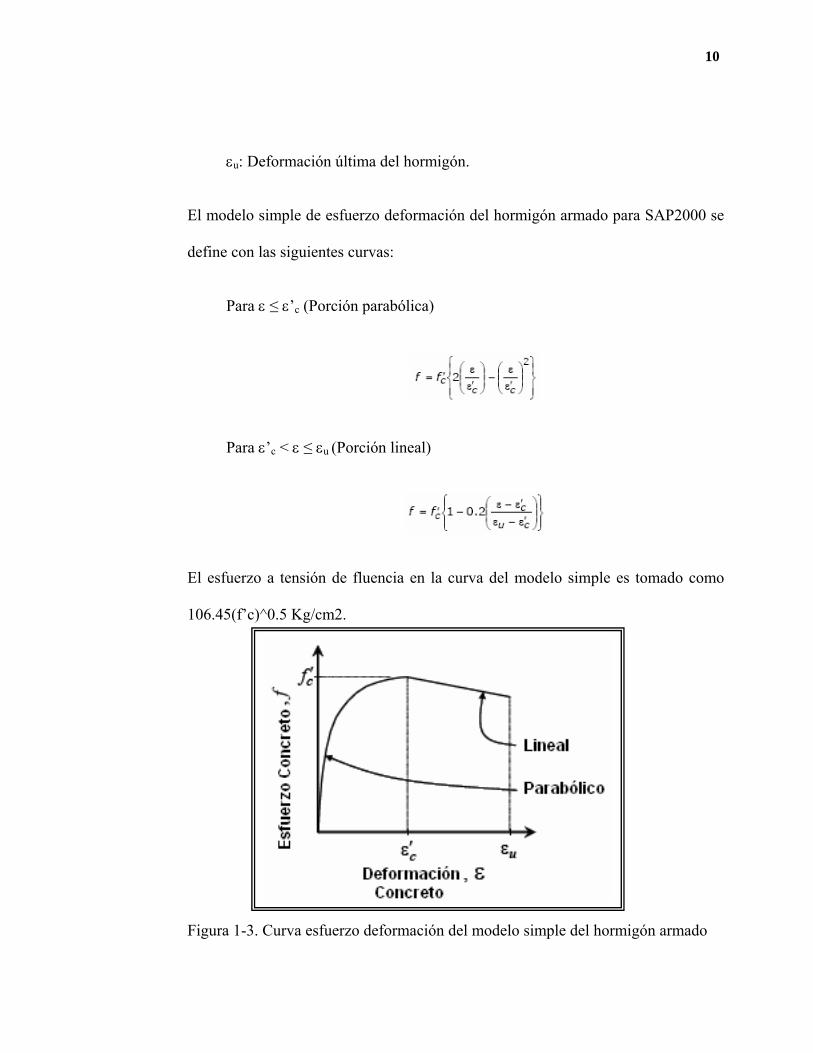
El modelo simple de esfuerzo deformación del hormigón armado para SAP2000 se
define con las siguientes curvas:
Para ε ≤ ε’c (Porción parabólica)
Para ε’c < ε ≤ εu (Porción lineal)
El esfuerzo a tensión de fluencia en la curva del modelo simple es tomado como
106.45(f’c)^0.5 Kg/cm2.
Figura 1-3. Curva esfuerzo deformación del modelo simple del hormigón armado
11
Modelo Mander para la curva esfuerzo deformación en el hormigón armado
en SAP2000:
El modelo de Mander esfuerzo deformación está basado en el siguiente documento:
Mander, J.B., M.J.N. Priestley, and R. Park 1984. Theoretical Stress-Strain Model
for Confined Concrete. Journal of Structural Engineering. ASCE. 114(3). 1804-
1826.
El modelo de Mander de hormigón armado calcula la resistencia a la compresión y
la deformación última como función del confinamiento (Refuerzo transversal) del
acero. En el SAP2000 son posibles los siguientes tipos de curvas esfuerzo
deformación según el modelo de Mander.
• Mander – Concreto no confinado.
• Mander – Concreto Confinado – Sección Rectangular.
• Mander – Concreto Confinado – Sección Circular.
Para el caso del modelo no confinado de Mander puede ser generado a partir de las
propiedades del material solamente. Para el modelo de Mander confinado se
requiere las propiedades del material y de la sección transversal. Para SAP 2000 las

12
siguientes secciones tienen las características asociadas al modelo confinado de
Mander:
• Sección rectangular
• Sección circular.
Ahora bien, para el caso en el que se desea definir la sección transversal se puede
definir el modelo confinado de Mander a partir de las siguientes secciones:
• Solido Rectangular
• Solido circular
• Polinomio.
• Hexágono de Caltrans
• Octágono de Caltrans.
• Circular de Caltrans.
• Cuadrado de Caltrans
Cuando un material con las características apropiadas es definido para el modelo de
Mander confinado, el SAP2000 lo usa. En caso contrario el software usará el
modelo de esfuerzo deformación no confinada de Mander para el hormigón
armado.
13
Curva del modelo no confinado de Mander para el hormigón armado: La
porción de compresión del modelo de esfuerzo deformación no confinado de
Mander consiste en una porción curva y en una porción lineal. Los siguientes
parámetros definen la curva en mención
ε: Deformación del hormigón.
f: Esfuerzo del hormigón.
E: Modulo de elasticidad
f’c: Resistencia a la compresión del hormigón
ε’c: Deformación del hormigón f’c.
εu: Capacidad última de deformación del hormigón.
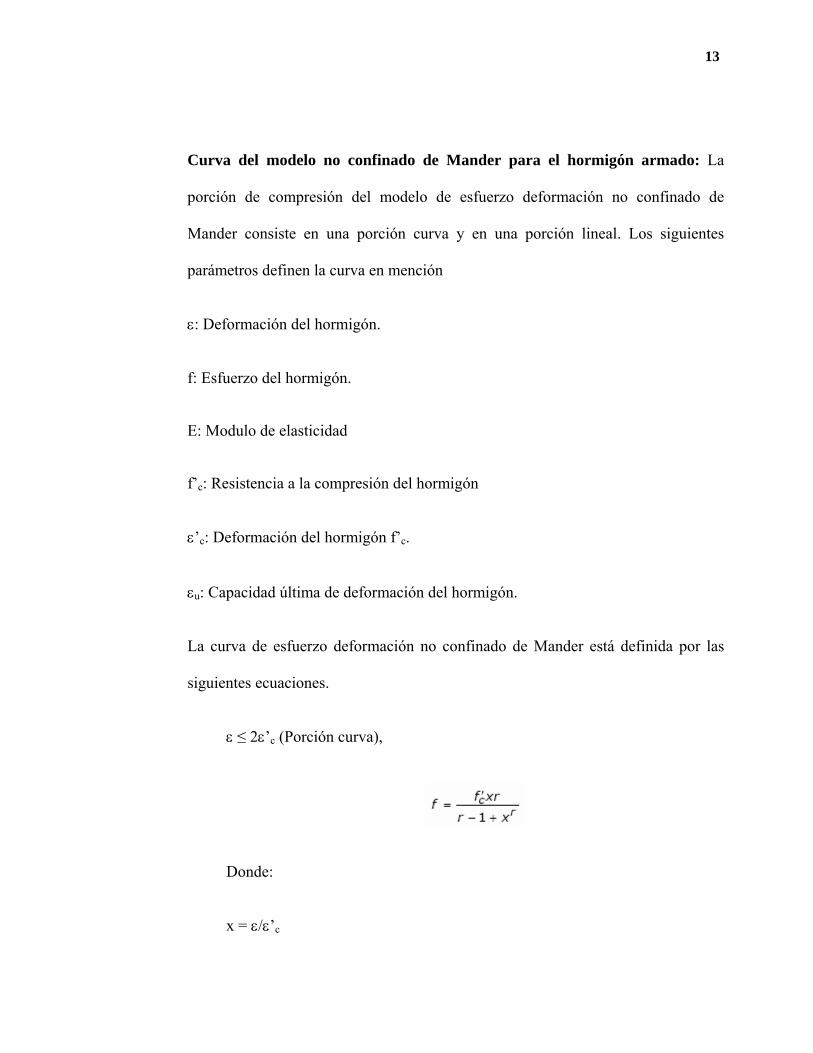
La curva de esfuerzo deformación no confinado de Mander está definida por las
siguientes ecuaciones.
ε ≤ 2ε’c (Porción curva),
Donde:
x = ε/ε’c

14
Para 2ε’c < ε ≤ εu (Porción lineal),
Donde r fue definido previamente. La resistencia a tensión del modelo no confinada
se toma como 106.45(f’c)^0.5 Kg/cm2.
Figura 1-4. Curva del modelo no confinado de Mander
Curva del modelo confinado de Mander para el hormigón armado: Para la
porción a compresión del modelo confinado de esfuerzo deformación, la resistencia
a la compresión y la deformación última del concreto confinado está basada en el
confinamiento (Refuerzo transversal) del acero. Los siguientes parámetros son
definidos para el modelo de esfuerzo deformación
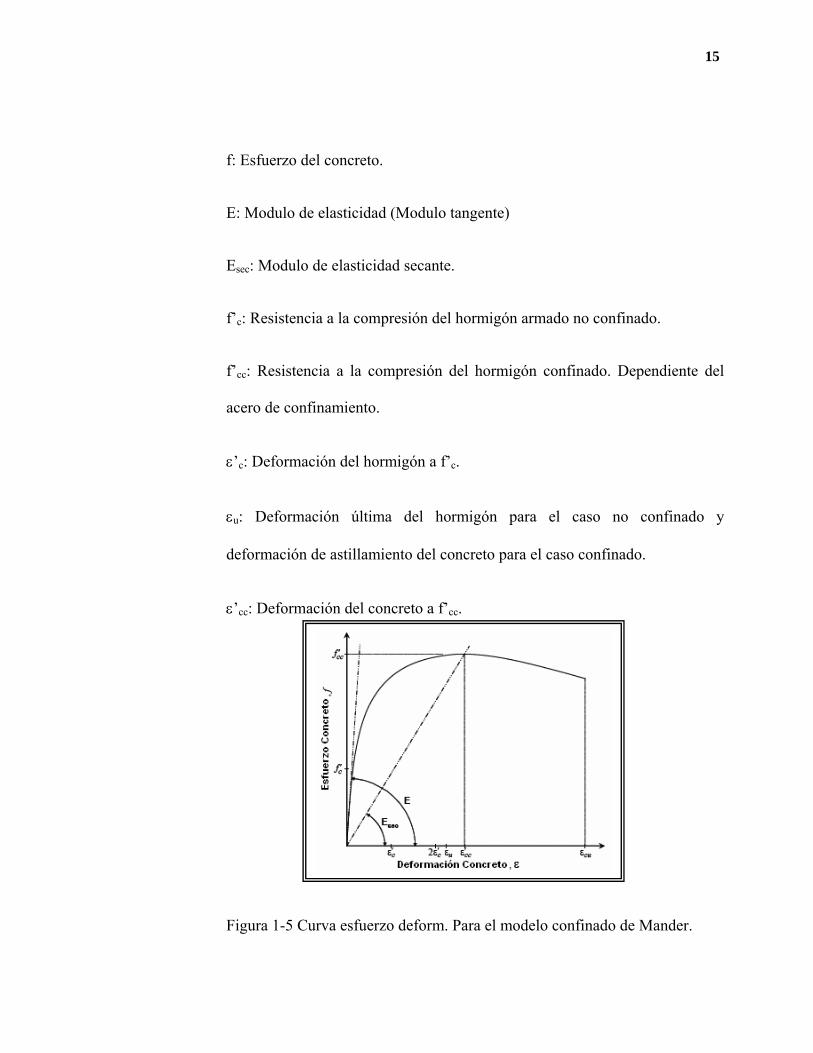
ε: Deformación concreto.
15
f: Esfuerzo del concreto.
E: Modulo de elasticidad (Modulo tangente)
Esec: Modulo de elasticidad secante.
f’c: Resistencia a la compresión del hormigón armado no confinado.
f’cc: Resistencia a la compresión del hormigón confinado. Dependiente del
acero de confinamiento.
ε’c: Deformación del hormigón a f’c.
εu: Deformación última del hormigón para el caso no confinado y
deformación de astillamiento del concreto para el caso confinado.
ε’cc: Deformación del concreto a f’cc.
Figura 1-5 Curva esfuerzo deform. Para el modelo confinado de Mander.

16
εcu: Deformación última del hormigón para el caso del hormigón confinado;
esta variable es dependiente del acero de confinamiento, provista en la
sección.
El esfuerzo del concreto está definido por la siguiente ecuación:
Donde:
Resistencia a la compresión del hormigón en el modelo confinado de Mander
f’cc. : Las siguientes variables son usadas en la definición de la resistencia:
Ac: Área del centro del hormigón medida desde eje central hasta el eje central
del acero de confinamiento.
Acc: Área del centro de hormigón excluyendo el refuerzo longitudinal;
Acc=Ac(1-ρcc).
Ae: Área efectiva realmente confinada.
17
Asc: Área del estribo circular o de la espiral de confinamiento.
AsL: Área total de todos los refuerzos longitudinales.
Asx: Área del estribo rectangular extendido en la dirección X-X.
Asy: Área del estribo rectangular en la dirección Y-Y.
bc: Distancia eje centroidal a eje centroidal entre el perímetro rectangular del
estribo que se extiende en la dirección Y-Y.
dc: Distancia eje centroidal a eje centroidal entre el perímetro rectangular del
estribo que se extiende en la dirección X-X.
ds: diámetro del estribo circular o del espiral del acero de confinamiento
desde el eje centroidal al eje centroidal del acero.
f’c: Resistencia a la compresión del hormigón armado no confinado.
fL: Presión lateral en el hormigón confinado provista por el acero de
confinamiento.
f’L: Presión efectiva lateral en el concreto confinado provista por el acero de
confinamiento.
fyh: Esfuerzo de fluencia del acero de confinamiento.
Ke: Coeficiente que mide la efectividad del acero de confinamiento.
18
S: Distancia longitudinal desde el eje centroidal al eje centroidal entre el
estribo o espiral.
s’: Distancia libre longitudinal entre el estribo o espiral.
w’: Distancia transversal libre entre las barras adyacentes longitudinales con
los cruces.
ρcc: Cuantía de acero longitudinal; ρcc=AsL/Ac.
ρs: Cuantía volumétrica del refuerzo transversal de confinamiento al centro
de concreto.
ρx: Cuantía de acero para los estribos rectangulares extendiéndose a lo largo
de la dirección X-X; ρx=Asx/sdc.
ρy: Cuantía de acero para los estribos rectangulares extendiéndose a lo largo
de la dirección Y-Y; ρy=Asy/sbc.
Para el caso de centros circulares:

19
Para centros rectangulares:
Después que f’LX y f’LY son conocidos, f’cc es determinada usando criterios de falla
multiaxial en términos del esfuerzo de confinamiento que fue publicado en el
artículo de la referencia, Mander et al. (1984).
20
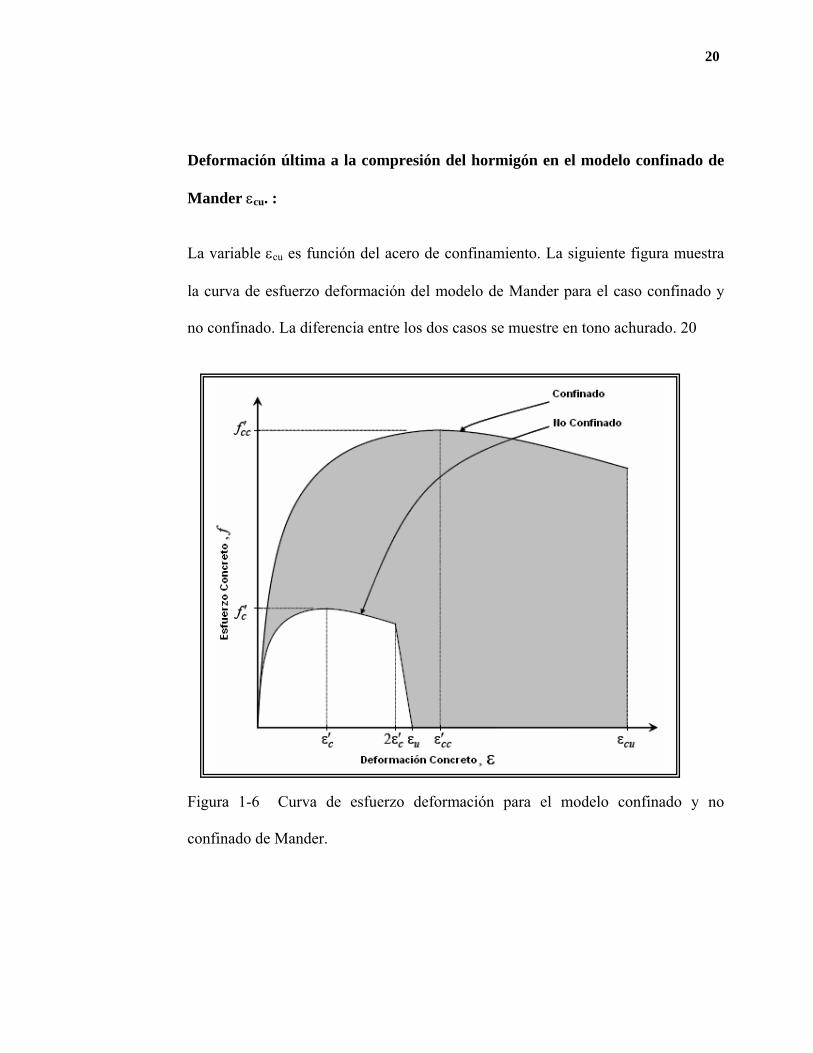
Deformación última a la compresión del hormigón en el modelo confinado de
Mander εcu. :
La variable εcu es función del acero de confinamiento. La siguiente figura muestra
la curva de esfuerzo deformación del modelo de Mander para el caso confinado y
no confinado. La diferencia entre los dos casos se muestre en tono achurado. 20
Figura 1-6 Curva de esfuerzo deformación para el modelo confinado y no
confinado de Mander.
21
La región achurada de color gris mostrada en la figura 6 representa la capacidad
adicional que provee el confinamiento del acero en cuanto a la energía de
deformación acumulada.
Suponga que A1 es el área achurada entre el modelo de Mander confinado y no
confinado y A2 es el área bajo la curva de esfuerzo deformación del acero
confinado. Adicionalmente suponga que ρs es la razón volumétrica entre el acero de
confinamiento y el centro de hormigón. Entonces, igualando energías bajo las
curvas de esfuerzo deformación del concreto y del acero de confinamiento se
obtiene:
A1 = ρsa2
SAP2000 determina el valor apropiado de deformación última del concreto, εcu, por
ajuste y error, igualando las energías como se explicó anteriormente. Cuando la
relación A1=ρsA2 es satisfecha, el valor correcto de ε’cu ha sido encontrado.
La resistencia de fluencia a tracción en las curvas de esfuerzo deformación para el
modelo de Mander Confinado es tomado como 7.5(f’c)^0.5 psi.
1.2.2 Parámetros no lineales usados en SAP2000.
El software comercial SAP2000, fue desarrollado por Computers and Structures
Inc. Este programa tiene una interfaz muy amigable y dispone de una gran variedad
de elementos lineales y no lineales, que permiten modelar una gran variedad de

22
estructuras. Existen diferentes formas de evaluar el comportamiento inelástico en
SAP 2000, entre ellas se puede destacar el uso de elementos Hinges y de elementos
Links.
Elementos Hinges: Las propiedades de rótula plástica son ampliamente usadas
para el caso de hormigón armado, tal como lo recomienda el ATC-40, en el mismo
documento se hacen diferenciaciones entre vigas y columnas con respecto a las
deformaciones máximas (Rotación). Es posible en SAP2000 introducir rotulas
plásticas en cualquier lugar a lo largo de la longitud libre de cualquier elemento
tipo frame u objeto tendón. Cada rótula representa el comportamiento concentrado
de postfluencia en uno o más grados de libertad. Las rótulas solo afectan al
comportamiento de la estructura en análisis estáticos no lineales o en análisis de
historia de respuesta de integración directa.
Las rótulas solo pueden ser introducidas en elementos frame y puede ser asignada
al mismo en cualquier ubicación. En SAP 2000 están disponibles rótulas plásticas
que definen el comportamiento de momento, torsión, fuerza axial y corte. Existe
también la posibilidad de rótulas acopladas de P-M2-M3 que fluyen de acuerdo a
las reglas de interacción entre la fuerza axial y la flexión biaxial. Se puede colocar
más de una rótula en la misma posición, por ejemplo, se puede asignar rotulas M3
(Momento) y V2 (Corte) al final de cada elemento frame. SAP2000 sigue las
características de las rótulas de acuerdo al FEMA-356 (FEMA, 2000).
23
La pérdida de resistencia es permitida en las propiedades de las rótulas. Pero deben
ser usadas cuidadosamente. Una perdida repentina de resistencia es irrealistica y
puede llegar hacer bastante difícil de analizar. SAP 2000 recomienda considerar la
pérdida de resistencia cuando es necesario.
Para cada grado de libertad de fuerza (Axial o corte), se puede especificar un
comportamiento plástico de fuerza desplazamiento. Para cada grado de libertad de
momento (Flexión o torsión) se puede especificar un comportamiento plástico de
momento rotación. Cada propiedad de la rótula deberá tener especificadas unas
propiedades plásticas para cada uno de los seis grados de libertada. La carga axial y
los dos momentos pueden estar acoplados a través de una superficie de interacción.
Los Grados de libertad que no se especifican permanecen elásticos.
Cada rotula plástica puede ser modelada como un punto discreto de rótula. Todas
las deformaciones plásticas, ya sean de desplazamiento o rotación, ocurrirán dentro
de este punto de rótula. Esto significa que se debe asumir la longitud para cada
rótula justo cuando la deformación plástica o la curvatura plástica ocurren. Algunas
recomendaciones están dadas en el FEMA-356. Normalmente es una fracción de la
longitud del elemento, y muy frecuentemente es del orden de la altura de la sección,
particularmente para rótulas de momento-rotación.
Se puede aproximar la plasticidad que está distribuida a lo largo de la longitud del
elemento insertando más rótulas. Ciertamente, adicionar mayor cantidad de rótulas

24
tendrá un mayor costo computacional, sin embargo no será muy significante si no
están efectivamente en fluencia.
Para cada grado de libertad, se puede definir una curva de fuerza-desplazamiento
(Momento-Rotación) que dan el valor de fluencia y la deformación siguiente a la
fluencia. Esto se puede observar en la figura 13.
Figura 1-7 Curva A-B-C-D-E-F de fuerza desplazamiento la misma curva es usada
para el caso de momento rotación
La forma de esta curva mostrada es usada para el caso en el que se implementen
hinges dentro del modelo. Se deben tener en cuenta los siguientes puntos:
• El Punto A siempre está en el origen.
• El punto B representa la fluencia.
25
• El punto C representa la capacidad última en el análisis de Pushover.
Sin embargo es necesario especificar una pendiente positiva desde C
hasta D, para cualquier otro propósito.
• El punto D representa la resistencia residual para el análisis de
pushover. Sin embargo es necesario especificar una pendiente positiva
desde D hasta E, para cualquier otro propósito.
• El punto E representa la falla total.
Adicionalmente se puede especificar medidas adicionales de deformación en los
puntos IO (Inmmediate Occupancy), LS (Life safety), y CP (Collapse prevention).
Estas son informaciones adicionales que son reportadas en los análisis de resultados
y usadas para el diseño basado en el desempeño. No tienen ningún efecto en el
comportamiento de la estructura.
Elementos Links: Los links son usados para unir dos nudos. Estos links pueden
tener comportamiento lineal, no lineal y dependiente de frecuencias, todo esto de
acuerdo a los tipos de propiedades asignadas a los elementos y a los tipos de
análisis que serán implementados.
Cada elemento Link está compuesto por 6 diferentes “Springs”, uno para cada uno
de los 6 grados de libertad (Axial, Corte, Torsión, y flexión pura).
26
Hay dos categorías que definen los links, lineales/no lineales y dependientes de
frecuencia. Las propiedades lineales/ no lineales deben ser asignadas a cada link.
En cambio para el caso en dependencia de frecuencias caso es opcional.
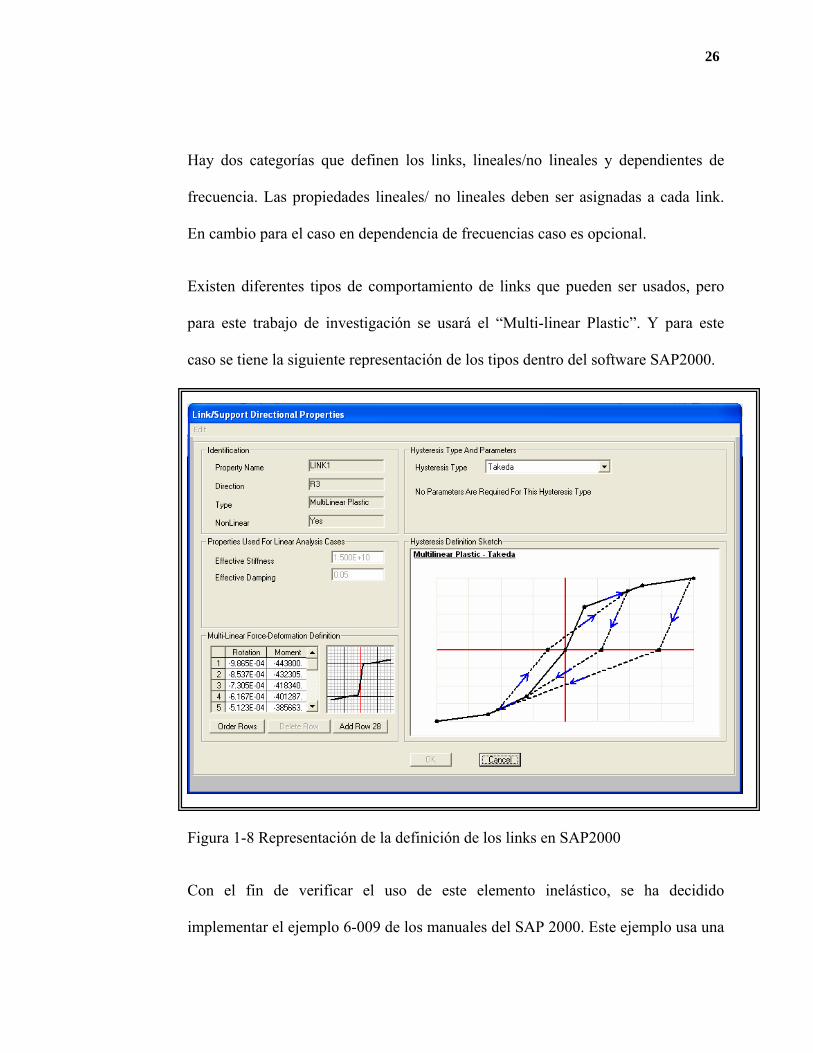
Existen diferentes tipos de comportamiento de links que pueden ser usados, pero
para este trabajo de investigación se usará el “Multi-linear Plastic”. Y para este
caso se tiene la siguiente representación de los tipos dentro del software SAP2000.
Figura 1-8 Representación de la definición de los links en SAP2000
Con el fin de verificar el uso de este elemento inelástico, se ha decidido
implementar el ejemplo 6-009 de los manuales del SAP 2000. Este ejemplo usa una
27
estructura de un solo grado de libertad para corroborar el comportamiento de los
elementos “plastic kinematic link”. Se ha definido características de fuerza
deformación multilineales diferentes para el comportamiento a compresión y a
tensión. Así mismo se ha usado un análisis no lineal estático para empujar el
elemento link a un desplazamiento positivo de 12 pulgadas. Posteriormente, un
segundo caso de carga no lineal se ha considerado al final de las condiciones del
caso de primera carga y es usada para generar un desplazamiento negativo de 12
pulgadas. Los resultados de fuerza del link a varias deformaciones son comparados
con las características definidas de fuerza deformación.
El modelo de SAP2000 consiste en un solo nudo, etiquetado como 1 y un elemento
Link. El modelo esta creado en un plano XZ. Solamente el grado de libertad Uz fue
activado para el análisis. El Link del tipo “Plastic Kinematic” es modelado como un
único nudo en el nudo 1. Esto significa que un lado del link está conectado al suelo
y el otro extremo está conectado al nudo 1. El link es orientado de tal forma que su
eje positivo local 1 concuerda con el eje paralelo positivo Z. Esta es la orientación
por defecto del nudo de un elemento Link individual. Solamente el grado de
libertad U1 es definido para este elemento.
Para este ejemplo solamente las propiedades no lineales del link fueron relevantes y
el único caso de carga fue el no lineal. Las características de fuerza deformación
están definidas en la siguiente figura:
28
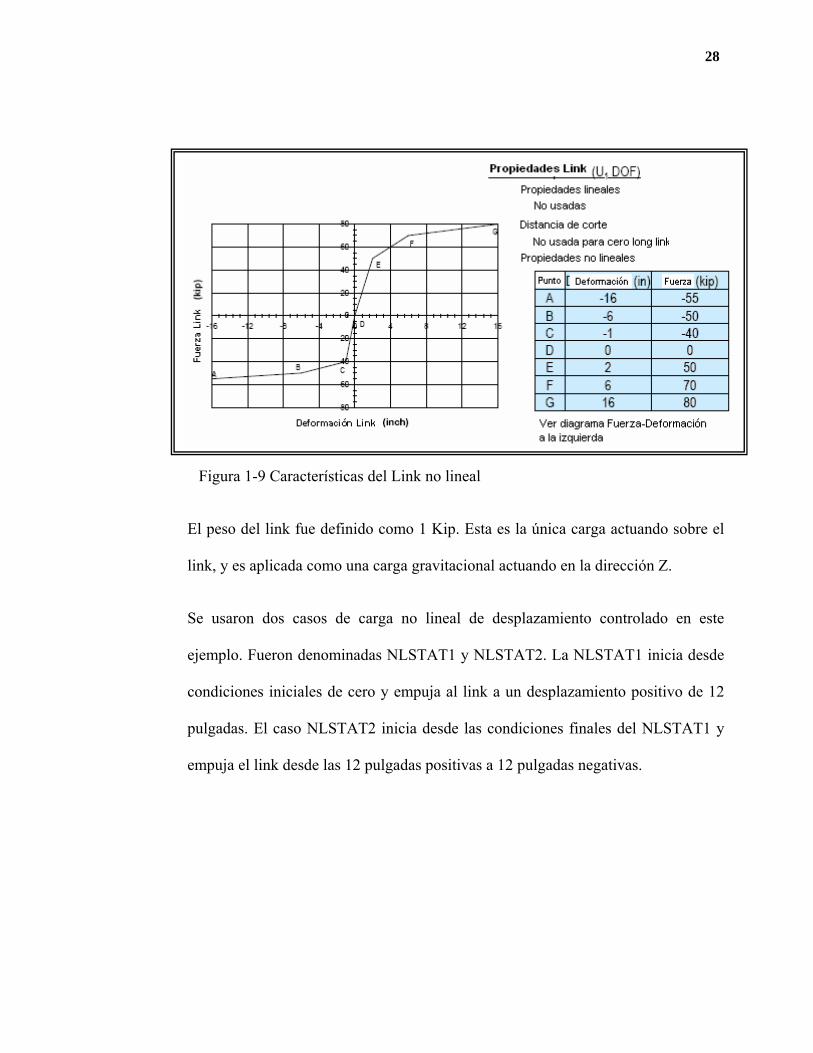
Figura 1-9 Características del Link no lineal
El peso del link fue definido como 1 Kip. Esta es la única carga actuando sobre el
link, y es aplicada como una carga gravitacional actuando en la dirección Z.
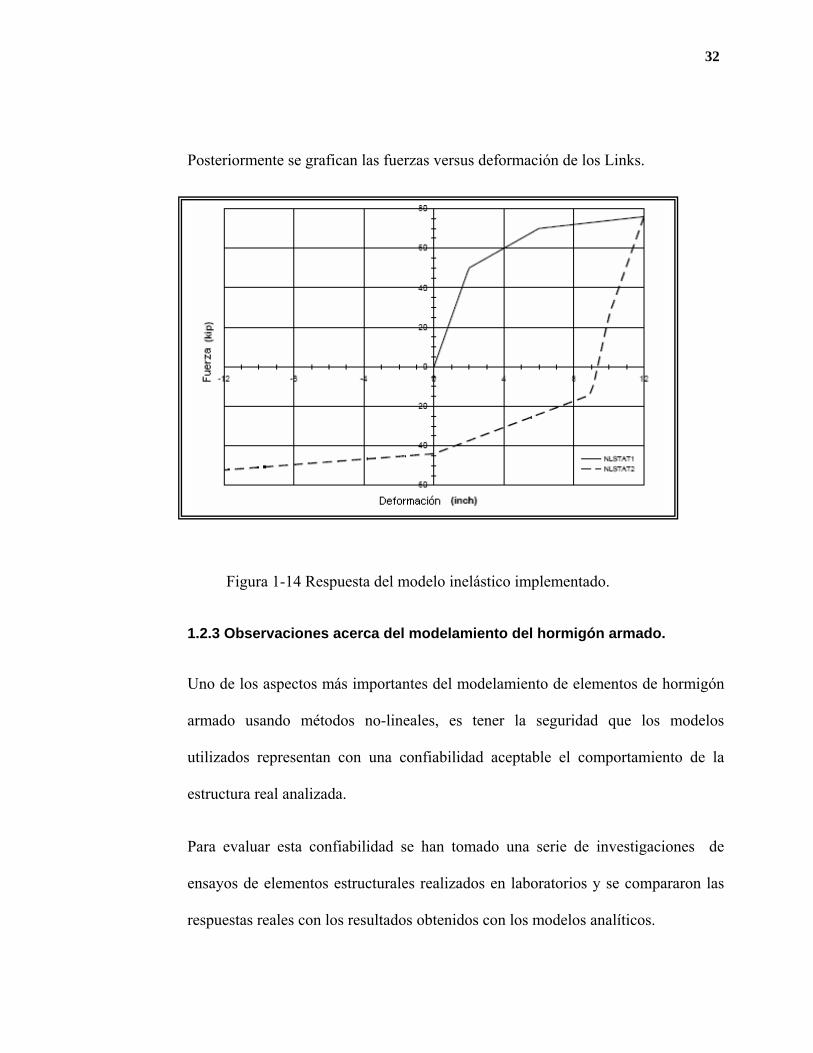
Se usaron dos casos de carga no lineal de desplazamiento controlado en este
ejemplo. Fueron denominadas NLSTAT1 y NLSTAT2. La NLSTAT1 inicia desde
condiciones iniciales de cero y empuja al link a un desplazamiento positivo de 12
pulgadas. El caso NLSTAT2 inicia desde las condiciones finales del NLSTAT1 y
empuja el link desde las 12 pulgadas positivas a 12 pulgadas negativas.
29
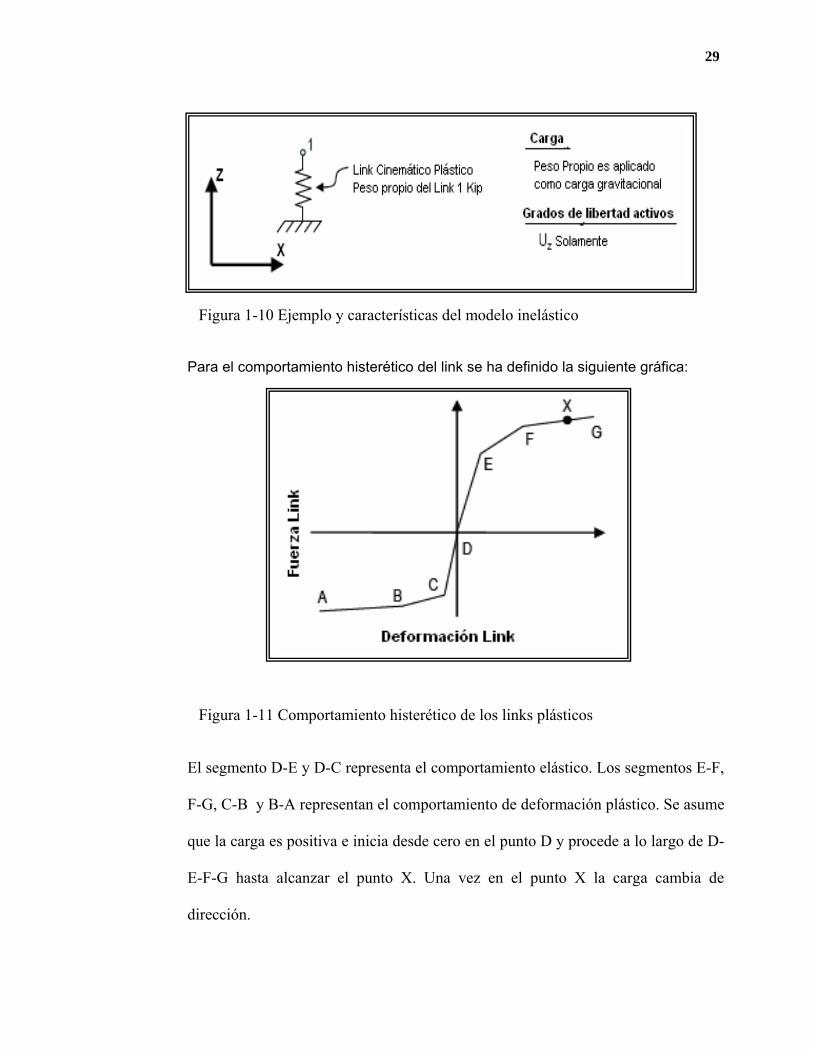
Figura 1-10 Ejemplo y características del modelo inelástico
Para el comportamiento histerético del link se ha definido la siguiente gráfica:
Figura 1-11 Comportamiento histerético de los links plásticos
El segmento D-E y D-C representa el comportamiento elástico. Los segmentos E-F,
F-G, C-B y B-A representan el comportamiento de deformación plástico. Se asume
que la carga es positiva e inicia desde cero en el punto D y procede a lo largo de D-
E-F-G hasta alcanzar el punto X. Una vez en el punto X la carga cambia de
dirección.
30
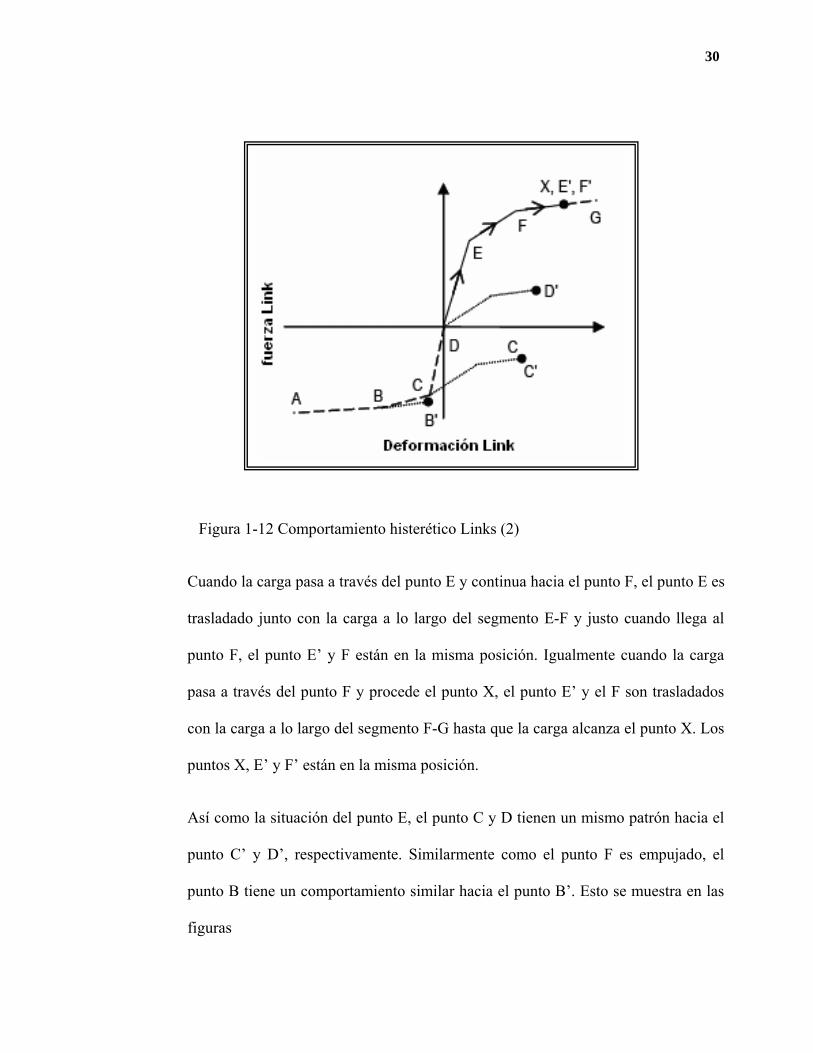
Figura 1-12 Comportamiento histerético Links (2)
Cuando la carga pasa a través del punto E y continua hacia el punto F, el punto E es
trasladado junto con la carga a lo largo del segmento E-F y justo cuando llega al
punto F, el punto E’ y F están en la misma posición. Igualmente cuando la carga
pasa a través del punto F y procede el punto X, el punto E’ y el F son trasladados
con la carga a lo largo del segmento F-G hasta que la carga alcanza el punto X. Los
puntos X, E’ y F’ están en la misma posición.
Así como la situación del punto E, el punto C y D tienen un mismo patrón hacia el
punto C’ y D’, respectivamente. Similarmente como el punto F es empujado, el
punto B tiene un comportamiento similar hacia el punto B’. Esto se muestra en las
figuras
31
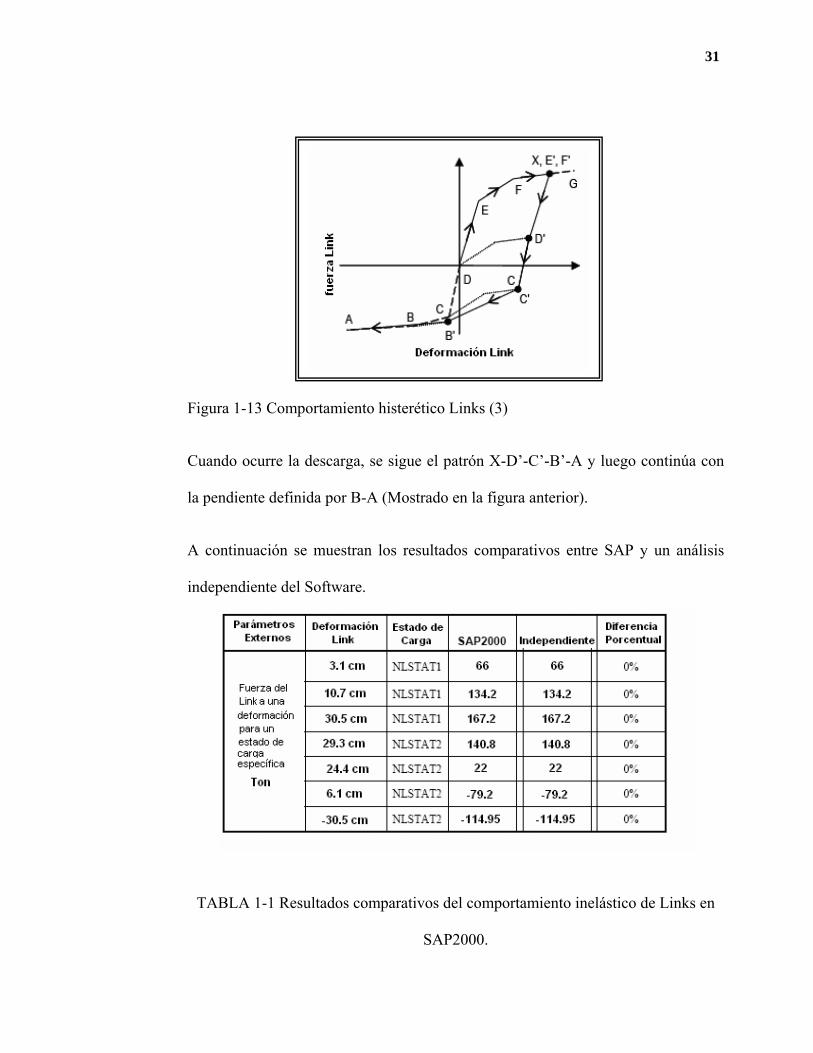
Figura 1-13 Comportamiento histerético Links (3)
Cuando ocurre la descarga, se sigue el patrón X-D’-C’-B’-A y luego continúa con
la pendiente definida por B-A (Mostrado en la figura anterior).
A continuación se muestran los resultados comparativos entre SAP y un análisis
independiente del Software.
TABLA 1-1 Resultados comparativos del comportamiento inelástico de Links en
SAP2000.
32
Posteriormente se grafican las fuerzas versus deformación de los Links.
Figura 1-14 Respuesta del modelo inelástico implementado.
1.2.3 Observaciones acerca del modelamiento del hormigón armado.
Uno de los aspectos más importantes del modelamiento de elementos de hormigón
armado usando métodos no-lineales, es tener la seguridad que los modelos
utilizados representan con una confiabilidad aceptable el comportamiento de la
estructura real analizada.
Para evaluar esta confiabilidad se han tomado una serie de investigaciones de
ensayos de elementos estructurales realizados en laboratorios y se compararon las
respuestas reales con los resultados obtenidos con los modelos analíticos.
33
Los estudios que se han realizado han demostrado que la rigidez que presentan los
elementos de hormigón una vez ocurrido el agrietamiento se reduce enormemente.
Las disposiciones del FEMA 273 y ATC 40 (Ver referencias) recomiendan usar
para las columnas Ie=0.7Ib y para las vigas Ie=0.5Ib, Siendo Ib e Ie el momento de
inercia de la sección bruta y efectiva, respectivamente, otros estudios también
tienen muchos comentarios al respecto (Ver referencia Hidalgo-Clough página 158,
159). Por otro lado el ACI 318 recomienda usar para las vigas Ie=0.35Ib, valor que
es finalmente utilizado en las modelaciones realizadas en este trabajo debido a que
evidenció una mejor representación de la respuesta real de los elementos.
La unión viga-columna no se modeló como 100% rígida, ya que las investigaciones
realizadas en 1987 (Hidalgo, Jordán y Luders) muestran que el nudo es solo
parcialmente rígido, y que la longitud del segmento rígido correspondiente a él,
depende a su vez de la geometría del nudo. La idea de esta práctica es demostrar
que la no consideración efectivamente no tenía un efecto sobre lo que se hace en la
práctica.
Otro de los parámetros importantes a considerar en la modelación es la razón p
entre la rigidez elástica y la rigidez de postfluencia.
Fillippou e Issa (1988) sostiene que usar la razón entre la rigidez elástica y de
postfluencia de la relación momento-curvatura teórica en la relación momento-
rotación subestima la rigidez de postfluencia de elementos flexurales. La relación
momento-rotación es usada en los modelos con plasticidad concentrada (Links).
34
Por otro lado y dado que SAP 2000 usa diferentes tipos de Sketch histeréticos se
hace necesario describir brevemente los efectos de los diferentes comportamientos
histeréticos.
Comportamiento histerético: Durante años se han investigado el comportamiento
de estructuras sometidas a cargas cíclicas y se ha concluido que la degradación de
la resistencia y rigidez bajo este efecto es un fenómeno real y muy determinante en
la posibilidad de la inestabilidad dinámica lateral.
El FEMA P440A de Junio de 2009, es un muy buen ejemplo de un estudio
exhaustivo desarrollado a partir de 160 sistemas de único grado de libertad y más
de 600 sistemas de múltiples grados de libertad. Cada sistema fue sujeto a un
análisis dinámico incremental con 56 movimientos del suelo escalados a diferentes
niveles de intensidad. Esta investigación arrojó ramificaciones prácticas que se
pueden resumir a continuación:
• El comportamiento de estructuras reales puede incluir pérdida de capacidad a
carga vertical por desplazamientos que son significativamente menores a los
asociados con el colapso.
• Históricamente el término “Backbone curve” se refiere a muchas cosas diferentes.
Por esta razón, dos nuevos términos han sido introducidos para distinguir entre los
diferentes aspectos del comportamiento histerético. Estos son “Force-displacemente
capacity boundary, y cyclic envelope”.
35
• Los parámetros no lineales deben estar basados en condiciones límite de
capacidad de fuerza desplazamiento más que en la envolvente cíclica. Determinar
la capacidad última de fuerza-desplazamiento a partir de resultados de ensayos
usando un solo protocolo de ciclo de carga puede traer resultados muy
conservativos para la determinación del máximo desplazamiento.
Por otro lado el FEMA 440 “Improvement of Nonlinear Static Seismic Analysis
Procedures” (FEMA, 2005), fue comisionado para evaluar y desarrollar mejoras en
los procedimientos de análisis estáticos no lineales predominantes en la práctica. En
esa investigación se ha encontrado una serie de desviaciones entre los análisis
estáticos no lineales y los análisis no lineales de respuesta de historia de respuesta y
se atribuyen a los siguientes factores: (1) imprecisión en la aproximación de iguales
desplazamientos para rangos de periodos cortos, (2) efectos P-delta de
inestabilidad, (3) suposiciones del vector de carga estático, (4) degradación de
rigidez y resistencia, (5) efectos de múltiples grados de libertad, y (6) efectos de
interacción suelo-estructura.
El FEMA 440 identifica dos tipos de degradación inelástica para osciladores de un
solo grado de libertad.
36
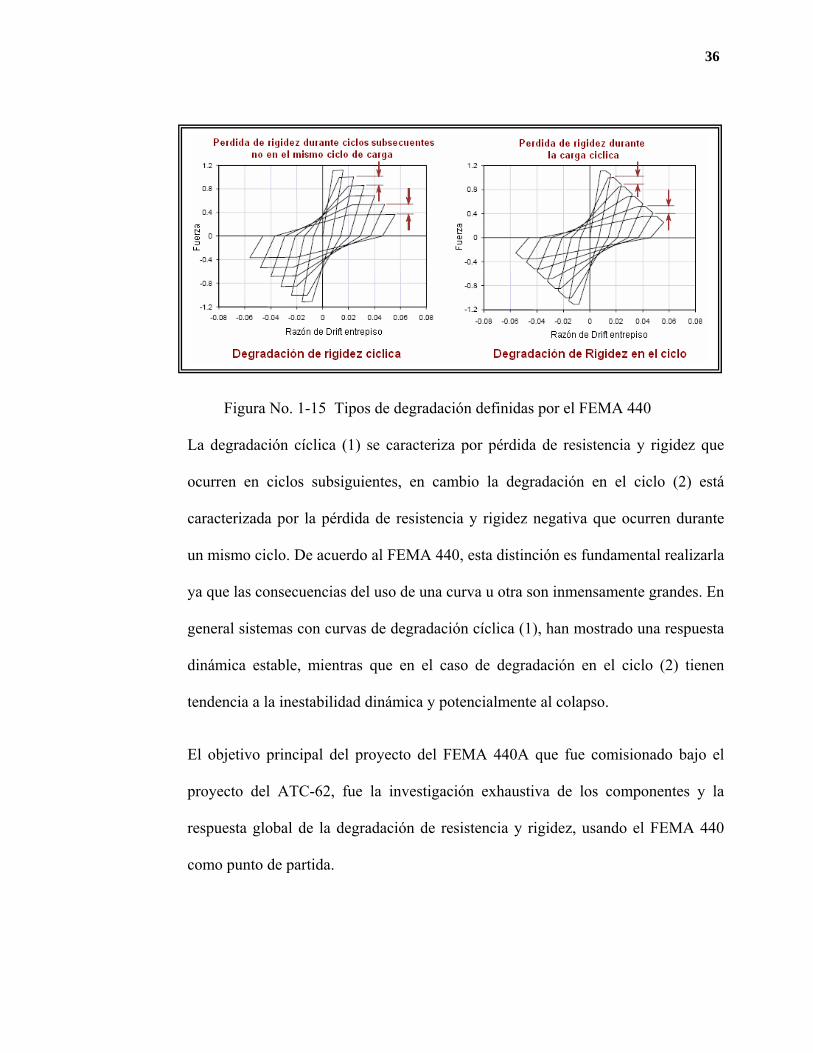
Figura No. 1-15 Tipos de degradación definidas por el FEMA 440
La degradación cíclica (1) se caracteriza por pérdida de resistencia y rigidez que
ocurren en ciclos subsiguientes, en cambio la degradación en el ciclo (2) está
caracterizada por la pérdida de resistencia y rigidez negativa que ocurren durante
un mismo ciclo. De acuerdo al FEMA 440, esta distinción es fundamental realizarla
ya que las consecuencias del uso de una curva u otra son inmensamente grandes. En
general sistemas con curvas de degradación cíclica (1), han mostrado una respuesta
dinámica estable, mientras que en el caso de degradación en el ciclo (2) tienen
tendencia a la inestabilidad dinámica y potencialmente al colapso.
El objetivo principal del proyecto del FEMA 440A que fue comisionado bajo el
proyecto del ATC-62, fue la investigación exhaustiva de los componentes y la
respuesta global de la degradación de resistencia y rigidez, usando el FEMA 440
como punto de partida.
37
Muchos modelos han sido propuestos a través de los años con el objetivo de
caracterizar el comportamiento no lineal de los componentes estructurales y estimar
de buena forma la respuesta de los sistemas estructurales. Los modelos histeréticos
van desde el simple comportamiento elasto-plastico hasta las complejas
degradaciones de rigidez y resistencia curvilíneas. A continuación se resumen las
más importantes
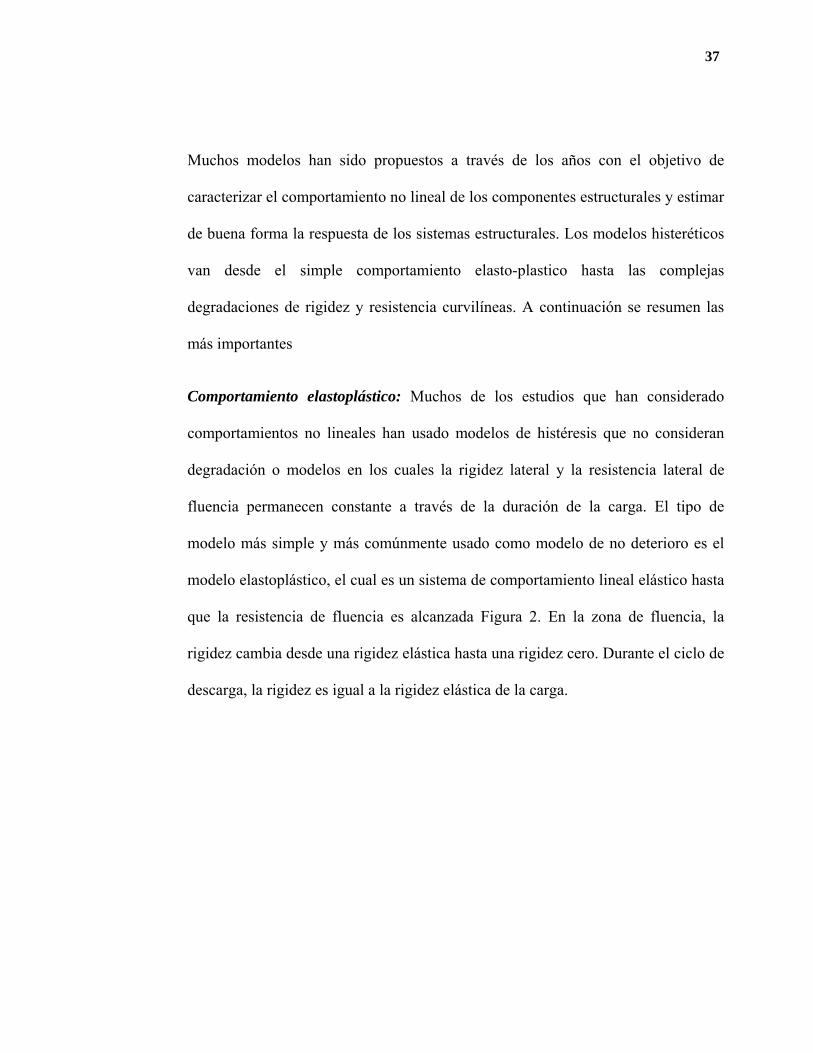
Comportamiento elastoplástico: Muchos de los estudios que han considerado
comportamientos no lineales han usado modelos de histéresis que no consideran
degradación o modelos en los cuales la rigidez lateral y la resistencia lateral de
fluencia permanecen constante a través de la duración de la carga. El tipo de
modelo más simple y más comúnmente usado como modelo de no deterioro es el
modelo elastoplástico, el cual es un sistema de comportamiento lineal elástico hasta
que la resistencia de fluencia es alcanzada Figura 2. En la zona de fluencia, la
rigidez cambia desde una rigidez elástica hasta una rigidez cero. Durante el ciclo de
descarga, la rigidez es igual a la rigidez elástica de la carga.

38
Figura No. 1-16 Modelo elastoplástico de no degradación
Algunos ejemplos del uso de este modelo se incluye en los estudios de Berg and Da
Deppo (1960), Penzien (1960a, 1960b), y Veletsos y Newmark (1960). El último
estudio fue el primero en notar que el desplazamiento lateral máximo de sistemas
de moderados, largos periodos y de un solo grado de libertad (SDOF) con
comportamiento elastoplástico tenía, en promedio, cerca del mismo que los
sistemas lineales elásticos. Sus observaciones son conocidas como “Aproximación
de iguales desplazamiento”. Esta aproximación ampliamente usada implica que el
máximo desplazamiento de sistemas con periodos moderados y largos y de no
degradación son proporcionales a la intensidad del movimiento del suelo, lo que
significa que si la intensidad del movimiento del suelo es duplicada, el
desplazamiento máximo será en promedio, aproximadamente el doble de grande.
Veletsos y Newmark también observaron que el desplazamiento máximo para
periodos cortos de sistemas de un solo grado de libertad (SDOF) con
39
comportamientos elastoplástico es, en promedio, mayores que aquellos sistemas
lineales elásticos, y su incremento en el desplazamiento máximo lateral son más
grandes que el incremento de intensidad del movimiento del suelo. De esta manera
la aproximación de igual desplazamiento se observa que es menor que la aplicada a
estructuras de periodos cortos.
Muchos estudios posteriores han corroborado esta temprana observación (Miranda,
1993, 2000; Ruiz-Garcia and Miranda, 2003; Chopra and Chintanapakdee, 2004).
Estas observaciones formaron las bases del coeficiente de modificación de
desplazamiento C1, que tiene en cuenta el efecto inelástico en el método de los
coeficientes para la estimación del desplazamiento máximo.
Comportamiento de endurecimiento de resistencia: Otro modelo histerético
comúnmente usado de no degradación es el modelo de endurecimiento por
resistencia, el cual es similar al modelo elastoplástico, excepto que la rigidez de
post-fluencia es mayor que cero (Ver figura 3), las aplicaciones iníciales de este
modelo incluyen aquellas realizadas por Caughey (1960a, 1960b) y Iwan (1961).
La rigidez positiva de post-fluencia es también referida al endurecimiento de
esfuerzo porque muchos materiales exhiben ganancias en rigidez (Endurecimiento)
cuando están sujetos a grandes niveles de esfuerzos después de pasar por la
fluencia. El endurecimiento de los componentes, conexiones, y sistemas después de
la fluencia inicial es causada por eventuales desplazamientos de toda la sección del
elemento, o fluencia secuencial de los elementos que quedan en el sistema.

40
Figura No. 1-17 Modelo de endurecimiento de resistencia sin degradación
Aunque muchos estudios habían considerado comportamientos elasto-plásticos y de
endurecimiento por resistencia, no fue hasta hace poco, que estudios estadísticos a
fondo, encontraron cantidades diferentes con respecto a los desplazamientos
máximos y fueron usados un alto rango de periodos de vibración, un completo
rango de rigideces post-elásticas, y un largo número de movimientos sísmicos.
Muchos estudios recientes han entregado información cuantitativa de los efectos
promedios de la rigidez positiva post-fluencia en la respuesta y la variabilidad en la
respuesta para diferentes registros. Todos están de acuerdo en que para estructuras
con periodos moderados y largos, la presencia de rigidez post-elástica positiva
entrega reducción relativamente pequeñas (menos del 5%) en el desplazamiento
máximo (Ruiz- Garcia y Miranda, 2003; Chopra y Chintanapakdee, 2004).
Comportamiento de degradación de rigidez: Algunos componentes estructurales y
sistemas pueden exhibir algunos niveles de degradación de rigidez cuando están

41
sujetos a ciclos de descarga. Esto es especialmente cierto para componentes de
concreto reforzado sujetos a varios ciclos de carga y descarga. La degradación del
concreto reforzado es usualmente el resultado de agrietamientos, perdida de
trabadura o de interacción con alto esfuerzo de corte o con altos esfuerzos axiales.
El nivel de degradación de rigidez depende de las características de la estructura.
(Propiedades del material, geometría, niveles de detallamiento de ductilidad, tipo de
conexiones), así como la historia de carga (intensidad en cada ciclo, número de
ciclos, secuencia de carga).
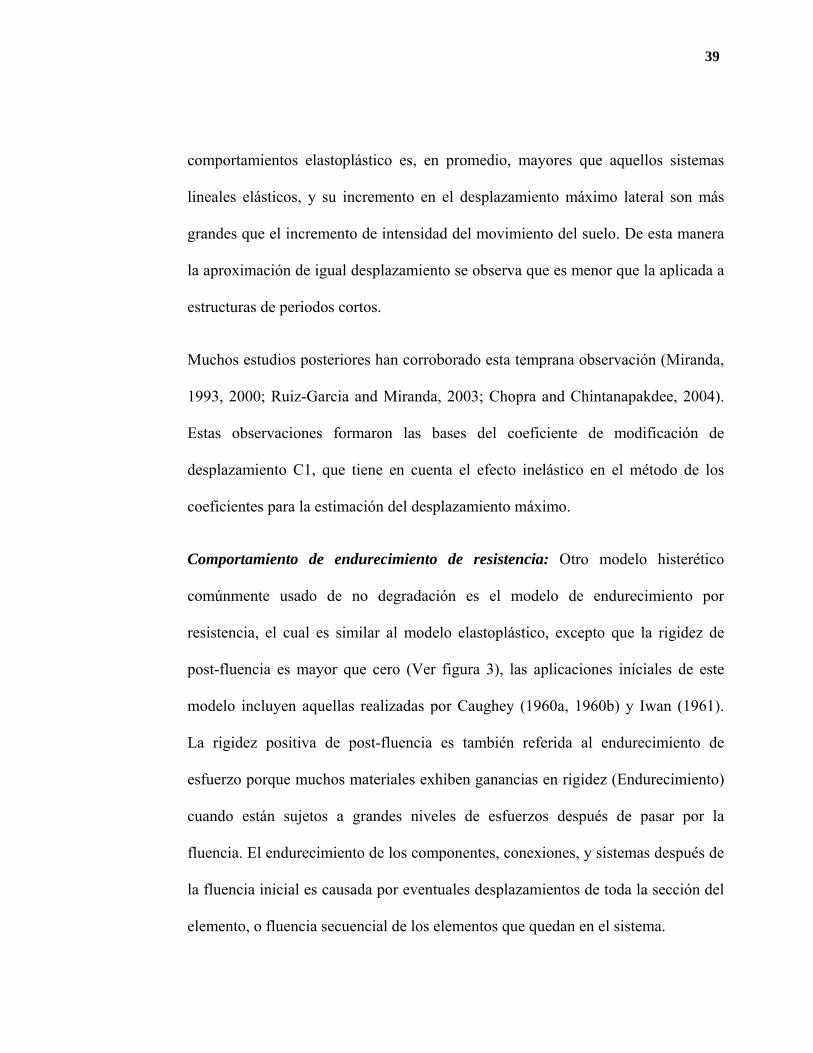
La siguiente figura muestra 3 modelos diferentes de degradación de rigidez, en el
primer modelo la rigidez de carga y descarga es la misma, y la degradación de
rigidez se da como incremento en el desplazamiento. En el segundo modelo la
rigidez de carga decrece como función del desplazamiento máximo, pero la rigidez
de descarga se mantiene constante e igual a la rigidez inicial. En el último modelo,
las dos rigideces de carga y descarga se degradan como función del desplazamiento
máximo.
Para medir los efectos de degradación de rigidez, muchos estudios han comparado
la respuesta máxima de la degradación de rigidez con aquellos sistemas con
modelos elasto-plásticos y bilineales de endurecimiento de rigidez. (Clough 1966;
Clough and Johnston 1966; Chopra and Kan, 1973; Powel and Row, 1976; Mahin
and Bertero, 1976; Riddell and Newmark, 1979; Newmark and Riddell, 1980; Iwan
1980; Otani, 1981; Nassar and Krawinkler 1991; Rahnama and Krawinkler, 1993;
42
Shi and Foutch, 1997; Foutch and Shi, 1998; Gupta and Krawinkler, 1998; Gupta
and Kunnath, 1998; Medine 2002; Medina and Krawinkler, 2004; Ruiz-Garcia and
Miranda, 2005.
Figura No. 1-18 Modelos de histéresis
Estos estudios han concluido que para estructuras de periodos cortos con modelos
de degradación de rigidez experimentan un desplazamiento máximo que es; en
promedio, mayor que los casos realizados con sistemas con modelos histeréticos
elastoplástico o bilineales de endurecimiento de rigidez. Los estudios anteriores
también han examinado los efectos de degradación de rigidez en estructuras sujetas
a registros de movimiento en roca o en suelos estables. Ruiz-García and Miranda
(2006b) examinaron los efectos de la degradación de rigidez en estructuras sujetas a
estas características, especialmente estructuras con periodos cortos y en el cual el
periodo predominante es el del suelo.
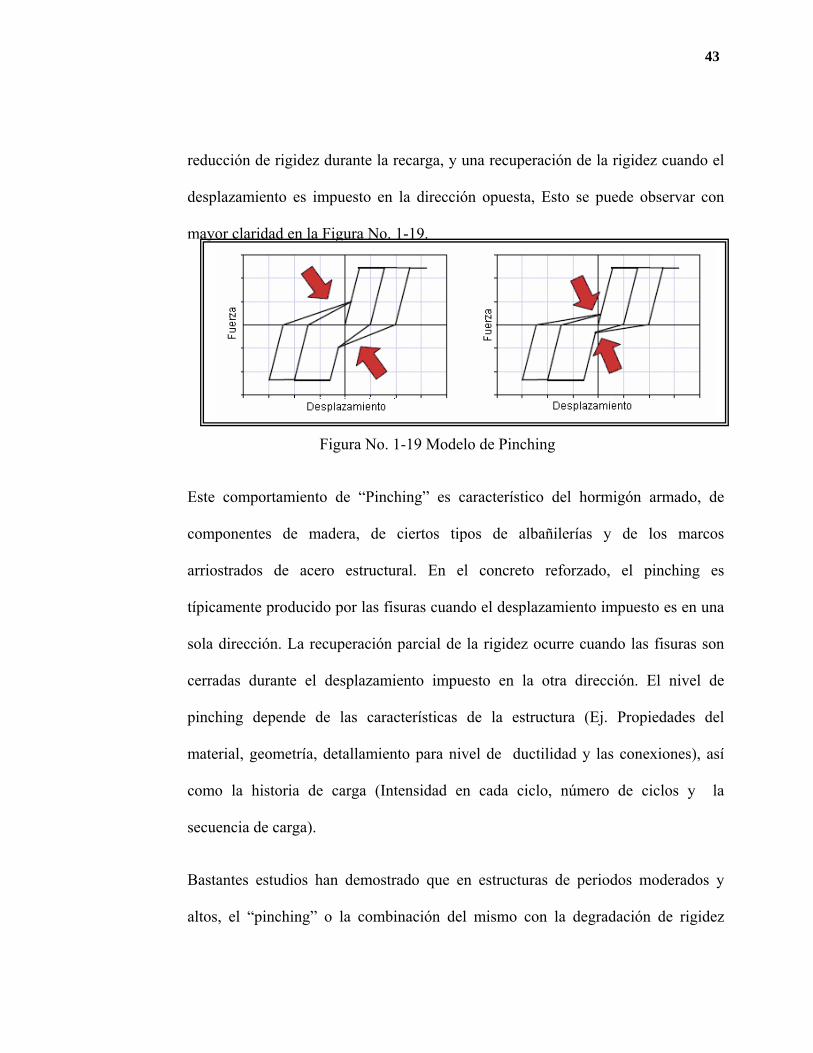
Comportamiento del Pinching: los componentes estructurales y las conexiones
presentan un fenómeno llamado pinching, cuando están sujetas a ciclos de
descarga. El comportamiento de “Pinching” es característico por una gran
43
reducción de rigidez durante la recarga, y una recuperación de la rigidez cuando el
desplazamiento es impuesto en la dirección opuesta, Esto se puede observar con
mayor claridad en la Figura No. 1-19.
Figura No. 1-19 Modelo de Pinching
Este comportamiento de “Pinching” es característico del hormigón armado, de
componentes de madera, de ciertos tipos de albañilerías y de los marcos
arriostrados de acero estructural. En el concreto reforzado, el pinching es
típicamente producido por las fisuras cuando el desplazamiento impuesto es en una
sola dirección. La recuperación parcial de la rigidez ocurre cuando las fisuras son
cerradas durante el desplazamiento impuesto en la otra dirección. El nivel de
pinching depende de las características de la estructura (Ej. Propiedades del
material, geometría, detallamiento para nivel de ductilidad y las conexiones), así
como la historia de carga (Intensidad en cada ciclo, número de ciclos y la
secuencia de carga).
Bastantes estudios han demostrado que en estructuras de periodos moderados y
altos, el “pinching” o la combinación del mismo con la degradación de rigidez
44
tienen solo un pequeño efecto en la demanda máxima de desplazamiento (Otani,
1981; Nassar and Krawinkler 1991; Rahnama and Krawinkler, 1993; Shi and
Foutch, 1997; Foutch and Shi, 1998; Gupta and Krawinkler, 1998; Gupta and
Kunnath, 1998; Medina 2002; Medina and Krawinkler, 2004; Ruiz-Garcia and
Miranda, 2005).
Estos y otros estudios han mostrado que sistemas de periodos grandes y moderados
con un 50% de reducción en la capacidad de disipación de energía histerética
debido al “pinching”, experimentan un desplazamiento máximo, que en promedio,
es similar al de estructuras con comportamientos histeréticos elastoplásticos o
bilineales de endurecimiento de rigidez. Esta observación es particularmente
interesante porque es contraria a lo ampliamente generalizado en la que estructuras
con comportamiento elastoplástico o bilineal exhiben mejores comportamientos
que estructuras con “pinching” por la presencia adicional de capacidad de
disipación histerética de energía.
Sin embargo los mismos estudios, también han mostrado que sistemas de periodos
cortos con “Pinching” experimentan desplazamiento peak que tienden a ser
mayores que esos experimentados por sistemas con comportamientos histeréticos
elastoplástico o bilineales de endurecimiento de rigidez.
Degradación de rigidez combinado con ciclos de degradación de resistencia:
Muchos estudios han evaluado esta combinación de parámetros (Gupta and
Kunnath, 1998; Song and Pincheira, 2000; Medina 2002; Medina and Krawinler,
45
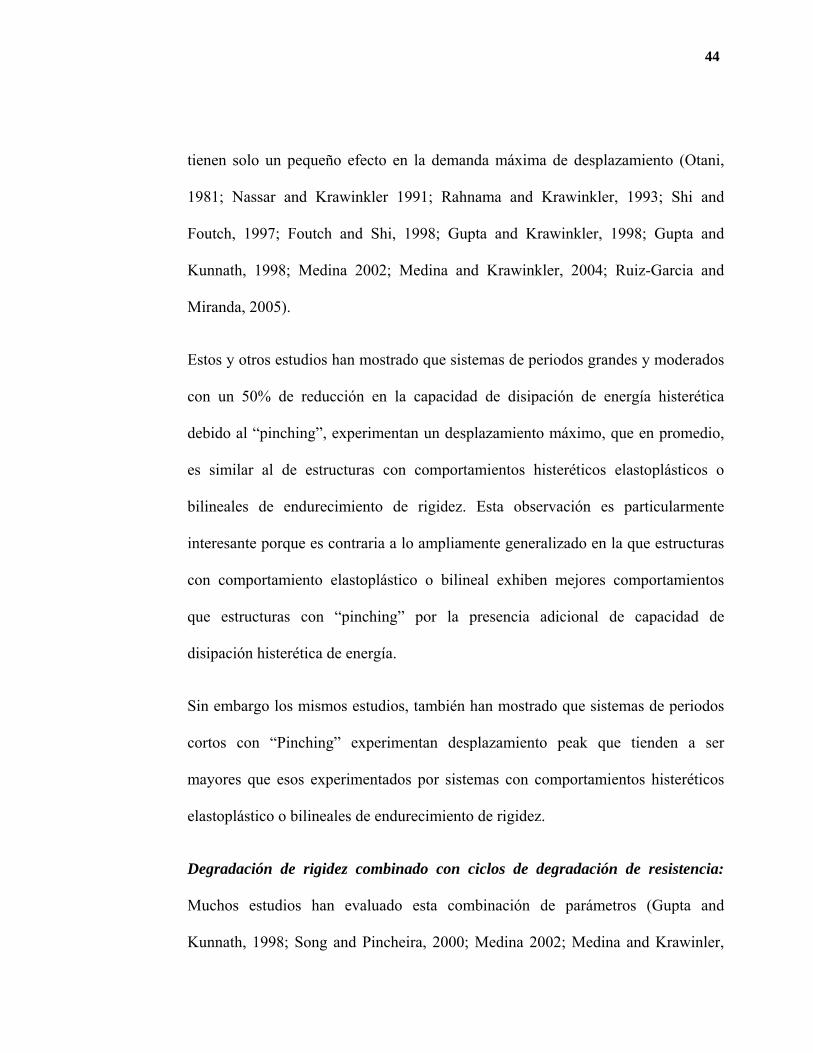
2004; Ruiz-Garcia and Miranda, 2005; Chenouda, and Ayoub, 2007). Ejemplos de
este comportamiento se muestran a continuación:
Figura No. 1-20 Modelos combinados de degradación de rigidez y degradación
cíclica de resistencia (a) degradación moderada de rigidez y degradación cíclica de
resistencia y (b) degradación severa de rigidez y degradación de resistencia cíclica.
(Ruiz-Garcia and Miranda, 2005)
La figura (a) muestra un sistema con degradación moderada de rigidez y
degradación cíclica de resistencia (MSD), y la figura (b) muestra un sistema con
degradación severa de rigidez y degradación cíclica de resistencia (SSD). En estos
sistemas, la resistencia lateral es reducida como función de la demanda máxima de
desplazamiento así como la demanda de energía histerética. Estos estudios han
demostrado, que para sistemas de periodos moderados o largos con esta
combinación de parámetros, tendrán un desplazamiento promedio, similar a los
46
sistemas evaluados con un comportamiento elastoplástico o bilineal de
endurecimiento de resistencia.
Diferencia entre degradación de resistencia cíclica y en el ciclo: El FEMA 440
identifica claramente esta distinción, ya que es muy importante porque las
conclusiones encontradas y observadas son muy diferentes. Respuestas dinámicas
con ciclos de degradación de resistencia son generalmente estables, mientras que el
modelo de degradación de resistencia en el ciclo puede llegar hacer dinámicamente
inestable.
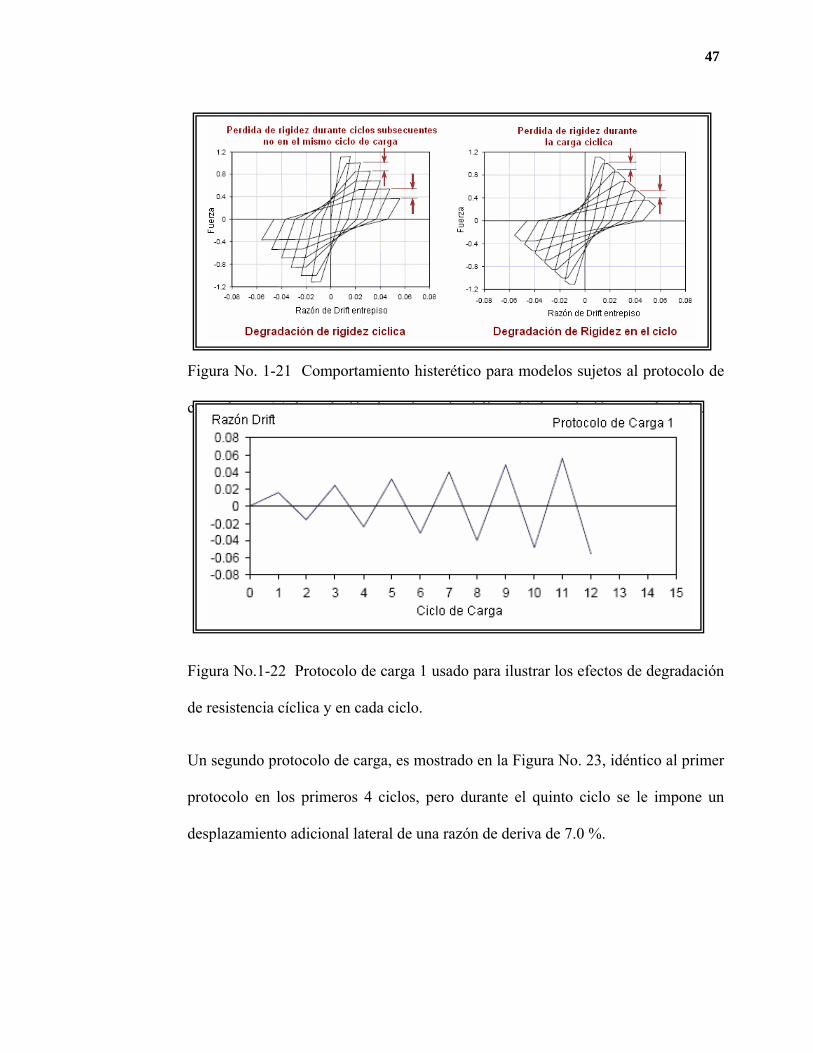
La siguiente figura compara el comportamiento histerético de dos sistemas sujetos
al protocolo de carga de la figura No. 22. Este protocolo de carga comprende seis
ciclos completos (doce mitades de ciclo) con un incremento lineal de amplitud de
deriva de 0.8% en cada ciclo. El ciclo en la figura 21 (a) tiene una degradación
cíclica y el sistema de la figura 21 (b) tiene una degradación en cada ciclo. Cuando
se somete a este protocolo de carga, ambos modelos histeréticos exhiben similares
niveles de degradación de resistencia y de rigidez, y similares comportamientos
globales. Su comportamiento bajo diferentes protocolos de carga, pueden llegar
hacer muy diferentes.
47
Figura No. 1-21 Comportamiento histerético para modelos sujetos al protocolo de
carga 1 con: (a) degradación de resistencia cíclica, (b) degradación en cada ciclo.
Figura No.1-22 Protocolo de carga 1 usado para ilustrar los efectos de degradación
de resistencia cíclica y en cada ciclo.
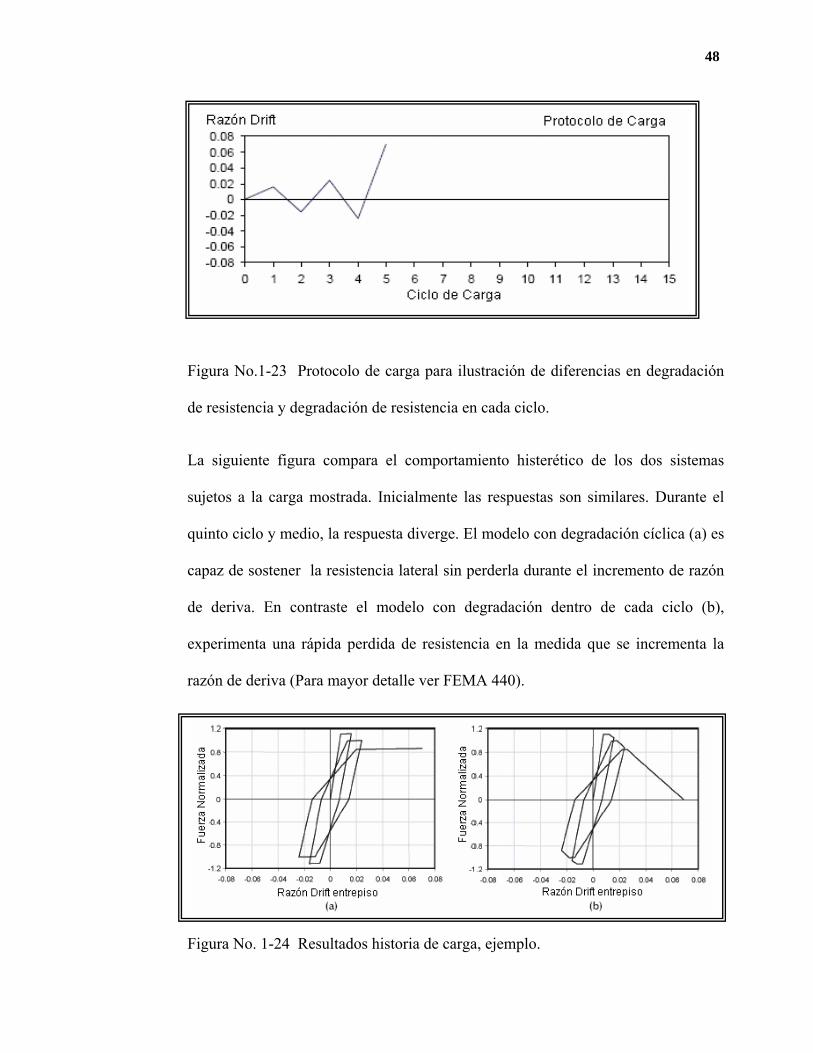
Un segundo protocolo de carga, es mostrado en la Figura No. 23, idéntico al primer
protocolo en los primeros 4 ciclos, pero durante el quinto ciclo se le impone un
desplazamiento adicional lateral de una razón de deriva de 7.0 %.
48
Figura No.1-23 Protocolo de carga para ilustración de diferencias en degradación
de resistencia y degradación de resistencia en cada ciclo.
La siguiente figura compara el comportamiento histerético de los dos sistemas
sujetos a la carga mostrada. Inicialmente las respuestas son similares. Durante el
quinto ciclo y medio, la respuesta diverge. El modelo con degradación cíclica (a) es
capaz de sostener la resistencia lateral sin perderla durante el incremento de razón
de deriva. En contraste el modelo con degradación dentro de cada ciclo (b),
experimenta una rápida perdida de resistencia en la medida que se incrementa la
razón de deriva (Para mayor detalle ver FEMA 440).
Figura No. 1-24 Resultados historia de carga, ejemplo.
49
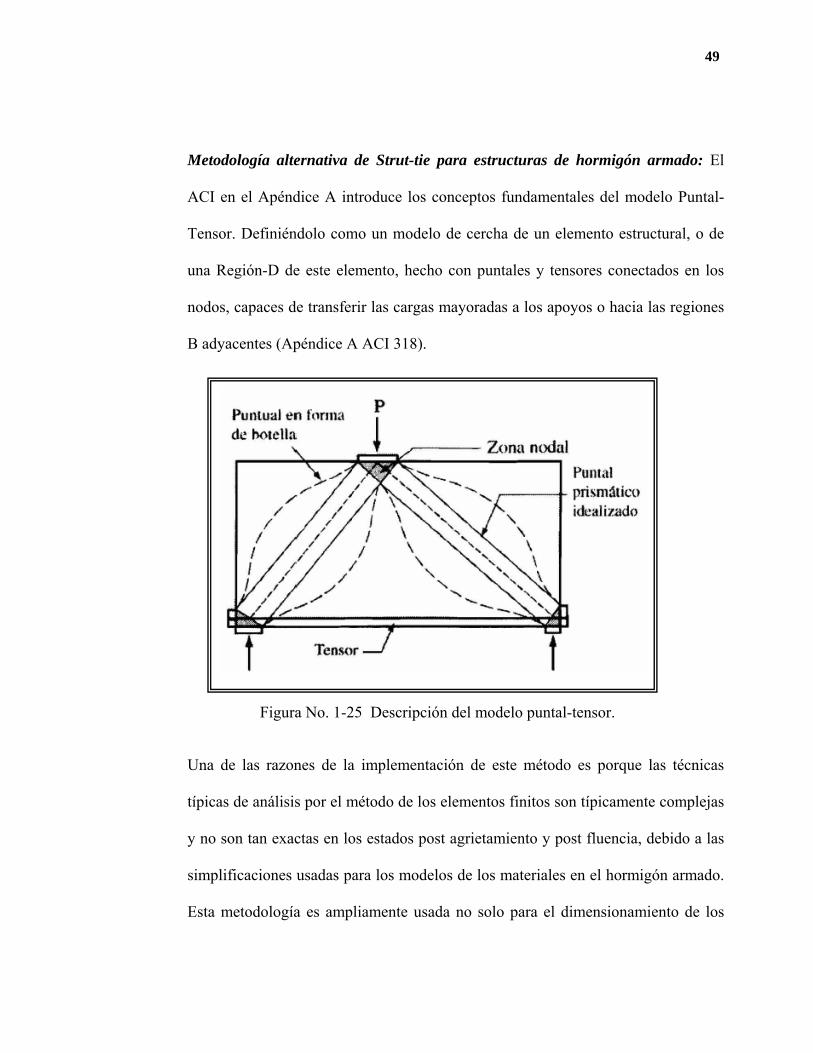
Metodología alternativa de Strut-tie para estructuras de hormigón armado: El
ACI en el Apéndice A introduce los conceptos fundamentales del modelo Puntal-
Tensor. Definiéndolo como un modelo de cercha de un elemento estructural, o de
una Región-D de este elemento, hecho con puntales y tensores conectados en los
nodos, capaces de transferir las cargas mayoradas a los apoyos o hacia las regiones
B adyacentes (Apéndice A ACI 318).
Figura No. 1-25 Descripción del modelo puntal-tensor.
Una de las razones de la implementación de este método es porque las técnicas
típicas de análisis por el método de los elementos finitos son típicamente complejas
y no son tan exactas en los estados post agrietamiento y post fluencia, debido a las
simplificaciones usadas para los modelos de los materiales en el hormigón armado.
Esta metodología es ampliamente usada no solo para el dimensionamiento de los

50
elementos, sino también para obtener la capacidad de transmitir la carga en el caso
de detalles en hormigón armado.
La metodología de Strut and Tie es simple de comprender, pero requiere suficiente
conocimiento en los patrones de cargas internas, el cual es dictaminado por el
arreglo de refuerzo, la geometría de los detalles y las condiciones de soporte y de
carga.
Algunas investigaciones (N.H.T. To, J.M. Ingham & B.J. Davidson 2003)
trabajaron en el comportamiento no lineal de tres vigas en voladizo de concreto
reforzado y tres uniones de puentes de hormigón armado a escala real analizados
usando modelos de Strut-tie cíclicos no lineales. Los modelos de Strut and Tie
(STM) son una representación discreta del campo de esfuerzos desarrollada en
estructuras de hormigón armada cuando están sujetas a la acción externa.
Para la investigación anteriormente nombrada se empleó el programa Ruaumoko
(Carr 1998), con los adecuados modelos de esfuerzo-deformación para el concreto
y el acero. Es muy importante resaltar que el objetivo de esa investigación no fue
obtener una réplica exacta del mecanismo de transferencia de esfuerzos cuando una
estructura está sujeta a la acción cíclica. El objetivo de esta investigación fue
representar solo una simple herramienta de diagnóstico para los análisis sísmicos y
el diseño de estructuras complicadas.
51
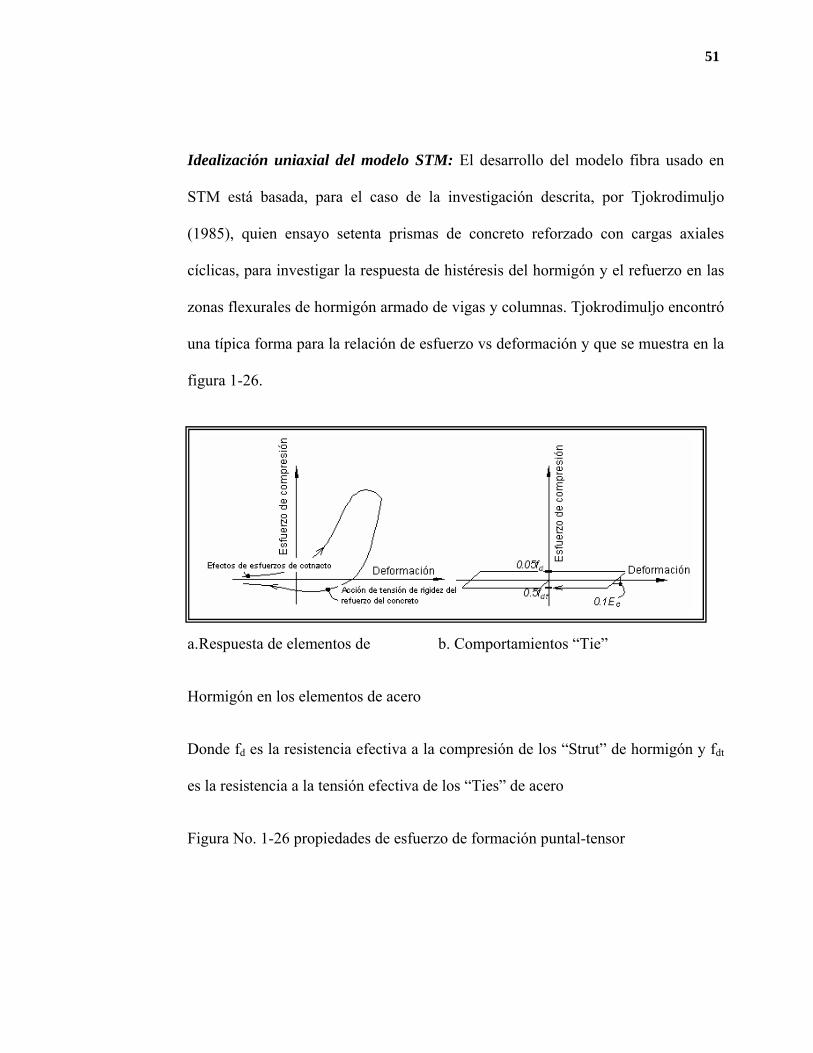
Idealización uniaxial del modelo STM: El desarrollo del modelo fibra usado en
STM está basada, para el caso de la investigación descrita, por Tjokrodimuljo
(1985), quien ensayo setenta prismas de concreto reforzado con cargas axiales
cíclicas, para investigar la respuesta de histéresis del hormigón y el refuerzo en las
zonas flexurales de hormigón armado de vigas y columnas. Tjokrodimuljo encontró
una típica forma para la relación de esfuerzo vs deformación y que se muestra en la
figura 1-26.
a. Respuesta de elementos de b. Comportamientos “Tie”
Hormigón en los elementos de acero
Donde fd es la resistencia efectiva a la compresión de los “Strut” de hormigón y fdt
es la resistencia a la tensión efectiva de los “Ties” de acero
Figura No. 1-26 propiedades de esfuerzo de formación puntal-tensor
52
En esta figura se ilustra el contraste de los “Efectos de esfuerzos de contacto” por el
esfuerzo a compresión que no es cero junto con el cero de deformación en el patrón
de carga. Esto ocurre por el efecto de trabazón de las partículas en las grietas del
concreto y su responsabilidad parcial por la elongación de los miembros flexurales
cuando están sujetos a acciones cíclicas (Fenwick et al 1996). Para replicar este
comportamiento, el elemento “Tie” de comportamiento elastoplástico perfecto y
que es puesto paralelo con el elemento “Strut” que fue desarrollado usando el
modelo histerético de “Strut” de albañilería desarrollado por Crisafulli 1997. Las
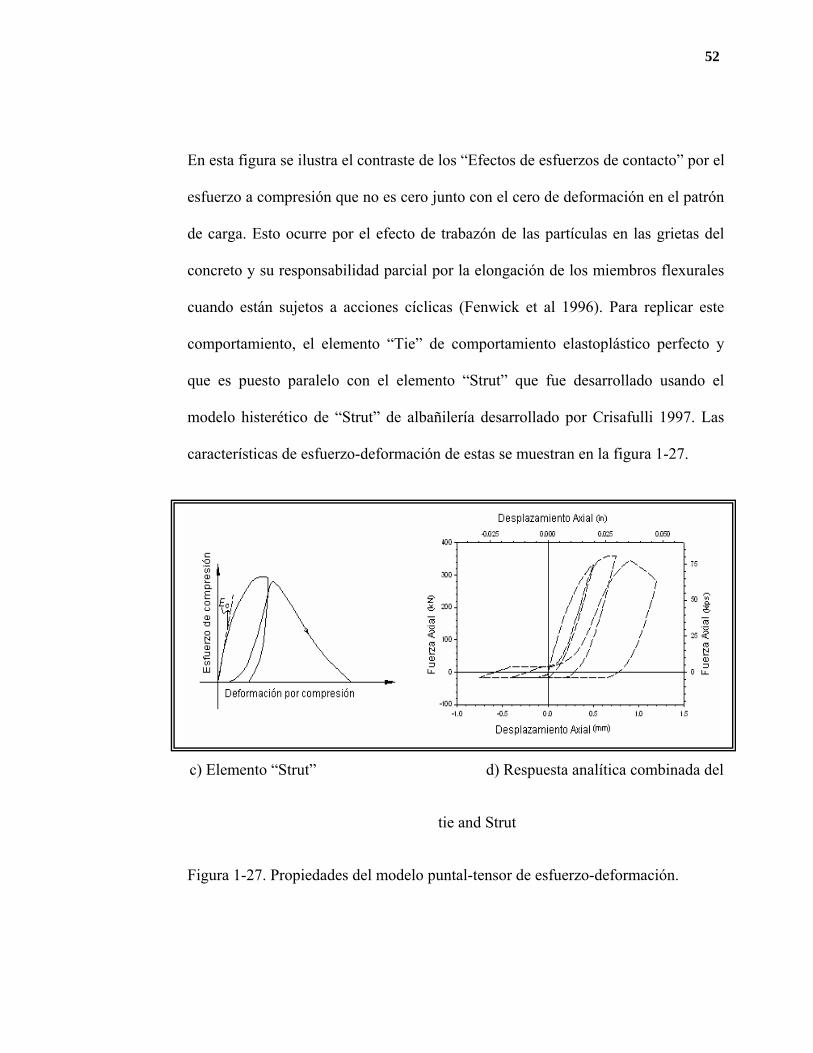
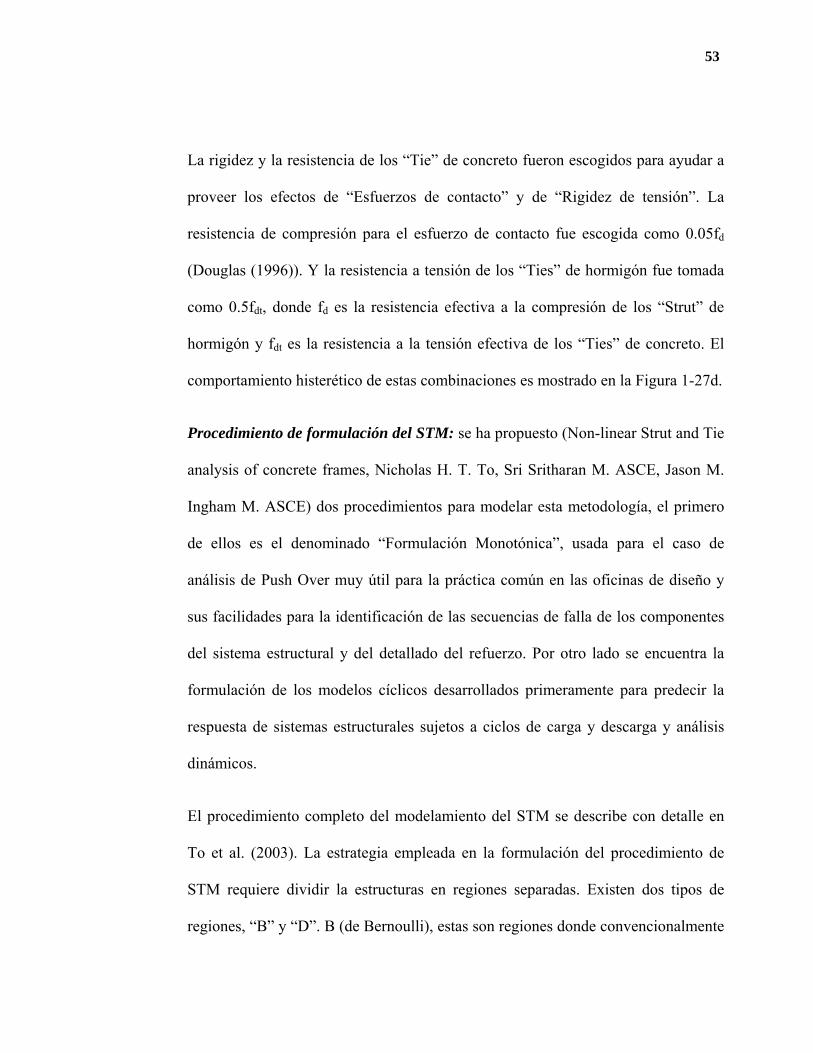
características de esfuerzo-deformación de estas se muestran en la figura 1-27.
c) Elemento “Strut” d) Respuesta analítica combinada del
tie and Strut
Figura 1-27. Propiedades del modelo puntal-tensor de esfuerzo-deformación.
53
La rigidez y la resistencia de los “Tie” de concreto fueron escogidos para ayudar a
proveer los efectos de “Esfuerzos de contacto” y de “Rigidez de tensión”. La
resistencia de compresión para el esfuerzo de contacto fue escogida como 0.05fd
(Douglas (1996)). Y la resistencia a tensión de los “Ties” de hormigón fue tomada
como 0.5fdt, donde fd es la resistencia efectiva a la compresión de los “Strut” de
hormigón y fdt es la resistencia a la tensión efectiva de los “Ties” de concreto. El
comportamiento histerético de estas combinaciones es mostrado en la Figura 1-27d.
Procedimiento de formulación del STM: se ha propuesto (Non-linear Strut and Tie
analysis of concrete frames, Nicholas H. T. To, Sri Sritharan M. ASCE, Jason M.
Ingham M. ASCE) dos procedimientos para modelar esta metodología, el primero
de ellos es el denominado “Formulación Monotónica”, usada para el caso de
análisis de Push Over muy útil para la práctica común en las oficinas de diseño y
sus facilidades para la identificación de las secuencias de falla de los componentes
del sistema estructural y del detallado del refuerzo. Por otro lado se encuentra la
formulación de los modelos cíclicos desarrollados primeramente para predecir la
respuesta de sistemas estructurales sujetos a ciclos de carga y descarga y análisis
dinámicos.
El procedimiento completo del modelamiento del STM se describe con detalle en
To et al. (2003). La estrategia empleada en la formulación del procedimiento de
STM requiere dividir la estructuras en regiones separadas. Existen dos tipos de
regiones, “B” y “D”. B (de Bernoulli), estas son regiones donde convencionalmente
54
la teoría flexural se mantiene y D (de “Disturbed”), donde la distribución interna de
esfuerzo deformación esta significativamente perturbada por las discontinuidades
en la geometría física de las acciones externas aplicadas. El mecanismo de
transferencia de fuerzas en estas dos zonas es significativamente diferente, cada una
es independientemente analizada y diseñada usando diferentes aproximaciones.
La formulación del modelo adopta el patrón de fuerzas que ocurre en las regiones B
en el primer estado de límite de fluencia (siendo este el caso en el que fluye el
refuerzo extremo sometido a tensión o cuando las fibras a compresión del hormigón
alcanzan una deformación de aproximadamente 0.002) en combinación con el
patrón de fuerzas que se desarrolla en las regiones D en el estado último (cuando
los componentes estructurales alcanzan su capacidad máxima de carga y
experimentan significativas deformaciones inelásticas y daños estructurales con la
consecuente degradación de resistencia). El uso de esta combinación de patrones de
fuerza en los diferentes estados es preferible porque facilita la posibilidad de usar
un solo modelo para el análisis en las regiones donde se alcanzan estados elásticos
e inelásticos.
Regiones B: Para regiones denominadas de este tipo en estructuras como vigas y
columnas, el análisis de las secciones sometidas a las fuerzas a compresión están
basadas en la compatibilidad Bernoulli de la condición que las secciones planas
permanecen planas durante la acción de los esfuerzos. Los resultados analíticos de
fuerza de la sección son usados para determinar las áreas efectivas y la resistencia
55
de los miembros del modelo. Los elementos del modelo son localizados con
respecto al centroide de fuerzas medidos a partir del primer estado de fluencia para
cada dirección de la acción. El primer estado de fluencia está definido por el
comienzo de la fluencia del refuerzo en el hormigón que alcanzan un valor de
deformación de 0.002, cualquiera que ocurra primero.
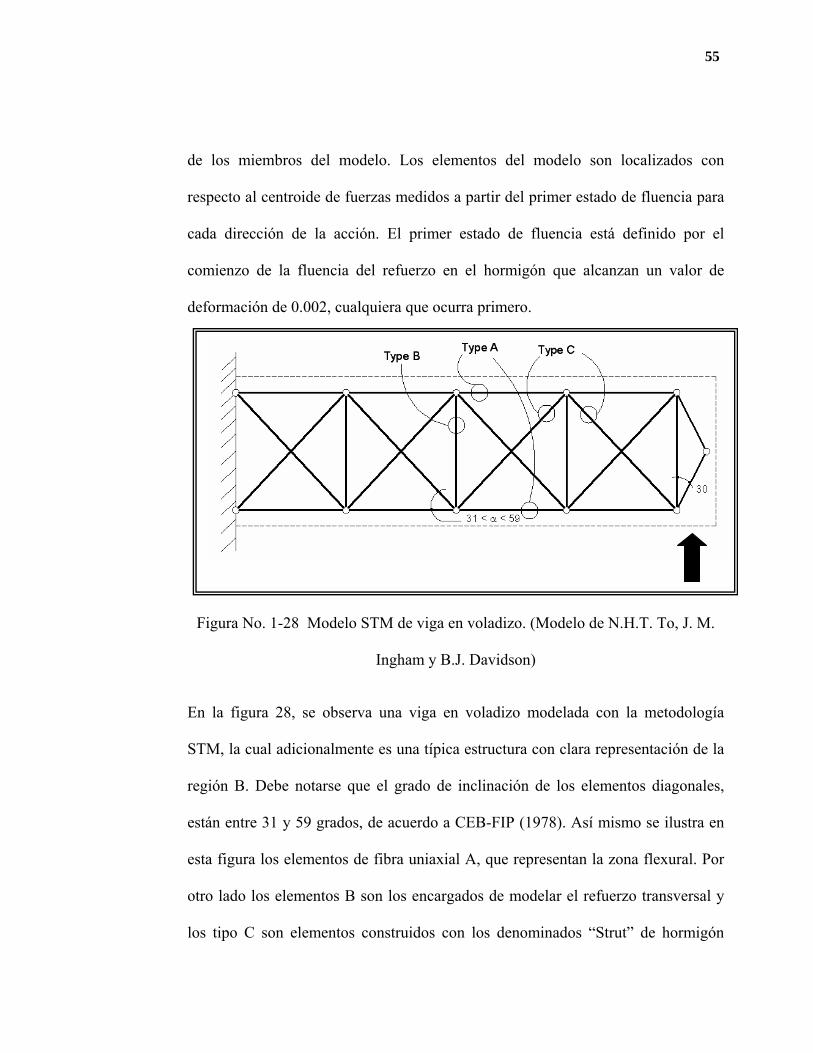
Figura No. 1-28 Modelo STM de viga en voladizo. (Modelo de N.H.T. To, J. M.
Ingham y B.J. Davidson)
En la figura 28, se observa una viga en voladizo modelada con la metodología
STM, la cual adicionalmente es una típica estructura con clara representación de la
región B. Debe notarse que el grado de inclinación de los elementos diagonales,
están entre 31 y 59 grados, de acuerdo a CEB-FIP (1978). Así mismo se ilustra en
esta figura los elementos de fibra uniaxial A, que representan la zona flexural. Por
otro lado los elementos B son los encargados de modelar el refuerzo transversal y
los tipo C son elementos construidos con los denominados “Strut” de hormigón
56
organizados junto con los “Tie” de hormigón para representar las zonas diagonales
del concreto.
Regiones D: Las estructuras donde se debe considerar regiones D. tal como nudos,
deben ser modificadas a partir de los modelos monotónicos reportados en la
literatura (Ingham et al. (1997)), debido a la alta irregularidad en la distribución de
esfuerzos no es posible evaluar esta zona a partir de los métodos convencionales de
la mecánica de sólidos, adicionalmente estas zonas están sujetas a combinaciones
de flexión, corte y de carga axial. La resistencia experimental medida del refuerzo
ha sido usada como la resistencia efectiva de los elementos “Struts-Ties”, mientras
que la resistencia efectiva de los “Struts” se determina usando la tabla 1 de acuerdo
a las condiciones anticipadas de los “Strut” cuando están sujetos a acciones cíclicas
(Sritharan and Ingham (2002)). Más aún, 0.5(f’c)0.5 (Mpa) (Priestley et al. (1996))
ha sido usada para analizar la resistencia efectiva de los “Ties” de hormigón. Todos
los miembros son localizados en el centroide de las fuerzas del correspondiente
mecanismo de transferencia de fuerzas.
RESISTENCIA EFECTIVA DE
LOS “STRUT” CONDICIONES DE LOS “STRUT”
0.68f’c
Este valor es adoptado de los “Struts” localizados en
regiones donde se espera poco agrietamiento. Un
ejemplo de esta aplicación es en nudos preesforzados.
57
0.51f’c
Este valor es apropiado para “Strut” de concreto cuando
el refuerzo cercano no está sujeto a elevado deformación
de endurecimiento. (ε ≤ 0.01).
0.34f’c * Este es el valor máximo de esfuerzo permisible para
“Strut” de concreto cuando hay un potencial desarrollo
de significativa deformación inelástica (ε > 0.02) en las
cercanías del refuerzo.
* Para 0.01 < ε < 0.02, considera una interpolación lineal para obtener los
esfuerzos permisibles apropiados.
TABLA 1-2 Resistencia efectiva de elementos “Strut” de hormigones aplicadas en
regiones D de sistemas de nudos.
1.3 Contenido del estudio
El objetivo principal de este estudio es la realización del análisis inelástico de una
serie de estructuras analizadas y ensayadas experimentalmente previamente en
diferentes institutos mundiales. Este análisis fue realizado bajo los programas
comerciales usados actualmente y bajo las metodologías usuales y las nuevas
metodologías de puntal-tensor.
58
En el primer capítulo se realiza la implementación matemática del marco de
concreto reforzado experimentalmente analizado bajo desplazamientos controlados
por Sozen y Gulkan en 1971. Se estudia bajo modelos aplicando el software
comercial SAP 2000 y bajo la metodología de puntal tensor. Adicionalmente
después de estos dos análisis se realiza un estudio usando Pushover. Posteriormente
se decide realizar un modelo híbrido en el cual se postula una nueva propuesta de
modelamiento usando el método puntal-tensor en las zonas de posible plasticidad y
elementos frames para las otras regiones.
En el segundo capítulo se realiza el estudio de la viga en voladizo de Bertero,
Popov y Wang de 1974. Inicialmente se realiza la evaluación del modelo
matemático usando metodologías tradicionales en SAP 2000 y posteriormente se
realiza la evaluación usando el método del puntal tensor. Y tal como se hizo en el
primer modelo, se plantea un modelo híbrido en el cual se aplican las mejores
resultados obtenidos en los dos primeros modelos de prueba.
El capítulo tercero trata sobre el análisis del estudio en simulador sísmico de un
marco de hormigón armado, P. Hidalgo y .R. W. Clough en 1974. Igualmente se
realiza la evaluación del modelo matemático usando metodologías tradicionales en
SAP2000 y la evaluación del modelo matemático usando metodologías del puntal-
tensor y un modelo híbrido que aplique los dos conceptos anteriores.

59
2. IMPLEMENTACIÓN MATEMÁTICA DEL MARCO DE CONCRETO
REFORZADO EXPERIMENTALMENTE ANALIZADO BAJO
DESPLAZAMIENTOS CONTROLADOS POR SOZEN Y GULKAN-1971
Con el fin de probar las capacidades del software SAP2000 v.11.0.0 en cuanto a análisis
inelástico se refiere, se usará para ello el marco en hormigón armado a escala reducida
probado por Gulkan y Sozen en la Universidad de Illiniois en 1971, sujeto a
desplazamiento cíclico controlado. Dado que para ese caso se usaron varias series, se
tomará la serie F como representativa de la comparación, se debe tener en cuenta que se
trata de uno de los ensayos sobre la estructura virgen (Ver figura No. 2.2).
En primera instancia se definen la geometría y configuración de los elementos tal
como lo define la siguiente figura:
Figura No. 2.1 Esquema representativo del marco
60
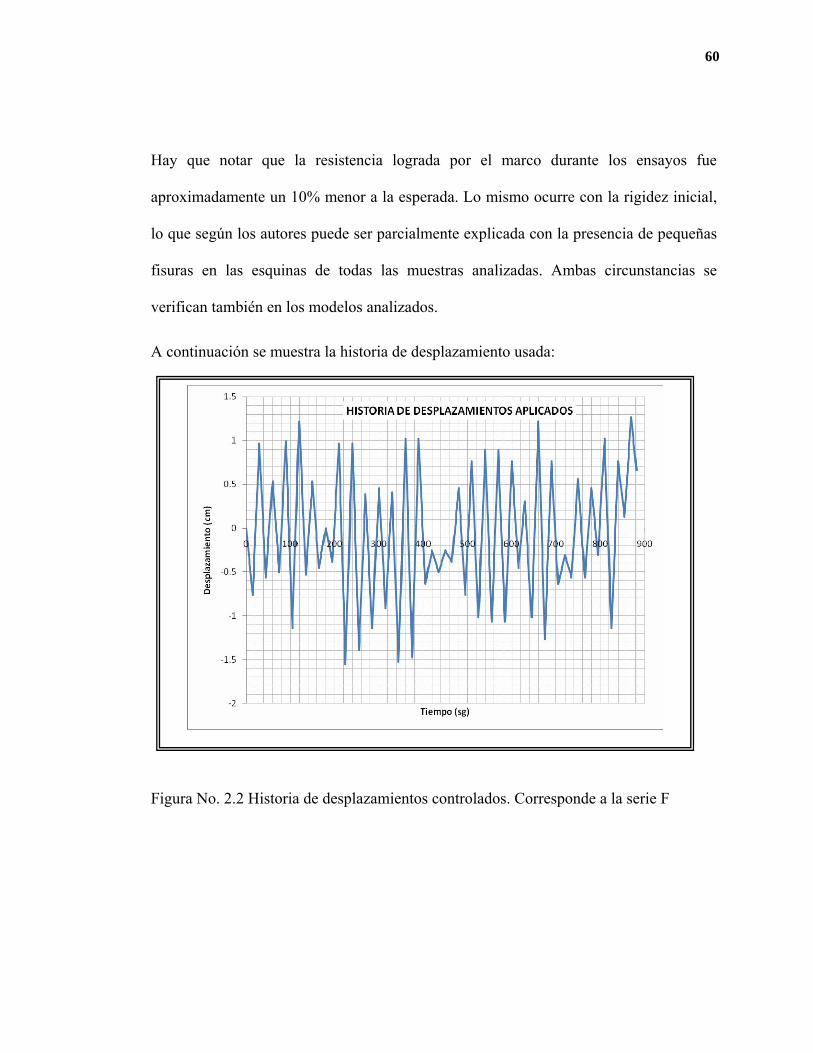
Hay que notar que la resistencia lograda por el marco durante los ensayos fue
aproximadamente un 10% menor a la esperada. Lo mismo ocurre con la rigidez inicial,
lo que según los autores puede ser parcialmente explicada con la presencia de pequeñas
fisuras en las esquinas de todas las muestras analizadas. Ambas circunstancias se
verifican también en los modelos analizados.
A continuación se muestra la historia de desplazamiento usada:
Figura No. 2.2 Historia de desplazamientos controlados. Corresponde a la serie F
61
2.1 Evaluación del modelo matemático usando metodologías
tradicionales en SAP2000 V. 11.
2.1.1 Evaluación del modelo matemático usando “Hinges” como
elemento inelástico
En primera instancia se especifican al software SAP2000 los materiales a usar.
Para ello, y gracias a los resultados experimentales de ensayos de cilindros y del
acero de refuerzo se introdujeron las gráficas correspondientes a esfuerzo-
deformación de los mismos.
Posteriormente se definen los elementos “Rotulas Plásticas” teniendo en cuenta
que se toman para cada columna y viga con deformación controlada, esto se puede
ver con más claridad en la Figura 2.3, donde se ha colocado una impresión de
pantalla con el menú inicial de elección de “Hinges Properties”, una vez elegida
esta opción en el menú descrito anteriormente se adicionan como “add Properties”
los nombres de los elementos a ser usados. Para este caso y dado el uso de
elementos columnas y vigas se decide tomar como nombres de las rótulas plásticas
Col y Vig. Los elementos Hinges llamados como col tienen como característica
que son elementos sometidos a cargas axiales y flexión ver figura 2.4 y esto es
definido en la opción de “P-M3 Interaction”, el SAP 2000 tiene la posibilidad de
involucrar estos dos campos de esfuerzos. Adicionalmente, se puede observar en

62
las opciones que se tiene en SAP2000 para el caso del elemento col, que se puede
elegir entre el tipo de especificación del hinge, para este caso se toma la alternativa
de Moment – Curvatura, ya que permite definir la longitud de la rotula. Otro de los
temas de los cuales se puede elegir, es las condiciones de dependencia de simetría
o no simetría para el momento curvatura, la cual fue elegida como condición
simétrica de momento-curvatura por la simpleza del comportamiento de esfuerzos
en este caso en particular, una vez elegidos los parámetros anteriores y en la parte
inferior de la pantalla (ver figura 2.4) se modifica la curva de datos de momento
curvatura de acuerdo a la información presentada por el ensayo experimental
SAP2000 una vez tomada esta casilla, abre otra ventana donde el usuario puede
introducir 5 puntos (A, B, C, D, E) de la curva anteriormente descrita.
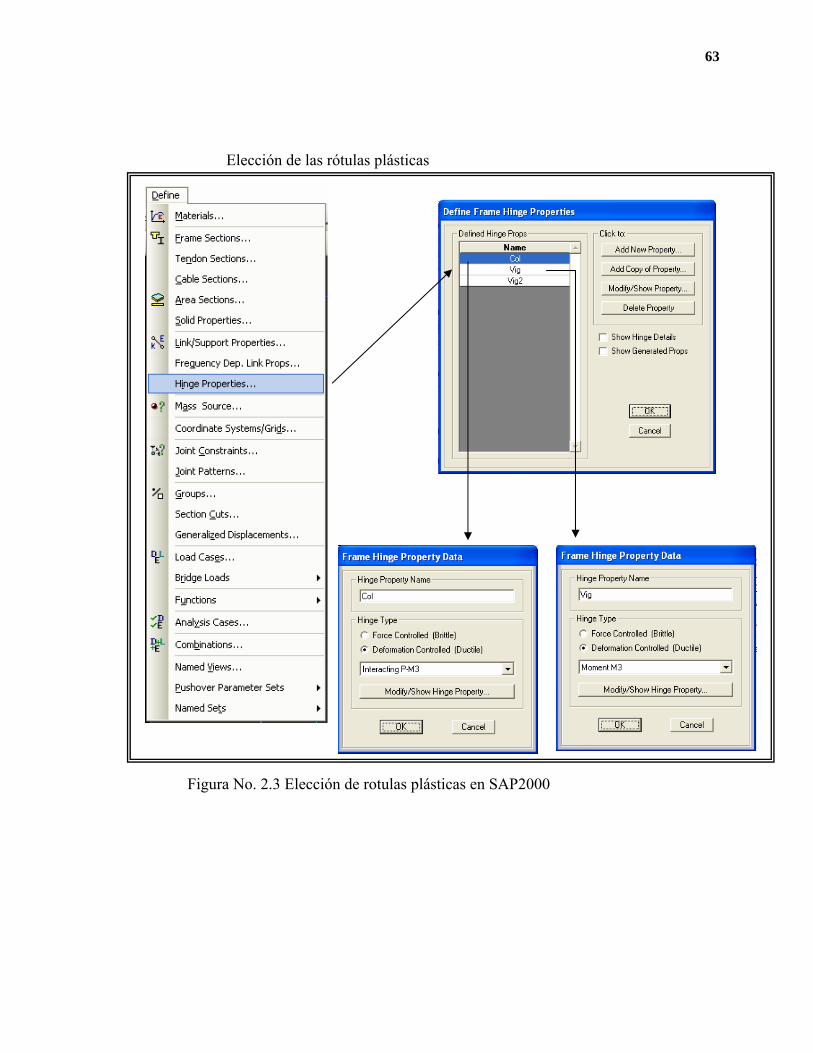
63
Elección de las rótulas plásticas
Figura No. 2.3 Elección de rotulas plásticas en SAP2000
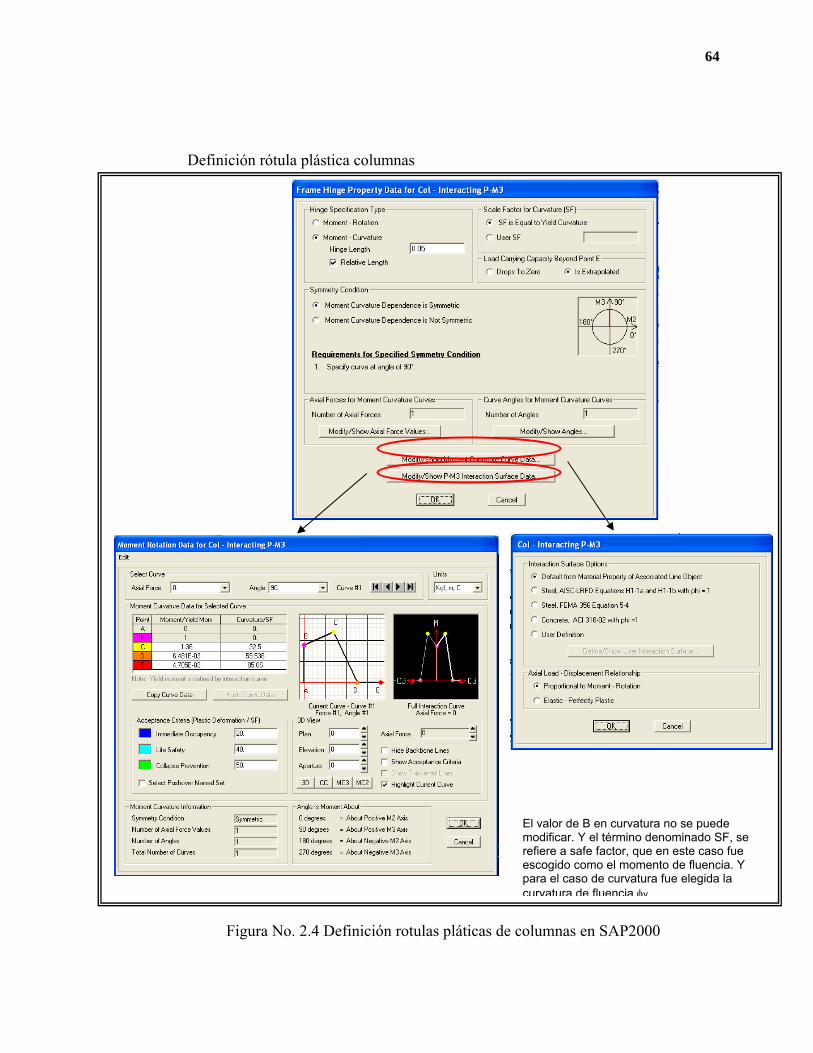
64
Definición rótula plástica columnas
Figura No. 2.4 Definición rotulas pláticas de columnas en SAP2000
El valor de B en curvatura no se puede modificar. Y el término denominado SF, se refiere a safe factor, que en este caso fue escogido como el momento de fluencia. Y para el caso de curvatura fue elegida la curvatura de fluencia φy.
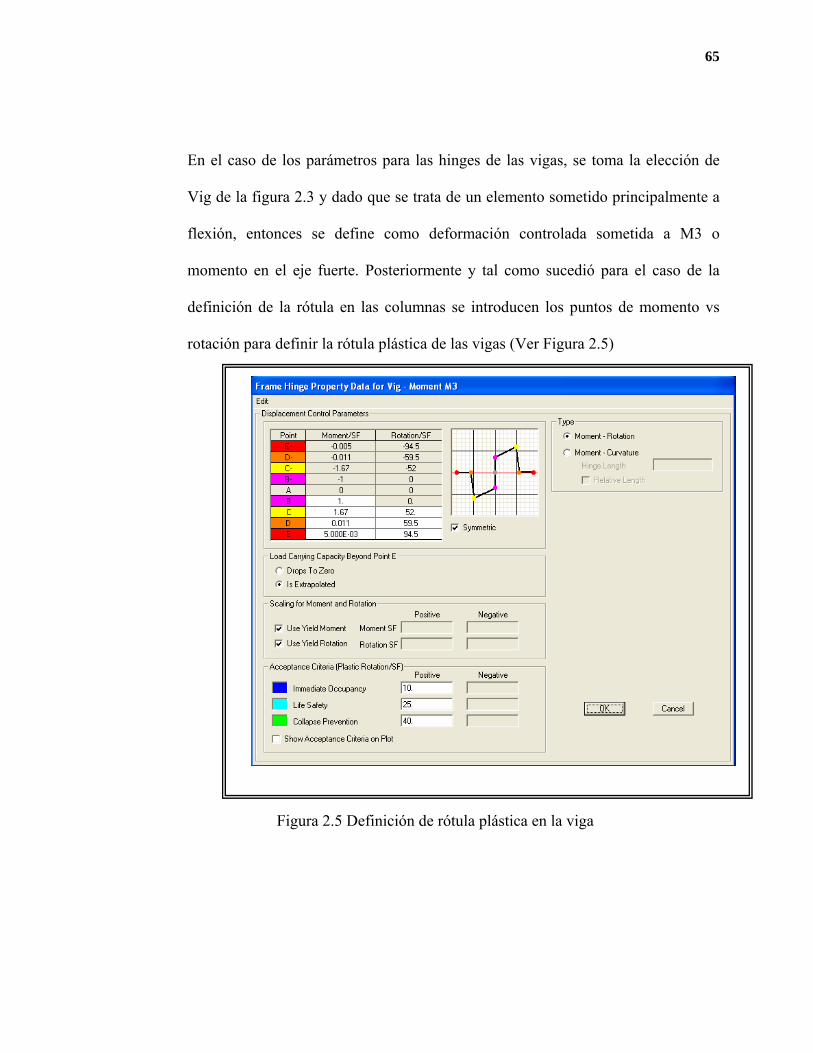
65
En el caso de los parámetros para las hinges de las vigas, se toma la elección de
Vig de la figura 2.3 y dado que se trata de un elemento sometido principalmente a
flexión, entonces se define como deformación controlada sometida a M3 o
momento en el eje fuerte. Posteriormente y tal como sucedió para el caso de la
definición de la rótula en las columnas se introducen los puntos de momento vs
rotación para definir la rótula plástica de las vigas (Ver Figura 2.5)
Figura 2.5 Definición de rótula plástica en la viga
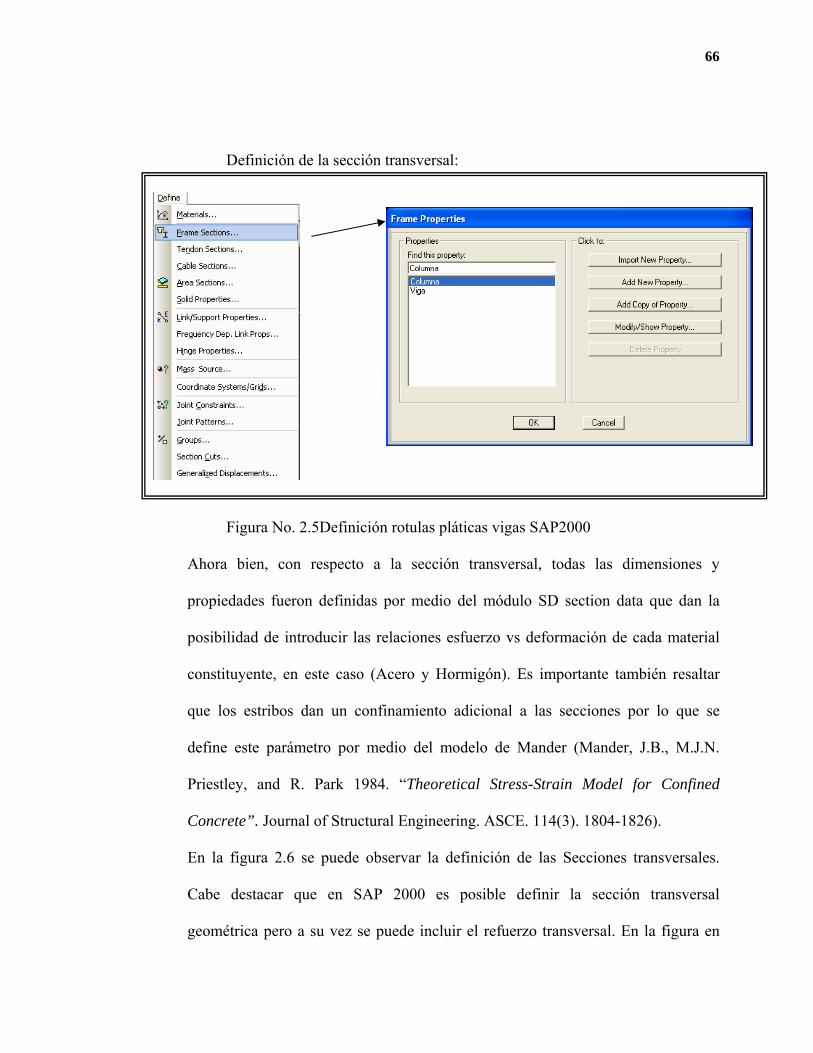
66
Definición de la sección transversal:
Figura No. 2.5Definición rotulas pláticas vigas SAP2000
Ahora bien, con respecto a la sección transversal, todas las dimensiones y
propiedades fueron definidas por medio del módulo SD section data que dan la
posibilidad de introducir las relaciones esfuerzo vs deformación de cada material
constituyente, en este caso (Acero y Hormigón). Es importante también resaltar
que los estribos dan un confinamiento adicional a las secciones por lo que se
define este parámetro por medio del modelo de Mander (Mander, J.B., M.J.N.
Priestley, and R. Park 1984. “Theoretical Stress-Strain Model for Confined
Concrete”. Journal of Structural Engineering. ASCE. 114(3). 1804-1826).
En la figura 2.6 se puede observar la definición de las Secciones transversales.
Cabe destacar que en SAP 2000 es posible definir la sección transversal
geométrica pero a su vez se puede incluir el refuerzo transversal. En la figura en
67
mención se observa las ventanas referenciadas a la definición geométrica de la
sección transversal de la columna, se introduce la opción de SD Section data y
posteriormente se introduce la alternativa de “Section Designer”, desde aquí se
abre una nueva ventana donde el usuario puede introducir la figura geometrica
como si se tratara de un programa del tipo CAD. Adicionalmente cuando se desean
definir las propiedades de dicha sección se puede definir cada posición del
refuerzo y lo más importante se puede definir la curva constitutiva del hormigón y
del acero. Ver figura 2.6. Si bien es cierto la definición de la curva está basada en
parámetros establecidos de acuerdo a modelos, sigue siendo de gran ayuda para el
usuario.
Así como en el caso de la columna también se ha definido las características de la
sección de la viga (Ver figura 2.7) donde igualmente se introduce en el SAP 2000
la opción de SD Section y se define las dos curvas constitutivas, del acero y del
hormigón.
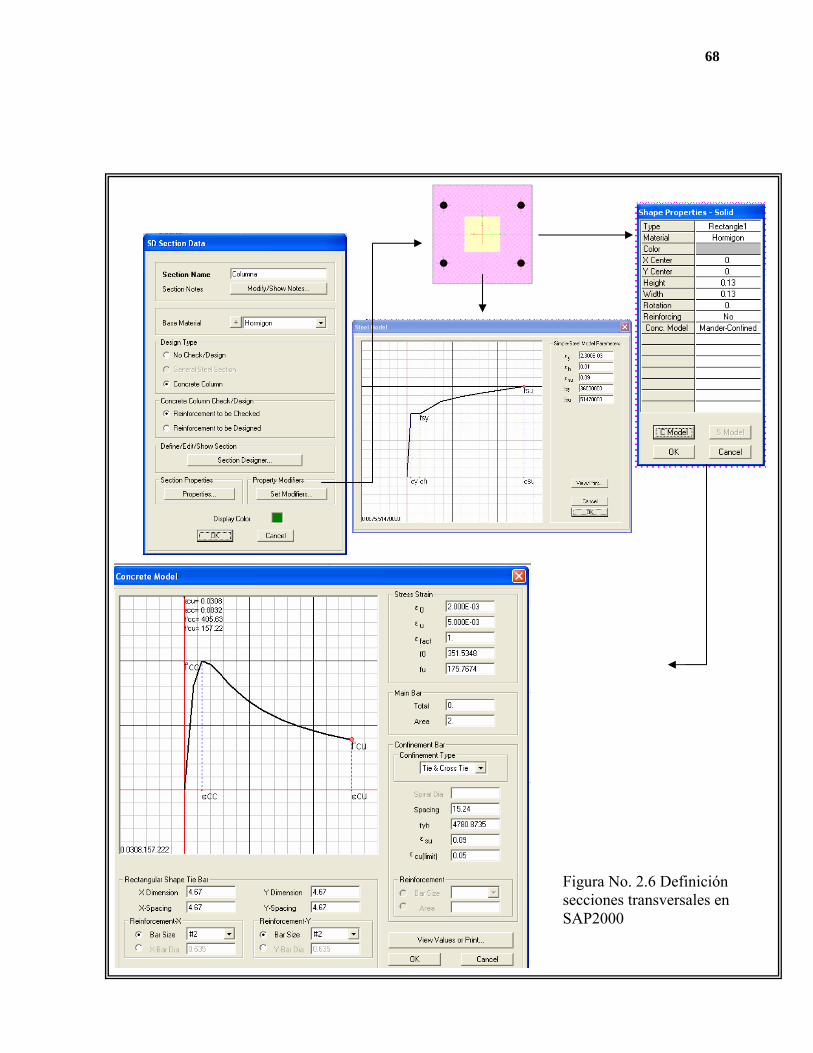
68
Figura No. 2.6 Definición secciones transversales en SAP2000
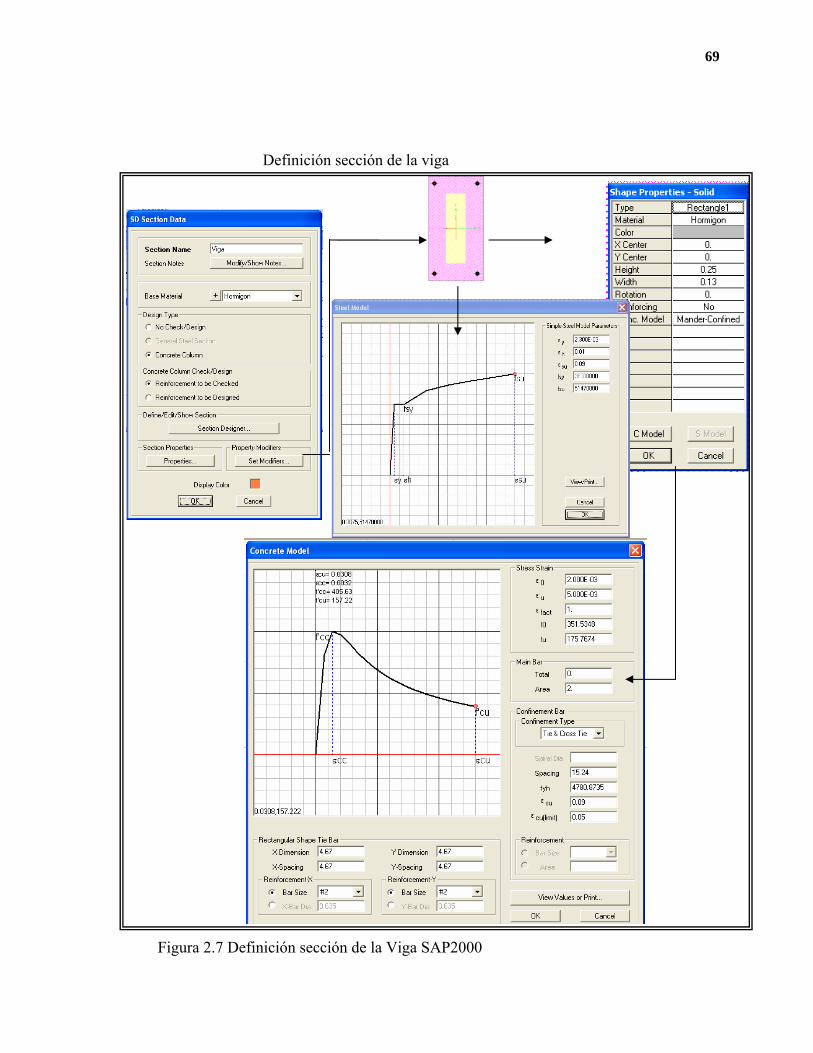
69
Definición sección de la viga
Figura 2.7 Definición sección de la Viga SAP2000
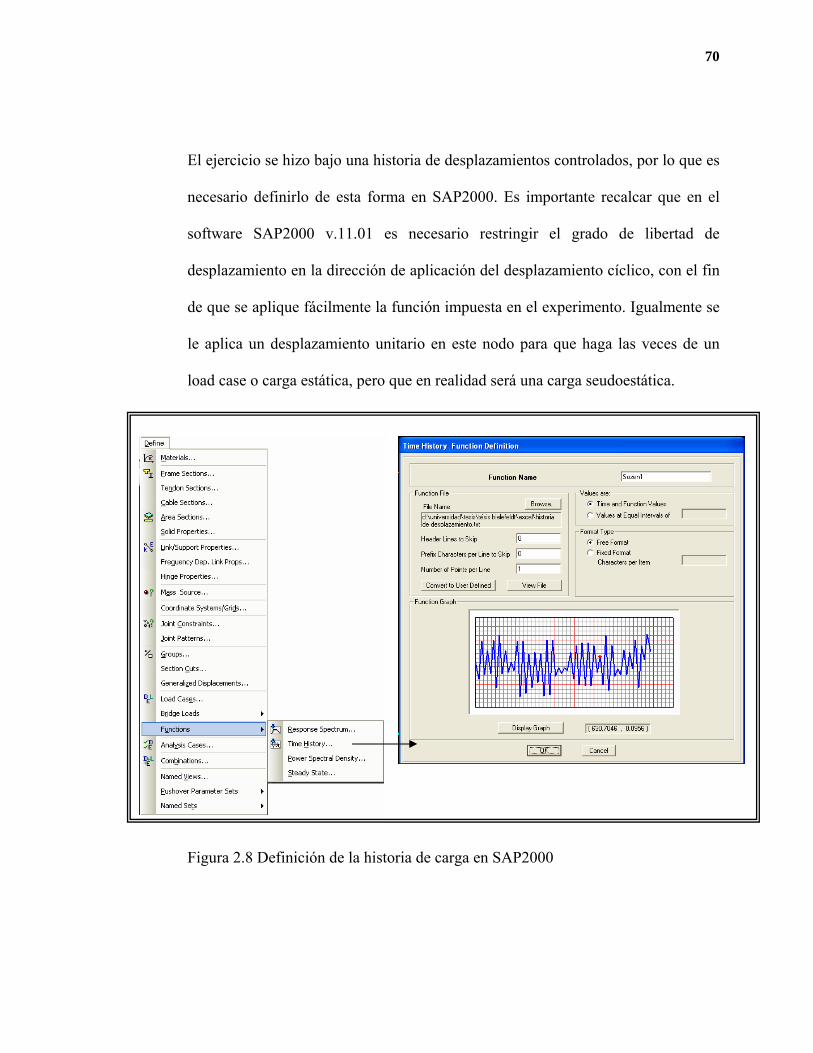
70
El ejercicio se hizo bajo una historia de desplazamientos controlados, por lo que es
necesario definirlo de esta forma en SAP2000. Es importante recalcar que en el
software SAP2000 v.11.01 es necesario restringir el grado de libertad de
desplazamiento en la dirección de aplicación del desplazamiento cíclico, con el fin
de que se aplique fácilmente la función impuesta en el experimento. Igualmente se
le aplica un desplazamiento unitario en este nodo para que haga las veces de un
load case o carga estática, pero que en realidad será una carga seudoestática.
Figura 2.8 Definición de la historia de carga en SAP2000
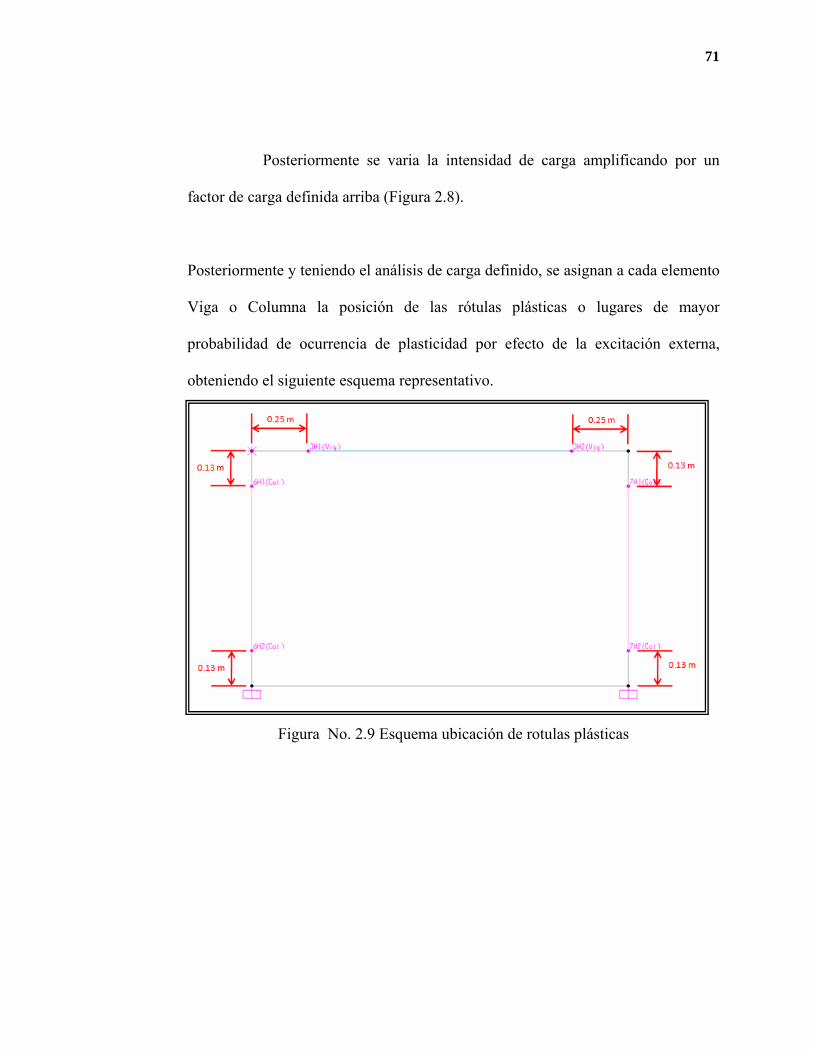
71
Posteriormente se varia la intensidad de carga amplificando por un
factor de carga definida arriba (Figura 2.8).
Posteriormente y teniendo el análisis de carga definido, se asignan a cada elemento
Viga o Columna la posición de las rótulas plásticas o lugares de mayor
probabilidad de ocurrencia de plasticidad por efecto de la excitación externa,
obteniendo el siguiente esquema representativo.
Figura No. 2.9 Esquema ubicación de rotulas plásticas
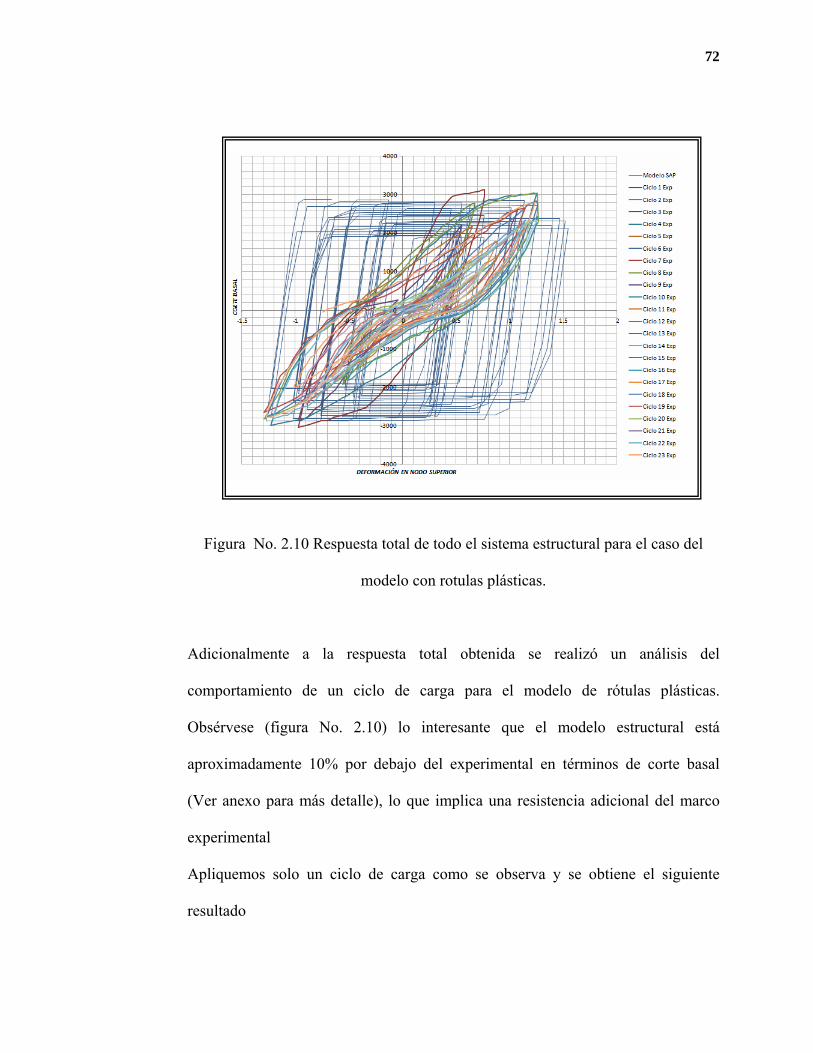
72
Figura No. 2.10 Respuesta total de todo el sistema estructural para el caso del
modelo con rotulas plásticas.
Adicionalmente a la respuesta total obtenida se realizó un análisis del
comportamiento de un ciclo de carga para el modelo de rótulas plásticas.
Obsérvese (figura No. 2.10) lo interesante que el modelo estructural está
aproximadamente 10% por debajo del experimental en términos de corte basal
(Ver anexo para más detalle), lo que implica una resistencia adicional del marco
experimental
Apliquemos solo un ciclo de carga como se observa y se obtiene el siguiente
resultado
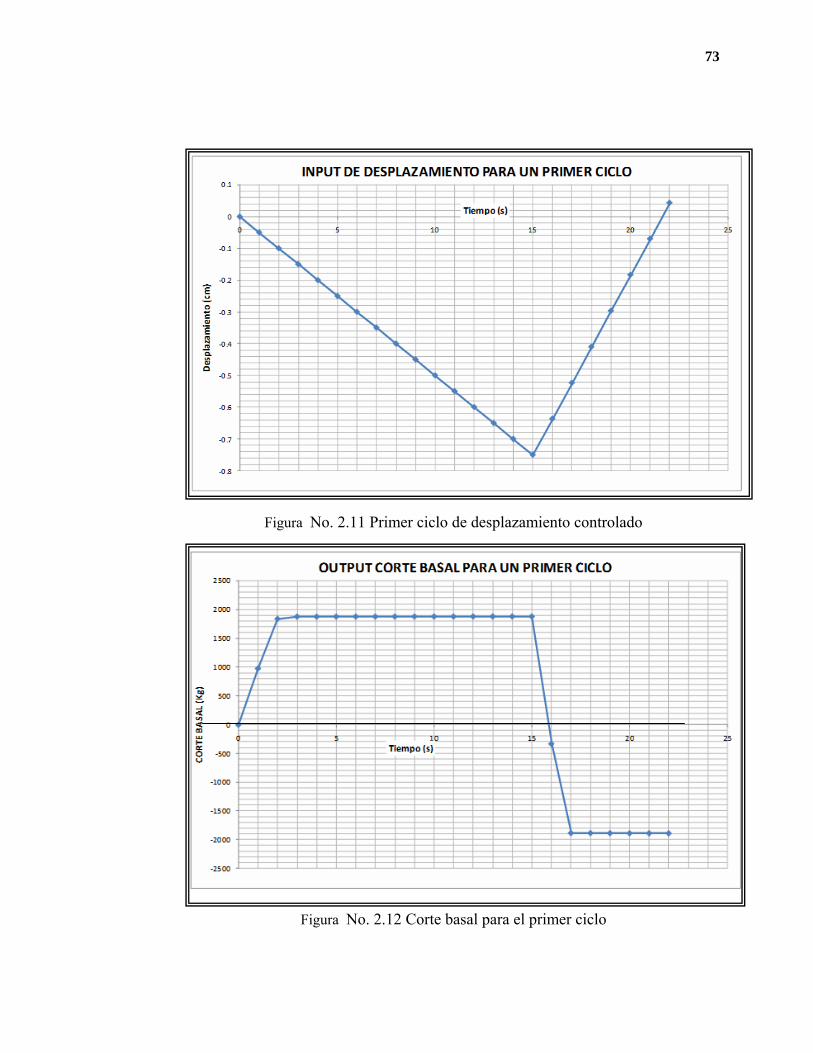
73
Figura No. 2.11 Primer ciclo de desplazamiento controlado
Figura No. 2.12 Corte basal para el primer ciclo
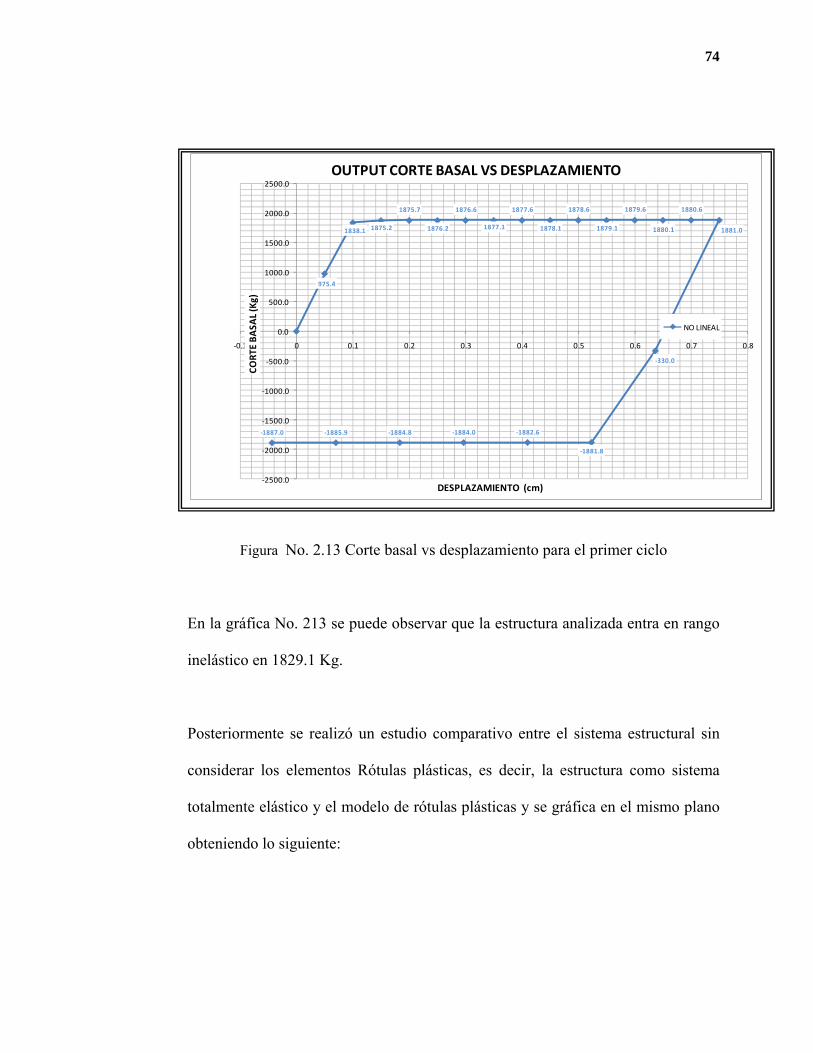
74
975.4
1838.1 1875.2
1875.7
1876.2
1876.6
1877.1
1877.6
1878.1
1878.6
1879.1
1879.6
1880.1
1880.6
1881.0
‐330.0
‐1881.8
‐1882.6‐1884.0‐1884.8‐1885.9‐1887.0
‐2500.0
‐2000.0
‐1500.0
‐1000.0
‐500.0
0.0
500.0
1000.0
1500.0
2000.0
2500.0
‐0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
CORT
E BA
SAL (Kg)
DESPLAZAMIENTO (cm)
OUTPUT CORTE BASAL VS DESPLAZAMIENTO
NO LINEAL
Figura No. 2.13 Corte basal vs desplazamiento para el primer ciclo
En la gráfica No. 213 se puede observar que la estructura analizada entra en rango
inelástico en 1829.1 Kg.
Posteriormente se realizó un estudio comparativo entre el sistema estructural sin
considerar los elementos Rótulas plásticas, es decir, la estructura como sistema
totalmente elástico y el modelo de rótulas plásticas y se gráfica en el mismo plano
obteniendo lo siguiente:
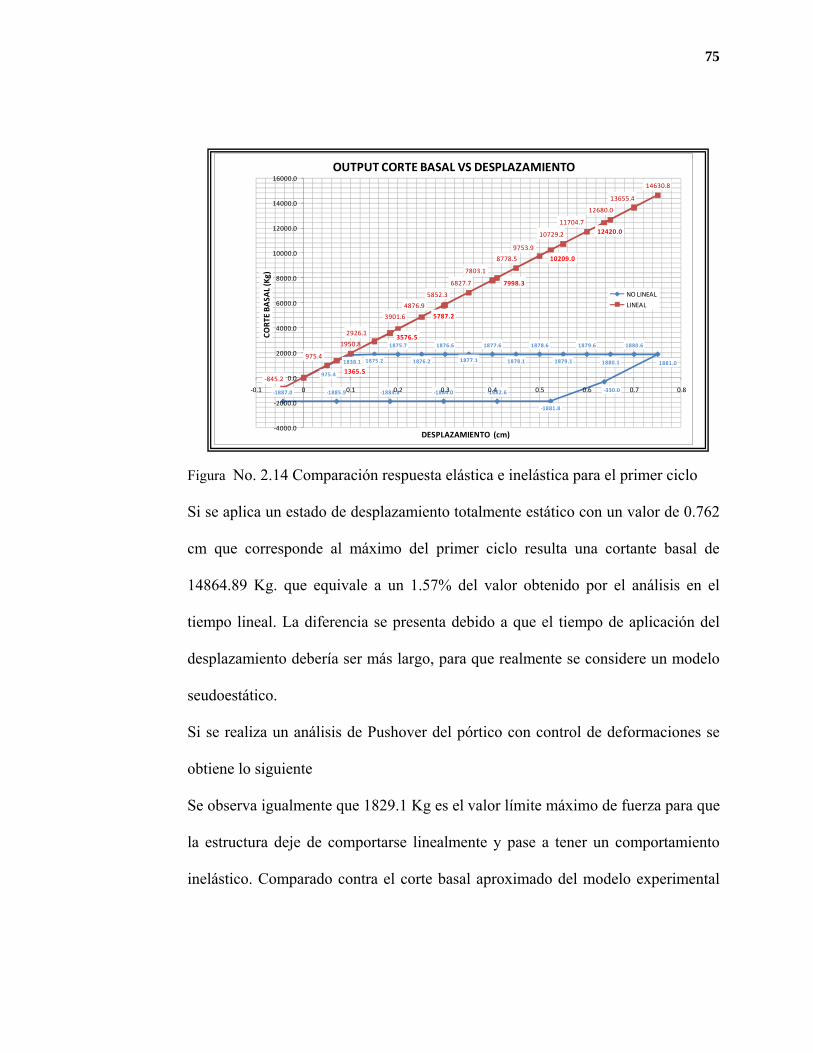
75
975.4
1838.1 1875.2
1875.7
1876.2
1876.6
1877.1
1877.6
1878.1
1878.6
1879.1
1879.6
1880.1
1880.6
1881.0
‐330.0
‐1881.8
‐1882.6‐1884.0‐1884.8‐1885.9‐1887.0
975.4
1950.8
2926.1
3901.6
4876.9
5852.3
6827.7
7803.1
8778.5
9753.9
10729.2
11704.7
12680.0
13655.4
14630.8
12420.0
10209.0
7998.3
5787.2
3576.5
1365.5‐845.2
‐4000.0
‐2000.0
0.0
2000.0
4000.0
6000.0
8000.0
10000.0
12000.0
14000.0
16000.0
‐0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
CORT
E BA
SAL (Kg)
DESPLAZAMIENTO (cm)
OUTPUT CORTE BASAL VS DESPLAZAMIENTO
NO LINEAL
LINEAL
Figura No. 2.14 Comparación respuesta elástica e inelástica para el primer ciclo
Si se aplica un estado de desplazamiento totalmente estático con un valor de 0.762
cm que corresponde al máximo del primer ciclo resulta una cortante basal de
14864.89 Kg. que equivale a un 1.57% del valor obtenido por el análisis en el
tiempo lineal. La diferencia se presenta debido a que el tiempo de aplicación del
desplazamiento debería ser más largo, para que realmente se considere un modelo
seudoestático.
Si se realiza un análisis de Pushover del pórtico con control de deformaciones se
obtiene lo siguiente
Se observa igualmente que 1829.1 Kg es el valor límite máximo de fuerza para que
la estructura deje de comportarse linealmente y pase a tener un comportamiento
inelástico. Comparado contra el corte basal aproximado del modelo experimental
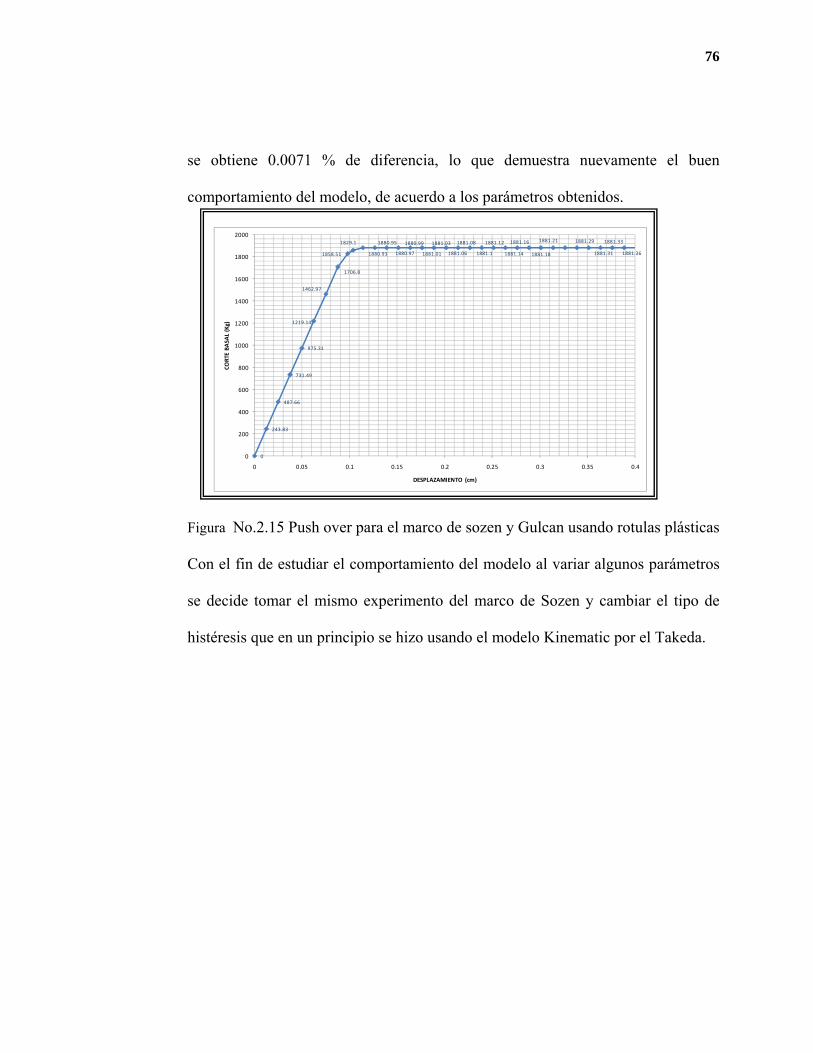
76
se obtiene 0.0071 % de diferencia, lo que demuestra nuevamente el buen
comportamiento del modelo, de acuerdo a los parámetros obtenidos.
Figura No.2.15 Push over para el marco de sozen y Gulcan usando rotulas plásticas
Con el fin de estudiar el comportamiento del modelo al variar algunos parámetros
se decide tomar el mismo experimento del marco de Sozen y cambiar el tipo de
histéresis que en un principio se hizo usando el modelo Kinematic por el Takeda.
0
243.83
487.66
731.49
975.31
1219.14
1462.97
1706.8
1829.1
1858.51 1880.93
1880.95
1880.97
1880.99
1881.01
1881.03
1881.06
1881.08
1881.1
1881.12
1881.14
1881.16
1881.18
1881.21 1881.29
1881.31
1881.33
1881.36
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
CORTE BA
SAL (Kg)
DESPLAZAMIENTO (cm)

77
Figura No. 2.16 Comparación corte basal vs desplazamiento con Takeda y
Kinematic
Como se observa no hay ningún tipo de variación al cambiar el parámetro sobre
tipo de histéresis, La gráfica No. 2.16 muestra este caso de estudio. Ahora se hace
un análisis Pushover nuevamente comparativo.
Figura No. 2.17 Comparación pushover con takeda y kinematic para rótulas
plásticas.
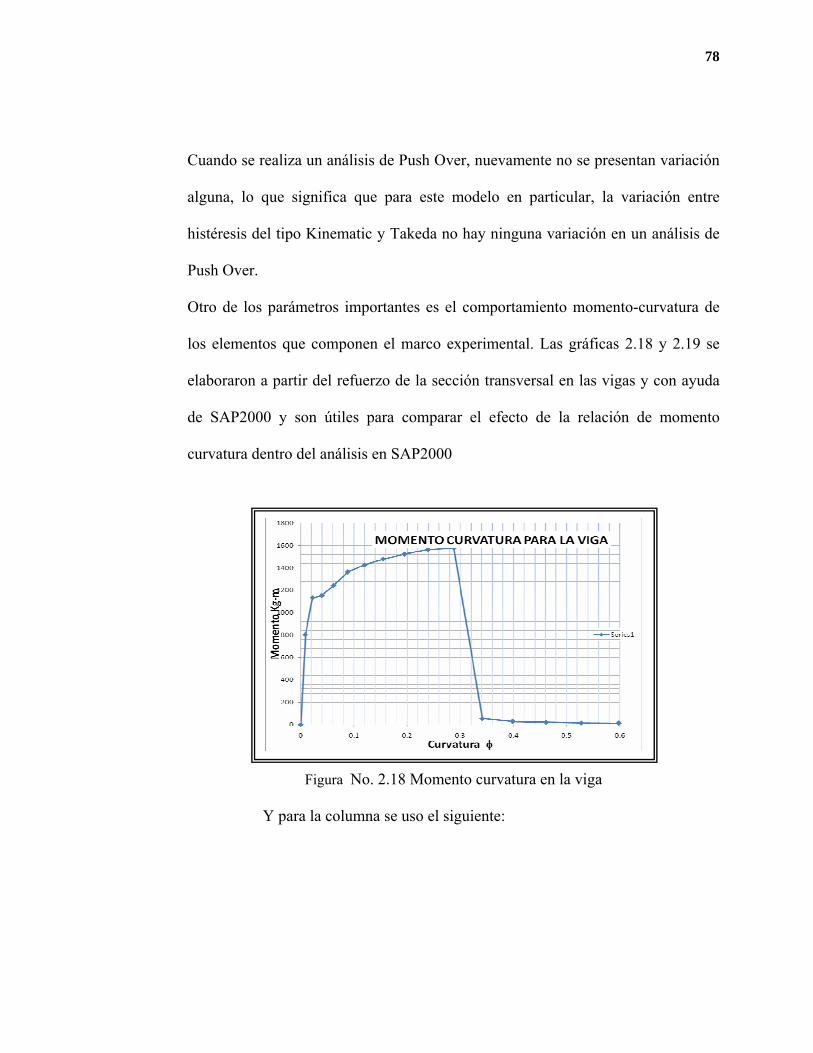
78
Cuando se realiza un análisis de Push Over, nuevamente no se presentan variación
alguna, lo que significa que para este modelo en particular, la variación entre
histéresis del tipo Kinematic y Takeda no hay ninguna variación en un análisis de
Push Over.
Otro de los parámetros importantes es el comportamiento momento-curvatura de
los elementos que componen el marco experimental. Las gráficas 2.18 y 2.19 se
elaboraron a partir del refuerzo de la sección transversal en las vigas y con ayuda
de SAP2000 y son útiles para comparar el efecto de la relación de momento
curvatura dentro del análisis en SAP2000
Figura No. 2.18 Momento curvatura en la viga
Y para la columna se uso el siguiente:

79
Figura No. 2.19 Momento curvatura de la columna
SAP2000 considera el refuerzo inferior y superior para su cálculo. Por otro lado,
SAP2000 tiene la ventaja de definir el diagrama momento curvatura usando la
opción de sección confinada. Adicionalmente se ha graficado el diagrama
momento curvatura para confinado y no confinado en el mismo plano cartesiano,
lo cual se puede observar en la figura 2.20:
Figura No. 2.20 Comparación momento curvatura de la viga confinado y no
confinado

80
Se puede observar que para la viga (Figura No. 2.20), no existe casi variación en
los puntos iníciales. Existe una diferencia de aproximadamente 5% en las
curvaturas finales, cuando el confinamiento comienza a ser relevante, sin embargo
es de anotar que obviamente es superior el momento dado para una misma
curvatura. Con respecto a la columna se obtiene:
Figura No. 2.21 Comparación momento curvatura columna confinada y no
confinada
Por otro lado en el caso de la columna si se nota una diferencia del 20% entre
confinado y no confinado, sobre todo después del momento de agrietamiento. La
razón fundamental de esta situación es que la cuantía de refuerzo para el elemento
columna es mayor que para la viga.

81
De acuerdo a la figura No. 2.20 se concluye que si se desea incluir la variable de
momento curvatura, se debe cambiar los parámetros definidos en las opciones
sobre rótulas plásticas y NO los definidos dentro de las características de la
sección. En otras palabras, en SAP2000 es indistinto variar el parámetro de
confinamiento dentro de las características de la sección para los análisis
inelásticos. Si se desea observar el comportamiento inelástico del sistema se debe
incluir esta variación dentro de la definición de las rótulas plásticas.
Al hacer esta variación dentro de las rótulas plásticas y graficar la solución para un
solo ciclo se obtiene:
Figura No. 2.22 Comparación V vs D para Takeda confinado y no confinado
No existe ninguna variación para este modelo en particular, sobre todo para el caso
de la columna.
975.4
1838.1 1875.2
1875.7
1876.2
1876.6
1877.1
1877.6
1878.1
1878.6
1879.1
1879.6
1880.1
1880.6
1881.0
‐330.0
‐1881.8
‐1882.6‐1884.0‐1884.8‐1885.9‐1887.0
‐2500.0
‐2000.0
‐1500.0
‐1000.0
‐500.0
0.0
500.0
1000.0
1500.0
2000.0
2500.0
‐0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
CORT
E BA
SAL (Kg)
DESPLAZAMIENTO (cm)
OUTPUT CORTE BASAL VS DESPLAZAMIENTO
NO LINEAL Takeda
NO LINEAL Kinematic
NO LINEAL Takeda No confinado
82
Por último y para reconfirmar los resultados por otro método, se decidió aplicar la
cortante basal como una historia de fuerzas extrayendo los desplazamientos del
nudo 1 y comparándolo con la historia de desplazamientos controlados aplicados.
A continuación se muestra la historia de fuerzas aplicadas, cabe destacar que para
este caso el nodo 1 fue liberado de cualquier restricción impuesta anteriormente, ya
que se trata de una historia de fuerzas.
Se realiza una integración directa no lineal y se observa que el método numérico
usado es lento para la complejidad del mismo, llevando el análisis a un tiempo de
más de 2 hr.
Los resultados muestran (Figura No. 2.23), que dan lo mismo, es decir los
desplazamientos del nudo 1 arrojados por la historia de fuerzas coinciden casi
exactamente con la historia de desplazamientos. Cabe destacar que estos dos
análisis se hicieron en el mismo software SAP2000.
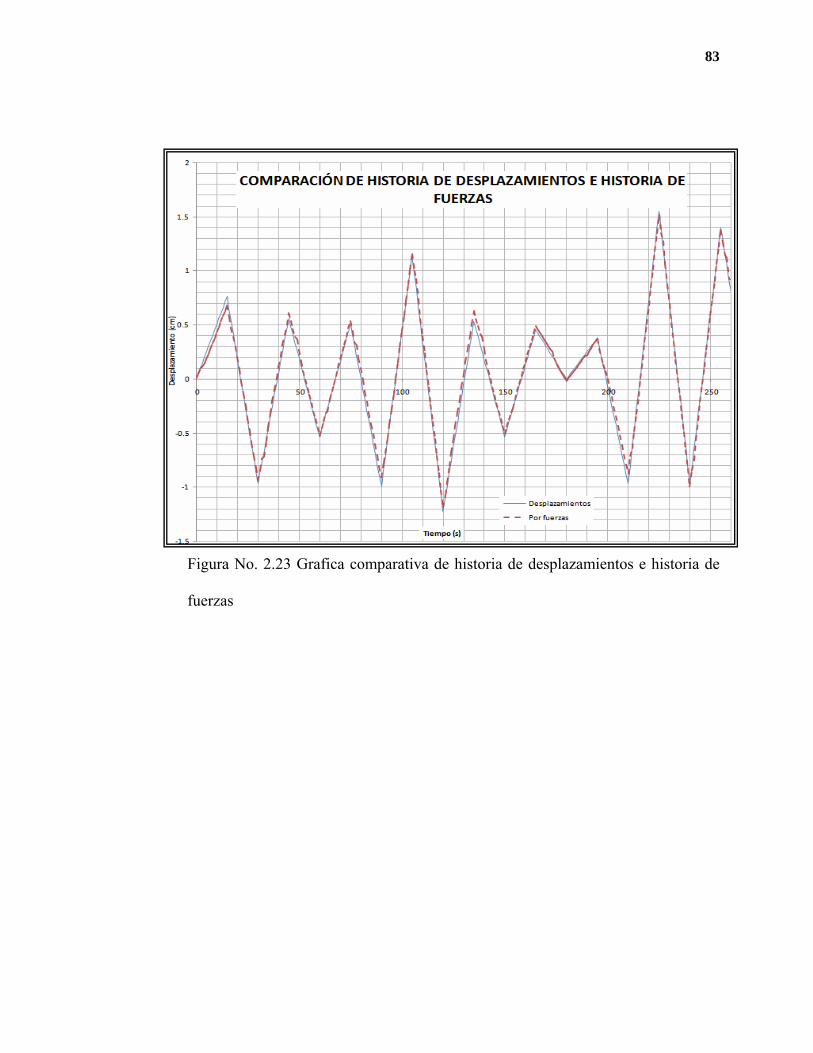
83
Figura No. 2.23 Grafica comparativa de historia de desplazamientos e historia de
fuerzas
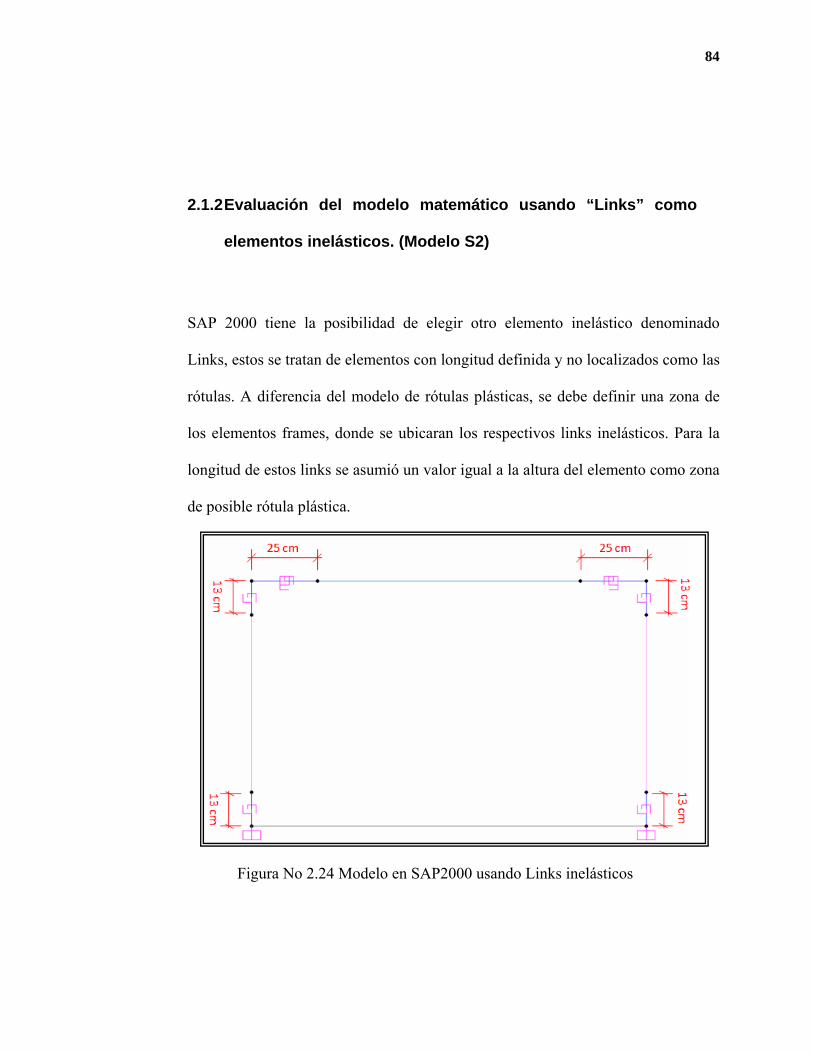
84
2.1.2 Evaluación del modelo matemático usando “Links” como
elementos inelásticos. (Modelo S2)
SAP 2000 tiene la posibilidad de elegir otro elemento inelástico denominado
Links, estos se tratan de elementos con longitud definida y no localizados como las
rótulas. A diferencia del modelo de rótulas plásticas, se debe definir una zona de
los elementos frames, donde se ubicaran los respectivos links inelásticos. Para la
longitud de estos links se asumió un valor igual a la altura del elemento como zona
de posible rótula plástica.
Figura No 2.24 Modelo en SAP2000 usando Links inelásticos
85
Una vez que se tiene la geometría, las secciones transversales y el material
definido de acuerdo a las propiedades anteriormente descritas para el modelo de
rótulas plásticas, se debe definir las propiedades de los links inelástico: Cada uno
de estos elementos tienen la posibilidad en SAP de definir el comportamiento
histerético para cada grado de libertad.
Cabe destacar que se deben elegir una serie de parámetros inelásticos. Para efectos
prácticos el parámetro de la masa y peso están basados en la longitud del tramo
supuesto como links y de la sección transversal de cada elemento. En segundo
lugar los links, permiten definir plasticidad a cada grado de libertad de los nodos
involucrados. De acuerdo a esto, se observa como para la columna y la viga se
definió plasticidad para el grado de libertad R3, correspondiente al giro en sentido
del eje fuerte del elemento.
Igual que para la definición de las rótulas plásticas, es posible definir el tipo de
histéresis, tal como se hizo en el modelo de rótulas plásticas se elige Takeda. Es
importante observar que se debe definir el comportamiento momento rotación de la
sección transversal, para lo que se usó los datos del modelo experimental. La
rigidez efectiva que se observa está definida a partir de las propiedades NO
fisuradas de las sección. Un aspecto importante a resaltar es que los datos de
rotación tienen problemas de convergencia cuando son del orden de 10^-8. Así
mismo la gráfica de Momento rotación no presenta los últimos puntos de la falla
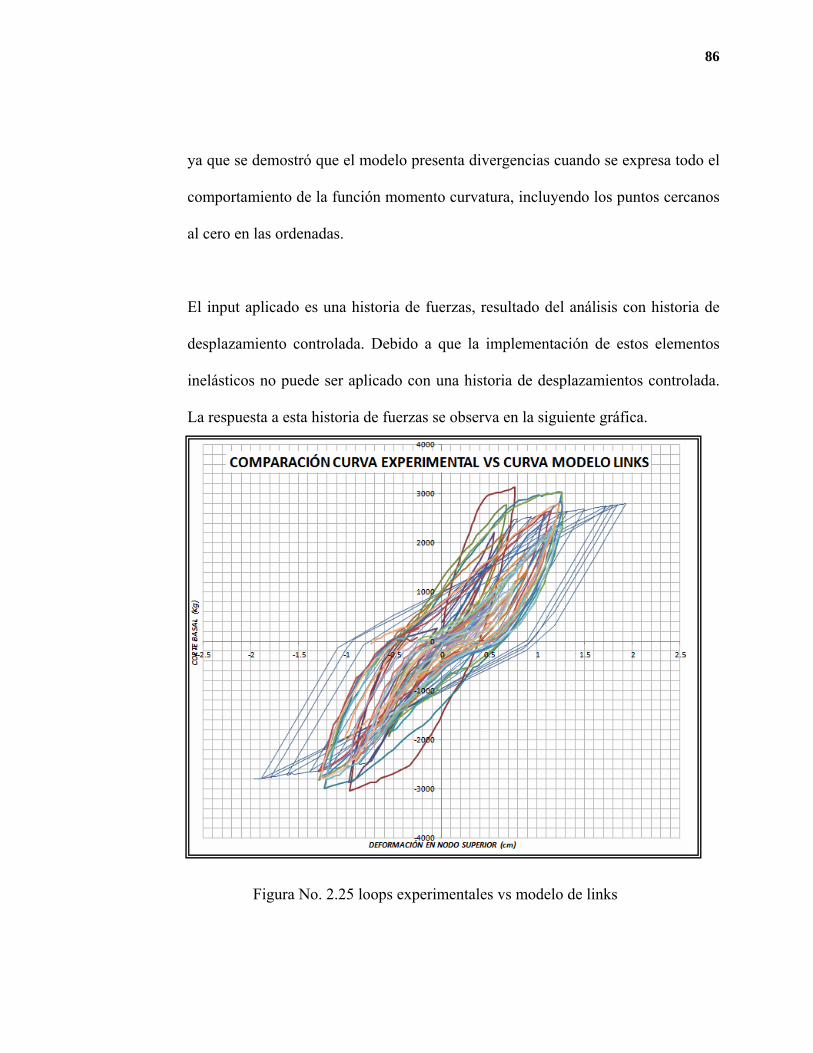
86
ya que se demostró que el modelo presenta divergencias cuando se expresa todo el
comportamiento de la función momento curvatura, incluyendo los puntos cercanos
al cero en las ordenadas.
El input aplicado es una historia de fuerzas, resultado del análisis con historia de
desplazamiento controlada. Debido a que la implementación de estos elementos
inelásticos no puede ser aplicado con una historia de desplazamientos controlada.
La respuesta a esta historia de fuerzas se observa en la siguiente gráfica.
Figura No. 2.40 Definición de la historia de fuerzas
Figura No. 2.25 loops experimentales vs modelo de links
87
Observese en la gráfica No. 2.25 muestra los dos conjuntos de curvas y que
además son muy similares, sin embargo los desplazamientos del modelo
matemático son aproximadamente 33% mayores a las obtenidas en el test de
desplazamientos controlados.
El gran problema de los Links es que son elementos plásticos muy localizados y
esto hace que la respuesta así lo sea, por lo que hay problemas de compatibilidad
de deformaciones y esfuerzos en los puntos de contacto entre el elemento frame y
el elemento link y esto se ve reflejado en el tiempo de análisis y en la convergencia
del mismo en rangos de alta inelasticidad.
88
2.1.3 Evaluación del modelo matemático usando el método del
puntal-tensor. (Modelo S3)
Para el modelamiento del marco de Sozen usando el método del tensor puntal fue
necesario determinar las dimensiones equivalentes para los elementos diagonales y
longitudinales Nicholas H. To (2005). .H.T. To y J.M. Ingham Usan como
estrategia dividir la estructuras en diferentes regiones. Hay dos tipos de regiones,
“B” y “D”, B (Bernoulli), son las denominadas partes donde se asume la teoría
convencional de la flexión y la D (o Disturbed), donde la distribución de esfuerzos
deformación están significativamente afectadas por discontinuidades en la
geometría física.
Adicionalmente Honggun Park y Taesung Eom, diferencian claramente las áreas
equivalentes para las zonas longitudinales y diagonales de los elementos vigas y
columnas, se realizan los siguientes cálculos para cada zona:
1. Columna
Las áreas equivalentes y resistencias a la compresión del hormigón a usar se
calculan teniendo en cuenta la posición del eje a compresión cuando el acero fluye
por primera vez (Figura No. 2.26 Ref. Honggun Park y Taesung Eon))

89
adicionalmente se utiliza lo usado por Honggun Park y Taesung Eom en cuanto al
área de cada elemento.
Elementos longitudinales:
Figura No. 2.26 representación de áreas equivalentes elementos longitudinales
Los elementos equivalentes del tipo 1, son localizados en el centroide de la fuerza
a tracción del refuerzo en las zonas denominadas regiones B. El procedimiento es
muy sencillo. Primero se calcula d’ correspondiente a la distancia desde los bordes
hasta el centroide de la posición del refuerzo, con este valor se determina a, o el
brazo de la zona a compresión de acuerdo al rectángulo equivalente,
posteriormente se determina c usando para ello el parámetro de equivalencia β y
con este valor y el centroide de la parábola a compresión se determina las áreas
equivalentes de acuerdo a las figuras anteriores.
Ac (cm2) 20.176Dc (cm) 5.07
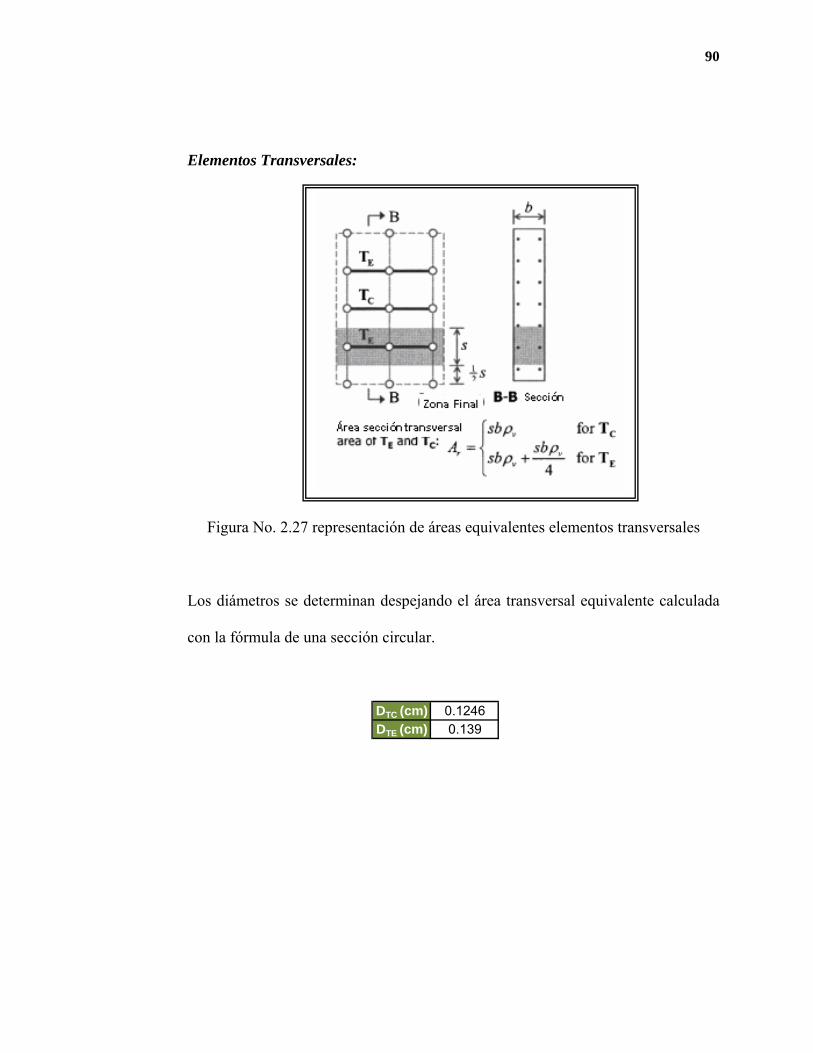
90
Elementos Transversales:
Figura No. 2.27 representación de áreas equivalentes elementos transversales
Los diámetros se determinan despejando el área transversal equivalente calculada
con la fórmula de una sección circular.
DTC (cm) 0.1246DTE (cm) 0.139
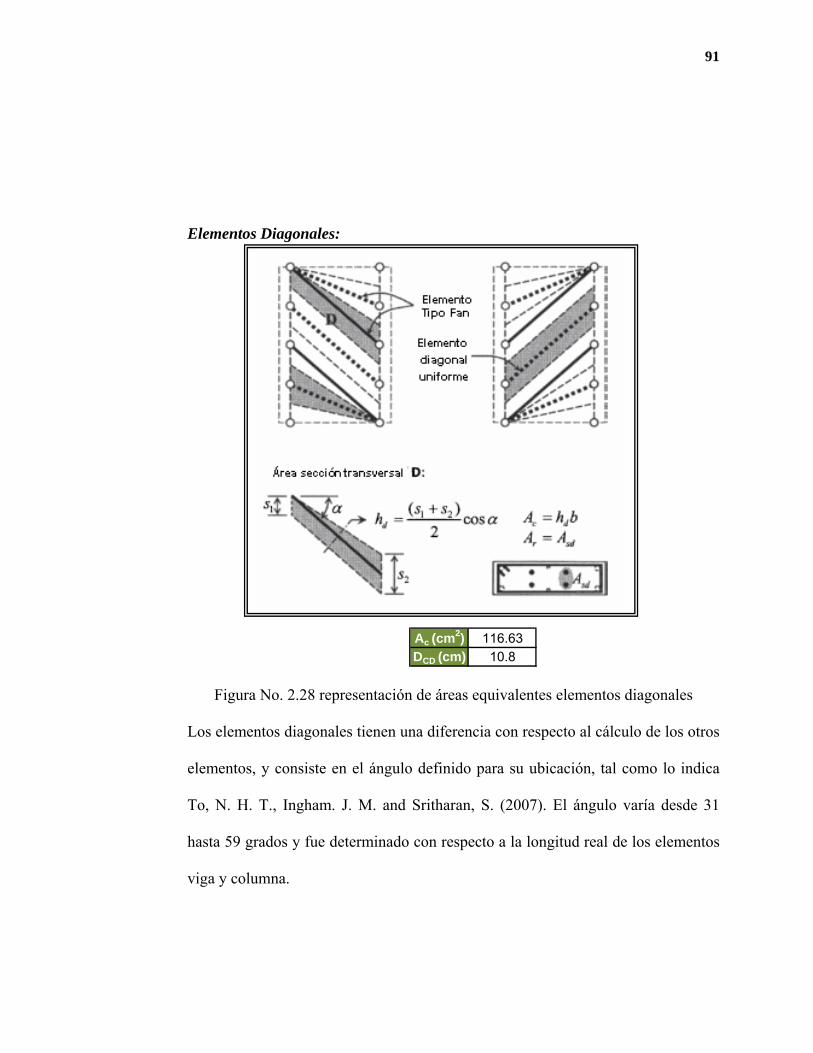
91
Elementos Diagonales:
Ac (cm2) 116.63DCD (cm) 10.8
Figura No. 2.28 representación de áreas equivalentes elementos diagonales
Los elementos diagonales tienen una diferencia con respecto al cálculo de los otros
elementos, y consiste en el ángulo definido para su ubicación, tal como lo indica
To, N. H. T., Ingham. J. M. and Sritharan, S. (2007). El ángulo varía desde 31
hasta 59 grados y fue determinado con respecto a la longitud real de los elementos
viga y columna.
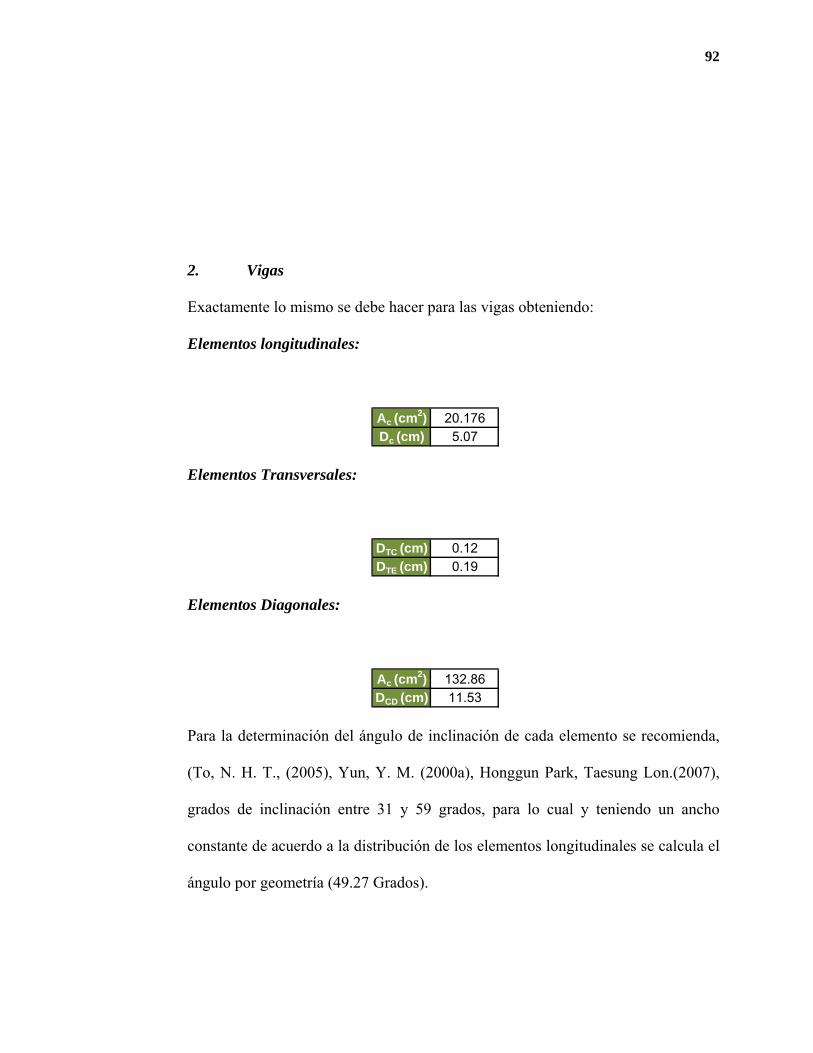
92
2. Vigas
Exactamente lo mismo se debe hacer para las vigas obteniendo:
Elementos longitudinales:
Ac (cm2) 20.176Dc (cm) 5.07
Elementos Transversales:
DTC (cm) 0.12DTE (cm) 0.19
Elementos Diagonales:
Ac (cm2) 132.86DCD (cm) 11.53
Para la determinación del ángulo de inclinación de cada elemento se recomienda,
(To, N. H. T., (2005), Yun, Y. M. (2000a), Honggun Park, Taesung Lon.(2007),
grados de inclinación entre 31 y 59 grados, para lo cual y teniendo un ancho
constante de acuerdo a la distribución de los elementos longitudinales se calcula el
ángulo por geometría (49.27 Grados).
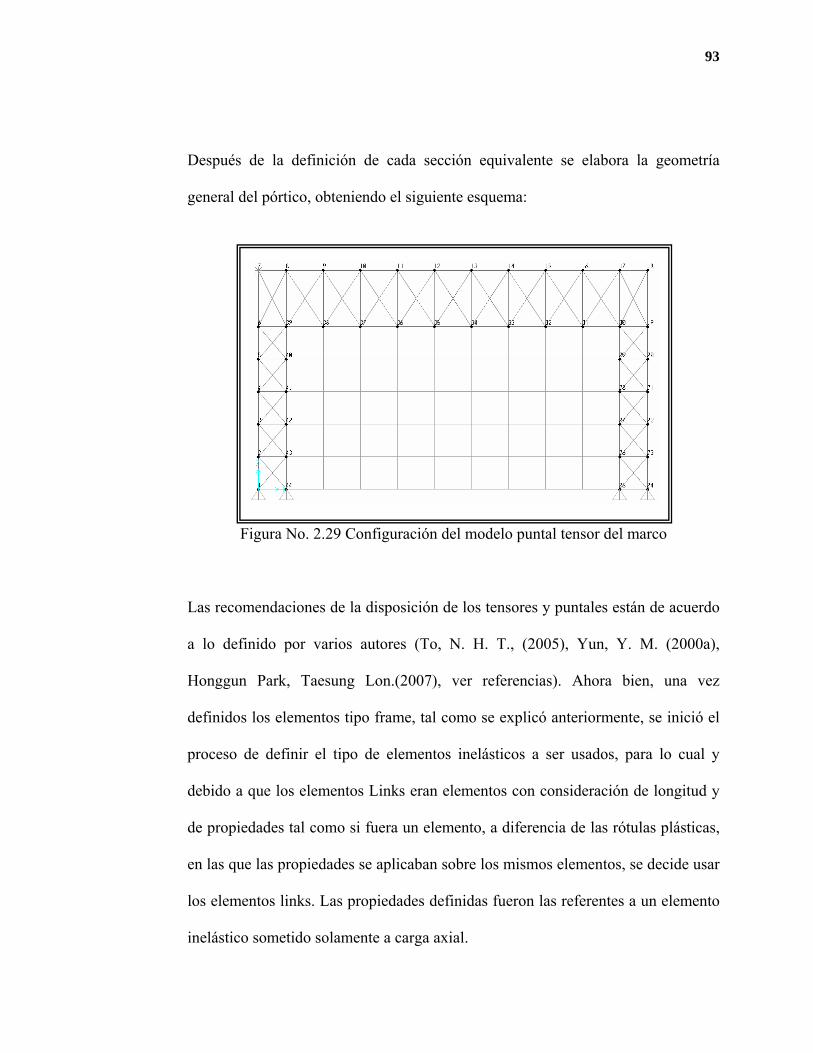
93
Después de la definición de cada sección equivalente se elabora la geometría
general del pórtico, obteniendo el siguiente esquema:
Figura No. 2.29 Configuración del modelo puntal tensor del marco
Las recomendaciones de la disposición de los tensores y puntales están de acuerdo
a lo definido por varios autores (To, N. H. T., (2005), Yun, Y. M. (2000a),
Honggun Park, Taesung Lon.(2007), ver referencias). Ahora bien, una vez
definidos los elementos tipo frame, tal como se explicó anteriormente, se inició el
proceso de definir el tipo de elementos inelásticos a ser usados, para lo cual y
debido a que los elementos Links eran elementos con consideración de longitud y
de propiedades tal como si fuera un elemento, a diferencia de las rótulas plásticas,
en las que las propiedades se aplicaban sobre los mismos elementos, se decide usar
los elementos links. Las propiedades definidas fueron las referentes a un elemento
inelástico sometido solamente a carga axial.
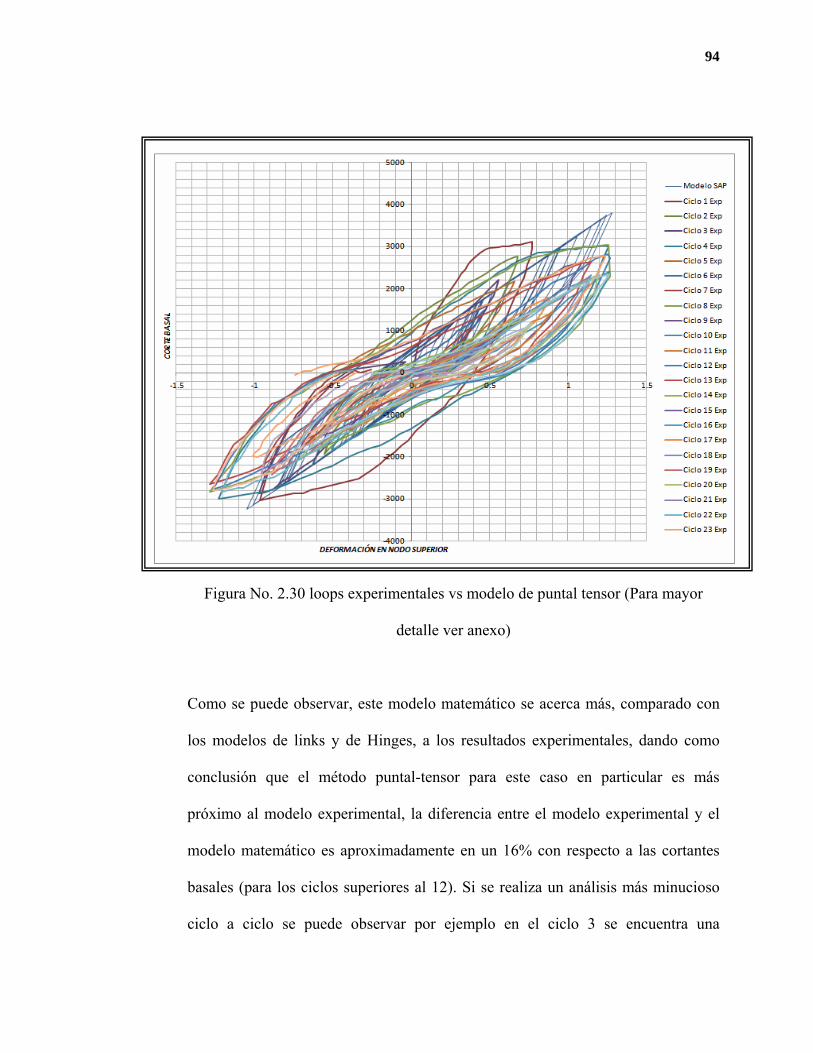
94
Figura No. 2.30 loops experimentales vs modelo de puntal tensor (Para mayor
detalle ver anexo)
Como se puede observar, este modelo matemático se acerca más, comparado con
los modelos de links y de Hinges, a los resultados experimentales, dando como
conclusión que el método puntal-tensor para este caso en particular es más
próximo al modelo experimental, la diferencia entre el modelo experimental y el
modelo matemático es aproximadamente en un 16% con respecto a las cortantes
basales (para los ciclos superiores al 12). Si se realiza un análisis más minucioso
ciclo a ciclo se puede observar por ejemplo en el ciclo 3 se encuentra una

95
geometría del modelo que se asemeja en forma a la del modelo experimental
aunque siguen existiendo diferencias sobretodo en el corte basal, para estos
primeros ciclos (1 al 12) el corte basal del modelo matemático es menor (del orden
del 20%) al caso experimental.
Figura No. 2.31 Loop ciclo experimental vs ciclo modelo puntal tensor
2.1.4 Propuesta modelo hibrido puntal tensor
Uno de los aspectos más observados durante el análisis es el tiempo requerido del
proceso computacional. Ya que para este modelo en particular y aplicando
solamente la metodología puntal tensor se tuvo tiempos de análisis para la función
de desplazamientos controlados de aproximadamente 9 horas, lo cual se convierte
en un factor muy determinante cuando se trabaja con modelos de mayor
complejidad.
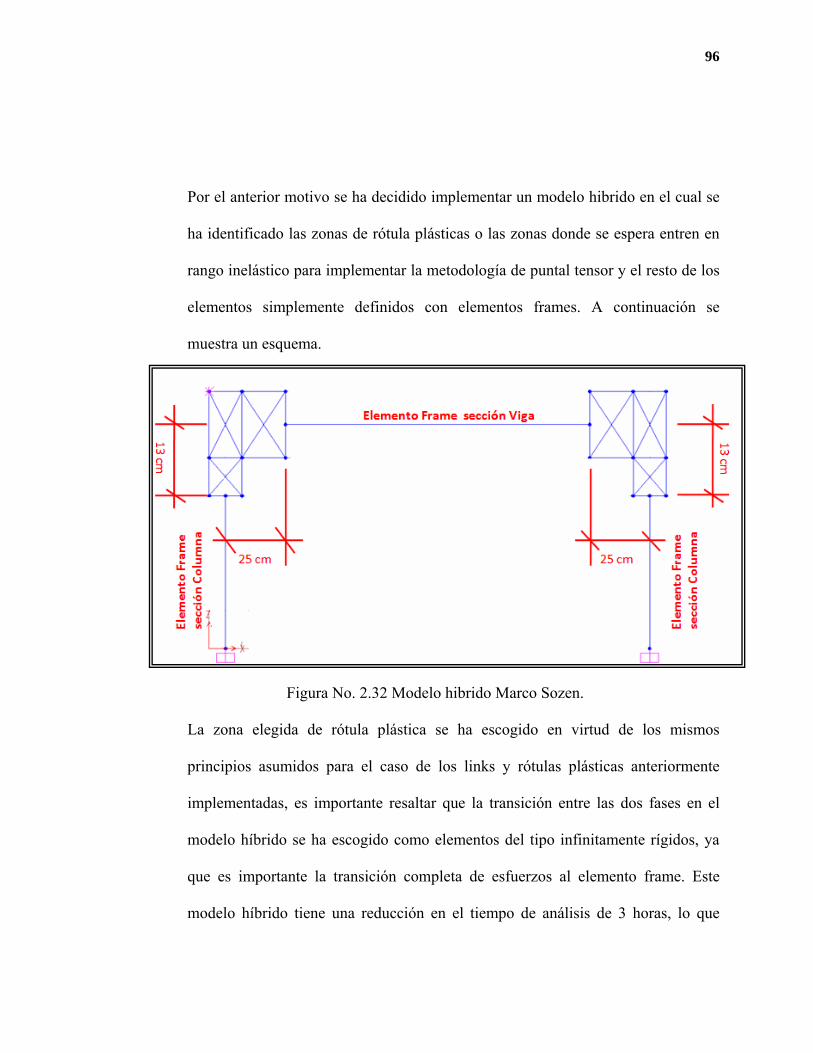
96
Por el anterior motivo se ha decidido implementar un modelo hibrido en el cual se
ha identificado las zonas de rótula plásticas o las zonas donde se espera entren en
rango inelástico para implementar la metodología de puntal tensor y el resto de los
elementos simplemente definidos con elementos frames. A continuación se
muestra un esquema.
Figura No. 2.32 Modelo hibrido Marco Sozen.
La zona elegida de rótula plástica se ha escogido en virtud de los mismos
principios asumidos para el caso de los links y rótulas plásticas anteriormente
implementadas, es importante resaltar que la transición entre las dos fases en el
modelo híbrido se ha escogido como elementos del tipo infinitamente rígidos, ya
que es importante la transición completa de esfuerzos al elemento frame. Este
modelo híbrido tiene una reducción en el tiempo de análisis de 3 horas, lo que
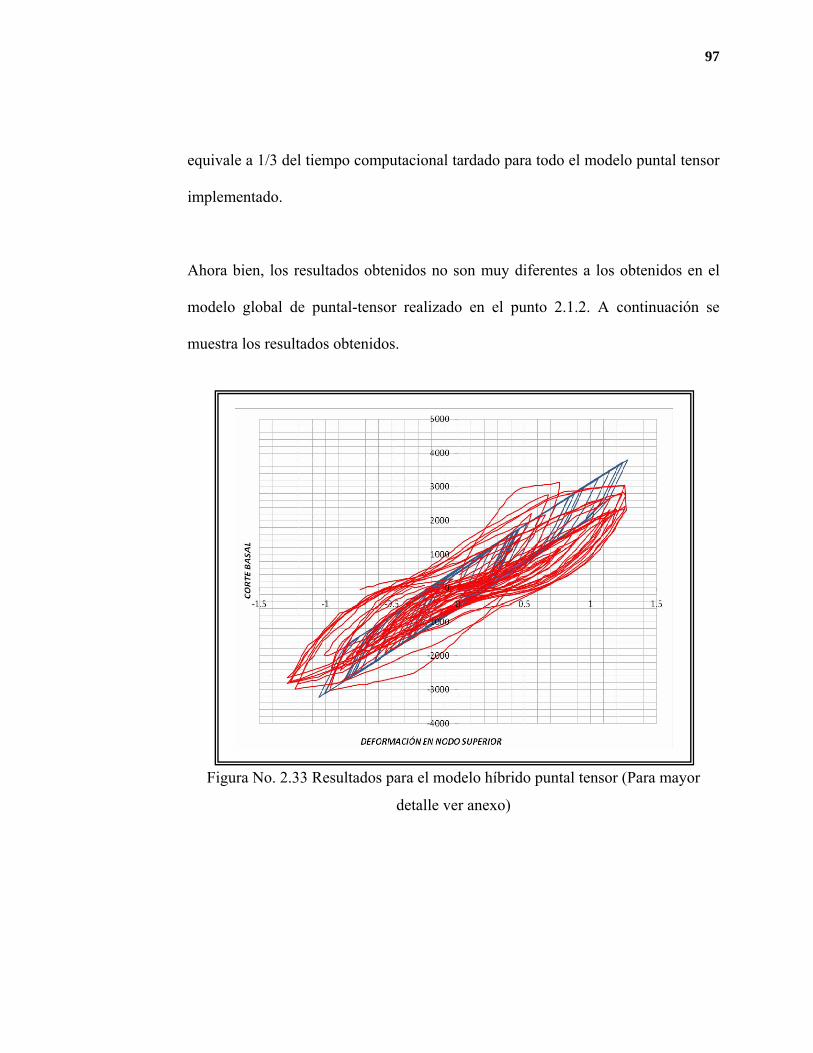
97
equivale a 1/3 del tiempo computacional tardado para todo el modelo puntal tensor
implementado.
Ahora bien, los resultados obtenidos no son muy diferentes a los obtenidos en el
modelo global de puntal-tensor realizado en el punto 2.1.2. A continuación se
muestra los resultados obtenidos.
Figura No. 2.33 Resultados para el modelo híbrido puntal tensor (Para mayor
detalle ver anexo)
98
2.2 Análisis de los problemas encontrados en la
implementación del modelo del marco de Sozen y Gulkan .
• El uso de rótulas plásticas en el software SAP 2000, ocasiona que el modelo
estructural esté por debajo del experimental en aproximadamente 10%.
• El intervalo de puntos en la integración produce que la curva histerética tenga
una rigidez negativa al final de la curva, lo que es una respuesta falsa y se debe a la
falta de puntos cercanos en esa zona final.
• Cuando se usan rótulas plásticas y se cambia el tipo de modelo usado, de
Kinematic a Takeda, la respuesta histerética no sufrió cambios. Esto no
corresponde a lo esperado, igualmente sucedió con un análisis de pushover donde
la respuesta no sufrió ningún tipo de cambio.
• Otro parámetro evaluado es el comportamiento bajo el parámetro momento-
curvatura, para lo cual se definieron las gráficas de momento-curvatura de las
vigas y las columnas. Se observó que en SAP2000 es indistinto para este caso en
definir la sección transversal como confinada o no confinada, si se desea observar
el comportamiento inelástico del sistema se debe incluir esta variación dentro de la
definición de las rótulas plásticas.
• Al igual que en el caso del uso de rótulas plásticas se define como histéresis el
modelo Takeda. Para lo cual se definen la curva de momento curvatura, sin
embargo se encontraron problemas de convergencias cuando las rotaciones son del
orden de 10-8, así mismo la gráfica de momento rotación no presenta los últimos
99
puntos de la falla ya que se demostró que el modelo presenta divergencias cuando
se expresa todo el comportamiento de la función momento curvatura, incluyendo
los puntos cercanos a cero en las ordenadas.
• Otro problema encontrado es la imposibilidad de usar una historia de
desplazamientos controlada por lo que es necesario hacer una evaluación para
introducir una historia de fuerzas controladas, esta equivalencia produce de cierta
forma una inexactitud, pero que sin embargo sigue comportándose mejor que para
el caso de rótulas plásticas.
• El modelo de links resulta con desplazamientos mayores a los observados
experimentalmente, aproximadamente del 33%. Lo que sucede es que el gran
problema de los links es que son elementos plásticos muy localizados y esto hace
que la respuesta así lo sea, por lo que problemas de compatibilidad de
deformaciones y esfuerzos en los puntos de contacto entre el elemento frame y el
elemento link.
• El gran problema encontrado en el modelo de puntal-tensor es el tiempo que se
demora el modelo en dar resultados, se encontró valores promedio de 9 horas para
modelos simples como pórticos planos y vigas en voladizo planas, es más lento,
debido a la cantidad de elementos que se necesitan para el análisis.
• Por otro lado, el modelo híbrido implementado reduce el tiempo computacional
en aproximadamente la tercera parte y el resultado obtenido es el mismo que el
obtenido para el caso de implementación del modelo puntal-tensor totalmente.

100
3. VIGA EN VOLADIZO DE BERTERO, POPOV Y WANG (1974)
3.1 Evaluación del modelo matemático usando metodologías
tradicionales en SAP2000 V. 11. (Modelo S1)
Como un reporte de investigaciones de la “National Science Foundation” Vitelmo
Bertero, Egor P. Popov y Tsan Y. Wang, estudiaron el comportamiento histerético
de elementos de hormigón armado sometidos a flexión con diferentes refuerzos a
corte.
El ensayo original constaba de 2 vigas de 78 in de largo de 15x29 in de sección
transversal y ambas reforzadas arriba y abajo con 6 varillas # 9 y con dos
diferentes refuerzos a corte. En la denominada Viga 33 (Ver figura 3.1) el refuerzo
transversal consistía en doble estribo los cuales eran capaces de ofrecer buen
soporte lateral a todas las barras longitudinales y estribos adicionales en el área
crítica.
Para este trabajo de investigación se considerará la Viga 33 como caso de estudio.
A continuación se presenta un esquema de la probeta.

101
Figura No. 3.1 Esquema viga 33
El ensayo fue realizado con una historia de cargas para un total de 28 ciclos.
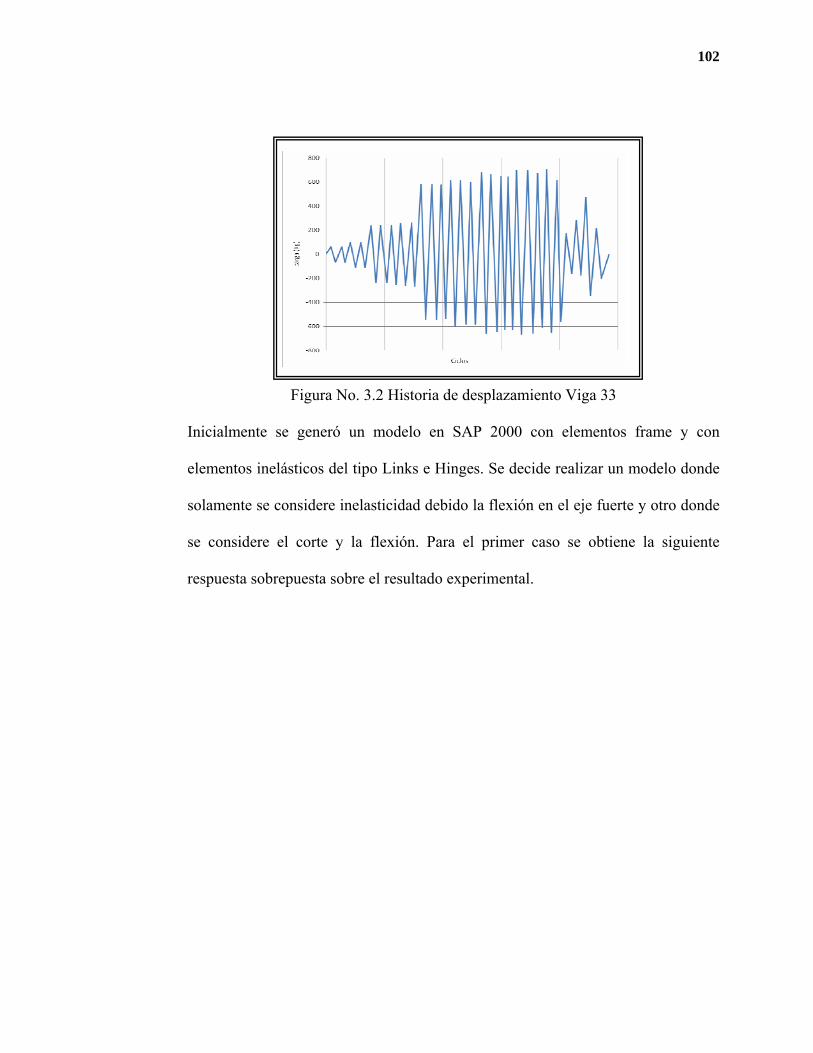
102
Figura No. 3.2 Historia de desplazamiento Viga 33
Inicialmente se generó un modelo en SAP 2000 con elementos frame y con
elementos inelásticos del tipo Links e Hinges. Se decide realizar un modelo donde
solamente se considere inelasticidad debido la flexión en el eje fuerte y otro donde
se considere el corte y la flexión. Para el primer caso se obtiene la siguiente
respuesta sobrepuesta sobre el resultado experimental.

103
Figura No. 3.3 Esquema respuesta para el modelo SAP usando hinges.
Se observa como el resultado del primer modelo no es capaz de representar
fielmente los últimos ciclos y es debido al comportamiento del corte dentro de las
cargas y descargas. Se observa que los primeros ciclos tiene diferencias de
aproximadamente 40%, pero a partir faltando 5 ciclos aproximados esta diferencia
comienza a aumentar hasta alcanzar más del 150%, lo que implica que el modelo
implementado no es capaz de representar los últimos ciclos del modelo
experimenta. La razón principal de estos errores es el efecto de corte en el
comportamiento inelástico del modelo, el cual no es posible implementar de
manera eficiente en SAP2000.
104
Adicionalmente se puede observar como los primeros ciclos concuerdan
claramente con la curva experimental aunque se observa una tendencia a aumentar
la curva histerética de manera pronunciada.
3.2 Evaluación del modelo matemático usando el método del
puntal-tensor. (Modelo S2)
Para el modelamiento de la viga Popov y Wang usando el método del puntal tensor
fue necesario determinar las dimensiones equivalentes para los elementos
diagonales y longitudinales. N.H.T. To y J.M. Ingham Usan como estrategia
dividir la estructuras en diferentes regiones. Hay dos tipos de regiones, “B” y “D”,
B (Bernoulli), son las denominadas partes donde se asume la teoría convencional
de la flexión y la D (o Disturbed), donde la distribución de esfuerzos deformación
están significativamente afectadas por discontinuidades en la geometría física.
Adicionalmente Honggun Park y Taesung Eom, diferencian claramente las áreas
equivalentes para las zonas longitudinales y diagonales de los elementos vigas y
columnas, se realizan los siguientes cálculos para cada zona:
Junto con esta definición se debe generar la geometría del puntal tensor, para lo
que se siguen las geometrías para este tipo de elementos vigas de hormigón
armado en voladizo (Cyclic strut-and-tie modeling of reinforced concrete
structures, N.H.T. To, J.M. Ingham and B.J. Davidson). Igual que en los casos
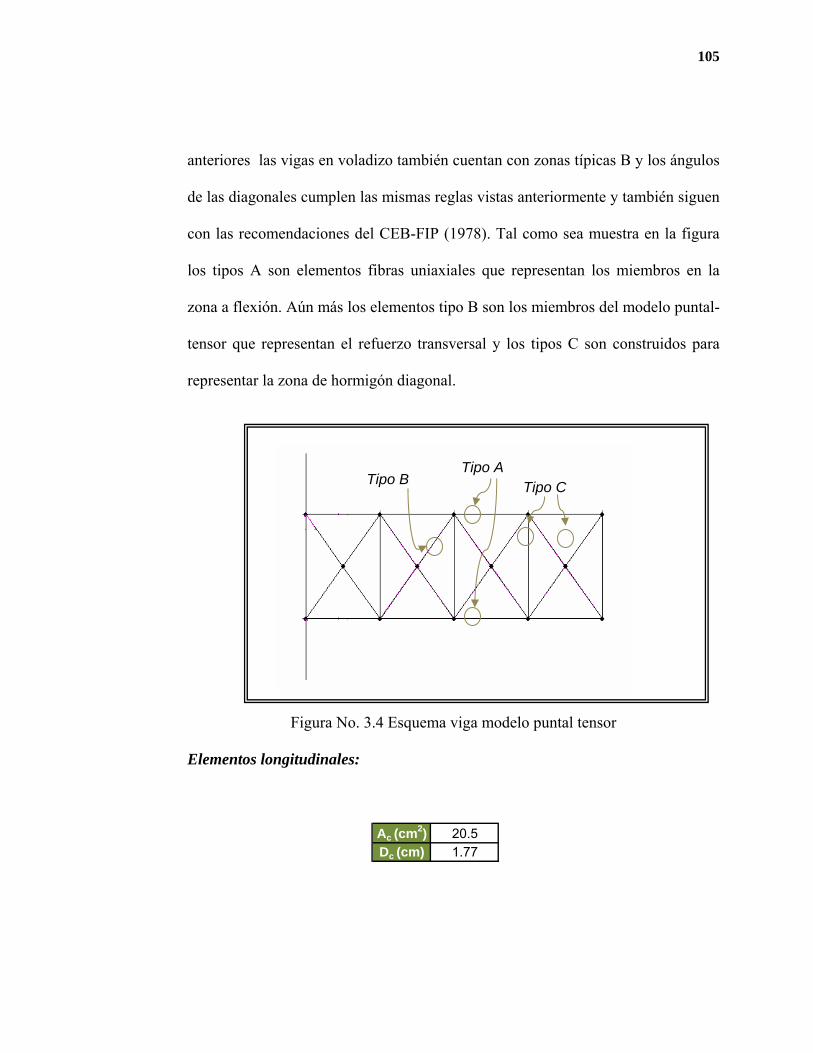
105
anteriores las vigas en voladizo también cuentan con zonas típicas B y los ángulos
de las diagonales cumplen las mismas reglas vistas anteriormente y también siguen
con las recomendaciones del CEB-FIP (1978). Tal como sea muestra en la figura
los tipos A son elementos fibras uniaxiales que representan los miembros en la
zona a flexión. Aún más los elementos tipo B son los miembros del modelo puntal-
tensor que representan el refuerzo transversal y los tipos C son construidos para
representar la zona de hormigón diagonal.
Figura No. 3.4 Esquema viga modelo puntal tensor
Elementos longitudinales:
Ac (cm2) 20.5Dc (cm) 1.77
Tipo B Tipo A
Tipo C
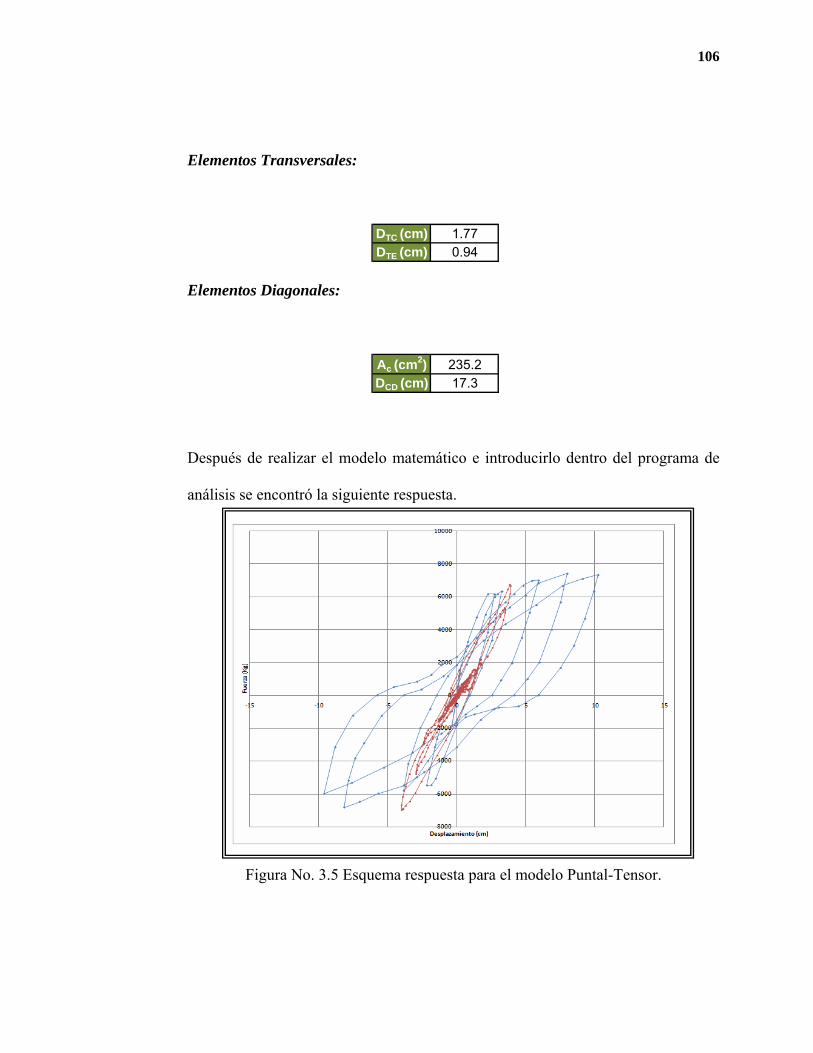
106
Elementos Transversales:
DTC (cm) 1.77DTE (cm) 0.94
Elementos Diagonales:
Ac (cm2) 235.2DCD (cm) 17.3
Después de realizar el modelo matemático e introducirlo dentro del programa de
análisis se encontró la siguiente respuesta.
Figura No. 3.5 Esquema respuesta para el modelo Puntal-Tensor.
107
Se observa que la respuesta con el modelo Puntal Tensor se aproxima un poco más
a la respuesta experimental la diferencia en los ciclos iníciales se reduce a
aproximadamente al 20%, sin embargo cabe destacar que las últimas curvas no se
obtuvieron debido a que el modelo igualmente diverge en valores muy altos de la
carga externa aplicada.
3.3 Propuesta modelo hibrido puntal tensor
Así como en el caso del marco de Sozen el gran inconveniente encontrado es el
tiempo necesario computacional para lograr el análisis completo de esta estructura
sencilla, ya que para la viga en voladiza de Popov requirió aproximadamente de 3
horas lo cual es mucho para un sistema estructural tan sencillo.
Por este motivo se ha decidido implementar nuevamente un modelo híbrido entre
la metodología puntal-tensor y elementos frames. A continuación se muestre un
esquema simple del modelo híbrido implementado para este caso.
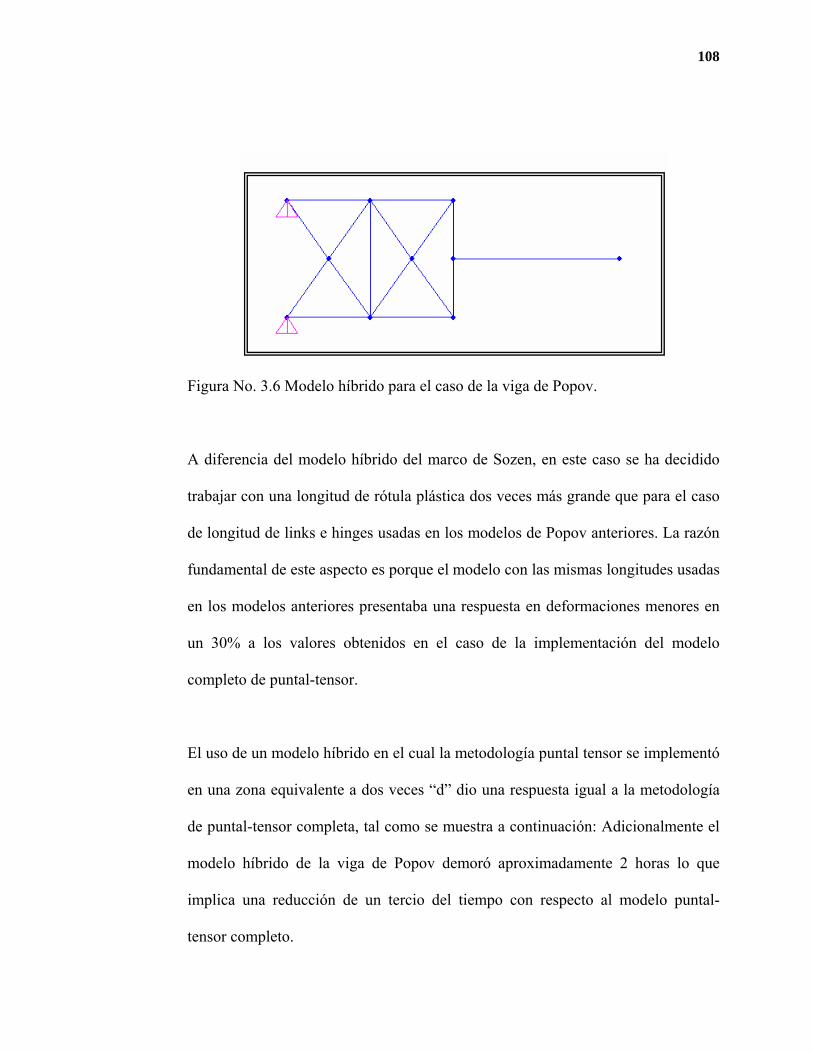
108
Figura No. 3.6 Modelo híbrido para el caso de la viga de Popov.
A diferencia del modelo híbrido del marco de Sozen, en este caso se ha decidido
trabajar con una longitud de rótula plástica dos veces más grande que para el caso
de longitud de links e hinges usadas en los modelos de Popov anteriores. La razón
fundamental de este aspecto es porque el modelo con las mismas longitudes usadas
en los modelos anteriores presentaba una respuesta en deformaciones menores en
un 30% a los valores obtenidos en el caso de la implementación del modelo
completo de puntal-tensor.
El uso de un modelo híbrido en el cual la metodología puntal tensor se implementó
en una zona equivalente a dos veces “d” dio una respuesta igual a la metodología
de puntal-tensor completa, tal como se muestra a continuación: Adicionalmente el
modelo híbrido de la viga de Popov demoró aproximadamente 2 horas lo que
implica una reducción de un tercio del tiempo con respecto al modelo puntal-
tensor completo.
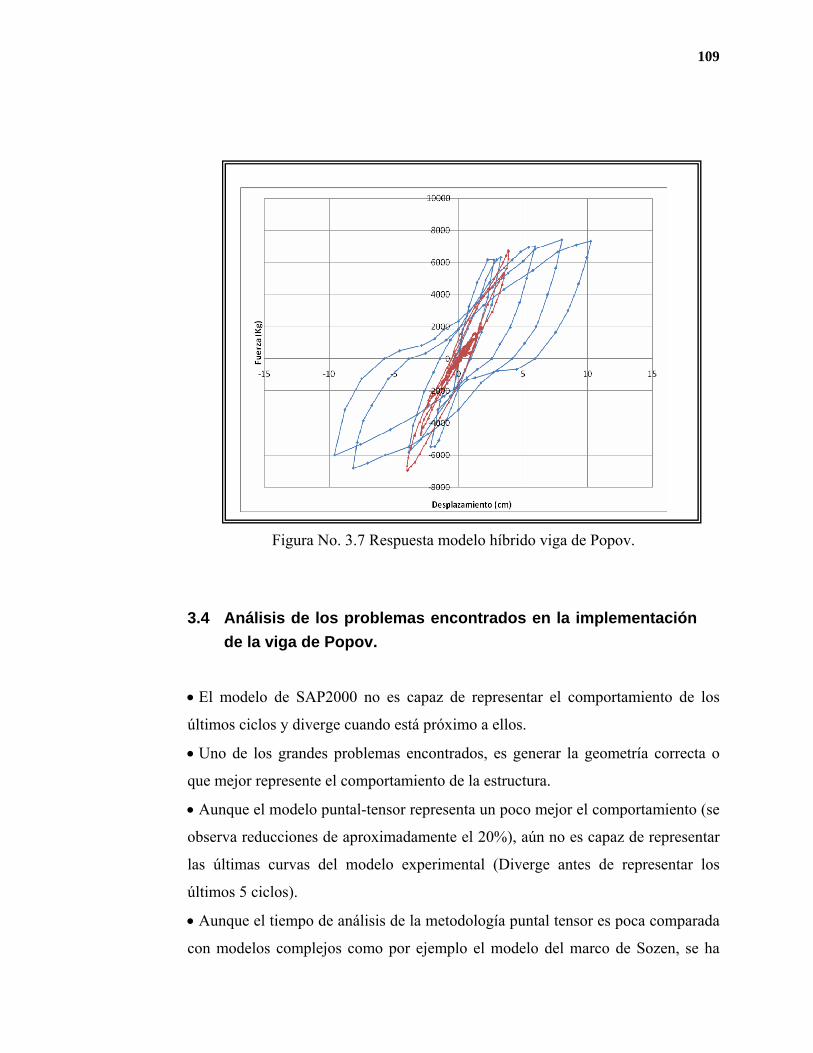
109
Figura No. 3.7 Respuesta modelo híbrido viga de Popov.
3.4 Análisis de los problemas encontrados en la implementación de la viga de Popov.
• El modelo de SAP2000 no es capaz de representar el comportamiento de los
últimos ciclos y diverge cuando está próximo a ellos.
• Uno de los grandes problemas encontrados, es generar la geometría correcta o
que mejor represente el comportamiento de la estructura.
• Aunque el modelo puntal-tensor representa un poco mejor el comportamiento (se
observa reducciones de aproximadamente el 20%), aún no es capaz de representar
las últimas curvas del modelo experimental (Diverge antes de representar los
últimos 5 ciclos).
• Aunque el tiempo de análisis de la metodología puntal tensor es poca comparada
con modelos complejos como por ejemplo el modelo del marco de Sozen, se ha

110
logrado su tiempo de implementación en un tercio usando una alternativa híbrida
de análisis.
4. ESTUDIO EN SIMULADOR SÍSMICO DE UN MARCO DE
HORMIGÓN ARMADO, P. HIDALGO Y R. W. CLOUGH 1974
Hasta el momento en esta investigación se han analizado y comparado ensayos
experimentales sencillos, pero el comportamiento real de estructuras sometidas a sismo
dista mucho de efectos seudoestáticos, por esta razón se ha decidido trabajar con el
experimento realizado por Hidalgo y Clough en 1974, ya que fue un experimento que
cuenta con una gran cantidad de sismos y de análisis que requieren metodologías
dinámicas más detalladas.
La idea inicial de este estudio comprendía un programa de investigación sobre el estudio
del comportamiento de estructuras de hormigón armado bajo condiciones de carga
sísmica, todos usando una mesa vibratoria de 20 pies por 20 pies localizada en la
Universidad de California. El objetivo principal de este programa fue obtener
información acerca de estas estructuras, vibrando en amplitudes suficientes como para
causar deformaciones inelásticas.
Con respecto al estudio, fueron tomadas varias decisiones, la primera fue la de usar una
simple pero completa estructura para reproducir una situación práctica. Se decidió que

111
predominaran las condiciones flexurales, con baja influencia de esfuerzos de corte y de
carga axial. Aunque se consideraron cuatro diferentes demandas sísmicas, para esta
evaluación posterior se decidió usar la denominada W6, referente al sismo TAFT S69E
(Ver figura 4.1).
Fig. 4.1 Sismo TAFT, N69W Comp., July 1952
En la figura No. 4.2 se puede observar un esquema general de la estructura evaluada. La
estructura para el test, fue obtenida reduciendo el tamaño real aproximadamente 30%.
Mucho más, la distancia entre elementos fue hecha lo más corta posible sin afectar la
acción de las vigas T en el diafragma de piso. Las propiedades de las secciones fueron
analizadas en la base de las 3 hipótesis de rigidez:
a. Área de la sección transformada, Que considera el efecto del refuerzo y asume el
comportamiento del hormigón lineal en tensión y compresión con un módulo de
elasticidad, Ec.
112
b. Sección Bruta, no considera los efectos del acero pero asume la contribución del
concreto en tensión y compresión como se indica en a.
c. Sección fisurada, la cual toma en cuenta el efecto del acero de refuerzo pero no
considera la contribución del hormigón donde está sujeta a esfuerzos a tensión.
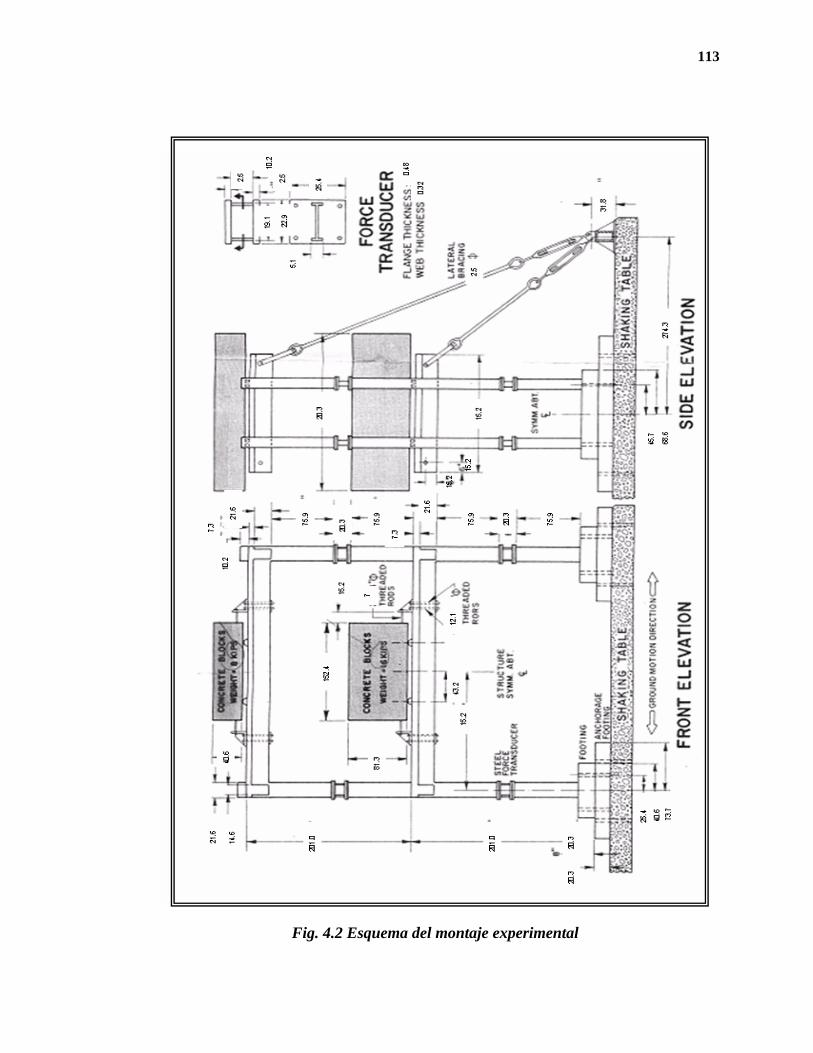
113
Fig. 4.2 Esquema del montaje experimental
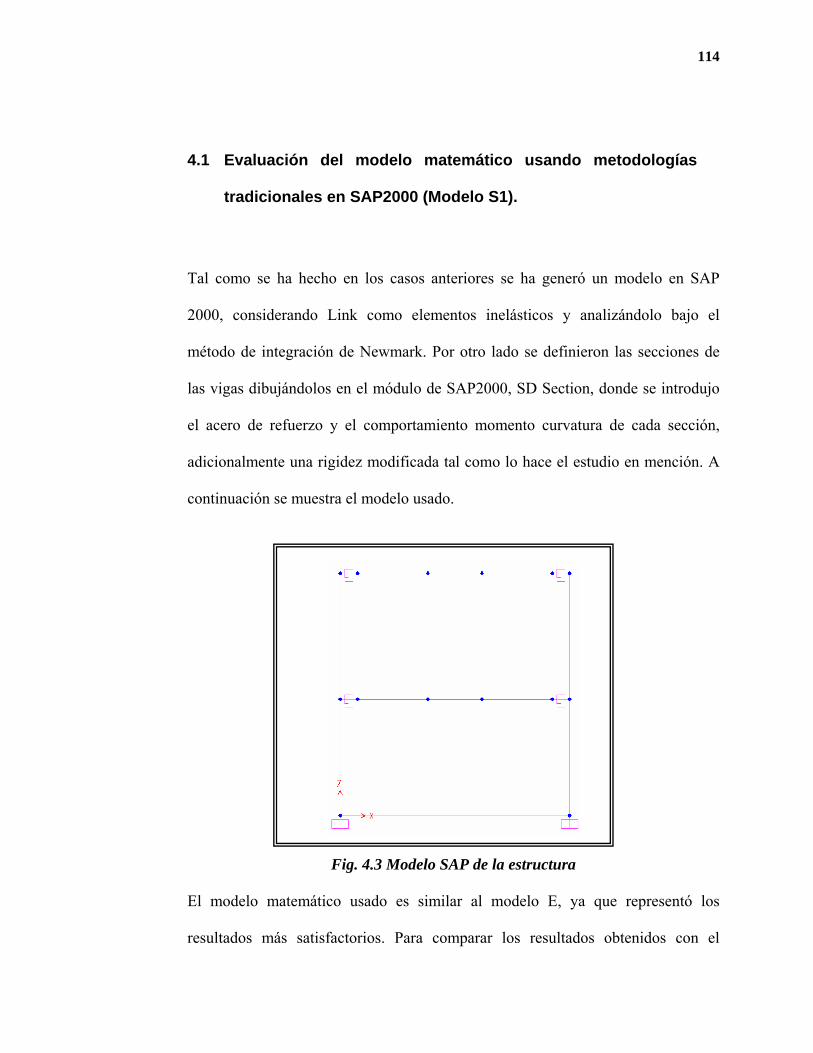
114
4.1 Evaluación del modelo matemático usando metodologías
tradicionales en SAP2000 (Modelo S1).
Tal como se ha hecho en los casos anteriores se ha generó un modelo en SAP
2000, considerando Link como elementos inelásticos y analizándolo bajo el
método de integración de Newmark. Por otro lado se definieron las secciones de
las vigas dibujándolos en el módulo de SAP2000, SD Section, donde se introdujo
el acero de refuerzo y el comportamiento momento curvatura de cada sección,
adicionalmente una rigidez modificada tal como lo hace el estudio en mención. A
continuación se muestra el modelo usado.
Fig. 4.3 Modelo SAP de la estructura
El modelo matemático usado es similar al modelo E, ya que representó los
resultados más satisfactorios. Para comparar los resultados obtenidos con el

115
ensayo, se decidió usar las variables de desplazamiento en el nivel superior,
desplazamiento en el nivel intermedio y el de reacciones en las columnas, ya que
representan de mejor manera el comportamiento global del modelo. A
continuación se muestran los resultados obtenidos.
Fig. 4.4 .Respuesta desplazamiento de cubierta vs tiempo
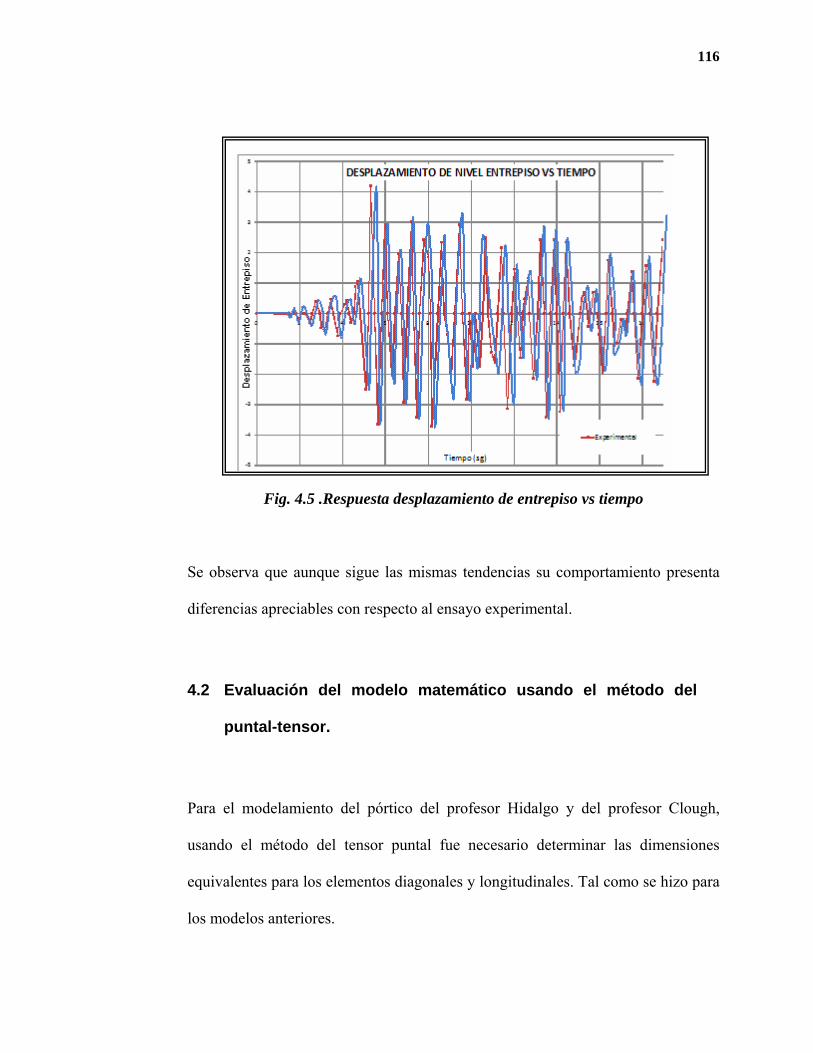
116
Fig. 4.5 .Respuesta desplazamiento de entrepiso vs tiempo
Se observa que aunque sigue las mismas tendencias su comportamiento presenta
diferencias apreciables con respecto al ensayo experimental.
4.2 Evaluación del modelo matemático usando el método del
puntal-tensor.
Para el modelamiento del pórtico del profesor Hidalgo y del profesor Clough,
usando el método del tensor puntal fue necesario determinar las dimensiones
equivalentes para los elementos diagonales y longitudinales. Tal como se hizo para
los modelos anteriores.

117
Figura No. 4.6 Esquema pórtico modelo puntal tensor
Elementos longitudinales en columnas:
Ac (cm2) 51.2Dc (cm) 8.07
Elementos Transversales en columnas:
DTC (cm) 0.08DTE (cm) 0.09
Elementos Diagonales en columnas:
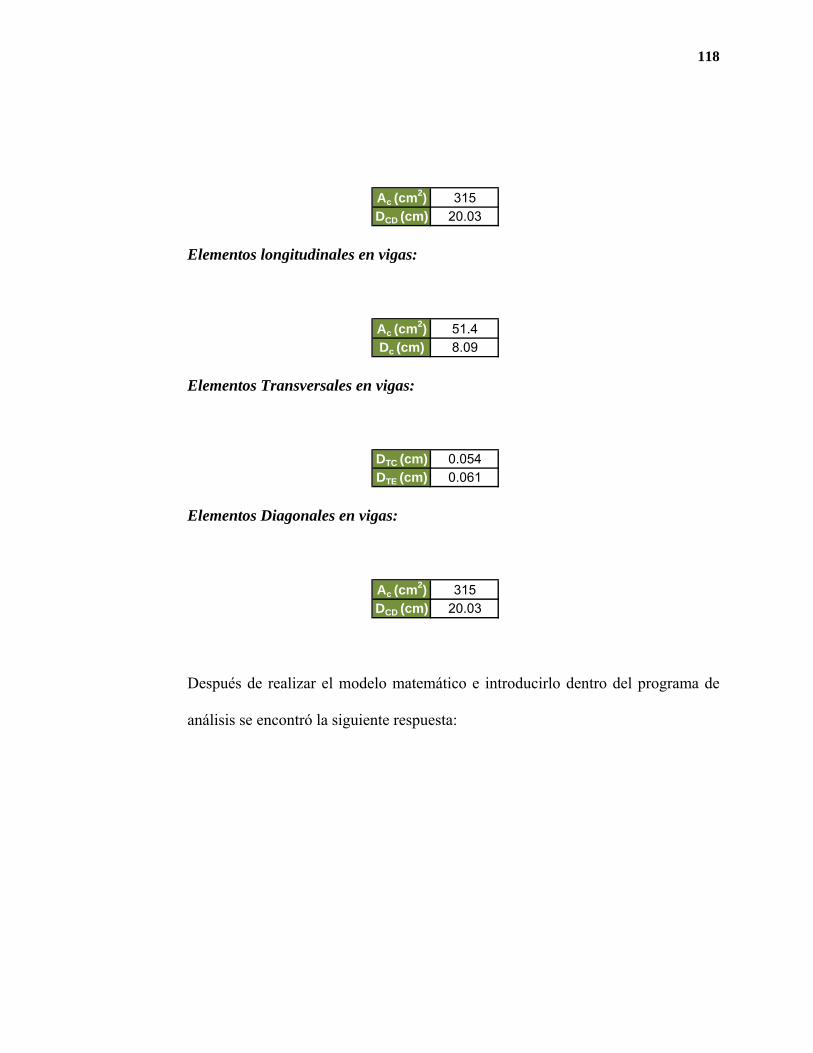
118
Ac (cm2) 315DCD (cm) 20.03
Elementos longitudinales en vigas:
Ac (cm2) 51.4Dc (cm) 8.09
Elementos Transversales en vigas:
DTC (cm) 0.054DTE (cm) 0.061
Elementos Diagonales en vigas:
Ac (cm2) 315DCD (cm) 20.03
Después de realizar el modelo matemático e introducirlo dentro del programa de
análisis se encontró la siguiente respuesta:
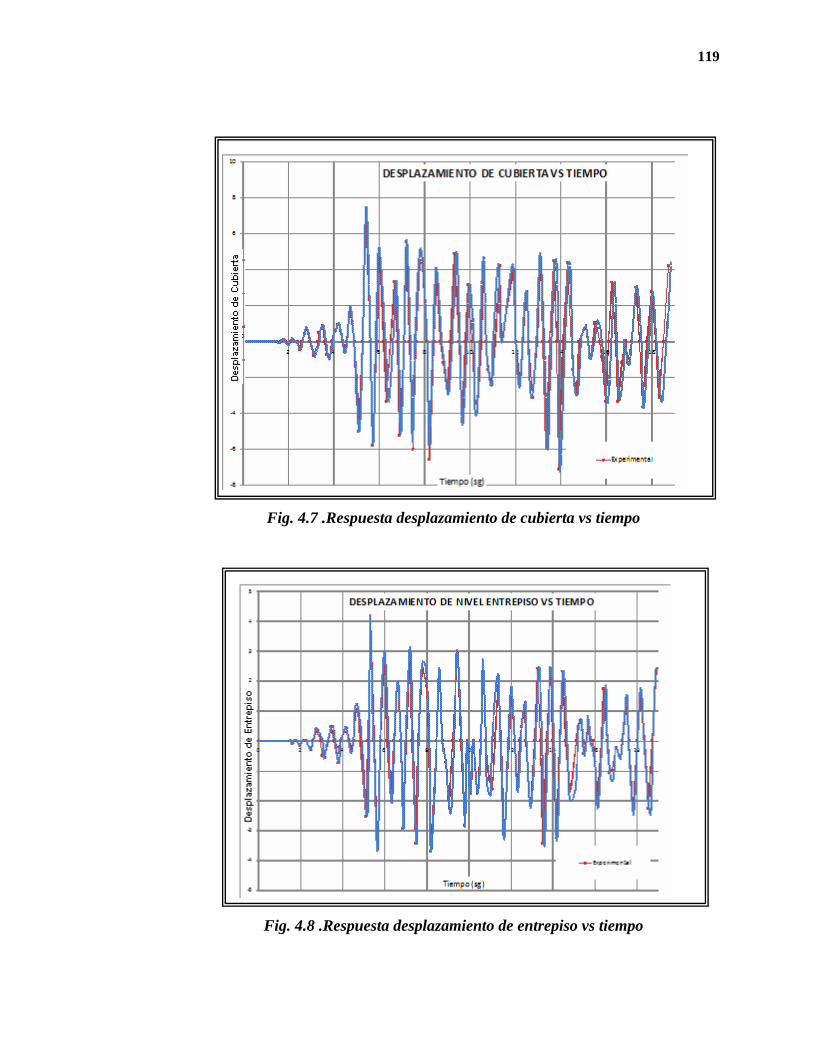
119
Fig. 4.7 .Respuesta desplazamiento de cubierta vs tiempo
Fig. 4.8 .Respuesta desplazamiento de entrepiso vs tiempo
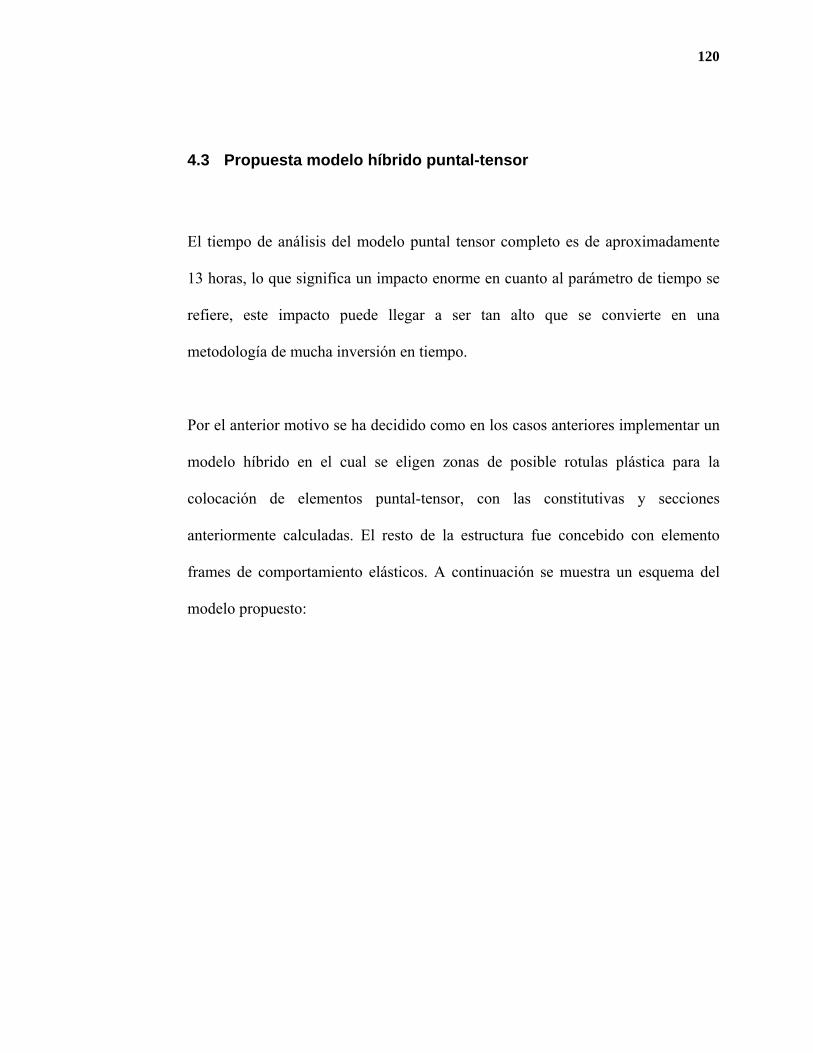
120
4.3 Propuesta modelo híbrido puntal-tensor
El tiempo de análisis del modelo puntal tensor completo es de aproximadamente
13 horas, lo que significa un impacto enorme en cuanto al parámetro de tiempo se
refiere, este impacto puede llegar a ser tan alto que se convierte en una
metodología de mucha inversión en tiempo.
Por el anterior motivo se ha decidido como en los casos anteriores implementar un
modelo híbrido en el cual se eligen zonas de posible rotulas plástica para la
colocación de elementos puntal-tensor, con las constitutivas y secciones
anteriormente calculadas. El resto de la estructura fue concebido con elemento
frames de comportamiento elásticos. A continuación se muestra un esquema del
modelo propuesto:
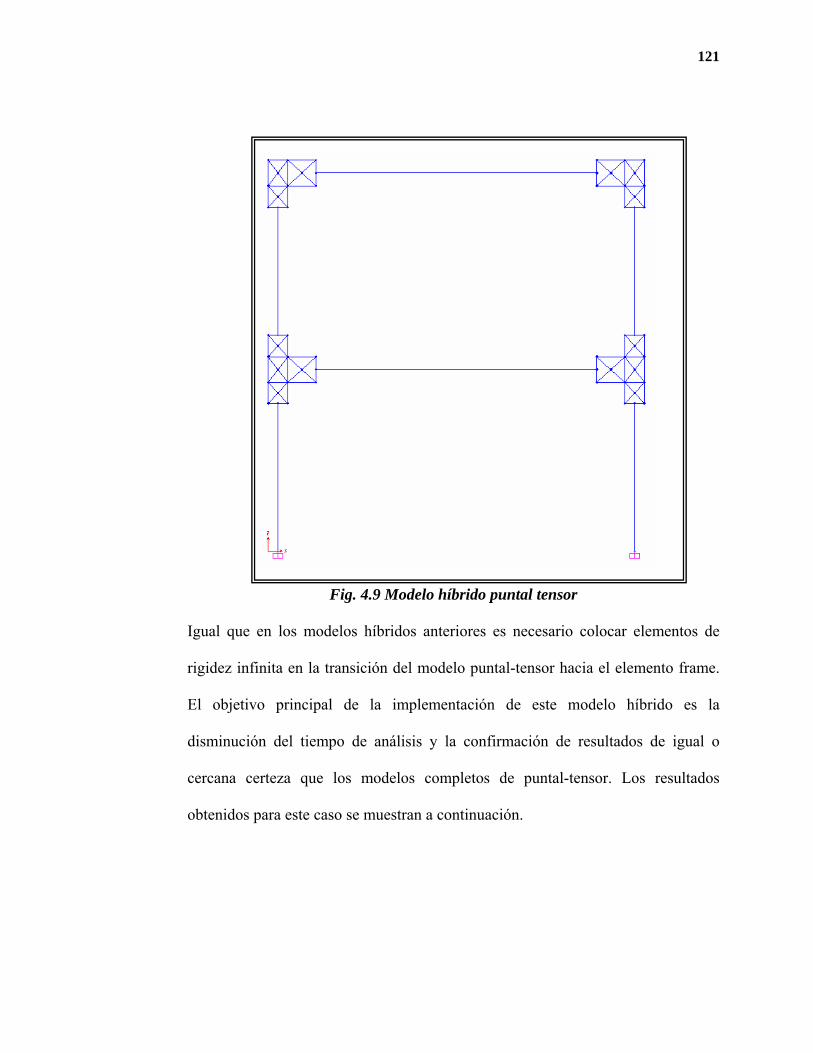
121
Fig. 4.9 Modelo híbrido puntal tensor
Igual que en los modelos híbridos anteriores es necesario colocar elementos de
rigidez infinita en la transición del modelo puntal-tensor hacia el elemento frame.
El objetivo principal de la implementación de este modelo híbrido es la
disminución del tiempo de análisis y la confirmación de resultados de igual o
cercana certeza que los modelos completos de puntal-tensor. Los resultados
obtenidos para este caso se muestran a continuación.
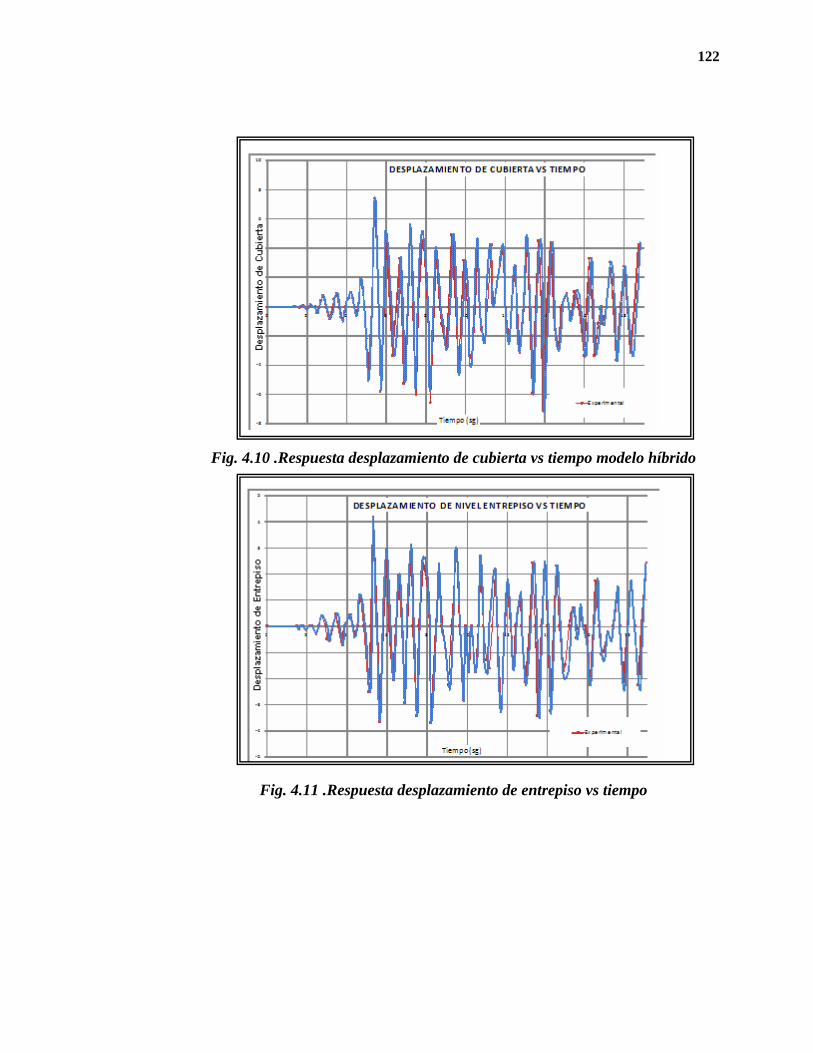
122
Fig. 4.10 .Respuesta desplazamiento de cubierta vs tiempo modelo híbrido
Fig. 4.11 .Respuesta desplazamiento de entrepiso vs tiempo
123
4.4 Análisis de los problemas encontrados en la implementación
del pórtico de Hidalgo-Clough
• Se ha implementado dos modelos matemáticos en SAP2000, usando diferentes
elementos inelásticos con el fin de obtener la respuesta de la estructura estudiada a
la excitación definida por el ensayo experimental. Se encontró, como en los casos
anteriores, que los elementos Links son menos precisos al compararlos contra el
modelo experimental (50%), posteriormente y cercanos al 10% se obtuvo la
respuesta usando un modelo bajo el modelo Puntal Tensor.
124
CONCLUSIONES
• Todas las respuestas de los modelos usando la metodología puntal-tensor, estuvieron
satisfactoriamente, con porcentajes cercanos al 40%, de acuerdo con los modelos
experimentales, a diferencia de las metodologías usuales de análisis inelásticos.
• Uno de los grandes problemas que existen en los modelos matemáticos
implementados han sido las leyes constitutivas usadas. El Programa SAP no es capaz
de implementar de forma correcta las constitutivas de tal forma que representen
correctamente los modelos experimentales. Sigue siendo imprescindible la
verificación de los modelos previos a su implementación
• Los modelos implementados en SAP con elementos inelásticos del tipo Links tienen
un mejor comportamiento que aquellos implementados con Hinges, debido a que la
focalización de comportamientos inelásticos mejoran la respuesta esperada. Más aún
los elementos definidos como Links, son elementos que se definen como tales, con
longitud y ubicación dentro del modelo, esto no sucede con las rótulas plásticas que
son definidas sobre los frame previamente establecidos dentro del modelo.
• Los resultados de los modelos estructurales implementados arrojaron que el uso de
rótulas plásticas en el Software Sap2000 ocasiona que el modelo estructural esté por
debajo del experimental, esta variación depende de cada caso en particular,

125
adicionalmente la respuesta histerética es del tipo bilineal para el caso del uso de
modelos de rótulas plásticas.
• El modelo de links resulta con desplazamientos mayores a los observados
experimentalmente. Lo que sucede es que los links es son elementos plásticos con
una longitud definida y esto hace que haya incompatibilidades de deformaciones en
las conexiones entre los frames y los links.
• Cuando se trabajaron los modelos con rótulas plásticas o Links, es de suma
importancia definir las longitudes de las zonas plásticas, esta debe ser
aproximadamente igual a la altura de la sección para que la pendiente de la rigidez de
postfluencia en el gráfico fuerza-deformación sea consistente con los valores
obtenidos experimentalmente usando la relación momento-curvatura teórica.
• Como se observó en los modelos experimentales, la degradación de rigidez sigue
siendo un fenómeno que ocurre en los elementos de hormigón armado, por lo que es
fundamental su consideración en cualquier tipo de modelo matemático que se quiera
implementar.
• Aunque el programa SAP es el más usado en la práctica actual, tiene problemas de
convergencia para los casos que se desea implementar análisis inelásticos, ya que
126
para una alta complejidad de los modelos el programa tiene un incremento de
procesamiento de los datos que resulta lento para la práctica profesional.
127
BIBLIOGRAFIA
ATC (1996), “Seismic Evaluation and Retrofit of Concrete Building”, ATC-40 Report,
Applied Technology Council, Redwood City, California.
ATC (2003), “Procedings of FEMA-Funded Workshop on communicating Earthquake
Risk”, ATC-58-1 Report, Applied Technology Council, Redwood City, California.
Bertero. V. V., Popov, E. P. and T. Y. Wang (1974), “Hysteretic Behavior of Reinforced
Concrete Flexural Members with Special Web Reinforcement”, EERC Report No
UCB/EERC-74/9, Universidad de California, Berkeley.
Bhide, S. and Collins, M. P. (1989). Tensión Influence on Shear Capacity of Members”
ACI Structural Journal, Vol. 86, No. 5, Septiembre-Octubre.
Bing Li, Cao Thanh Ngoc Tran. “Reinforced concrete beam analysis supplementing
concrete contribution in truss models”. Engineering of Structures. Mayo 2008.
Chopra, A. K. (2001), “Dynamics of Structures”, Prentience Hall.
Computers and Structures, Inc. (2003). “SAP2000: Static and Dynamic Finite Element
Analyisis of Structure Nonlinear”. Berkeley, California.
Erol Kalkan, Sashi K. Kunnath, “Assessment of current Nonlinear static procedures for
seimic evaluation of Buildings” Engineering Structures (2007).
Federal Emergency Management Agency (FEMA) (2000). “Prestandard and
Commentary for Seismic Rehabilitation of Building”. FEMA-356
128
Fenwick, R. C., Megget, L. M. and Wuu, P. (1996), Load Deflection Characteristic of
Plastic Hinges in Ductile Concrete Beams”. Proceeding of the Eleventh World
Conference on Earthquake, Acapulco, Paper No. 469.
Filippou, F. C. and A. Issa (1988). Nonlinear Analyisis of Reinforced Concrete Frames
under Cyclic Load Reversals”, EERC Report No. UCB/EERC-88/12. Universidad de
California. Berkeley.
Gulkan, P., and M.A Sozen (1974), “Inelastic Response of Reinforced Concrete
Structures to Earthquake Motion”, Journal, ACI, No. 12, Vol 71, pp 604-610.
Guo-Lin Wang, Shao-Ping Meng. “Modified Strut-and-Tie model for prestressed
concrete deep beams” Engineering Structures Mayo 2008.
Hidalgo P. Clough R.W., “earthquake simulator study of a reinforced concrete frame”,
Report No. EERC 74-13 Diciembre 1974.
Honggun Park, Taesung Eom . “Truss Model for Nonlinear Analysis of RC members
subject to cyclic loading”. (2007)
Ingham, J. M. (1995), “Seismic Performance of Bridge Knee Joint”, Doctoral
Dissertation, Department of Applied Mechanics and Engineering Sciences, University of
California at San Diego, La Jolla, California, 501p.
MacGregor, J. G. (1997), “Reinforced Concrete MEchanics and Design”, Tercera
edición, Prentice Hall, New Jersey, 799 pp.
129
NEHRP (1997). “ Guidelines and Commentary for the Seismic Rehabilitation of
Buildings”, FEMA – 273/274 Report, Federal Emergency Management Agency,
Washington, D.C.
Otani, S. (1981), “ Hysteresis Models of Reinforced Concrete for Earthquake Response
Analysis”, Journal of Faculty of Engineering, Universidad de Tokio, Vol. XXXVI, No.
2, Págs, 407-441.
Otani, S. (1980), “Nonlinear Dynamic Analysis of Reinforced Concrete Building
Structures”, Canadian Journal of Civil Engineering, Vol 7, Pág 333-344.
Pyke, R. M. (1980), “Nonlinear Models for Irregular Cyclic Loadings”, Journal of the
Geotechnical Engineering Division, ASCE, Vol 105, No. GT6, 1979, pp 715-726.
Discussion and Closure, Vol 106, No. GT11, pp 1277-1281.
Riddell, R. and N. M Newmark (1979), “Force Deformation Models for Non-linear
Analysis”, Journal of the Structural Division, ASCE, Vol, 105, ST12, pp. 2773-2778.
Saiidi M. and M.A. Sozen (1981), “ Simple Nonlinear Seismic Analysis of R/C
Structures”, Journal of the Structural Division. Proceedings of the American Society of
Civil Engineers (ASCE). Vol. 107, No. ST5
Salem, H. M., Maekawa, K. (2006), “Computer-aided analysis of reinforced concrete
using a refined nonlinear strut and tie model approach”, Journal of advanced Concrete
Technology, Vol, 4, No. 2, pp. 325-336.
The Mathworks, Inc (2001), “MATLAB: The language of technical computing version
7.0”
Tjhin, T. N., Kuchma, D. A. (2007), “Integrated analysis and design tool for the strut-
and-tie method”, Enguneering Structures, In Press, Concrete Proof, Available online. 30
March 2007.

130
To, N. H. T., (2005) “Nonlinear Structural Analysis using Strut-and-Tie Models”, Ph.D.
Thesis, Department of Civil Engineering and Environmental Engineering, University of
aucland.
To, N. H. T., Ingham, J. M. and Sritharan, S. (2001), “ Monotonic Nonlinear Analysis of
Reinforced Concrete Knee Joint using Strut-and-Tie Computer model”. Bulletin of New
Zealand Society for Earthquake Engineering, Vol. 32, No. 3, Septiembre, pp. 169-190.
To, N. H. T., Ingham. J. M. and Sritharan, S. (2007), “ Nonlinear Strut-and-Tie Analysis
for Concrete Frames, Part 2: Demonstration of Capabilities”, ASCE (Under review).
Young Mook Yun and Byung Hun Kim, “Two-Dimensional Grid Strut-Tie Model
Approach for Structural Concrete”.Journal Of Structural Engineering, ASCE / July
2008.
Yun, Y. M. (2000a), “ Nonlinear Strut-tie model approach for structural concrete”,
ACI Structural Journal, Vol. 97, No. 4, July/August, pp. 581-590.
Mander, J.B., M.J.N. Priestley, and R. Park 1984. “Theoretical Stress-Strain Model for Confined Concrete”. Journal of Structural Engineering. ASCE. 114(3). 1804-1826.

131
A N E X O
132
Anexo A: Procedimiento matemático de SAP ante un input de desplazamiento
Se ha demostrado que recuperar la aceleración a partir de los
desplazamientos es una operación numérica inestable, por este motivo en esta
investigación se propone la introducción directa de la historia de desplazamientos
controlados dentro del software SAP2000. Ahora bien, lo que hace SAP2000
internamente se explica brevemente a continuación.
Para un sistema de “Lumped-mass” el sistema de ecuaciones dinámicas de
equilibrio, en términos del desplazamiento desconocido de los nudos Us en la
superestructura y el desplazamiento absoluto Ub , en el lugar donde se le impone el
desplazamiento externo, se puede escribir.
Si se toma la ecuación de equilibrio correspondiente a la superestructura
solamente, con el valor de desplazamiento controlado absoluto, se puede escribir:
Aquí surge el gran inconveniente del amortiguamiento en la zona de
desplazamiento controlado. Estas fuerzas definidas para el amortiguamiento
normalmente no son tenidas en cuenta por tal motivo la anterior ecuación es escrita de la
siguiente manera:

133
Anexo B: (MARCO SOZEN-GULKAN) respuesta cíclica; Modelo matemático usando “Hinges” como elemento inelástico

134
Anexo C: (MARCO SOZEN-GULKAN) Respuesta sísmica; modelo matemático usando “Links” como elementos inelásticos. (Modelo S2)
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1 ‐0.8 ‐0.6 ‐0.4 ‐0.2 0 0.2 0.4 0.6 0.8 1
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
COMPARACIÓN CURVA EXPERIMENTAL VS CURVA MODELO LINKS
Modelo SAP
Ciclo 6 Exp
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
COMPARACIÓN CURVA EXPERIMENTAL VS CURVA MODELO LINKS
Modelo SAP
Ciclo 9 Exp
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
COMPARACIÓN CURVA EXPERIMENTAL VS CURVA MODELO LINKS
Modelo SAP
Ciclo 13 Exp
‐4000
‐3000
‐2000
‐1000
0
1000
2000
3000
4000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
COMPARACIÓN CURVA EXPERIMENTAL VS CURVA MODELO LINKS
Modelo SAP
Ciclo 12 Exp
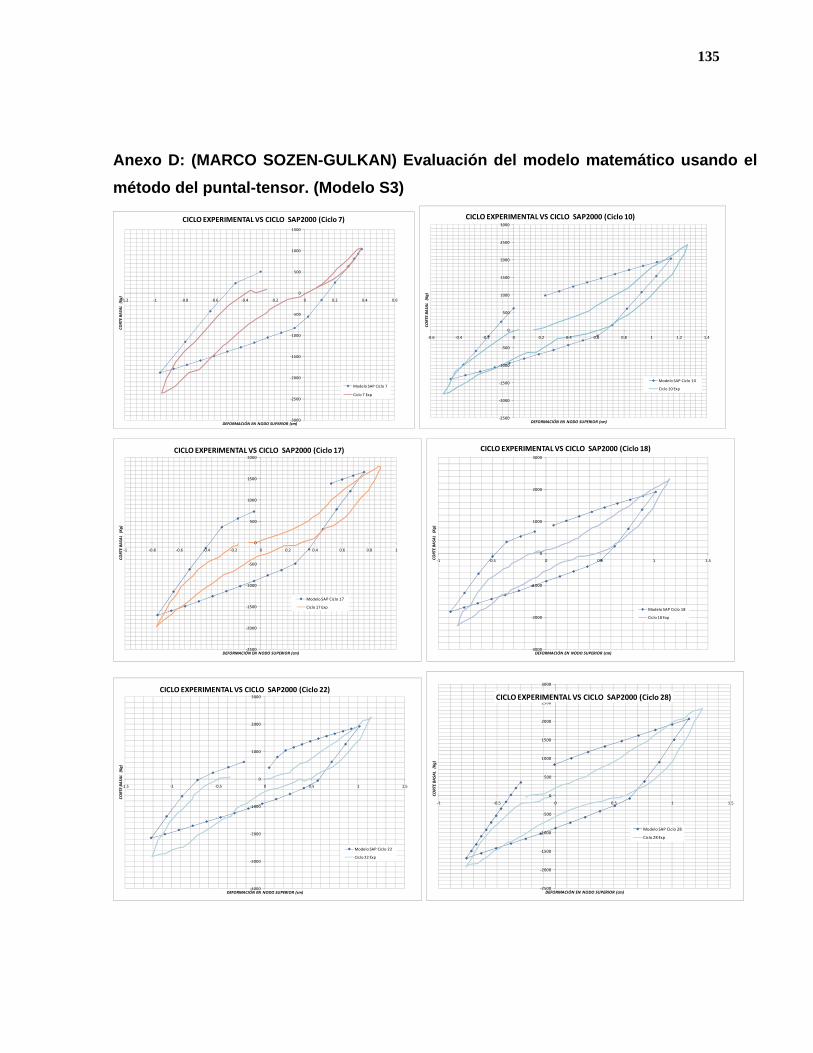
135
Anexo D: (MARCO SOZEN-GULKAN) Evaluación del modelo matemático usando el método del puntal-tensor. (Modelo S3)
‐3000
‐2500
‐2000
‐1500
‐1000
‐500
0
500
1000
1500
‐1.2 ‐1 ‐0.8 ‐0.6 ‐0.4 ‐0.2 0 0.2 0.4 0.6
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 7)
Modelo SAP Ciclo 7
Ciclo 7 Exp
‐2500
‐2000
‐1500
‐1000
‐500
0
500
1000
1500
2000
2500
3000
‐0.6 ‐0.4 ‐0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
CORTE BA
SAL (K
g)DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 10)
Modelo SAP Ciclo 10
Ciclo 10 Exp
‐2500
‐2000
‐1500
‐1000
‐500
0
500
1000
1500
2000
‐1 ‐0.8 ‐0.6 ‐0.4 ‐0.2 0 0.2 0.4 0.6 0.8 1
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 17)
Modelo SAP Ciclo 17
Ciclo 17 Exp
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1 ‐0.5 0 0.5 1 1.5CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 18)
Modelo SAP Ciclo 18
Ciclo 18 Exp
‐4000
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 22)
Modelo SAP Ciclo 22
Ciclo 22 Exp
‐2500
‐2000
‐1500
‐1000
‐500
0
500
1000
1500
2000
2500
3000
‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 28)
Modelo SAP Ciclo 28
Ciclo 28 Exp
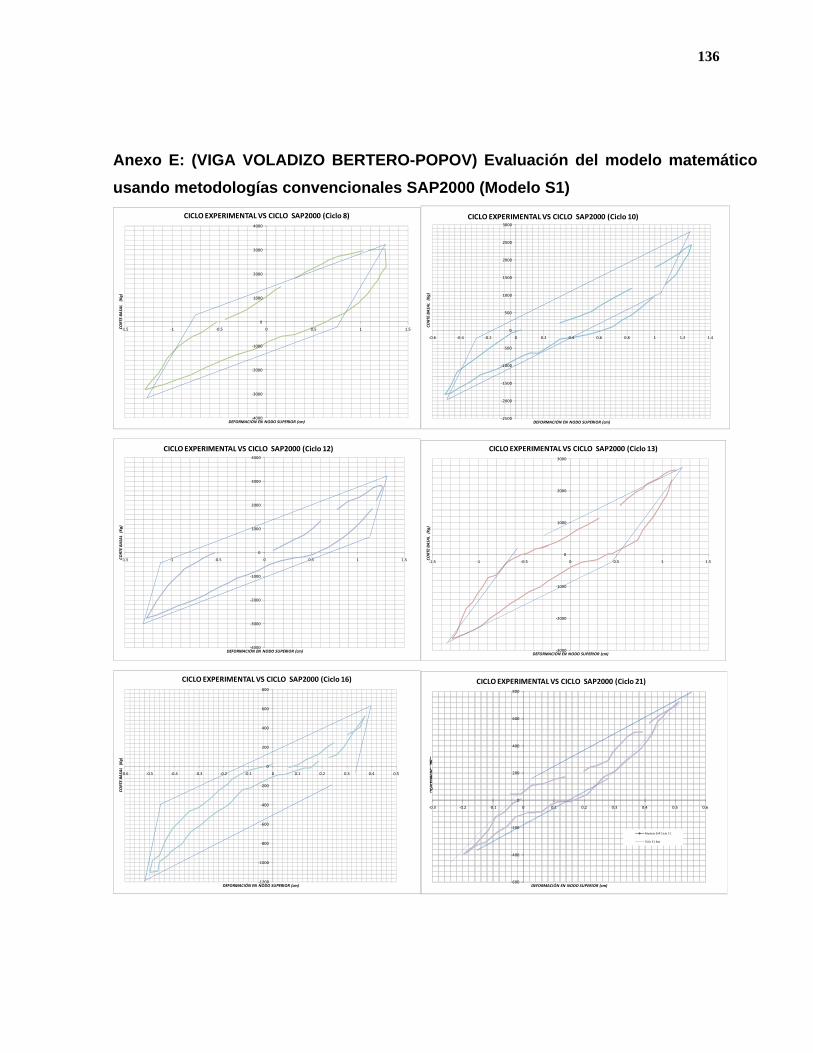
136
Anexo E: (VIGA VOLADIZO BERTERO-POPOV) Evaluación del modelo matemático usando metodologías convencionales SAP2000 (Modelo S1)
‐4000
‐3000
‐2000
‐1000
0
1000
2000
3000
4000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5CORTE BA
SAL (Kg
)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 8)
‐2500
‐2000
‐1500
‐1000
‐500
0
500
1000
1500
2000
2500
3000
‐0.6 ‐0.4 ‐0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
CORTE BA
SAL (K
g)DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 10)
‐4000
‐3000
‐2000
‐1000
0
1000
2000
3000
4000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 12)
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 13)
‐1200
‐1000
‐800
‐600
‐400
‐200
0
200
400
600
800
‐0.6 ‐0.5 ‐0.4 ‐0.3 ‐0.2 ‐0.1 0 0.1 0.2 0.3 0.4 0.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 16)
‐600
‐400
‐200
0
200
400
600
800
‐0.3 ‐0.2 ‐0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
CORTE BASAL (Kg)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 21)
Modelo SAP Ciclo 21
Ciclo 21 Exp
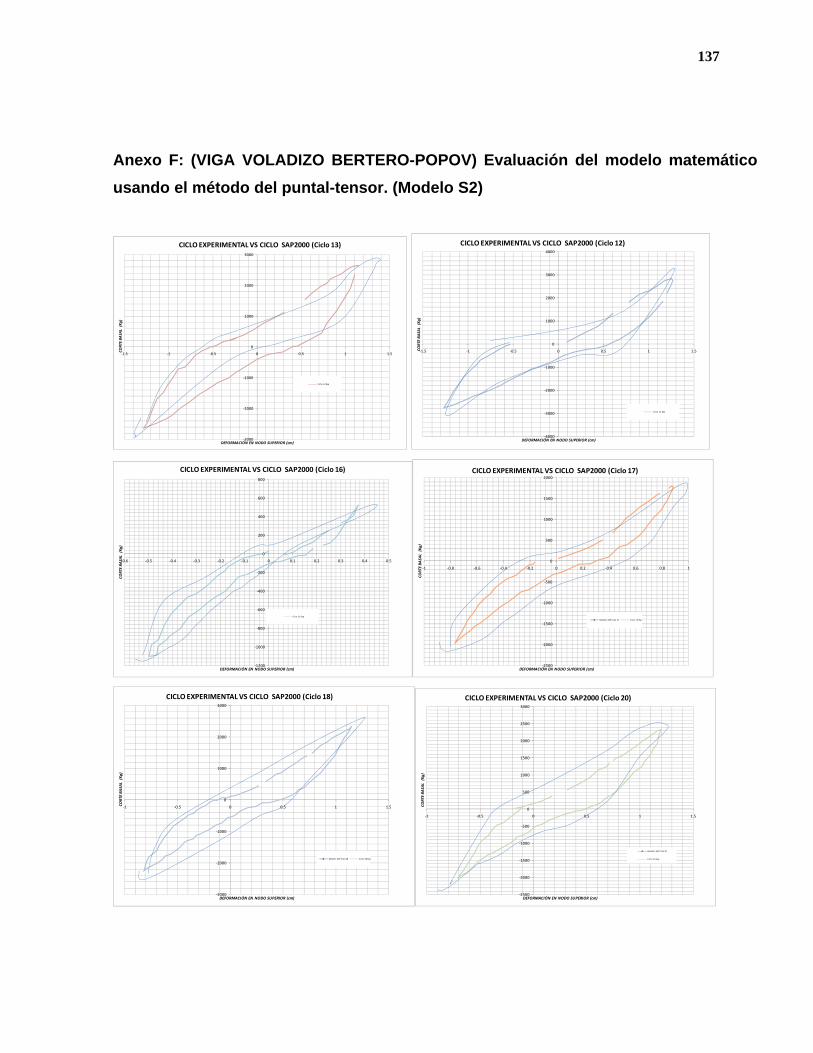
137
Anexo F: (VIGA VOLADIZO BERTERO-POPOV) Evaluación del modelo matemático usando el método del puntal-tensor. (Modelo S2)
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 13)
Ciclo 13 Exp
‐4000
‐3000
‐2000
‐1000
0
1000
2000
3000
4000
‐1.5 ‐1 ‐0.5 0 0.5 1 1.5CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 12)
Ciclo 12 Exp
‐1200
‐1000
‐800
‐600
‐400
‐200
0
200
400
600
800
‐0.6 ‐0.5 ‐0.4 ‐0.3 ‐0.2 ‐0.1 0 0.1 0.2 0.3 0.4 0.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 16)
Ciclo 16 Exp
‐2500
‐2000
‐1500
‐1000
‐500
0
500
1000
1500
2000
‐1 ‐0.8 ‐0.6 ‐0.4 ‐0.2 0 0.2 0.4 0.6 0.8 1
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 17)
Modelo SAP Ciclo 17 Ciclo 17 Exp
‐3000
‐2000
‐1000
0
1000
2000
3000
‐1 ‐0.5 0 0.5 1 1.5CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 18)
Modelo SAP Ciclo 18 Ciclo 18 Exp
‐2500
‐2000
‐1500
‐1000
‐500
0
500
1000
1500
2000
2500
3000
‐1 ‐0.5 0 0.5 1 1.5
CORTE BA
SAL (K
g)
DEFORMACIÓN EN NODO SUPERIOR (cm)
CICLO EXPERIMENTAL VS CICLO SAP2000 (Ciclo 20)
Modelo SAP Ciclo 20
Ciclo 20 Exp