Download - TEORI
SEVEN.H.B.SIREGAR2010-11-270
LAPORAN PRAKTIKUM
ELEKTRONIKA DAYA
Nama : Adelina Rahma
Nim : 2010-11-016
Kelompook : F2
Kelas : F
Jurusan : S1 Teknik Elektro
Asisten : Gelana
LABORATORIUM ELEKTRONIKA INDUSTRI
SEKOLAH TINGGI TEKNIK – PLN
JAKARTA , 2012
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
LAPORAN PRAKTIKUM
ELEKTRONIKA DAYA
Nama : Rizki Fadillah
Nim : 2010-11-004
Kelompook : F1
Kelas : F
Jurusan : S1 Teknik Elektro
Asisten :
LABORATORIUM ELEKTRONIKA INDUSTRI
SEKOLAH TINGGI TEKNIK – PLN
JAKARTA , 2012
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
LAPORAN PRAKTIKUM
ELEKTRONIKA DAYA
Nama : R Dayu Anggoro
Nim : 2010-11-043
Kelompook : F2
Kelas : F
Jurusan : S1 Teknik Elektro
Asisten : Gelana
LABORATORIUM ELEKTRONIKA INDUSTRI
SEKOLAH TINGGI TEKNIK – PLN
JAKARTA , 2012
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
TUGAS RUMAH
MIKROPROSESOR
Nama : Maulana Ibrohim
Nim : 2010-11-008
Kelompook : F2
Kelas : F
Jurusan : S1 Teknik Elektro
LABORATORIUM ELEKTRONIKA INDUSTRI
SEKOLAH TINGGI TEKNIK – PLN
JAKARTA , 2012
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
TUGAS RUMAH
MIKROPROSESOR
Nama :
Nim :
Kelompook :
Kelas :
Jurusan :
LABORATORIUM ELEKTRONIKA INDUSTRI
SEKOLAH TINGGI TEKNIK – PLN
JAKARTA , 2012
PROGRAM 1 :
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
START: JMP MULAI
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
mulai:
mov dx, 03h
mov al, 80h
out dx,al
putar:
mov dx, 00h
mov al, 7
out dx,al
jmp putar
delay proc near
push cx
mov cx,02fffh
loop $
pop cx
ret
delay endp
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
ANIMASI 1:
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
START: JMP MULAI
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
mulai:
mov AL,80h
mov DX,CW
out dx,al
putar:
mov AL,255
mov DX,PORTA
out dx,al
CALL DELAY
MOV DX,PORTA
MOV AL,0
OUT DX,AL
CALL DELAY
JMP PUTAR
delay proc near
push cx
mov cx,02fffh
loop $
pop cx
ret
delay endp
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
ANIMASI 2:
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
START: JMP MULAI
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
mulai:
mov AL,80h
mov DX,CW
out dx,al
ULANG:
MOV AL,1
MOV CX,8
putar:
mov DX,PORTA
out dx,al
CALL DELAY
SHL AL,1
LOOP PUTAR
JMP ULANG
delay proc near
push cx
mov cx,02fffh
loop $
pop cx
ret
delay endp
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
ANIMASI 3 :
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
START: JMP MULAI
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
AWAL DB ?
DATA1 DB ?
DATA2 DB ?
AKHIR DB ?
mulai:
mov AL,80h
mov DX,CW
out dx,al
ULANG:
MOV DATA1,1
MOV DATA2,128
MOV CX,4
putar:
mov DX,PORTA
MOV AL,DATA1
OR AL,DATA2
out dx,al
CALL DELAY
MOV AL,DATA1
SHL AL,1
MOV DATA1,AL
MOV AL,DATA2
SHR AL,1
MOV DATA2,AL
LOOP PUTAR
JMP ULANG
delay proc near
push cx
mov cx,03fffh
loop $
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
pop cx
ret
delay endp
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
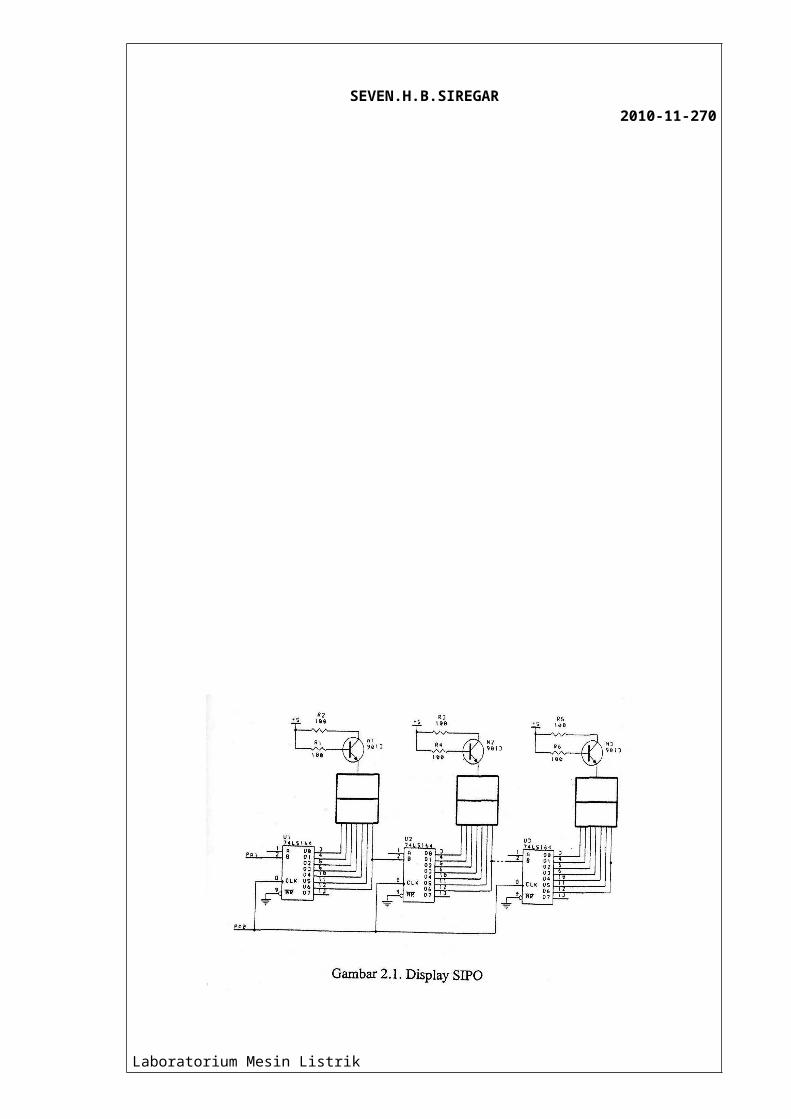
PROGRAM SIPO :
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
START: JMP MULAI
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
mulai:
mov AL,80h
mov DX,CW
out dx,al
putar:
MOV AL,0
mov DX,PORTA
OUT DX,AL
CALL PULSE
CALL DELAY
JMP PUTAR
delay proc near
push cx
mov cx,0Ffffh
loop $
pop cx
ret
delay endp
PULSE PROC NEAR
OR AL,1
OUT DX,AL
RET
PULSE ENDP
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
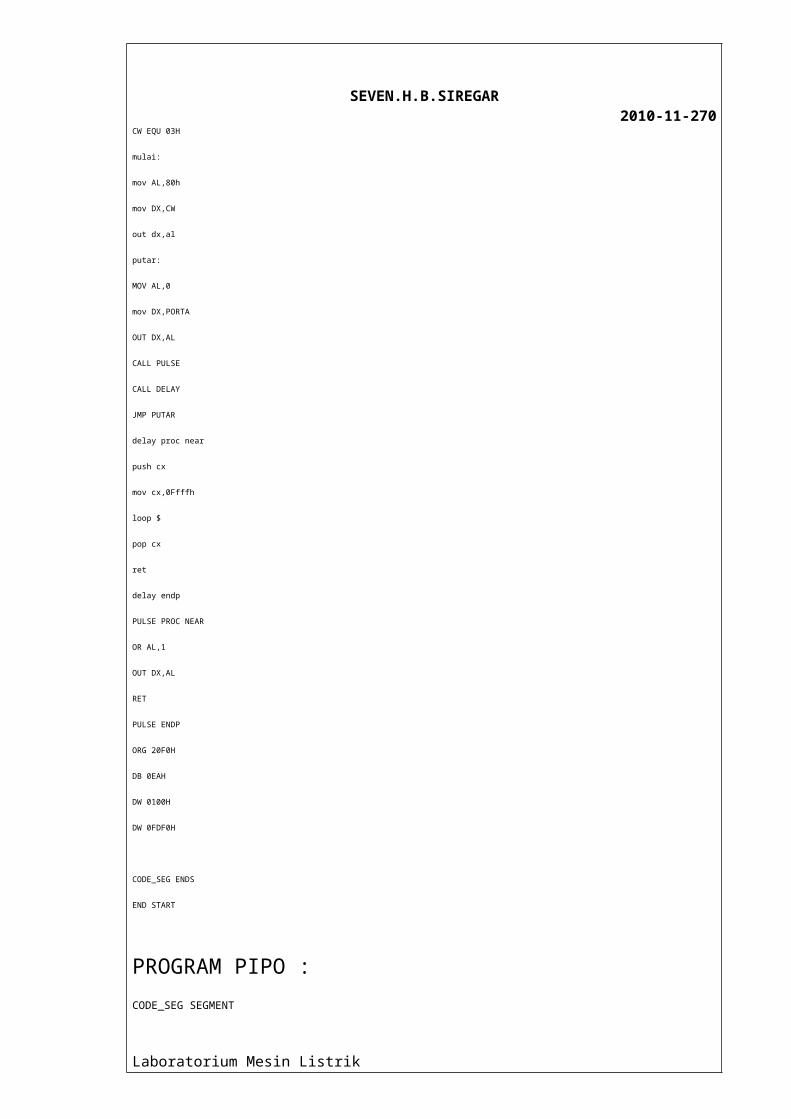
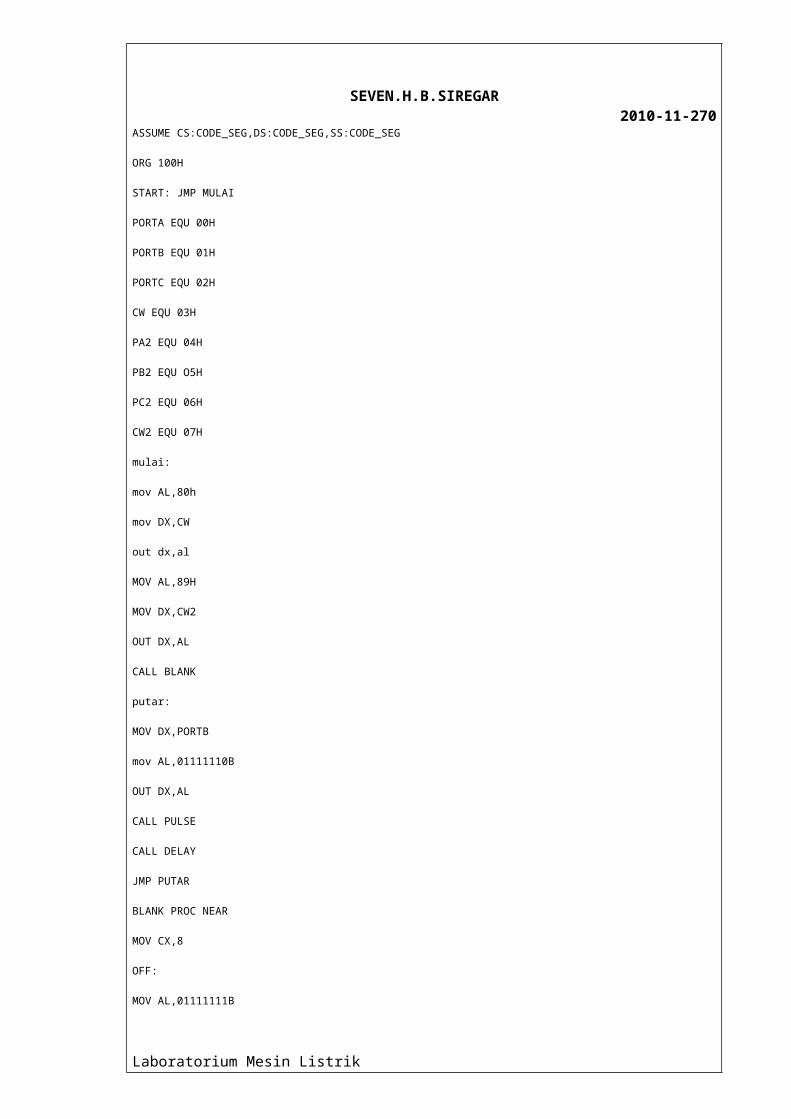
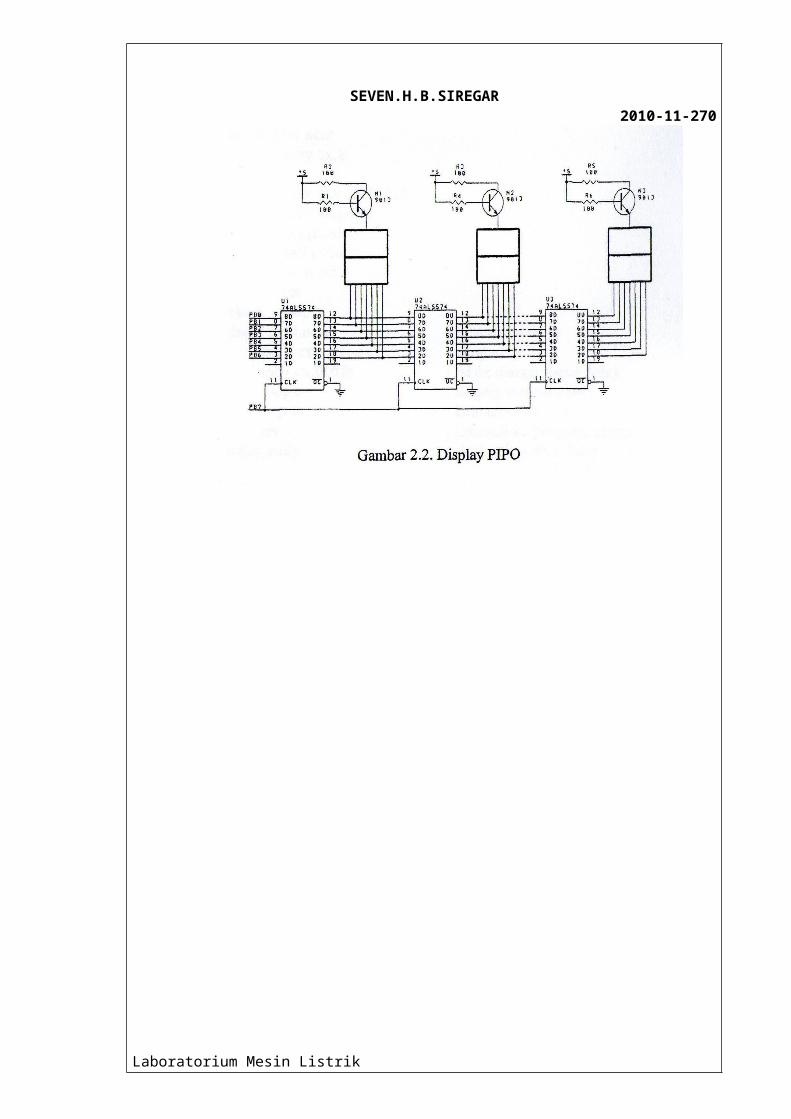
PROGRAM PIPO :
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
START: JMP MULAI
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
PA2 EQU 04H
PB2 EQU O5H
PC2 EQU 06H
CW2 EQU 07H
mulai:
mov AL,80h
mov DX,CW
out dx,al
MOV AL,89H
MOV DX,CW2
OUT DX,AL
CALL BLANK
putar:
MOV DX,PORTB
mov AL,01111110B
OUT DX,AL
CALL PULSE
CALL DELAY
JMP PUTAR
BLANK PROC NEAR
MOV CX,8
OFF:
MOV AL,01111111B
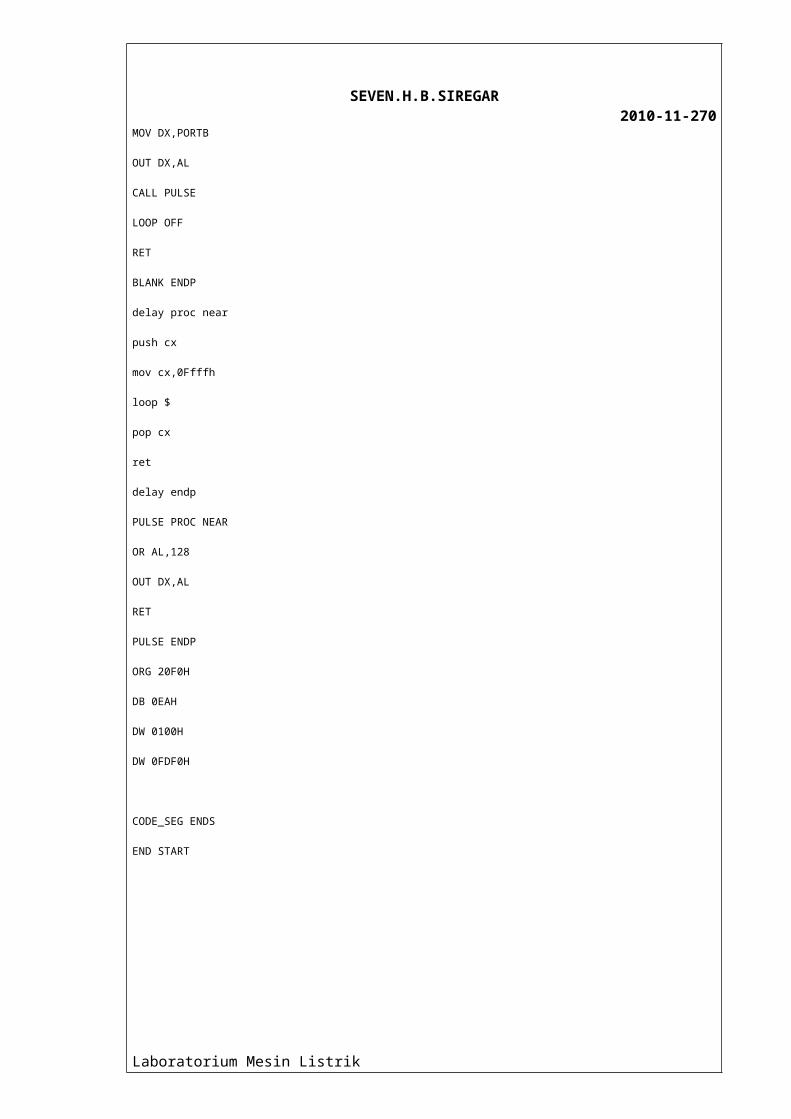
MOV DX,PORTB
OUT DX,AL
CALL PULSE
LOOP OFF
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
RET
BLANK ENDP
delay proc near
push cx
mov cx,0Ffffh
loop $
pop cx
ret
delay endp
PULSE PROC NEAR
OR AL,128
OUT DX,AL
RET
PULSE ENDP
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
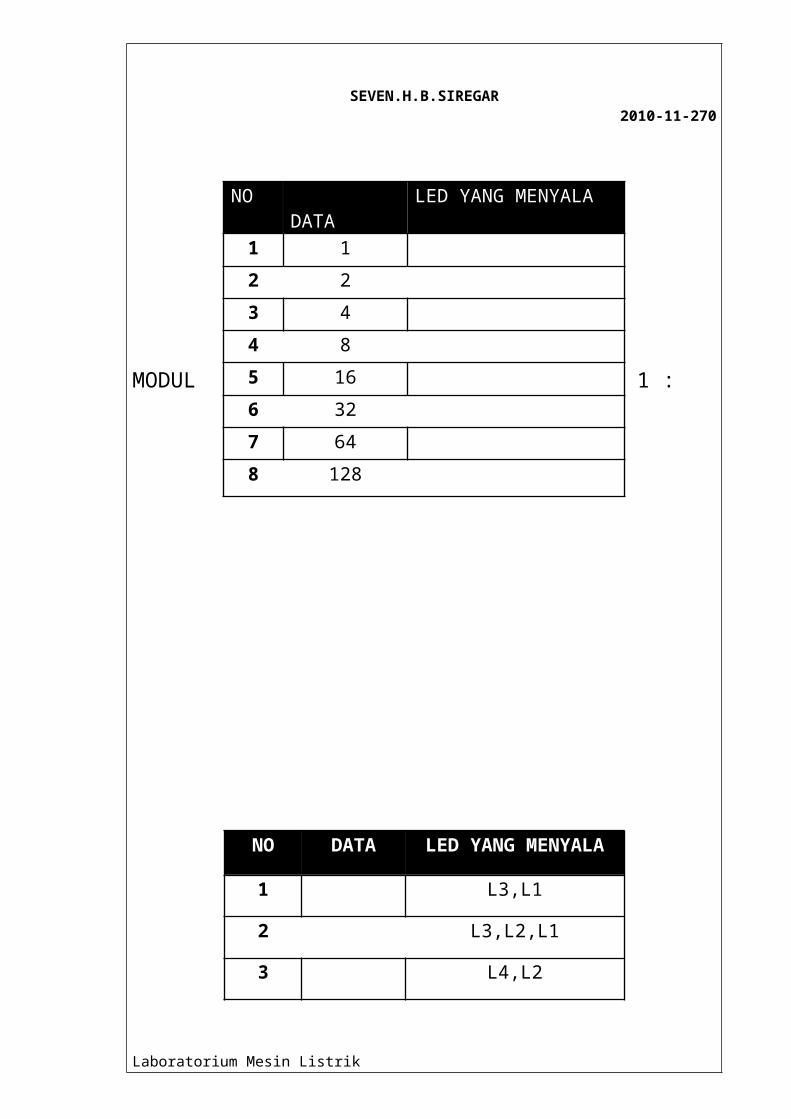
MODUL 1 :
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
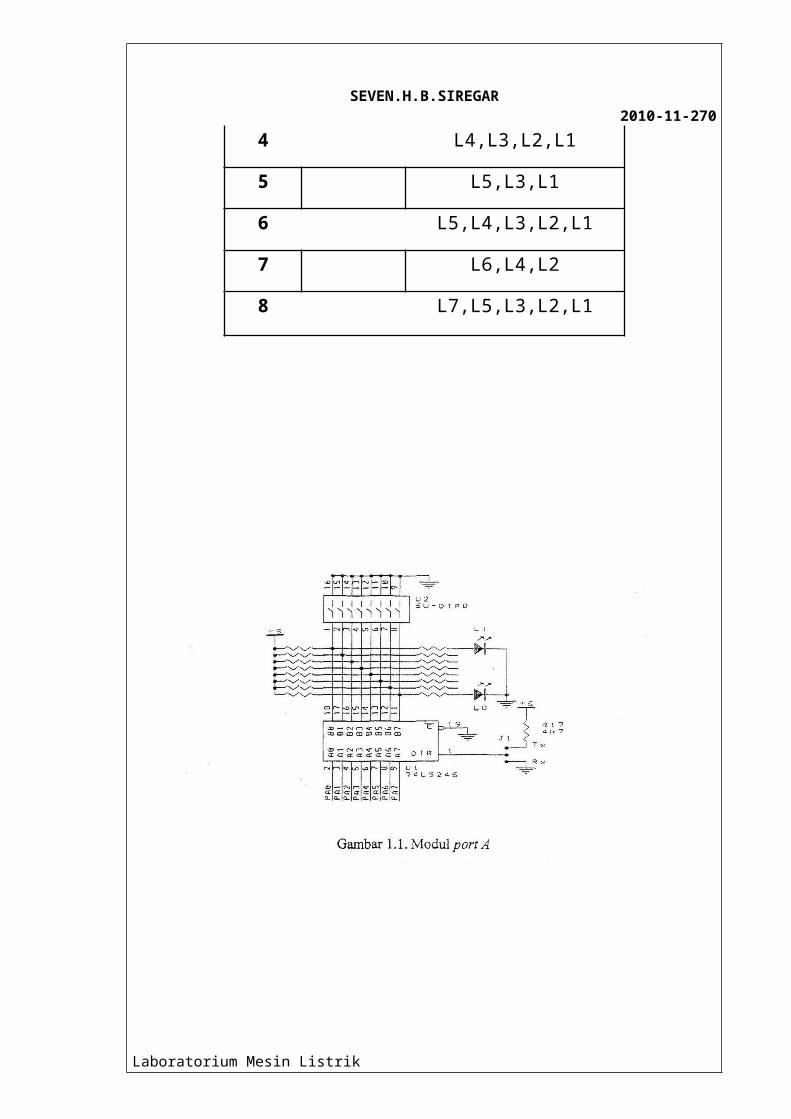
NO DATA LED YANG MENYALA
1 L3,L1
2 L3,L2,L1
3 L4,L2
4 L4,L3,L2,L1
5 L5,L3,L1
6 L5,L4,L3,L2,L1
7 L6,L4,L2
8 L7,L5,L3,L2,L1
Laboratorium Mesin Listrik
NO DATA LED YANG MENYALA
1 1
2 2
3 4
4 8
5 16
6 32
7 64
8 128
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
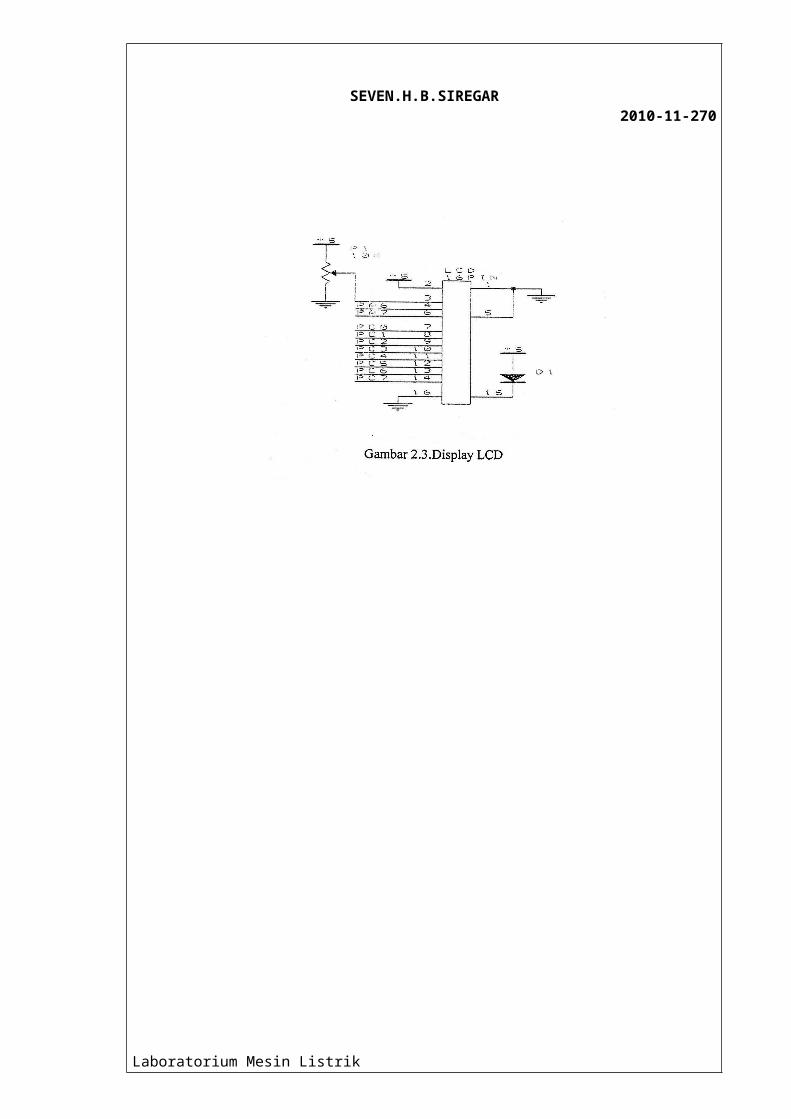
PROGRAM LCD :CODE_SEG SEGMENT
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
ASSUME CS:CODE_SEG,DS:CODE_SEG,ES:CODE_SEG,SS:CODE_SEG
ORG 100H
START: JMP MULAI
DISPCLR EQU 00000001B
FUNCSET EQU 00111000B
ENTRMOD EQU 00000110B
DISPON EQU 00001100B
PA EQU 00H
PB EQU 01H
PC EQU 02H
CW EQU 03H
AWAL DB ?
DATA DB ?
AKHIR DB ?
MULAI:
MOV AX, CS
MOV DS, AX
XOR AX, AX
MOV ES, AX
MOV SS, AX
LEA SI, AWAL
LEA CX, AKHIR
MOV DI, SI
SUB CX, SI
CLD
REP MOVSB
MOV SP,2000H
XOR AX,AX
MOV DS,AX
MOV DX,CW
MOV AL,82H
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
OUT DX,AL
CALL INIT_LCD
MOV DATA,80H
CALL CONTROL_OUT
MOV DATA,30H
CALL DATA_OUT
MOV DATA,81H
CALL CONTROL_OUT
MOV DATA,31H
CALL DATA_OUT
MOV DATA,0C0H
CALL CONTROL_OUT
MOV DATA,32H
CALL DATA_OUT
MOV DATA,0C1H
CALL CONTROL_OUT
MOV DATA,33H
CALL DATA_OUT
LAGI:
JMP LAGI
INIT_LCD PROC NEAR
MOV DATA,DISPCLR
CALL CONTROL_OUT
CALL DELAY
MOV DATA,FUNCSET
CALL CONTROL_OUT
CALL DELAY
MOV DATA,ENTRMOD
CALL CONTROL_OUT
CALL DELAY
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
MOV DATA,DISPON
CALL CONTROL_OUT
CALL DELAY
RET
INIT_LCD ENDP
CONTROL_OUT PROC NEAR
MOV DX,PA
MOV AL,00000000B
OUT DX,AL
CALL DELAY
MOV DX,PA
MOV AL,10000000B
OUT DX,AL
CALL DELAY
MOV DX,PC
MOV AL,DATA
OUT DX,AL
CALL DELAY
MOV DX,PA
MOV AL,00000000B
OUT DX,AL
CALL DELAY
RET
CONTROL_OUT ENDP
DATA_OUT PROC NEAR
MOV DX,PA
MOV AL,01000000B
OUT DX,AL
CALL DELAY
MOV DX,PA
MOV AL,11000000B
OUT DX,AL
CALL DELAY
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
MOV DX,PC
MOV AL,DATA
OUT DX,AL
CALL DELAY
MOV DX,PA
MOV AL,01000000B
OUT DX,AL
CALL DELAY
RET
DATA_OUT ENDP
DELLAY PROC NEAR
PUSH CX
MOV CX,0FFFH
LOOP $
POP CX
RET
DELLAY ENDP
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
PROGRAM MOTOR DC:
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,ES:CODE_SEG,SS:CODE_SEG
ORG 100H
start: jmp mulai
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
pa2 equ 304h
pb2 equ 305h
pc2 equ 306h
cw2 equ 307h
mulai:
Mov AL,80H
Mov DX,CW
OUT DX,AL
Mov AL,10001001B
Mov DX,CW2
OUT DX,AL
PUTAR:
MOV DX,PORTC
MOV AL,0
OUT DX,AL
JMP PUTAR
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
PROGRAM MOTOR DC 1:
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,ES:CODE_SEG,SS:CODE_SEG
ORG 100H
start: jmp mulai
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
pa2 equ 304h
pb2 equ 305h
pc2 equ 306h
cw2 equ 307h
mulai:
Mov AL,80H
Mov DX,CW
OUT DX,AL
Mov AL,10001001B
Mov DX,CW2
OUT DX,AL
PUTAR:
MOV DX,PORTC
MOV AL,128
OUT DX,AL
JMP PUTAR
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
PROGRAM MOTOR DC 2:
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,ES:CODE_SEG,SS:CODE_SEG
ORG 100H
start: jmp mulai
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
pa2 equ 304h
pb2 equ 305h
pc2 equ 306h
cw2 equ 307h
mulai:
Mov AL,80H
Mov DX,CW
OUT DX,AL
Mov AL,10001001B
Mov DX,CW2
OUT DX,AL
PUTAR:
MOV DX,PORTC
MOV AL,255
OUT DX,AL
JMP PUTAR
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
PROGRAM MOTOR DC 3:
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
ASSUME CS:CODE_SEG,DS:CODE_SEG,ES:CODE_SEG,SS:CODE_SEG
ORG 100H
start: jmp mulai
PORTA EQU 00H
PORTB EQU 01H
PORTC EQU 02H
CW EQU 03H
pa2 equ 304h
pb2 equ 305h
pc2 equ 306h
cw2 equ 307h
mulai:
Mov AL,80H
Mov DX,CW
OUT DX,AL
Mov AL,10001001B
Mov DX,CW2
OUT DX,AL
PUTAR:
MOV DX,PORTC
MOV AL,0
OUT DX,AL
MOV DX,PORTB
MOV AL,3
OUT DX,AL
JMP PUTAR
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
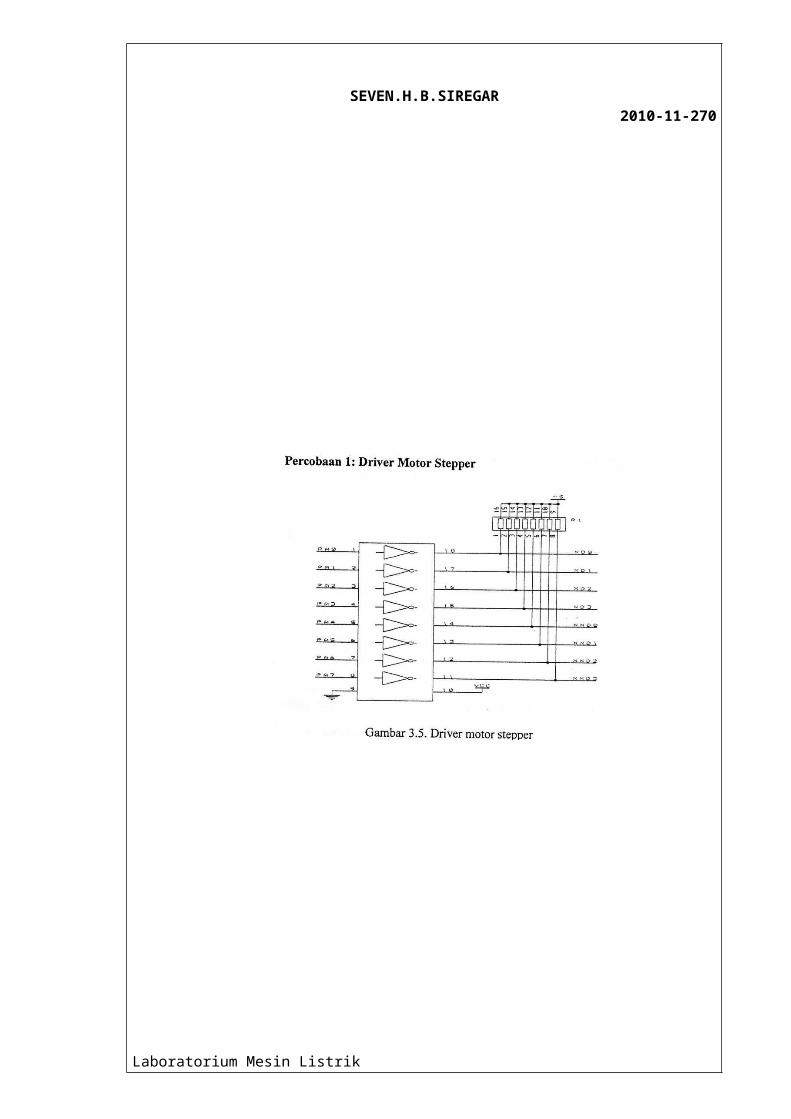
PROGRAM MOTOR STEPPER:
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
start: jmp mulai
porta equ 00h
portb equ 01h
portc equ 02h
cw equ 03h
pa2 equ 304h
pb2 equ 305h
pc2 equ 306h
cw2 equ 307h
mulai:
mov al,80h
mov dx,cw
out dx,al
mov al,10001001b
mov dx,cw2
out dx,al
putar:
mov dx,porta
mov al,7
out dx,al
call delay
mov dx,porta
mov al,11
out dx,al
call delay
mov dx,porta
mov al,13
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
out dx,al
call delay
mov dx,porta
mov al,14
out dx,al
call delay
jmp putar
delay proc near
push cx
mov cx,01ffh
loop $
pop cx
ret
delay endp
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
Laboratorium Mesin Listrik
SEGMENT KE SEGMENT
SEVEN.H.B.SIREGAR2010-11-270
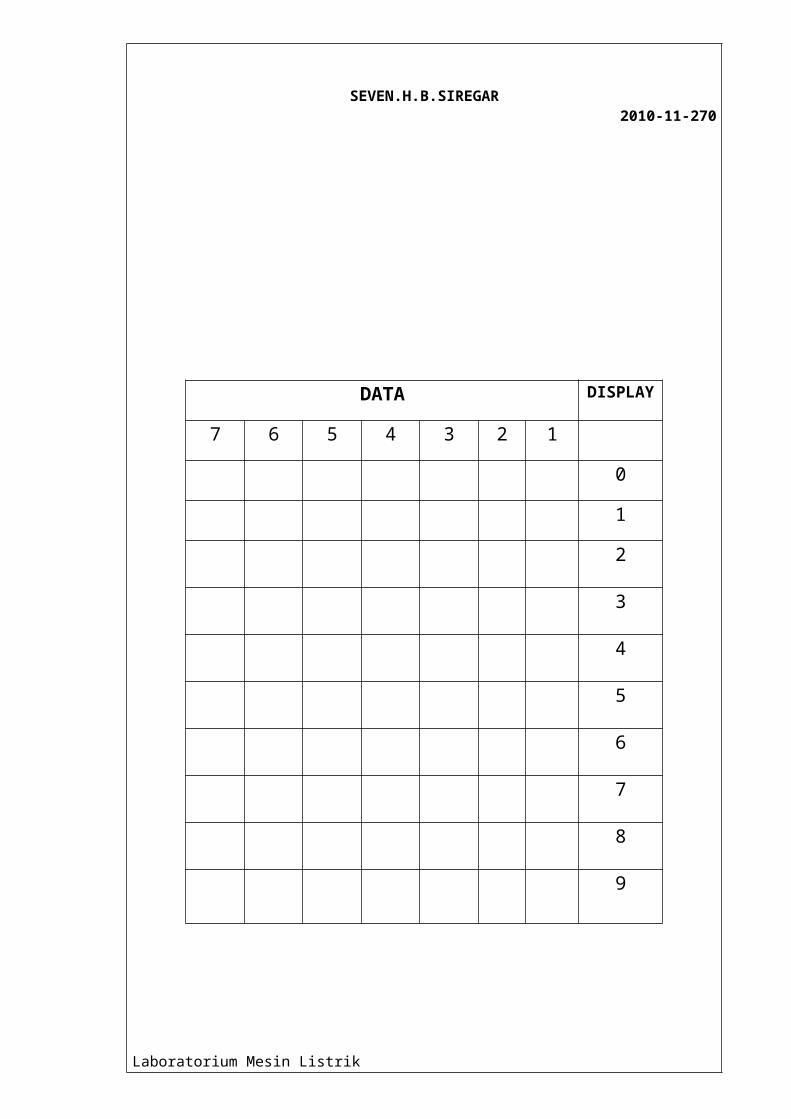
DATA DISPLAY
7 6 5 4 3 2 1
0
1
2
3
4
5
6
7
8
9
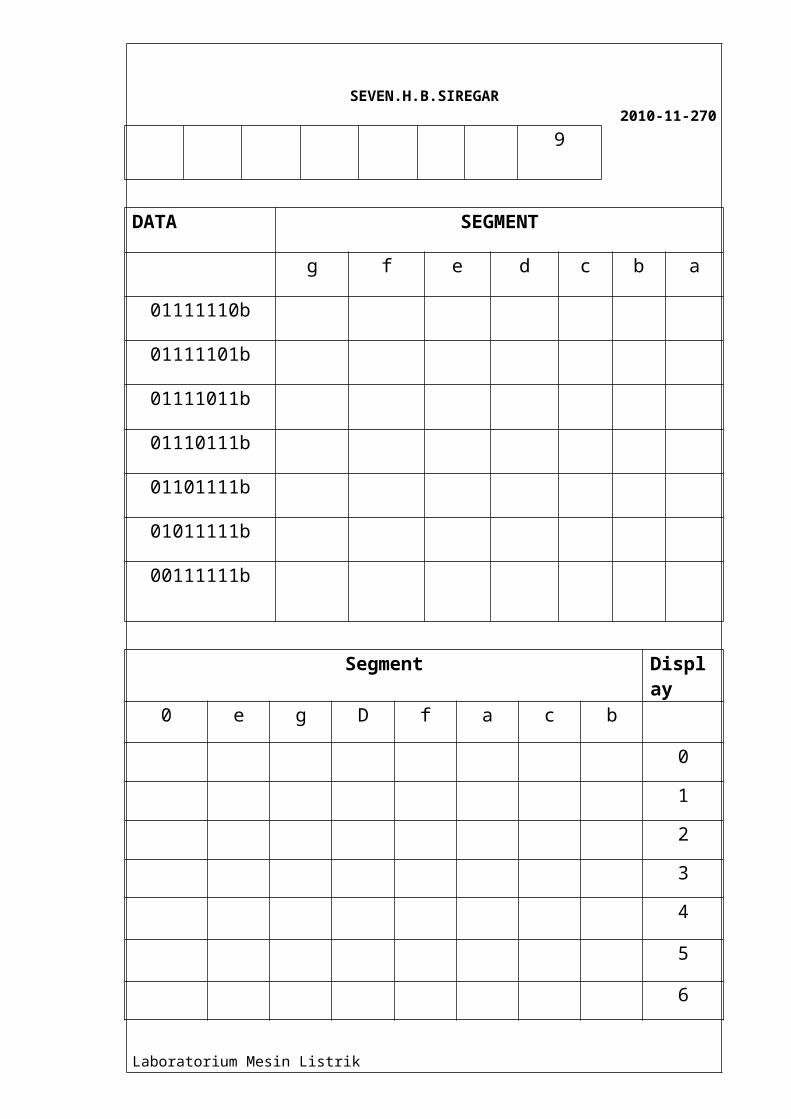
DATA SEGMENT
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
g f e d c b a
01111110b
01111101b
01111011b
01110111b
01101111b
01011111b
00111111b
Segment Display
0 e g D f a c b
0
1
2
3
4
5
6
7
8
9
Laboratorium Mesin Listrik
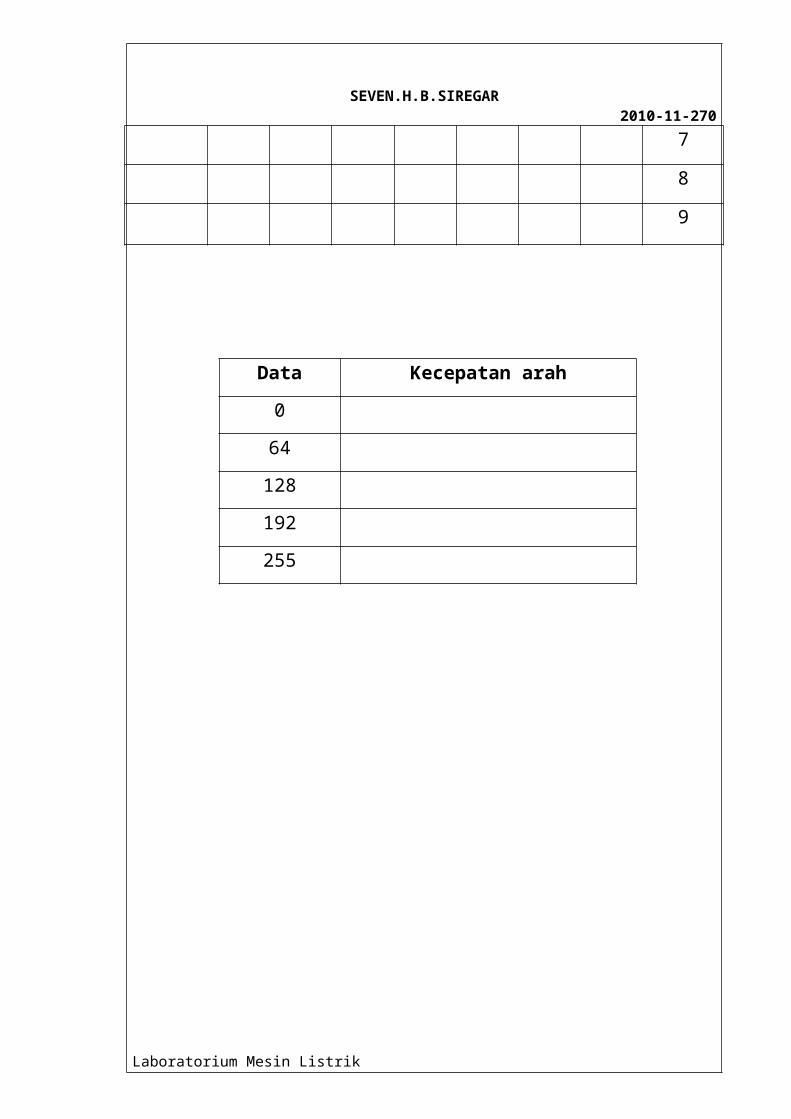
Data Kecepatan arah
0
64
128
192
255
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
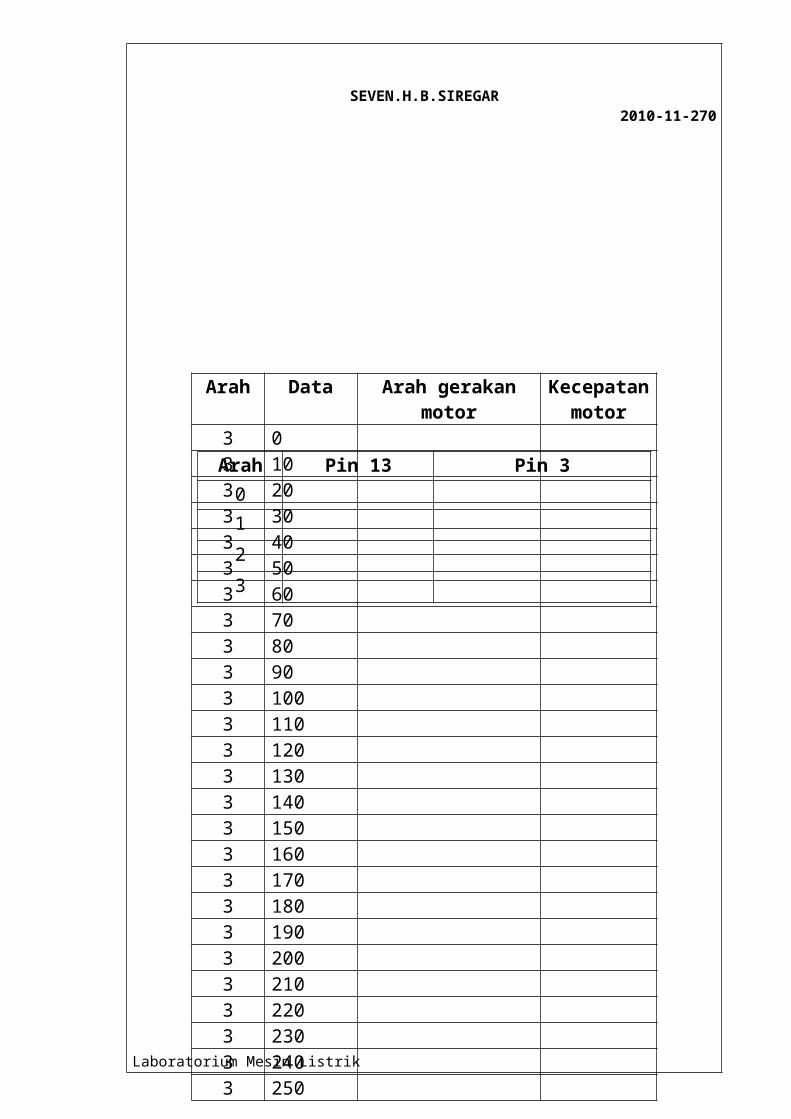
Arah Pin 13 Pin 3
0
1
2
3
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
Arah Data Arah gerakan motor
Kecepatan motor
3 03 103 203 303 403 503 603 703 803 903 1003 1103 1203 1303 1403 1503 1603 1703 1803 1903 2003 2103 2203 2303 2403 250
SEVEN.H.B.SIREGAR2010-11-270
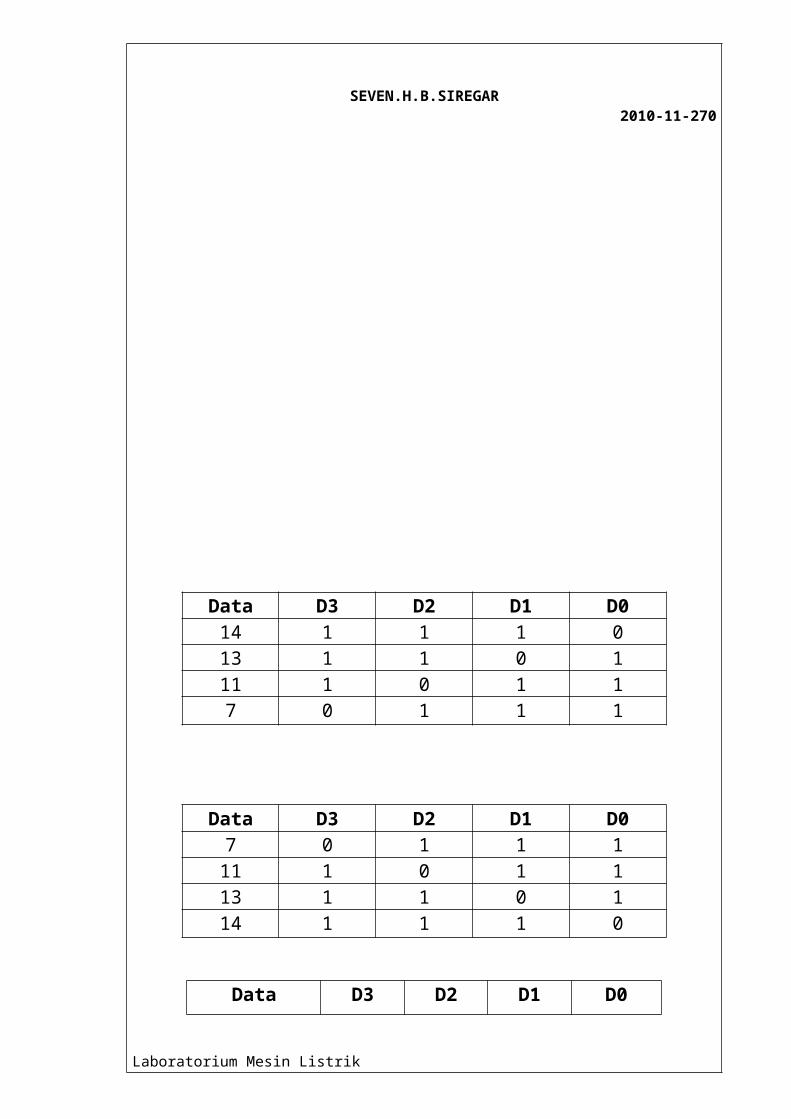
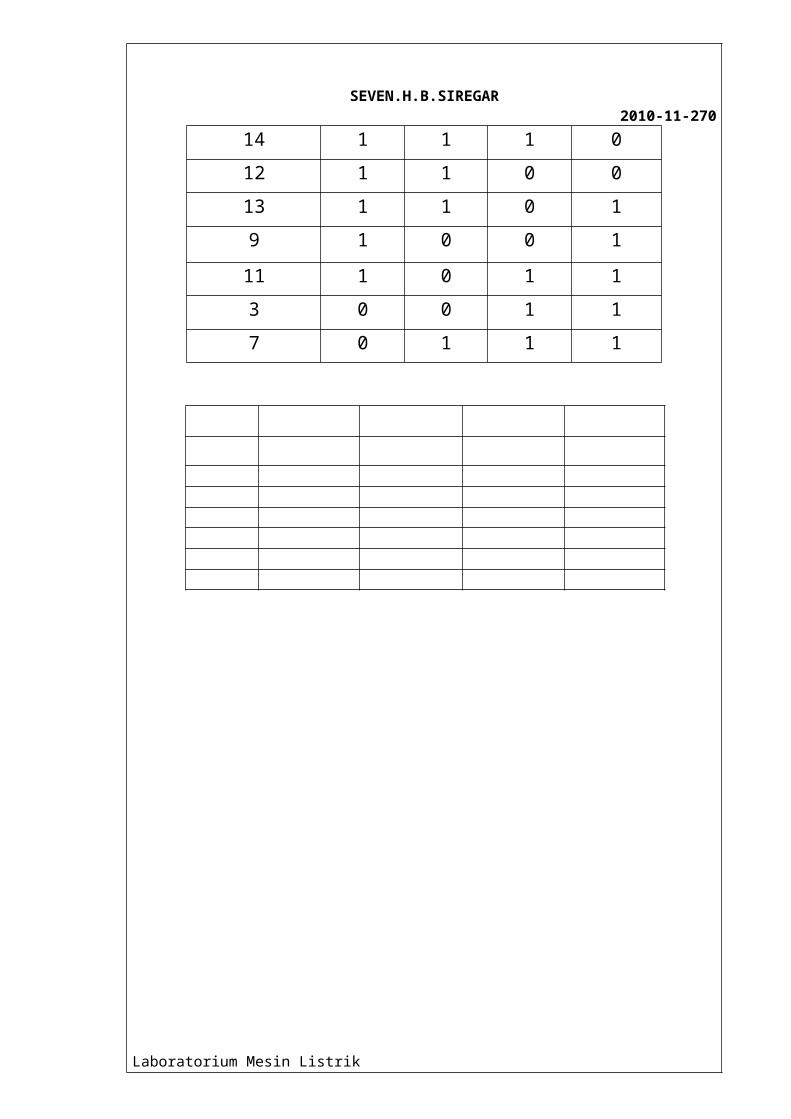
Data D3 D2 D1 D0
14 1 1 1 0
13 1 1 0 1
11 1 0 1 1
7 0 1 1 1
Data D3 D2 D1 D0
7 0 1 1 1
11 1 0 1 1
13 1 1 0 1
14 1 1 1 0
Data D3 D2 D1 D0
14 1 1 1 0
12 1 1 0 0
13 1 1 0 1
9 1 0 0 1
11 1 0 1 1
3 0 0 1 1
7 0 1 1 1
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
DATA DISPLAY
7 6 5 4 3 2 1
0
1
2
3
4
5
6
7
8
9
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
TUGAS 2
Membuat Dispay angka 0-9 berjalan
; LESS12.ASM DIGUNAKAN UNTUK MENAMPLIKAN DISPLAY 0-9 BERJALAN PIPO
; pa6 pa5 pa4 pa3 pa2 pa1 pa0
; e g d f a c b
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,SS:CODE_SEG
ORG 100H
start: jmp mulai
porta equ 00h
portb equ 01h
portc equ 02h
cw equ 03h
a0 equ 00100000b
a1 equ 01111100b
a2 equ 00001010b
a3 equ 01001000b
a4 equ 01010100b
a5 equ 01000001b
a6 equ 00000001b
a7 equ 01111000b
a8 equ 00000000b
a9 equ 01000000b
ab equ 01011111b
ap equ 00010010b
mulai:
mov al,80h
mov dx,cw
out dx,al
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
call blank
putar:
mov dx,portb
mov al,a0
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a1
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a2
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a3
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a4
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a5
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a6
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a7
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a8
out dx,al
call pulse
calldelay
mov dx,portb
mov al,a9
out dx,al
call pulse
calldelay
jmp putar
blank proc near
mov cx,8
off:
mov al,01111111b
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
mov dx,portb
out dx,al
call pulse
loop off
ret
blank endp
pulse proc near
or al,128
out dx,al
ret
pulse endp
delay proc near
push cx
mov cx,2
xxx:
push cx
mov cx,0ffffh
loop $
pop cx
loop xxx
pop cx
ret
delay endp
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
TUGAS 3
MEMBUAT NAMA DAN NIM PADA DISPLAY LCD
CODE_SEG SEGMENT
ASSUME CS:CODE_SEG,DS:CODE_SEG,ES:CODE_SEG,SS
ORG 100H
start
DISPCLR EQU 00000001B
FUNCSET EQU 00111000B
ENTRMOD EQU 00000110B
DISPON EQU 00001100B
pa equ 00h
pb equ 01h
pc equ 02h
cw equ 03h
awal db ?
data db ?
akhir db ?
mulai:
Mov AX, CS
Mov DS, AX
Xor AX, AX
Mov ES, AX
Mov SS, Ax
Lea SI, Awal
Lea CX, Akhir
Mov DI, SI
Sub CX, SI
Cld
Rep Movsb
Mov SP,2000h
Xor AX,AX
Mov DS,AX
; 1 0 0 A Cu 0 B Cl
; 1 0 0 0 0 0 1 0
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
movdx,cw
moval,82h
out dx,al
call init_LCD
movdata,80h
call control_out
movdata,'a'
call data_out
movdata,81h
call control_out
movdata,'d'
call data_out
movdata,82h
call control_out
movdata,'e'
call data_out
movdata,83h
call control_out
movdata,'l'
call data_out
movdata,84h
call control_out
movdata,'i'
call data_out
movdata,0C0h
call control_out
movdata,'0'
call data_out
movdata,0C1h
call control_out
movdata,'1'
call data_out
movdata,0C2h
call control_out
movdata,'6'
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
call data_out
lagi:
jmp lagi
init_LCD proc near
movdata,DISPCLR
call control_out
call delay
mov data,FUNCSET
call control_out
call delay
movdata,ENTRMOD
call control_out
call delay
movdata,DISPON
call control_out
call delay
ret
init_LCD endp
control_out proc near
mov dx,pa
moval,00000000b
out dx,al
call delay
mov dx,pa
moval,10000000b
out dx,al
call delay
movdx,pc
moval,data
out dx,al
call delay
mov dx,pa
moval,00000000b
out dx,al
call delay
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
ret
control_out endp
data_out proc near
mov dx,pa
moval,01000000b
out dx,al
call delay
mov dx,pa
moval,11000000b
out dx,al
call delay
movdx,pc
moval,data
out dx,al
call delay
mov dx,pa
moval,01000000b
out dx,al
call delay
ret
data_out endp
delay proc near
push cx
mov cx,0fffh
loop $
pop cx
ret
delay endp
ORG 20F0H
DB 0EAH
DW 0100H
DW 0FDF0H
CODE_SEG ENDS
END START
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
TEORI TAMBAHAN KURVA SATURASI SEBUAH ALTERNATOR
GENERATOR SINKRON
(ALTERNATOR)
Hampir semua energi listrik dibangkitkan dengan menggunakan mesin sinkron.Generator
sinkron (sering disebut alternator) adalah mesin sinkron yangdigunakan untuk mengubah daya
mekanik menjadi daya listrik.Generator sinkron dapat berupa generator sinkron tiga fasa atau
generator sinkron AC satu fasa tergantung dari kebutuhan.
1.1 Konstruksi Generator Sinkron
Pada generator sinkron, arus DC diterapkan pada lilitan rotor untuk mengahasilkan
medan magnet rotor. Rotor generator diputar oleh prime mover menghasilkan medan magnet
berputar pada mesin. Medan magnet putar ini menginduksi tegangan tiga fasa pada kumparan
stator generator.Rotor pada generator sinkron pada dasarnya adalah sebuah elektromagnet yang
besar. Kutub medan magnet rotor dapat berupa salient (kutub sepatu) dan dan non salient (rotor
silinder). Gambaran bentuk kutup sepatu generator sinkron diperlihatkan pada gambar di bawah
ini.
Gambar 1.1 Rotor salient (kutub sepatu) pada generator sinkron
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
Pada kutub salient, kutub magnet menonjol keluar dari permukaan rotor sedangkan pada
kutub non salient, konstruksi kutub magnet rata dengan permukaan rotor.
Rotor silinder umumnya digunakan untuk rotor dua kutub dan empat kutub, sedangkan
rotor kutub sepatu digunakan untuk rotor dengan empat atau lebih kutub.Pemilihan konstruksi
rotor tergantung dari kecepatan putar prime mover, frekuensi dan rating daya generator.
Generator dengan kecepatan 1500 rpm ke atas pada frekuensi 50 Hz dan rating daya sekitar
10MVA menggunakan rotor silinder. Sementara untuk daya dibawah 10 MVA dan kecepatan
rendah maka digunakan rotor kutub sepatu.Gambaran bentuk kutup silinder generator sinkron
diperlihatkan pada gambar di bawah ini.
(a) (b)
Gambar 1.2 Gambaranbentuk (a) rotor Non-salient (rotor silinder), (b) penampang rotor
pada generator sinkron
Arus DC disuplai ke rangkaian medan rotor dengan dua cara:
1. Menyuplai daya DC ke rangkaian dari sumber DC eksternal dengan
sarana slip ring dan sikat.
2. Menyuplai daya DC dari sumber DC khusus yang ditempelkan
langsung pada batang rotor generator sinkron.
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
TEORI TAMBAHAN PENGARUH KECEPATAN PDA SEBUAH ALTERNATOR
Kecepatan Putar Generator Sinkron
Frekuensi elektris yang dihasilkan generator sinkron adalah sinkron dengan kecepatan
putar generator.Rotor generator sinkron terdiri atas rangkaian elektromagnet dengan suplai arus
DC.Medan magnet rotor bergerak pada arah putaran rotor. Hubungan antara kecepatan putar
medan magnet pada mesin dengan frekuensi elektrik pada stator adalah:
f e=nr . p
120
(1.1)
yang mana:
fe = frekuensi listrik (Hz)
nr = kecepatan putar rotor = kecepatan medan magnet (rpm)
p = jumlah kutub magnet
Oleh karena rotor berputar pada kecepatan yang sama dengan medan magnet,
persamaan diatas juga menunjukkan hubungan antara kecepatan putar rotor dengan frekuensi
listrik yang dihasilkan. Agar daya listrik dibangkitkan tetap pada frekuensi 50Hz atau 60 Hz, maka
generator harus berputar pada kecepatan tetapdengan jumlah kutub mesin yang telah
ditentukan. Sebagai contoh untuk membangkitkan 60 Hz pada mesin dua kutub, rotor arus
berputar dengan kecepatan 3600 rpm.Untuk membangkitkan daya 50 Hz pada mesin empat
kutub, rotor harus berputar pada 1500 rpm.
Prinsip Kerja Generator Sinkron
Jika sebuah kumparan diputar pada kecepatan konstan pada medan magnethomogen, maka akan
terinduksi tegangan sinusoidal pada kumparan tersebut. Medan magnet bisa dihasilkan oleh
kumparan yang dialiri arus DC atau oleh magnet tetap. Pada mesin tipe ini medan magnet
diletakkan pada stator (disebut generator kutub eksternal / external pole generator) yang mana
energi listrik dibangkitkan padakumparan rotor. Hal ini dapat menimbulkan kerusakan pada slip
ring dan karbon sikat, sehingga menimbulkan permasalahan pada pembangkitan daya tinggi.
Untuk mengatasi permasalahan ini, digunakan tipe generator dengan kutub internal (internal pole
generator), yang mana medan magnet dibangkitkan oleh kutub rotor dan tegangan AC
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
dibangkitkan pada rangkaian stator. Tegangan yang dihasilkan akan sinusoidal jika rapat fluks
magnet pada celah udara terdistribusi sinusoidal dan rotor diputar pada kecepatan konstan.
Tegangan AC tiga fasa dibangkitan pada mesin sinkron kutub internal pada tiga kumparan stator
yang diset sedemikian rupa sehingga membentuk beda fasa dengan sudut 120°
Kurva Karakteristik Torsi-Kecepatan Motor Sinkron Motor sinkron pada dasarnya
merupakan alat yang menyuplai tenaga ke beban pada kecepatan konstan. Kecepatan putaran
motor adalah terkunci pada frekuensi listrik yang diterapkan, oleh karena itu kecepatan motor
adalah konstan pada beban bagaimanapun. Kecepatan motor yang tetap ini dari kondisi tanpa
beban sampai torsi maksimum yang bisa disuplai motor disebut torsi pullout. Bentuk karakteristik
torsi terhadap kecepatan ini diperlihatkan pada gambar di bawah ini.
Gambar 2.3 Karakteristik torsi – kecepatan
Dengan mengacu kebali ke persamaan (2.3) dapat dibuatkan kembali persamaan torsi motor
sinkron sebagai berikut.
T ind=3 .V φ. Ea . sin δ
ωm . Xs
Torsi maksimum motor terjadi ketika = 90°. Umumnya torsi maksimum motor sinkron adalah
tiga kali torsi beban penuhnya. Ketika torsi pada motor sinkron melebihi torsi maksimum maka
motor akan kehilangan sinkronisasi. persamaan Torsi maksimum (pullout) motor sinkron dapat
dibuatkan sebagai berikut.T ind=k . BR .Bnet
Dari persamaan di atas menunjukkan bahwa semakin besar arus medan, maka torsi maksimum
motor akan semakin besar.
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
TEORI TAMBAHAN KARKTERISTIK BEBAN SUATU ALTERNATOR
1. Alternator tanpa beban
Dengan memutar alternator pada kecepatan sinkron dan rotor diberi arus medan (IF),
maka tegangan (Ea ) akan terinduksi pada kumparan jangkar stator. Bentuk hubungannya
diperlihatkan pada persamaan berikut.
Ea = c.n.φ(1.2)
yang mana:
c = konstanta mesin
n = putaran sinkron
φ = fluks yang dihasilkan oleh IF
Dalam keadaan tanpa beban arus jangkar tidak mengalir pada stator, karenanya tidak
terdapat pengaruh reaksi jangkar. Fluks hanya dihasilkan oleh arus medan (IF). Apabila arus
medan (IF) diubah-ubah harganya, akan diperoleh harga Ea seperti yang terlihat pada kurva
sebagai berikut.
gambar 1.4 Karakteristik tanpa beban generator sinkron
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
2. Alternator Berbeban
Dalam keadaan berbeban arus jangkar akan mengalir dan mengakibatkan terjadinya
reaksi jangkar. Reaksi jangkar besifat reaktif karena itu dinyatakan sebagai reaktansi, dan disebut
reaktansi magnetisasi (Xm ). Reaktansi pemagnet (Xm ) ini bersama-sama dengan reaktansi fluks
bocor (Xa ) dikenal sebagai reaktansi sinkron (Xs) . Persamaan tegangan pada generator adalah:
Ea = V + I.Ra + j I.Xs (1.3)
Xs = Xm + Xa (1.4)
yang mana:
Ea = tegangan induksi pada jangkar
V = tegangan terminal output
Ra = resistansi jangkar
Xs = reaktansi sinkron
Karakteristik pembebanan dan diagram vektor dari alternator berbeban induktif (faktor
kerja terbelakang) dapat dilihat pada gambar di bawah ini :
Gambar 1.5 Karakteristik alternator berbeban induktif
Laboratorium Mesin Listrik
SEVEN.H.B.SIREGAR2010-11-270
2.1 Diagram Fasor
Gambar 1.9 Diagram fasor (a) Faktor daya satu (b) faktor daya tertinggal (c) faktor daya
mendahului
Diagram fasor memperlihatkan bahwa terjadinya pebedaan antara tegangan teminal V
dalam keadaan berbeban dengan tegangan induksi (Ea ) atau tegangan pada saat tidak berbeban.
Diagram dipengaruhi selain oleh faktor kerja juga oleh besarnya arus jangkar (Ia ) yang mengalir.
Dengan memperhatikan perubahan tegangan V untuk faktor keja yang berbeda-beda,
karakteristik tegangan teminal V terhadap arus jangkar Ia diperlihatkan pada gambar 1.9.
2.2 Pengaturan Tegangan (Regulasi Tegangan)
Pengaturan tegangan adalah perubahan tegangan terminal alternator antara keadaan
beban nol (VNL) dengan beban penuh (VFL). Keadaan ini memberikan gambaran batasan drop
tegangan yang terjadi pada generator, yang dinyatakan sebagai berikut.
Vr=V NLV FLV FL
x100 %
Laboratorium Mesin Listrik







