
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 1
OSK Fisika 2017 Number 1 Kota Medan
GERAK LURUS BERUBAH BERATURAN Sebuah partikel bergerak satu dimensi sepanjang sumbu 𝑥 positif dengan kecepatan 𝑣 dan percepatan 𝑎 yang memenuhi hubungan sebagai berikut: Untuk 0 ≤ 𝑡 ≤ 𝑡1, 𝑎 =
6(𝐾2𝑥)1/3, sedangkan untuk 𝑡 ≥ 𝑡1, 𝑣 = √𝐵2 + 4 𝐴( 𝑥 − 𝐶) , dimana 𝐴, 𝐵, 𝐶 dan 𝐾 suatu tetapan. Mula-mula partikel bergerak dari titik O tanpa kecepatan awal. Selanjutnya, pada saat 𝑡 = 𝑡1, baik pada posisi 𝑥, kecepatan 𝑣 maupun 𝑎 seluruhnya kontinu. a. Tuliskan dimensi 𝐴, 𝐵, 𝐶 dan 𝐾. b. Tuliskan nilai 𝐴𝐵/(𝐶𝐾). Pembahasan : a. Dimensi 𝑥, 𝑣, dan 𝑎 adalah
[𝑥] = [𝐿] [𝑣] = [𝐿][𝑇]−1 [𝑎] = [𝐿][𝑇]−2 𝑎 = 6(𝐾2𝑥)1/3 𝑎3 = 216𝐾2𝑥
𝐾 =1
6√6𝑎3/2𝑥−1/2
[𝐾] = [𝑎]3/2[𝑥]−1/2
[𝐾] = [𝐿]3 2⁄ [𝑇]−3[𝐿]−1/2 ⟹ [𝐾] = [𝐿][𝑇]−3
𝑣 = √𝐵2 + 4 𝐴( 𝑥 − 𝐶) 𝑣2 = 𝐵2 + 4 𝐴( 𝑥 − 𝐶)
[𝑣] = [𝐵] ⟹ [𝐵] = [𝐿][𝑇]−1
[𝑥] = [𝐶] ⟹ [𝐶] = [𝐿]
[𝑣]2 = [𝐴][𝑥] ⟹ [𝐴] = [𝐿][𝑇]−3
b. Kita tinjau gerak partikel untuk selang waktu 0 ≤ 𝑡 ≤ 𝑡1
𝑎 = 6(𝐾2𝑥)13
𝑎 = 6𝐾2/3𝑥1/3 … (1)
Percepatan adalah turunan pertama kecepatan terhadap waktu 𝑎 = 𝑑𝑣
𝑑𝑡
𝑑𝑣
𝑑𝑡
𝑑𝑥
𝑑𝑥 = 6𝐾2/3𝑥1/3
𝑣𝑑𝑣
𝑑𝑥 = 6𝐾2/3𝑥1/3
𝑣𝑑𝑣 = 6𝐾2/3𝑥1/3𝑑𝑥 Pada saat awal (𝑡 = 0) partikel diam (𝑣 = 0) dan berada di titik O (𝑥 = 0). Kita integralkan menggunakan syarat ini
∫ 𝑣𝑑𝑣𝑣
0
= 6𝐾2/3 ∫ 𝑥1/3𝑑𝑥𝑥
0
1
2𝑣2 = 6𝐾2/3 (
3
4) 𝑥4/3
𝑣2 = 9𝐾2/3𝑥4/3 𝑣 = 3𝐾1/3𝑥2/3 … (2)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 2
kecepatan adalah turunan pertama posisi terhadap waktu 𝑣 = 𝑑𝑥
𝑑𝑡
𝑑𝑥
𝑑𝑡= 3𝐾1/3𝑥2/3
𝑥−2/3𝑑𝑥 = 3𝐾1/3𝑑𝑡 Kita integralkan menggunakan syarat sebelumnya yaitu pada saat awal (𝑡 = 0) partikel berada di titik O (𝑥 = 0).
∫ 𝑥−2/3𝑑𝑥𝑥
0
= 3𝐾1/3 ∫ 𝑑𝑡𝑡
0
3𝑥1/3 = 3𝐾1/3𝑡 𝑥 = 𝐾𝑡3 … (3) Ketika 𝑡 = 𝑡1 posisi partikel adalah 𝑥(𝑡1) = 𝐾𝑡1
3 … (4) Subtitusi persamaan (4) ke (1) untuk mendapatkan percepatan partikel ketika 𝑡 = 𝑡1 𝑎(𝑡1) = 6𝐾2/3(𝐾𝑡1
3)1/3 𝑎(𝑡1) = 6𝐾𝑡1 … (5) Subtitusi persamaan (4) ke (2) untuk mendapatkan kecepatan partikel ketika 𝑡 = 𝑡1 𝑣(𝑡1) = 3𝐾1/3(𝐾𝑡1
3)2/3 𝑣(𝑡1) = 3𝐾𝑡1
2 … (6) Selanjtunya kita tinjau gerak partikel ketika 𝑡 ≥ 𝑡1. Pada selang ini kecepatan partikel adalah
𝑣 = √𝐵2 + 4 𝐴( 𝑥 − 𝐶) 𝑣2 = 𝐵2 + 4 𝐴( 𝑥 − 𝐶) Persamaan di atas analog dengan persamaan gerak lurus berubah beraturan atau GLBB yang berbentuk 𝑣2 = 𝑣0
2 + 2𝑎( 𝑥 − 𝑥0) Dengan 𝑣0 = 𝐵, 𝑎 = 2𝐴, dan 𝑥0 = 𝐶 adalah kecepatan awal, percepatan, posisi awal partikel pada selang 𝑡 ≥ 𝑡1. Pada saat awal di selang ini adalah ketika 𝑡 = 𝑡1. Karena pada saat 𝑡 = 𝑡1 posisi 𝑥, kecepatan 𝑣, dan percepatan 𝑎 seluruhnya kontinu maka akan berlaku 𝑥(𝑡1) = 𝑥0 ⟹ 𝐶 = 𝐾𝑡1
3 𝑣(𝑡1) = 𝑣0 ⟹ 𝐵 = 3𝐾𝑡1
2 𝑎(𝑡1) = 𝑎 ⟹ 𝐴 = 3𝐾𝑡1 Maka nilai 𝐴𝐵/(𝐶𝐾) adalah
𝐴𝐵
𝐶𝐾=
(3𝐾𝑡1)(3𝐾𝑡12)
(𝐾𝑡13)𝐾
⟹𝐴𝐵
𝐶𝐾= 9
OSK Fisika 2017 Number 2 Kota Medan
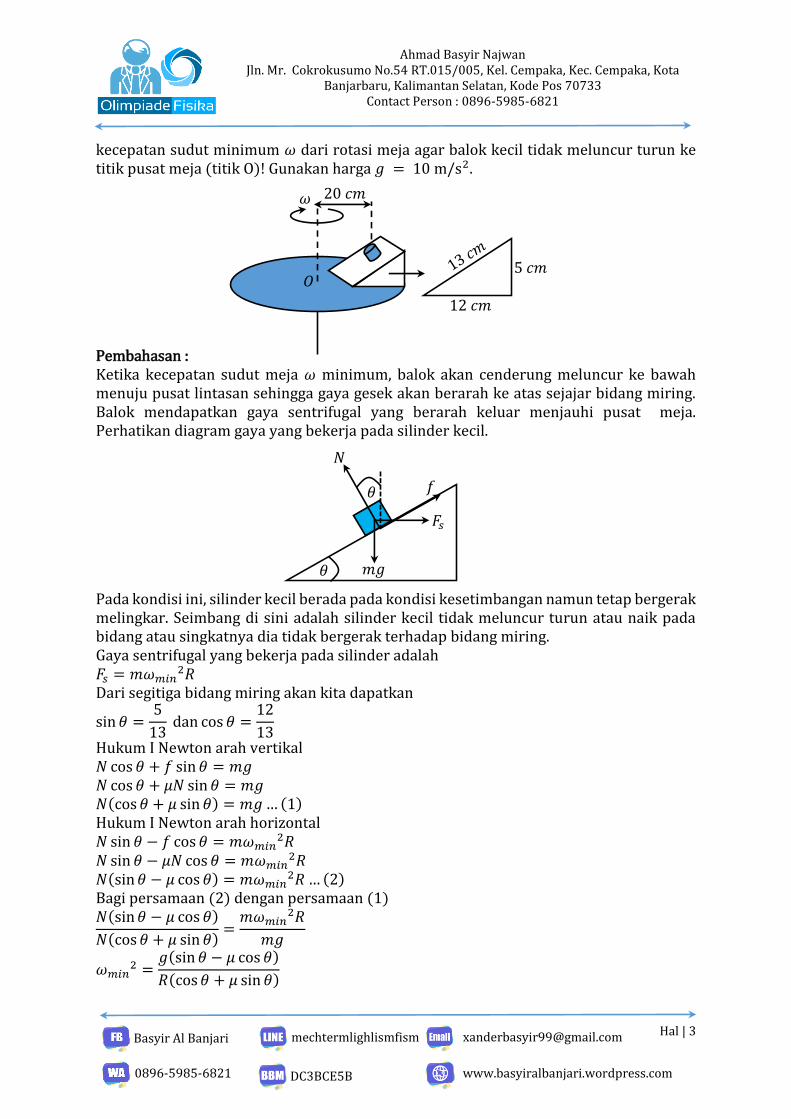
SISTEM MASSA DAN SEGITIGA PADA PIRINGAN BERPUTAR Sebuah bidang miring berbentuk segitiga siku-siku (dengan sisi 5 cm, 12 cm, 13 cm) melekat di atas meja. Sebuah silinder kecil berdiam di atas bidang miring tersebut. Koefisien gesek statik antara bidang miring dan balok adalah 𝜇 = 1/3. Posisi balok dipertahankan pada jarak 20 cm dari pusat meja rotasi (lihat gambar!). Tentukan
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 3
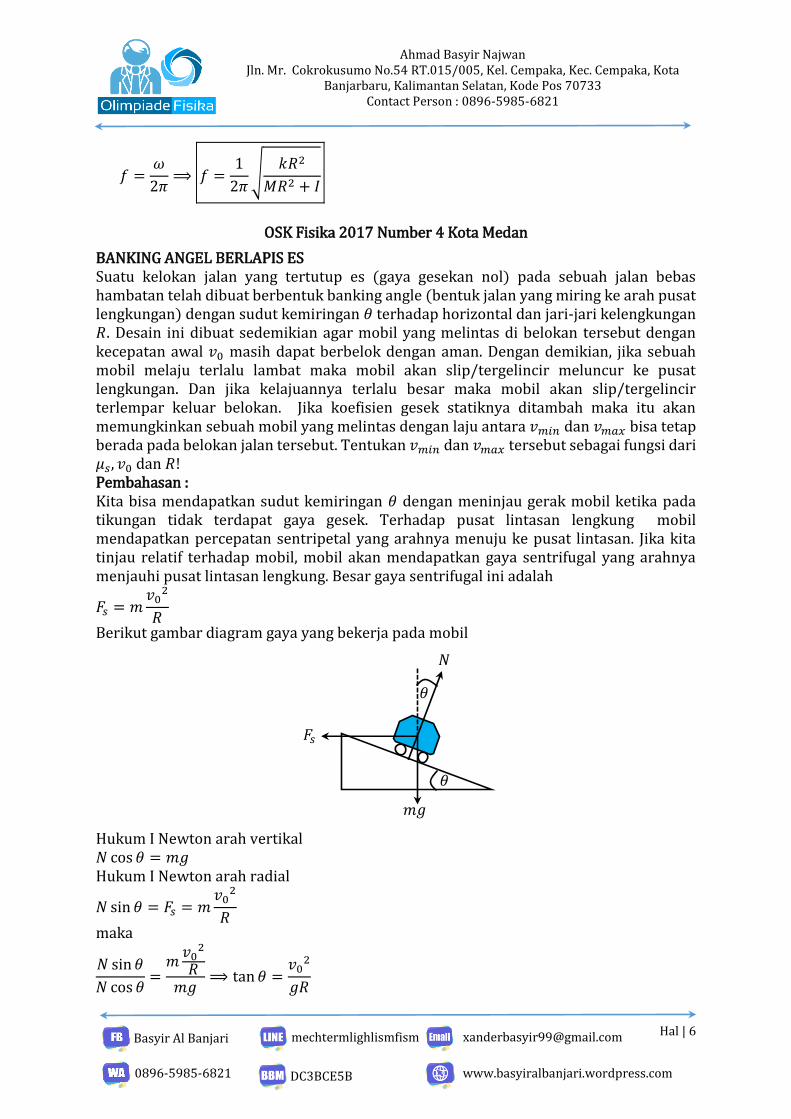
kecepatan sudut minimum 𝜔 dari rotasi meja agar balok kecil tidak meluncur turun ke titik pusat meja (titik O)! Gunakan harga 𝑔 = 10 m/s2. Pembahasan : Ketika kecepatan sudut meja 𝜔 minimum, balok akan cenderung meluncur ke bawah menuju pusat lintasan sehingga gaya gesek akan berarah ke atas sejajar bidang miring. Balok mendapatkan gaya sentrifugal yang berarah keluar menjauhi pusat meja. Perhatikan diagram gaya yang bekerja pada silinder kecil. Pada kondisi ini, silinder kecil berada pada kondisi kesetimbangan namun tetap bergerak melingkar. Seimbang di sini adalah silinder kecil tidak meluncur turun atau naik pada bidang atau singkatnya dia tidak bergerak terhadap bidang miring. Gaya sentrifugal yang bekerja pada silinder adalah 𝐹𝑠 = 𝑚𝜔𝑚𝑖𝑛
2𝑅 Dari segitiga bidang miring akan kita dapatkan
sin 𝜃 =5
13 dan cos 𝜃 =
12
13
Hukum I Newton arah vertikal 𝑁 cos 𝜃 + 𝑓 sin 𝜃 = 𝑚𝑔 𝑁 cos 𝜃 + 𝜇𝑁 sin 𝜃 = 𝑚𝑔 𝑁(cos 𝜃 + 𝜇 sin 𝜃) = 𝑚𝑔 … (1) Hukum I Newton arah horizontal 𝑁 sin 𝜃 − 𝑓 cos 𝜃 = 𝑚𝜔𝑚𝑖𝑛
2𝑅 𝑁 sin 𝜃 − 𝜇𝑁 cos 𝜃 = 𝑚𝜔𝑚𝑖𝑛
2𝑅 𝑁(sin 𝜃 − 𝜇 cos 𝜃) = 𝑚𝜔𝑚𝑖𝑛
2𝑅 … (2) Bagi persamaan (2) dengan persamaan (1) 𝑁(sin 𝜃 − 𝜇 cos 𝜃)
𝑁(cos 𝜃 + 𝜇 sin 𝜃)=
𝑚𝜔𝑚𝑖𝑛2𝑅
𝑚𝑔
𝜔𝑚𝑖𝑛2 =
𝑔(sin 𝜃 − 𝜇 cos 𝜃)
𝑅(cos 𝜃 + 𝜇 sin 𝜃)
5 𝑐𝑚
12 𝑐𝑚
20 𝑐𝑚 𝜔
𝑂
𝐹𝑠
𝑚𝑔
𝑁
𝜃
𝜃 𝑓

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 4
𝜔𝑚𝑖𝑛 = √𝑔(sin 𝜃 − 𝜇 cos 𝜃)
𝑅(cos 𝜃 + 𝜇 sin 𝜃)
Subtitusi nilai 𝑔 = 10 m/s2, 𝑅 = 0,2 m, , 𝜇 = 1/3, sin 𝜃 = 5/13, dan cos 𝜃 = 12/13
𝜔𝑚𝑖𝑛 = √10((5/13) − (1/3)(12/13))
0,2((12/13) + (1/3)(5/13))
𝜔𝑚𝑖𝑛 = √150
41
𝜔𝑚𝑖𝑛 = 1,91 rad/s
OSK Fisika 2017 Number 3 Kota Medan
OSILASI DI ATAS LANTAI Sebuah piringan homogen dengan massa 𝑀 dan momen inersia 𝐼 menggelinding tanpa slip di atas permukaan datar. Suatu gaya tarik menarik dengan besar 𝐹 = − 𝑘𝑟−𝑛 bekerja pada piringan tersebut antara titik pusat silinder dengan sebuah titik tetap sejauh 𝐷 dari titik pusat silinder (lihat gambar). Dengan syarat bahwa 𝑘 > 0 dan |𝑥/𝐷| << 1, tentukan: a. nilai n yang menyebabkan terjadinya osilasi stabil piringan tersebut. b. frekuensi osilasi kecil tersebut.
Pembahasan : a. Posisi kesetimbangan sistem terjadi ketika 𝑥 = 0. Kita tinjau sistem ketika piringan
disimpangkan sejauh 𝑥 dari posisi kesetimbangannya kemudian dilepaskan tanpa kecepatan awal. Piringan akan cenderung bergerak ke kanan (kembali ke posisi kesetimbangan) akibat adanya gaya tarik 𝐹 = − 𝑘𝑟−𝑛. Pada piringan juga bekerja gaya gesek yang berarah ke kiri sehingga piringan berotasi. Karena silinder menggelinding tanpa slip akan berlaku 𝐴 = 𝛼𝑅 (𝜓 dibaca psi)
𝐷
𝑥
𝑟
𝑎

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 5
Hukum II Newton untuk gerak piringan arah horizontal 𝐹 sin 𝜓 − 𝑓 = 𝑀𝐴 𝑘𝑟−𝑛 sin 𝜓 − 𝑓 = 𝑀𝐴 … (1) Hukum II Newton untuk gerak rotasi piringan
𝑓𝑅 = 𝐼𝛼 ⟹ 𝑓 =𝐼𝐴
𝑅2… (2)
Dari gambar akan kita dapatkan bahwa
sin 𝜓 =𝑥
𝑟… (3)
Subtitusi persamaan (2) dan (3) ke (1)
𝑘𝑟−𝑛𝑥
𝑟−
𝐼𝐴
𝑅2= 𝑀𝐴
𝑘𝑟−(𝑛+1)𝑥 =𝑀𝑅2 + 𝐼
𝑅2𝐴
Simpangan berarah ke kiri sedangkan piringan dipercepat ke kanan maka
𝐴 = −𝑑2𝑥
𝑑𝑡2
𝑘𝑟−(𝑛+1)𝑥 =𝑀𝑅2 + 𝐼
𝑅2(−
𝑑2𝑥
𝑑𝑡2)
𝑑2𝑥
𝑑𝑡2+
𝑘𝑟−(𝑛+1)𝑅2
𝑀𝑅2 + 𝐼 𝑥 = 0
Agar osilasi piringan stabil, suku 𝑘𝑟−(𝑛+1)𝑅2
𝑀𝑅2 + 𝐼 haruslah konstan atau 𝑟−(𝑛+1) = 1
𝑟−(𝑛+1) = 𝑟0 ⟹ −(𝑛 + 1) = 0 ⟹ 𝑛 = −1
nilai 𝑛 agar terjadi osilasi stabil adalah𝑛 = −1
b. Untuk 𝑛 = −1, persamaan gerak sistem akan menjadi
𝑑2𝑥
𝑑𝑡2+
𝑘𝑅2
𝑀𝑅2 + 𝐼 𝑥 = 0 ⟹ 𝜔 = √
𝑘𝑅2
𝑀𝑅2 + 𝐼
Frekuensi osilasi kecil sistem ini adalah
𝐷
𝑥
𝑟
𝑎
𝜓
𝐹
𝜓
𝐴 𝛼
𝑓
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 6
𝑓 =𝜔
2𝜋⟹ 𝑓 =
1
2𝜋√
𝑘𝑅2
𝑀𝑅2 + 𝐼
OSK Fisika 2017 Number 4 Kota Medan
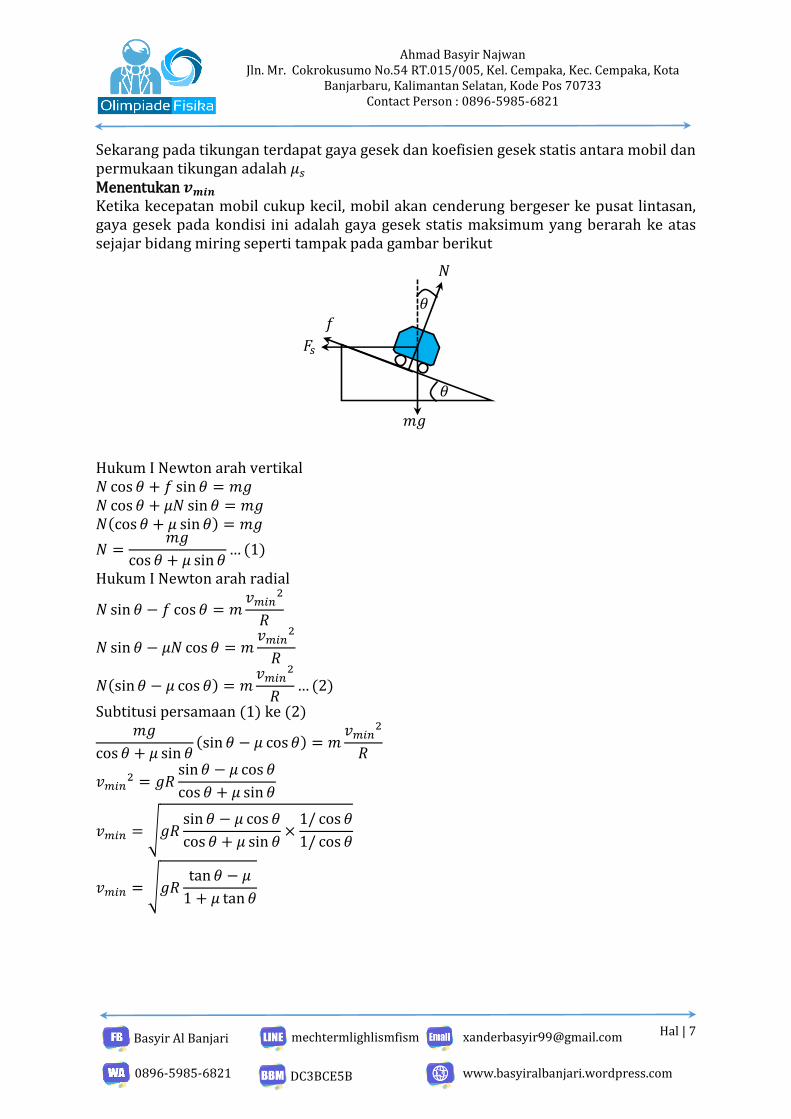
BANKING ANGEL BERLAPIS ES Suatu kelokan jalan yang tertutup es (gaya gesekan nol) pada sebuah jalan bebas hambatan telah dibuat berbentuk banking angle (bentuk jalan yang miring ke arah pusat lengkungan) dengan sudut kemiringan 𝜃 terhadap horizontal dan jari-jari kelengkungan 𝑅. Desain ini dibuat sedemikian agar mobil yang melintas di belokan tersebut dengan kecepatan awal 𝑣0 masih dapat berbelok dengan aman. Dengan demikian, jika sebuah mobil melaju terlalu lambat maka mobil akan slip/tergelincir meluncur ke pusat lengkungan. Dan jika kelajuannya terlalu besar maka mobil akan slip/tergelincir terlempar keluar belokan. Jika koefisien gesek statiknya ditambah maka itu akan memungkinkan sebuah mobil yang melintas dengan laju antara 𝑣𝑚𝑖𝑛 dan 𝑣𝑚𝑎𝑥 bisa tetap berada pada belokan jalan tersebut. Tentukan 𝑣𝑚𝑖𝑛 dan 𝑣𝑚𝑎𝑥 tersebut sebagai fungsi dari 𝜇𝑠, 𝑣0 dan 𝑅! Pembahasan : Kita bisa mendapatkan sudut kemiringan 𝜃 dengan meninjau gerak mobil ketika pada tikungan tidak terdapat gaya gesek. Terhadap pusat lintasan lengkung mobil mendapatkan percepatan sentripetal yang arahnya menuju ke pusat lintasan. Jika kita tinjau relatif terhadap mobil, mobil akan mendapatkan gaya sentrifugal yang arahnya menjauhi pusat lintasan lengkung. Besar gaya sentrifugal ini adalah
𝐹𝑠 = 𝑚𝑣0
2
𝑅
Berikut gambar diagram gaya yang bekerja pada mobil Hukum I Newton arah vertikal 𝑁 cos 𝜃 = 𝑚𝑔 Hukum I Newton arah radial
𝑁 sin 𝜃 = 𝐹𝑠 = 𝑚𝑣0
2
𝑅
maka
𝑁 sin 𝜃
𝑁 cos 𝜃=
𝑚𝑣0
2
𝑅𝑚𝑔
⟹ tan 𝜃 =𝑣0
2
𝑔𝑅
𝑚𝑔
𝐹𝑠
𝑁
𝜃
𝜃
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 7
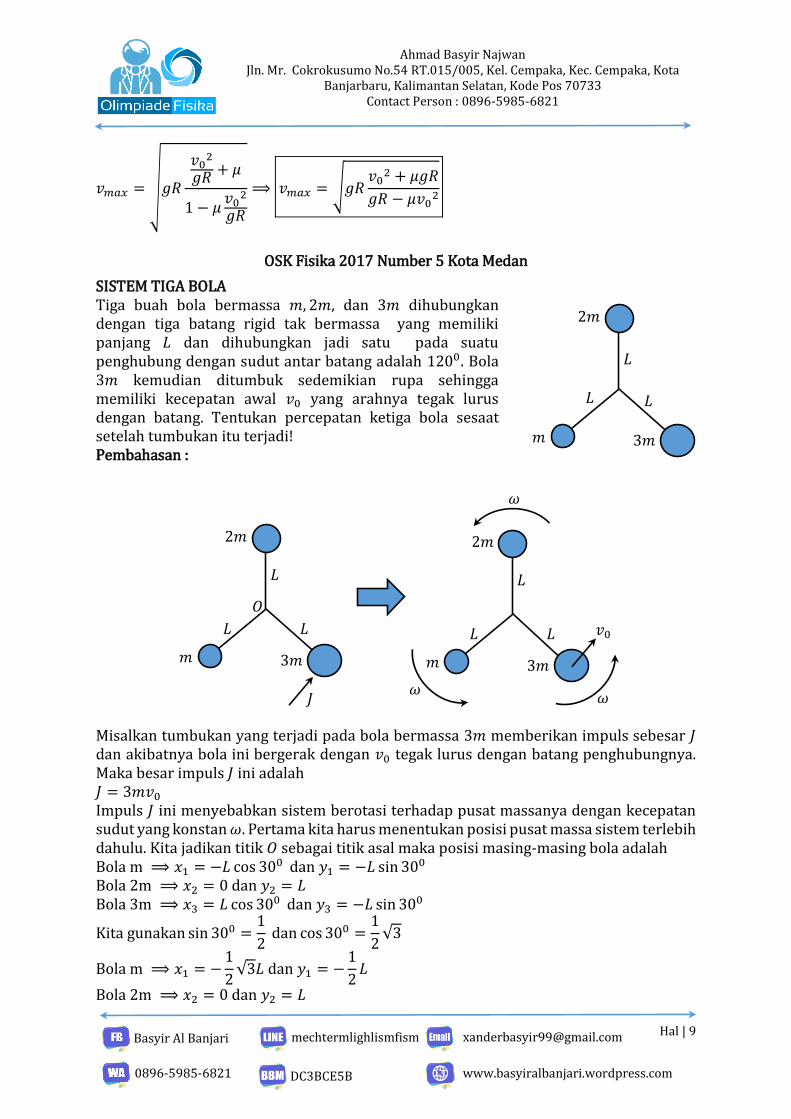
Sekarang pada tikungan terdapat gaya gesek dan koefisien gesek statis antara mobil dan permukaan tikungan adalah 𝜇𝑠 Menentukan 𝒗𝒎𝒊𝒏 Ketika kecepatan mobil cukup kecil, mobil akan cenderung bergeser ke pusat lintasan, gaya gesek pada kondisi ini adalah gaya gesek statis maksimum yang berarah ke atas sejajar bidang miring seperti tampak pada gambar berikut Hukum I Newton arah vertikal 𝑁 cos 𝜃 + 𝑓 sin 𝜃 = 𝑚𝑔 𝑁 cos 𝜃 + 𝜇𝑁 sin 𝜃 = 𝑚𝑔 𝑁(cos 𝜃 + 𝜇 sin 𝜃) = 𝑚𝑔
𝑁 =𝑚𝑔
cos 𝜃 + 𝜇 sin 𝜃… (1)
Hukum I Newton arah radial
𝑁 sin 𝜃 − 𝑓 cos 𝜃 = 𝑚𝑣𝑚𝑖𝑛
2
𝑅
𝑁 sin 𝜃 − 𝜇𝑁 cos 𝜃 = 𝑚𝑣𝑚𝑖𝑛
2
𝑅
𝑁(sin 𝜃 − 𝜇 cos 𝜃) = 𝑚𝑣𝑚𝑖𝑛
2
𝑅… (2)
Subtitusi persamaan (1) ke (2) 𝑚𝑔
cos 𝜃 + 𝜇 sin 𝜃(sin 𝜃 − 𝜇 cos 𝜃) = 𝑚
𝑣𝑚𝑖𝑛2
𝑅
𝑣𝑚𝑖𝑛2 = 𝑔𝑅
sin 𝜃 − 𝜇 cos 𝜃
cos 𝜃 + 𝜇 sin 𝜃
𝑣𝑚𝑖𝑛 = √𝑔𝑅sin 𝜃 − 𝜇 cos 𝜃
cos 𝜃 + 𝜇 sin 𝜃×
1/ cos 𝜃
1/ cos 𝜃
𝑣𝑚𝑖𝑛 = √𝑔𝑅tan 𝜃 − 𝜇
1 + 𝜇 tan 𝜃
𝑚𝑔
𝐹𝑠
𝑁
𝜃
𝜃 𝑓

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 8
𝑣𝑚𝑖𝑛 = √𝑔𝑅
𝑣02
𝑔𝑅 − 𝜇
1 + 𝜇𝑣0
2
𝑔𝑅
⟹ 𝑣𝑚𝑖𝑛 = √𝑔𝑅𝑣0
2 − 𝜇𝑔𝑅
𝑔𝑅 + 𝜇𝑣02
Menentukan 𝒗𝒎𝒂𝒙 Ketika kecepatan mobil cukup besar, mobil akan cenderung bergeser menjauhi pusat lintasan, gaya gesek pada kondisi ini adalah gaya gesek statis maksimum yang berarah ke bawah sejajar bidang miring seperti tampak pada gambar berikut Hukum I Newton arah vertikal 𝑁 cos 𝜃 − 𝑓 sin 𝜃 = 𝑚𝑔 𝑁 cos 𝜃 − 𝜇𝑁 sin 𝜃 = 𝑚𝑔 𝑁(cos 𝜃 − 𝜇 sin 𝜃) = 𝑚𝑔
𝑁 =𝑚𝑔
cos 𝜃 − 𝜇 sin 𝜃… (3)
Hukum I Newton arah radial
𝑁 sin 𝜃 + 𝑓 cos 𝜃 = 𝑚𝑣𝑚𝑎𝑥
2
𝑅
𝑁 sin 𝜃 + 𝜇𝑁 cos 𝜃 = 𝑚𝑣𝑚𝑎𝑥
2
𝑅
𝑁(sin 𝜃 + 𝜇 cos 𝜃) = 𝑚𝑣𝑚𝑎𝑥
2
𝑅… (4)
Subtitusi persamaan (3) ke (4) 𝑚𝑔
cos 𝜃 − 𝜇 sin 𝜃(sin 𝜃 + cos 𝜃) = 𝑚
𝑣𝑚𝑎𝑥2
𝑅
𝑣𝑚𝑎𝑥2 = 𝑔𝑅
sin 𝜃 + 𝜇 cos 𝜃
cos 𝜃 − 𝜇 sin 𝜃
𝑣𝑚𝑎𝑥 = √𝑔𝑅sin 𝜃 + 𝜇 cos 𝜃
cos 𝜃 − 𝜇 sin 𝜃×
1/ cos 𝜃
1/ cos 𝜃
𝑣𝑚𝑎𝑥 = √𝑔𝑅tan 𝜃 + 𝜇
1 − 𝜇 tan 𝜃
𝑚𝑔
𝐹𝑠
𝑁
𝜃
𝜃
𝑓
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 9
𝑣𝑚𝑎𝑥 = √𝑔𝑅
𝑣02
𝑔𝑅 + 𝜇
1 − 𝜇𝑣0
2
𝑔𝑅
⟹ 𝑣𝑚𝑎𝑥 = √𝑔𝑅𝑣0
2 + 𝜇𝑔𝑅
𝑔𝑅 − 𝜇𝑣02
OSK Fisika 2017 Number 5 Kota Medan
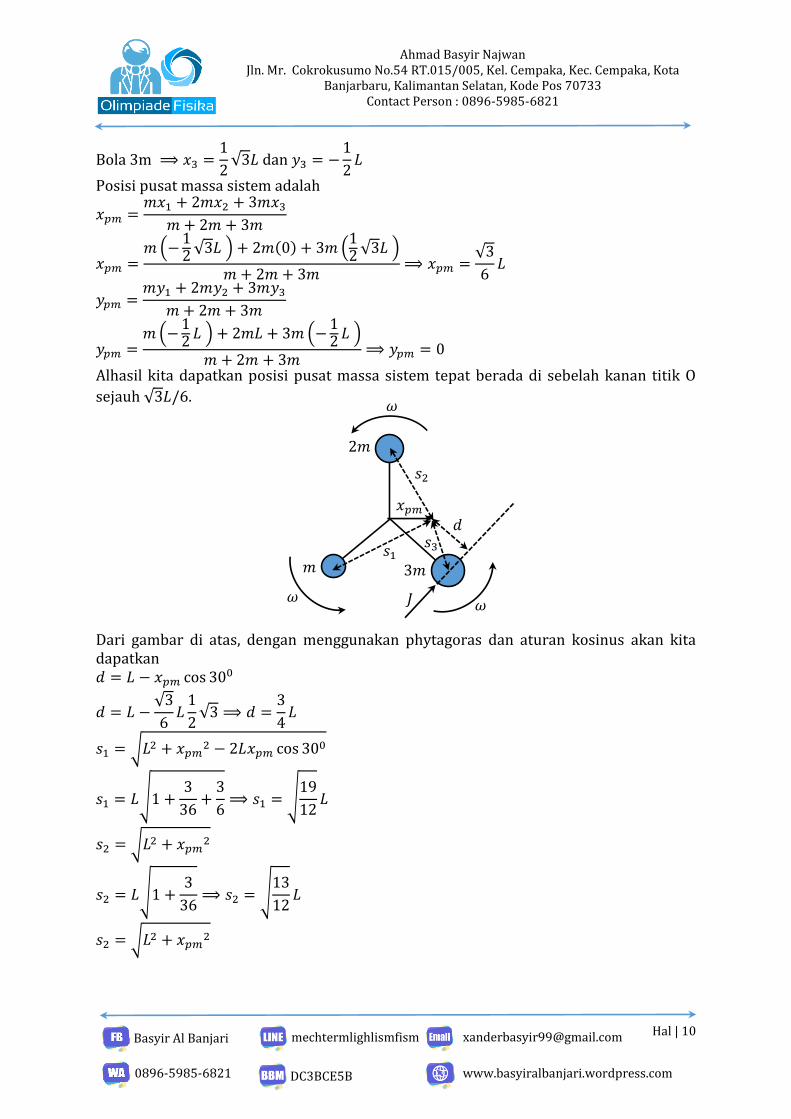
SISTEM TIGA BOLA Tiga buah bola bermassa 𝑚, 2𝑚, dan 3𝑚 dihubungkan dengan tiga batang rigid tak bermassa yang memiliki panjang 𝐿 dan dihubungkan jadi satu pada suatu penghubung dengan sudut antar batang adalah 1200. Bola 3𝑚 kemudian ditumbuk sedemikian rupa sehingga memiliki kecepatan awal 𝑣0 yang arahnya tegak lurus dengan batang. Tentukan percepatan ketiga bola sesaat setelah tumbukan itu terjadi! Pembahasan : Misalkan tumbukan yang terjadi pada bola bermassa 3𝑚 memberikan impuls sebesar 𝐽 dan akibatnya bola ini bergerak dengan 𝑣0 tegak lurus dengan batang penghubungnya. Maka besar impuls 𝐽 ini adalah 𝐽 = 3𝑚𝑣0
Impuls 𝐽 ini menyebabkan sistem berotasi terhadap pusat massanya dengan kecepatan sudut yang konstan 𝜔. Pertama kita harus menentukan posisi pusat massa sistem terlebih dahulu. Kita jadikan titik 𝑂 sebagai titik asal maka posisi masing-masing bola adalah Bola m ⟹ 𝑥1 = −𝐿 cos 300 dan 𝑦1 = −𝐿 sin 300 Bola 2m ⟹ 𝑥2 = 0 dan 𝑦2 = 𝐿 Bola 3m ⟹ 𝑥3 = 𝐿 cos 300 dan 𝑦3 = −𝐿 sin 300
Kita gunakan sin 300 =1
2 dan cos 300 =
1
2√3
Bola m ⟹ 𝑥1 = −1
2√3𝐿 dan 𝑦1 = −
1
2𝐿
Bola 2m ⟹ 𝑥2 = 0 dan 𝑦2 = 𝐿
𝐿 𝐿
𝐿
3𝑚
2𝑚
𝑚
𝐿 𝐿
𝐿
3𝑚
2𝑚
𝑚
𝑣0
𝜔 𝜔
𝜔
𝐿 𝐿
𝐿
3𝑚
2𝑚
𝑚
𝐽
𝑂
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 10
Bola 3m ⟹ 𝑥3 =1
2√3𝐿 dan 𝑦3 = −
1
2𝐿
Posisi pusat massa sistem adalah
𝑥𝑝𝑚 =𝑚𝑥1 + 2𝑚𝑥2 + 3𝑚𝑥3
𝑚 + 2𝑚 + 3𝑚
𝑥𝑝𝑚 =𝑚 (−
12 √3𝐿 ) + 2𝑚(0) + 3𝑚 (
12 √3𝐿 )
𝑚 + 2𝑚 + 3𝑚⟹ 𝑥𝑝𝑚 =
√3
6𝐿
𝑦𝑝𝑚 =𝑚𝑦1 + 2𝑚𝑦2 + 3𝑚𝑦3
𝑚 + 2𝑚 + 3𝑚
𝑦𝑝𝑚 =𝑚 (−
12
𝐿 ) + 2𝑚𝐿 + 3𝑚 (−12
𝐿 )
𝑚 + 2𝑚 + 3𝑚⟹ 𝑦𝑝𝑚 = 0
Alhasil kita dapatkan posisi pusat massa sistem tepat berada di sebelah kanan titik O
sejauh √3𝐿/6. Dari gambar di atas, dengan menggunakan phytagoras dan aturan kosinus akan kita dapatkan 𝑑 = 𝐿 − 𝑥𝑝𝑚 cos 300
𝑑 = 𝐿 −√3
6𝐿
1
2√3 ⟹ 𝑑 =
3
4𝐿
𝑠1 = √𝐿2 + 𝑥𝑝𝑚2 − 2𝐿𝑥𝑝𝑚 cos 300
𝑠1 = 𝐿√1 +3
36+
3
6⟹ 𝑠1 = √
19
12𝐿
𝑠2 = √𝐿2 + 𝑥𝑝𝑚2
𝑠2 = 𝐿√1 +3
36⟹ 𝑠2 = √
13
12𝐿
𝑠2 = √𝐿2 + 𝑥𝑝𝑚2
3𝑚
2𝑚
𝑚
𝜔 𝜔
𝜔
𝑥𝑝𝑚
𝐽
𝑑
𝑠2
𝑠1 𝑠3

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 11
𝑠2 = 𝐿√1 +3
36⟹ 𝑠2 = √
13
12𝐿
𝑠3 = √𝐿2 + 𝑥𝑝𝑚2 − 2𝐿𝑥𝑝𝑚 cos 300
𝑠3 = 𝐿√1 +3
36−
3
6⟹ 𝑠3 = √
7
12
Momen inersia sistem terhadap titik O adalah 𝐼0 = 𝑚𝐿2 + 2𝑚𝐿2 + 3𝑚𝐿2 ⟹ 𝐼0 = 6𝑚𝐿2 Dengan menggunakan teorema sumbu sejajar akan kita dapatkan momen inersia sistem terhadap pusat massanya 𝐼𝑝𝑚 = 𝐼0 + 6𝑚𝑥𝑝𝑚
2
𝐼𝑝𝑚 = 6𝑚𝐿2 + 6𝑚 (√3
6)
2
⟹ 𝐼𝑝𝑚 =13
2𝑚𝐿2
Tinjau perubahan momentum sudut sistem akibat impuls sudut 𝐽𝑑 𝐽𝑑 = 𝐼𝑝𝑚𝜔
(3𝑚𝑣0) (3
4𝐿) = (
13
2𝑚𝐿2) 𝜔 ⟹ 𝜔 =
9𝑣0
26𝐿
Impuls 𝐽 ini hanya membuat pusat massa sistem bergerak dengan kecepatan konstan sehingga pusat massa sistem tidak dipercepat. Relatif terhadap pusat massa sistem, setiap bola memiliki percepatan sentripetal masing-masing yang besarnya adalah 𝜔2𝑠 dengan 𝑠 adalah jarak masing-masing bola ke pusat massanya. Percepatan Bola bermassa 𝑚
𝑎1 = 𝜔2𝑠1 = (9𝑣0
26𝐿)
2
√19
12𝐿 ⟹ 𝑎1 =
81
1352√
19
3
𝑣02
𝐿
Percepatan Bola bermassa 2𝑚
𝑎2 = 𝜔2𝑠2 = (9𝑣0
26𝐿)
2
√13
12𝐿 ⟹ 𝑎2 =
81
1352√
13
3
𝑣02
𝐿
Percepatan Bola bermassa 3𝑚
𝑎3 = 𝜔2𝑠3 = (9𝑣0
26𝐿)
2
√7
12𝐿 ⟹ 𝑎3 =
81
1352√
7
3
𝑣02
𝐿
OSK Fisika 2017 Number 6 Kota Medan
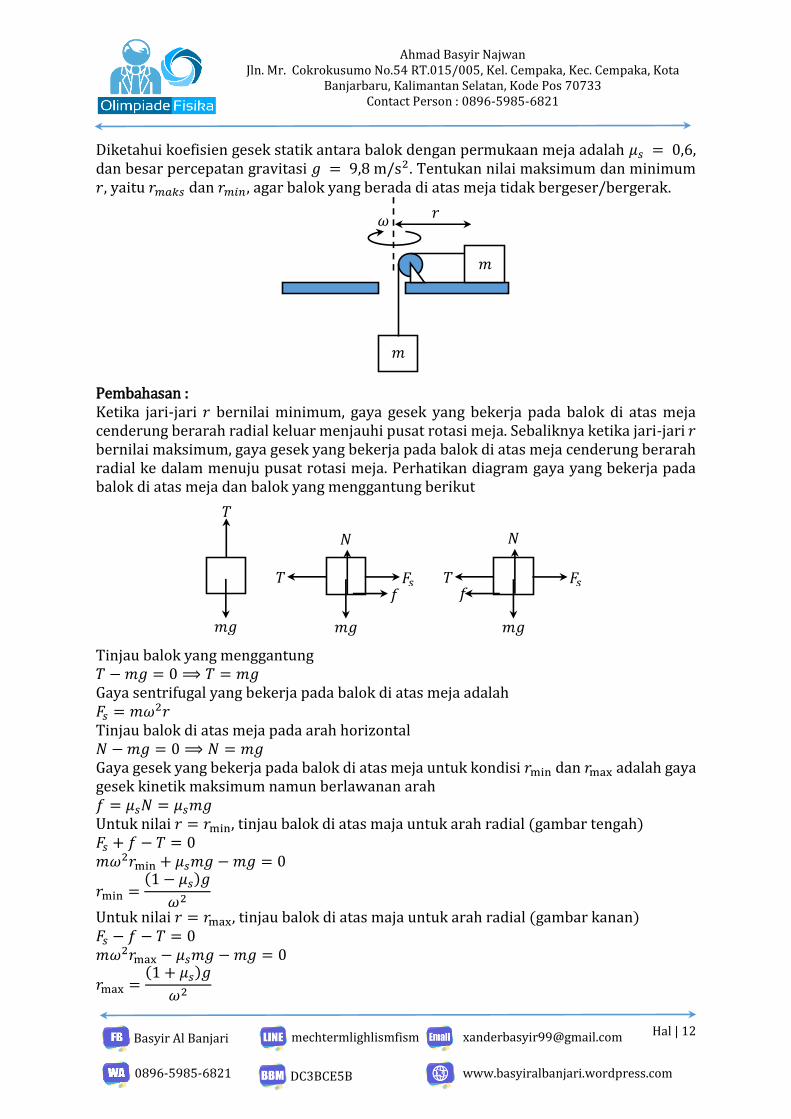
KESEIMBANGAN DI ATAS MEJA BERPUTAR Gambar di bawah ini memperlihatkan dua balok kecil dengan massa sama (𝑚) yang keduanya dihubungkan dengan seutas tali ringan yang tidak dapat molor. Salah satu balok berada di atas meja pada posisi radial sejauh 𝑟 dari pusat sebuah meja datar yang diputar dengan kecepatan sudut konstan 𝜔 = 5 rad/s, sementara balok lainnya tergantung di bawah meja dengan tali penghubung kedua balok melewati sebuah katrol.
Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 12
Diketahui koefisien gesek statik antara balok dengan permukaan meja adalah 𝜇𝑠 = 0,6, dan besar percepatan gravitasi 𝑔 = 9,8 m/s2. Tentukan nilai maksimum dan minimum 𝑟, yaitu 𝑟𝑚𝑎𝑘𝑠 dan 𝑟𝑚𝑖𝑛, agar balok yang berada di atas meja tidak bergeser/bergerak. Pembahasan : Ketika jari-jari 𝑟 bernilai minimum, gaya gesek yang bekerja pada balok di atas meja cenderung berarah radial keluar menjauhi pusat rotasi meja. Sebaliknya ketika jari-jari 𝑟 bernilai maksimum, gaya gesek yang bekerja pada balok di atas meja cenderung berarah radial ke dalam menuju pusat rotasi meja. Perhatikan diagram gaya yang bekerja pada balok di atas meja dan balok yang menggantung berikut Tinjau balok yang menggantung 𝑇 − 𝑚𝑔 = 0 ⟹ 𝑇 = 𝑚𝑔 Gaya sentrifugal yang bekerja pada balok di atas meja adalah 𝐹𝑠 = 𝑚𝜔2𝑟 Tinjau balok di atas meja pada arah horizontal 𝑁 − 𝑚𝑔 = 0 ⟹ 𝑁 = 𝑚𝑔 Gaya gesek yang bekerja pada balok di atas meja untuk kondisi 𝑟min dan 𝑟max adalah gaya gesek kinetik maksimum namun berlawanan arah 𝑓 = 𝜇𝑠𝑁 = 𝜇𝑠𝑚𝑔 Untuk nilai 𝑟 = 𝑟min, tinjau balok di atas maja untuk arah radial (gambar tengah) 𝐹𝑠 + 𝑓 − 𝑇 = 0 𝑚𝜔2𝑟min + 𝜇𝑠𝑚𝑔 − 𝑚𝑔 = 0
𝑟min =(1 − 𝜇𝑠)𝑔
𝜔2
Untuk nilai 𝑟 = 𝑟max, tinjau balok di atas maja untuk arah radial (gambar kanan) 𝐹𝑠 − 𝑓 − 𝑇 = 0 𝑚𝜔2𝑟max − 𝜇𝑠𝑚𝑔 − 𝑚𝑔 = 0
𝑟max =(1 + 𝜇𝑠)𝑔
𝜔2
𝑟 𝜔
𝑚
𝑚
𝑇
𝑚𝑔
𝑇
𝑚𝑔
𝐹𝑠 𝑓
𝑁
𝑇
𝑚𝑔
𝐹𝑠 𝑓
𝑁

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 13
Dengan mensubtitusi nilai-nilai yang diketahui akan kita dapatkan
𝑟min =(1 − 0,6)9,8
52⟹ 𝑟min = 0,16 m
𝑟max =(1 + 0,6)9,8
52⟹ 𝑟max = 0,63 m
OSK Fisika 2017 Number 7 Kota Medan
SILINDER DI ATAS BIDANG MIRING Pada sistem di bawah ini, benda berupa silinder dengan jari-jari luar 𝑅, jari-jari dalam 𝑟 terletak pada bidang miring. Sedangkan massa yang tergantung adalah silinder yang juga berjari-jari 𝑟. Abikan massa katrol pada bidang miring. Gunakan momen inersia silinder 1/2 𝑀𝑅2. Tinjau kasus bidang miring licin. Tentukan percepatan 𝑚 terhadap bumi. Pembahasan : Perhatikan gambar di bawah ini! Percepatan pusat massa silinder 𝑀 terhadap tanah adalah 𝑎𝑀 Percepatan sudut silinder 𝑀 terhadap tanah adalah 𝛼𝑀 Percepatan pusat massa silinder 𝑚 terhadap tanah adalah 𝑎𝑚 Percepatan sudut silinder 𝑚 terhadap tanah adalah 𝛼𝑚
Hukum II Newton Untuk gerak silinder 𝑀
Translasi
𝑀𝑔 sin 𝜃 − 𝑇 = 𝑀𝑎𝑀 … (1)
𝑀
𝑅
𝑚
𝜃
𝑟
𝑟
𝑀
𝑅
𝑚
𝜃
𝑟
𝑟
𝑚𝑔
𝑀𝑔
𝑇 𝑇
𝑎𝑚
𝑁
𝛼𝑚
𝛼𝑀

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 14
Rotasi
𝑇𝑟 =1
2𝑀𝑅2𝛼𝑀 ⟹ 𝑇 =
1
2𝑟𝑀𝑅2𝛼𝑀 … (2)
Hukum II Newton Untuk gerak silinder 𝑚
Translasi
𝑚𝑔 − 𝑇 = 𝑚𝑎𝑚 … (3)
Rotasi
𝑇𝑟 =1
2𝑚𝑟2𝛼𝑚 ⟹ 𝑇 =
1
2𝑚𝑟𝛼𝑚 … (4)
Jika diperhatikan percepatan silinder 𝑚 adalah percepatan tali ditambah percepatan pusat massa silinder 𝑚 terhadap tali yang besarnya adalah 𝛼𝑚𝑟 (silider 𝑚 dapat dianggap menggelinding tanpa silip pada tali). Sekarang berapa nilai percepatan tali. Kita amati silinder 𝑀. Tali dipercepat ke kanan bawah sejajar bidang miring dengan percepatan 𝑎𝑀 namun juga dipercepat ke kiri atas sejajar bidang miring dengan percepatan 𝛼𝑀𝑟. Jika kita asumsikan tali lebih cenderung bergerak ke kiri atas atau nilai 𝛼𝑀𝑟 > 𝑎𝑀 maka percepatannnya adalah 𝑎𝑡𝑎𝑙𝑖 = 𝛼𝑀𝑟 − 𝑎𝑀 dan jika pun sebaliknya yaitu tali lebih cenderung bergerak ke kanan bawah atau nilai 𝛼𝑀𝑟 < 𝑎𝑀 maka percepatannya adalah 𝑎𝑡𝑎𝑙𝑖 = 𝑎𝑀 − 𝛼𝑀𝑟. Jika kita hubungkan dengan percepatan silinder 𝑚 akan menjadi
Untuk asumsi pertama 𝛼𝑀𝑟 > 𝑎𝑀 (arah percepatan tali searah dengan percepatan silinder 𝑚)
𝑎𝑚 = 𝛼𝑚𝑟 + 𝑎𝑡𝑎𝑙𝑖 = 𝛼𝑚𝑟 + 𝛼𝑀𝑟 − 𝑎𝑀
Untuk asumsi kedua 𝛼𝑀𝑟 < 𝑎𝑀 (arah percepatan tali berlawanan arah dengan percepatan silinder 𝑚)
𝑎𝑚 = 𝛼𝑚𝑟 − 𝑎𝑡𝑎𝑙𝑖 = 𝛼𝑚𝑟 − (𝑎𝑀 − 𝛼𝑀𝑟) = 𝛼𝑚𝑟 + 𝛼𝑀𝑟 − 𝑎𝑀
Dan hasilnya sama saja, jadi dapat kita simpulkan hubungan antar percepatannya adalah
𝑎𝑚 = 𝛼𝑚𝑟 + 𝛼𝑀𝑟 − 𝑎𝑀 … (5)
Subtitusi persamaan (4) ke (3)
𝑚𝑔 −1
2𝑚𝑟𝛼𝑚 = 𝑚𝑎𝑚 ⟹ 𝛼𝑚𝑟 = 2𝑔 − 2𝑎𝑚 … (6)
Subtitusi persamaan (2) ke (3)
𝑚𝑔 −1
2𝑟𝑀𝑅2𝛼𝑀 = 𝑚𝑎𝑚 ⟹ 𝛼𝑀𝑟 =
2𝑚𝑟2
𝑀𝑅2(𝑔 − 𝑎𝑚) … (7)
Kurangkan persamaan (1) dengan (3)
𝑀𝑔 sin 𝜃 − 𝑇 = 𝑀𝑎𝑀
𝑚𝑔 − 𝑇 = 𝑚𝑎𝑚
(𝑀 sin 𝜃 − 𝑚)𝑔 = 𝑀𝑎𝑀 − 𝑚𝑎𝑚−
𝑎𝑀 =(𝑀 sin 𝜃 − 𝑚)𝑔 + 𝑚𝑎𝑚
𝑀… (8)

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 15
Subtitusi persamaan (6), (7), dan (8) ke (5)
𝑎𝑚 = 2𝑔 − 2𝑎𝑚 +2𝑚𝑟2
𝑀𝑅2(𝑔 − 𝑎𝑚) −
(𝑀 sin 𝜃 − 𝑚)𝑔 + 𝑚𝑎𝑚
𝑀
𝑀𝑅2𝑎𝑚 = 2𝑀𝑅2𝑔 − 2𝑀𝑅2𝑎𝑚 + 2𝑚𝑟2𝑔 − 2𝑚𝑟2𝑎𝑚 − (𝑀 sin 𝜃 − 𝑚)𝑅2𝑔 − 𝑚𝑅2𝑎𝑚
𝑀𝑅2𝑎𝑚 + 2𝑀𝑅2𝑎𝑚 + 2𝑚𝑟2𝑎𝑚 + 𝑚𝑅2𝑎𝑚 = 2𝑀𝑅2𝑔 + 2𝑚𝑟2𝑔 − (𝑀 sin 𝜃 − 𝑚)𝑅2𝑔
[3𝑀𝑅2 + 𝑚(2𝑟2 + 𝑅2)]𝑎𝑚 = [𝑚(2𝑟2 + 𝑅2) + (2 − sin 𝜃)𝑀𝑅2]𝑔
𝑎𝑚 =𝑚(2𝑟2 + 𝑅2) + (2 − sin 𝜃)𝑀𝑅2
3𝑀𝑅2 + 𝑚(2𝑟2 + 𝑅2)𝑔
OSK Fisika 2017 Number 8 Kota Medan
APLIKASI HUKUM NEWTON Pada sistem di bawah ini, sebuah massa 𝑚1 dihubungkan dengan massa 𝑚3 melalui tali yang dilewatkan pada katrol tak bermassa yang melekat pada bidang miring bermassa 𝑚2 dengan kemiringan 𝜃. Massa 𝑚3 tersebut terletak di atas bidang miring 𝑚2. Permukaan 𝑚3 dan 𝑚2 bersifat licin, demikian pula dengan permukaan 𝑚1 dan 𝑚2 terhadap lantai. Posisi tali yang terhubung pada 𝑚1 sejajar lantai. Anggap tali tak bermassa dan tidak mulur dengan panjang tetap. Percepatan gravitasi 𝑔 ke bawah. Jika panjang tali adalah 𝐿 (lebih pendek dari panjang bidang miring) dan posisi 𝑚3 mula-mula di ujung atas 𝑚2 (menyinggung katrol) kemudian sistem dilepaskan, tentukan waktu ketika 𝑚1 bertumbukan dengan 𝑚2. Pembahasan : Percepatan massa 𝑚1 terhadap tanah adalah 𝑎1 Percepatan massa 𝑚2 terhadap tanah adalah 𝑎2 Percepatan massa 𝑚3 terhadap tanah adalah 𝑎3𝑥 (sumbu 𝑥) dan 𝑎3𝑦 (sumbu 𝑦) Perhatikan diagram gaya pada masing-masing benda di bawah! Pertama kita harus cari nilai 𝑎1 dan 𝑎2.
𝑚1
𝜃
𝑚2
𝑚1
𝑇
𝑎1
𝜃
𝑚2
𝑇
𝑁 𝑎2
𝑇
𝑁 𝑚3𝑔
𝑎3𝑥
𝑇
𝑎3𝑦

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 16
Hukum II Newton untuk masing-masing benda Massa 𝑚1 Arah sumbu 𝑥 𝑇 = 𝑚1𝑎1 … (1) Massa 𝑚2 Arah sumbu 𝑥 𝑇 − 𝑇 cos 𝜃 + 𝑁 sin 𝜃 = 𝑚2𝑎2 𝑇(1 − cos 𝜃) + 𝑁 sin 𝜃 = 𝑚2𝑎2 … (2) Massa 𝑚3 Arah sumbu 𝑥 𝑁 sin 𝜃 − 𝑇 cos 𝜃 = 𝑚3𝑎3𝑥 … (3) Arah sumbu 𝑦 𝑚3𝑔 − 𝑁 cos 𝜃 − 𝑇 sin 𝜃 = 𝑚3𝑎3𝑦 … (4)
Perhatikan uraian berikut! Jika misalkan massa 𝑚1 bergerak sejauh 𝑥1 ke kanan dan massa 𝑚2 bergerak sejauh 𝑥2 ke kiri, maka massa 𝑚3 akan menuruni 𝑚2 sejauh 𝑥1 + 𝑥2. Berarti pada sumbu 𝑥 𝑚2 berpindah sejauh 𝑥3 = (𝑥1 + 𝑥2) cos 𝜃 − 𝑥2 dan pada sumbu 𝑦 𝑦3 = (𝑥1 + 𝑥2) sin 𝜃. Jika kita turunkan dua kali terhadap waktu dan mengingat bahwa percepatan adalah turunan kedua dari perpindahan terhadap waktu maka hasil ini akan menjadi 𝑎3𝑥 = (𝑎1 + 𝑎2) cos 𝜃 − 𝑎2 … (5) 𝑎3𝑦 = (𝑎1 + 𝑎2) sin 𝜃 … (6)
Subtitusi persamaan (1) ke (2) 𝑚1𝑎1(1 − cos 𝜃) + 𝑁 sin 𝜃 = 𝑚2𝑎2
𝑁 =𝑚2𝑎2 − 𝑚1𝑎1(1 − cos 𝜃)
sin 𝜃… (7)
Subtitusi persamaan (1), (5), dan (7) ke (3) 𝑚2𝑎2 − 𝑚1𝑎1(1 − cos 𝜃)
sin 𝜃sin 𝜃 − 𝑚1𝑎1 cos 𝜃 = 𝑚3[(𝑎1 + 𝑎2) cos 𝜃 − 𝑎2]
[𝑚2 + 𝑚3(1 − cos 𝜃)]𝑎2 − (𝑚1 + 𝑚3 cos 𝜃)𝑎1 = 0
𝑎1 =𝑚1 + 𝑚3 cos 𝜃
𝑚2 + 𝑚3(1 − cos 𝜃)𝑎2 … (8)
Subtitusi persamaan (1), (6), dan (7) ke (4)
𝑚3𝑔 −𝑚2𝑎2 − 𝑚1𝑎1(1 − cos 𝜃)
sin 𝜃cos 𝜃 − 𝑚1𝑎1 sin 𝜃 = 𝑚3(𝑎1 + 𝑎2) sin 𝜃
𝑚3𝑔 sin 𝜃 − 𝑚2𝑎2 cos 𝜃 + 𝑚1𝑎1(1 − cos 𝜃) cos 𝜃 − 𝑚1𝑎1 sin2 𝜃 = 𝑚3(𝑎1 + 𝑎2) sin2 𝜃 (𝑚2 cos 𝜃 + 𝑚3 sin2 𝜃)𝑎2 + (𝑚3 sin2 𝜃 − 𝑚1(1 − cos 𝜃) cos 𝜃 + 𝑚1 sin2 𝜃)𝑎1 = 𝑚3𝑔 sin 𝜃 (𝑚2 cos 𝜃 + 𝑚3 sin2 𝜃)𝑎2 + (𝑚3 sin2 𝜃 − 𝑚1(1 − cos 𝜃))𝑎1 = 𝑚3𝑔 sin 𝜃 … (9)
Subtitusi persamaan (8) ke (9)
(𝑚2 cos 𝜃 + 𝑚3 sin2 𝜃)𝑎2 + (𝑚3 sin2 𝜃 − 𝑚1(1 − cos 𝜃))𝑚1 + 𝑚3 cos 𝜃
𝑚2 + 𝑚3(1 − cos 𝜃)𝑎2
= 𝑚3𝑔 sin 𝜃 [(𝑚2 cos 𝜃 + 𝑚3 sin2 𝜃)(𝑚2 + 𝑚3(1 − cos 𝜃))
+ (𝑚3 sin2 𝜃 − 𝑚1(1 − cos 𝜃))(𝑚1 + 𝑚3 cos 𝜃)]𝑎2
= (𝑚2 + 𝑚3(1 − cos 𝜃))𝑚3𝑔 sin 𝜃

Basyir Al Banjari
0896-5985-6821
mechtermlighlismfism
DC3BCE5B
www.basyiralbanjari.wordpress.com
Ahmad Basyir Najwan Jln. Mr. Cokrokusumo No.54 RT.015/005, Kel. Cempaka, Kec. Cempaka, Kota
Banjarbaru, Kalimantan Selatan, Kode Pos 70733 Contact Person : 0896-5985-6821
Hal | 17
𝑎2 =(𝑚2 + 𝑚3(1 − cos 𝜃))𝑚3𝑔 sin 𝜃
(𝑚2 cos 𝜃 + 𝑚3 sin2 𝜃)(𝑚2 + 𝑚3(1 − cos 𝜃)) + (𝑚3 sin2 𝜃 − 𝑚1(1 − cos 𝜃))(𝑚1 + 𝑚3 cos 𝜃)
𝑎1 =(𝑚1 + 𝑚3 cos 𝜃)𝑚3𝑔 sin 𝜃
(𝑚2 cos 𝜃 + 𝑚3 sin2 𝜃)(𝑚2 + 𝑚3(1 − cos 𝜃)) + (𝑚3 sin2 𝜃 − 𝑚1(1 − cos 𝜃))(𝑚1 + 𝑚3 cos 𝜃)
Percepatan massa 𝑚1 terhadap 𝑚2 adalah 𝑎1 + 𝑎2. Maka untuk menempuh jarak sejauh
𝐿 waktu yang diperlukan adalah
𝐿 =1
2(𝑎1 + 𝑎2)𝑡2
𝑡 = √2𝐿
𝑎1 + 𝑎2
Maka selang waktu dari saat sistem dilepaskan sampai massa 𝑚1 dan 𝑚2 bertumbukan
adalah
𝑡 = √2𝐿(𝑚2 cos 𝜃 + 𝑚3 sin2 𝜃)(𝑚2 + 𝑚3(1 − cos 𝜃)) + (𝑚3 sin2 𝜃 − 𝑚1(1 − cos 𝜃))(𝑚1 + 𝑚3 cos 𝜃)
(𝑚1 + 𝑚2 + 𝑚3)𝑚3𝑔 sin 𝜃







