bab iii pemodelan sistemeprints.umm.ac.id/42941/4/bab iii.pdfmenggunakan model yang tersedia pada...
TRANSCRIPT
12
BAB III
PEMODELAN SISTEM
Pada bab 3 akan memuat pemodelan sistem dari setiap pembangkit, yaitu
sistem PV, Wind Power dan PLTmH. Pemodelan ini bertujuan untuk mengetahui
karakteristik dari masing-masing pembangkit. Sehingga, pada saat menggabungkan
ketiga pembangkit tersebut tidak terjadi error. Pada bab ini dijelaskan juga tentang
input dari PV dan Wind Power yang berubah-ubah.
Pemodelan sistem ini, menggunakan software MATLAB/SIMULINK
R2016a agar dapat memperoleh hasil yang maksimal dengan menggunakan
langkah-langkah sebagai berikut :
3.1 Pemodelan sistem PV
Dalam penelitian ini, pemodelan sistem PV merupakan hal yang penting,
karena PV diasumsikan sebagai pembangkit utama bersama dengan Wind Power.
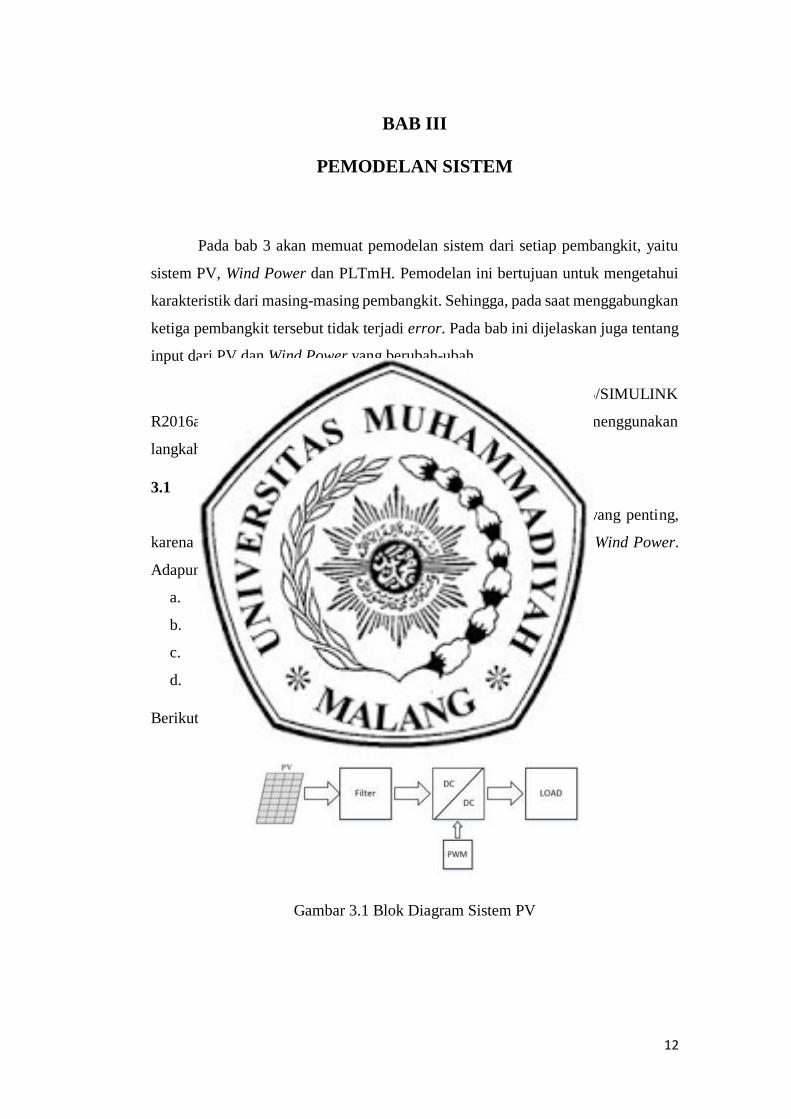
Adapun beberapa komponen sistem PV adalah :
a. PV array
b. Filter C
c. Pulse Width Modulation (PWM)
d. DC-DC converter (Boost converter)
Berikut merupakan diagram blok sistem PV :
Gambar 3.1 Blok Diagram Sistem PV
13
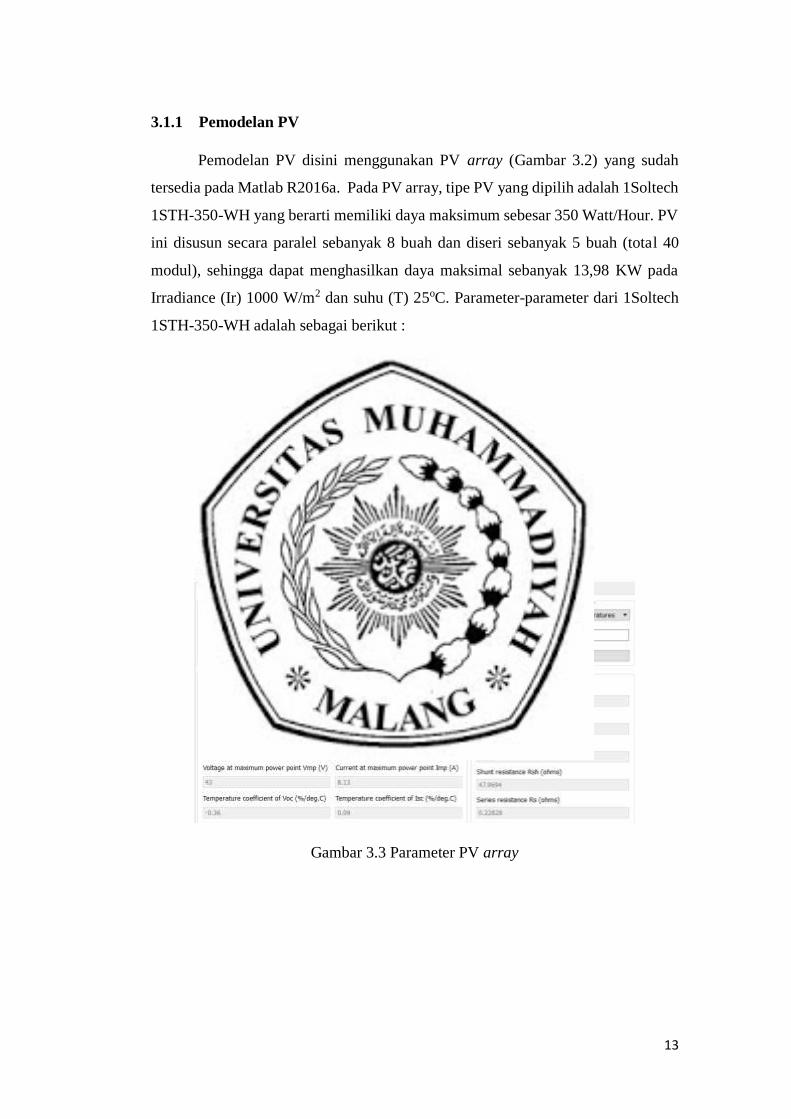
3.1.1 Pemodelan PV
Pemodelan PV disini menggunakan PV array (Gambar 3.2) yang sudah
tersedia pada Matlab R2016a. Pada PV array, tipe PV yang dipilih adalah 1Soltech
1STH-350-WH yang berarti memiliki daya maksimum sebesar 350 Watt/Hour. PV
ini disusun secara paralel sebanyak 8 buah dan diseri sebanyak 5 buah (total 40
modul), sehingga dapat menghasilkan daya maksimal sebanyak 13,98 KW pada
Irradiance (Ir) 1000 W/m2 dan suhu (T) 25oC. Parameter-parameter dari 1Soltech
1STH-350-WH adalah sebagai berikut :
Gambar 3.2 PV array
Gambar 3.3 Parameter PV array

14
Adapun karakteristik satu modul dari sistem PV adalah sebagai berikut :
Gambar 3.4 Karakteristik 1 Modul PV
Sedangkan karakteristik dari 40 modul adalah sebagai berikut :
Gambar 3.5 Karakteristik 40 modul PV array

15
3.1.2 Pemodelan DC-DC Boost Converter
DC-DC Boost Converter merupakan salah satu converter sederhana yang
didalamnya terdapat Induktor (L), Kapasitor (C), Mosfet (sebagai pensaklar), Dioda
dan Resistor Beban (R). Converter ini berfungsi menaikkan tegangan DC dari nilai
tertentu, menjadi nilai yang kita inginkan menggunakan perhitungan mtematika.
Gambar 3.6 Rangkaian Boost Converter
Setelah mengetahui rangkaian dari boost converter, langkah selanjutnya adalah
menentukan parameter-parameter dari setiap komponen menggunakan parameter
keluaran dari PV array.
Tabel 3.1 Perencanaan Boost Converter PV
Daya PV (W) 13.98 KW
Voltage Input (Vin) 257.5 V
Voltage Output (Vout) 350 V
Frekuensi (f) 40 KHz
Duty Cycle (D) 0.35
Dengan parameter diatas, dapat ditentukan nilai dari masing-masing komponen
menggunakan perhitungan dibawah ini :
𝑉𝑜𝑢𝑡 = 𝑉𝑖𝑛
1−𝐷 …(3.1)
𝐿𝑚𝑖𝑛 = (1−𝐷)2∗𝐷∗𝑅
2∗𝑓 …(3.2)
𝐶𝑚𝑖𝑛 = 𝐷∗𝑉𝑜𝑢𝑡
𝑉𝑟∗𝑅∗𝑓 …(3.3)
16
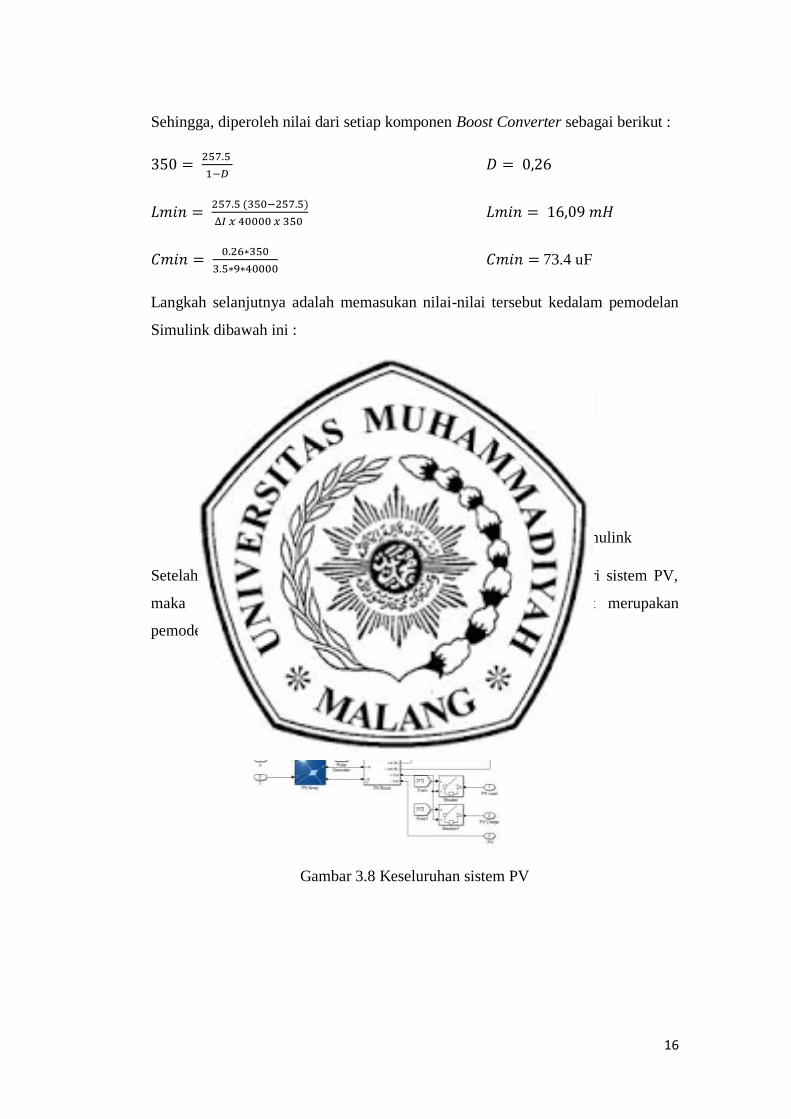
Sehingga, diperoleh nilai dari setiap komponen Boost Converter sebagai berikut :
350 = 257.5
1−𝐷 𝐷 = 0,26
𝐿𝑚𝑖𝑛 = 257.5 (350−257.5)
∆𝐼 𝑥 40000 𝑥 350 𝐿𝑚𝑖𝑛 = 16,09 𝑚𝐻
𝐶𝑚𝑖𝑛 = 0.26∗350
3.5∗9∗40000 𝐶𝑚𝑖𝑛 = 73.4 uF
Langkah selanjutnya adalah memasukan nilai-nilai tersebut kedalam pemodelan
Simulink dibawah ini :
Gambar 3.7 Pemodelan DC-DC Boost Converter pada Simulink
Setelah mendapatkan semua persamaan dan konsep pemodelan dari sistem PV,
maka dapat dilakukan pemodelan secara keseluruhan. Berikut merupakan
pemodelan keseluruhan dari sistem PV :
Gambar 3.8 Keseluruhan sistem PV

17
3.2 Pemodelan Wind Power
Pada pemodelan ini, peran Wind Power sangat penting karena merupakan
pembangkit utama bersama dengan PV. Pemodelan Wind Power menganut prinsip
Wind Energy Conversion system (WECS) yang berarti tenaga angin akan dirubah
menjadi tenaga listrik dengan cara mengkonversi energi kinetik angin menjadi
energi mekanik dengan pertolongan turbin angin dan selanjutnya dirubah oleh
generator sehingga menjadi energi listrik. Selain itu, WECS juga dapat mengurangi
kerumitan dari perangkat keras dan kontrollernya. Sehingga lebih terpercaya dan
efisien ketimbang pemodelan Double Fed Induction Generator (DFIG) berbasis
WECS (Badoni dan Prakash, 2014)
Didalam penyusunan sistem Wind Power, ada beberapa komponen utama
diantaranya :
a. Wind turbine
b. Permanent Magnet Synchronous Generator
c. Penyearah
d. Filter LC
e. DC-DC Converter (Buck Converter)
Berikut merupakan diagram blok sistem Wind Power :
Gambar 3.9 Diagram Blok Sistem Wind Power

18
Secara matematis, daya Wind Power adalah :
Pm = 𝐶𝑝 ( 1
2 ρ A 𝑉3 ) …(3.4)
𝑇𝑟 =𝐶𝑝(
1
2 ρ A 𝑉3 )
𝜔𝑅 …(3.5)
Secara umum, nilai Cp sebagai fungsi tip speed ratio (𝜆) atau TSR dan sudut pitch
blade (𝛽). Nilai Cp dan TSR dapat dinyatakan dengan :
𝐶𝑝(𝜆, 𝛽) = 𝐶1 (𝐶2
𝜆𝑖− 𝐶3𝛽 − 𝐶4) 𝑒
−𝐶5𝜆𝑖 + 𝐶6𝜆
1
𝜆𝑖=
1
𝜆 + 0,008𝛽−
0,035
𝛽3 + 1
𝜆 =𝜔𝑅𝑅
𝑉
Sehingga, daya turbin angin dan torsinya adalah :
𝑃𝑚 = (1
2𝜌𝜋𝑅2𝑉3) (𝐶1 (
𝐶2
𝜆𝑖− 𝐶3𝛽 − 𝐶4) 𝑒
−𝐶5𝜆𝑖 + 𝐶6
𝜔𝑅𝑅
𝑉 )
𝑇𝑟 =(𝐶1 (
𝐶2𝜆𝑖
− 𝐶3𝛽 − 𝐶4) 𝑒−𝐶5𝜆𝑖 + 𝐶6
𝜔𝑅𝑅𝑉
) (12
𝜌𝐴𝑉3)
𝜔𝑅
Nilai koefisien C1 sampai C6 adalah :
C1 = 0,5176 ; C2 = 116 ; C3 = 0,4 ; C4 = 5 ; C5 =21 dan C6 = 0,0068
Dimana :
Cp : Koefisien Power
𝜌 : Kerapatan Udara (kg/m) = 1,2550 kg/m
𝐴 : Luas penampang turbin (m2)
V : kecepatan angin (m/s)

19
Pm : Daya Turbin (Watt)
𝑇𝑟 : Torsi turbin angin (Nm)
𝜔𝑅 : Keepatan rotasi turbin angin (rad/s)
R : Radius rotor turbin angin (m)
3.2.1 Pemodelan Pemanent Magnet Synchronous Generator
Pada Wind Power, Permanent Magnet Synchronous Generator (PMSG)
berfungsi untuk mengubah energi mekanik dari turbin angin menjadi energi listrik.
Penggunaan PMSG bertujuan untuk mempermudah pemodelan pada
Matlab/Simulink karena dapat diaplikasikan pada turbin-turbin kecil. PMSG disini
menggunakan model yang tersedia pada Matlab/Simulink. Berikut merupakan
gambar beserta parameter dari PMSG :
Gambar 3.10 Gambar Model PMSG
Gambar 3.11 Parameter PMSG

20
3.2.2 Pemodelan Wind Turbine
Pemodelan Wind Turbine disini menggunakan model yang tersedia pada
Matlab/Simulink, berikut gambar model dan parameter dari Wind Turbine:
Gambar 3.12 Gambar Model Wind Turbine
Gambar 3.13 Parameter Wind Turbine
3.2.3 Pemodelan DC-DC Buck Converter
DC-DC Buck Converter merupakan salah satu converter sederhana yang
didalamnnya terdapat Inductor (L), Kapasitor (C), Mosfet (sebagai pensaklar),
Dioda dan Resistor Beban (R). Converter ini berfungsi menurunkan tegangan DC

21
dari nilai tertentu, menjadi nilai yang kita inginkan menggunakan perhitungan
matematika.
Gambar 3.14 Rangkaian Buck Converter
Setelah mengetahui mengetahui rangkaian dari Buck Converter, langkah
selanjutnya adalah menentukan parameter-parameter dari setiap komponen
menggunakan parameter keluaran dari Wind Turbine.
Tabel 3.1 Perencanaan Buck Converter Wind Power
Daya PV (W) 25 KW
Voltage Input (Vin) 440.3 V
Voltage Output (Vout) 355 V
Frekuensi (f) 40 KHz
Duty Cycle (D) 0.8
Dengan parameter diatas, dapat ditentukan nilai dari masing-masing komponen
menggunakan perhitungan dibawah ini :
𝐷 = 𝑉𝑜𝑢𝑡
𝑉𝑖𝑛
𝐿𝑚𝑖𝑛 = (1 − 𝐷)2 ∗ 𝑅
2 ∗ 𝑓
𝐶𝑚𝑖𝑛 = (1 − 𝐷) ∗ 𝑉𝑜𝑢𝑡
8 ∗ 𝑉𝑟 ∗ 𝐿 ∗ 𝑓2

22
Sehingga, diperoleh nilai dari setiap komponen Buck Converter sebagai berikut :
𝐷 = 355
440.3 𝐷 = 0,8
𝐿𝑚𝑖𝑛 = (1−0.8)2∗ 5
2 𝑥 40000 𝐿𝑚𝑖𝑛 = 0,484 𝑚𝐻
𝐶𝑚𝑖𝑛 = (1−0.8)∗355
8∗3.55∗(0.488∗10−3)∗400002 𝐶𝑚𝑖𝑛 = 3.125 uF
Langkah selanjutnya adalah memasukan nilai-nilai tersebut kedalam pemodelan
Simulink dibawah ini :
Gambar 3.15 Pemodelan DC-DC Buck Converter pada Simulink
Setelah mendapatkan semua persamaan dan konsep pemodelan dari Wind Power,
maka dapat dilakukan pemodelan secara keseluruhan. Berikut merupakan
pemodelan keseluruhan dari Wind Power :
Gambar 3.16 Pemodelan keseluruhan Wind Power

23
3.3 Pemodelan PLTmH
Pada sistem ini, PLTmH berfungsi sebagai pembangkit backup, apabila
terjadi kekurangan daya dari pembangkit PV dan Wind Power. Adapun beberapa
komponen sistem PLTmH adalah :
a. Hydraulic Turbine
b. Generator
c. DC-DC Converter (Buck converter)
3.3.1 Pemodelan Hydraulic Turbine
Pada pemodelan hydraulic turbine ini, digunakan pemodelan sederhana
karena untuk mempersingkat kerumitan dari pemodelan Hydraulic Turbine. Berikut
pemodelannya :
Gambar 3.17 Pemodelan Hydraulic Turbine
Dimana didalam motor servo terdapat :
Gambar 3.18 Pemodelan Servo Motor
Gambar 3.19 Pemodelan Matematis Hydraulic Turbine
24
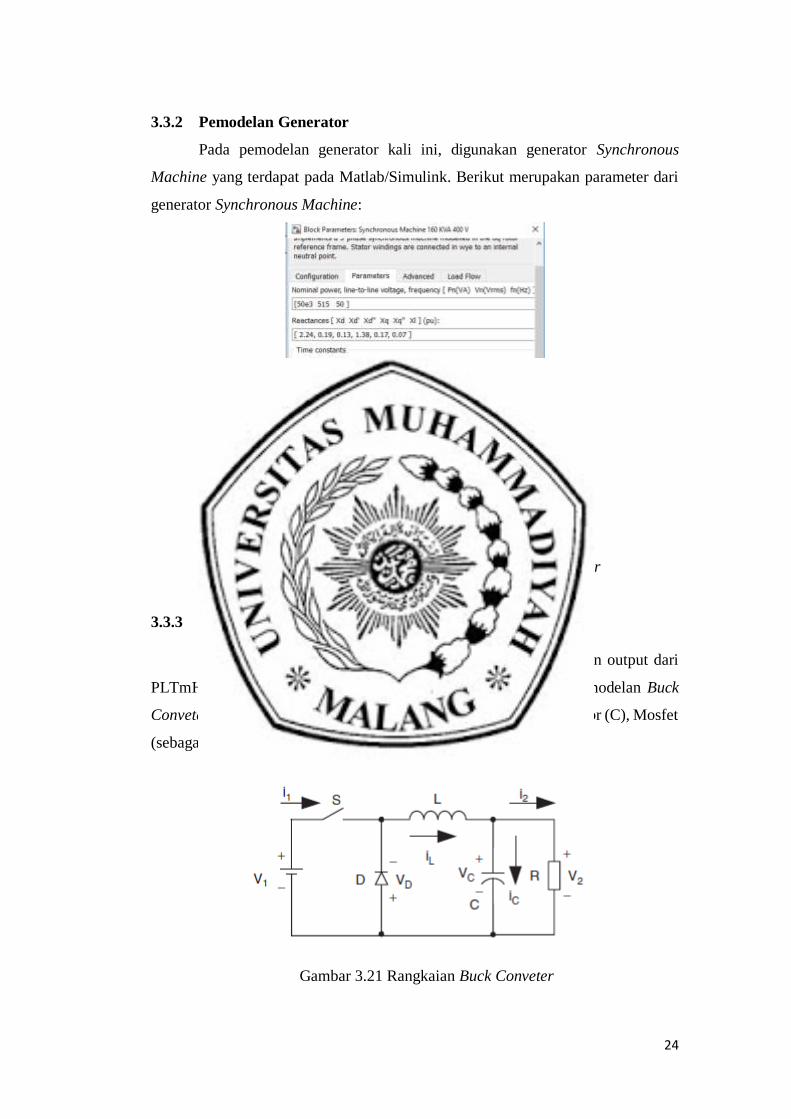
3.3.2 Pemodelan Generator
Pada pemodelan generator kali ini, digunakan generator Synchronous
Machine yang terdapat pada Matlab/Simulink. Berikut merupakan parameter dari
generator Synchronous Machine:
Gambar 3.20 Pemodelan Synchronous Machine generator
3.3.3 Pemodelan DC-DC Buck Converter
Buck Converter disini bertujuan untuk memperkecil tegangan output dari
PLTmH, agar disesuaikan dengan tegangan dari beban. Berikut pemodelan Buck
Conveter sederhana yang didalamnnya terdapat Induktor (L), Kapasitor (C), Mosfet
(sebagai pensaklar), Dioda dan Resistor Beban (R).
Gambar 3.21 Rangkaian Buck Conveter
25
Setelah mengetahui mengetahui rangkaian dari buck converter, langkah
selanjutnya adalah menentukan parameter-parameter dari setiap komponen
menggunakan parameter keluaran dari PLTmH.
Tabel 3.2 Perencanaan Buck Converter PLTmH
Daya PV (W) 50 KW
Voltage Input (Vin) 515 V
Voltage Output (Vout) 350 V
Frekuensi (f) 40 KHz
Duty Cycle (D) 0.8
Dengan parameter diatas, dapat ditentukan nilai dari masing-masing
komponen menggunakan perhitungan dibawah ini :
𝐷 = 𝑉𝑜𝑢𝑡
𝑉𝑖𝑛
𝐿𝑚𝑖𝑛 = (1 − 𝐷)2 ∗ 𝑅
2 ∗ 𝑓
𝐶𝑚𝑖𝑛 = (1 − 𝐷) ∗ 𝑉𝑜𝑢𝑡
8 ∗ 𝑉𝑟 ∗ 𝐿 ∗ 𝑓2
Sehingga, diperoleh nilai dari setiap komponen Buck Conveter sebagai berikut :
𝐷 = 350
515 𝐷 = 0,7
𝐿𝑚𝑖𝑛 = (1−0.7)2∗ 2.5
2 𝑥 40000 𝐿𝑚𝑖𝑛 = 0,8 𝑚𝐻
𝐶𝑚𝑖𝑛 = (1−0.8)∗350
8∗3.55∗(0.8∗10−3)∗400002 𝐶𝑚𝑖𝑛 = 3.125 uF
26
Langkah selanjutnya adalah memasukan nilai-nilai tersebut kedalam pemodelan
Simulink dibawah ini :
Gambar 3.23 Pemodelan DC-DC Buck Conveter pada Simulink
Setelah mendapatkan semua persamaan dan konsep pemodelan dari PLTmH, maka
dapat dilakukan pemodelan secara keseluruhan. Berikut merupakan pemodelan
keseluruhan dari PLTmH:
Gambar 3.24 Pemodelan Keseluruhan PLTmH
3.4 Pemodelan ANN
Pada saat pemodelan ANN, terdapat 2 hal yang harus diperhatikan. Pertama
adalah data latih, yang kedua adalah data uji. Data latih digunakan untuk
menentukan nilai bobot yang dibutuhkan oleh ANN, sedangkan data uji digunakan
untuk memvalidasi keluaran ANN dengan target yang diinginkan. Berikut
merupakan proses pembuatan ANN pada Matlab/Simulink :
1. Menentukan Variabel masukan ANN
Pemodelan ANN menggunakan 8 masukan, yaitu waktu, V PV, P PV,
V Wind, P Wind, V PLTmH, P PLTmH dan Load. V PV merupakan
tegangan PV, P PV merupakan daya PV, V Wind adalah tegangan Wind
27
Power, P Wind adalah daya Wind Power, V PLTmH adalah tegangan
PLTmH, P PLTmH adalah daya PLTmH dan Load adalah beban.
2. Normalisasi Data
Setelah mendapatkan data dari variable yang diinginkan, langkah
selanjutnya adalah menormalisasi data. Normalisasi data dilakukan
dengan menggunakan rumus X′ =0.8∗ (𝑋−𝑏)
(𝑎−𝑏)+ 0.1
Dimana : X’ : Data Hasil Normalisasi
X : Data asli/ data awal
a : Nilai maksimum data asli
b : Nilai minimum data asli
3. Melatih ANN
Setelah melakukan normalisasi data, langkah selanjutnya adalah melatih
ANN menggunakan data hasil normalisasi. Setelah melatih ANN, maka
pemodelan ANN akan didapatkan.
4. Setelah mendapatkan pemodelan ANN dari Matlab, langkah selanjutnya
adalah melakukan pengujian untuk membandingkan keluaran ANN
dengan target pada saat pelatihan.
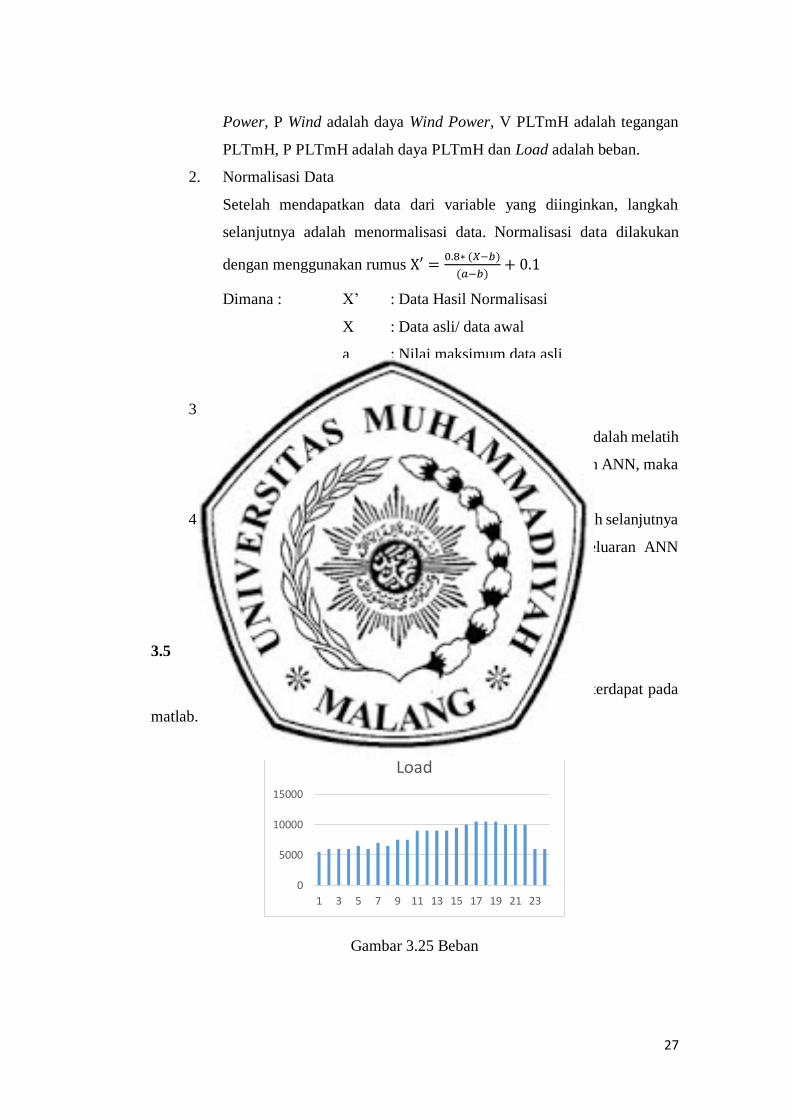
3.5 Pemodelan Beban
Pada pemodelan beban kali ini, menggunakan beban DC yg terdapat pada
matlab. Berikut merupakan data beban yang harus dimodelkan :
Gambar 3.25 Beban
0
5000
10000
15000
1 3 5 7 9 11 13 15 17 19 21 23
Load

28
Gambar 3. 26 Konfigurasi Beban
Gmbar 3.27 Pemodelan Beban
Terdapat 24 beban yang akan aktif bergantian mulai dari detik 0 sampai detik 24.
Contoh, pada detik 0 sampai 1 makan beban 1 akan aktif, pada detik ke 2 sampai 3
beban 2 akan aktif dan beban 1 akan mati, begitu juga seterusnya.