bab ii landasan teori · 2.1.4 buzzer sebagai keluaran dari program mikrokontroler dimana buzer...
TRANSCRIPT
4
BAB II
LANDASAN TEORI
2.1. Teori Pendukung
Pada bab ini akan menjelaskan beberapa komponen utama yang digunakan
dalam pembuatan Komponen alat. Untuk mempermudah dalam pemaparan
komponen yang digunakan penulis membaginya kedalam beberapa kelompok yaitu
IC, komponen elektronika dasar, sensor, mikrokontroler, dan program.
2.1.1 IC (Integrated Circuit) Regulator 7805
Menurut Chandra (210:25) menyimpulkan bahwa Integrated Circuit atau
disingkat dengan IC adalah Komponen Elektronika yang dibuat dari bahan semi
kunduktor dan merupakan pengembangan darai transistor, dalam sebuah IC terdiri
dari gabungan komponen aktif maupun fasif yang tersusun dalam kemasan
(packages), Jenis-jenis kemasan pada IC yang umumnya digunakan diantaranya
single in-line Package (SIP), Dual in-line Package (DIP), Quad in-line Package
(QIP), dan Flat Packs
Menurut Dwi (2010:105) IC regulator 7805 adalah ” Komponen elektronika
yang berfungsi menstabilkan keluaran tegangan 5 Volt” .
Penggunaan IC 7805 adalah untuk mendapatkan tegangan lebih dari 5 Volt yang ebih
stabil dan bukan lebih rendah.
Sedangkan menurut teknikkomputer.com dijelaskan bahwa IC 7805 ini merupakan
IC regulator atau penuruna linear positif DC dengan kata lain menerangakan bahwa

5
IC 7805 ini akan merubah nilai tegangan yang masuk menjadi 5 volt pada pin
keluaran.
Sumber: http://www.engineersgarage.com/electronic-component/7805-
voltage-regulator-ic
Gambar II.1. IC 7805 dan kaki IC 7805
2.1.2. Komponen Elektronika
Dalam rangkaian elektronika, komponen-komponen elektronika dibagi
menjadi dua jenis yaitu komponen pasif dan komponnen aktif. Komponen pasif
adalah komponen yang dapat digunakan tampa tegangan minimal contoh kapasitor
dan resistor sedangkan komponen aktif adalah komponen yang dapat digunakan jika
ada tegangan minimal contoh dioda, transistor dan operational amplifire (op-amp)
komponen-komponen dasar pembentuk sebuah peralatan Elektronika seperti Resistor,
Kapasitor, Transistor, Dioda, Induktor dan IC yang digunakan pada alat ini.
1. Resistor
Menurut Widodo (2007:46) Resistor adalah “komponen elektronik yang
berfungsi untuk memberikan hambatan terhadap aliran arus listrik”. Dengan demikian
resistor dengan nilai resitansi tertentu berfungsi sebagai pembatas arus listrik yang
6
kemudian akan dialirkan paada komponen yang lain sehingga komponen dapat
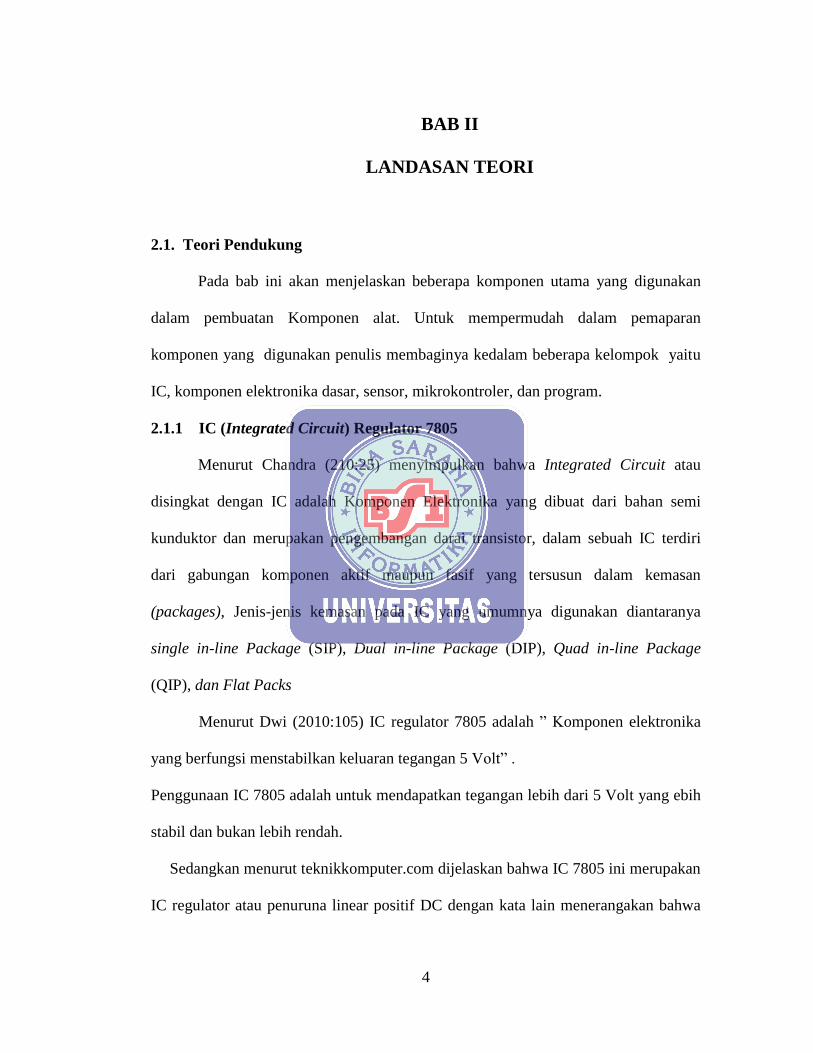
bekarja sesuai karakteristiknya dengan satuan nilai dengan Ohm (Ω).
Sumber:http://Teknikelektronika.com/pengertian-resistor-jenis-jenis-resistor/
Gambar II.2. Simbol Resistor
Resistor sendiri di bagi menjadi dua jenis antaralain:
a. Resistor Tetap.
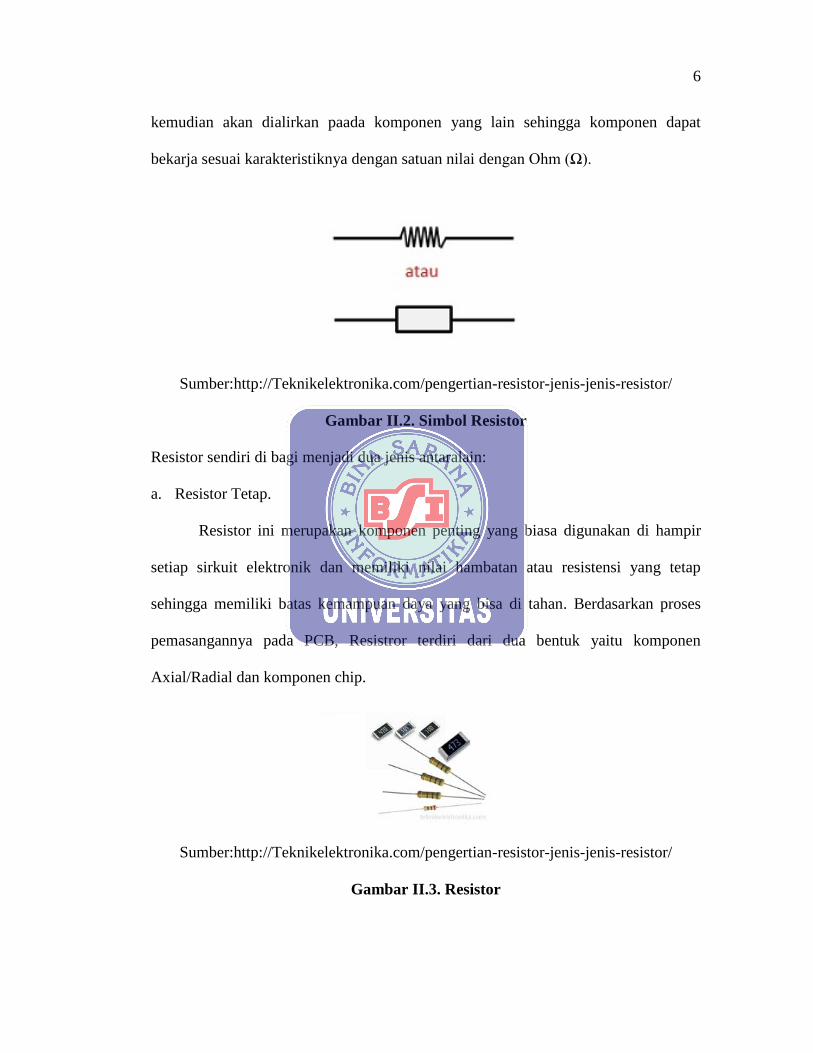
Resistor ini merupakan komponen penting yang biasa digunakan di hampir
setiap sirkuit elektronik dan memiliki nilai hambatan atau resistensi yang tetap
sehingga memiliki batas kemampuan daya yang bisa di tahan. Berdasarkan proses
pemasangannya pada PCB, Resistror terdiri dari dua bentuk yaitu komponen
Axial/Radial dan komponen chip.
Sumber:http://Teknikelektronika.com/pengertian-resistor-jenis-jenis-resistor/
Gambar II.3. Resistor
7
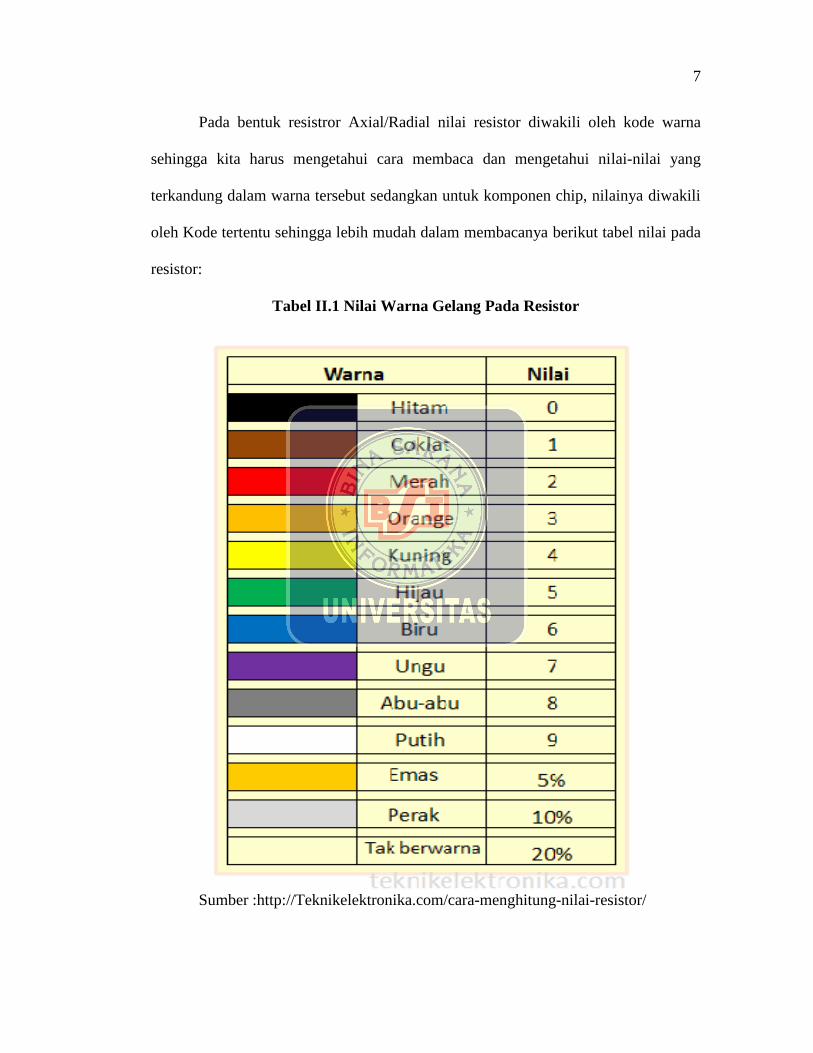
Pada bentuk resistror Axial/Radial nilai resistor diwakili oleh kode warna
sehingga kita harus mengetahui cara membaca dan mengetahui nilai-nilai yang
terkandung dalam warna tersebut sedangkan untuk komponen chip, nilainya diwakili
oleh Kode tertentu sehingga lebih mudah dalam membacanya berikut tabel nilai pada
resistor:
Tabel II.1 Nilai Warna Gelang Pada Resistor
Sumber :http://Teknikelektronika.com/cara-menghitung-nilai-resistor/
8
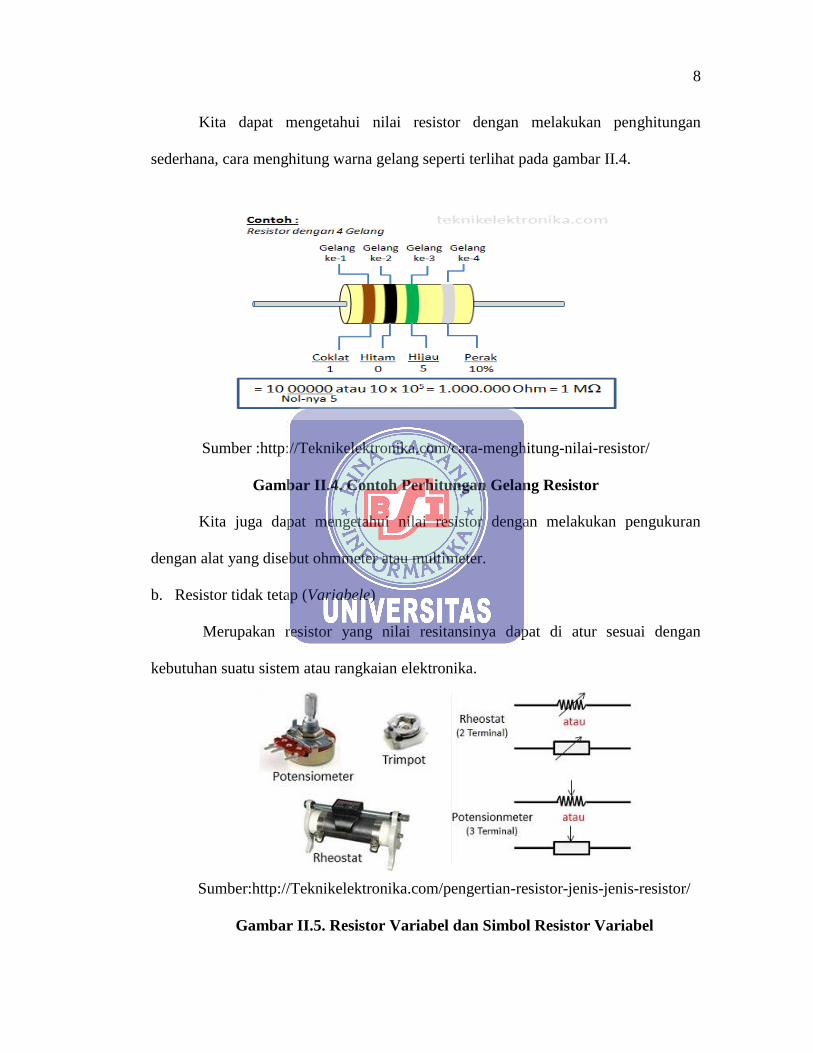
Kita dapat mengetahui nilai resistor dengan melakukan penghitungan
sederhana, cara menghitung warna gelang seperti terlihat pada gambar II.4.
Sumber :http://Teknikelektronika.com/cara-menghitung-nilai-resistor/
Gambar II.4. Contoh Perhitungan Gelang Resistor
Kita juga dapat mengetahui nilai resistor dengan melakukan pengukuran
dengan alat yang disebut ohmmeter atau multimeter.
b. Resistor tidak tetap (Variabele)
Merupakan resistor yang nilai resitansinya dapat di atur sesuai dengan
kebutuhan suatu sistem atau rangkaian elektronika.
Sumber:http://Teknikelektronika.com/pengertian-resistor-jenis-jenis-resistor/
Gambar II.5. Resistor Variabel dan Simbol Resistor Variabel
9
2. Kapasitor
Menurut idrajid(2007:92), Kapasitor adalah “Dua buah penghantar (pelat)
Konduktor yang dipisahkan oleh suatu isolator atau zat dielektrik untuk memperoleh
muatan yang sama, tapi berlawanan jenis dan berfungsi untuk menyimpan energi
potensial listrik”.
Sumber:http://Teknikelektronika.com/simbol-fungsi-kapasitor-beserta-jenis-jenis-
resistor/
Gambar II.6. kapasitor dan Simbol kapasitor
Dielektrik yang secara umun dikenal yaitu kondisi hampa udara atau vakum
berbentuk keramik, gelas, dan lain-lain. Jika kedua ujung plat logam di beri tegangan
listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki logam
lainya. Muatan positif tidak akan mengalir pada kutub negatif pada ujung logam
lainnya karena terpisah oleh dielektrik yanng bersifat nonkondoktif sehingga muatan
elektrik akan tersimpan selama tidak adanya kunduktif pada kedua kaki kapasitor.
Kapasitor yang digunakan pada alat ini antara lain:
a. Kapasitor Elektrolit (ELCO)
Kapasitor elektrolit digunakan unutuk menyediakan energi cadangan yang
melancarkan jalanya arus dari suplay dan merupakan kapsitor polar yang biasa di
pasang pada rangkaian elektronika. Pemasangan yang salah pada kaki atau terminal
10
kapasitor dapat membuat kapasitor menjadi rusak bahkan meledak, kutub negatif
ditandai dengan garis berwarna putihdapat digunakan sebagai catu daya dan memiliki
nilai kapasitas maksimal sesuai yang tertera pada bagian luar (body).
Sumber:http://Teknikelektronika.com/simbol-fungsi-kapasitor-beserta-jenis-jenis-
resistor/
Gambar II.7. Kapasitor Elektrolit dan Simbol Kapasitor Elektrolit
b. Kapasitor Keramik (ceramic Capasitor)
Kapasitor keramik merupakan kapasitor yang isolatornya terbuat dari keramik dan
berbentuk bulat tipis ataupun persegi empat kapasitor ini tidak memiliki arah atau
polaritas, sehingga dapat dipasang bolak balik dalam rangkaian elektronika. Kapasitor
yang berbentuk chip (Chip Capasitor) umumnya terbuat dari bahan keramik yang
dikemas sangat kecil sesuai kebutuhan peralatan elektronik dan biasanya dipasang
oleh mesin dengan kecepatan tinggi.
Sumber:http://Teknikelektronika.com/simbol-fungsi-kapasitor-beserta-jenis-jenis-
resistor/
Gambar II.8. Kapasitor Keramik
11
3. Kristal (XTAL OKSILATOR)
Merupakan komponen yang berfungsi untuk membangkitkan potensi osilasi
dengan stabilitas yang sangat tinggi sehingga dapat digunakan sebagai pembangkit
internal clock yang membentuk siklus mesin mikrokontroler, bahan yang biasanya
digunakan adalah kristal kwarsa dan mempunyai satuan hertz (Hz).
Sumber :http://www.leselektronika.com/2012/07/kristal-xtal-oksilator.html
Gambar II.9. Kristal dan Simbol Kristal
4. LED (Lihgt Emitting Dioda)
Menurut Arifianto (2010a:21) menyimpulkan bahwa “LED digunakan untuk
mengubah energi listrik menjadi cahaya jika terkena bias cahaya maju (fordward
bias)”. Karakteristik LED sama dengan dioda penyearah, bedanya jika dioda
membuang listrik dalam bentuk panas, sedangkan LED membuang energi dengan
mengeluarkan cahaya, terdapat beberapa warna seperti merah, kuning dan hijau.
Sumber http://Teknikelektronika.com/pengertian-led-light-emiting-diode-cara-kerja/
Gambar II.10. Bentuk LED dan Simbol LED
12
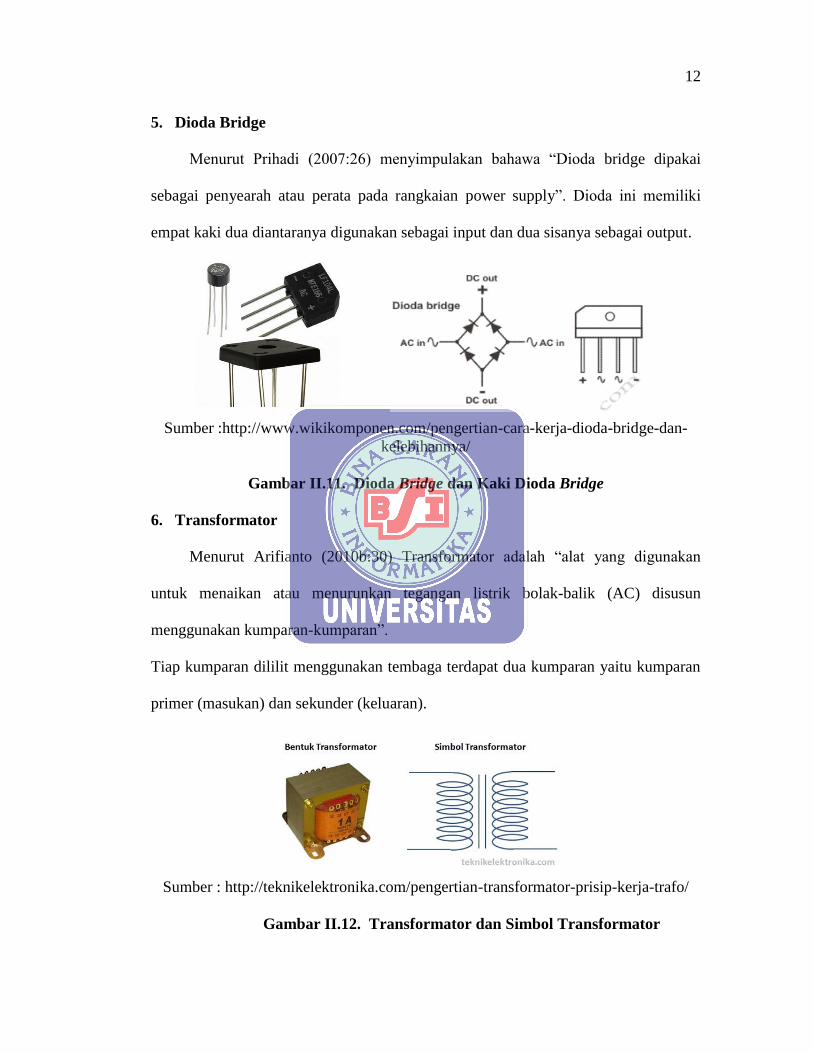
5. Dioda Bridge
Menurut Prihadi (2007:26) menyimpulakan bahawa “Dioda bridge dipakai
sebagai penyearah atau perata pada rangkaian power supply”. Dioda ini memiliki
empat kaki dua diantaranya digunakan sebagai input dan dua sisanya sebagai output.
Sumber :http://www.wikikomponen.com/pengertian-cara-kerja-dioda-bridge-dan-
kelebihannya/
Gambar II.11. Dioda Bridge dan Kaki Dioda Bridge
6. Transformator
Menurut Arifianto (2010b:30) Transformator adalah “alat yang digunakan
untuk menaikan atau menurunkan tegangan listrik bolak-balik (AC) disusun
menggunakan kumparan-kumparan”.
Tiap kumparan dililit menggunakan tembaga terdapat dua kumparan yaitu kumparan
primer (masukan) dan sekunder (keluaran).
Sumber : http://teknikelektronika.com/pengertian-transformator-prisip-kerja-trafo/
Gambar II.12. Transformator dan Simbol Transformator

13
7. Sakelar Push Button
Menurut Arifianto (2010c:31) “sakelar push button digunakan untuk
menyalakan alat elektronika sesaat ketika ketika tombol di tekan ketika tombol
sakelar dilepas, alat elektronika akan mati”. Pada pembuatan alat ini digunakan push
button untuk mebuat rangkaian close (terhubung) dan open (tidak terhubung).
Sumber http://teknikelektronika.com/pengertian-saklar-listrik-cara-kerjanya/
Gambar II.13. Push Button
2.1.3 Sensor
Menurut Arifianto (2010d:32) sensor atau tranduser adalah: ”alat yang
digunakan untuk mengubah suatu besaran fisik menjadi besaran listrik”. Sebuah
sensor harus memiliki subsitivitas yang tinggi sesuai besaran yang diukur dan tidak
mengubah sifat atau bentuk objek yang di ukur.
Sensor berfungsi sebagai pengukur suatu keadaan atau situasi tertentu
contohnya sensor asap pada alarm kebakaran, sensor suhu, sensor jarak dimana
sensor menjadi sumber data (input) dalam menetukan keluaran (output). Pada alat ini
digunakan sensor ultra sonic dimana sensor ultrasonik ini di bangkitkan melalui
sebuah alat yang disebut piezoelektrik dengan frekuensi tertentu, piezoelektrik ini
14
akan menghasilkan gelombang ultra sonik (umumnya berfrekuensi 40 KHz) ketika
Sebuah osilator diterapkan pada benda tersebut.
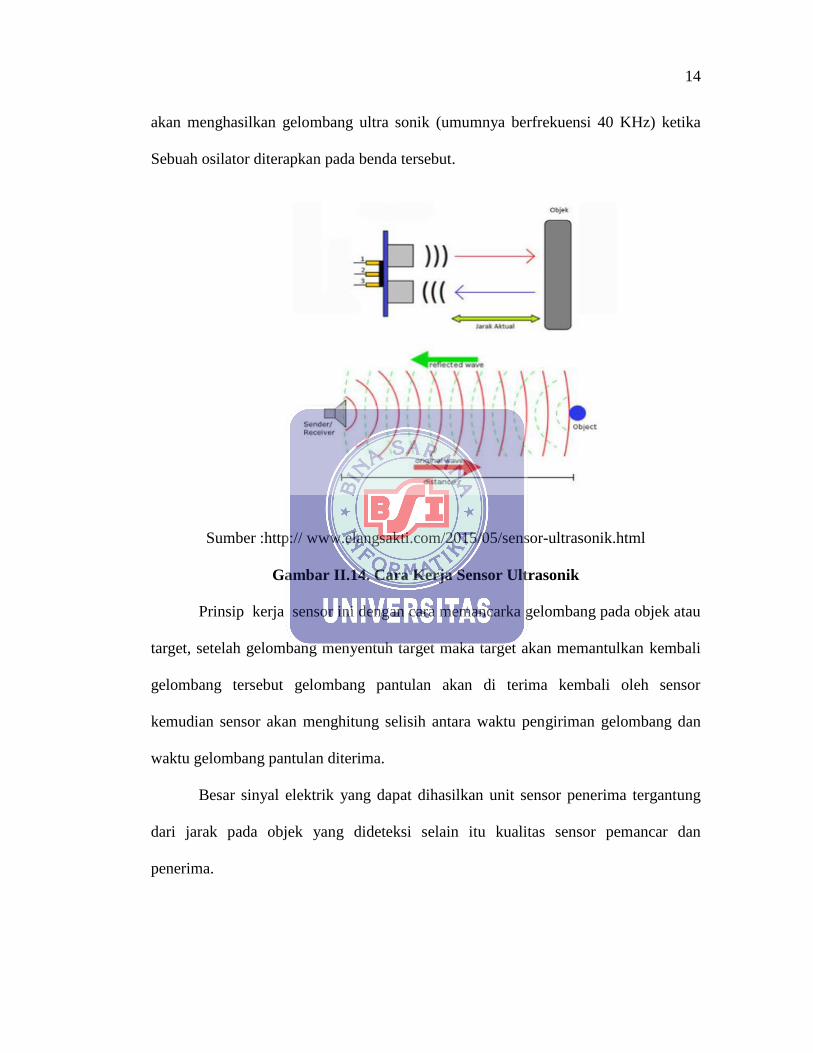
Sumber :http:// www.elangsakti.com/2015/05/sensor-ultrasonik.html
Gambar II.14. Cara Kerja Sensor Ultrasonik
Prinsip kerja sensor ini dengan cara memancarka gelombang pada objek atau
target, setelah gelombang menyentuh target maka target akan memantulkan kembali
gelombang tersebut gelombang pantulan akan di terima kembali oleh sensor
kemudian sensor akan menghitung selisih antara waktu pengiriman gelombang dan
waktu gelombang pantulan diterima.
Besar sinyal elektrik yang dapat dihasilkan unit sensor penerima tergantung
dari jarak pada objek yang dideteksi selain itu kualitas sensor pemancar dan
penerima.
15
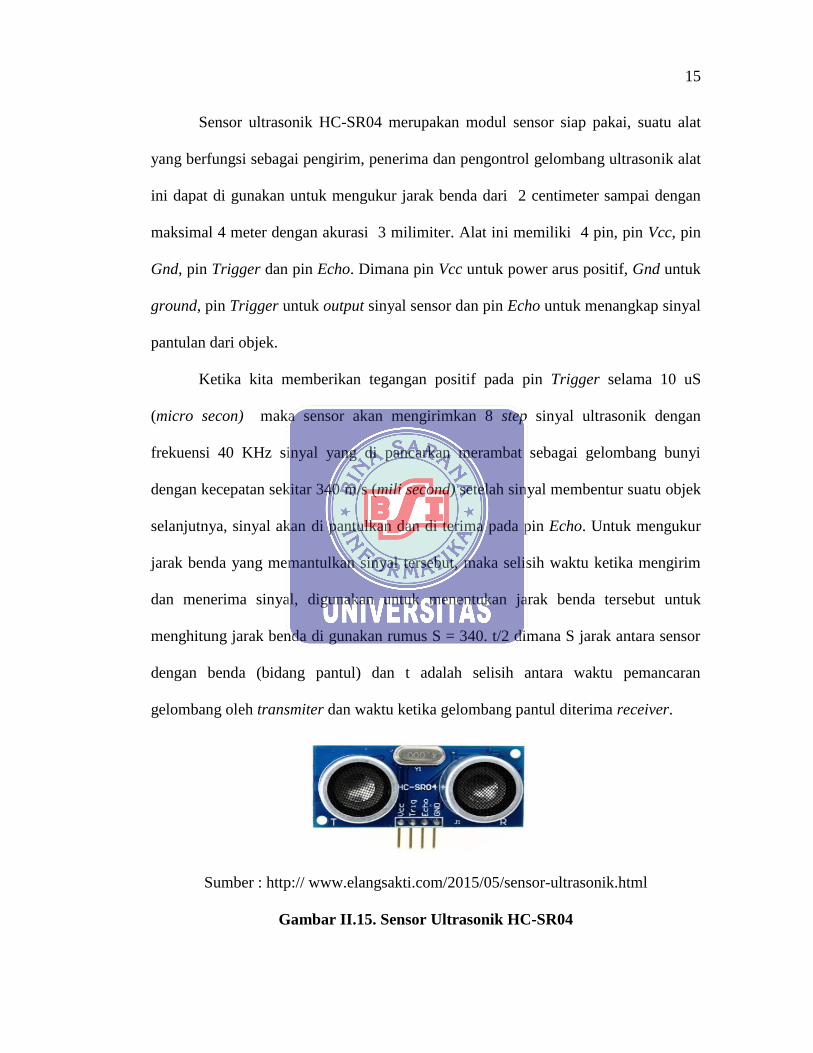
Sensor ultrasonik HC-SR04 merupakan modul sensor siap pakai, suatu alat
yang berfungsi sebagai pengirim, penerima dan pengontrol gelombang ultrasonik alat
ini dapat di gunakan untuk mengukur jarak benda dari 2 centimeter sampai dengan
maksimal 4 meter dengan akurasi 3 milimiter. Alat ini memiliki 4 pin, pin Vcc, pin
Gnd, pin Trigger dan pin Echo. Dimana pin Vcc untuk power arus positif, Gnd untuk
ground, pin Trigger untuk output sinyal sensor dan pin Echo untuk menangkap sinyal
pantulan dari objek.
Ketika kita memberikan tegangan positif pada pin Trigger selama 10 uS
(micro secon) maka sensor akan mengirimkan 8 step sinyal ultrasonik dengan
frekuensi 40 KHz sinyal yang di pancarkan merambat sebagai gelombang bunyi
dengan kecepatan sekitar 340 m/s (mili second) setelah sinyal membentur suatu objek
selanjutnya, sinyal akan di pantulkan dan di terima pada pin Echo. Untuk mengukur
jarak benda yang memantulkan sinyal tersebut, maka selisih waktu ketika mengirim
dan menerima sinyal, digunakan untuk menentukan jarak benda tersebut untuk
menghitung jarak benda di gunakan rumus S = 340. t/2 dimana S jarak antara sensor
dengan benda (bidang pantul) dan t adalah selisih antara waktu pemancaran
gelombang oleh transmiter dan waktu ketika gelombang pantul diterima receiver.
Sumber : http:// www.elangsakti.com/2015/05/sensor-ultrasonik.html
Gambar II.15. Sensor Ultrasonik HC-SR04
16
2.1.4 Buzzer
Sebagai keluaran dari program mikrokontroler dimana buzer difungsikan
untuk pemberi peringatan, sensor yang digukan adalah sensor 5 Vdc .
Sumber : www.cnbuzzer.com
Gambar II.16. Buzzer
2.1.6 Mikrokontroler Atmega 16
Menurut Winoto ( 2010:3), “Mikrokontroler adalah sebuah sistem mikro
prosesor dimana didalamnya sudah terdapat CPU, ROM, RAM, I/O, Clook dan
pralatan internal lainya yang sudah saling terhubung dang terorganisasi (teralamat)
dengan baik oleh pabrik pembuatnya dan dikemas dalam satu chips yang siap pakai”.
Sehingga kita tinggal mengisikan program ROM sesuai aturan penggunaan oleh
pabrik yang membuatnya.
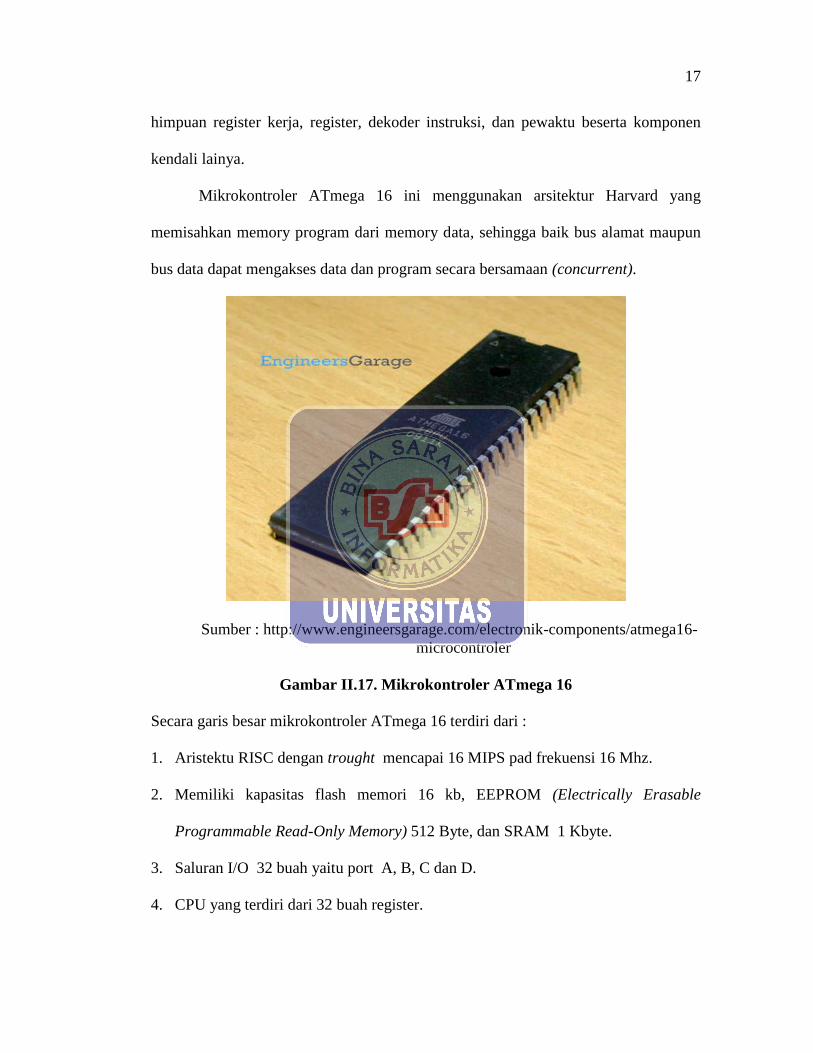
Mikrokontroler ATmega 16 merupakan CMOS 8-bit buatan Atmega keluarga
AVR mempunyai 32 register general-purpose, timer/conter dengan metode compare,
interupt eksternal, serial UART, programmable Watchdog Timer, ADC dan PWM
internal. Seperti mikroprosesor pada umumnya, secara internal mikrokontroler
Atmega16 terdiri atas unit-unit fungsional Arithmetic and Logical Unit (ALU),
17
himpuan register kerja, register, dekoder instruksi, dan pewaktu beserta komponen
kendali lainya.
Mikrokontroler ATmega 16 ini menggunakan arsitektur Harvard yang
memisahkan memory program dari memory data, sehingga baik bus alamat maupun
bus data dapat mengakses data dan program secara bersamaan (concurrent).
Sumber : http://www.engineersgarage.com/electronik-components/atmega16-
microcontroler
Gambar II.17. Mikrokontroler ATmega 16
Secara garis besar mikrokontroler ATmega 16 terdiri dari :
1. Aristektu RISC dengan trought mencapai 16 MIPS pad frekuensi 16 Mhz.
2. Memiliki kapasitas flash memori 16 kb, EEPROM (Electrically Erasable
Programmable Read-Only Memory) 512 Byte, dan SRAM 1 Kbyte.
3. Saluran I/O 32 buah yaitu port A, B, C dan D.
4. CPU yang terdiri dari 32 buah register.
18
5. Antarmuka SPI (Serial Peripheral Interface) dan USART (Universal
Synchronous Asynchronous Receiver Transmitter) sebagai komunikasi serial.
6. User interupsi internal dan eksternal.
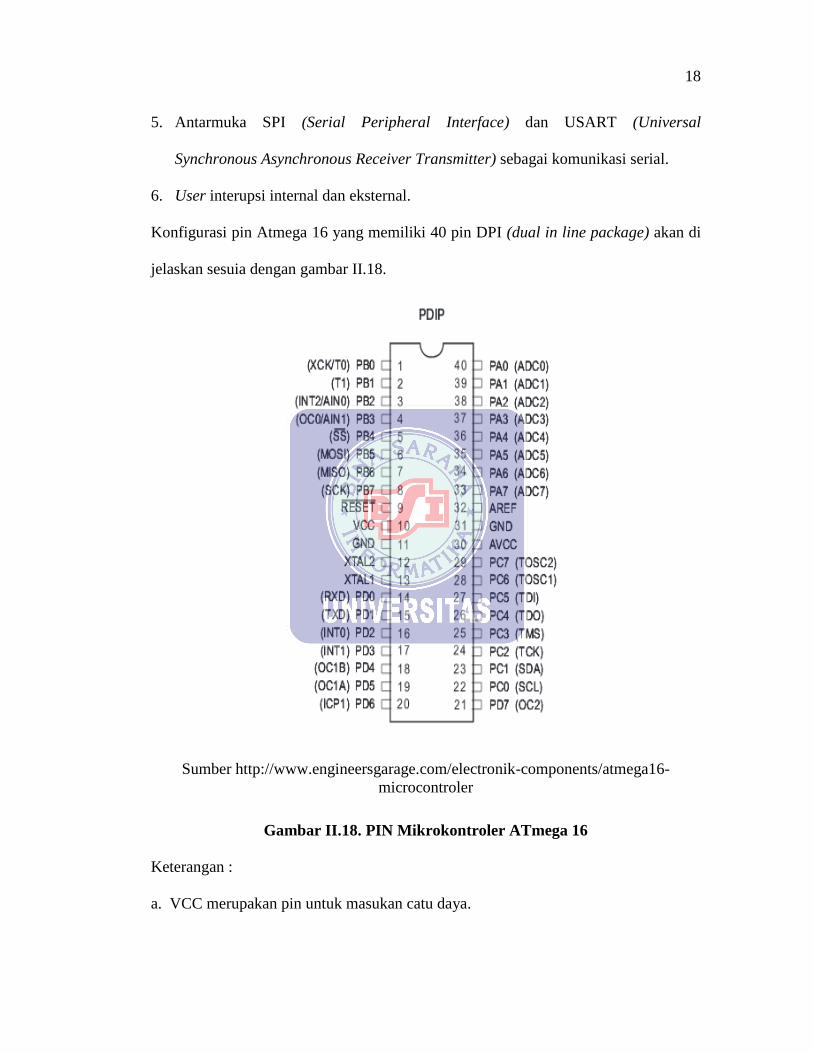
Konfigurasi pin Atmega 16 yang memiliki 40 pin DPI (dual in line package) akan di
jelaskan sesuia dengan gambar II.18.
Sumber http://www.engineersgarage.com/electronik-components/atmega16-
microcontroler
Gambar II.18. PIN Mikrokontroler ATmega 16
Keterangan :
a. VCC merupakan pin untuk masukan catu daya.
19
b. GND merupakan pin untuk grounding.
c. Port A ( PA0, PA1, PA2, PA3, PA4, PA5, PA6, dan PA7) merupakan pin I/O
(input dan output) dua arah dan pin masukan ADC (analog to digital converter).
d. Port B (PB0, PB1, PB2, PB3, PB4, PB5, PB6, dan PB7) merupakan pin I/O (input
dan output) dua arah dan juga sebagai pin khusus yaitu:
1) PB7 sebagai SCK (SPI Bus Serial Clock).
2) PB6 untuk MISO (SPI Bus Master Input/slave output).
3) PB5 untuk MOSI (SPI Bus Master Output/slav input).
4) PB4 untuk SS (slave selec input).
5) PB3 untuk AIN (analog comparator negative input) dan OCO (timer/ conter 0
output match output).
6) PB2 untuk AIN1 (Analog comparator positif input) dan INT 2 (ekternal
interupt to input).
7) PB1 untuk TI (timer /conter input).
8) PB0 untuk TOT1 (timer/conter0 external conter input) dan XCK (USART
external clock input/output).
e. Port C (PC0, PC1, PC2, PC3, PC4, PC5, PC6 dan PC7) merupakan pin I/O (input
dan output) dua arah dan juga sebagai pin khusus yaitu:
1) PC7 sebagai TOSC2 (timer oscilator pin 2).
2) PC6 sebagai TOSC2 (timer oscilator pin 1).
3) PC5 sebagai TDI (JTAG tes data in).
4) PC4 sebagai TDI (JTAG tes data out).
5) PC3 sebagai TMS (JTAG tes mode select).
20
6) PC2 sebagai TCK (JTAG tes clokck).
7) PC1 sebagai SDA (two-wire serial bus data input/output line).
8) PC0 sebagai SCL (two-wire serial bus clock line).
f. Port D (PD1, PD2, PD3, PD4, PD5, PD6 dan PD7) merupakan pin I/O (input dan
output) dua arah dan juga sebagai pin khusus yaitu:
1) PD7 sebagai OC2 (timer/conter2 output compire match output).
2) PD6 sebagai ICP (timer/counter input capture pin).
3) PD5 sebagai OC1A (timer/counter output compare A match uotput).
4) PD4 sebagai OC1B (timer/counter output compare B match uotput).
5) PD3 sebagai INT1 (external interupt 1 input).
6) PD2 sebagai INT0 (external interupt 0 input).
7) PD1 sebagai TXD (USART output pin).
8) PD0 sebagai RXD (USART input pin).
g. RESET merupakan pin yang di gunalan untuk mer-reset mikrokontroler.
h. XTAL1 dan XTAL 2 merupakan pin masukan clock external (kristal).
i. AVCC merupakan pin masukan tegangan unutk ADC.
j. AREF merupakan masukan tegangan ADC.
2.2. Konsep Dasar Program
Pada tugas akhir ini program yang akan digunakan adalaha bahasa C, yang
merupakan bahasa tingkat menengah (intermediate level language). Bahasa C juga
merupakan bahasa penerapan sistem yang dirancang agar dapat memberikan akses
kepada memori untuk membangun instruksi langsung kepada mesin dengan
dukungan sistem minimum. Untuk memasukkan perintah yang berupa bahasa C pada
21
perangkat agar perangkat tersebut dapat bergerak dengan semestinya, kami
menggunakan software CodeVision AVR.
CodeVision AVR memiliki IDE (Integrated Development Environment) yang
lengkap, dimana penulisan program, compile, link, pembuatan kode mesin
(assembler) dan download program ke terminal, yaiut untuk melakukan komunikasi
serial dengan mikrokontroler yang sudah deprogram. Proses download program ke IC
mikrokontroler AVR dapat menggunakan sistem download secara ISP (In-System
Programming).
#include <atmega16.h>
#include <delay.h>
#define Irsensor PINA.0
#define Irsensor PORTB.0
..........................................
//Variabel Global
unsigned int i.j;
void main(void)
//variabel lokal
DDRA =0x00;
PORTA=0xff;
PDRB=0x00;
PORTB=0xff;
. . . . . . . . . . . . .
22
. . . . . . . . . . .
While (1)
//statment........
//place your code here
. . . . . . . . . . .
. . . . . . . . . . .
Penjelasan dari tiap instruksi adalah sebagai berikut:
1. Preprocessor
Preprocessor (#include) biasanya digunakan untuk menyertakan file header
atau file library. File include berguna untuk memberitahu compiler agar membaca file
yang di includekan lebih dahulu untuk mengenali definisi-definisi yang digunakan
dalam program agar tidak dianggap eror.
Preprocessor (#include) digunakan untuk mendefiniskan konstanta atau
makro. Berikut cara penulisan dan contoh :
Penulisan: #include<………… .h>
#define identifier konstanta
Contoh: #include<atmega16.h>
#include<delay.h>
#include<stdio.h>
#define IRsensor PINA.0
#define motor PINB.1
23
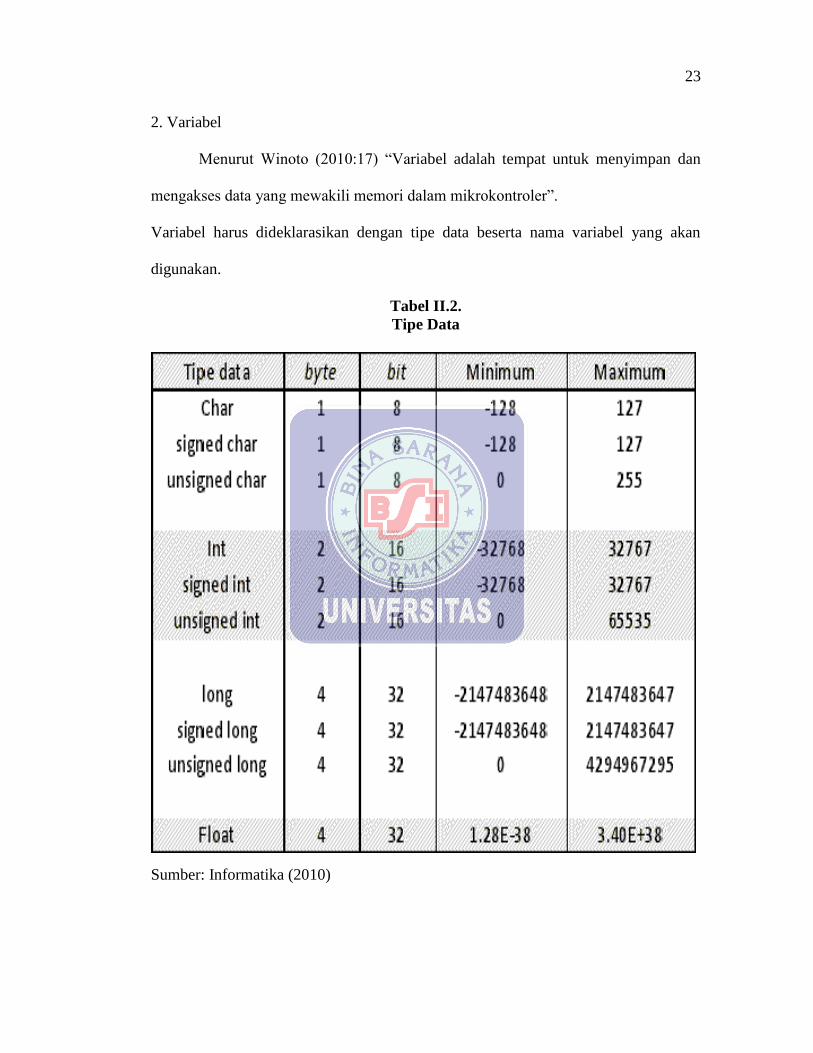
2. Variabel
Menurut Winoto (2010:17) “Variabel adalah tempat untuk menyimpan dan
mengakses data yang mewakili memori dalam mikrokontroler”.
Variabel harus dideklarasikan dengan tipe data beserta nama variabel yang akan
digunakan.
Tabel II.2.
Tipe Data
Sumber: Informatika (2010)
24
3. Larik (Array)
Menurut Winoto (2010:23) “Array adalah variabel yang berisi sekumpulan
data yang mempunyai tipe data yang sama berbentuk matrik tunggal atau matrik
multidimensional”.
4. Control Aliran Program
Dalam bahasa C control aliran program dibagi menjadi dua yaitu sebagai berikut:
a. Percabangan
1) IF(…)(…)
Digunakan untuk mengecek satu kondisi untuk satu blok jawaban.
2) IF(…)(…) else (…)
Digunakan untuk mengecek suatu kondisi untuk dua blok jawaban.
b. Pengulangan
1) While (…)(…)
Digunakan untuk perulangan atau loopingi jika kondisi yang diiuji bernilai
benar.
2) Do(…)While(…)
Digunakan untuk perulangan atau looping jika kondisi yang di uji benar.
Perbedaannya dengan while tanpa do adalah blok dieksekusi terlebih dahulu
setelah itu baru diuji.
3) For(…;….;…)…
For digunakan untuk perulangan atau looping dengan kondisi dan syarat yang
telah ditentukan.
25
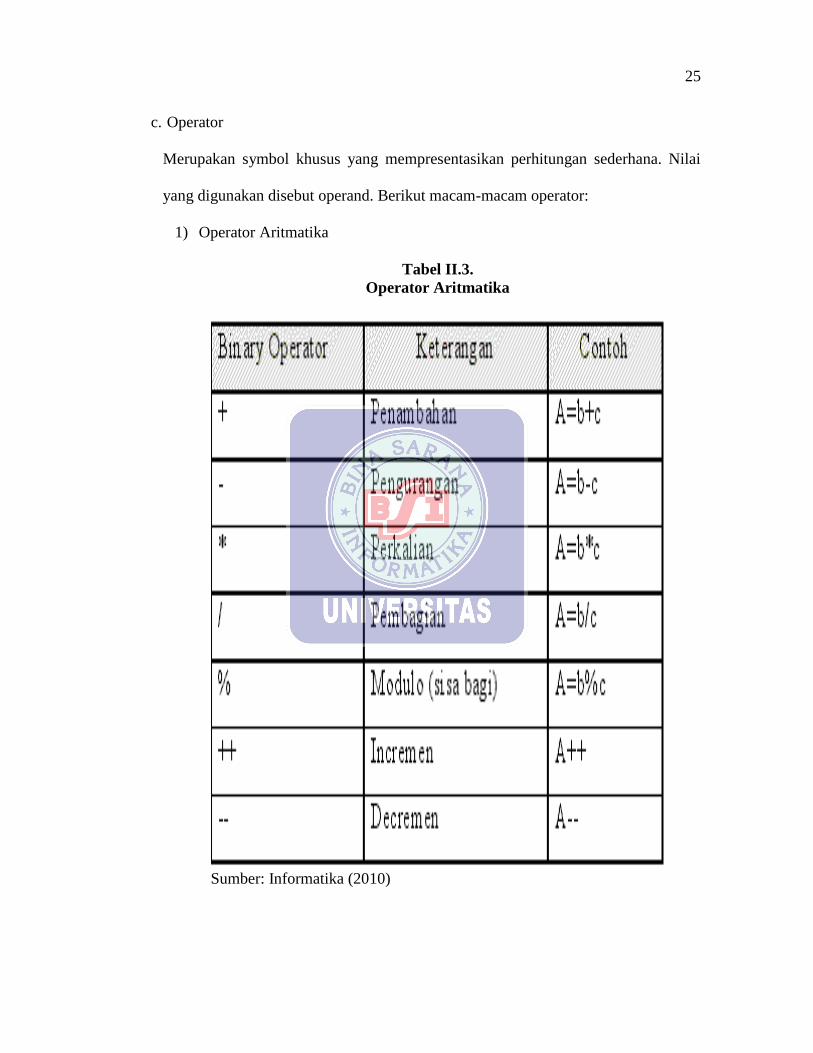
c. Operator
Merupakan symbol khusus yang mempresentasikan perhitungan sederhana. Nilai
yang digunakan disebut operand. Berikut macam-macam operator:
1) Operator Aritmatika
Tabel II.3.
Operator Aritmatika
Sumber: Informatika (2010)
26
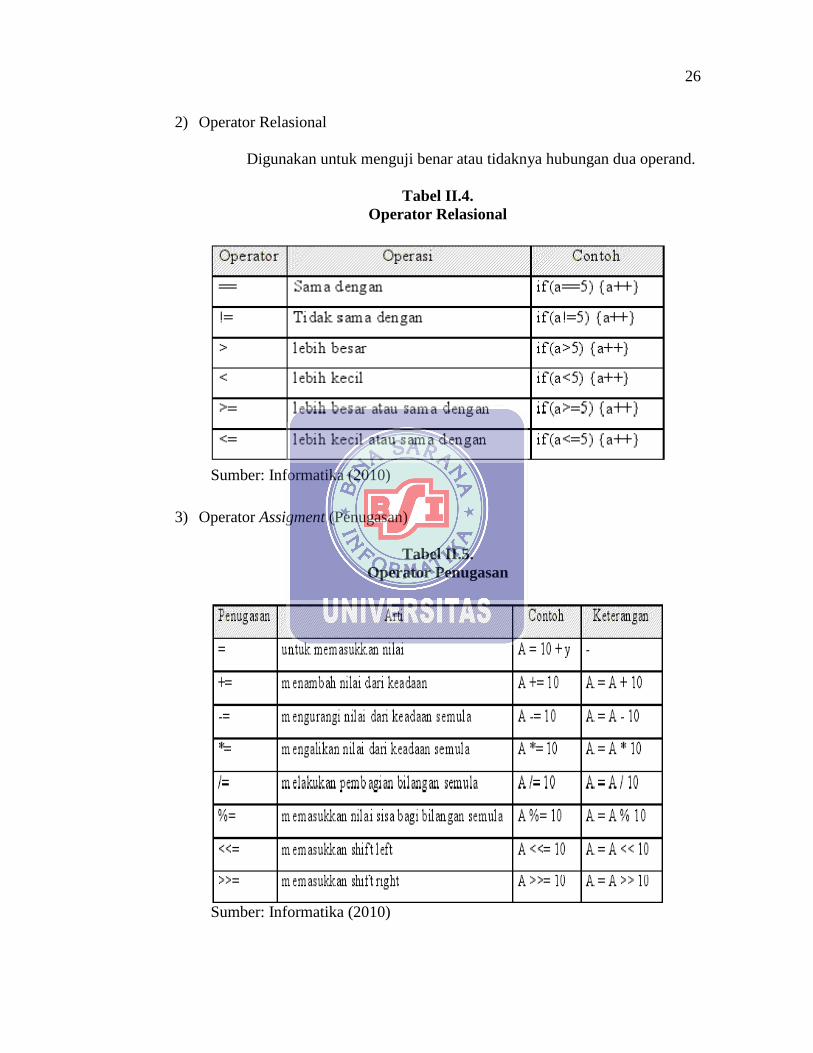
2) Operator Relasional
Digunakan untuk menguji benar atau tidaknya hubungan dua operand.
Tabel II.4.
Operator Relasional
Sumber: Informatika (2010)
3) Operator Assigment (Penugasan)
Tabel II.5.
Operator Penugasan
Sumber: Informatika (2010)
27
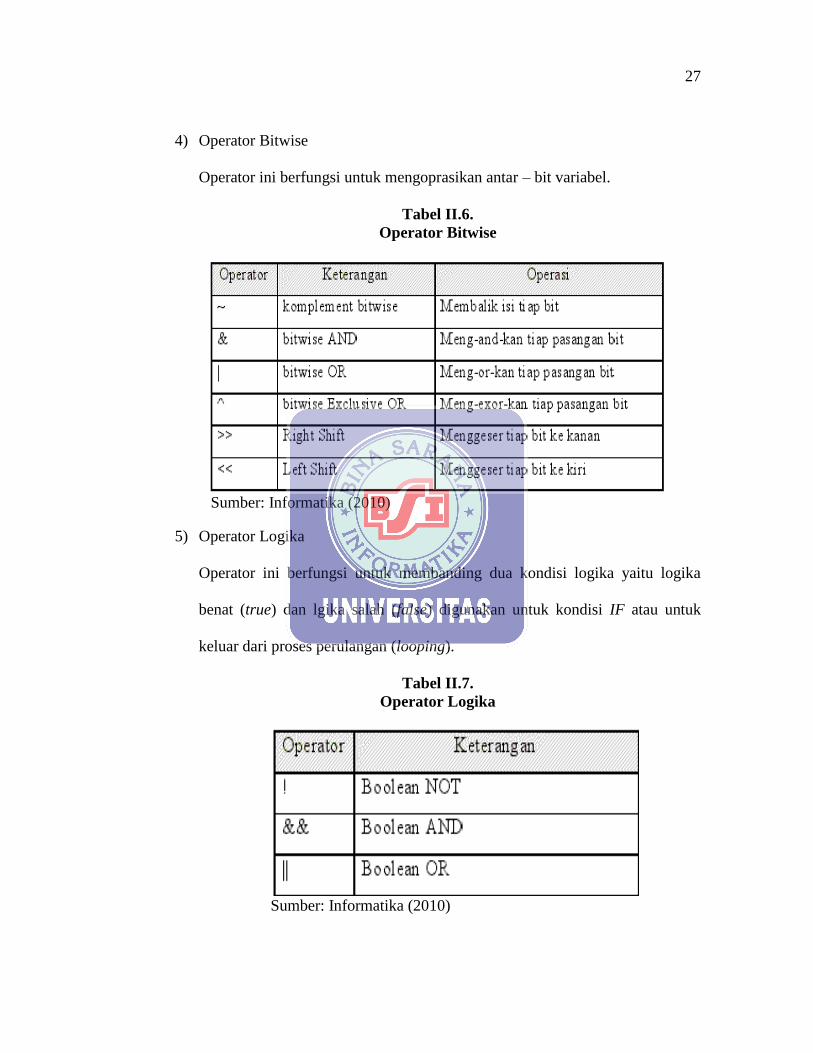
4) Operator Bitwise
Operator ini berfungsi untuk mengoprasikan antar – bit variabel.
Tabel II.6.
Operator Bitwise
Sumber: Informatika (2010)
5) Operator Logika
Operator ini berfungsi untuk membanding dua kondisi logika yaitu logika
benat (true) dan lgika salah (false) digunakan untuk kondisi IF atau untuk
keluar dari proses perulangan (looping).
Tabel II.7.
Operator Logika
Sumber: Informatika (2010)
28
Contoh penggunaan Operator Logika
#include <iostream.h>
#include <conio.h>
#include <stdio.h>
void main()
int jml=3;
cout << "Datanya: " << jml << "\n";
cout << "Jika jml>=1 && jml<=5 hasilnya: " << ((jml>=1) && (jml<=5));
getch();