bab i pendahuluan -...
TRANSCRIPT

1
BAB I
PENDAHULUAN
I.1. Latar Belakang
Salah satu tujuan survei hidrografi adalah untuk memetakan topografi dasar
laut dan perairan lainnya atau secara spesifik disebut sebagai pemetaan batimetri.
Pemetaan batimetri merupakan keperluan mendasar dalam rangka penyediaan
informasi spasial untuk kegiatan, perencanaan dan pengambilan keputusan yang
berkaitan dengan informasi di bidang kelautan (Soeprapto, 2001). Survei batimetri
dilakukan dengan cara mengukur kedalaman pada titik-titik tertentu berdasarkan
jalur yang telah direncanakan. Sebelum pengukuran harus dibuat rencana jalur survei
sesuai wilayah yang akan dipetakan, agar kerepetan data yang diperoleh memenuhi
syarat skala peta yang akan dihasilkan dan syarat lainnya. Sementara itu, pengukuran
posisi titik dan kedalaman dilakukan secara serentak sehingga diperoleh data
koordinat 3D (X, Y, dan Z) pada tiap titik dasar perairan yang diukur.
Peralatan dan metode yang digunakan dalam pemetaan dasar perairan
bermacam-macam jenisnya, secara umum berbasis pada sistem akustik sebagai
pengukur kedalaman dan dikombinasikan dengan metode penentuan posisi. Jenis alat
akustik yang dapat digunakan untuk survei hidrografi adalah jenis Singebeam
Echosounder dan Multibeam Echosounder (Anonim, 2008), sementara peralatan
penentuan posisi yang dapat digunakan adalah GPS (Abidin, 2007), peralatan
Echosounder dan GPS dipasang secara bersama pada kapal survei. Saat melakukan
pemeruman, kapal survei akan bergerak maju, akibatnya dapat menyebabkan adanya
kesalahan teknis. Berdasarkan ketentuan SNI 7646:2010 (Anonim, 2010) tentang
survei menggunakan Singlebeam Echosounder menyebutkan bahwa besar kecepatan
kapal pada survei batimetri tidak boleh melebihi 7 knot (≈ 3,5 m/s). Menurut aturan
ini kecepatan kapal dapat menyebabkan adanya kesalahan squat dan settlement.
Squat adalah keadaan dimana haluan kapat lebih tenggelam saat menyesuaikan
kecepatannya, sedangkan settlement adalah sifat wahana terapung yang posisinya
akan lebih tenggelam saat diam daripada saat bergerak. Kesalahan squat dan
1

2
settlement bersifat teknis, namun itu menunjukkan bahwa secara nyata kecepatan
gerak kapal memang memberikan pengaruh pada hasil pengukuran.
Selain kesalahan squat dan settlement terdapat pula kesalahan sistematis.
Secara matematis kecepatan menyebabkan arah pancaran gelombang suara tidak
merambat vertikal, atau ada selang waktu yang menyebabkan kapal telah bergerak
maju ketika gelombang suaranya merambat pergi pulang. Akibatnya ukuran
kedalaman yang dihasilkan tidak vertikal sedangkan posisi saat awal gelombang
dipancarkan berbeda dengan posisi saat gelombang diterima. Prinsipnya kecepatan
kapal akan menyebabkan beda kerangka acuan sehingga nlai besaran ukuran berbeda
dengan kerangka acuan bumi (diam), atau dalam hal ini terdapat kesalahan
matematis terhadap hasil pengukuran alat Singlebeam Echosounder yang diakibatkan
oleh gerak kapal.
Permasalahan ini dianggap layak untuk diangkat sebagai topik penelitian ini,
dengan alasan yang mendasarinya adalah untuk mengkaji perbedaan sistem kerangka
acuan akibat kecepatan kapal pada proses survei batimetri menggunakan alat
Singlebeam Echosounder dan melakukan perhitungan koreksi terhadap kesalahan
akibat kecepatan kapal. Oleh karena itulah penelitian ini dilakukan dengan maksud
memasukkan kecepatan kapal sebagai parameter yang berpengaruh pada hasil
pengukuran, disesuaikan dengan konsep hukum gerak dan kerangka acuan. Pengaruh
kecepatan dan kesalahan yang terjadi pada pengukuran posisi horizontal maupun
pengukuran kedalaman menjadi bahan analisis pada penelitian ini.
I.2. Rumusan Masalah
Permasalahan yang menjadi kajian dalam penelitian ini adalah faktor
kecepatan kapal (bentuk gerak relatif) yang dapat memberi pengaruh kesalahan
besaran-besaran ukuran. Gerak kecepatan kapal terjadi pada saat dilakukan
pengukuran posisi dan kedalaman titik perum, karena dalam pengukuran titik perum
kapal harus bergerak melintasi jalur-jalur ditentukan yang menyebar pada wilayah
survei. Berdasarkan teori gerak, kecepatan kapal mempengaruhi hasil pengukuran
diakibatkan perbedaan kerangka acuan pengamatan atau dengan kata lain
menyebabkan beda nilai besaran jika dibandingkan dengan pengamat diam.

3
Pengaruh tersebut dapat menjadi masalah, sebab dalam pemetaan besaran-besaran
(koordinat) yang diukur dan digambarkan adalah besaran berdasarkan kerangka
acuan bumi (diam). Permasalahan penelitian ini secara umum terangkum dalam 2
pertanyaan di bawah ini:
1. Bagaimana kecepatan kapal mempengaruhi hasil pengukuran survei
hidrografi dengan alat Singlebeam Echosounder jika ditinjau secara
matematis?
2. Bagaimana cara pengolahan hasil ukuran tersebut agar sesuai dengan prinsip-
prinsip pemetaan?
1.3. Tujuan Penelitian
Hal-hal yang menjadi tujuan penelitian ini adalah:
1. Perhitungan koreksi hasil pengukuran Singlebeam Echosounder dari
kesalahan matematis yang disebabkan oleh pengaruh kecepatan kapal.
2. Analisis terhadap hasil pengujian statistik dari kesalahan yang disebabkan
oleh pengaruh kecepatan kapal untuk dibandingkan dengan hipotesis.
3. Penentuan dan penganalisisan pola kesalahan akibat kecepatan kapal
berdasarkan faktor nilai ukuran kedalaman dan nilai kecepatan kapal itu
sendiri.
I.4. Manfaat Penelitian
Hasil penelitian yang dilakukan diharapkan menjadi suatu penghubung antara
teori gerak (fisika) dengan teknis pelaksanaan survei hidrografi, dalam hal ini adalah
kaitan antara pengaruh kecepatan kapal dengan proses pemeruman menggunakan
Singlebeam Echosounder. Sehingga penelitian ini dapat memberikan informasi dan
menjelaskan hasil analisis tentang kesalahan sistematis yang diakibatkan oleh faktor
kecepatan kapal.

4
I.5. Batasan Masalah
Lingkup penelitian yang dilakukan adalah hitungan pengaruh kecepatan kapal
terhadap nilai ukuran hasil survei dengan menganggap terdapat kesalahan sistematis.
Agar dapat mengetahui pengaruh tersebut, nilai ukuran hasil survei dengan nilai yang
telah dikoreksi akan dianalisis dan diuji secara statistik. Sedangkan lingkup batasan
masalah yang dikerjakan dan berkaitan dengan spesifikasi data adalah sebagai
berikut:
1. Data ukuran yang digunakan merupakan hasil pengukuran dengan alat
berjenis Singlebeam Echosounder tipe Fishfinder GARMIN MAP Sounder
178C yang terintegrasi dengan antena GPS, alat merupakan milik
laboratorium hidrografi jurusan Teknik Geodesi dan Geomatika Fakultas
Teknik, Universitas Gadjah Mada. Lokasi pengukuran adalah waduk Sermo
di Dusun Sermo, Desa Hargowilis, Kecamatan Kokap, Kabupaten Kulon
Progo, Yogyakarta. Pengukuran dilakukan dengan beberapa sesi yang
berbeda pada bulan Desember 2011.
2. Ketelitian ukuran posisi GPS diketahui berdasarkan spesifikasi alat (jenis
receiver) dan metode pengukuran yang dilakukan, yaitu secara metode
absolut yang dapat diperoleh ketelitian hingga ± 3 m, tetapi karena
pembagian tingkat ketelitian mengacu pada orde pengukuran yang terdapat
dalam SNI 7646:2010 tentang survei hidrografi menggunakan Singlebeam
Echosounder, maka diasumsikan ketelitian GPS masuk dalam orde 1 (± 2 m).
3. Ketelitian kedalaman diketahui dari rumus pemodelan varian ukuran jarak
yang mengacu pada informasi standar alat Echosounder yang digunakan.
4. Berkaitan dengan akurasi nilai ukuran kedalaman, nilai kecepatan suara yang
digunakan adalah sesuai standar sebesar 1500 m/s, tanpa dilakukan koreksi
Barcheck, karena tidak mempengaruhi tujuan penetian ini. Meskipun
idealnya koreksi Barcheck harus dilakukan untuk memperoleh nilai
kedalaman yang akurat saat pembuatan peta.
5. Posisi 2D hasil pengukuran GPS adalah dalam nilai koordinat proyeksi UTM
(Universal Transverse Mercator).

5
6. Parameter kecepatan dan azimuth diturunkan berdasarkan beda posisi (jarak)
dan waktu antar titik, sehingga yang diperoleh hanya nilai rata-rata pada tiap
antar posisi bukan nilai sesaat di suatu posisi (realtime).
I.6. Tinjauan Pustaka
Beberapa penelitian lain yang pernah dilakukan berkaitan dengan alat
Echosounder dan hasil analisisnya antara lain:
Knudsen (2009) melakukan penelitian tentang kinerja jangka panjang
penggunaan Echosounder, berkaitan dengan tren semakin baiknya metode kalibrasi
selama 3 dekade terakhir. Kesimpulan utama dari penelitian ini adalah akurasi
pengukuran Echosounder berpotensi ditingkatkan dengan memeriksa nilai kecepatan
suara pada jarak dekat dari transducer, sehingga secara otomatis dapat diketahui
variasi kecepatan suara terhadap EBA. Kalibrasi perlu dilakukan karena transducer
rentan dari kerusakan teknis dan penuaan atau bahkan kombinasi keduanya. Oleh
karena itu kalibrasi alat penting dilakukan secara rutin, dengan personel dan lokasi
yang berbeda (independen).
Menurut penelitian Pramanda (2013), yang melakukan pengujian kedalaman
antara alat Singlebeam Echosounder ODOM Hydrotrac II dengan Fishfinder
GARMIN Map Sounder 178C untuk tingkat kepercayaan 95% (-1,96 < to < +1,96)
menyebutkan bahwa: “secara statistik berbeda signifikan dengan data kedalaman
hasil pengukuran Fishfinder saat posisi transducer berdampingan. Sedangkan saat
posisi transducer berseberangan, data kedalaman hasil pengukuran Echosounder
ODOM tidak berbeda signifikan dengan data kedalaman hasil pengukuran
Fishfinder”. Penyebabnya adalah kepresisian data yang diperoleh, untuk posisi
transducer berdampingan standar deviasi beda kedalaman yang diperoleh lebih
tinggi (± 0,280 m) daripada posisi transducer berseberangan (± 0,456 m), sehingga
untuk tingkat kepresisian menentukan hasil pengujian statistik, karena semakin
presisi suatu data maka semakin terlihat perbedaannya (secara statistik) dengan
kelompok data lain.
Penelitian lain yang berkaitan dengan jenis alat Singlebeam Echosounder
berjenis Odom Hydrotrac II dilakukan oleh Septiyadi (2013). Penelitiannya

6
dilakukan dengan cara mengintegrasikankan menjadi satu sistem antara alat Odom
Hydrotrac II dengan Software Hydropro version 2.40 untuk melakukan survei
batimetri. Data hasil pengukuran dilakukan uji statistik dengan tingkat kepercayaan
95% (±1,96σ), dari dat diperoleh nilai mean error sebesar 0,036 m, nilai standar
deviasi (σ) beda kedalaman sebesar ±0,195 m dan nilai to sebesar 1,16. Sehingga
nilai to masih di bawah batas toleransi ±1,96. Kesimpulan penelitian ini adalah data
ukuran kedalaman yang diperoleh dari sistem Odom Hydrotrac II dengan Software
Hydropro masuk batas toleransi pada tingkat kepercayaan 95%.
Penelitian berkaitan dengan penentuan posisi horizontal yang menggunakan
alat Echosounder tipe Fishfinder GARMIN MAP Sounder 178C juga pernah
dilakukan oleh Mahbub (2011). Penelitiannya dilakukan dengan cara mengatur
pengukuran posisi GPS pada Fishfinder dari pengukuran absolut menjadi diferensial
(pengukuran relatif) metode NTRIP (Networked Transport of RTCM via Internet
Protocol), dan NTRIP akan terhubung dengan stasiun GNSS CORS. Sehingga
dibandingkan antara hasil pengukuran diferensial dengan metode absolut. Hasil
penelitian menunjukkan bahwa perbedaan metode pengukuran menunjukkan
perbedaan bentuk terrain dari dasar waduk Sermo, yaitu hasil cut and fill antara
DTM (Digital Terrain Model) yang dihasilkan dari data pengukuran metode
diferensial dengan DTM yang dihasilkan dari data pengukuran metode absolut
memiliki perbedaan yang cukup signifikan, dengan selisih volume waduk mencapai
98795,72 m3. Hasil penelitian Mahbub (2011) menunjukkan bahwa metode
pengukuran GPS merupakan faktor penentu nilai ketelitian posisi yang akan
dihasilkan, yaitu diperoleh ketelitian metode diferensial dapat mencapai ± 1 m
sedangkan metode absolut disebutkan hanya sekitar ± 6 m.
Hasil penelitian Lamarolla (2013) dengan jumlah sampel data yang
bertampalan ada 16 data, data yang masuk dalam ketelitian orde khusus ada 7
sampel, sedangkan data yang masuk kedalam ketelitian orde 1 ada 8 sampel, dan
untuk orde 2 ada 1 sampel. Standar deviasi terkecil terjadi pada data titik nomor 11
s/d 649 yaitu ±0,11467 m, dan standar deviasi terbesar terjadi di titik nomor 16 s/d
645 yaitu ±0,5125 m. Mengacu pada ketelitian pembuatan Peta Dasar Lingkungan
Pantai Indonesia, alat Fishfinder Garmin GPS Map 420S dapat direkomendasikan

7
untuk pembuatan Peta Dasar Lingkungan Indonesia pada perairan yang relatif
dangkal. Alat ini memenuhi nilai ketelitian yang mencapai syarat orde 1.
I.7. Landasan Teori
I.7.1. Survei Hidrografi
Survei Hidrografi berkaitan dengan perairan, baik berupa kenampakan fisik
terrain dasar perairan, fisis dan kimiawi airnya maupun dinamika perairan tersebut
seperti pasut dan gelombang. Elemen-elemen penting dari survei hidrografi yang
akan dibahas dalam penelitian ini antara lain:
1.7.1.1. Echo Sounder
Suatu alat yang digunakan untuk mengukur kedalaman air dengan cara
memancarkan gelombang akustik dan mencatat interval waktu pemancaran dan
waktu penerimaan. Sistem Echosounder pada umumnya terdiri dari catu daya untuk
menyuplai kebutuhan energi listrik alat, seperangkat perekam data, transducer
(pemancar) dan hidrofon (penerima). Cara kerja dari sistem ini mirip dengan sistem
indera akustik pada Lumba-Lumba dan Paus, yaitu ada bagian/organ yang
memancarkan gelombang suara (SONAR) ke suatu objek (mangsa) lalu dipantulkan
dan diterima lagi untuk diterjemahkan oleh otak, sehingga dapat diketahui posisi
objek tersebut. Pada alat Echosounder, bagian transducer berfungsi untuk
memancarkan gelombang suara dengan frekuensi tertentu menuju ke dasar perairan
secara vertikal, kemudian gelombang tersebut dipantulkan kembali dan diterima oleh
hidrofon. Umumnya semakin kecil frekuensinya, kedalaman perairan yang dapat
ditembus akan semakin tinggi. Data yang diperoleh dari proses itu adalah selang
waktu gelombang mulai dipancarkan dan gelombang kembali diterima, sehingga data
kedalaman yang diperoleh alat perekam merupakan fungsi dari selang waktu dan
kecepatan rambat gelombang suara. Sebagaimana yang diuraikan dalam persamaan
hitungan dasar yang digunakan untuk menentukan kedalaman perairan sebagai
berikut (Soeprapto, 2001):
∆h’ = vs.dt ...………...................................................................( I.1)
8
Keterangan :
∆h’ : kedalaman dasar perairan yang diukur pada saat pengukuran
vs : cepat rambat gelombang suara di air
: waktu pada saat gelombang suara dipancarkan
: waktu pada saat penerimaan gelombang pantulnya
Umumnya nilai kecepatan rambat gelombang suara (vs) di air adalah 1500 m/s dan
bila beda waktu diketahui, maka nilai kedalaman perairan dapat ditentukan
(berdasarkan persamaan I.1.) dengan rumus berikut ini (Soeprapto, 2001):
∆h’ = (vs.∆t) …………................................................................... (I.2)
Keterangan :
∆h’ : kedalaman dasar perairan yang diukur pada saat pengukuran
vs : cepat rambat gelombang akustik di medium air
Δt : selang waktu pergi pulang gelombang suara, yaitu saat dipancarkan
sampai diterima lagi
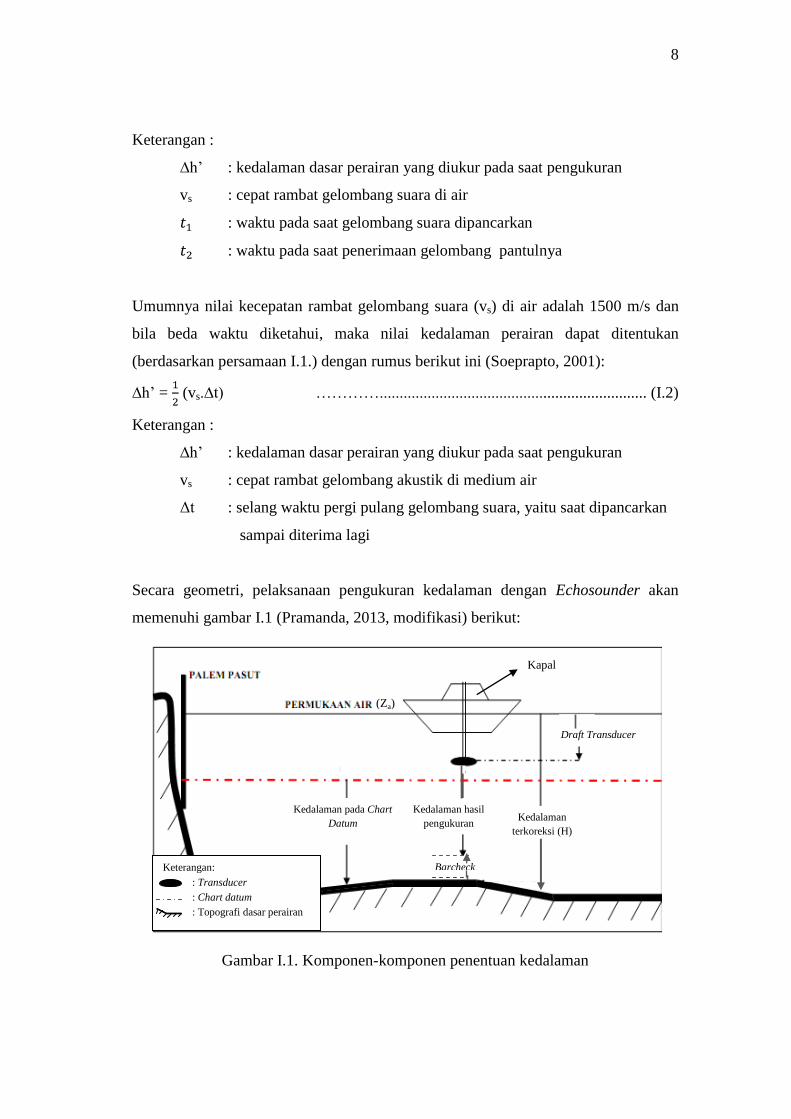
Secara geometri, pelaksanaan pengukuran kedalaman dengan Echosounder akan
memenuhi gambar I.1 (Pramanda, 2013, modifikasi) berikut:
Gambar I.1. Komponen-komponen penentuan kedalaman
Draft Transducer
(Za)
Kedalaman hasil
pengukuran Kedalaman
terkoreksi (H)
Kedalaman pada Chart
Datum
Barcheck Keterangan:
: Transducer
: Chart datum
: Topografi dasar perairan
Kapal

9
Koreksi Draft Transducer adalah koreksi terhadap besarnya nilai panjang
tenggelamnya alat (posisi Transducer) dari permukaan air. Nilai ini dapat diketahui
dengan cara mengukur atau mengatur jarak tenggelamnya Transducer yang dipasang
pada tongkat. Sedangkan koreksi Barcheck berhubungan dengan pengaturan cepat
rambat gelombang suara. Pengaturan cepat rambat gelombang suara pada alat
biasanya diatur dengan nilai tertentu (standarnya 1500 m/s), tetapi pada
kenyataannya kecepatan perambatan gelombang suara tidak selalu sama dengan nilai
pengaturan alat karena bermacam faktor pada perairan lokasi pengukuran yang
mempengaruhi perambatan suara, proses kalibrasi untuk mengoreksi ketidaktepatan
besarnya nilai kecepatan suara inilah yang dimaksud Barcheck. Sehingga nilai dari
komponen kedalaman terkoreksi yang dianggap benar merupakan nilai hasil ukuran
alat Echosounder yang dikoreksi Barcheck dan koreksi Draft Transducer. Nilai
inilah yang akan digunakan untuk menentukan besarnya nilai kedalaman berdasarkan
bidang acuan atau chart datum seperti pada gambar I.1.
1.7.1.2. Chart Datum
Chart Datum merupakan acuan ketinggian vertikal muka perairan yang
dipakai sebagai referensi tinggi sebesar 0 m, untuk peta wilayah dasar laut tinggi
bidang referensi yang digunakan adalah muka air terendah atau Lowest Low Water
(LWS). Tujuan penggunaan LWS adalah untuk mendukung keperluan pelayaran
sehingga kapal-kapal tidak terdampar dan karam karena terjebak di daerah yang
menjadi kering saat LWS terjadi. Contoh lain penggunaan LWS adalah untuk
penentuan garis pangkal yang menjadi acuan penarikan batas-batas wilayah laut
suatu negara.
Selain LWS, ada pula muka laut rerata atau Mean Sea Level (MSL) sebagai
datum vertikal. Menurut IHO Dictionary, S-32 edisi kelima (Poerbandono, dkk,
2005), MSL merupakan nilai rata-rata tinggi muka air laut yang diperoleh dari
stasiun pengamatan pasut selama 19 tahun sehingga mencakup semua siklus pasang
surut yang terjadi. MSL biasanya dianggap berimpit dengan bidang Geoid sehingga
digunakan sebagai referensi tinggi untuk pemetaan di darat. Di daerah danau atau
perairan darat lain, penentuan referensi tingginya dapat menggunakan acuan tinggi
muka perairannya (chart datum lokal) atau tingginya diikatkan ke referensi
10
MSL/Geoid sama dengan pemetaan daratan. Pada pekerjaan penelitian ini, nilai
koordinat Z diikatkan dari referensi BM yang mengacu pada tinggi dari MSL, jika
merujuk ke gambar I.1 maka rumus menghitung Z adalah:
Z = Za – H ……….……………………………………………(I.3)
Keterangan:
Z : ketinggian titik yang terukur kedalamannya
Za : ketinggian muka perairan saat pengukuran
H : kedalaman terkoreksi (dianggap benar)
1.7.1.3. Penentuan posisi dengan GPS
GPS merupakan suatu sistem penentuan posisi atau navigasi berbasis satelit
yang dimiliki dan dikelola oleh Amerika Serikat (Abidin, 1999). Selain GPS ada
pula sistem navigasi satelit yang dikembangkan oleh negara-negara lain. Cara
penentuan posisi sistem ini adalah dengan metode pengukuran jarak antar titik
dengan satelit yang diketahui posisinya (pemotongan ke belakang). 3 buah
pengukuran jarak sudah cukup untuk mengikat posisi suatu titik di ata permukaan
bumi, tetapi 4 ukuran jarak diperlukan untuk menghilangkan bias jam receiver
(Abidin, 1999). Sementara metode-metode pengukuran GPS ada 2 macam, yaitu
pengukuran absolut dan relatif. Pengukuran absolut adalah pengukuran langsung
posisi suatu titik dengan ukuran-ukuran jarak terhadap satelit, menurut Abidin (1999)
metode pengukuran absolut ini adalah metode penentuan posisi yang paling
mendasar dari GPS. Sedangkan metode pengukuran relatif, posisi suatu titik
ditentukan secara relatif terhadap titik lain yang telah diketahui koordinatnya.
Tujuannya adalah untuk mengeliminir bermacam bias yang tidak dapat dikoreksi
dengan pengukuran absolut, terutama bias yang disebabkan oleh kondisi atmosfer.
Dengan demikian akurasi pengukuran relatif lebih baik daripada pengukuran absolut.
Sistem koordinat yang diperoleh dari pengukuran GPS adalah koordinat
kartesi 3D (x, y, z) geosentris atau pusat sistem berimpit dengan pusat masssa bumi.
Sedangkan sistem koordinat kutub (φ, λ, h) atau geodetis mengacu pada bidang
referensi WGS 84’ (Abidin, 1999), dengan nilai parameter a dan b masing-masing
adalah 6378137 m dan 6356752,3 m. Metode pengukuran absolut pada GPS dengan

11
4 pengukuran jarak (l1, l2, l3, l4) dari satelit beserta sistem koordinatnya pada
pekerjaan survei hidrografi ditunjukkan pada gambar I.2 di berikut ini:
Gambar I.2. Pengukuran koordinat survei hidrografi menggunakan sistem GPS
Posisi horintal yang dapat diberikan dengan GPS adalah nilai koordinat
berdasarkan bidang proyeksi peta sistem proyeksi UTM. Koordinat yang diukur
langsung oleh GPS sebenarnya adalah koordinat kartesi 3D geosentris yang
kemudian dapat ditransformasikan ke dalam nilai koordinat geodetis dengan datum
acuan WGS 84’ (Abidin, 1999). Nilai koordinat geodetis inilah yang digunakan
untuk menghitung nilai koordinat pada bidang proyeksi UTM. Kaitan
penggunaannya pada survei hidrografi, terkhusus pada alat Singlebeam Echosounder,
teknologi GPS yang digunakan merupakan receiver tipe navigasi dengan penentuan
posisi secara absolut, tetapi alat ini dilengkapi dengan fasilitas DGPS sebagai koreksi
dan output. Fasilitas ini berguna untuk melakukan koneksi terhadap yang dapat
Y(+)
Z(+)
X(+)
O b
a
Meridian standar
Kutub utara
kapal
Meridian pengamat
λ
φ
Antena GPS
Permukaan air
Topografi dasar perairan
Satelit
(posisi fix)
y x
z Garis singgung
l1 l2 l3 l4

12
mengirimkan koreksi, sehingga proses penentuan posisi selanjutnya tidak lagi secara
absolut melainkan secara relatif. Ketelitian pengukuran GPS yang dapat digunakan
dalam survei hidrografi berdasarkan metode pengukuran disajikan dalam tabel I.1
berikut (Abidin, 2007):
Tabel I.1. Ketelitian Metode Pengukuran GPS
No Jenis pengukuran Ketelitian
1 Absolute GPS Kinematic Positionimg 5 m s/d 10 m
2 DGPS (pseudorange) 1 m s/d 3 m
3
Differential GPS kinematic
Positionimg (off line)
1 cm s/d 5 cm
4 Real Time Kinematic (RTK) 1 cm s/d 5 cm
Masalah yang dapat muncul ketika melakukan penentuan posisi titik perum
dengan GPS dan pengukuran kedalaman dengan Echosounder adalah ketidaksamaan
waktu antara pengamatan satelit GPS dengan waktu proses sounding fix perum
(Abidin, 2007). Sehingga saat pemeruman harus diperhatikan untuk mengatur
keserentakan antara pengukuran GPS dan pengukuran kedalaman, yaitu diatur untuk
sstem waktu GMT dengan selang waktu tertentu untuk pengukuran tiap titik perum.
Selain itu pemasangan posisi antena GPS dengan Transducer juga harus diperhatikan
(offset), posisi keduanya dapat dipasang sejajar dalam satu garis vetikal, sehingga
hasil ukuan posisi (2D) dengan GPS dianggap sama dengan posisi (2D) titik perum
yang diukur kedalamannya.
I.7.2. Orde Ketelitian Survei Hidrografi
SNI survei hidrografi menggunakan Singlebeam Echosounder (kode:
7646:2010) yang dikeluarkan oleh Badan Standarisasi Nasional (BSN) tahun 2010
memuat teknis pelaksanaan survei dengan standar klasifikasi derajat ketelitian yang
harus dicapai dan standar tersebut dibagi menjadi beberapa orde sebagai berikut:
a. Orde khusus (Anonim, 2010)
Orde khusus survei hidrografi adalah orde yang memiliki standar ketelitian
tertinggi hingga mendekati ketelitian survei rekayasa dan digunakan secara terbatas
di daerah-daerah kritis yaitu dengan informasi kedalaman di bawah laut sangat
minim atau dalam hal ini karakteristik dasar perairannya berpotensi membahayakan

13
kapal. Daerah-daerah kritis tersebut ditentukan secara langsung oleh instansi yang
bertanggung jawab di dalam masalah kualitas survei. Sebagai contoh ialah
pelabuhan-pelabuhan tempat sandar dan alur masuknya kapal. Semua sumber
kesalahan harus dibuat minimal. Orde khusus memerlukan penggunaan yang
berkaitan dengan Side Scan Sonar, Multi Transducer Arrays Atau Multibeam
Echosounder dengan resolusi tinggi dengan jarak antar lajur perum yang rapat untuk
mendapatkan gambaran dasar air 100% (semua area terliput survei) dan harus pula
dipastikan bahwa setiap benda dengan ukuran lebih besar dari 1 meter persegi dapat
dicakup oleh kemampuan peralatan perum yang digunakan. Penggunaan Side Scan
Sonar dan Multibeam Echosounder mungkin diperlukan di daerah-daerah yang di
dalamnya mungkin ditemukan benda-benda kecil dan rintangan bahaya, atau survei
untuk keperluan investigasi.
b. Orde satu (Anonim, 2010)
Orde satu survei hidrografi diperuntukkan bagi pelabuhan-pelabuhan, alur
pendekat, haluan yang dianjurkan, alur navigasi dan daerah pantai dengan lalu lintas
komersial yang padat, dalam hal ini adalah kedalaman bawah laut dengan luas yang
cukup memadai dan kondisi geofisik dasar lautnya tidak begitu membahayakan kapal
(misalnya lumpur atau pasir). Survei orde satu berlaku terbatas di daerah dengan
kedalaman kurang dari 100 meter. Meskipun persyaratan pemeriksaan dasar laut
tidak begitu ketat jika dibandingkan orde khusus, namun pemeriksaan dasar laut
secara menyeluruh tetap diperlukan di daerah-daerah di dalam hal ini karakteristik
dasar laut dan resiko adanya rintangan berpotensi membahayakan kapal. Pada
daerah-daerah yang diteliti tersebut, harus diyakinkan bahwa untuk kedalaman
sampai dengan 40 meter benda-benda dengan ukuran lebih besar dari 2 meter
persegi, atau pada kedalaman lebih dari 40 meter, benda-benda dengan ukuran 10%
dari kedalaman harus dapat digambarkan oleh peralatan perum yang digunakan.
c. Orde dua (Anonim, 2010)
Orde dua survei hidrografi diperuntukkan di daerah dengan kedalaman
kurang dari 200 meter yang tidak termasuk di dalam orde khusus maupun orde satu,
dan dalam hal ini gambaran batimetri secara umum sudah mencukupi untuk
meyakinkan bahwa tidak terdapat rintangan di dasar laut yang akan membahayakan
tipe kapal yang lewat atau bekerja di daerah tersebut. Hal ini merupakan kriteria
14
yang penggunaannya di bidang kelautan, sangat beraneka ragam, di dalam hal ini
orde hidrografi yang lebih tinggi tidak dapat diberlakukan. Pemeriksaan dasar laut
mungkin diperlukan pada daerah-daerah di dalam hal ini karakteristik dasar air dan
resiko adanya rintangan berpotensi membahayakan kapal
d. Orde tiga (Anonim, 2010)
Orde tiga survei hidrografi diperuntukkan untuk semua area yang tidak
tercakup oleh orde khusus, orde satu dan orde dua, yaitu pada area dengan
kedalaman lebih dari 200 meter.
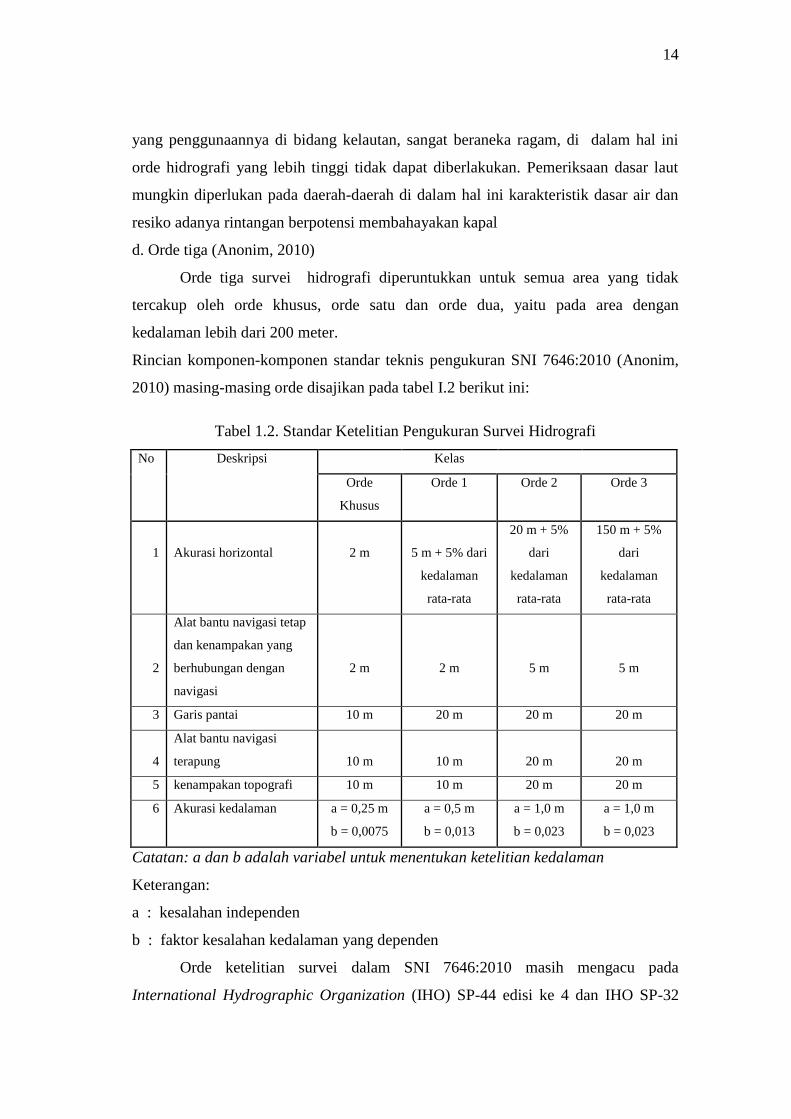
Rincian komponen-komponen standar teknis pengukuran SNI 7646:2010 (Anonim,
2010) masing-masing orde disajikan pada tabel I.2 berikut ini:
Tabel 1.2. Standar Ketelitian Pengukuran Survei Hidrografi
No Deskripsi
Kelas
Orde
Khusus
Orde 1
Orde 2
Orde 3
1
Akurasi horizontal
2 m
5 m + 5% dari
kedalaman
rata-rata
20 m + 5%
dari
kedalaman
rata-rata
150 m + 5%
dari
kedalaman
rata-rata
2
Alat bantu navigasi tetap
dan kenampakan yang
berhubungan dengan
navigasi
2 m
2 m
5 m
5 m
3 Garis pantai 10 m 20 m 20 m 20 m
4
Alat bantu navigasi
terapung 10 m 10 m 20 m 20 m
5 kenampakan topografi 10 m 10 m 20 m 20 m
6
Akurasi kedalaman
a = 0,25 m
b = 0,0075
a = 0,5 m
b = 0,013
a = 1,0 m
b = 0,023
a = 1,0 m
b = 0,023
Catatan: a dan b adalah variabel untuk menentukan ketelitian kedalaman
Keterangan:
a : kesalahan independen
b : faktor kesalahan kedalaman yang dependen
Orde ketelitian survei dalam SNI 7646:2010 masih mengacu pada
International Hydrographic Organization (IHO) SP-44 edisi ke 4 dan IHO SP-32

15
edisi ke 5 tahun 1994. Tetapi IHO telah menerbitkan IHO Standards Of
Hydrographics Surveys terbaru yaitu IHO SP-44 edisi ke 5 tahun 2008. Terdapat
pembaharuan pada pembagian orde ketelitian survei yaitu menjadi orde khusus, 1a,
1b, dan 2. Perubahan mendasar yang terdapat pada IHO edisi ke 5 tahun 2008 adalah
pada orde 1a pencarian dasar laut secara penuh diperlukan dan pada orde 1b tidak
diperlukan. Sementara orde 3 dihilangkan karena dianggap sama dengan orde 2
(Pramanda, 2013).
I.7.3. Gerak Relatif
I.7.3.1. Pengertian gerak relatif
Sebuah benda dikatakan bergerak relatif terhadap benda lain jika dalam
selang waktu tertentu kedudukan relatif benda tersebut berubah. Dengan demikian
bergerak ataupun diam merupakan konsep relatif berdasarkan hubungan antara benda
satu dengan benda lain yang menjadi acuannya (pengamat). Gerak tersebut akan
teramati berbeda oleh pengamat dari sistem acuan lain. Contoh gerak relatif adalah
sebuah kpal yang sedang bergerak pada sebuah lintasan lurus dengan kecepatan 10
m/s ke arah barat, di dalam kapal ada seorang penumpang sedang duduk diam di atas
kursi merasa bahwa ia sedang tidak bergerak, tetapi menurut pengamat lain yang
diam terhadap tanah, penumpang kapal tersebut diamati sedang bergerak bersama
kapal dengan pergeseran (perubahan posisi) tiap waktu sesuai dengan perubahan
posisi kapal akibat kecepatannya tadi.
I.7.3.2. Pengertian kerangka Acuan Inersial dan transformasi Galileo
Kerangka acuan yang bergerak dengan kecepatan tetap disebut sebagai
kerangka acuan inersial. Peristiwa-peristiwa yang teramati oleh tiap kerangka acuan
inersial akan tampak berbeda. Tetapi hukum-hukum Newton dan fisika lainnya tetap
berlaku dalam semua kerangka acuan itu. Perbandingan pengamatan-pengamatan
yang dilakukan dalam berbagai kerangka acuan inersial diperlukan proses
transformasi antar kerangka acuan. Transformasi antar kerangka acuan pada
kecepatan yang jauh lebih kecil dari kecepatan cahaya dapat menggunakan
transformasi Galileo (Gautreau, dkk, 2006). Hubungan antara kerangka acuan diam
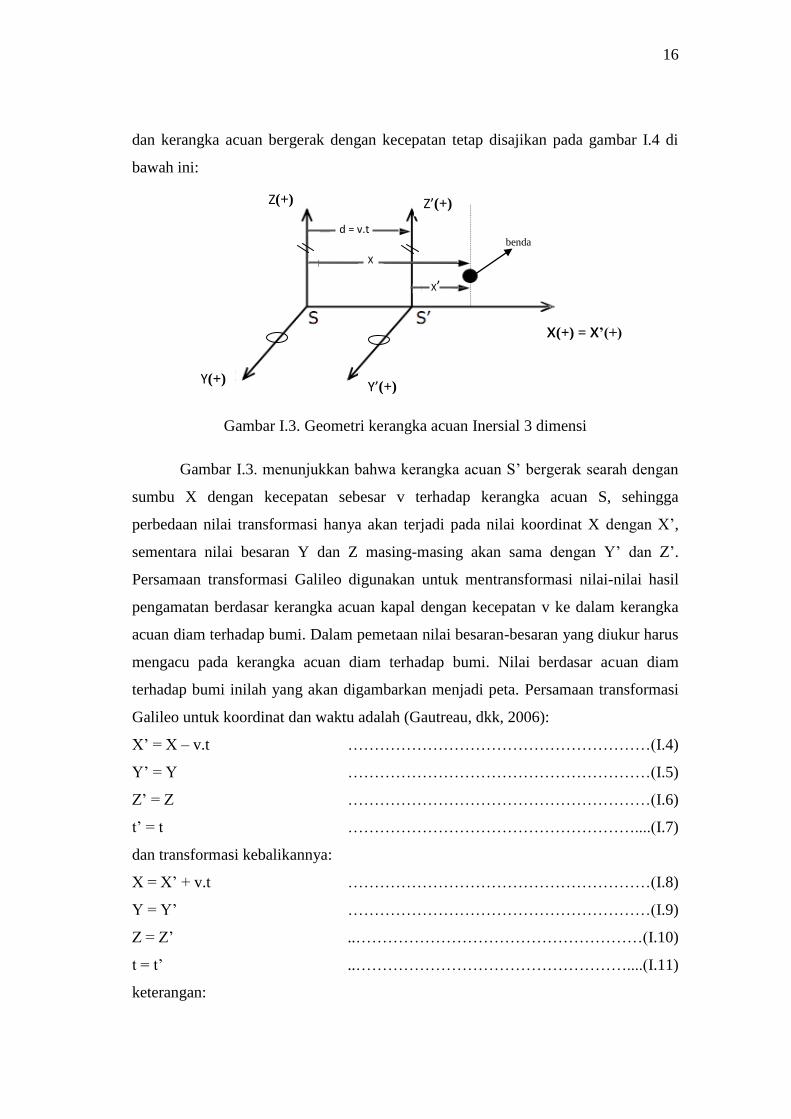
16
dan kerangka acuan bergerak dengan kecepatan tetap disajikan pada gambar I.4 di
bawah ini:
Gambar I.3. Geometri kerangka acuan Inersial 3 dimensi
Gambar I.3. menunjukkan bahwa kerangka acuan S’ bergerak searah dengan
sumbu X dengan kecepatan sebesar v terhadap kerangka acuan S, sehingga
perbedaan nilai transformasi hanya akan terjadi pada nilai koordinat X dengan X’,
sementara nilai besaran Y dan Z masing-masing akan sama dengan Y’ dan Z’.
Persamaan transformasi Galileo digunakan untuk mentransformasi nilai-nilai hasil
pengamatan berdasar kerangka acuan kapal dengan kecepatan v ke dalam kerangka
acuan diam terhadap bumi. Dalam pemetaan nilai besaran-besaran yang diukur harus
mengacu pada kerangka acuan diam terhadap bumi. Nilai berdasar acuan diam
terhadap bumi inilah yang akan digambarkan menjadi peta. Persamaan transformasi
Galileo untuk koordinat dan waktu adalah (Gautreau, dkk, 2006):
X’ = X – v.t …………………………………………………(I.4)
Y’ = Y …………………………………………………(I.5)
Z’ = Z …………………………………………………(I.6)
t’ = t ………………………………………………....(I.7)
dan transformasi kebalikannya:
X = X’ + v.t …………………………………………………(I.8)
Y = Y’ …………………………………………………(I.9)
Z = Z’ ..………………………………………………(I.10)
t = t’ ..……………………………………………....(I.11)
keterangan:
Y’(+) Y(+)
x(+) = x’(+)
Z’(+) Z(+)
X
d = v.t benda
X’

17
(X’, Y’, Z’, t’) : koordinat 4D benda menurut kerangka acuan S’
(X, Y, Z, t) : koordinat 4D benda menurut kerangka acuan S
v : kecepatan kerangka acuan S’ terhadap S
Rumus I.4 sampai I.7 merupakan rumus mentransformasikan besaran koordinat
(X, Y, Z) menurut kerangka acuan diam (S) ke nilai besaran koordinat (X’, Y, Z’)
menurut kerangka acuan bergerak (S’), jika diketahui kecepatan (V) dan waktu
perpindahan (t). Sedangkan rumus I.8 sampai I.11 adalah rumus transformasi
kebalikan untuk menghitung besaran koordinat menurut kerangka acuan S dari
besaran koordinat kerangka acuan S’ yang diketahui. Konsep inilah yang dimaksud
transformasi Galilieo, yaitu konsep transformasi terhadap beda kerangka acuan
berdasarkan faktor kecepatan.
I.7.3.3. Penerapan transformasi Galileo dalam pemeruman
Berdasarkan persamaan nomor I.8 sampai I.11 (atau rumus untuk
mentransfomasikan nilai besaran dari kerangka acuan bergerak ke kerangka acuan
diam) dan gambar I.5, jika konsepnya diterapkan pada proses sounding untuk
pemeruman dengan kapal yang bergerak, maka antara lokasi saat gelombang
dipancarkan dan diterima lagi akan berbeda, geometrinya akan mengikuti gambar 1.4
berikut ini:
A0
Gambar 1.4. Pergeseran akibat kecepatan kapal
Vk A1 A0
Permukaan air
Topografi dasar perairan
Vk.∆t
Perambatan
gelombang suara Keterangan:
: arah kecepatan kapal
: Transducer
: topografi dasar perairan

18
Merujuk gambar I.4, A0 adalah posisi saat gelombang dipancarkan sedangkan
A1 adalah posisi saat gelombang diteima lagi. Geometri gambar I.4 diperoleh
berdasarkan pengamatan oleh pengamat yang diam, sementara bagi pengamat di
kapal yang bergerak, antara A0 dan A1 merupakan lokasi yang sama di suatu tempat
pada sistem alat pada kapal saat melakukan pengukuran di waktu (t) tertentu.
Menurut pengamat yang bergerak gelombang suara akan teramati bergerak benar-
benar vertikal, sementara menurut pengamat diam, arah rambat gelombang suara
adalah resultan dari arah vertikal kecepatan gelombang dan arah kecepatan kapal.
Jika arah gerak kerangka acuan S’ merupakan pengamat di kapal menyimpang dari
kerangka acuan diam S sebesar sudut azimuth tertentu (α) maka rumus transformasi
Galileo disusun menjadi:
X = X’ + Vk . ∆t . sin α …………………………….………….…(I.12)
Y = Y’ + Vk . ∆t . cos α …..……………………………………....(I.13)
Z = Z’ …………………………….…………….(I.10)
keterangan:
(X’, Y’, Z’) : koordinat 3D benda menurut kerangka acuan kapal
(X, Y, Z) : koordinat 3D benda menurut kerangka acuan diam
∆t : selang waktu
A0 : posisi saat t0 (saat gelombang dipancarkan)
A1 : posisi saat t1 (saat gelombang diterima)
Vk : kecepatan kapal
α : azimuth (arah kecepatan kapal)
∆t : selang waktu perpindahan posisi kapal
Persamaan 1.10 menunjukkan bahwa Z dan Z’ mempunyai nilai yang sama
karena perubahan posisi hanya terjadi secara horizontal, meskipun demikian
sebenarnya hasil pengukuran kedalaman akan terpengaruh oleh gerak tersebut, yaitu
tidak vertikalnya lintasan gelombang suara akibat adanya pergeseran yang
disebabkan kecepatan kapal. Sehingga berdasarkan gambar 1.4. proses penurunan
rumus koreksi untuk ukuran kedalaman akan memenuhi bentuk segitiga sama kaki
berikut:

19
Gambar I.5. Geometri kesalahan pengukuran kedalaman
Dengan demikian persamaan kedalaman terkoreksi (∆h) adalah:
∆h = …………………………………………….…(I.14)
Sesuai gambar I.5, bahwa waktu yang diperlukan bagi kapal untuk menempuh jarak
A0A1 sama dengan waktu yang diperlukan bagi sinyal suara untuk menempuh jarak
A0Ah lalu jarak AhA0 atau dengan kata lain merupakan selang waktu pengukuran
pergi-pulang oleh gelombang suara melalui jarak 2.∆h’. Sehingga dapat dirumuskan:
= ……....………………………………………………….…….….…..(I.15)
Dengan demikian:
A0A1 = 2Vk ……….…………………………………………………….……(I.16)
Pada bagian selanjutnya nilai A0A1 dianggap merupakan bentuk kesalahan
horizontal posisi pemeruman akibat pengaruh kecepatan kapal, sehingga kesalahan
horizontal akan disimbolkan sebagai fs. Dengan demikian:
fs = Vk …………..……………………..……….……………………………..(I.17)
Nilai kecepatan kapal rata-rata antar titik sebagai pendekatan dapat diperoleh dari
hitungan jarak antar titik perum (titik p’ dan titik q’) ukuran GPS dibagi interval
waktu tempuh antar titik (∆tpq). Berikut rumusnya:
A1 A0
A0A1
∆h’
∆h
terrain Ah
Arah rambat
gelombang
suara

20
Vk = = ..…………………………………….………….(I.18)
∆tp’q’ = tq’ – tp’ …………………………….………………………….………..(I.19)
Arah kecepatan kapal atau azimuth pada saat pengukuran kedalaman (αp’p) dapat
memakai pendekatan azimuth dari p ke p, sebagaimana gambar berikut:
Gambar I.6. Penentuan arah kecepatan kapal
Titik p’ dan q’ adalah lokasi tiik ke-n dan ke-(n+1) yaitu titik-titik saat gelombang
dipancarkan dan pengukuran posisi dilakukan secara periodik, sementara titik p
adalah posisi hasil proyeksi dari titik di dasar perairan (titik Ah; lihat gambar I.7)
yang memantulkan gelombang suara. Sehingga mengacu gambar I.8 nilai azimuth
p’p sama dengan p’q’ adalah:
αp’p = αp’q’ ……………………………………………………...……………….. (I.20)
sehingga:
αp’p = arc tan( ) ……….……………………………….….………..….…(I.21)
Dengan demikian rumus koreksi X, Y dan ∆h merupakan pengembangan dari konsep
transformasi antar kerangka acuan.
Transformasi nilai koordinat X:
Xp = Xp’ + Vk sin(αp’q’) …….……………………………….…….…………(I.22)
Xp = Xp’ + sin(αp’q’) ……………………...............…………….….…….(I.23)
Xp = Xp’ + sin(arc tan( )) ………………….……(I.24)
Transformasi nilai koordinat Y:
αp’p p’ p q’
Utara

21
Yp = Yp’ + Vk cos(αp’q’) ………………………………….………………....(I.25)
Yp = Yp’ + cos(αp’q’) ………………………………………………….....(I.26)
Yp = Yp’ + cos(arc tan( ))……………………….(I.27)
Transformasi nilai kedalaman (∆h):
∆h = …………………………………………….……….….....….(I.28)
fs = Dp’p = = …………………….….…...…(I.29)
Keberadaan tersendiri dari nilai fs diperlukan untuk mempermudah menghitung
kedalaman terkoreksi. Karena jika rumus fs disubstitusikan secara langsung akan
mempersulit hitungan perambatan kesalahannya.
Keterangan:
(Xp,Yp) : koordinat titik perum terkoreksi berdasar kerangka acuan diam
(Xp’, Yp’) : koordinat titik perum terukur berdasar kerangka acuan kapal
∆h’ : kedalaman terukur
∆h : kedalaman terkoreksi
Dp’q’ : jarak antara titik perum terukur ke-i dengan titik perum ke-(i+1)
αp’q’ : azimuth p’q’
vs : konstanta cepat rambat gelombang suara
Vk : kecepatan kapal
tp’ : waktu saat di titik P’ (waktu GPS)
tq’ : waktu saat di titik Q’ (waktu GPS)
fs : kesalahan horizontal akibat kecepatan kapal
I.7.4. Penentuan Standar Deviasi (σ)
Nilai ketelitian atau standar deviasi (σ) ukuran dari pengukuran GPS dapat
langsung diketahui dari metode pengukuran yang dilakukan (lihat tabel I.1),
sedangkan standar deviasi ukuran kedalaman dengan menggunakan alat sounding

22
dapat diperoleh dari suatu pemodelan varian (σ2). Pemodelan varian ukuran
kedalaman (∆h’) mengikuti konsep pemodelan varian pengukuran jarak. Pemodelan
varian menurut Mikhail untuk pengukuran jarak dihitung menurut persamaan berikut
ini (Mikhail, dkk, 1981):
= a2 + b
2 Di
2 ……………………………...…………….(I.30)
Dalam hal ini,
: varian total jarak pengukuran ke-i
: jarak ukuran ke-i
b : ketelitian relatif alat (konstanta pengali)
a : ketelitian jarak yang tidak tergantung jarak sebenarnya di lapangan
(konstanta penambah)
I.7.5. Perambatan Kesalahan Acak
Kesalahan acak merupakan suatu kesalahan yang pasti selalu terjadi dalam
pengukuran apapun. Menurut Basuki (2006), kesalahan acak/random terjadi karena
hal-hal yang tidak terduga sebelumnya, kesalahan ini dapat disebabkan oleh faktor-
faktor yang terjadi di alam maupun dari si pengamat sendiri. Kesalahan ini akan
terlihat jika suatu pengukuran dilakukan secara berulang-ulang dan hasil tiap ukuran
pasti tidak selalu sama satu sama lain. Semakin banyak hasil ukuran berulang
tersebut makan akan konsisten terhadap kurva distribusi normal Gauss, atau dengan
kata lain, kurva distribusi normal merupakan representasi sebaran statistik dari nilai-
nilai ukuran berulang sebanyak mendekati tak terhingga. Representasi kesalahan
acak dalam teori pengukuran adalah standar deviasi.
Jika suatu besaran A dan B tidak diketahui nilai standar deviasinya dan
besaran ini merupakan fungsi dari besaran-besaran lain (x, y, z) yang diketahui
standar deviasinya, maka standar deviasi besaran A dan B dapat dihitung dengan
rumus perambatan kesalahan. Rumus untuk menghitung perambatan kesalahan acak
A dan B adalah sebagai berikut:
Jika diketahui,
A = F(x, y, z) = ax + by + cz ………………...………………………….(I.31)
B = F(x, y, z) = dx + ey + fz ………………………...………………….(I.32)

23
Dan matriks varian-kovarian parameter x, y dan z adalah:
∑xy =
Sehingga untuk menghitung nilai varian A (σA2) dan B (σB
2) serta kovariannya (σAB)
berdasarkan deret Taylor dengan linierisasi sampai turunan pertama maka
perambatan kesalahan untuk menghitung varian besaran A dan B mengikuti
persamaan di bawah ini (Widjajanti, 2012):
σA2 = ( )2
(σx)2 + ( )2
(σy)2 + ( )2
(σz)2 + 2.( )( )σxy + 2.( )( )σxz
+ 2.( )( )σyz ……………………………...…………….(I.33)
σB2 = ( )2
(σx)2 + ( )2
(σy)2 + ( )2
(σz)2 + 2.( )( )σxy + 2.( )( )σxz
+ 2.( )( )σyz ……………………...…………………….(I.34)
Keterangan:
∑xy : Matriks Varian-Kovarian besaran ukuran x, y dan z
σA2 : Varian Besaran A
σB2 : Varian Besaran B
σx2 : Varian Besaran x
σy2 : Varian Besaran y
σz2 : Varian Besaran z
σxy : Kovarian xy
σxz : Kovarian xz
σyz : Kovarian yz
Tetapi jika semua pengukuran tidak berkorelasi atau nilai kovarian = 0, maka
persamaan tersebut menjadi:

24
σA2 = ( )2
(σx)2 + ( )2
(σy)2 + ( )2
(σz)2
= a2(σx)
2 + b
2(σy)
2 + c
2(σz)
2 ……………………...…………………….(I.35)
σB2 = ( )2
(σx)2 + ( )2
(σy)2 + ( )2
(σz)2
= d2(σx)
2 + e
2(σy)
2 + f
2(σz)
2 ………………………...………………….(I.36)
Penerapan perambatan kesalahan dapat diaplikasikan pada persamaan koreksi
kecepatan yang telah diketahui fungsi terhadap masing-masing parameternya, artinya
besaran terkoreksi merupakan fungsi dari besaran ukuran, yaitu:
1. Berdasar rumus I.22 diketahui bahwa: Xp = f (Xp’, Dpq, ∆h’, αpq)
2. Berdasar rumus I.25 diketahui bahwa: Yp = f (Yp’, Dpq, ∆h’, αpq)
3. Berdasar rumus I.28 diketahui bahwa: ∆h = f (∆h’, fs)
4. Fungsi jarak: Dp’q’ = f (Xp’, Xq’, Yp’, Yq’)
5. Berdasar rumus I.21 diketahui bahwa: αp’q’ = f (Xp’, Xq’, Yp’, Yq’)
6. Berdasar rumus I.29 diketahui bahwa: fs = f (Xp, Xp’, Yp, Yp’)
sehingga:
σDp’q’
2 = ( )2
(σXp’)2 + ( )2
(σXq’)2 + ( )2
(σYp’)2 + ( )2
(σYq’)2
= ( )2(σXp’)
2 + ( )2
(σXq’)2 + ( )2
(σYp’)2 +
( )2(σYq’)
2 ………………...………………………….(I.37)
σαpq
2 = ( )2
(σXp’)2 + ( )2
(σXq’)2 + ( )2
(σYp’)2 + ( )2
(σYq’)2
= ( )2(σXp’)
2 + ( )2
(σXq’)2 + ( )2
(σYp’)2 +
( )2(σYq’)
2 …………………...……………………….(I.38)
Kemudian dapat dihitung varian koordinat terkoreksi (Xp, Yp)
25
σXp
2 = ( )2
(σXp’)2 + ( )2
(σDpq)2 + ( )2
(σ∆h’)2 + ( )2
(σαpq)2
= 12. (σXp’)
2 + ( sin(αp’q’))
2(σDpq)
2 + ( sin(αp’q’))
2(σ∆h’)
2 + (
cos(αp’q’))2(σαpq)
2 ………………………...………………….(I.39)
σYp
2 = ( )2
(σYp’)2 + ( )2
(σDpq)2 + ( )2
(σ∆h’)2 + ( )2
(σαpq)2
= 12. (σYp’)
2 + ( cos(αp’q’))
2(σDpq)
2 + ( cos(αp’q’))
2(σ∆h’)
2 +
( (-sin(αp’q’)))2(σαpq)
2 …………………………...……………….(I.40)
Dan menghitung nilai varian kesalahan horizontal untuk memudahkan menghitung
nilai varian kedalaman terkoreksi (∆h):
σfs
2 = ( )2
(σXp)2 + ( )2
(σXp’)2 + ( )2
(σYp)2 + ( )2
(σYp’)2
= ( )2(σXp)
2 + ( )2
(σXp’)2 + ( )2
(σYp)2 +
( )2(σYp’)
2 ………………………..………………….(I.41)
σ∆h2 = ( )2
(σ∆h’)2 + ( )2
(σfs)2
= ( )2(σ∆h’)
2 + ( )2
(σfs)2 ………………………………...………….(I.42)
Keterangan:
σDp’q’
2 : Varian Jarak p’q”
σαpq
2 : Varian Azimuth p’q”
σXp
2 : Varian Xp (terkoreksi)
σYp
2 : Varian Xp (terkoreksi)

26
σfs
2 : Varian Kesalahan Horizontal
σ∆h2 : Varian Kedalaman (terkoreksi)
I.7.6. Uji Kualitas Data Perum
Dasar penentukan batas toleransi kesalahan beda kedalaman untuk uji
kualitas ini adalah IHO SP-44 tahun 2008 dan SNI 7646:2010 dengan tingkat
kepercayaan 95% (± 1,96σ). Sementara rumus yang digunakan untuk menghitung
batas toleransi tersebut dapat dilihat pada rumus I.43 berikut:
± ………...……………...………………………(I.43)
Keterangan:
a : kesalahan independen
b : faktor kesalahan kedalaman yang dependen
d : kedalaman rata-rata (minimal 30 titik perpotongan)
Nilai a dan b dalam persamaan I.43 tersebut disesuaikan dengan orde survei yang
dilakukan seperti yang tercantum pada tabel I.2.
I.7.7. Uji Statistik Signifikansi Parameter 2 Kelompok Data
Pengujian statistik ini dilakukan untuk menganalisis dua kelompok data yang
dianggap merupakan representasi suatu objek yang sama, tujuan pengujian adalah
untuk menguji apakah antara besaran-besaran pada kelompok data 1 dengan
kelompok data 2 sama atau tidak secara ststistik. Pada penelitian ini kelompok data 1
mewakili data koordinat X’, Y’ dan ∆h’ yang merupakan data hasil ukuran,
sedangkan kelompok data 2 mewakili data koordinat X, Y dan ∆h yang telah
dikoreksi kesalahan kecepatan kapal berdasarkan konsep Transformasi Galileo.
Untuk melakukan pengujian ini harus mengetahui nilai data kelompok 1 dan data
kelompok 2 beserta masing-masing ketelitiannya (standar deviasi) pada setiap
parameter besaran yang akan diuji. Hipotesis yang disusun adalah:
H0 : parameter kelompok I sama dengan parameter kelompok II
Ha : parameter kelompok I tidak sama dengan parameter kelompok II
27
Hipotesis nol (H0) akan diterima jika memenuhi kriteria hitungan berikut (Widjajanti,
2013):
≤ Tα,F ……...…………………………………….(I.44)
dengan nilai F adalah:
F = F1 + F2 ……...…………………………………….(I.45)
Keterangan:
Tα,F : sebaran fungsi T dari tabel T (Student)
Si : nilai ke-i kelompok data 1
Si’ : nilai ke-i kelompok data 2
σSi : standar deviasi Si
σSi’ : standar deviasi Si’
F1 : derajat kebebasan (Degree Of Freedom) kelompok data 1
F2 : derajat kebebasan (Degree Of Freedom) kelompok data 2
α : taraf uji atau tingkat kepercayaan
I.8. Hipotesis
Secara teori, suatu benda yang bergerak pasti memiliki kerangka acuan yang
berbeda dengan kerangka acuan bumi (diam), dengan demikian besaran-besaran
ukurannya juga memiliki perbedaan nilai dengan nilai menurut kerangka acuan bumi
(diam) atau terdapat kesalahan. Sehingga nilai ukuran harus dikoreksi agar nilainya
sesuai dengan kerangka acuan bumi, karena dalam pemetaan memakai nilai besaran
berdasar acuan bumi, persamaan koreksi ini dapat disusun dan dikembangkan sesuai
dengan parameter-parameter pengukuran yang harus diketahui (nilai kecepatan dan
azimuth), argumen inilah yang menjadi dasar penyusunan hipotesis penelitian ini.
Hipotesis penelitian ini menyatakan bahwa “kecepatan kapal memberikan
pengaruh beda nilai (kesalahan) pada hasil pengukuran kedalaman dan
penentuan posisi yang menggunakan alat Singlebeam Echosounder”.