a) system pada tekanan botol angin - selamat …bp3ipjakarta.ac.id/attachments/article/624/sistem...
TRANSCRIPT
1 | P a g e
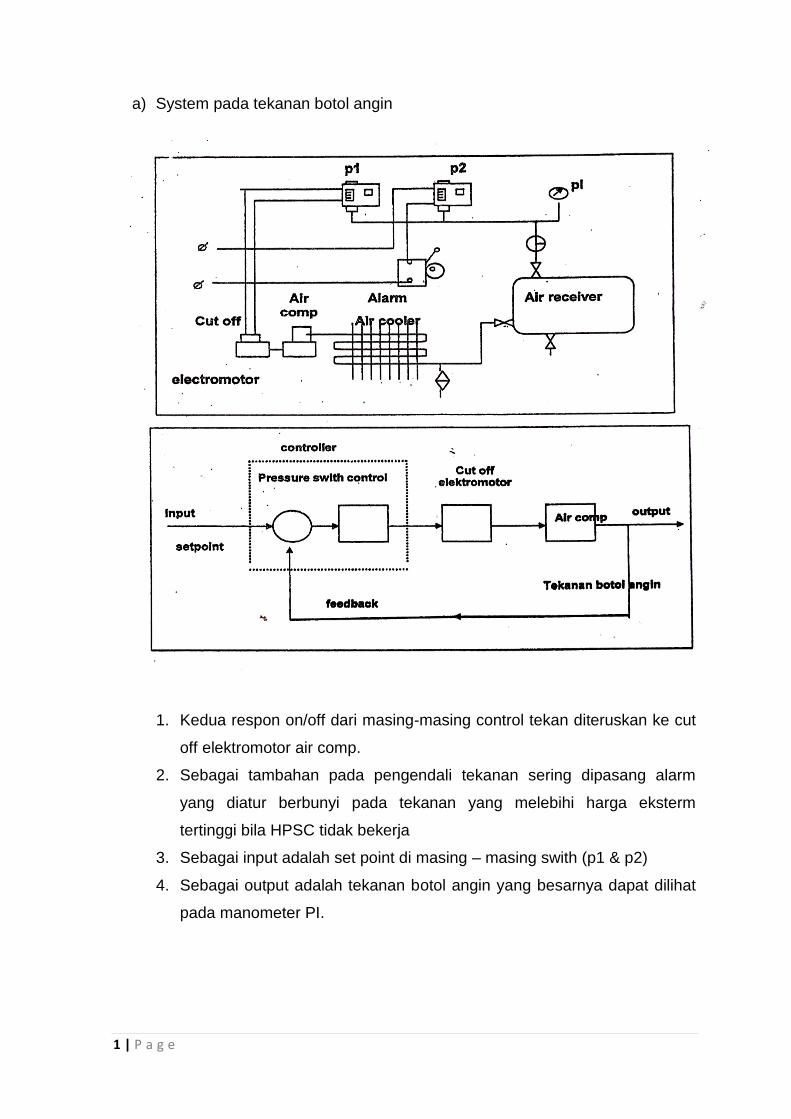
a) System pada tekanan botol angin
1. Kedua respon on/off dari masing-masing control tekan diteruskan ke cut
off elektromotor air comp.
2. Sebagai tambahan pada pengendali tekanan sering dipasang alarm
yang diatur berbunyi pada tekanan yang melebihi harga eksterm
tertinggi bila HPSC tidak bekerja
3. Sebagai input adalah set point di masing – masing swith (p1 & p2)
4. Sebagai output adalah tekanan botol angin yang besarnya dapat dilihat
pada manometer PI.
2 | P a g e
Menjelaskan prinsip kerja alat kontrol Proporsional dan On/Off, nama dan fungsi
masing-masing bagian.
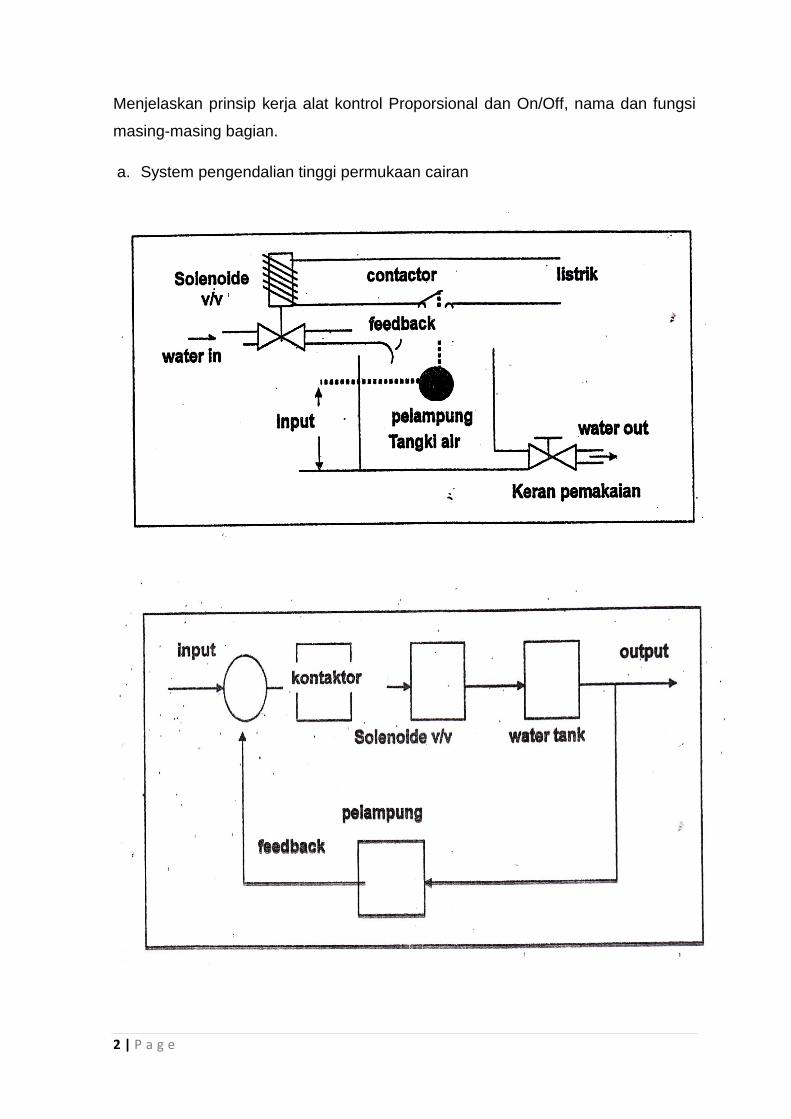
a. System pengendalian tinggi permukaan cairan
3 | P a g e
1. Dalam instalasi permukaan air tangki karena adanya pemakaian terjadilah
perubahan permukaan air.
2. Sebagai input adalah ketinggianair yang dikehendaki
3. Dengan adanya perubahan tertinggi permukaan air pada tangki maka
kontakter listrik akan lepas dan memutus hubungan listrik pada solenoide v/v
akibatnya akan menutup aliran air ke tangki
4. Bila kemudian adanya pemakaian, permukaan air tangki berkurang maka
pelampung akan turun dan kontactor akan menutup yang mengakibatkan arus
listrik menuju solenoid v/v
5. Solenoid v/v akan membuka lebar-lebar dan air akan mengalir ke tangki
sampai ketinggian yang dikehendaki dan seterusnya
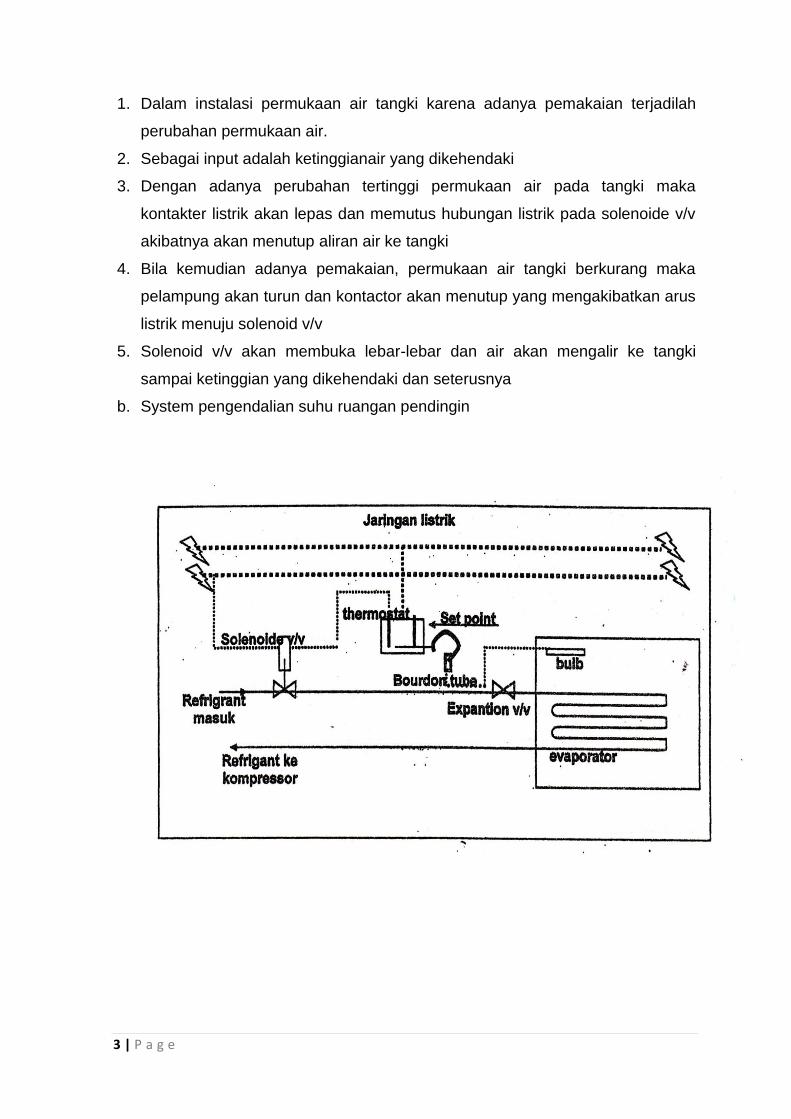
b. System pengendalian suhu ruangan pendingin
4 | P a g e
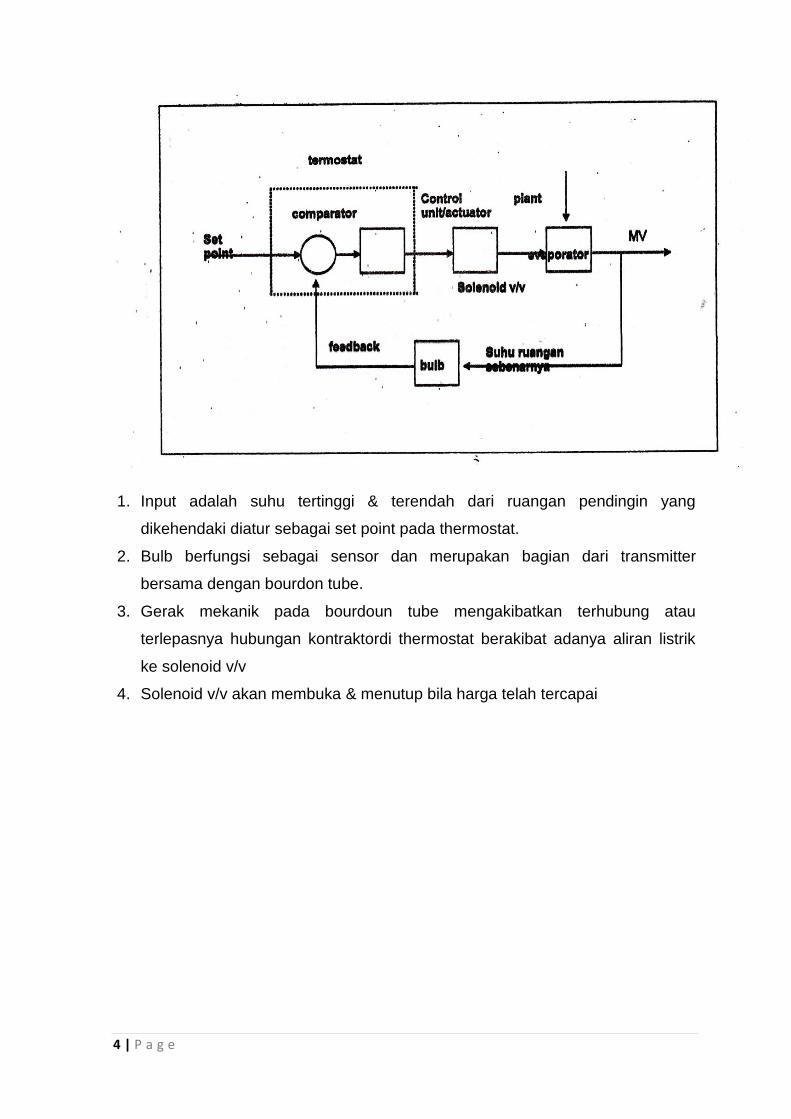
1. Input adalah suhu tertinggi & terendah dari ruangan pendingin yang
dikehendaki diatur sebagai set point pada thermostat.
2. Bulb berfungsi sebagai sensor dan merupakan bagian dari transmitter
bersama dengan bourdon tube.
3. Gerak mekanik pada bourdoun tube mengakibatkan terhubung atau
terlepasnya hubungan kontraktordi thermostat berakibat adanya aliran listrik
ke solenoid v/v
4. Solenoid v/v akan membuka & menutup bila harga telah tercapai
5 | P a g e
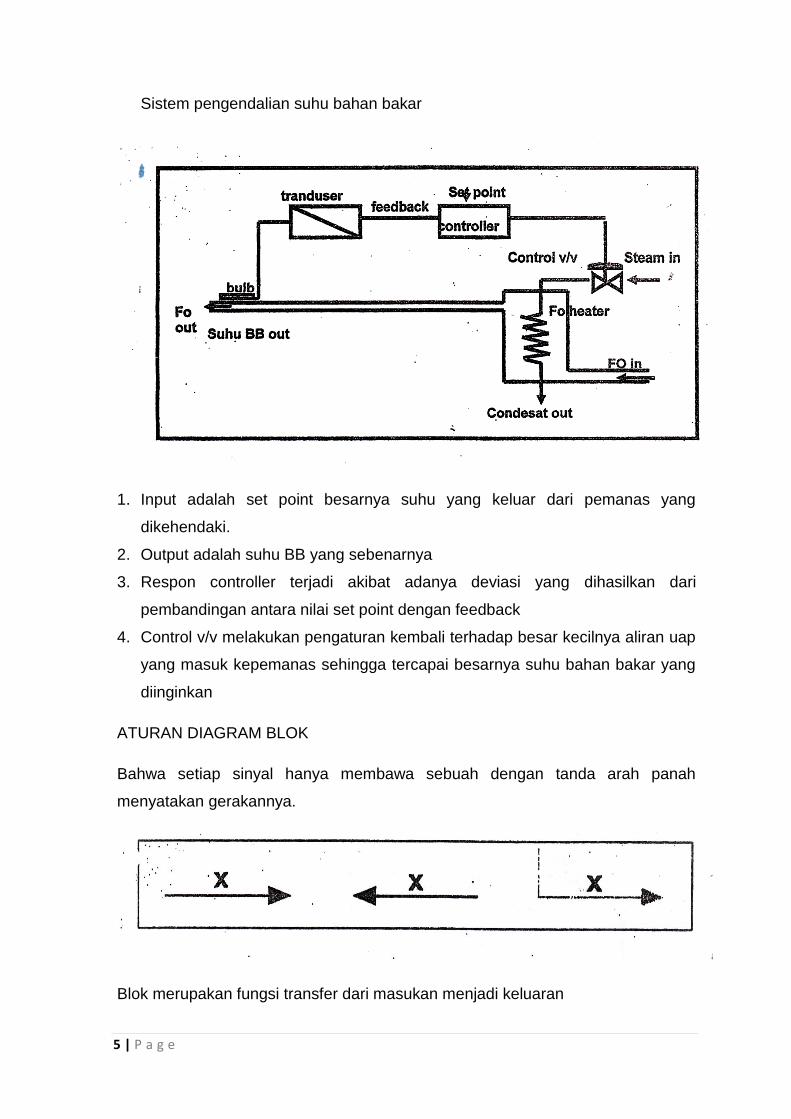
Sistem pengendalian suhu bahan bakar
1. Input adalah set point besarnya suhu yang keluar dari pemanas yang
dikehendaki.
2. Output adalah suhu BB yang sebenarnya
3. Respon controller terjadi akibat adanya deviasi yang dihasilkan dari
pembandingan antara nilai set point dengan feedback
4. Control v/v melakukan pengaturan kembali terhadap besar kecilnya aliran uap
yang masuk kepemanas sehingga tercapai besarnya suhu bahan bakar yang
diinginkan
ATURAN DIAGRAM BLOK
Bahwa setiap sinyal hanya membawa sebuah dengan tanda arah panah
menyatakan gerakannya.
Blok merupakan fungsi transfer dari masukan menjadi keluaran
6 | P a g e
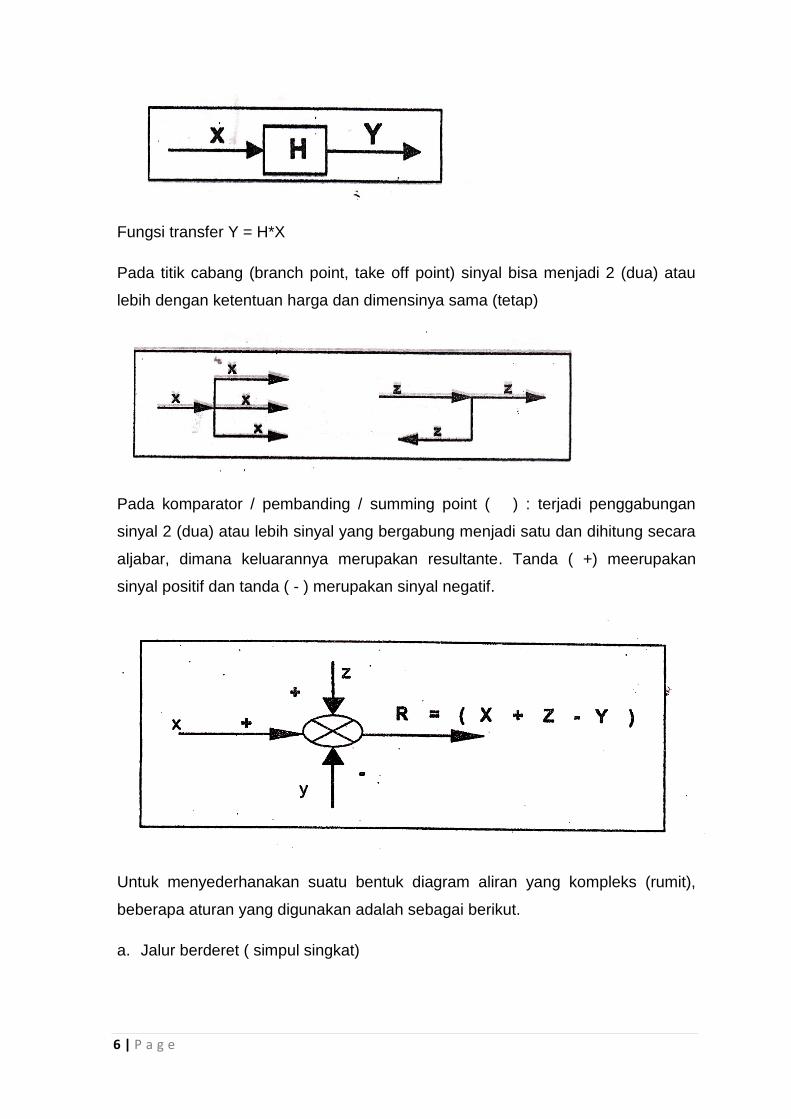
Fungsi transfer Y = H*X
Pada titik cabang (branch point, take off point) sinyal bisa menjadi 2 (dua) atau
lebih dengan ketentuan harga dan dimensinya sama (tetap)
Pada komparator / pembanding / summing point ( ) : terjadi penggabungan
sinyal 2 (dua) atau lebih sinyal yang bergabung menjadi satu dan dihitung secara
aljabar, dimana keluarannya merupakan resultante. Tanda ( +) meerupakan
sinyal positif dan tanda ( - ) merupakan sinyal negatif.
Untuk menyederhanakan suatu bentuk diagram aliran yang kompleks (rumit),
beberapa aturan yang digunakan adalah sebagai berikut.
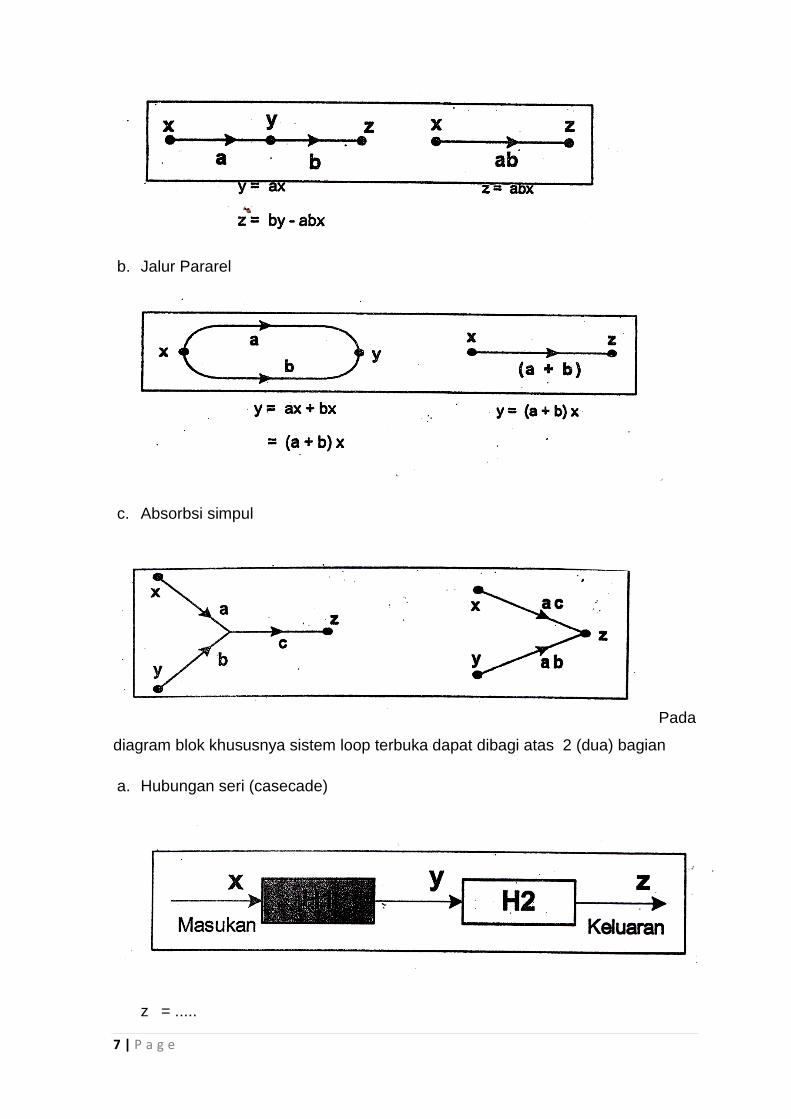
a. Jalur berderet ( simpul singkat)
7 | P a g e
b. Jalur Pararel
c. Absorbsi simpul
Pada
diagram blok khususnya sistem loop terbuka dapat dibagi atas 2 (dua) bagian
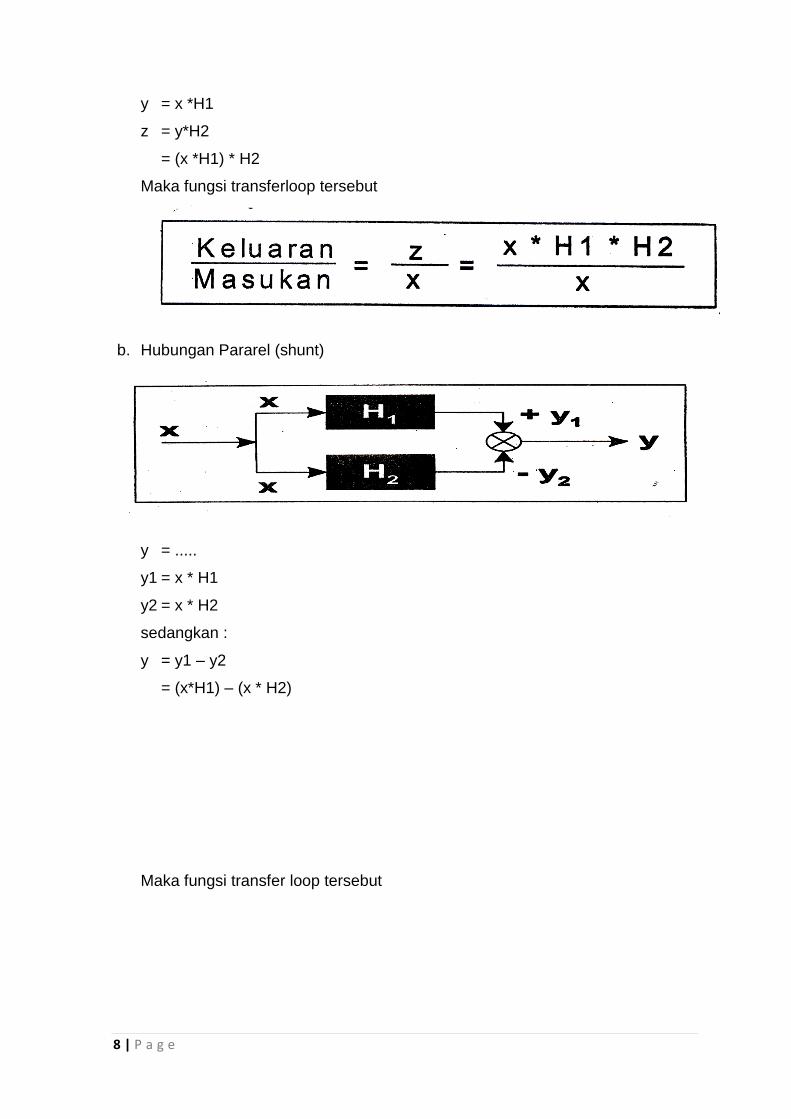
a. Hubungan seri (casecade)
z = .....
8 | P a g e
y = x *H1
z = y*H2
= (x *H1) * H2
Maka fungsi transferloop tersebut
b. Hubungan Pararel (shunt)
y = .....
y1 = x * H1
y2 = x * H2
sedangkan :
y = y1 – y2
= (x*H1) – (x * H2)
Maka fungsi transfer loop tersebut
9 | P a g e
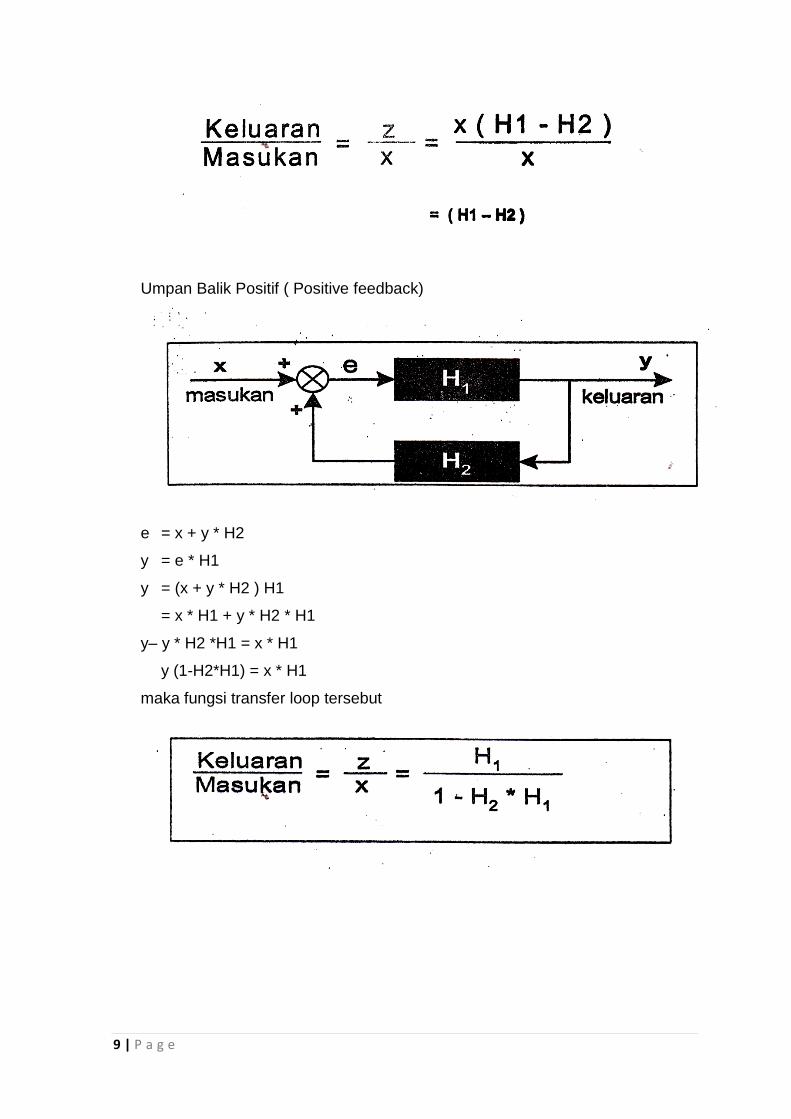
Umpan Balik Positif ( Positive feedback)
e = x + y * H2
y = e * H1
y = (x + y * H2 ) H1
= x * H1 + y * H2 * H1
y– y * H2 *H1 = x * H1
y (1-H2*H1) = x * H1
maka fungsi transfer loop tersebut
10 | P a g e
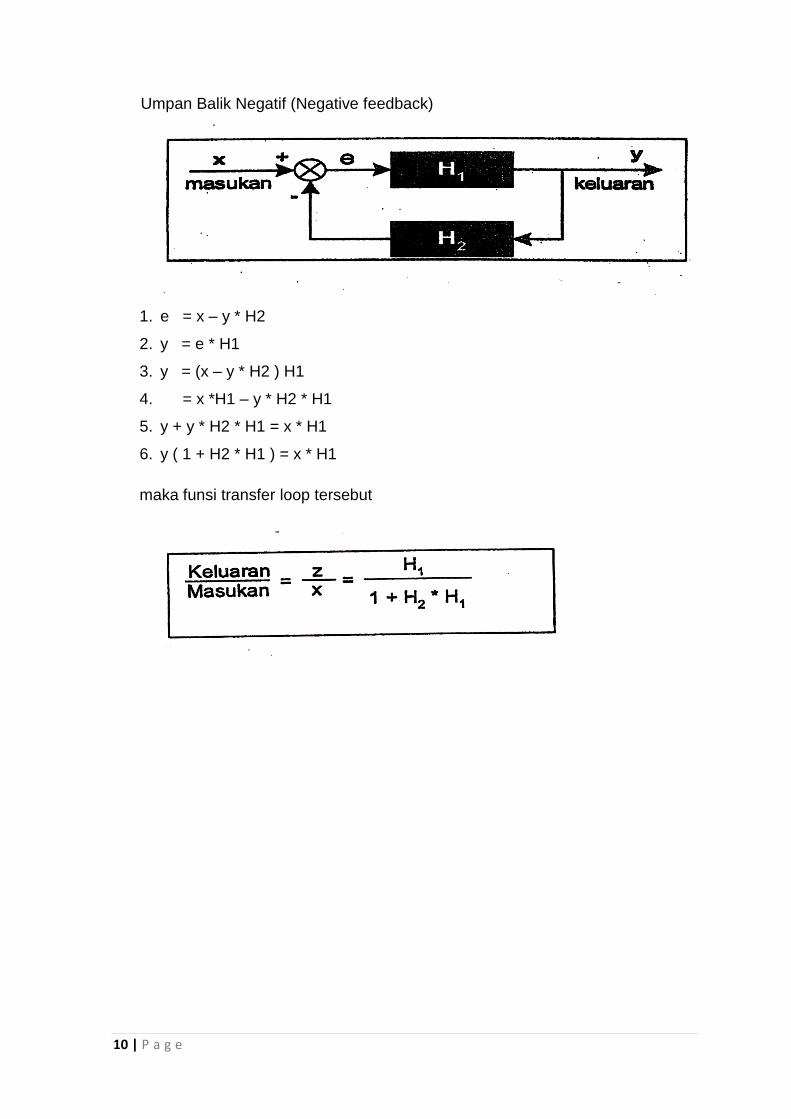
Umpan Balik Negatif (Negative feedback)
1. e = x – y * H2
2. y = e * H1
3. y = (x – y * H2 ) H1
4. = x *H1 – y * H2 * H1
5. y + y * H2 * H1 = x * H1
6. y ( 1 + H2 * H1 ) = x * H1
maka funsi transfer loop tersebut