modulpraktek.files.wordpress.com€¦ · web viewuntuk melakukan pemadaman api robot playmaker...
TRANSCRIPT
BAGIAN SATU : INFORMASI TENTANG TIM PESERTA1. Tim
Nama Tim
PLAYMAKERNama ketua Tim
Fransiskus Muliadi
No Hp 082227370095
Nama Instruktur
Dian Artanto
No HP 081328448740
2. Intitusi
Nama lengkap institusi
Politeknik Mekatronika Sanata Dharma
Nama Departemen/fakultas
Prodi Mekatronika
Alamat Kontak:Kampus Politeknik Mekatronika Sanata Dharma, Paingan, Maguwoharjo, Depok Sleman Yogyakarta
Nomor Telepon : (0274)883037 ext.2266 Nomor FAX : (0274)8822098 Nomor HP : 081328448740 Alamat email : [email protected]
3. Alamat Lengkap, E-mail dan No. HP Contact Person
Kampus Politeknik Mekatronika Sanata Dharma, Paingan, Maguwoharjo, Depok Sleman Yogyakarta. [email protected], 082227370095
4. Divisi
Beroda √Berkaki
1
BAGIAN DUA: INFORMASI TENTANG (MESIN) ROBOT
1. Nama Tim Robot : PLAYMAKER
2. Robot3.1 Deskripsi umum robot
Robot playmaker didesain seperti mobil yang berjalan dengan
menggunakan dua buah roda dibelakang dan satu buah roda roll di depan,
desain ini bertujuan agar robot dapat bermanuver dengan lincah
Dalam melaksanakan perintah/tugas, robot ini dilengkapi dengan
beberapa sensor guna menunjang kinerja dari robot ini, adapaun sensor-sensor
itu adalah ultrasonic, sensor thermal, sensor photodiode, digital compass, dan
sound detector. Sensor-sensor tersebut lebih lanjut akan dijelaskan pada
bagian sensor.
Untuk melakukan pemadaman api robot playmaker menggunakan kipas
yang digerakkan oleh sebuah motor DC. Dan sebagai penentu arah kipas
digunakan dua buah motor servo dimana servo pertama digunakan untuk
mengarahkan kipas atas dan bawah, sedangkan servo kedua mengarahkan
kipas ke kiri dan ke kanan.
Robot playmaker menggunakan baterai (aki kering) dengan tegangan
12v sebagai sumber tegangannya.
2.2 Sistem Pergerakkan RobotRobot playmaker memilikii sistem penggerak berupa dua buah motor
DC diletakkan di bagian kanan dan kiri robot digunakan untuk menggerakkan
roda. Dengan sistem penggerak ini robot playmaker dapat bergerak maju,
mundur, belok ke ke kiri, belok ke kanan, dan berputar.
2.3 Bahan robotRoda robot : Teflon / plastik ABS
Kerangka : Plat Alumunium , acrylic
2
2.4 Sensor-sensorDalam menjalankan perintah mencari serta mematikan lilin, robot playmaker
dilengkapi dengan beberapa sensor sebagai berikut :
2.4.1 UltrasonicSensor ultrasonic digunakan sebagai pengukur jarak antara robot dengan
dinding dan halangan. Sensor ini terdiri dari dua bagian yaitu transmitter dan
receiver. Pada robot playmaker, dipasang 6 buah pasang sensor ultrasonic.
Satu buah dibagian depan, 2 buah di samping kiri robot, 2 buah di samping
kanan robot ,dan satu buah di bagian belakang Sensor ultrasonic yang dipakai
adalah Ping Ultrasonic Range Finder. Seperti pada gambar di bawah ini.
Gambar 1. Sensor Ultrasonik
Interfacing dari Ping Ultrasonic Range Finder dengan mikrokontroller
lebih jelasnya dapat dilihat pada gambar di bawah ini:
Gambar 2. Interfacing ultasonic dengan mikrokontrol
2.4.2 Sensor Flame
3
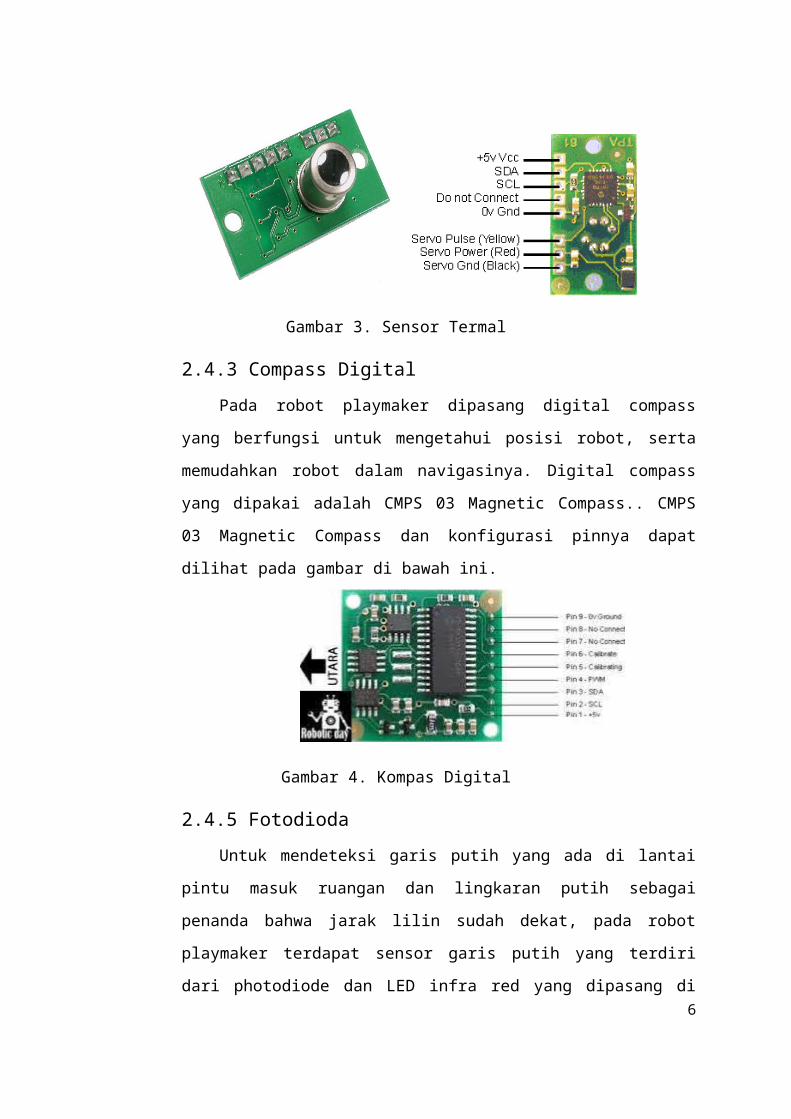
Sensor Panas Api atau Flame detector yang digunakan adalah TPA81 8x1
Thermal Array Sensor. Robot playmaker menggunakan flame detector sebagai
pendeteksi api lilin. Flame detector digunakan sebagai pendeteksi ada tidaknya
lilin dalam ruangan dan sebagai pendeteksi posisi lilin. Lebih jelasnya TPA81
8x1 Thermal Array Sensor dapat dilihat pada gambar di bawah ini:
Gambar 3. Sensor Termal
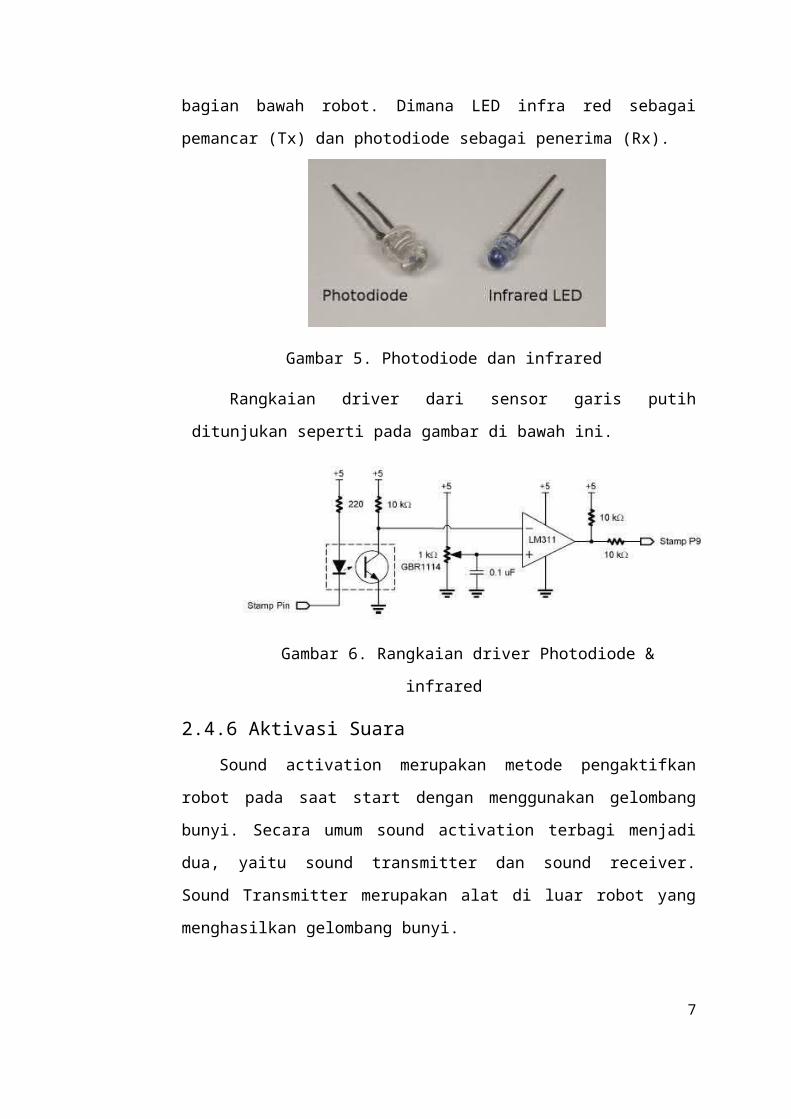
2.4.3 Compass DigitalPada robot playmaker dipasang digital compass yang berfungsi untuk
mengetahui posisi robot, serta memudahkan robot dalam navigasinya. Digital
compass yang dipakai adalah CMPS 03 Magnetic Compass.. CMPS 03
Magnetic Compass dan konfigurasi pinnya dapat dilihat pada gambar di bawah
ini.
Gambar 4. Kompas Digital
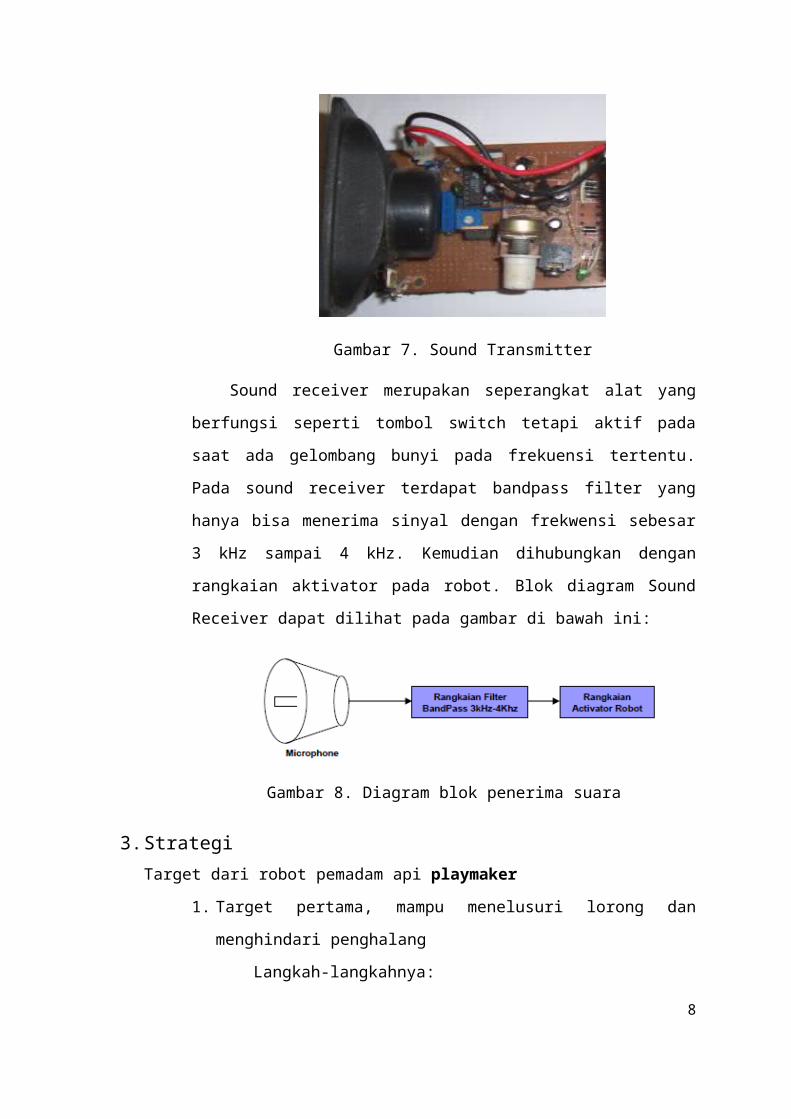
2.4.5 FotodiodaUntuk mendeteksi garis putih yang ada di lantai pintu masuk ruangan dan
lingkaran putih sebagai penanda bahwa jarak lilin sudah dekat, pada robot
playmaker terdapat sensor garis putih yang terdiri dari photodiode dan LED
4

infra red yang dipasang di bagian bawah robot. Dimana LED infra red sebagai
pemancar (Tx) dan photodiode sebagai penerima (Rx).
Gambar 5. Photodiode dan infrared
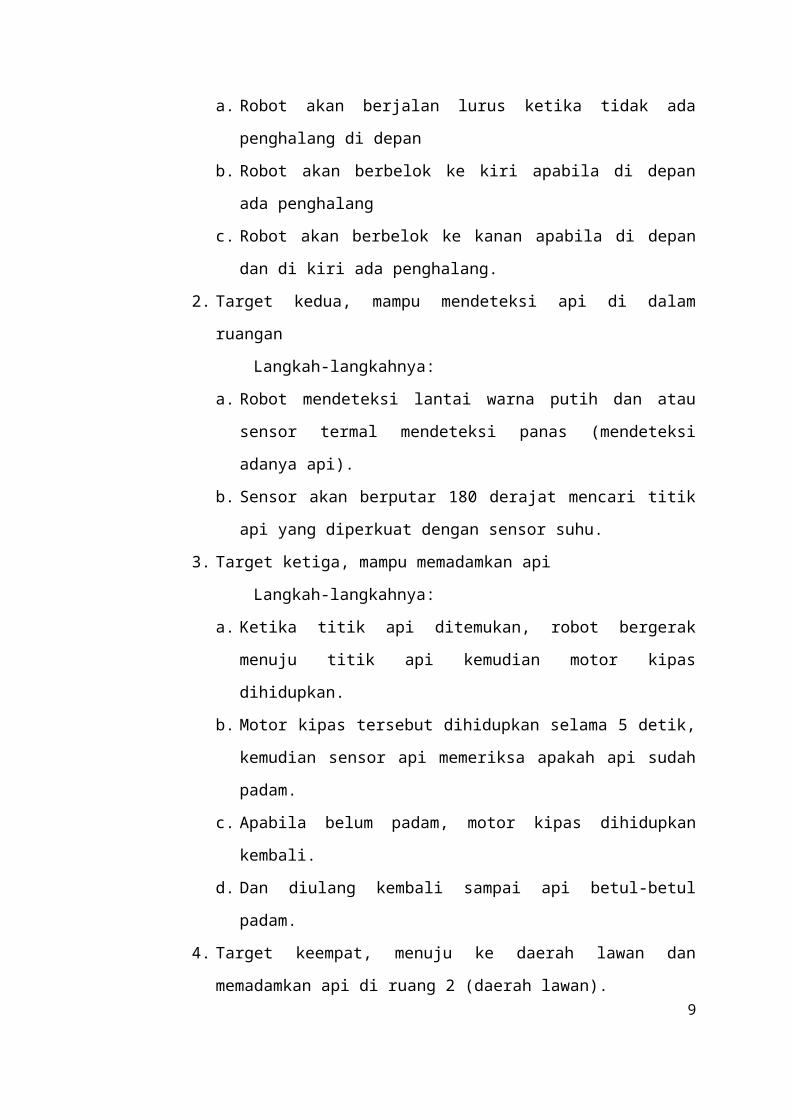
Rangkaian driver dari sensor garis putih ditunjukan seperti pada gambar
di bawah ini.
Gambar 6. Rangkaian driver Photodiode & infrared
2.4.6 Aktivasi SuaraSound activation merupakan metode pengaktifkan robot pada saat start
dengan menggunakan gelombang bunyi. Secara umum sound activation terbagi
menjadi dua, yaitu sound transmitter dan sound receiver. Sound Transmitter
merupakan alat di luar robot yang menghasilkan gelombang bunyi.
5
Gambar 7. Sound Transmitter
Sound receiver merupakan seperangkat alat yang berfungsi seperti
tombol switch tetapi aktif pada saat ada gelombang bunyi pada frekuensi
tertentu. Pada sound receiver terdapat bandpass filter yang hanya bisa
menerima sinyal dengan frekwensi sebesar 3 kHz sampai 4 kHz. Kemudian
dihubungkan dengan rangkaian aktivator pada robot. Blok diagram Sound
Receiver dapat dilihat pada gambar di bawah ini:
Gambar 8. Diagram blok penerima suara
3. Strategi3.1 Target dari robot pemadam api playmaker
1. Target pertama, mampu menelusuri lorong dan menghindari penghalang
Langkah-langkahnya:
a. Robot akan berjalan lurus ketika tidak ada penghalang di depan
b. Robot akan berbelok ke kiri apabila di depan ada penghalang
c. Robot akan berbelok ke kanan apabila di depan dan di kiri ada
penghalang.
2. Target kedua, mampu mendeteksi api di dalam ruangan
Langkah-langkahnya:
6
a. Robot mendeteksi lantai warna putih dan atau sensor termal
mendeteksi panas (mendeteksi adanya api).
b. Sensor akan berputar 180 derajat mencari titik api yang diperkuat
dengan sensor suhu.
3. Target ketiga, mampu memadamkan api
Langkah-langkahnya:
a. Ketika titik api ditemukan, robot bergerak menuju titik api kemudian
motor kipas dihidupkan.
b. Motor kipas tersebut dihidupkan selama 5 detik, kemudian sensor api
memeriksa apakah api sudah padam.
c. Apabila belum padam, motor kipas dihidupkan kembali.
d. Dan diulang kembali sampai api betul-betul padam.
4. Target keempat, menuju ke daerah lawan dan memadamkan api di ruang 2
(daerah lawan).
Gambar 9. Strategi mencari dan mematikan lilin
3.2 Metode pendeteksian bonekaRobot playmaker mendeteksi boneka dengan menggunakan sensor
ultasonic, ketika sensor ultrasonic terhalang maka robot akan menjauhi
halangan tersebut agar robot playmaker tidak menabrak boneka atau
furniture.
7
4. Sketch Robot Playmaker
Gambar 10. Desain robot tampak Isometris
Gambar 11. Desain robot tampak depan
8
Gambar 12. Desain robot tampak samping
Gambar 13. Desain robot tampak atas
9