tugas akhir -...
TRANSCRIPT
TUGAS AKHIR
PENGENDALI POSISI DUA DIMENSI
PREPARAT MIKROSKOP BERKETELITIAN
TINGGI
Oleh:
Rahadian Adista P.
2210039021
Nurul Farida
2210039040
D III TEKNIK ELEKTRO DISNAKERTRANSDUK FTI-ITS
Dosen Pembimbing:
Eko Pramunanto, ST., MT.
Agus Priyono, S.Sos., ST.
1. Mikroskop adalah alat optik yang digunakan untuk
mengamati benda-benda yang berukuran sangat kecil.
2. Penempatan preparat dilakukan dengan penggerak
manual.
3. Dalam kasus – kasus tertentu diperlukan penempatan
yang sangat teliti.
Penggerak posisi preparat mikroskop biasa tidak
dapat memposisikan preparat dengan ketelitian tinggi dan
dengan gerakan yang konsisten .
MASALAH
TUJUAN
Membuat alat pengendali penempatan
preparat mikroskop yang berketelitian tinggi
dan dapat bergerak secara konsisten.

1. Batasan kualitatif
Pengendalian posisi X dan Y preparat mikroskop dengan
sistem mikrokontroler.
2. Batasan kuantitatif
Menggerakkan 25 μm per step sehingga memungkinan
untuk melakukan pengamatan terhadap objek
mikroskopis.
3. Sasaran
Mendapatkan ketepatan dalam menempatkan preparat
mikroskop.

PERANCANGAN MEKANIK
Keypad
PC
Mikrokontroler LCD
Driver Motor
Stepper
Motor Stepper
Penggerak
Preparat
Mikroskop
MEKANISME KERJA

HARDWARE SISTEM
FLOW CHART
Start
Inisialisasi serial port
dan servis interrupt
Baca
keypad
Return
Mikrokontroler Servis interrupt
Start
Kontrol PC
Start
Inisialisasi
ComPort
Pilih
ComPort
Connect
1
Data serial
terkirim
1
Y
T Display LCD
Aksi motor
Aksi motor Tombol
gerak
Baca
interrupt
data
Baca
tombol &
parameter
PENGUJIAN SISTEM MINIMUM
LCD
PENGUJIAN SISTEM MINIMUM
Keypad Komunikasi Serial
PENGUJIAN MOTOR STEPPER Motor 1 :
PENGUJIAN MOTOR STEPPER Motor 2 :
PENGUJIAN POSISI NOL
Bidang X Bidang Y
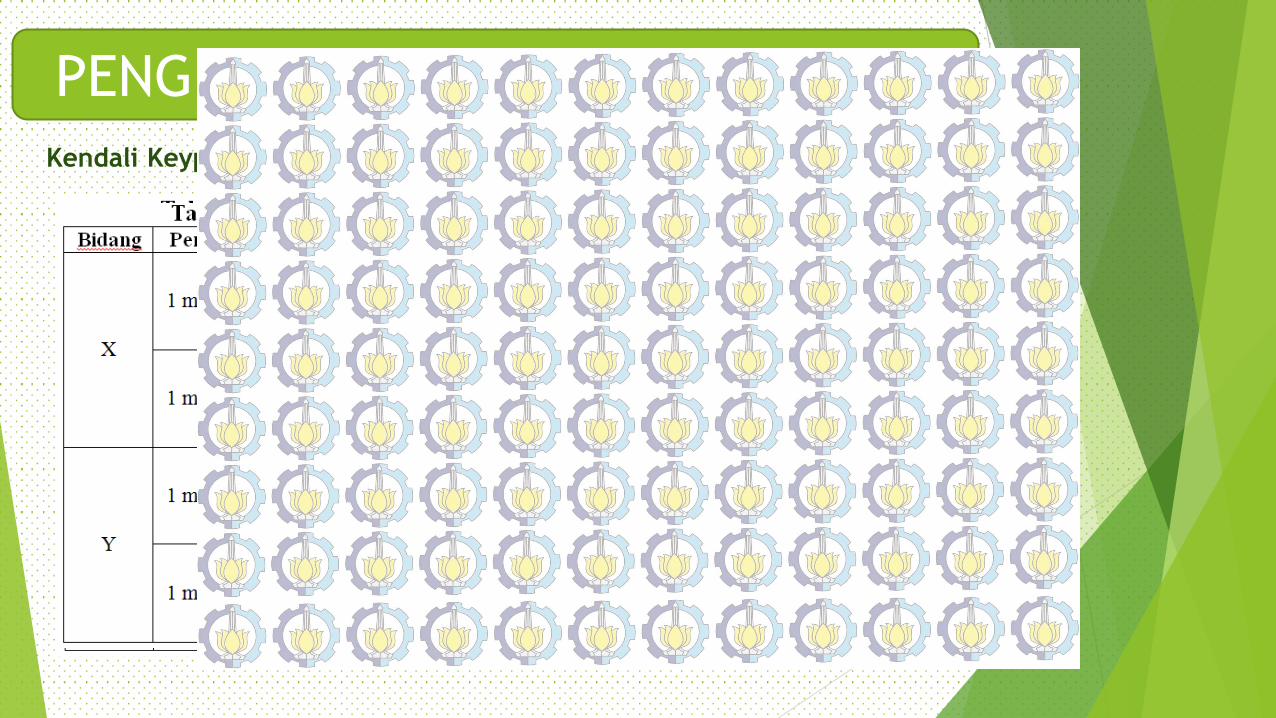
PENGUJIAN PENGGERAK PREPARAT
Kendali Keypad :
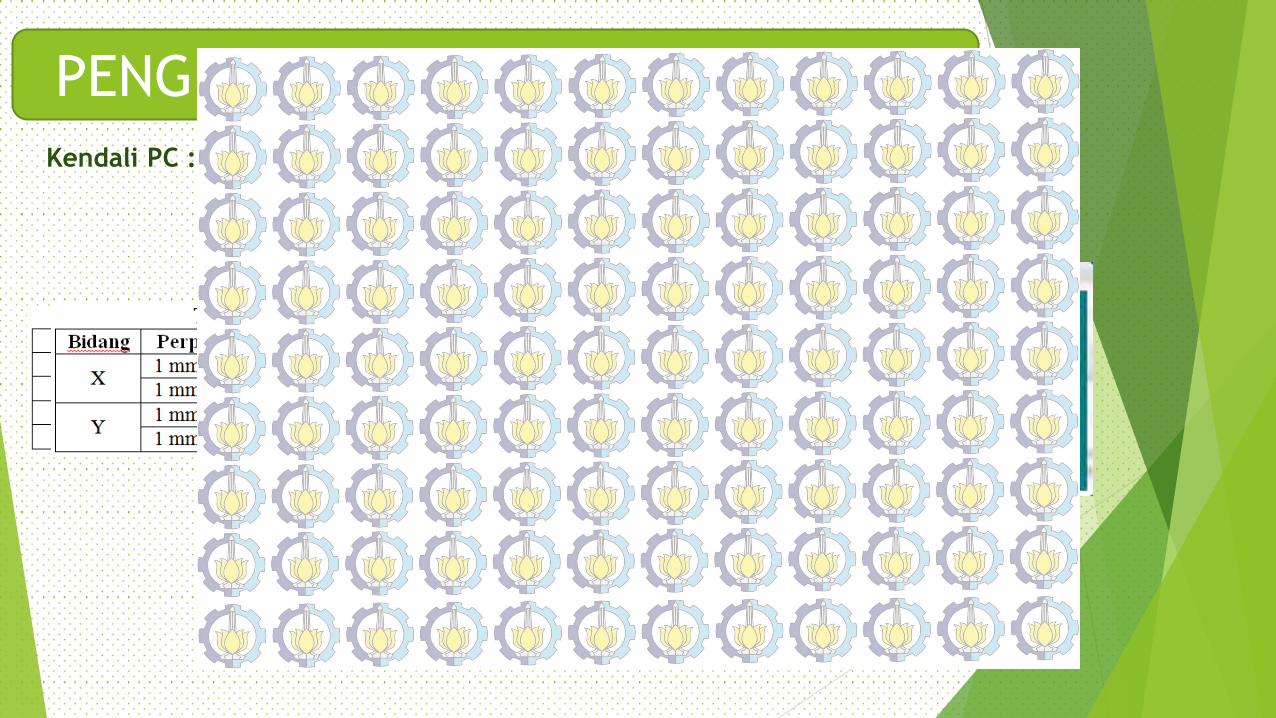
PENGUJIAN PENGGERAK PREPARAT
Kendali PC :
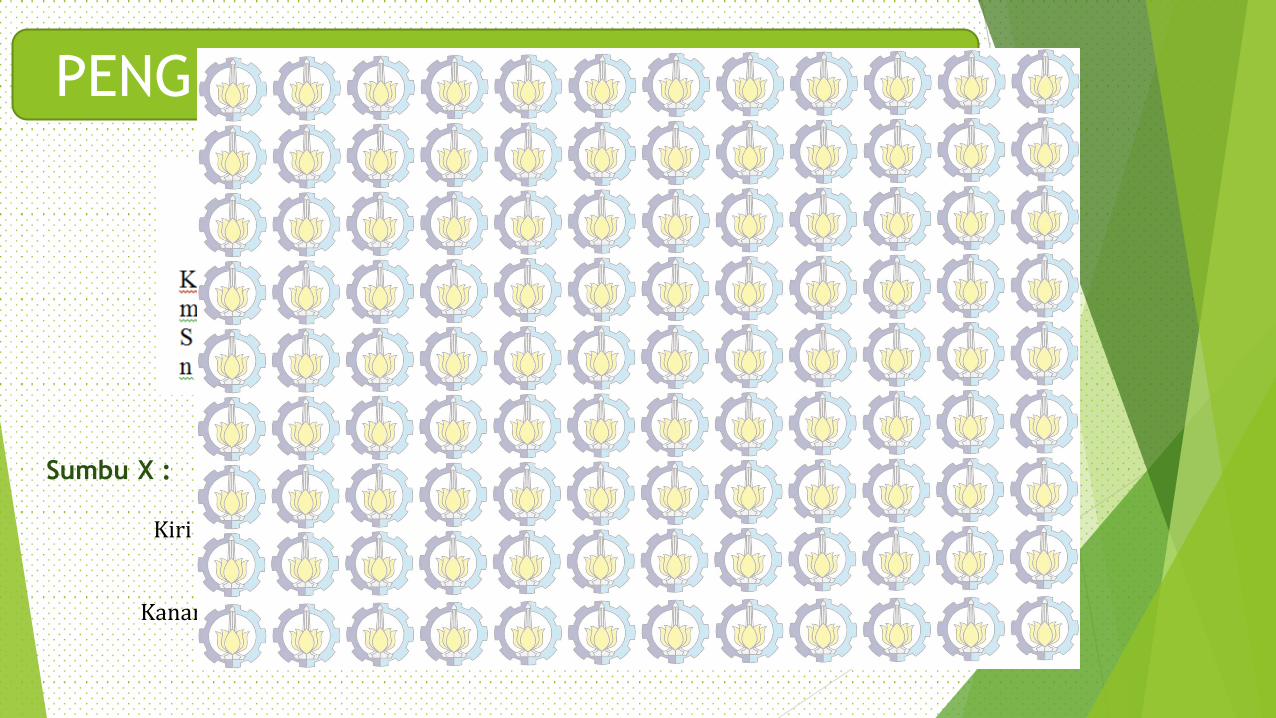
PENGUJIAN PENGGERAK PREPARAT
Sumbu X :
Kiri → m =1
192= 0,005208 mm/𝑠𝑡𝑒𝑝 = 5,208 μm/𝑠𝑡𝑒𝑝
Kanan → m =1
192= 0,005208 mm/𝑠𝑡𝑒𝑝 = 5,208 μm/𝑠𝑡𝑒𝑝
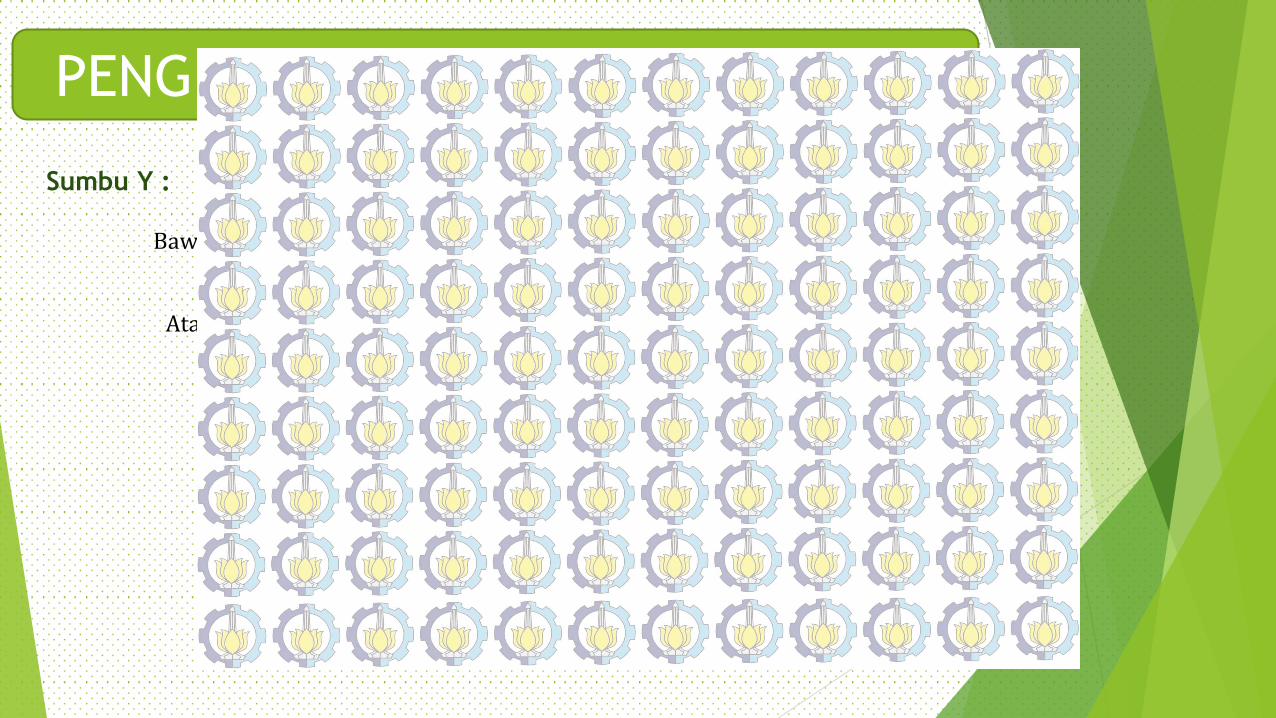
PENGUJIAN PENGGERAK PREPARAT
Sumbu Y :
Bawah → m =1
39= 0,02564 mm/𝑠𝑡𝑒𝑝 = 25,64 μm/𝑠𝑡𝑒𝑝
Atas → m =1
39= 0,02564 mm/𝑠𝑡𝑒𝑝 = 25,64 μm/𝑠𝑡𝑒𝑝
PENGUJIAN PENGGERAK PREPARAT Video Perpindahan Penggerak Preparat Dilihat dari Lensa Okuler
(objek berupa kertas milimeter blok) :
KESIMPULAN
1. LCD mampu menampilkan semua karakter yang
dibutuhkan.
2. Keypad dapat dikonfigurasikan dengan input bidang X, 1
step, 6 step, 28 step, 140 step dan input bidang Y, 1 step,
3 step, 7 step, 13 step.
3. Sistem kendalinya dapat dilakukan melalui keypad dan PC
dengan hasil pengujian data yang sama. Untuk kendali PC,
konfigurasi input bidang X dapat dimasukkan jumlah step
yang diinginkan, seperti pada bidang X dengan input 192
step dan input bidang Y sebesar 39 step.
4. Pergerakan motor stepper sebesar 5,208 μm/step untuk
bidang X dan 25,64 μm/step untuk bidang Y.
5. Limit switch dapat bekerja dengan baik sebagai posisi nol.

TERIMA KASIH