sistem kontrol - universitas brawijayasiskon.elektro.ub.ac.id/wp-content/uploads/2020/02/...komputer...
TRANSCRIPT

LEMBAR PERSETUJUAN
Telah diperiksa dan disetujui isi laporan ini
LAPORAN PRAKTIKUM
SISTEM KONTROL
di
Laboratorium Sistem Kontrol
Jurusan Teknik Elektro Fakultas Teknik
Universitas Brawijaya
Malang
Disusun oleh :
Nama :
NIM :
Periode :
Tanggal :
Mengesahkan, Menyetujui,
Kepala Laboratorium, Koordinator Asisten,
Dr. Ir. ERNI YUDANINGTYAS, MT
NIP. 19650913 199002 2 001 NIM

KEMENTERIAN RISET, TEKNOLOGI, DAN PENDIDIKAN TINGGI
UNIVERSITAS BRAWIJAYA
FAKULTAS TEKNIK
LABORATORIUM SISTEM KONTROL
PERATURAN DAN TATA TERTIB PRAKTIKUM
1. Sebelum mengikuti praktikum, pendaftar wajib mengikuti pre-test sesuai jadwal yang telah
ditetapkan.
2. Sebelum melaksanakan pratikum, praktikan wajib mengerjakan tugas pendahuluan dari
percobaan yang bersangkutan.
3. Selama praktikum :
a. Praktikan wajib memakai baju/kaos berkerah, jas praktikum dan bersepatu.
b. Setiap praktikan wajib memiliki buku praktikum dan kartu peserta praktikum (KPP)
yang harus dilengkapi dengan pas foto.
c. Praktikan harus hadir di laboratorium 5 menit sebelum praktikum dimulai.
d. Toleransi keterlambatan maksimal 15 menit dari waktu percobaan.
e. Apabila terlambat lebih dari 15 menit, maka dianggap telah mengundurkan diri
kecuali telah mendapat ijin dari Koordinator Asisten.
f. Tidak diijinkan pindah kelompok kecuali telah membuat surat ijin dan mendapat
persetujuan Koordinator Asisten.
g. Praktikan harus menyediakan sendiri alat-alat tulis/gambar yang diperlukan.
h. Selama di dalam laboratorium, praktikan dilarang makan, minum, merokok, dan harus
menjaga ketertiban.
i. Untuk setiap percobaan sudah disediakan alat, tempat dan bahan sendiri yang tidak
boleh diubah, diganti atau ditukar kecuali oleh asisten yang bersangkutan.
j. Apabila menjumpai kesalahan, kerusakan, atau ketidaksesuaian dengan buku
praktikum, praktikan harus segera melapor kepada asisten.
k. Setelah selesai menyusun rangkaian sesuai buku praktikum, praktikan harap segera
melapor pada asisten, dan dilarang menghubungkan rangkaian dengan sumber
tegangan sebelum mendapat ijin dari asisten yang bersangkutan.
4. Hal-hal mengenai alat praktikum :
a. Kerusakan alat yang disebabkan oleh kesalahan praktikan menjadi tanggung jawab
kelompok praktikan, dan kelompok tersebut tidak diperkenankan mengikuti praktikum
berikutnya sebelum menyelesaikan tanggung jawabnya.
b. Setiap selesai melaksanakan praktikum, praktikan wajib mengembalikan alat-alat
yang digunakan dan dilarang meninggalkan laboratorium sebelum mendapat ijin dari
asisten yang bersangkutan.
5. Praktikan dikenai sanksi gugur, jika :
a. Tidak mengikuti praktikum sesuai jadwal yang telah ditetapkan.
b. Tidak mengikuti 1 atau lebih percobaan dalam 1 praktikum.
c. Tidak mengikuti pos-test sesuai jadwal yang telah ditetapkan.
6. Jika tidak mengambil surat puas pada masa yang telah ditetapkan, akan mendapat sangsi.
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
KARTU PESERTA PRAKTIKUM
NAMA : ……………………………………………………
NIM : ……………………………………………………
PERIODE : ……………………………………………………
PRAKTIKUM : SISTEM KONTROL
No. Percobaan
Tanggal
Asisten Percobaan Paraf
Praktikum Asistensi
1.
Performansi Model
Sistem dengan
Komputer Analog
NIM.
2.
Penggunaan
Komputer Analog
sebagai Kontroler
NIM.
3.
Penggunaan
Kontroler PID pada
Motor DC Servo
NIM.
4.
Sistem Pengaturan
Temperatur dengan
Kontroler
Proporsional
NIM.
5.
Sistem Pengaturan
Ketinggian Air
Tangki
NIM.
Foto 3 x 4
Penentuan Nilai Surat Puas Berdasar pada :
Nilai Akhir Praktikum = 0,2 N1 + 0,3 N2 + 0,5 N3
N1 : Nilai Pre-Tes
N2 : Nilai Pelaksanaan Praktikum
N3 : Nilai Pos-Tes
Malang, ………………………..
Koordinator Asisten,
…………………………………. NIM. ....................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
PRAKTIKUM
SISTEM KONTROL
PERCOBAAN I
PERFORMANSI MODEL SISTEM DENGAN
KOMPUTER ANALOG
ASISTEN PERCOBAAN : ...................................................................................
NIM : ...................................................................................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
1
PERCOBAAN 1
PERFORMANSI MODEL SISTEM DENGAN KOMPUTER ANALOG
1.1 Tujuan Percobaan
a. Mengetahui fungsi alih model sistem orde satu dan orde dua dengan menggunakan
komputer analog.
b. Mengamati performansi model sistem orde satu dan orde dua dengan masukan unit step.
1.2 Peralatan yang Digunakan
a. PC LAB 2000 SE
b. Seperangkat komputer
c. Setpoint Potensiometer
d. Power Supply +/- 15 V
e. Multimeter
f. Modul Sistem Orde Satu
g. Modul Sistem Orde Dua
1.3 Dasar Teori
1.3.1 Komputer Analog
Komputer analog merupakan salah satu alat yang berguna untuk menganalisis dan
mendesain sistem linier maupun nonlinier. Komputer analog memproses masukan berupa
sinyal/data analog dan menghasilkan keluaran analog. Dengan membuat rangkaian komputer
analog dari suatu sistem berupa rangkaian elektronik (contoh:Op-amp) dapat dilakukan analisis
atau desain dari sistem sebenarnya secara kontinyu. Hal ini sangat menguntungkan karena akan
mengurangi biaya dan waktu. Terutama apabila sistem sebenarnya merupakan sistem yang rumit
dan merupakan bagian sistem yang lebih besar, atau sistem yang tidak dapat dihentikan karena
akan mengganggu proses.
1.3.2 Orde Sistem
Untuk menentukan orde sistem, hal pertama yang harus dilakukan adalah menentukan
fungsi alih sistem tersebut. Fungsi alih sebuah sistem didefinisikan sebagai
n
nn
m
mm
bsbsb
asasa
sR
sC
....
...
)(
)(1
10
1
10 (1.1)
Orde sistem dapat diketahui dengan melihat pangkat tertinggi s pada penyebut fungsi
alih. Fungsi alih dalam Persamaan (1.1) adalah sistem dengan orde n.
1.3.2.1 Sistem Orde Satu
Bentuk umum fungsi alih sistem orde satu dinyatakan sebagai berikut:
1)(
)(
Ts
K
sR
sC (1.2)
dimana T adalah konstanta waktu dan K merupakan penguatan sistem. Kedua parameter ini
menggambarkan perilaku sistem orde satu. Konstanta waktu T berhubungan langsung dengan
waktu penetapan (settling time) yaitu ts = 4T (menggunakan kriteria toleransi 2 %). Sedangkan
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
2
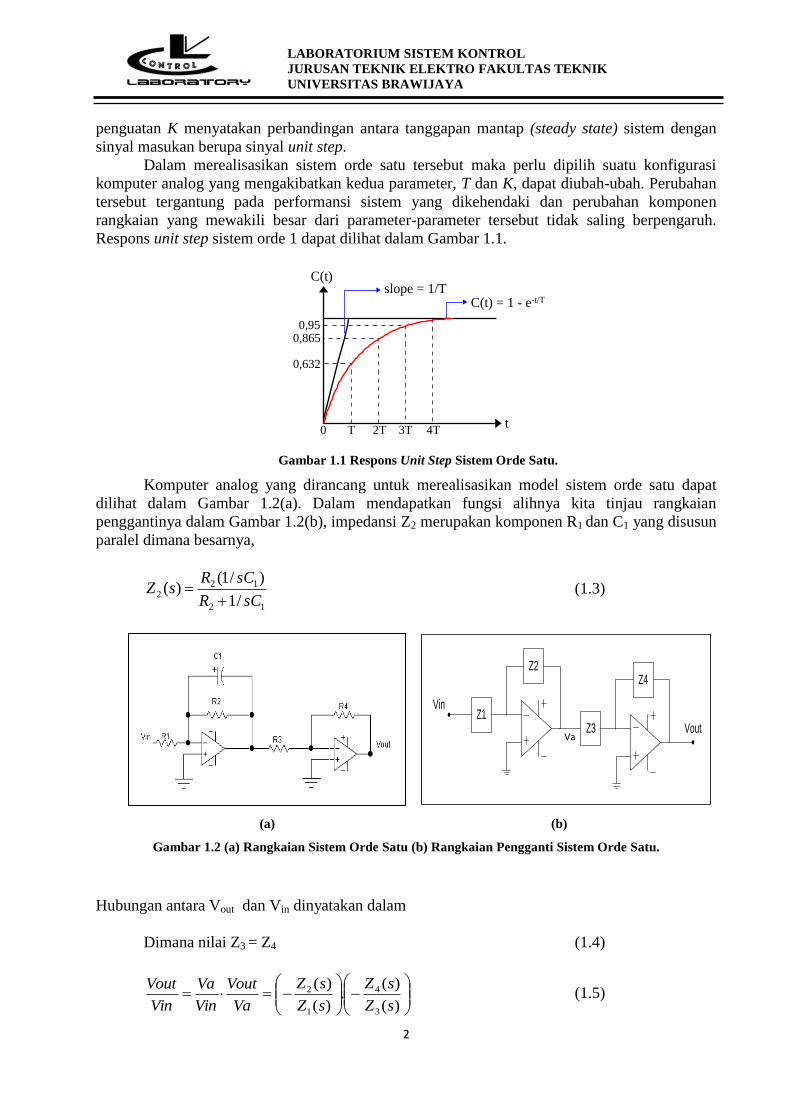
penguatan K menyatakan perbandingan antara tanggapan mantap (steady state) sistem dengan
sinyal masukan berupa sinyal unit step.
Dalam merealisasikan sistem orde satu tersebut maka perlu dipilih suatu konfigurasi
komputer analog yang mengakibatkan kedua parameter, T dan K, dapat diubah-ubah. Perubahan
tersebut tergantung pada performansi sistem yang dikehendaki dan perubahan komponen
rangkaian yang mewakili besar dari parameter-parameter tersebut tidak saling berpengaruh.
Respons unit step sistem orde 1 dapat dilihat dalam Gambar 1.1.
Gambar 1.1 Respons Unit Step Sistem Orde Satu.
Komputer analog yang dirancang untuk merealisasikan model sistem orde satu dapat
dilihat dalam Gambar 1.2(a). Dalam mendapatkan fungsi alihnya kita tinjau rangkaian
penggantinya dalam Gambar 1.2(b), impedansi Z2 merupakan komponen R1 dan C1 yang disusun
paralel dimana besarnya,
12
122
/1
)/1()(
sCR
sCRsZ
(1.3)
Z1
Z2
Z3
Z4
Vin
Vout
(a) (b)
Gambar 1.2 (a) Rangkaian Sistem Orde Satu (b) Rangkaian Pengganti Sistem Orde Satu.
Hubungan antara Vout dan Vin dinyatakan dalam
Dimana nilai Z3 = Z4 (1.4)
)(
)(.
)(
)(
3
4
1
2
sZ
sZ
sZ
sZ
Va
Vout
Vin
Va
Vin
Vout
(1.5)
C(t) = 1 - e-t/T
C(t)slope = 1/T
t0 T 2T 3T 4T
0,632
0,8650,95
Va

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
3
Dengan mensubtitusikan persamaan (1.3) dan (1.4) ke persamaan (1.5) maka didapatkan
fungsi alih rangkaian sistem orde satu pada persamaan (1.6).
1
/
21
12
RsC
RR
Vin
Vout
(1.6)
Dengan melihat pada persamaan (1.5), maka apabila R2 bernilai konstan maka pemilihan
nilai penguatan sistem K ditentukan oleh pemilihan nilai R1 sedangkan pemilihan nilai konstanta
waktu sistem T ditentukan oleh nilai C1. Dengan pemilihan tersebut tampak bahwa perubahan
untuk masing-masing parameter tersebut tidak akan berpengaruh satu sama lain.
Melalui rangkaian di atas dimungkinkan juga untuk membuat sistem orde satu yang tidak
stabil, yaitu dengan cara melepas komponen R2 yang serupa dengan memberikan nilai hambatan
tak hingga pada R2. Penurunan fungsi alih sistem yang tidak stabil tersebut dimulai dengan
mengalikan pembilang dan penyebut fungsi alih sistem pada persamaan (1.6) dengan 21 / RR
sehingga diperoleh,
1121 /
1
RsCRRVin
Vout
(1.7)
Dengan mensubtitusikan nilai tak hingga pada R2 akan menyebabkan suku pertama pada
penyebut persamaan (1.6) menjadi nol sehingga didapat fungsi alih sistem orde satu yang tidak
stabil pada persamaan (1.7).
11
1
RsCVin
Vout
(1.8)
1.3.2.2 Sistem Orde Dua
Bentuk umum fungsi alih sistem orde dua adalah
22
2
2)(
)(
nn
n
ss
K
sR
sC
(1.9)
dengan,
n = frekuensi alamiah tidak teredam
= rasio peredaman sistem
K = penguatan sistem
Untuk merealisasikan sistem orde dua tersebut maka perlu dipilih suatu konfigurasi dari
komputer analog yang mengakibatkan ketiga parameter, n , ,
dan K, dapat diubah-ubah
tergantung pada performansi sistem yang dikehendaki. Perubahan parameter-parameter tersebut
tidak saling berpengaruh satu sama lain.
Komputer analog yang dirancang untuk merealisasikan model sistem orde dua dapat
dilihat dalam Gambar 1.3(a).

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
4
Z1
Z2
Z3
Z4
Vin
Vout
Z7Z5
Z6
A
V2
V1
I1
I2
I3
(a) (b)
Gambar 1.3 (a) Rangkaian Sistem Orde 2 (b) Rangkaian Pengganti Sistem Orde 2.
Impedansi Z2 dan Z4 pada rangkaian pengganti sistem orde 2, Gambar 1.3 (b), dinyatakan
dalam persamaan (1.10) dan (1.11).
12
1)(
sCsZ
(1.10)
dan,
23
234
/1
)/1()(
sCR
sCRsZ
(1.11)
Melalui Hukum Khirchoof pada titik A , 321 III , didapatkan
2
1
7
2
1 Z
V
Z
V
Z
Vin
(1.12)
Hubungan antara V1 dan Vout dapat dinyatakan
outVsZ
sZV
)(
)(
4
3
1
(1.13)
Sedangkan hubungan antara V2 dan Vout dapat dinyatakan
outVsZ
sZV
)(
)(
5
6
2 (1.14)
Dengan mensubtitusikan persamaan (1.13) dan (1.14) ke dalam persamaan (1.12),
memasukan nilai-nilai impedansinya, membuat nilai R4=R5 dan membuat nilai C1=C2=C maka
didapatkan fungsi alih rangkaian sistem orde dua dalam persamaan (1.15).
C2

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
5
2
623
2
2
21
11
1
CRRCRss
CRR
V
V
in
out
(1.15)
Dengan mengubah persamaan (1.15) dalam bentuk lain yang lebih menguntungkan maka fungsi
alih rangkaian sistem orde dua dapat dinyatakan dalam persamaan (1.16).
2
62623
622
2
621
6
11
22
1
RRCs
RRCR
RRs
RRCR
R
V
V
in
out (1.16)
Dengan membandingkan fungsi alih rangkaian sistem orde 2 dalam persamaan (1.16) dengan
persamaan (1.9) maka tampak parameter K, ωn, dan ξ, dapat ditentukan melalui persamaan
(1.17) - (1.19) berikut,
1
6
R
RK (1.17)
3
62
2R
RR (1.18)
62
1
RRCn (1.19)
Agar perubahan komponen rangkaian yang mewakili besar dari parameter-parameter
tersebut tidak mempengaruhi parameter lainnya maka nilai dari R2 dan R6 dibuat tetap.
Sedangkan R1, R3 dan C1 dibuat variabel dimana pemilihan nilai pada ketiga komponen tersebut
dipilih untuk memenuhi performansi tertentu. Pemilihan nilai R1 akan berdampak langsung
pada penguatan sistem, pemilihan R3 akan berdampak langsung pada rasio peredaman sistem ξ,
dan pemilihan nilai C akan berdampak pada frekuensi alamiah tidak teredam sistem ωn.
1.3.2.3 Respons Transien
Karakteristik respons transien suatu sistem terhadap masukan unit step bergantung pada
syarat awal. Untuk dapat membandingkan respons transien berbagai macam sistem, hal yang
biasa dilakukan adalah menggunakan syarat awal standar bahwa sistem mula-mula dalam
keadaan diam sehingga keluaran dan semua turunan terhadap waktunya pada awal respons akan
sama dengan nol. Selanjutnya karakteristik respons secara mudah dapat dibandingkan.
Respons transien suatu sistem kontrol seringkali menunjukkan suatu osilasi teredam
sebelum mencapai keadaan mantapnya. Dalam menentukan karakteristik respons transien suatu
sistem kontrol terhadap masukan unit step, dicari parameter-parameter (performansi sistem)
sebagai berikut:

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
6
1. Waktu penetapan (Settling Time), ts : merupakan waktu yang diperlukan kurva respons
untuk mencapai dan menetap dalam daerah di sekitar nilai akhir yang ukurannya
ditentukan dengan prosentase mutlak dari nilai akhir (biasanya 5 % atau 2 %). Waktu
penetapan ini dikaitkan dengan konstanta waktu terbesar dari sistem kontrol. Kriteria
prosentase kesalahan yang akan digunakan ditentukan dari sasaran disain.
2. Waktu tunda (Delay Time ), td : merupakan waktu yang diperlukan respons untuk
mencapai setengah nilai akhir pada saat lonjakan yang pertama kali.
3. Waktu naik (Rise Time ), tr : merupakan waktu yang diperlukan respons untuk naik dari
10 sampai 90 %, 5 sampai 95 % atau 0 sampai 100 % dari nilai akhir. Untuk sistem orde
dua redaman kurang (Underdamped) digunakan waktu naik 0-100 %, dan untuk sistem
redaman lebih (Overdamped) digunakan waktu naik 10-90 %.
4. Waktu puncak (Peak Time), tp : merupakan waktu yang diperlukan respons untuk
mencapai puncak lewatan (lonjakan maksimal) yang pertama kali.
5. Lewatan maksimum (Maximum Overshoot), Mp : merupakan nilai puncak maksimum
kurva respons yang diukur dari satu. Jika nilai keadaan mantap respons tidak sama
dengan satu, maka dapat digunakan persen lewatan maksimum.
Gambar 1.4 menunjukkan kurva respons sistem orde dua kurang teredam (underdamped) dengan
masukan unit step.
Gambar 1.4 Kurva Respons Sistem Orde Dua Underdamped dengan Masukan Unit Step.
0,05
atau
0,02
1
0,5
c(t)
t
td
tr
tp
ts
Mp
Toleransi yang diperbolehkan
0

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
7
Gambar 1.5 menunjukkan kurva respons sistem orde dua terlalu teredam (overdamped) dengan
masukan unit step.
Gambar 1.5 Kurva Respons Sistem Orde Dua Overdamped dengan Masukan Unit Step.
1.3 Prosedur Percobaan
1.3.1 Sistem Orde Satu
Percobaan dilakukan dengan urutan sebagai berikut :
1) Susun rangkaian sistem orde satu seperti dalam Gambar 1.6.
2) Kemudian hubungkan PC LAB 2000 SE ke komputer untuk dapat melihat respons
rangkaian komputer analog orde satu.
3) Atur keluaran setpoint sesuai dengan petunjuk dari asisten.
4) Lakukan perubahan besar C dan R1 sesuai dengan data dalam Tabel 1.1 pada hasil
percobaan.
5) Buatlah kesimpulan dari percobaan yang telah dilaksanakan.
1.3.2 Sistem Orde Dua
Percobaan dilakukan dengan urutan sebagai berikut :
1) Susun rangkaian sistem orde dua seperti Gambar 1.7.
2) Kemudian hubungkan PC LAB 2000 SE ke komputer untuk dapat melihat respons
rangkaian komputer analog orde dua.
3) Atur keluaran setpoint sesuai dengan petunjuk dari asisten.
4) Lakukan perubahan besar C, R3 dan R1 sesuai dengan data dalam Tabel 1.2 pada hasil
percobaan.
5) Buatlah kesimpulan dari percobaan yang telah dilaksanakan.
0,05
atau
0,02
1 0,9
0,5
0,1
c(t)
t
td
tr
ts
Toleransi yang diperbolehkan
0

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
8
Gambar 1.6 Rangkaian Sistem Orde Satu.
Gambar 1.7 Rangkaian Sistem Orde Dua.
1.4 Tugas
1. Beri keterangan (performansi sistem) pada tiap gambar dalam percobaan.
2. Hitung nilai-nilai performansi menggunakan rumus pada tiap-tiap data dalam tabel
percobaan, dan bandingkan hasilnya dengan data hasil percobaan.
3. Berikan penjelasan bagaimana cara mendapatkan data saat percobaan berlangsung.
4. Berikan penjelasan pada data hasil percobaan anda.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
9
1.5 Hasil Percobaan dan Analisis Data
1.5.1 Sistem Orde Satu
Dalam percobaan ini dipilih 6 buah variasi nilai untuk masing-masing parameter T dan K
yang diwakili oleh pemilihan nilai-nilai R1 dan C1. Adapun untuk membuat model sistem yang
tidak stabil dibuat dengan dengan cara memutus R2. Pemilihan nilai-nilai R1 dan C1 beserta
performansinya dapat dilihat dalam Tabel 1.1. Performansi tersebut didapat dengan membuat R2
konstan sebesar 100 K Ω.
Tabel 1.1 Performansi Sistem Terhadap Perubahan Nilai Komponen R dan C dalam Sistem Orde Satu
No R1
(Ω)
R2
(Ω)
C1
( F) Fungsi Alih Gain
Konstanta
Waktu (T)
Settling
Time
(ts) Teori Praktik
1. 100k 100k 2
2. 100k 100k 5
3. 100k 100k 20
4. 217k 100k 2
1.5.1.1 Grafik Respons Sistem Orde Satu
Gambar 1.8 Grafik Respons Sistem Orde Satu Data ke-1.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
10
Gambar 1.9 Grafik Respons Sistem Orde Satu Data ke-2.
Gambar 1.10 Grafik Respons Sistem Orde Satu Data ke-3.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
11
Gambar 1.11 Grafik Respons Sistem Orde Satu Data ke-4.
1.5.1.2 Kesimpulan
………………………………………………………………………………………………………
………………………………………………………………………………….…..................………
………………………………………………………………………………………………………
……………………………………………………………….……………..................………………
………………………………………………………………………………………………………
………………………………………………….…………………..................………………………
………………………………………………………………………………………………………
………………………………………………….…………..................………………………………
………………………………………………………………………………………………………
……………………………………………………...................………………………………………
………………………………………………………………………………………………………
………………………………………….…..................………………………………………………
………………………………………………………………………………………………………
…………………………….………..................………………………………………………………
………………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
12
…………………….………..................………………………………………………………………
………………………………………………………………………………………………………
………………….…..................………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
……………………………………………………………………………………...................………
………………………………………………………………………………………………………
………………………………………………………………………….…..................………………
………………………………………………………………………………………………………
……………………………………………………………………...................………………………
………………………………………………………………………………………………………
……………………………………………………………...................………………………………
………………………………………………………………………………………………………
……………………………………………………...............................................................................
1.5.2 Sistem Orde Dua
Pemilihan nilai-nilai R1, R3 dan C pada percobaan ini dan performansi yang akan
ditimbulkan oleh pemilihan tersebut dapat dilihat dalam Tabel 1.2. Performansi tersebut didapat
dengan memilih R2, R4, R5 dan R6 bernilai konstan yang besarnya, 50 KΩ, 100 KΩ, 100 KΩ,
dan 400 KΩ.
Tabel 1.2 Nilai – nilai Komponen pada Percobaan Sistem Orde Dua
No R1
(Ω)
R3
(Ω)
R6
(Ω)
C
( F) Fungsi Alih Gain ξ ωn
(Hz)
Performansi
ts
(s)
td
(s)
tr
(s)
tp
(s)
Mp
(%)
1. 400k 140k 400k 3
2. 400k 200k 400k 3
3. 400k 200k 400k 2
4. 400k 140k 400k 2

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
13
1.5.2.1 Grafik Respons Sistem Orde Dua
Gambar 1.12 Grafik Respons Sistem Orde Dua Data ke-1.
Gambar 1.13 Grafik Respons Sistem Orde Dua Data ke-2.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
14
Gambar 1.14 Grafik Respons Sistem Orde Dua Data ke-3.
Gambar 1.15 Grafik Respons Sistem Orde Dua Data ke-4.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
15
1.5.2.2 Kesimpulan
………………………………………………………………………………………………………
…………………………………………………………………………………...................…………
………………………………………………………………………………………………………
…………………………………………………………………………...................…………………
………………………………………………………………………………………………………
…………………………………………………………………...................…………………………
………………………………………………………………………………………………………
…………………………………………………………...................…………………………………
………………………………………………………………………………………………………
…………………………………………………...................…………………………………………
………………………………………………………………………………………………………
…………………………………………...................…………………………………………………
………………………………………………………………………………………………………
…………………………………...................…………………………………………………………
………………………………………………………………………………………………………
…………………………...................…………………………………………………………………
1.6 Tugas
………………………………………………………………………………………………………
………………………………………………………………………………….……………………
………………………………………………………………………………………………………
………………………………………………….……………...……………………………………
………………………………………………………………………………………………………
…………………………….…………………...……………………………………………………
………………………………………………………………………………………………………
…………………….…………...……………………………………………………………………
………………………………………………………………………………………………………
………………....……………………………………………………………………………………
…………………………………………………………………………………………………….…..
.………………………………………………………………………………………………………
………………………………………………………………………….………...…………………
………………………………………………………………………………………………………
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
16
………………………………………………………….………...…………………………………
…………………………………………………………………..……………………………………
……………………………………………….…...…………………………………………………
………………………………………………………………………………………………………
…………………….……………...…………………………………………………………………
……………………………………………………………………………………………………….
…………………...……………………………………………………………………………………
…………………………………………………………………………………………….…………..
.………………………………………………………………………………………………………
……………………………………………………………………………………....………………
………………………………………………………………………………………………………
………………………………………………………………….…...………………………………
………………………………………………………………………………………………………
…………………………………………….………...………………………………………………
………………………………………………………………………………………………………
…………………………….………...………………………………………………………………
………………………………………………………………………………………………………
…………………………………………………………………………………………….…………
………………………………………………………………………………………………………
…………………………………………………………….……………...…………………………
………………………………………………………………………………………………………
……………………………………….…………………...…………………………………………
………………………………………………………………………………………………………
……………………………….…………...…………………………………………………………
………………………………………………………………………………………………………
…………………………....…………………………………………………………………………
………………………………………………………………………………………………………
……….…...…………………………………………………………………………………………
……………………………………………………………………………………….………...……
………………………………………………………………………………………………………
……………………………………………………………………………………….………...……
………………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
PRAKTIKUM
SISTEM KONTROL
PERCOBAAN II
PENGGUNAAN KOMPUTER ANALAOG
SEBAGAI KONTROLER
ASISTEN PERCOBAAN : ...................................................................................
NIM : ...................................................................................
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
17
PERCOBAAN 2
PENGGUNAAN KOMPUTER ANALOG SEBAGAI KONTROLER
2.1 Tujuan
a. Memahami macam-macam karakteristik kontroler
b. Memahami pengaruh pemakaian rangkaian kontroler P, PI, dan PID pada plant orde 1
dan orde 2
2.2 Peralatan yang Digunakan
a. Seperangkat computer
b. PC LAB PCSU1000
c. Setpoint Potensiometer
d. Power Supply +/- 15 V
e. Multimeter.
f. PID Kontroler.
g. Modul Sistem Orde 1.
h. Modul Sistem Orde 2.
2.3 Dasar Teori
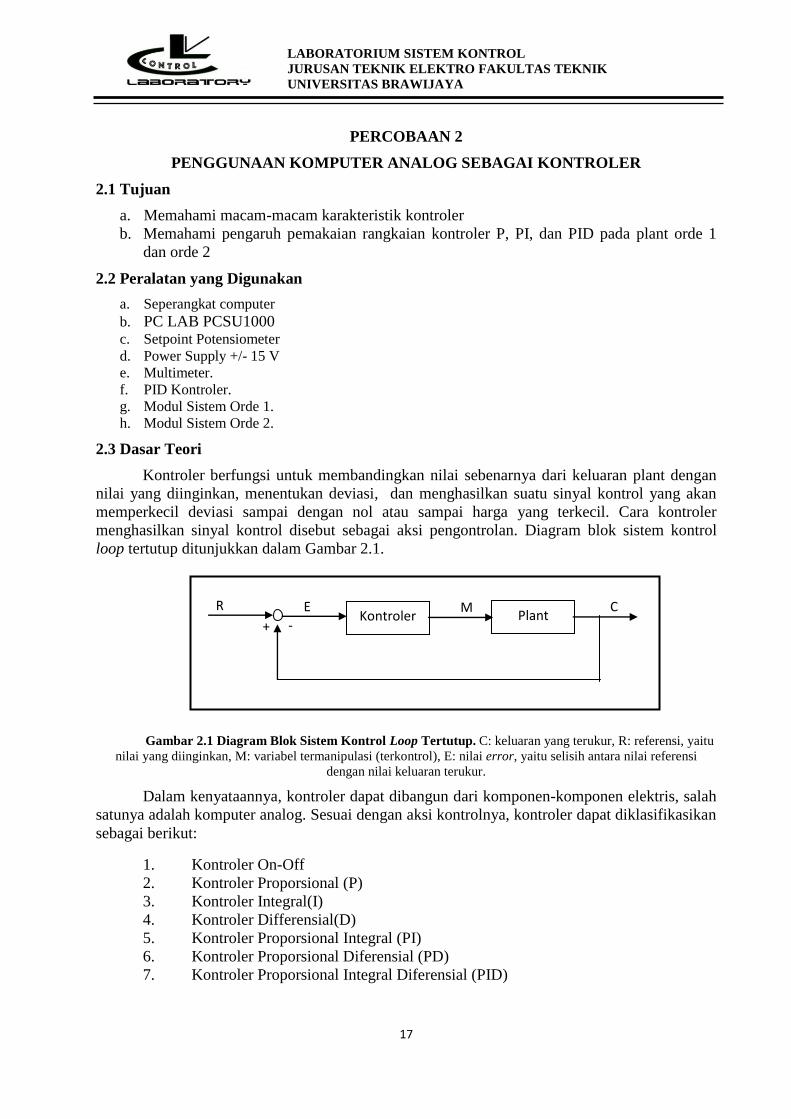
Kontroler berfungsi untuk membandingkan nilai sebenarnya dari keluaran plant dengan
nilai yang diinginkan, menentukan deviasi, dan menghasilkan suatu sinyal kontrol yang akan
memperkecil deviasi sampai dengan nol atau sampai harga yang terkecil. Cara kontroler
menghasilkan sinyal kontrol disebut sebagai aksi pengontrolan. Diagram blok sistem kontrol
loop tertutup ditunjukkan dalam Gambar 2.1.
Gambar 2.1 Diagram Blok Sistem Kontrol Loop Tertutup. C: keluaran yang terukur, R: referensi, yaitu
nilai yang diinginkan, M: variabel termanipulasi (terkontrol), E: nilai error, yaitu selisih antara nilai referensi
dengan nilai keluaran terukur.
Dalam kenyataannya, kontroler dapat dibangun dari komponen-komponen elektris, salah
satunya adalah komputer analog. Sesuai dengan aksi kontrolnya, kontroler dapat diklasifikasikan
sebagai berikut:
1. Kontroler On-Off
2. Kontroler Proporsional (P)
3. Kontroler Integral(I)
4. Kontroler Differensial(D)
5. Kontroler Proporsional Integral (PI)
6. Kontroler Proporsional Diferensial (PD)
7. Kontroler Proporsional Integral Diferensial (PID)
Kontroler Plant E R M C
+ -

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
18
2.3.1 Kontroler Proporsional
Kontroler proporsional, keluarannya selalu sebanding dengan masukannya. Seperti
terlihat dalam Gambar 2.1 bahwa masukan kontroler adalah sinyal error, sehingga kontroler
proporsional selalu memerlukan error untuk menghasilkan output. Hal ini menyebabkan
terjadinya offset (error steady state) pada pemakaian kontroler proporsional. Skema kontroler
proporsional ditunjukkan dalam Gambar 2.2.
Gambar 2.2 Skema Kontroler Proporsional.
Hubungan antara keluaran kontroler m(t) dan sinyal error e(t) pada kontroler
proporsional adalah :
21 R
tmteg
R
tegte
(2.1)
karena
0teg
maka
12 RtmRte (2.2)
teR
Rtm
1
2 (2.3)
teKtm p . (2.4)
atau dalam transformasi Laplace:
pKsEsM
dengan Kp adalah gain ( penguatan proporsional ).
2.3.2 Kontroler Integral
Untuk menghilangkan offset yang terjadi akibat pemakaian kontroler proporsional maka
digunakanlah kontroler integral. Kontroler integral dapat menghasilkan output walaupun sudah
tidak ada input, namun reaksi dari kontroler ini sangat lambat. Skema kontroler integral
ditunjukkan dalam Gambar 2.3.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
19
Gambar 2.3 Skema Kontroler Integral.
Pada kontroler integral, nilai keluaran m(t) diubah dengan laju yang sebanding dengan
sinyal error e(t), sehingga
dtteKtm
tmdt
dC
R
te
tmtegdt
dC
R
tegte
i
i
i
i
i
Ki merupakan konstanta yang dapat diatur. Dengan menggunakan transformasi Laplace dapat
dinyatakan sebagai
s
K
sE
sM i (2.8)
dengan
i
p
iT
KK
Besarnya konstanta waktu integral Ti dapat dinyatakan oleh
iii RCT
2.3.3 Kontroler Diferensial
Kontroler ini digunakan untuk memperbaiki atau mempercepat respons transien sebuah
sistem kontrol dengan cara memperbesar phase lead terhadap penguatan kontrol dan
mengurangi phase lag penguatan tersebut. Tipe D ini jika dipakai sendiri maka tidak akan
memberikan respons terhadap kesalahan dalam kondisi mantap sehingga perlu digabung dengan
P atau PI. Hal ini disebabkan kontroler D tidak dapat mengeluarkan output bila tidak ada
perubahan input, selain itu kontroler D tidak dapat dipakai untuk proses yang mengandung
noise. Skema kontroler diferensial ditunjukkan dalam Gambar 2.4.
(2.5)
(2.6)
(2.7)

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
20
Gambar 2.4 Skema Kontroler Diferensial.
Hubungan sinyal kontrol m(t) dengan sinyal error e(t) dari kontroler diferensial dapat
dinyatakan dengan :
tedt
dCRtm
R
tmtegtegte
dt
dC
dd
d
atau dalam transformasi Laplace dinyatakan dengan :
sKsEsM d . (2.11)
dengan
dpd TKK .
besarnya Td dapat dinyatakan oleh
ddd RCT
2.3.4 Kontroler Proporsional Integral (PI)
Aksi kontroler proporsional integral dinyatakan dalam persamaan :
m(t) = Kp e(t) + Kp / Ti e(t) dt (2.12)
dengan menggunakan transformasi Laplace dinyatakan dengan
M(s) / E(s) = Kp ( 1 + 1/ Ti s ) (2.13)
dengan
Kp menyatakan penguatan
Ti menyatakan konstanta waktu integral
dimana Kp dan Ti dapat diatur.
2.3.5 Kontroler Proporsional Diferensial (PD)
Aksi kontroler proporsional diferensial dinyatakan dalam persamaan :
(2.9)
(2.10)

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
21
dt
tdeTKteKtm dpp (2.14)
atau dalam transformasi Laplace dinyatakan dengan :
M(s) / E(s) = Kp ( 1 + Td s ) (2.15)
Dengan
Kp menyatakan penguatan
Td menyatakan konstanta waktu diferensial
dimana Kp dan Td dapat diatur.
2.3.6 Kontroler Proporsional Integral Diferensial (PID)
Gabungan aksi kontrol proporsional, integral, dan diferensial mempunyai keunggulan
dibandingkan dengan masing–masing dari tiga aksi kontrol tersebut. Persamaan kontroler PID
ini dapat dinyatakan sebagai berikut:
m(t) = Kp e(t) + Kp / Ti e(t) dt + Kp Td de(t) / dt (2.16)
dalam transformasi Laplace dinyatakan sebagai
) s Td s Ti
1 1 ( Kp
)(
)(
sE
sM (2.17)
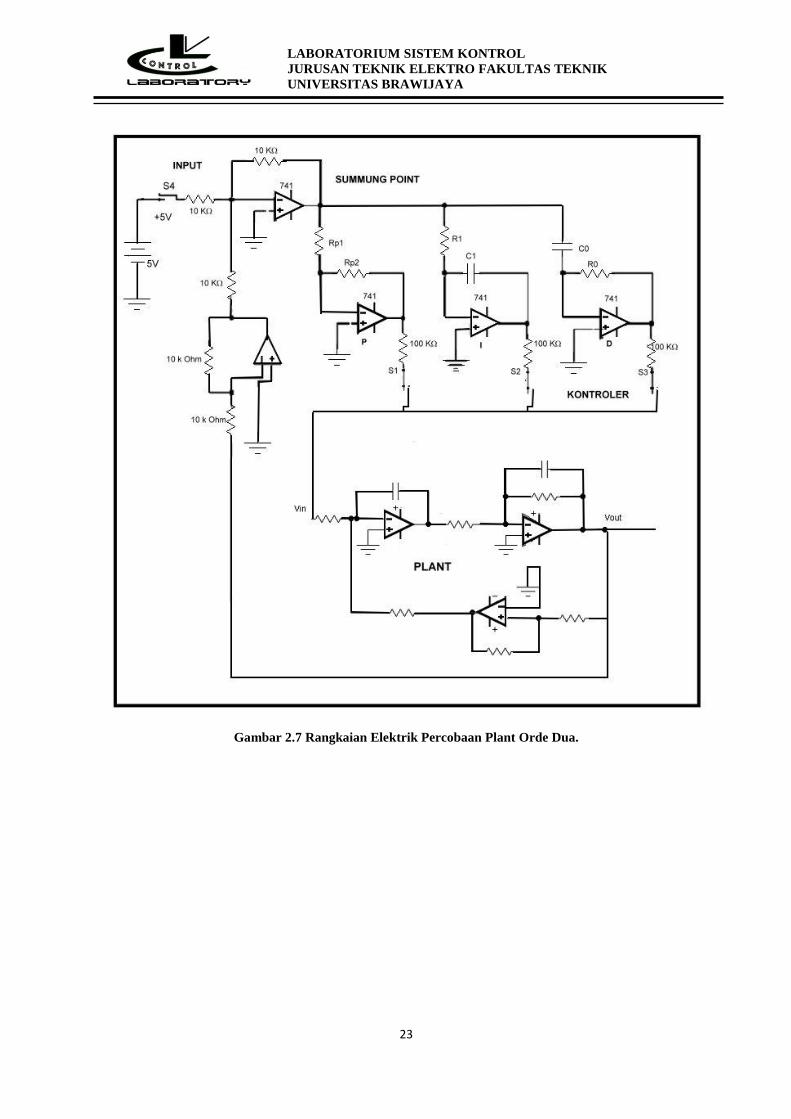
2.4 Rangkaian Plant Sistem Orde Satu dan Orde Dua
Rangkaian secara kompleks sistem orde satu dan dua dalam percobaan 2 ini telah
dijabarkan sebelumnya pada dasar teori percobaan 1. Bentuk fisik modul sistem orde satu dan
dua ditunjukkan dalam Gambar 2.5.
R1
R2
C
Sistem Orde 1
K
T + 1s
Kilo OhmMikro Farad
100
68
82
150200
217
2
3
4
510
20 100K
+15 V
0 V
-15 V
K=
T= R C2
R2
R1
R6
400K
R3 R1C
Sistem Orde 2
Kilo OhmKilo OhmMikro Farad
200
300
400
500600
700
50
70
80
140200
0,5
1
2
34
+15 V
0 V
R = 50 Kilo OhmR = 10 Kilo Ohm
2
4 R = 5
K n
nn s +s + 2
2
22
R6
R R2 6
R R2 6
R1
2R3
K =
n
=
=1
C
(a) (b)
Gambar 2.5 Mekanik Plant. (a) Mekanik Plant orde 1 (b) Mekanik Plant orde 2

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
22
2.4 Percobaan
2.4.1 Rangkaian Percobaan
Gambar 2.6 Rangkaian Elektrik Percobaan Plant Orde Satu.
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
23
Gambar 2.7 Rangkaian Elektrik Percobaan Plant Orde Dua.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
24
Gambar 2.8 Rangkaian Percobaan Untuk Plant Orde Satu Menggunakan Kontroler PID.
Gambar 2.9 Rangkaian Percobaan Untuk Plant Orde Dua Menggunakan Kontroler PID.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
25
2.4.2 Prosedur Percobaan Kontroler Proporsional (P)
2.4.2.1 Plant Orde Satu
Percobaan ini merupakan percobaan loop tertutup dengan plant orde satu. Langkah
pelaksanaan percobaan ini adalah sebagai berikut :
1) Rangkaikan modul praktikum seperti dalam Gambar 2.7.
2) Sambungkan device PC LAB PCSU1000 telah tersambung pada PC.
3) Atur modul setpoint potensiometer sehingga mengeluarkan tegangan UW = 5 volt dengan
memutar potensiometer dan diukur dengan multimeter.
4) Atur pada modul orde satu, R1 = 68 kΩ, C = 2µF dan R2 = 100 kΩ
5) Atur nilai Kp seperti pada Tabel 2.1, I off, D off.
6) Ubah Kp sesuai dengan Tabel 2.1 dan kemudian amati keluaran respons pada program
PC LAB PCSU1000.
7) Lengkapi Tabel 2.1 sesuai dengan hasil pengamatan pada percobaan.
2.4.2.2 Plant Orde Dua
Percobaan ini merupakan percobaan loop tertutup dengan plant orde dua. Langkah
pelaksanaan percobaan ini adalah sebagai berikut :
1) Rangkaikan modul praktikum seperti dalam Gambar 2.8.
2) Sambungkan device PC LAB PCSU1000 telah tersambung pada PC.
3) Atur modul setpoint potensiometer sehingga mengeluarkan tegangan UW = 5 volt dengan
memutar potensiometer dan diukur dengan multimeter.
4) Atur pada modul orde dua, R1 = 200 kΩ, C = 3 µF dan R3 = 140 kΩ
5) Atur nilai Kp seperti pada Tabel 2.2, I off, D off.
6) Ubah Kp sesuai dengan Tabel 2.2 dan kemudian amati respons pada program PC LAB
PCSU1000.
7) Lengkapi Tabel 2.2 sesuai dengan hasil percobaan.
2.4.3 Prosedur Percobaan Kontroler Proporsional Integral (PI)
2.4.3.1 Plant Orde 1
Percobaan ini merupakan percobaan loop tertutup dengan plant orde satu. Langkah
pelaksanaan percobaan ini adalah sebagai berikut :
1) Rangkaikan modul praktikum seperti dalam Gambar 2.7.
2) Sambungkan device PC LAB PCSU1000 telah tersambung pada PC.
3) Atur modul setpoint potensiometer sehingga mengeluarkan tegangan UW = 5 volt dengan
memutar potensiometer dan diukur dengan multimeter.
4) Atur pada modul orde satu, R1 = 68 kΩ, C = 2 µF dan R2 = 100 kΩ
5) Kemudian atur nilai gain pada modul kontroler PID, Kp = 2, I on, D off.
6) Ubah Tn/s sesuai dengan Tabel 2.3 dan kemudian amati respons pada program PC LAB
PCSU1000
7) Lengkapi Tabel 2.3 sesuai dengan hasil percobaan.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
26
2.4.3.2 Plant Orde Dua
Percobaan ini merupakan percobaan loop tertutup dengan plant orde dua. Langkah
pelaksanaan percobaan ini adalah sebagai berikut :
1) Rangkaikan modul praktikum seperti dalam Gambar 2.8.
2) Sambungkan device PC LAB PCSU1000 telah tersambung pada PC.
3) Atur modul setpoint potensiometer sehingga mengeluarkan tegangan UW = 5 volt dengan
memutar potensiometer dan diukur dengan multimeter.
4) Atur pada modul orde dua, R1 = 200 kΩ, C = 3 µF dan R3 = 140 kΩ
5) Kemudian atur nilai gain pada modul kontroler PID, Kp = 2, I on, D off.
6) Ubah Tn/s sesuai dengan Tabel 2.4 dan kemudian amati respons pada program PC LAB
PCSU1000
7) Lengkapi Tabel 2.4 sesuai dengan hasil percobaan.
2.4.4 Prosedur Percobaan Kontroler Proporsional Integral Diferensial (PID)
2.4.4.1 Plant Orde Satu
Percobaan ini merupakan percobaan loop tertutup dengan plant orde satu. Langkah
pelaksanaan percobaan ini adalah sebagai berikut :
1) Rangkaikan modul praktikum seperti dalam Gambar 2.7.
2) Sambungkan device PC LAB PCSU1000 telah tersambung pada PC.
3) Atur modul setpoint potensiometer sehingga mengeluarkan tegangan UW = 5 volt dengan
memutar potensiometer dan diukur dengan multimeter.
4) Atur pada modul orde satu, R1 = 68 kΩ, C = 2 µF dan R2 = 100 kΩ
5) Kemudian atur nilai gain pada modul kontroler PID, Kp = 2, Tn/s = 1, D on.
6) Ubah Tv/s sesuai dengan Tabel 2.5 dan kemudian amati respons pada program PC LAB
PCSU1000
7) Lengkapi Tabel 2.5 sesuai dengan hasil percobaan.
2.4.4.2 Plant Orde Dua
Percobaan ini merupakan percobaan loop tertutup dengan plant orde dua. Langkah
pelaksanaan percobaan ini adalah sebagai berikut :
1) Rangkaikan modul praktikum seperti dalam Gambar 2.8.
2) Sambungkan device PC LAB PCSU1000 telah tersambung pada PC.
3) Atur modul setpoint potensiometer sehingga mengeluarkan tegangan UW = 5 volt dengan
memutar potensiometer dan diukur dengan multimeter.
4) Atur pada modul orde dua, R1 = 200 kΩ, C = 3 µF dan R3 = 140 kΩ
5) Ubah Tv/s sesuai dengan Tabel 2.6 dan kemudian amati respons pada program PC LAB
PCSU1000
6) Kemudian atur nilai gain pada modul kontroler PID, Kp = 2, Tn/s = 1, D on.
7) Lengkapi Tabel 2.6 sesuai dengan hasil percobaan.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
27
2.5 Hasil Percobaan dan Analisis Data
2.5.1 Kontroler Proporsional pada Plant Orde Satu
Tabel 2.1Performasnsi Sistem Terhadap Perubahan Nilai Komponen R
pada Kontroler P Plant Orde Satu
No Gain R2(k) R1(k) Overshoot (%) Settling Time (s)
1 0.5 100 200
2 1 100 100
3 2 100 50
4 5 100 20
Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
28
2.5.2 Kontroler Proporsional pada Plant Orde Dua
Tabel 2.2 Performansi Sistem Terhadap Perubahan Gain
pada Kontroler P Plant Orde Dua
No Gain Overshoot (%) Settling Time (s)
1 0.5
2 1
3 2
4 5
Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
29
2.5.3 Kontroler Proporsional Integral pada Plant Orde Satu
Tabel 2.3 Performansi Sistem Terhadap Perubahan Nilai Gain
pada Kontroler PI Plant Orde Satu
No Gain Overshoot (%) Settling Time (s)
1 0.1
2 0.2
3 0.5
4 2
Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
30
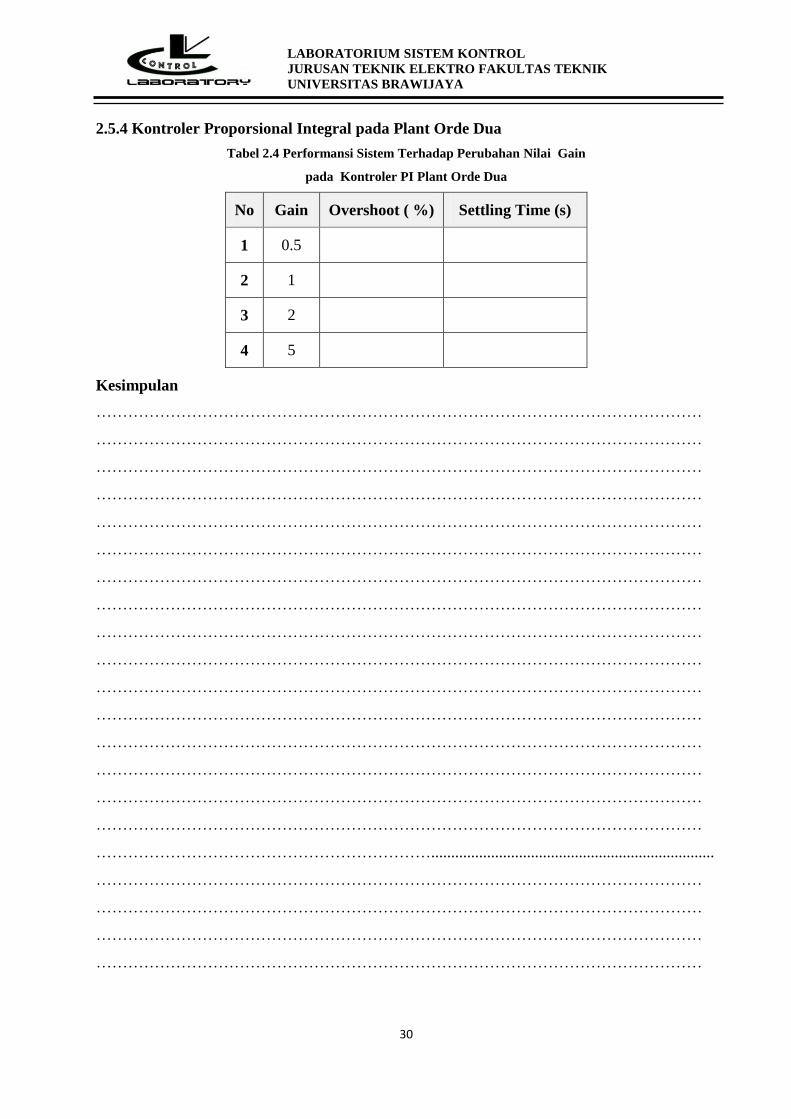
2.5.4 Kontroler Proporsional Integral pada Plant Orde Dua
Tabel 2.4 Performansi Sistem Terhadap Perubahan Nilai Gain
pada Kontroler PI Plant Orde Dua
No Gain Overshoot ( %) Settling Time (s)
1 0.5
2 1
3 2
4 5
Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………….......................................................................
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
31
2.5.5 Kontroler Proporsional Integral Diferensial pada Plant Orde Satu
Tabel 2.5 Performansi Sistem Terhadap Perubahan Nilai Gain
pada Kontroler PID Plant Orde Satu
No Gain Overshoot (%) Settling Time (s)
1 0.02
2 0.03
3 0.04
4 0.2
Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
…………………………………………………...............................................................................
……………………………………………………………………………………………………
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
32
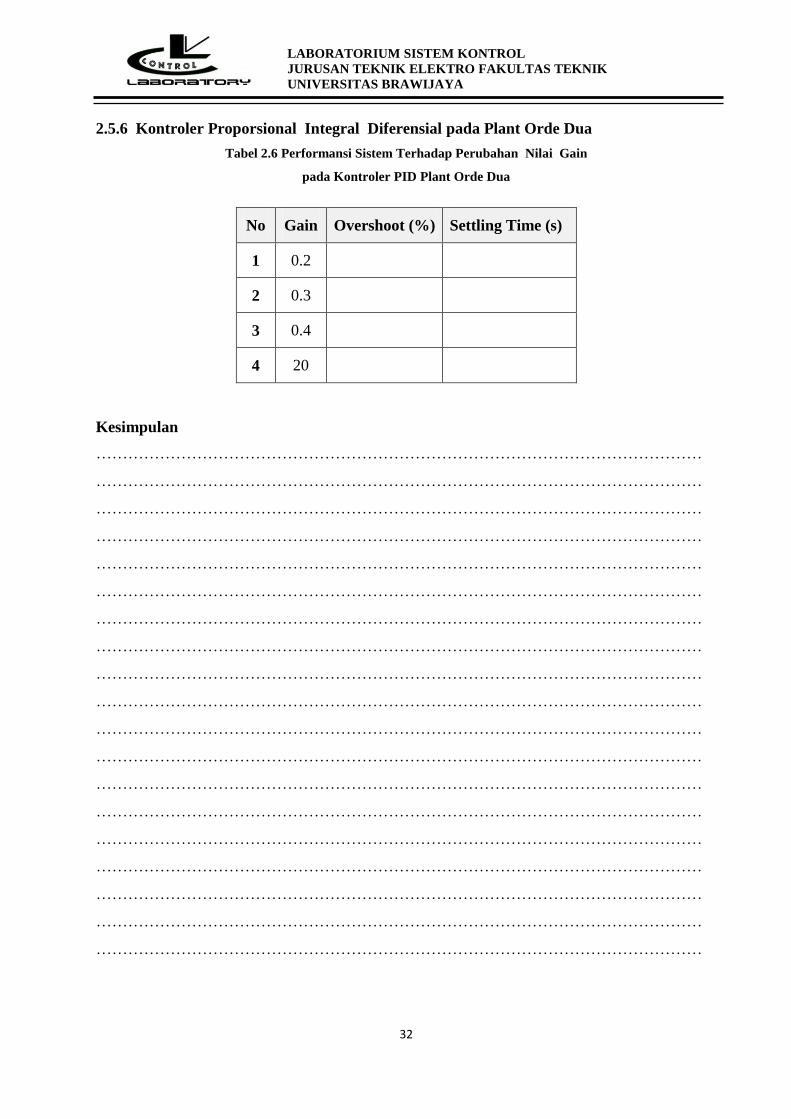
2.5.6 Kontroler Proporsional Integral Diferensial pada Plant Orde Dua
Tabel 2.6 Performansi Sistem Terhadap Perubahan Nilai Gain
pada Kontroler PID Plant Orde Dua
No Gain Overshoot (%) Settling Time (s)
1 0.2
2 0.3
3 0.4
4 20
Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
33
2.6 Grafik Respons
2.6.1 Grafik Respons Kontroler Proporsional pada Plant Orde Satu
Grafik Data ke- 1 Grafik Data ke-2
Grafik Data ke- 4 Grafik Data ke-3

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
34
2.6.2 Grafik Respons Kontroler Proporsional pada Plant Orde Dua
Grafik Data ke-1 Grafik Data ke-2
Grafik Data ke-3 Grafik Data ke-4

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
35
2.6.3 Grafik Respons Kontroler Proporsional Integral pada Plant Orde Satu
Grafik Data ke-1
Grafik Data ke-2
Grafik Data ke-3 Grafik Data ke-4
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
36
2.6.4 Grafik Respons Kontroler Proporsional Integral pada Plant Orde Dua
Grafik Data ke-1 Grafik Data ke-2
Grafik Data ke- 3 Grafik Data ke- 4

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
37
2.6.5 Grafik Respons Kontroler Proporsional Integral Diferensial pada Plant Orde 1
Grafik Data ke-1 Grafik Data ke-2
Grafik Data ke-3 Grafik Data ke-4

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
38
2.6.6 Grafik Respons Kontroler Proporsional Integral Diferensial pada Plant Orde 2
Grafik Data ke-1 Grafik Data ke-2
Grafik Data ke- 3 Grafik Data ke- 4
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
39
2.7 Analisis Data
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
40
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
…………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
PRAKTIKUM
SISTEM KONTROL
PERCOBAAN III
PENGGUNAAN KONTROLER PID
PADA MOTOR DC SERVO
ASISTEN PERCOBAAN : ...................................................................................
NIM : ...................................................................................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
41
PERCOBAAN 3
PENGGUNAAN KONTROLER PID PADA MOTOR DC SERVO
3.1 Tujuan
Setelah melaksanakan percobaan penggunaan kontroler PID pada motor DC servo,
diharapkan praktikan:
a. Dapat mengetahui cara kerja dari motor DC Servo.
b. Dapat mengamati tanggapan/keluaran plant DC Servo dengan menggunakan
pengontrolan proporsional untuk nilai Kp yang berbeda.
c. Dapat mengamati tanggapan/keluaran sistem dengan menggunakan pengontrolan
Proporsional + Integral (PI).
d. Dapat mengamati tanggapan/keluaran sistem dengan menggunakan pengontrolan
Proporsional + Integral + Diferensial (PID).
3.2 Peralatan yang Digunakan
a. Power Supply 15 V/3 A
b. Servo Setpoint Potentiometer
c. PID Kontroler
d. Power Amplifier
e. Plant DC Servo
f. Plotter
g. Multimeter
3.3 Dasar Teori
3.3.1 Motor DC
Motor DC tersusun atas dua bagian, disebut sebagai bagian jangkar dan bagian medan.
Kedua bagian ini dieksitasi secara terpisah sedemikian rupa sehingga medan yang dihasilkan
setiap saat saling berlawanan. Adanya medan yang berlawanan antara jangkar dan medan inilah
yang menyebabkan munculnya torsi pada rotor, sehingga motor berputar.
Gambar 3.1. Motor DC Medan Tetap dengan Pengendalian Jangkar
Ditinjau dari cara pengendaliannya, motor DC dibedakan menjadi 2 tipe, yaitu motor DC
medan tetap (arus medan konstan atau medan dengan magnet permanen) dengan pengendalian
jangkar atau motor DC arus jangkar tetap dengan pengendalian medan.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
42
Arus Ia(t) adalah arus jangkar yaitu arus yang melalui La (induktansi jangkar) dan Ra
(resistansi jangkar) yang muncul karena adanya tegangan catu Ea(t) pada rangkaian tertutup dari
kumparan jangkar. Sedangkan Eg(t) adalah tegangan GGL lawan, yang muncul karena adanya
perubahan fluksi pada kumparan jangkar akibat dari berputarnya kumparan jangkar dalam
medan. Hubungan antara Ea(t), Ia(t) dan Eg(t), dituliskan sebagai :
)()()(
)()( tEtIRdt
tdItLtE gaa
aaa (3-1)
dalam bentuk transformasi Laplace, persamaan (1) dapat pula ditulis sebagai :
)()()()( sIRsLsEsE aaaga (3-2)
sehingga fungsi alih dari rangkaian kumparan jangkar ini adalah :
aa
ga
aRsL
sEsEsI
)(
)()()( (3-3)
Medan magnet yang dihasilkan oleh medan menyebabkan munculnya fluksi celah udara yang
besarnya konstan, yaitu :
AB (3-4)
di mana, B=kuat medan dan A=luas penampang kumparan medan. Untuk medan berupa
kumparan dengan arus If, kuat medan B dituliskan sebagai :
L
inB
fff
2 (3-5)
dengan
nf = jumlah kumparan medan
f = permeabilitas bahan inti
If = arus medan
L = tebal kumparan medan
Akibat adanya arus pada kumparan jangkar yang berada dalam medan (fluksi celah
udara), akan membangkitkan torsi pada kumparan jangkar yang selanjutnya menyebabkan
berputarnya rotor. Torsi yang dihasilkan oleh kumparan jangkar berbanding lurus dengan hasil
kali arus jangkar dengan fluksi, yaitu :
aik atau amiK (3-6)
di mana Km disebut sebagai konstanta torsi motor.
Dalam bentuk transformasi Laplace dapat dituliskan sebagai :
)()( sIKsT am (3-7)

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
43
Pada saat jangkar berputar, terjadi perubahan fluksi pada kumparan jangkar yang
menyebabkan terinduksinya tegangan pada kumparan jangkar. Tegangan induksi ini disebut
sebagai tegangan ggl (gaya gerak listrik) yang besarnya berbanding lurus dengan perkalian fluksi
dan kecepatan sudut putaran rotor, yaitu :
2kEg atau dt
dKE gg
(3-8)
di mana, Kg = konstanta ggl, = kecepatan sudut dan = simpangan.
Dalam bentuk transformasi Laplace adalah :
)()( sKsE gg
atau
)(.)( ssKsE gg (3-9)
Torsi yang dihasilkan motor, dipakai untuk menggerakkan beban dengan momen inersia
J dan koefisien viskos f yang hubungannya adalah :
dt
df
dt
dJ
2
(3-10)
dalam bentuk transformasi Laplace dapat pula dituliskan sebagai :
)()()( 2 sfsJssT atau )(
)()(
fJss
sTs
(3-11)
3.3.2 Sistem Pengaturan Posisi dengan Motor DC
Sistem pengaturan posisi dengan menggunakan motor DC merupakan sistem pengaturan
loop tertutup yang terdiri dari bagian-bagian sebagai berikut : kontroler, amplifier atau penguat
dan potensiometer yang ditambahkan pada komponen motor DC tersebut. Desain pengaturan
posisi tersebut dapat dilihat pada gambar berikut :
Gambar 3.2 Diagram Fisik Sistem Servomekanis untuk Pengaturan Posisi

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
44
3.3.3 Model Matematik Sistem Pengaturan Posisi
Model matematik dari sistem pengaturan posisi dapat diturunkan dengan analisa terpisah
melalui hubungan input/output pada tiap komponen, dengan mengaitkan variabel-variabel yang
menghubungkan antar komponen dalam sistem, akan didapat model matematik sistem total
3.3.3.1 Model Matematik dari Potensiometer Input dan Output
Sinyal referensi yang dimasukkan ke potensiometer input, adalah posisi (simpangan)
sudut , sedangkan keluaran potensiometer yang diumpankan ke sisi positif dari masukan
kontroler adalah tegangan Uw. Dalam bentuk transformasi Laplace, hubungan antara dan Uw
dapat dituliskan sebagai :
)()( . sKsU potw (3-12)
di mana Kpot adalah konstanta potensiometer.
Demikian pula untuk potensiometer output, simpangan sudut menyatakan besarnya
simpangan sudut pada beban. Keluaran dari potensiometer output ini berupa tegangan Ux yang
diumpan balikkan ke sisi negatif dari masukan kontroler. Hubungan antara dan Ux dapat
dituliskan sebagai :
)()( . sKsU potx (3-13)
3.3.3.2 Model Matematik Kontroler
Kontroler adalah komponen yang berfungsi mentransformasikan sinyal error menjadi
sinyal kontrol, dibedakan atas beberapa tipe, antara lain : kontroler tipe P (Proporsional),
kontroler tipe PI (Proporsional + Integral), kontroler tipe PD (Proporsional + Derivatif) dan
kontroler PID (Proporsional + Integral + Derivatif).
a. Kontroler Tipe P (Proporsional)
Kontroler proporsional adalah suatu kontroler yang mentransformasikan sinyal error e(t)
= Uw(t) - Ux(t) menjadi sinyal kontrol Uc(t) secara proporsional. Dengan kata lain kontroler ini
hanya berupa sebuah gain yang disebut sebagai koefisien proporsional Kp. Dengan memakai
transformasi Laplace, hubungan antara Uc(t) dinyatakan sebagai :
)()( sEKsU pc (3-14)
b. Kontroler Tipe PI (Proporsional + Integral)
Kontroler tipe PI adalah suatu kontroler yang mentransformasikan sinyal kesalahan e(t) =
Uw(t) - Ux(t) menjadi sinyal kontrol Uc(t) secara proporsional dan integral. Aksi kontrol integral
ini untuk menghilangkan off-set yang biasanya muncul pada kontroler proporsional.
Dalam bentuk fungsi Laplace, hubungan antara Uc(s) dan E(s) dari kontroler ini dapat dituliskan
sebagai :
)()1
1()( sEsT
KsUn
pc (3-15)

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
45
c. Kontroler Tipe PD (Proporsional + Derivatif)
Kontroler tipe PD adalah suatu kontroler yang mentransformasikan sinyal kesalahan e(t)
= Ux(t) - Ux(t) menjadi sinyal kontrol Uc(t) secara proporsional dan derivatif. Aksi kontrol
diferensial ini berguna untuk mempercepat respons sistem, khususnya untuk sistem yang
mempunyai komponen tipe integral. Dalam bentuk fungsi Laplace, hubungan antara Uc(t) dan
E(s) dari kontroler ini dapat dituliskan sebagai :
)()1()( sEsTKsU vpc (3-16)
d. Kontroler Tipe PID (Proporsional + Integral + Derivatif)
Kontroler tipe PID adalah suatu kontroler yang mentransformasikan sinyal kesalahan e(t)
= Uw(t) - Ux(t) menjadi sinyal kontrol Uc(t) secara proporsional, integral dan diferensial. Aksi
kontrol yang dihasilkan dari kontroler ini melengkapi semua kekurangan yang ada pada tiga tipe
sebelumnya. Dalam bentuk fungsi Laplace, hubungan antara Uc(s) dan E(s) dari kontroler ini
dapat dituliskan sebagai :
)()1
1()( sEsTsT
KsU v
n
pc (3-17)
3.3.3.3 Model Matematik dari Komponen Amplifier
Sinyal kontrol yang dihasilkan oleh kontroler memiliki tegangan, arus dan daya yang
kecil. Karena itu diperlukan komponen amplifier untuk menguatkannya agar dapat digunakan
untuk menggerakkan motor DC. Dalam bentuk transformasi Laplace hubungan antara masukan
Uc dan keluaran Ea dapat dituliskan sebagai berikut :
caa UKE (3-18)
3.3.3.4 Model Matematik Komponen Motor DC, Roda Gigi dan Beban
Pada sistem pengaturan posisi motor DC difungsikan sebagai penggerak sistem posisi
yang tersusun atas roda gigi dan beban. Hubungan antara tegangan jangkar Ea, arus jangkar Ia,
tegangan Eg dan torsi motor T dapat dituliskan pada persamaan berikut :
aa
ga
aRsL
sEsEsI
)()()( (3-19)
)()( sIKsT am (3-20)
)()( sKsE gg atau )(.)( ssKsE gg (3-21)
Torsi motor T, simpangan poros motor dan kecepatan sudut poros motor
ditransmisikan melalui sistem roda gigi ke beban (momen inersia J dan redaman viskos f)
menjadi torsi beban Tb, simpangan poros beban dan kecepatan sudut poros beban . Jika

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
46
perbandingan roda gigi Nn
n
2
1 , maka hubungan dari variabel-variabel tersebut dapat dituliskan
sebagai NTTb
N atau N
1 (3-22)
Torsi pada beban digunakan untuk menggerakkan beban yang mempunyai momen
inersia J dan viskos damping f ( dalam hal ini, dianggap bahwa momen inesia dan viskos
damping dari rotor motor DC dan roda gigi sudah ditransformasikan dan digabung ke beban)
Hubungan antara torsi beban Tb dan simpangan poros beban dapat diturunkan pada persamaan
berikut:
)()( 2 sfsJsTb atau )(
)()(
fJss
sTs b
(3-23)
atau dalam bentuk sudut poros beban , yaitu :
)()()( sfJssTb atau )(
)()(
Jsfs
sTs b (3-24)
3.3.3.5 Diagram Blok Sistem Pengaturan Posisi dengan Motor DC
Model matematis dari sistem servomekanis pengaturan posisi dengan motor DC dapat pula dinyatakan dengan diagram blok yang tersusun atas diagram tiap komponen penyusun sistem. Dengan memilih kontroler tipe PID, lalu menggabungkannya ke input atau output dari
komponen sesuai dengan kesamaan variabelnya, akan didapatkan diagram blok total sistem
seperti gambar berikut :
Gambar 3.3 Diagram Blok Sistem Pengendalian Motor DC Servo

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
47
Gambar 3.4 Rangkaian Percobaan Penggunaan Kontroler PID pada Motor DC Servo
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
48
3.4 Percobaan
3.4.1 Kontroler Proporsional
3.4.1.1 Prosedur Percobaan:
a. Rangkaikan modul praktikum seperti pada Gambar 3.4.
b. Atur modul setpoint potensiometer sehingga mengeluarakan tegangan UW = 5 volt
dengan memutar potensiometer dan diukur dengan multimeter.
c. Atur nilai Kp seperti pada tabel 1.1, I off, D off. Catat nilai keluaran sudut simpangan
beban dan tegangan keluaran UX dengan multimeter pada Tabel 3.1
3.4.1.2 Tabel Percobaan
Tabel 3.1. Penggunaan Kontroler Proposional pada Motor DC Servo
Kp 1x1 2x1 5x1 10x1 10x1
0* 10x100
**
β(o)
Ux(V)
* terjadi osilasi kecil
** terjadi osilasi besar
Prosedur menggambar keluaran plant dengan plotter
Atur pada kontroler Kp, TN, TV sesuai tabel pada masing-masing percobaan
Atur pada plotter atau oscilloscope sebagai berikut :
Y = 1 V/cm ; DC
T = 2 s/cm
Tr = ext (+) AC pada Uw = 0 –5 V untuk oscilloscope
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
49
3.4.1.3 Data Analisis Grafik
Tabel 3.2 Data Analisis Grafik Penggunaan Kontroler P
Kp ts (s) Mp (%)
1x1
5x1
10x100
3.4.1.4 Grafik Percobaan
Gambar 3.5 Respons Plant dengan Kontroler P dan Nilai Kp yang Berbeda-beda
3.4.1.5 Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
50
3.4.2 Kontroler Proporsional dan Integral
3.4.2.1 Membandingkan Penggunaan Kontroler P dan PI
3.4.2.1.1 Data Analisis Grafik
Tabel 3.3 Data Analisis Grafik Penggunaan Kontroler P dan PI
Kp ts(s) Mp (%)
Kp = 5x1
Kp = 5x1 TN= 0.5
3.4.2.1.2 Grafik Percobaan
Gambar 3.6 Responss Plant dengan Kontroler P dan PI
3.4.2.1.3 Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
51
3.4.2.2 Pengaruh Perubahan Kp pada Kontroler PI
3.4.2.2.1 Data Analisis Grafik
Tabel 3.4 Data Pengaruh Perubahan Kp pada Kontroler PI
Kp dan TN ts(s) Mp (%)
Kp = 1 TN= 0.5
Kp = 100 TN= 0.5
3.4.2.2.2 Grafik Percobaan
Gambar 3.7 Respons Plant dengan Kontroler PI dan Nilai Kp yang Berbeda-beda
3.4.2.2.3 Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
52
3.4.3 Kontroler Proporsional Integral Diferensial
3.4.3.1 Data Analisis Grafik
Tabel 3.5 Data Analisis Grafik Penggunaan Kontroler PID
Kp, TN, dan TV ts (s) Mp (%)
Kp = 100; TN = 0,5; TV = 0.02
Kp = 100; TN = 0,5; TV = 0.05
Kp = 100; TN = 0,5; TV = 0.1
3.4.3.2 Grafik Percobaan
Gambar 3.8 Respons Plant dengan Kontroler PID dan Nilai Tv yang Berbeda-beda
3.4.3.3 Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
53
3.5 Analisis Data
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
54
3.6 Tugas
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
PRAKTIKUM
SISTEM KONTROL
PERCOBAAN IV
SISTEM PENGATURAN TEMPERATUR DENGAN
KONTROLER PROPORSIONAL
ASISTEN PERCOBAAN : ...................................................................................
NIM : ...................................................................................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
55
PERCOBAAN 4
SISTEM PENGATURAN TEMPERATUR DENGAN
KONTROLER PROPOSIONAL
4.1 Tujuan
Setelah melaksanakan sistem pengaturan temperatur dengan kontroler proposional,
diharapkan praktikan dapat mengamati karakteristik sistem pengaturan temperatur dengan
kontroler proposional untuk menentukan titik kerja.
4.2 Peralatan yang Digunakan
a. Power Supply 15 V/3 A
b. Setpoint Potensiometer
c. PID Kontroler
d. Power Amplifier
e. Plant Temperature
f. Plotter
g. Multimeter
h. Connecting lead
4.3 Dasar Teori
Komponen yang diatur untuk modul ini terdiri dari kipas angin dan pemanas (lampu
halogen 12 Volt) yang diletakkan pada sebuah lorong sempit. Di sebelah pemanas terdapat
sensor temperatur (PTC) yang bertujuan untuk mengukur udara panas yang mengalir pada
lorong sempit. Kipas angin (ventilator angin) yang diletakkan pada lorong muka bertujuan untuk
menyedot udara dari luar. Kipas angin ini dioperasikan dengan kecepatan konstan. Pada lorong
ujung akhir dipasang sebuah penyekat yang dapat diatur posisi kemiringannya. Dengan
mengatur sudut kemiringan penyekat tersebut aliran udara panas yang keluar dapat diperbesar
maupun diperkecil. Tabung ini dilengkapi dengan tombol potensiometer untuk mempercepat
putaran ventilator-motor dan tombol jendela untuk mengatur bukaan prosentase campuran udara
sekitar dengan udara di dalam tabung. Gambar 1 menunjukkan skema diagram komponen yang
diatur modul pengaturan temperatur udara.
Gambar 4.1. Komponen Plant Temperatur
Untuk memperoleh nilai temperatur kamar, kipas angin diputar maksimal, sehingga
pemanas menjadi lebih dingin. Sensor temperatur diukur tegangan keluarannya. Pada plant ini
V
T pngin Sensor Temperatur
Pemanas
Pintu Pengatur
Udara Keluar Kipas Angin
Pemanas
Sensor Temperatur

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
56
diperoleh temperatur kamar pada sekitar 3 s/d 3,3 Volt. Proses berikutnya adalah mendapatkan
respons waktu unit step untuk plant ini.
Ketika kipas penyedot udara berputar, pemanas pada t=0 dinyalakan. Artinya tegangan
masukan ke amplifier pemanas dinyalakan, sehingga sinyal masukan seolah berbentuk step.
Pada selang waktu pertama, sensor temperatur tidak bereaksi, karena terdapat jarak antara
pemanas dengan sensor, sehingga udara panas yang dihasilkan dari kipas angin membutuhkan
waktu untuk mencapai sensor. Selang waktu ini dinamakan sebagai waktu tunda. Setelah selang
waktu TL , sensor perlahan menunjukkan kenaikan temperatur kontinyu serta dalam selang waktu
tertentu mencapai kondisi mantap - mencapai nilai akhir.
M
I,U
C10
mA2o
C10
V1o
0 V
-15 V
+15 V
(+5 V)
1 543 2
98
7
6
Gambar 4.2 Plant Sistem Pengaturan Temperatur
Kecepatan perubahan kenaikan dari temperatur yang terukur sangat tergantung pada
penyetelan panas keluar pada pintu keluaran dan kecepatan kipas angin. Pada plant ini, kipas
angin dibuat berputar konstan. Hal ini bertujuan agar analisis sistem tidaklah rumit, salah satu
penggerak dibuat konstan sedangkan penggerak lainnnya yang diatur. Nilai tipikal dari konstanta
waktu plant temperatur adalah dalam orde menit atau bahkan jam, tergantung seberapa besar
ruangan yang seharusnya dipanasi. Dengan kipas angin disetel pada kecepatan skala dua dan
penghalang pintu keluar disetel juga pada skala 2, hasil eksperimen menunjukkan pada selang
waktu 2 detik, respons tidak bereaksi naik, sehingga nilai TL 2 detik. Gambar 4.3
mennggambarkan respons masukan dan sinyal keluarannya.
0 100 200 300 400 5000
5
10
15
20
25
Respon step plan
Waktu- Detik
Gambar 4.3 Sinyal Masukan dan Keluaran Plant

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
57
Berdasarkan gambar 4.3 perilaku plant dapat didekati sebagai komponen PT1 (elemen
proporsional plus elemen perlambatan orde satu) yang diseri dengan elemen tunda. Persaman
matematik dalam s untuk karakteristik semacam ini adalah:
FV
T seS
s
e
T sL
1. (4-1)
Parameter waktu TL merupakan waktu tunda sebelum respons bereaksi terhadap
perubahan masukan plant. Sedangkan parameter waktu Te menunjukkan konstanta waktu dari
respons waktu. Dari eksperimen diperoleh nilai TL 2 detik dan Te 60 detik.
Plant semacam ini sangat sulit untuk diatur, jika perbandingan parameter T TL e semakin
besar. Konstanta waktu perlambatan dari plant temperatur umumnya sangat lama. Tipikalnya
bernilai antara orde menit dan jam. Dikarenakan sifat lamban plant ini dan secara kenyataan
manusia sangat sulit untuk membedakan perbedaan temperatur yang kecil, maka pengaturan
temperatur ini masih layak jika diterapkan pengatur tak linear dua kondisi (yaitu hanyalah
sebuah saklar listrik atau elektronik yang hanya memiliki dua nilai: ‘on’ atau ‘off’)
terhadapnya. Namun pada percobaan ini akan diperkenalkan penggunaan kontroler klasik PID
pada plant pengaturan temperatur..
Kontroler berfungsi untuk membandingkan nilai yang sebenarnya dari keluaran plant
dengan nilai yang diinginkan , menentukan deviasi, dan menghasilkan suatu sinyal kontrol yang
akan memperkecil deviasi sampai dengan nol atau sampai nilai yang terkecil. Cara kontroler
menghasilkan sinyal kontrol disebut aksi pengontrolan. Dalam percobaan ini dibahas jenis
kontroler PID (Proporsional Integral Diferensial). Pengertian kontroler PID adalah kontroler
yang dalam aksi pengontrolannya merupakan gabungan dari kontroler proporsional (P), integral
(I), dan diferensial (D).
Hubungan antara keluaran kontroler m(t) dan sinyal error e(t) dari kontroler proporsional
adalah :
y(t) = Kp e(t) (4-2)
atau dalam transformasi Laplace :
Y (s) / E (s) = Kp (4-3)
di mana Kp adalah Gain (penguatan proporsional).
Pada kontroler integral, nilai keluaran kontroler y(t) diubah dengan laju yang sebanding
dengan sinyal error e(t), sehingga :
dy(t) / dt = Ki e(t) (4-4)
atau
y(t) = Ki e(t) dt (4-5)
Dalam transformasi Laplace dapat dinyatakan :
Y(s) / E(s) = Ki /s (4-6)
di mana Ki = Kp / Ti
Hubungan sinyal kontroler m(t) dengan sinyal error e(t) dari kontroler Diferensial dapat
dinyatakan oleh :
y(t) = Kd de(t)/dt (4-7)
atau dalam transformasi Laplace dinyatakan :
Y(s) / E(s) = Kd s (4-8)
di mana Kd = Kp Td
Gabungan aksi kontrol proporsional, integral, dan diferensial mempunyai keunggulan
dibandingkan dengan masing-masing dari tiga aksi kontrol tersebut. Persamaan kontroler ini
dapat dinyatakan sebagai berikut :
y(t) = Kp e(t) + Kp / Ti e(t) dt + Kp Td e(t) dt (4-9)

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
58
atau dalam transformasi Laplace dinyatakan oleh :
Y(s) / E(s) = Kp ( 1 + 1/Ti s + Td s ) (4-10)
Pada sistem pengaturan loop tertutup dibutuhkan pemilihan kerja (nilai parameter-
parameter : TG , Tu , dan Ks ) agar kontroler dapat mengatasi perubahan-perubahan input atau
gangguan-gangguan yang mungkin timbul. Sebagai contoh proses permbuatan baja pada tungku
pemanas membutuhkan penentuan parameter-parameter yang tepat agar dihasilkan baja dengan
kualitas yang diinginkan.
Biasanya penentuan parameter-parameter kontroler 50% dari daerah kerjanya.
Pertanyaan berikut yang muncul adalah berapa luas daerah kerja agar bisa menentukan nilai 50%
dari lebar gangguan supaya sistem tetap andal dan mempunyai nilai ekonomis.
Dalam percobaan ini ditunjukkan salah satu metode untuk memecahkan persoalan di atas
dengan metode tangen.
Gambar 4.4. Respons Percobaan Untuk Input Step
Hasil respons dari percobaan tersebut dengan input unit step dapat dinyatakan dengan grafik
di atas.

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
59
Gambar 4.5 Rangkaian Percobaan Sistem pengaturan Temperatur dengan kontroler proporsional

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
60
4.4 Percobaan
Berikut ini prosedur percobaan yang harus diikuti :
1. Buatlah rangkaian percobaan untuk sistem pengaturan temperatur dengan kontroler PID
(akan dijelaskan oleh asisten).
2. Kalibrasikan kontroler : Kp = 0,1 x 10 , dan TN , TV off.
3. Kalibrasikan setpoint sebagai berikut : Uw = +6 volt.
4. Kalibrasikan Plant : Ventilator motor = 2 skala , Flapper = 2 skala, dan output=1
V/10C.
5. Kalibrasikan recorder sebagai berikut : Y = 10 V/div, T = 2 cm/min, Y1 = output plant,
dan Y2 = output kontroler.
6. Periksa bahwa saklar setpoint pada Vref dan atau saklar rekorder off.
7. Tunjukkan pada assisten apakah rangkaian yang anda buat telah benar.
8. Bila sudah nyalakan power.
9. Nyalakan saklar rekorder.
10. Beberapa saat kemudian start saklar setpoint.
11. Amati hasil respons pada rekorder !
12. Ulangi langkah 3 untuk Uw = +7,5 V, amati rekorder.
13. Ulangi langkah 3 untuk Uw = +9 V, amati rekorder.
14. Ulangi langkah 3 untuk Uw = +10 V, amati rekorder.
15. Dengan menggunakan metoda tangen, hitunglah nilai-nilai TG, TU, TG/TU dan C untuk
keempat nilai Uw, dengan menggunakan rumus : Ks = x/y () = Ux/Uy = U/Uw , di
mana U adalah tegangan keluaran dari plant dengan konverter 1V/10C dan Uw = Uy,
karena Kp = 1.
16. Lengkapi tabel di bawah dari hasil perhitungan di atas !
17. Berapa titik kerja dari percobaan di atas ?
18. Berapa setpoint yang harus diberikan ?
Catatan : Untuk diperhatikan bahwa setiap akan melakukan pengukuran hendaknya
dilakukan “cooling down” , yaitu proses penurunan temperatur di dalam tabung agar sama
atau lebih kecil dengan temperatur ruangan (lingkungan).

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
61
4.5 Hasil Percobaan
4.5.1 Tabel Percobaan
Tabel 4.1 Data Percobaan
Suhu referensi = (C)
Uw=Uy (C) TG/s Tu/s TG/Tu K=Ux/Uy Ux(V) Error
6 V
7.5 V
9 V
10 V
4.5.2 Kesimpulan
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
62
4.6 Grafik
4.6.1 Grafik Keluaran Plant
Gambar 4.5 Grafik Keluaran Plant
4.6.2 Grafik Keluaran Kontroler
Gambar 4.6 Grafik Keluaran Kontroler

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
63
4.7 Analisis Data
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................
...........................................................................................................................................................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
PRAKTIKUM
SISTEM KONTROL
PERCOBAAN V
SISTEM PENGATURAN KETINGGIAN AIR TANGKI
ASISTEN PERCOBAAN : ...................................................................................
NIM : ...................................................................................

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
64
PERCOBAAN 5
SISTEM PENGATURAN KETINGGIAN AIR TANGKI
5.1 Tujuan
Setelah melaksanakan percobaan sistem pengaturan ketinggian air tangki praktikan
diharapkan dapat mengerti tentang karakteristik tangki yang berisi air sebagai satu kesatuan
komponen yang diatur (plant). Percobaan ini menggambarkan karakteristik statis maupun
dinamis sistem pengaturan ketinggian tangki air. Pengaruh pemasangan jenis-jenis kontroler
akan diamati juga. Sehingga praktikan akan memperoleh bekal pengetahuan tentang pengaruh
kontroler terhadap karakteristik transien dan deviasi keadaan mantap sistem pengaturan loop
tertutup.
5.2 Peralatan yang Digunakan
a. Power Supply 15 V/3 A
b. Setpoint Potensiometer
c. PID Kontroler
d. Power Amplifier
e. Plant Tangki Air
f. Plotter
g. Multimeters
5.3 Dasar Teori
5.3.1 Plant Tangki Air
Secara umum plant diklasifikasikan ke dalam dua kategori, plant yang stabil dan plant
tak stabil. Klasifikasi stabil biasanya dikelompokkan sebagai plant proporsional (plant-P) dan
yang tak stabil dimasukkan ke dalam plant integral (plant-I).
Plant tangki sebagai komponen yang diatur dapat disusun ke dalam bentuk plant
proporsional atau berfungsi sebagai plant integral. Susunan ini dapat dibuat dengan mengubah-
ubah keadaan aliran air keluar dari tangki. Gambar 5.1 menunjukkan tangki yang berfungsi
sebagai plant proporsional. Ciri utama tangki dengan susunan semacam ini adalah terbukanya
katub keluaran tangki. Akibatnya air yang berada di dalam tangki akan bebas keluar tanpa
halangan.
Dari gambar 5.1 terlihat jelas, bahwa keadaan mantap ketinggian air tangki akan dicapai
ketika kecepatan aliran masuk sama dengan kecepatan aliran air keluar. Kalau aliran air pertama
kali masuk ke dalam tangki yang kosong, ketinggian air dalam tangki akan naik terus, dan
mengakibatkan secara langsung naiknya kecepatan aliran air keluar. Keadaan demikian akan
terus berubah sampai dicapai tangki mempunyai ketinggian tertentu yang dinamakan sebagai
keadaan mantap. Persamaan matematis untuk susunan ini adalah:
dt
dVoutQinQ (5.1)

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
65
dengan:
Qin : Kecepatan aliran air masuk
Qout : Kecepatan aliran air keluar
V : Volume air dalam tangki
Jika katub keluaran tangki disumbat sepenuhnya, plant tangki ini berfungsi sebagai
integrator (penampung) air. Sepanjang aliran kecepatan air masuk Qin 0, ketinggian air dalam
tangki tidak mengalami perubahan. Setelah kecepatan aliran air masuk baik secara kontinyu
maupun tak kontinyu, ketinggian air dalam tangki akan naik secara linier. Kecepatan kenaikan
ketinggian air ini sangat dipengaruhi oleh volume tangki dan kecepatan aliran air masuk.
Gambar 5.2 menunjukkan tangki sebagai plant integrator.
Gambar 5.1 Konstruksi Tangki Sebagai Plant Proporsional
Gambar 5.2 Konstruksi Tangki Sebagai Plant Integrator
Secara matematis karakteristik semacam itu mencerminkan bahwa ketinggian air pada
tangki merupakan sebuah proses integral terhadap kecepatan aliran air masuk. Rumusan
hubungan antara ketinggian dengan kecepatan aliran air masuk adalah:
dt
dhAinQ . (5.2)
dtin
QA
h .1
(5.3)
5.3.2 Konsep Penyusunan Karakteristik Komponen
Karakteristik komponen dapat diklasifikasikan ke dalam dua bentuk kurva, kurva statis
dan dinamis. Tujuan sederhana penyusunan karakteristik ini agar dapat meramalkan kejadian
QIN
QOUT

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
66
keluaran suatu komponen ketika dikenai sebuah masukan atau dapat diperkirakan perilaku
perubahan keluaran terhadap waktu.
5.3.2.1 Karakteristik Statis
Penyusunan karakteristik statis komponen didasarkan pada keadaan masukan maupun
keluaran ketika berada dalam keadaan mantap (steady state). Nilai masukan komponen
ditetapkan pada nilai tertentu dan besaran keluaran dicatat ketika mencapai keadaan mantapnya.
Contoh karakteristik statis plant tangki ditunjukkan oleh gambar 5.3 dan gambar 5.4.
Gambar 5.3 Kurva Karakteristik Statis Gain Pompa
Gambar 5.4 Kurva Karakteristik Statis Gain Keadaan Mantap
Karakteristik statis plant tangki merupakan kurva yang menyatakan hubungan antara
masukan dan keluaran plant. Plant tangki ini memiliki masukan berupa besaran fisik aliran
masuk air in
Q dan besaran keluarannya adalah ketinggian tangki. Oleh karena itu hubungan
karakteristik statis plant fungsi h = f (in
Q ). Pada karakteristik statis diperlukan proses
linierisasi untuk memperoleh karakteristik komponen tersebut.
5.3.2.2 Karakteristik Dinamis
Penyusunan karakteristik dinamis sebuah sistem pengaturan atau sebuah komponen
dilakukan dengan memberikan masukan dari komponen itu dengan sebuah fungsi waktu, dan
keluarannya direkam atau ditabelkan. Sinyal masukan yang digunakan umumnya berupa sinyal
sinus, ramp atau step. Ciri karakteristik dinamis ini adalah koordinat absisnya selalu berupa
h (%)
U (%)
U
h

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
67
waktu, yaitu X t X tin out( ); ( ). Contoh karakteristik dinamis untuk sistem proporsional dan sistem
integral dengan keterangan parameter-parameternya ditunjukkan oleh gambar 5.5.
Gambar 5.5 Kurva Karakteristik Dinamis
5.4 Percobaan
5.4.1 Karakteristik Statis
Plant tangki pada percobaan ini dilengkapi dengan dua buah lubang yang salah satu
berfungsi sebagai masukan aliran air dan yang lainnya untuk keluarnya air. Di dalam tangki itu
sendiri disediakan beberapa tempat untuk menyelipkan lima buah slide. Dengan slide ini akan
dimungkinkan alternatif bentuk perilaku plant. Gambar 5.6 berikut merupakan diagram skematik
komponen tangki. Sedangkan gambar 5.7 menunjukkan lima buah slide yang tersedia.
(a) (b)
Gambar 5.6. (a) Diagram Skematik Komponen Tangki (b) Slide
Di samping tangki air, terdapat pompa yang bertugas untuk menarik air dan
menyalurkannya ke dalam tangki. Pompa secara umum dapat diklasifikasikan berdasarkan
mekanisma penggeraknya, misalnya pompa gear, pompa propeller dan pompa piston. Pemilihan
tipe aplikasi pompa tergantung terhadap kebutuhan selama pemakaiannya. Beberapa kriteria
dalam pemilihan pompa adalah sebagai berikut:
a. Lingkup tekanan yang dibutuhkan
b. Kecepatan aliran keluaran
c. Fleksibilitas
d. Tingkat derau selama berputar
e. Volume pompa
f. Instruksi penyusunannya
g. Nilai

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
68
5.4.1.1 Prosedur Percobaan
Untuk mendapatkan karakteristik statis gain pompa, lakukan urutan proses berikut dan
kemudian lengkapilah tabel percobaan yang tertera pada bagian berikutnya:
a. Susunlah peralatan percobaan sesuai instruksi asisten laboratorium.
b. Masukkan slide 0 pada posisi 1 dan 5, untuk mendapatkan volume tangki sebesar x L.
c. Catat waktu yang diperlukan pada setiap posisi pompa dari 1 sampai 10.
d. Lengkapi tabel 5.1
Perhitungan kecepatan pompa mengalirkan air dapat dihitung dengan rumus berikut :
detik)(
1.3600. x )/(
t
hLhLVX a (5.4)
Dari hasil pengukuran di atas, buatlah kurva yang menyatakan hubungan antara posisi
pompa dengan kecepatan pompa mengalirkan air. Kurva tersebut tak linier. Karakteristik statis
pompa diperoleh dengan mengambil sebagian kurva linier dan menghitung perbandingan antara
keluaran pompa dengan posisi pompa menggunakan rumus berikut:
e
a
pX
XK
(5.5)
5.4.2 Karakteristik Dinamis
Karakteristik dinamis plant menggambarkan dinamika besaran keluaran plant terhadap
waktu apabila besaran masukan berubah dengan pola yang sudah diketahui perilakunya. Secara
eksperimen, kedua karakteristik tersebut dapat diperoleh melalui langkah-langkah eksperimen
berikut:
5.4.1.1 Karakteristik Dinamis Plant Tangki Proporsional
5.4.2.1.1 Prosedur Percobaan
Catat respons step dengan menyusun modul praktikum berikut:
a. Slide 2 pada posisi 5 dan slide 0 pada posisi 1.
b. Nyalakan masukan step dengan meletakkan posisi pompa pada 2
5.4.1.2 Karakteristik Dinamis Plant Tangki Integral
5.4.2.2.1 Prosedur Percobaan
Catat respons step dengan menyusun modul praktikum berikut:
a. Slide 0 pada posisi 1 dan 5
b. Nyalakan masukan step dengan meletakkan posisi pompa pada 2
5.4.1.3 Karakteristik Dinamis Plant Tangki dengan Kontroler Proporsional
5.4.1.3.1 Prosedur Percobaan
Eksperimen ini bertujuan untuk mendapatkan karakteristik sistem pengaturan ketinggian
air dengan menggunakan kontroler P terhadap perubahan masukan dan adanya gangguan.
Lakukanlah langkah-langkah percobaan berikut ini.
a. Susun modul plant tangki sebagai plant PT1, yaitu dengan menempatkan slide 0 pada
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
69
posisi 1 dan slide 2 pada posisi 5, dan slide 1 pada posisi 4. Gain pompa = 10
b. Tetapkan nilai konstanta kontroler pada nilai Kp = 5 nilai masukan awal sebesar 50%.
c. Ubah nilai setpoint 50% ke 75% pada saat sudah mencapai keadaan mantap. Kemudian
ubah kembali nilai masukan dari 75% ke 50%. Amati respons ketinggian tangki dengan
menggunakan plotter, setting skala vertikal sebesar 1 V/cm dan skala kecepatan sebesar
10 det/cm.
d. Karakteristik terhadap adanya gangguan didapatkan dengan cara membuka/mengangkat
slide 1 pada posisi 4 kemudian kembalikan lagi slide tersebut setelah beberapa saat.
e. Lakukanlah kembali langkah ke-1 hingga ke-4 dengan mengganti Kp = 20
5.4.1.4 Karakteristik Dinamis Plant Tangki dengan Kontroler Proporsional Integral
5.4.1.4.1 Prosedur Percobaan
Eksperimen ini bertujuan untuk mendapatkan karakteristik sistem pengaturan ketinggian
air dengan menggunakan kontroler PI terhadap perubahan masukan dan adanya gangguan.
Lakukanlah langkah-langkah percobaan berikut ini.
a. Susun modul plant tangki sebagai plant PT1, yaitu dengan menempatkan slide 0 pada
posisi 1, slide 1 pada posisi 4 dan slide 2 pada posisi 5. Gain pompa = 10.
b. Tetapkan konstanta kontroler pada nilai Kp = 5,TN = 0,1 dan masukan awal 50%.
c. Ubah nilai setpoint 50% ke 75% pada saat sudah mencapai keadaan mantap. Kemudian
ubah kembali nilai masukan dari 75% ke 50%. Amati respons ketinggian tangki dengan
menggunakan plotter, setting skala vertikal sebesar 1 V/cm dan skala kecepatan sebesar
10 det/cm.
d. Karakteristik terhadap adanya gangguan didapatkan dengan cara membuka/mengangkat
slide 1 pada posisi 4 kemudian kembalikan lagi slide tersebut setelah beberapa saat.
e. Lakukanlah kembali langkah ke-1 hingga ke-4 dengan mengganti Kp = 20
5.5 Tabel Data dan Kesimpulan
5.5.1 Tabel Percobaan
Tabel 5.1 Data Hasil Percobaan Perubahan Posisi Pompa
Gain Pompa 1 2 3 4 5 6 7 8 9 10
Pengukuran ke 1
(detik )
Pengukuran ke 2
(detik )
Rata-rata (detik )
V(L/h)

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
70
Tabel 5.2 Data Hasil Percobaan Plant Tangki PT1 dengan Kontroler Proporsional
Setting
Kontroler Kp=5 Kp=10 Kp=20
Nilai masukan h
V
Δh
V
h
V
Δh
V
h
V
Δh
V
25%
50%
75%
Tabel 5.3 Data Percobaan Plant Tangki PT1 dengan Kontroler Proposional Integral
Setting
Kontroler
Kp = 20
Tx = 0,1
Kp = 90
Tx = 0,1
Nilai masukan h
V
h
V
h
V
h
V
25 %
50 %
75 %
5.5.2 Kesimpulan
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
71
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
………………………………………………………………………………………………………
5.6 Grafik
5.6.1 Karakteristik Respon Transien Plant Tangki Proposional
Gambar 5.7 Grafik Karakterisik Respon Transien Plant Tangki Proporsional

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
72
5.6.2 Karakteristik Respon Transien dari Plant Tangki Integral
Gambar 5.8 Grafik Karakteristik Respon Transien Plant Tangki Integral
5.6.3 Karakteristik Respon Transien dari PT 1 dengan Kontroler Proposional
Gambar 5.9 Grafik Karakteristik Respon Transien Plant PT1 Kontroler Proporsional, Kp = 5

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
73
Gambar 5.10 Grafik Karakteristik Respon Transien Plant PT1 Kontroller Proporsional, Kp = 20
5.6.4 Karakteristik Respon Transien dari PT 1 dengan Kontroler Proposional Integral
Gambar 5. 11 Grafik Karakteristik Respon Transien Plant PT1 dengan Kontroler Proporsional Integral, Kp = 5

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
74
Gambar 5.12 Grafik Karakteristik Respon Transien Plant PT1 dengan Kontroller Proporsional Integral, Kp = 20
5.6.5 Grafik Perbandingan L terhadap H
Gambar 5.11 Grafik Perbandingan L terhadap H
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
75
5.7 Analisis Data
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………

LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
76
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
5.8 Tugas
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
LABORATORIUM SISTEM KONTROL
JURUSAN TEKNIK ELEKTRO FAKULTAS TEKNIK
UNIVERSITAS BRAWIJAYA
77
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………
……………………………………………………………………………………………………