rancang bangun alat pendingin dan penggiling biji …digilib.unila.ac.id/55736/3/skripsi tanpa...
TRANSCRIPT

1
RANCANG BANGUN ALAT PENDINGIN DAN PENGGILING BIJI KOPI
OTOMATIS BERBASIS MIKROKONTROLER ARDUINO ATMEGA 2560
(Skripsi)
Oleh
MOHAMAD RIZKI ALAM
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2018

ii
ABSTRACT
MODEL DESIGN OF AUTOMATIC MACHINE COOLING AND
GRINDING BEAN COFFE BASED ON ARDUINO ATMEGA 2560
MICROCONTROLLER
By
MOHAMAD RIZKI ALAM
In a modern era many manufacturing products are fully automated to help humans to
do their jobs. One of work that requires machine assistance is the cooling and
grinding of coffee beans. The processing of coffee beans is divided into three
process, namely roasting, cooling, and grinding. For this time the three processes are
still carried out by a stand-alone tool. Therefore an integrated tool is needed.
Automatic machine of cooling and grinding uses a microcontroller to regulate work
of DC fan, L298N motor driver, Motor DC for cooling and grinding, temperature
sensor, and delay timer. In this machine using coffee beans with a mass of 100
grams, the roasting time of coffee beans is 35 to 65 minutes with a roasting
temperature of 120oC and a power of machine is 120 Watts. Results in the cooling
process takes 431.522 seconds to cool the roasted coffee beans. In the process of
dropping coffee beans from the cooling tube to the grinding tube it takes 80 seconds
for one dropping process with an error rate of coffee beans that does not fall 0.056%.
Coffee bean grinding with burr grinder can smooth a coffee beans with an average
time of 779.6 seconds for coarse smoothness, 959.8 seconds for medium fine
smoothness, and 1146.8 seconds with fine smoothness.
Keyword: Microcontroller, Cooling Coffee Beans, Grinding Coffee Beans

iii
ABSTRAK
RANCANG BANGUN ALAT PENDINGIN DAN PENGGILING BIJI KOPI
OTOMATIS BERBASIS MIKROKONTROLER ARDUINO ATMEGA 2560
Oleh
MOHAMAD RIZKI ALAM
Pada zaman modern banyak produk-produk manufaktur yang serba otomatis untuk
membantu manusia dalam mengerjakan pekerjaannya. Salah satu kerja yang
membutuhkan bantuan mesin adalah pendinginan dan penggilingan biji kopi. Proses
pengolahan biji kopi terbagi menjadi tiga yaitu penyangraian, pendinginan, dan
penggilingan. Pada saat ini ketiga proses tersebut masih dilakukan alat yang berdiri
sendiri. Oleh karena itu dibutuhkan alat yang terintegrasi. Alat pendinginan dan
penggilingan otomatis ini menggunakan mikrokontroler untuk mengatur kerja kipas
DC, motor driver L298N, Motor DC pendingin dan penggiling, Sensor suhu, dan
Timer delay. Pada alat ini menggunakan biji kopi dengan massa 100 gram, waktu
penyangraian biji kopi 35 sampai 65 menit dengan suhu penyangraian 120oC dan
daya 120 Watt. Hasil dalam Proses pendinginan diperlukan waktu 431,522 detik
untuk mendinginkan biji kopi yang telah di sangrai. Pada proses penjatuhan biji kopi
dari tabung pendingin menuju tabung penggiling diperlukan waktu 80 detik untuk
satu kali proses penjatuhan dengan tingkat error biji kopi yang tidak jatuh 0,056%.
Penggilingan biji kopi dengan mata pisau burr grinder dapat menghaluskan biji kopi
dengan rata-rata waktu 779,6 detik untuk tingkat kehalusan coarse, 959,8 detik untuk
tingkat kehalusan medium fine, dan waktu 1146,8 detik dengan tingkat kehalusan
fine.
Kata Kunci: Mikrokontroler, Pendinginan Biji Kopi , Penggilingan Biji Kopi
iv
RANCANG BANGUN ALAT PENDINGIN DAN PENGGILING BIJI KOPI
OTOMATIS BERBASIS MIKROKONTROLER ARDUINO ATMEGA 2560
Oleh
MOHAMAD RIZKI ALAM
Skripsi
Sebagai salah satu syarat mencapai gelar
SARJANA TEKNIK
Pada
Jurusan Teknik Elektro
Fakultas Teknik Universitas Lampung
FAKULTAS TEKNIK
UNIVERSITAS LAMPUNG
BANDAR LAMPUNG
2018
v
vi
:

vii

i
RIWAYAT HIDUP
Penulis dilahirkan di Bandar Lampung pada tanggal 24 Oktober
1996, anak dari bapak Hartawan Alam dan ibu Norita Musiana,
anak ke tiga dari 4 bersaudara. Pendidikan sekolah dasar,
diselesaikan pada tahun 2008 di SDN 2 Sukarame Bandar
Lampung, sekolah menengah pertama diselesaikan di SMP Negeri 29 Bandar
Lampung pada tahun 2011, kemudian penulis melanjutkan pendidikan sekolah
menengah akhir di SMA Negeri 5 Bandar Lampung.
Pada tahun 2014 penulis, melanjutkan pendidikan di Universitas Lampung dengan
jalur SNMPTN 2014. Selama menimba ilmu di Universitas Lampung penulis aktif
dalam organisasi Himpunan Mahasiswa Elektro (HIMATRO) menjabat sebagai
anggota minat dan bakat pada tahun 2016. Penulis pernah menjadi asisten Praktikum
Dasar Elektronika dan Praktikum Elektronika Lanjut di Laboratorium Teknik
Elektro. Penulis pernah menjadi Koordinator Laboratorium Elektronika pada tahun
2017-2018.
Penulis pernah melakukan kerja praktik di di PT. Wijaya Karya, Bogor Indonesia
pada tahun 2017 dan melaksanakan Kuliah Kerja Nyata di Desa Sinar Jawa,
Kecamatan Air Naningan, Kabupaten Tanggamus, pada tahun 2018.

2
PERSEMBAHAN
Bismillaahirrohmaanirrohiim
Karya sederhana Ini Saya Persembahkan Kepada Orang Tua
Saya
Drs.Hartawan Alam (alm)
&
Norita Musiana
Yang telah memotivasi dan memberikan seluruh
kemampuannya untuk ku
Taklupa Kepada Ketiga Saudara Ku Tersayang
Yang selalu menyemangati dan memberikan kebahagiaan kehidupan
3
MOTTO
“Tidak Ada Mimpi Yang Terlalu Besar, dan Tidak Ada
Pemimpi Yang Terlalu Kecil”
“Barangsiapa Yang Suka Dilapangkan Rizkinya dan Dipanjangkan Umurnya, Maka Hendaklah Menyambung Tali Silahturahmi”
“Kuliah Itu Sulit, Lebih Sulit
Lagi Pengorbanan Orang Tua mu
Untuk Dirimu, Sebelum Terlambat
Bahagiakanlah Secepatnya Orang
Tuamu”
4
SANWACANA
Puji dan syukur penulis panjatkan kehadirat Tuhan Allah SWT atas limpahan rahmat
dan karunia-Nya sehingga penulis dapat menyelesaikan laporan tugas akhir yang
berjudul Rancang bangun alat pendingin dan penggiling biji kopi otomatis berbasis
mikrokontroler ATmega2560.
Selama menjalani pengerjaan tugas akhir, penulis mendapatkan bimbingan, ilmu
mengenai konsep, dukungan moril, kritik, dan saran yang membangun. Penulis ingin
menyampaikan rasa terima kasih kepada:
1. Allah SWT yang telah memberikan limpahan rahmat dan karunia-Nya sehingga
penulis dapat menyelesaikan laporan tugas akhir.
2. Bapak, Ibu, Mbah dan semua keluarga yang telah mendukung penuh sehingga
saya dapat menyelesaikan laporan tugas akhir ini.
3. Bapak Dr. Ing. Ardian Ulvan, S.T., M.Sc., selaku ketua Jurusan Teknik Elektro
Universitas Lampung.
4. Dr. Herman Halomoan Sinaga, S.T., M.T., selaku sekretaris Jurusan Teknik
Elektro Universitas Lampung.
5. Bapak Syaiful Alam, S.T., M.T., selaku dosen pembimbing akademik.
6. Ibu Dr. Ir. Sri Ratna Sulistiyanti, M.T., selaku pembimbing utama tugas akhir
saya yang telah meluangkan waktu untuk memberikan masukan, bimbingan,
arahan dalam pengerjaan Tugas Akhir ini.

5
7. Ibu Herlinawati, S.T., M.T., selaku pembimbing pendamping tugas akhir saya
yang telah meluangkan waktu untuk memberikan masukan, bimbingan, arahan
dalam pengerjaan Tugas Akhir ini.
8. Bapak Agus Trisanto, M.T.,Ph.D., selaku penguji tugas akhir saya yang telah
memberikan masukan, bimbingan, arahan, saran, kritikan dalam pengerjaan
Tugas Akhir ini.
9. Kakak saya Okto Diaz Zander Alam, Ovane Tyana Ywa Alam dan Adik Saya
Siti Kesuma Ningrum Alam yang telah menjadi acuan saya untuk lebih giat
dalam menyelesaikan laporan kerja praktik ini.
10. Rekan-rekan mahasiswa Teknik Elektro Universitas Lampung Angkatan 2014
dan seluruh Assisten laboratorium elektronika yang telah banyak mendukung
moril untuk saya.
11. Della Arisandi yang telah mendukung saya secara pribadi sehingga saya dapat
mengerjakan tugas akhir dengan penuh semangat.
Penulis menyadari masih terdapat kekurangan dalam penulisan tugas akhir ini, oleh
karena itu penulis membutuhkan kritik dan saran yang membangun. Semoga tugas
akhir ini bermanfaat bagi pembaca. Terima kasih. Wassalamu’alaikum.
Bandar Lampung, Desember 2018
Penulis
Mohamad Rizki Alam
1415031086

i
DAFTAR ISI
Halaman
ABSTRACT .............................................................................................................. ii
ABSTRAK ................................................................................................................ iii
LEMBAR PERSETUJUAN ...................................................................................... v
LEMBAR PENGESAHAN ...................................................................................... vi
SANWACANA ......................................................................................................... xi
DAFTAR ISI ............................................................................................................. xii
DAFTAR GAMBAR ................................................................................................. xv
DAFTAR TABEL ...................................................................................................... xvi
I. PENDAHULUAN
1.1 Latar Belakang ...................................................................................... 1
1.2 Tujuan Penelitian ................................................................................... 3
1.3 Manfaat Penelitian .................................................................................. 3
1.4 Rumusan Masalah .................................................................................. 4
1.5 Batasan Masalah .................................................................................... 4
1.6 Hipotesis ................................................................................................ 5
1.7 Sistematika Penulisan ............................................................................. 5

ii
II. TINJAUAN PUSTAKA
2.1 Arduino ................................................................................................... 8
2.1.1. Arduino ATmega2560................................................................... 8
2.1.2. Software Arduino IDE .................................................................. 9
2.2 Motor DC ............................................................................................... 10
2.3 Motor Driver L298N .............................................................................. 11
2.4 Sensor Ds18b20 ..................................................................................... 12
2.5 Power Supply .......................................................................................... 13
2.6 Burr Grinder ........................................................................................... 14
2.7 Sistem Kendali Open loop dan Close loop ............................................. 15
2.7.1. Sistem Kendali Open Loop ........................................................... 16
2.7.2. Sistem Kendali Close Loop .......................................................... 17
2.8 Motor Servo ............................................................................................ 17
2.9 Kipas ....................................................................................................... 19
III. METODE PENELITIAN
3.1 Tempat dan Waktu Penelitian .................................................................. 20
3.2 Alat dan Bahan ........................................................................................ 20
3.2.1 Komponen ....................................................................................... .20
3.2.2 Peralatan dan Bahan ........................................................................ .20
3.3 Spesifikasi Sistem Alat ............................................................................ .21
3.4 Tahap-Tahapan Dalam Pembuatan Tugas Akhir ...................................... 22
3.4.1 Studi Literatur ................................................................................. 22

iii
3.4.2 Rancangan Perangkat Sistem .......................................................... 23
3.4.3 Blok Diagram .................................................................................. 26
3.4.4 Rancangan Sistem Alat ................................................................... 29
3.4.5 Desain Alat ...................................................................................... 32
3.4.6 Pengujian Perangkat Sistem Alat .................................................... 34
3.4.7 Analisa ............................................................................................ 35
IV. PEMBAHASAN
4.1 Pengujian Perangkat keras ............................................................................... 37
A. Pengujian Sensor Suhu ........................................................................ 37
B. Pengujian Tampilan LCD .................................................................... 39
C. Pengujian Motor Servo ........................................................................ 40
D. Pengujian Motor Driver dan Akuator .................................................. 43
4.2 Pengujian Sistem ............................................................................................. 45
4.2.1 Pengujian Waktu Capai Pendinginan Biji Kopi ........................... 45
4.2.2 Pengujian Waktu Capai Penjatuhan Biji Kopi ............................. 48
4.2.3 Pengujian Waktu Capai dan Tingkat Kehalusan .......................... 50
V. SIMPULAN DAN SARAN
5.1 Kesimpulan ...................................................................................................... 54
5.2 Saran ................................................................................................................ 55
DAFTAR PUSTAKA
LAMPIRAN
i
DAFTAR GAMBAR
Gambar Halaman
2.1. Arduino ATmega2560. ....................................................................... 9
2.2. Jendela Awal Software Arduino IDE ................................................. 10
2.3. Bagian Motor DC ............................................................................... 11
2.4. Diagram blok L298N .......................................................................... 12
2.5. Sensor Suhu Ds18b20 ......................................................................... 13
2.6. Power Supply ...................................................................................... 14
2.7. Burr Grinder ....................................................................................... 15
2.8. Sistem Kendali Kalang Terbuka ......................................................... 16
2.9. Sistem Kendali Kalang Tertutup ........................................................ 17
2.11. Posisi Motor Servo Saat Diberi Pulsa .................................................. 18
2.15. Kipas .................................................................................................... 19
3.1. Diagram Alir Pelaksanaan Tugas Akhir .............................................. 23
3.2. Rancangan Perangkat Sistem ............................................................... 24
3.3. Blok Diagram Alat Pendingin dan Penggiling Biji Kopi Otomatis..... 26
3.4. Flowchart alat penggiling biji kopi otomatis ...................................... 28
3.5. Rangkaian Pengendali Suhu Biji Kopi ................................................. 30

ii
3.6. Rangkaian Skematik Pengendali Motor Penggiling ............................. 32
3.7. Desain Alat Pendingin dan Penggiling Biji Kopi Otomatis ................. 33
3.8. Desain Alat Pendingin dan Penggiling Biji Kopi Otomatis ................. 33
4.1 Pembacaan Suhu Oleh Sensor .............................................................. 38
4.2. Listing Program Pengukuran Suhu Menggunakan LCD ...................... 39
4.3. Hasil Pengujian Penampilan Data Suhu Menggunakan LCD .............. 40
4.4. Listing Program Motor Servo ............................................................... 41
4.5. Hasil Pengujian Motor Servo ............................................................... 42
4.6. Hasil Pengujian Motor Driver L298N dan Akuator ............................. 43
4.7. Program Pengontrolan Motor DC ......................................................... 44
4.8. Tabung Pendingin ................................................................................. 47
4.8. Tabung Penggiling ................................................................................ 53

i
DAFTAR TABEL
Gambar Halaman
4.1. Pengujian Pemgukuran Sensor dan Thermometer. ............................. 38
4.2. Pengujian Ketelitian Waktu Pendinginan Biji Kopi ........................... 45
4.3. Pengujian Ketelitian Waktu Penjatuhan Biji Kopi ............................. 48
4.4. Pengujian Waktu Capai dan Tingkat Kehalusan ................................ 50

55
I. PENDAHULUAN 1.1 Latar Belakang
Teknologi kontrol otomatis semakin berkembang secara pesat meningkatnya
kebutuhan akan bidang otomasi pada berbagai peralatan untuk keperluan industri,
keperluan rumah tangga dan keperluan lainnya. Sistem kontrol otomatis di program
dengan kebutuhan yang diperlukan. Industri rumah tangga dan industri kecil banyak
yang menggunakan mesin dan peralatan-peralatan konvensional yang dioperasikan
secara manual dengan menggunakan tenaga dari manusia. Proses produksi yang
menggunakan tenaga manusia sangat bergantung pada keterbatasan dari tenaga
manusia. Hal tersebut membuat proses produksi dapat berjalan sangat lama,
menggunakan peralatan yang bekerja secara otomatis dapat meningkatkan produksi
dengan kerja maksimal pada bidang industri (Khoirul Abasi,2016).
Pada industri kecil berskala rumahan untuk meningkatkan pengolahan hasil-hasil
pertanian khususnya pada proses penyangraian, pendinginan, dan penggilingan biji
kopi diperlukan suatu media yang cepat dan efisien. Pengolahan hasil produksi yang
cepat dan efisien berbanding lurus dengan sifat manusia yang lebih cenderung

2
menginginkan sesuatu secara praktis tanpa banyak membuang waktu dan tenaga.
Produksi bubuk kopi menggunakan peralatan konvensional seperti penumbukan biji
kopi sangat kurang efektif dimana konsumen akan menyadari bahwa hasil tumbukan
yang masih kasar tersebut akan menyisakan rasa kopi yang tidak dapat dinikmati
secara total karena masih ada rasa yang tertinggal di dalam butiran kopi, sehingga
orang makin berpikir untuk menemukan sebuah mekanisme yang mampu
menghasilkan butiran kopi yang lebih halus. Maka dari itu penulis membuat
penelitian dengan membuat alat pendingin dan penggiling biji kopi secara otomatis
untuk memudahkan industri lebih cepat untuk memasarkan kopi ke tangan konsumen
dan meningkatkan kualitas produk kopi (Ariwibowo,2013).
Peningkatan mutu biji kopi hingga menjadi bubuk kopi perlu diperhatikan mengenai
penanganan pasca panen. Usaha perbaikan melalui penanganan teknologi pasca
panen yang praktis untuk menekanntingkat kehilangan secara kuantitatif serta
praktis, efektif dan murah. Pada dewasa ini biji kopi akan melalui tiga proses
penanganan pasca panen yaitu disangrai, didinginkan dan dihaluskan. Pada proses
pendinginan diperlukan suhu kopi yang telah normal untuk dilakukan proses
penggilingan. Kemudian biji kopi akan dihaluskan menggunakan mata pisau (burr
grinder) hingga diperoleh kopi bubuk dengan tiga tingkat kehalusan kasar, sedang,
dan halus. Pada tugas akhir ini akan dirancang sebuah alat pendinginan dan
penggilingan biji kopi secara otomatis. Rancangan ini akan mengendalikan suhu biji
kopi pada tabung penampung pendinginan setelah dilakukan proses penyangraian.
Pada proses pendinginan menggunakan sensor suhu Ds18b20 sebagai indikator suhu

3
yang akan ditampilkan pada LCD, motor DC digunakan untuk pengaduk biji kopi
pada tabung pendingin dan aktuatorpada proses penggilingan, dan kipas DC sebagai
penurun suhu biji kopi saat setelah dilakukan proses penyangraian. Setelah proses
pendinginan sesuai dengan suhu yang kita tentukan maka servo akan aktif untuk
menjatuhkan biji kopi dan motor DC pada penggilingan akan aktif juga untuk
melakukan proses penggilingan biji kopi.
1.2 Tujuan Penelitian
Adapun tujuan dari penelitian ini adalah sebagi berikut:
1. Merancang dan merealisasikan alat pendingin dan penggiling biji kopi otomatis
berbasis mikrokontroler arduino.
2. Mengetahui waktu pencapaian yang digunakan pada proses pendinginan dan
penggilingan biji kopi.
1.3 Manfaat Penelitian
Manfaat yang diharapkan dari penelitian ini adalah:
1. Meningkatkan efisiensitas waktu pada pengolahan biji kopi dari proses
pendinginan sampai dengan penggilingan menjadi bubuk kopi.
2. Dapat menjadi wacana baru bagi industri kecil maupun industri rumah tangga
agar bisa memberdayakan teknologi secara tepat guna untuk meningkatkan
kualitas produksi biji kopi.

4
3. Dapat diaplikasikan dan dipasarkan secara luas dalam masyarakat sehingga dapat
memberikan kemudahan bagi penggunanya.
1.4 Rumusan Masalah
Rumusan masalah pada penelitian ini adalah sebagai berikut:
1. Bagaimana merancang dan merealisasikan sebuah alat pendingin dan penggiling
biji kopi otomatis berbasis mikrokontroler arduino Atmega2560?
2. Bagaimana mengetahui efektifitas rangkaian pengendali suhu biji kopi pada
tabung pendingin biji kopi menggunakan sensor suhu Ds18b20, kipas, dan motor
DC?
3. Bagaimana merancang penggunaan motor DC dan mata pisau burr grinder
sebagai rangkaian penggiling biji kopi?
1.5 Batasan Masalah
Sesuai dengan penelitian yang akan dilakukan, penulis akan dibatasi oleh hal-hal
sebagai berikut:
1. Bahan dasar untuk menggiling kopi ini fokus menggunakan biji kopi lampung
yang telah disangrai sebelumnya.
2. Penelitian ini menitik beratkan pada waktu capai proses pendinginan,
penggilingan biji kopi.

5
3. Pada penelitian ini hanya membahas komponen yang digunakan pada rangkaian
sistem yaitu Arduino Atmega, Sensor suhu Ds18b20, Driver Motor L298N,
Kipas DC.
1.6 Hipotesis
Penelitian ini adalah otomatisasi pada pengendalian suhu biji kopi pada tabung
pendinginan dan proses penggilingan biji kopi dilakukan pada satu alat terintegrasi
berbasis mikrokontroler arduino untuk dapat menghasilkan bubuk kopi yang
berkualitas rasa dan aromanya.
1.7 Sistematika Penulisan
Sitematika penulisan laporan tugas akhir ini, agar memudahkan penulis dan
pemahaman mengenai tugas akhir maka pada laporan ini dibagi menjadi 5 bab,
yaitu:
BAB I PENDAHULUAN
Berisi tentang latar belakang, tujuan, manfaat penelitian, rumusan masalah, batasan
masalah, hipotesis, dan sistematika penelitian.
BAB II TINJAUAN PUSTAKA
Menerangkan tentang teori dan literature penggunaan Arduino, Motor DC, burr mill,
LCD, Kipas, Sensor suhu Ds18b20, Motor servo dan teori-teori dasar yang
mendukung dalam perancangan alat pendingin dan penggiling biji kopi.
6
BAB III METODE PENELITIAN
Berisikan tentang penelitian yang dilakukan diantaranya waktu dan tempat penelitian,
alat dan bahan, pembutan alat, dan pengujian alat yang diusulkan.
BAB IV HASIL DAN PEMBAHASAN
Menjelaskan dan membahas hasil dari penelitian, pembahasan, perhitungan, analisis,
pengujian, dan kinerja alat.
BAB V KESIMPULAN DAN SARAN
Memuat simpulan yang diperoleh dari hasil pembuatan dan pengujian alat, dan
saran-saran untuk pengembangan lebih lanjut.
DAFTAR PUSTAKA
LAMPIRAN

55
II. TINJAUAN PUSTAKA
Penelitian terdahulu yang lainnya dibangun alat rancang bangun alat penyangrai kopi
dan penggiling kopi otomatis berbasis mikrokontroler. Penelitian ini menggunakan
mikrokontroler Atmega 16 dengan daya 500 Watt. Pada alat ini digunakan pemanas
200oC pada tabung penyangraian, waktu yang dibutuhkan untuk memanaskan tabung
berkisar 1-2 jam. Proses lamanya penggilingan menggunakan masukan set timer saat
akan menggiling biji kopi, hasil kopi yang digiling hanya kasar atau coarse dengan
mata pisau berbentuk blade (Abdillah Alfarizqi, 2016).
Pada penelitian terdahulu yaitu rancang bangun alat penggiling biji kopi tipe flat
burr mill oleh Samuel haposan, dkk. Pada penelitian ini alat penggiling biji kopi
menggunakan motor listrik sebagai penggerak utama untuk menghaluskan biji kopi,
menggunakan mata pisau flat burr mill. Pada penelitian ini memiliki kapasitas
penggilingan 5 kg/jam dengan persentase rata-rata biji kopi robusta yang hilang
sebesar 1,112% (Samuel Haposan, 2013).
Pada penelitian ini dibuat sebuah rancang bangun alat pendingin dan penggiling biji
kopi otomatis menggunakan mikrokontroler arduino Atmega2560. Pada alat ini
proses pendinginan akan dilakukan dengan biji kopi yang telah disangrai
sebelumnya. Pada proses penyangraian menggunakan tubular heater sebagai
pemanas, set point suhu 120oC dengan waktu penyangraian 35 sampai dengan 65
menit.

8
Pada tahap selanjutnya saat biji kopi telah masuk kedalam tabung pendingin, sensor
suhu Ds18b20 akan mengukur besaran suhu pada biji kopi. Apabila suhu biji kopi
diatas set point 32oC maka motor pengaduk dan kipas pada tabung penggiling akan
aktif menurunkan suhu biji kopi sampai dengan set point yang telah ditentukan.
Proses selanjutnya biji kopi akan diturunkan menuju ke tabung penggilingan dengan
motor pengaduk pada tabung pendingin. Biji kopi yang telah masuk kedalam tabung
penggiling akan dihaluskan dengan mata pisau burr grinder dengan tiga tingkat
kehalusan halus (fine), sedang (medium fine), dan kasar (coarse).
2.1 Arduino
Arduino adalah platform open-source yang digunakan untuk membangun proyek-
proyek elektronik. Tidak seperti kebanyakan papan sirkuit yang dapat diprogram
sebelumnya, Arduino tidak membutuhkan perangkat keras terpisah (disebut
programmer) untuk memuat kode baru ke papan cukup menggunakan kabel USB.
Selain itu, Arduino IDE menggunakan versi C ++ yang disederhanakan,
membuatnya lebih mudah untuk belajar memprogram. Akhirnya, Arduino
menyediakan faktor bentuk standar yang memecah fungsi pengendali mikro menjadi
paket yang lebih mudah diakses.
2.1.1. Arduino ATmega2560
Mikrokontroler berbasis mikrokontroler AVR ATmega2560. Ini memiliki 70
in input/output digital (dimana 14 dapat digunakan sebagai output PWM dan
16 dapat digunakan sebagai input analog), sebuah resonator 16 MHz, koneksi

9
USB, sebuah pusat barel positif tengah 2,5mm, seri dalam rangkaian
pemrograman (ICSP), dan tombol reset. Ini berisi semua yang dibutuhkan
untuk mendukung mikrokontroler; cukup hubungkan ke komputer dengan
kabel USB atau nyalakan dengan adaptor AC-ke-DC atau baterai untuk
memulai. Mega 2560 berbeda dari Mega sebelumnya karena tidak
menggunakan chip driver FTDI USB-ke-serial. Sebaliknya, fitur Atmega8U2
diprogram sebagai konverter USB-to-serial. Mikrokontroler tambahan ini
memiliki bootloader USB sendiri, yang memungkinkan pengguna tingkat
lanjut memprogram ulang (Luthfi Wibowo, 2017). Berikut ini pada Gambar
2.1 di bawah adalah Arduino Atmega2560:
Gambar 2.1 Arduino ATmega2560
1.1.2. Software Arduino IDE
Arduino IDE adalah aplikasi lintas platform ringan yang memperkenalkan
pemrograman ke pemula. Ini memiliki baik editor online dan aplikasi on-
premise, bagi pengguna untuk memiliki pilihan apakah mereka ingin
menyimpan sketsa mereka di awan atau secara lokal di komputer mereka
sendiri. Dengan Arduino IDE, pengguna dapat mengakses pustaka kontribusi

10
dengan mudah dan menerima dukungan terbaru untuk papan Arduino terbaru,
sehingga mereka dapat membuat sketsa yang didukung oleh versi terbaru IDE.
Konsol menampilkan keluaran teks oleh Arduino Software (IDE), Sudut
kanan bawah jendela menampilkan papan dan port serial yang dikonfigurasi.
Tombol bilah alat memungkinkan Anda memverifikasi dan mengunggah
program, membuat, membuka, dan menyimpan sketsa, dan membuka monitor
serial (misalnya, mengubah mode pin, data keluaran pada pin, membaca nilai
analog, dan pengatur waktu. Berikut ini adalah tampilan Software pada
Gambar 2.2 di bawah ini:
Gambar 2.2. Jendela Awal Software Arduino IDE
2.2 Motor DC
Komponen utama Dc Motors adalah Windings, Magnet, Rotors, Brushes, Stator dan
sumber arus searah. Ketika angker ditempatkan di medan magnet yang dihasilkan
oleh magnet atau gulungan medan dan angker diputar dengan menggunakan arus
langsung menghasilkan gaya mekanik sesuai dengan pernyataan di atas. Kita dapat
memanfaatkan kekuatan ini untuk melakukan jenis pekerjaan tertentu yang kita
11
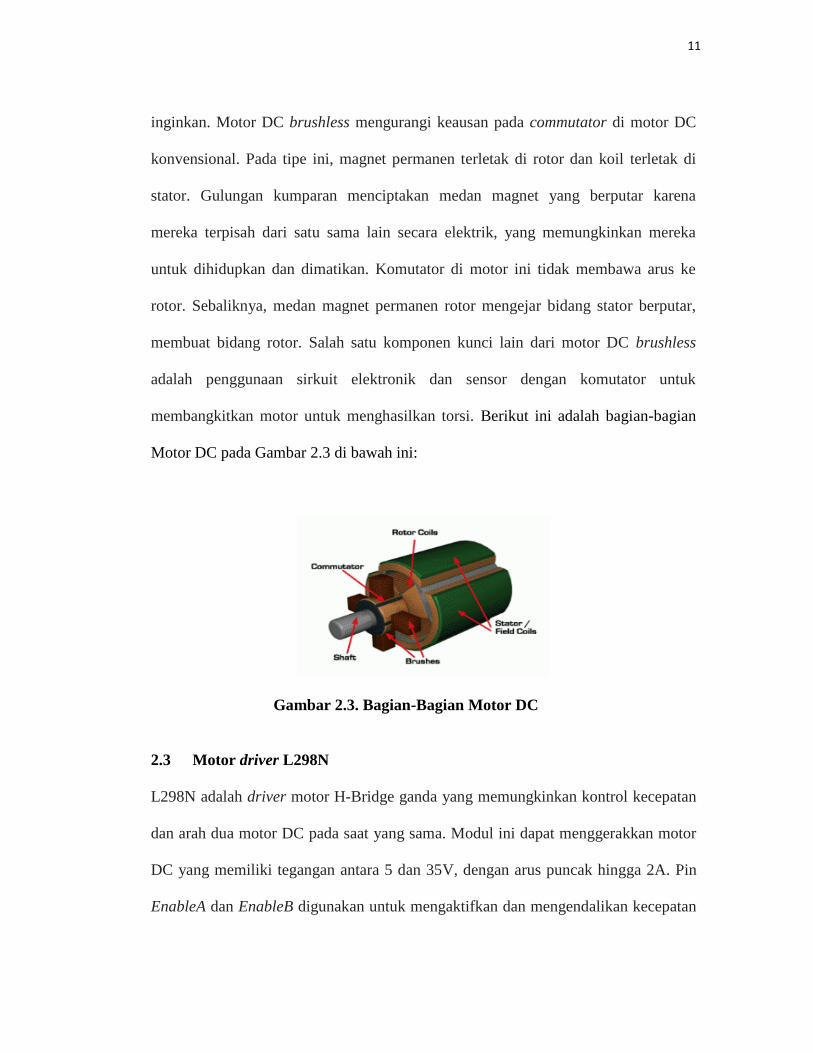
inginkan. Motor DC brushless mengurangi keausan pada commutator di motor DC
konvensional. Pada tipe ini, magnet permanen terletak di rotor dan koil terletak di
stator. Gulungan kumparan menciptakan medan magnet yang berputar karena
mereka terpisah dari satu sama lain secara elektrik, yang memungkinkan mereka
untuk dihidupkan dan dimatikan. Komutator di motor ini tidak membawa arus ke
rotor. Sebaliknya, medan magnet permanen rotor mengejar bidang stator berputar,
membuat bidang rotor. Salah satu komponen kunci lain dari motor DC brushless
adalah penggunaan sirkuit elektronik dan sensor dengan komutator untuk
membangkitkan motor untuk menghasilkan torsi. Berikut ini adalah bagian-bagian
Motor DC pada Gambar 2.3 di bawah ini:
Gambar 2.3. Bagian-Bagian Motor DC
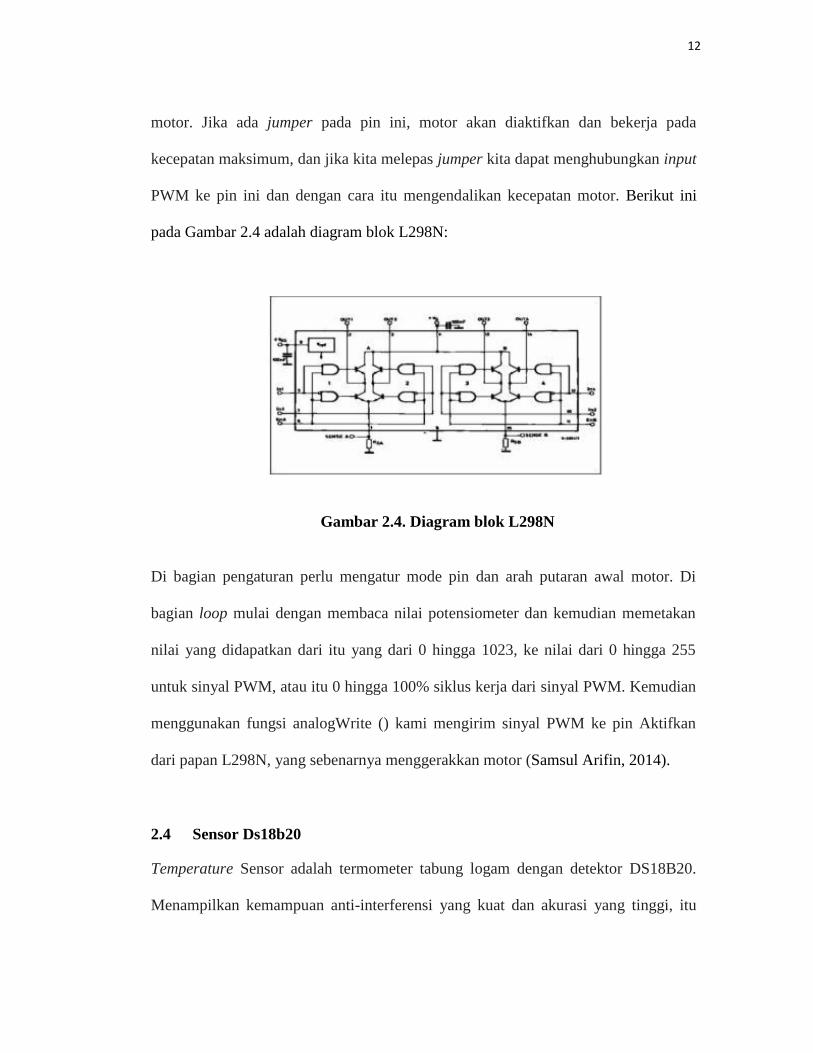
2.3 Motor driver L298N
L298N adalah driver motor H-Bridge ganda yang memungkinkan kontrol kecepatan
dan arah dua motor DC pada saat yang sama. Modul ini dapat menggerakkan motor
DC yang memiliki tegangan antara 5 dan 35V, dengan arus puncak hingga 2A. Pin
EnableA dan EnableB digunakan untuk mengaktifkan dan mengendalikan kecepatan
12
motor. Jika ada jumper pada pin ini, motor akan diaktifkan dan bekerja pada
kecepatan maksimum, dan jika kita melepas jumper kita dapat menghubungkan input
PWM ke pin ini dan dengan cara itu mengendalikan kecepatan motor. Berikut ini
pada Gambar 2.4 adalah diagram blok L298N:
Gambar 2.4. Diagram blok L298N
Di bagian pengaturan perlu mengatur mode pin dan arah putaran awal motor. Di
bagian loop mulai dengan membaca nilai potensiometer dan kemudian memetakan
nilai yang didapatkan dari itu yang dari 0 hingga 1023, ke nilai dari 0 hingga 255
untuk sinyal PWM, atau itu 0 hingga 100% siklus kerja dari sinyal PWM. Kemudian
menggunakan fungsi analogWrite () kami mengirim sinyal PWM ke pin Aktifkan
dari papan L298N, yang sebenarnya menggerakkan motor (Samsul Arifin, 2014).
2.4 Sensor Ds18b20
Temperature Sensor adalah termometer tabung logam dengan detektor DS18B20.
Menampilkan kemampuan anti-interferensi yang kuat dan akurasi yang tinggi, itu

13
ditutupi dengan selang karet tahan air di luar dan mampu mengukur suhu dalam
kisaran -55 ℃ ~ + 125 ℃. VDD (power pin), Pin GND akan terhubung dengan
ground, pin VDD akan dihubungkan dengan pin data dengan resistor pull up sebesar
4,7K [6]. Berikut ini pada Gambar 2.5 adalah sensor Ds18b20:
Gambar 2.5. Sensor Suhu DS18b20
Pada Gambar 2.5. diketahui bahwa sensor Ds18b20 merupakan sensor temperature
yang memiliki 12 bit ADC. Sensor DS18b20 memiliki akurasi +/- 0.5 derajat,
apabila tegangan refrensi yang digunakan 5Volt, akibat perubahan suhu 5/ (212
-1) =
0.0012V pada rentang suhu -10 sampai 85 derajat celcius.
1.5 Power Supply
Catu daya mengambil AC dari stopkontak, mengubahnya menjadi DC yang tidak
diatur, dan mengurangi tegangan menggunakan transformator daya input, biasanya
menurunkannya ke tegangan yang dibutuhkan oleh beban. Untuk alasan keamanan,
trafo juga memisahkan catu daya output dari input induk. Arus bolak-balik
mengambil bentuk gelombang sinusoidal dengan tegangan bergantian dari positif ke

14
negatif dari waktu ke waktu. . Berikut ini pada Gambar 2.6 adalah power supply
berikut ini:
Gambar 2.6. Power Supply
Pada langkah pertama dari proses, tegangan diperbaiki menggunakan satu set dioda.
Rektifikasi mengubah AC sinusoidal. Rectifier mengubah gelombang sinus menjadi
serangkaian puncak positif. Setelah tegangan telah diperbaiki, masih ada fluktuasi
dalam bentuk gelombang waktu antara puncak yang perlu dihapus. Tegangan AC
yang sudah diperbaiki kemudian disaring atau dihaluskan dengan kapasitor.
2.6 Burr grinder
Penggiling duri menggunakan dua permukaan abrasif atau kasar untuk menggiling
biji kopi, untuk beberapa pada satu waktu. Penggiling duri mengambilnya perlahan
menarik biji melalui mekanisme penggilingan beberapa demi satu untuk
menghasilkan gerinda seragam setiap waktu. Penggiling duri menawarkan
menghasilkan penggilingan yang sangat merata, dengan setiap partikel berukuran
cukup konsisten (Ginting Wawan, 2013). Hal ini menghasilkan ekstraksi yang lebih

15
merata dan karenanya lebih baik mencicipi kopi. Ini juga menghasilkan lebih sedikit
partikel yang sangat kecil dalam secangkir kopi. Karena ruang antara dua duri diatur
secara manual, ukuran penggilingan dapat diatur dan kemudian diulang. Berikut ini
pada Gambar 2.7 adalah mata pisau yang digunakan pada rancangan ini:
Gambar 2.7. Burr grinder
2.7 Sistem Kendali Open Loop dan Close Loop
Sistem kontrol adalah sistem perangkat atau perangkat, yang mengatur,
memerintahkan, mengarahkan atau mengatur perilaku perangkat atau sistem lain
untuk mencapai hasil yang diinginkan. sistem kontrol digunakan seperti dalam
kontrol kualitas produk, sistem senjata, sistem transportasi, sistem tenaga, teknologi
ruang angkasa, robotika, dan banyak lagi. Prinsip-prinsip teori kontrol berlaku untuk
bidang teknik dan non-rekayasa. Secara umum, sistem kendali dibedakan menjadi
dua jenis yaitu:

16
2.7.1. Sistem Kendali Open Loop
SistemmkontrolalooppterbukammengambilLinput berdasarkan pertimbangan
dan tidak bereaksi pada umpan balik untuk mendapatkan output. Inilah
sebabnya mengapaaini juga disebut sistemmkontrol non-umpan balik. Tidak
ada gangguan atau variasi dalammsistem ini dan berfungsippada kondisi fix.
Sistem looppterbuka tidak memiliki pengetahuan tentang kondisi output
sehingga tidak dapat memperbaikikkesalahan yang bisa dilakukan sendiri.
Blok diagram dari sistem kendalikkalang terbuka dapat dilihat pada Gambar
2.8. dibawah ini.
Gambar 2.8. Sistem Kendali Kalang Terbuka
Sebuah sistem kendali terdiri atas sejumlah subsistem berikut ini adalah
subsistem dasar yang menyusun sistem kendali kalang terbuka yaitu:
a. Elemen kendali, elemen kendali ini menentukan aksi yang akan dilakukan
sebagai masukan sistem kendali.
b. Elemen pengoreksi, elemen ini menanggapi masukan dari elemen kendali
dan memulai aksi untuk mengubah perubah yang dikendalikan untuk nilai
acuan.
c. Proses, proses atau plant adalah sistem atau variable yang dikendalikan.

17
2.7.2. Sistem Kendali Close Loop
Sistem kontrollloop tertutuppberartiioutputtdari sistem tergantung pada input. Sistem
memiliki satu atau lebih umpan balik antara output dan inputnya. Desain
sistemlloopttertutup sedemikian rupa sehingga secaraootomatis memberikan output
yang diinginkan dengan membandingkannya dengan input yang sebenarnya.
Sistemlloopptertutupmmenghasilkan sinyalkkesalahannyangmmerupakanpperbedaan
antaraiinput dan output. Untuk proses yang berkelanjutan, loop umpan balik
mempertahankan variabel proses pada nilai yang diinginkan yang dikenal sebagai
setpoint. Blok diagram dari sistem kendali kalan tertutup dapat dilihat pada Gambar
2.9. dibawah ini.
Gambar 2.9. Sistem Kendali Kalang Tertutup
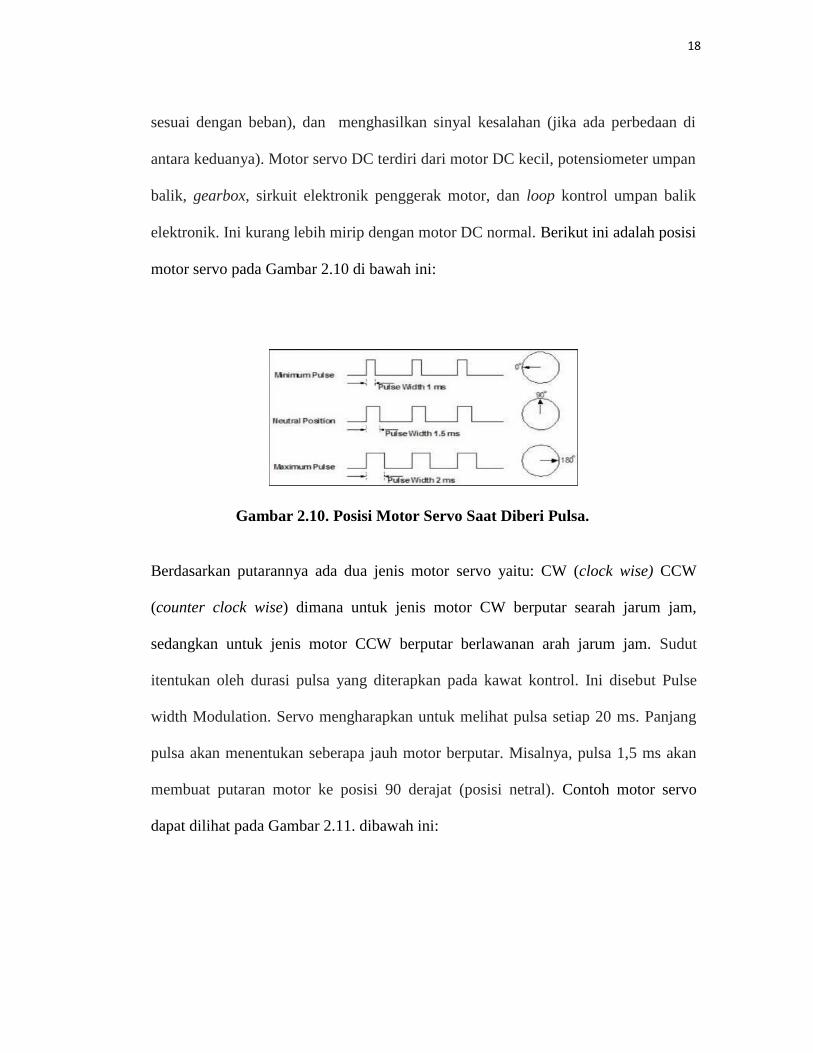
2.8 Motor Servo
Motor servo adalah aktuator linier atau putar yang menyediakan kontrol posisi
presisi yang cepat untuk aplikasi kontrol posisi loop tertutup. Sinyal umpan balik ini
dibandingkan dengan posisi perintah input (posisi yang diinginkan dari motor yang
18
sesuai dengan beban), dan menghasilkan sinyal kesalahan (jika ada perbedaan di
antara keduanya). Motor servo DC terdiri dari motor DC kecil, potensiometer umpan
balik, gearbox, sirkuit elektronik penggerak motor, dan loop kontrol umpan balik
elektronik. Ini kurang lebih mirip dengan motor DC normal. Berikut ini adalah posisi
motor servo pada Gambar 2.10 di bawah ini:
Gambar 2.10. Posisi Motor Servo Saat Diberi Pulsa.
Berdasarkan putarannya ada dua jenis motor servo yaitu: CW (clock wise) CCW
(counter clock wise) dimana untuk jenis motor CW berputar searah jarum jam,
sedangkan untuk jenis motor CCW berputar berlawanan arah jarum jam. Sudut
itentukan oleh durasi pulsa yang diterapkan pada kawat kontrol. Ini disebut Pulse
width Modulation. Servo mengharapkan untuk melihat pulsa setiap 20 ms. Panjang
pulsa akan menentukan seberapa jauh motor berputar. Misalnya, pulsa 1,5 ms akan
membuat putaran motor ke posisi 90 derajat (posisi netral). Contoh motor servo
dapat dilihat pada Gambar 2.11. dibawah ini:

19
Gambar 2.11. Bagian-bagian Motor Servo
2.9 Kipas
Kipas adalah komponen elektronika yang memiliki fungsi untuk mengeluarkan panas
mengganti dengan udara segar kedalam sistem. Sistem pendingin merupakan sebuah
sistem untuk membantu proses pendinginan pada mesin yang sedang melakukan
proses kerja maka menghasilkan kalor atau suhu yang panas yang dapat
menyebabkan komponen-komponen elektronika resikonya akan terjadi overheat.
Berikut pada Gambar 2.12. merupakan gambar kipas.
Gambar 2.12. Kipas Pendingin

55
III METODE PENELITIAN
3.1 Tempat dan Waktu Penelitian
Penelitian tugas akhir telah dilaksanakan di Laboratorium Teknik Elektro, pada
bulan Mei sampai dengan bulan November 2018.
3.2 Alat dan Bahan
Alat dan bahan yang digunakan pada tugas akhir dan penelitian ini adalah sebagai
berikut:
3.2.1 Komponen
1. Arduino ATmega 2560
2. Motor 12 V DC
3. Sensor Suhu DS18b20
4. Driver Motor L298N
5. Kabel Penghubung
6. Mata Pisau Burr grinder
7. Kipas
8. Motor Servo
3.2.2 Peralatan dan Bahan
1. Laptop dan Software Pendukungnya
2. Solder dan Timah.
21
3. Akumulator 12V
4. Bor dan gerinda.
5. Baut dan Mur.
6. Board Arduino.
7. Besi, Siku-siku, dan lem.
3.3 Spesifikasi Sistem Alat
Spesifikasi alat yang digunakan dalam tugas akhir ini adalah sebagi berikut:
a. Input rangkaian menggunakan tegangan DC 12V Akumulator.
b. Output Akumulator berupa tegangan 12V.
c. Menggunakan mikrokontroler arduino ATmega 2560 sebagai pengendali.
d. Menggunakan motor DC sebagai aktuator pengaduk bijiikopi dan penggerak
burr grinder penggiling biji kopi.
e. Menggunakan motor driver L298N untuk mengendalikannmotor pengaduk dan
motor penggiling.
f. Sensor suhu Ds18b20 sebagai indikator pengukur suhu pada tabung penampung
biji kopi setelah disangrai, yang berfungsi sebagai umpan balik untuk kerja dari
kipas dan motor pengaduk.
g. Menggunakan modul arduino sebagai periperhal dan antarmuka serial.
h. Timer delay sebagai waktu kerja pada program yang dilakukan untuk proses
lamanya kerja motor DC yang akan dikontrol.
i. Menggunakan hopper berdiameter 25cm sebagai tabung penampung biji kopi
setelah dilakukan proses penyangaraian biji kopi.
22
j. Liquid crystal display (LCD) 16x2 digunakan sebagai output untuk
menampilkan suhu pada tabung pendinginnbiji kopi.
k. Kipas DC digunakan sebagaiialat bantu pendinginan biji kopi yanggtelah
disangrai.
l. Biji kopi yang digunakan dalam proses penggilingan adalah biji kopi yang telah
disangrai sebelumnya.
3.4 Tahapan-Tahapan Dalam Pembuatan Tugas Akhir
Dalam perancangan alat pendingin dan penggiling biji kopi otomatis ini dilakukan
dengan langkah-langkah kerja dalam pelaksanaanya, yaitu:
3.4.1. Studi Literatur
Study literature yang dimaksud adalah mempelajari berbagai sumber refrensi
(buku dan internet) yang berkaitan dengan pembuatan alat, yaitu seperti:
a. Mempelajari cara kerja rangkaian dari alat yang dibuat.
b. Mempelajari datasheet peralatan yang digunakan.
c. Memahami prinsip kerja proses pendingin dan penggiling biji kopi
otomatis.
Pada diagram alir Gambar 3.1 tahap-tahap perancangan alat pendingin dan penggiling
biji kopi otomatis. Diagram alir perancangan dan pembuatan tugas akhir ini digunakan
untuk memudahkan dalam sistematis pembuatan tugas akhir.

23
Gambar 3.1. Diagram Alir Pelaksanaan Tugas Akhir
3.4.2. Rancangan Perangkat Sistem
Perancangan sistem alat pendingin dan penggiling biji kopi otomatis dapat
dilihat seperti Gambar 3.2:

24
Gambar 3.2. Rancangan Perangkat Sistem
Keterangan pada Gambar 3.2:
1. Power Supply 24 V DC
2. Sensor Ds18b20
3. Kipas 12 V DC
4. Driver Motor L298N
5. Servo
6. Motor 12 V DC
7. LCD 16x2
8. Mikrokontroler Arduino ATmega2560
Perancangan perangkat sistem yang akan digunakan untuk membuat alat
penggiling kopi otomatis ini yaitu:
a. Mikrokontroler ATmega2560 yang berperan sebagai pengendali utama
untuk keseluruhan sistem, mikrokontroler ini mengendalikan motor DC

25
sebagai pengadukkdan penggiling biji kopi, motor servo, kipas, dan
LCD.
b. Motor DC berfungsi sebagai aktuator pada proses pengadukan dan
penggilingan biji kopi.
c. Motor Driver L298N merupakan module pengendali untuk mengatur
kecepatan pada motor DC yang nantinya dapat sesuaikan dengan
kebutuhan sistem.
d. Power Supply berfungsi sebagai sumber daya untuk keseluruhan sistem
alat.
e. Sensor Ds18b20 sebagai pengukur besaran suhu pada tabung penampung
biji kopi hingga stabil. Besaran suhu yang digunakan sebagai umpan
balik dari kerja sistem pendinginan biji kopi.
f. Motor servo berfungsi sebagai pembuka dan penutup pembatas anatara
tabung pendingin dan penggiling biji kopi.
g. Kipas beroperasi untuk pendingin biji kopi setelah dilakukan
penyangraian yang melebihi suhu setting point.
h. Liquid crystal display (LCD) berfungsi sebagai monitoring keadaan suhu biji
kopiipada tabung pendinginan.
26
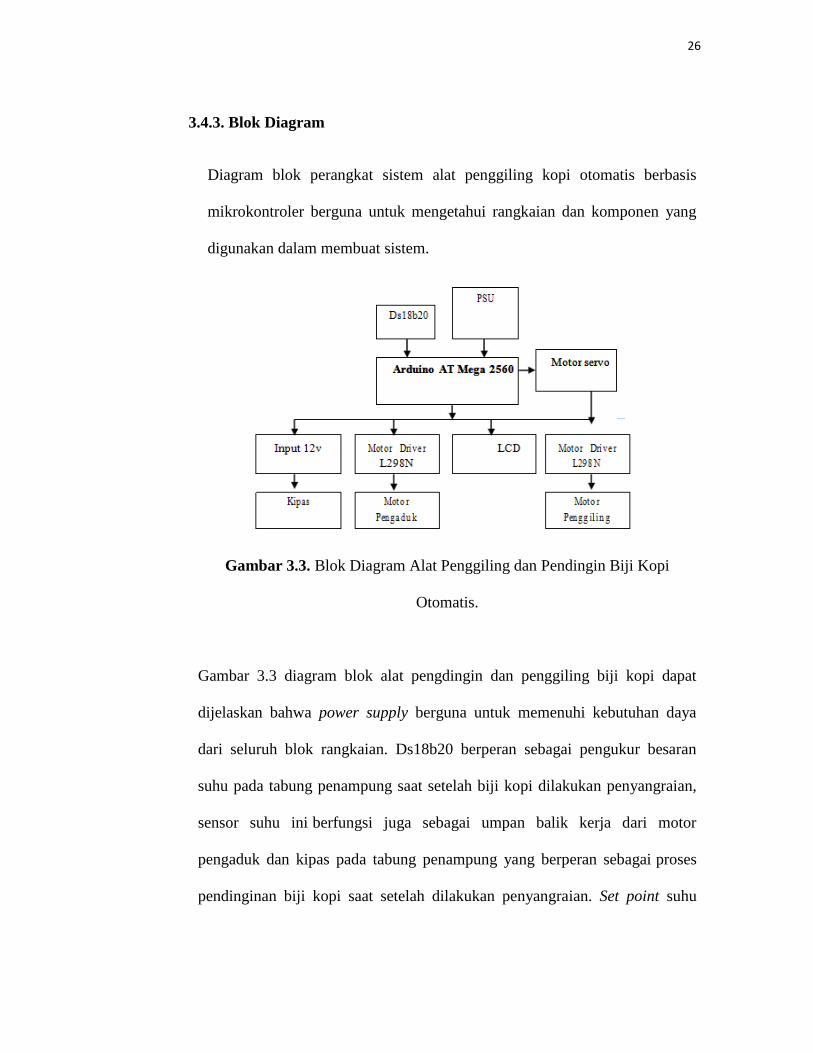
3.4.3. Blok Diagram
Diagram blok perangkat sistem alat penggiling kopi otomatis berbasis
mikrokontroler berguna untuk mengetahui rangkaian dan komponen yang
digunakan dalam membuat sistem.
Gambar 3.3. Blok Diagram Alat Penggiling dan Pendingin Biji Kopi
Otomatis.
Gambar 3.3 diagram blok alat pengdingin dan penggiling biji kopi dapat
dijelaskan bahwa power supply berguna untuk memenuhi kebutuhan daya
dari seluruh blok rangkaian. Ds18b20 berperan sebagai pengukur besaran
suhu pada tabung penampung saat setelah biji kopi dilakukan penyangraian,
sensor suhu iniiberfungsi juga sebagai umpan balik kerja dari motor
pengaduk dan kipas pada tabung penampung yang berperan sebagaiiproses
pendinginan biji kopi saat setelah dilakukan penyangraian. Set point suhu

27
akan kita tentukan sesuai dengan program yang kita input, setelah suhu
terukur maka apabila suhu melebihi dari batas normal yang ditentukan maka
kipas dan motor pengaduk akan aktif bekerja. Pada saat suhu penampungan
sudah mencapai kondisi normal maka kipas yang digunakan untuk proses
pendinginan biji kopi pada tabung penampung akan berhenti, namun motor
pengaduk akan tetap aktif dan servo pembatas juga akan aktif dengan timer
delay untuk mendorong biji kopi menuju pembatas yang akan digerakan
menggunakan motor servo. Pada proses selanjutnya biji kopi akan terdorong
jatuh menuju pembatas yang telah terbuka, setelah timer delay dari motor
pengaduk dan motor servo telah bernilai nol atau waktu habis motor
penggiling akan aktif untuk melakukan proses penggilingan biji kopi. Untuk
lebih jelasnya mengenai prinsip kerja dari perangkat sistem yang akan dibuat,
dapat dilihat pada Gambar 3.4. Flowchart perangkat sistem.

28
Gambar 3.4. Flowchart alat Pendingin dan penggiling biji kopi otomatis.
29
3.4.4. Rancangan Sistem Alat
Perancangan sistem pada alat ini berisi tentang rangkaian setiap sistem yang
akan diaplikasikan pada perancangan alat pendingin dan penggiling biji kopi
otomatis. Kemudian semua rangkaian sistem tersebut akan dirangkai secara
keseluruhan. Dalam perancangan alat pendingin dan penggiling kopi ini
dibagi dalam berbagai perancangan sebagai berikut:
A. Rangkaian Pengendali Suhu Biji Kopi
Pengendalian suhu biji kopi pada tabung penampung secara otomatis
menggunakan beberapa komponen pendukung seperti sensor suhu Ds18b20,
Motor Pengaduk, Kipas DC, dan LCD sebagi output penampil besaran suhu
yang terukur melalui sensor Ds18b20. Rancangan power supplyy yang
digunakan pada alat pendingin dan penggiling biji kopi adalah 24 V DC dan
arus maksimal sebesar 5 A. Perhitungan daya yang digunakan pada alat ini
adalah:
P = V. I ....................................................................................... (3.1)
P = 24 V x 5 A
P = 120 W
Motor pengaduk membutuhkan tegangan 24 V DC dan arus maksimal yang
digunakan adalah sebesar 5 A. Tegangan output power supply diturunkan
menggunakan modul DC to DC step down converter 5 V DC dengan arus
maksimal 3A untuk mensuplai tegangan dari mikrokontroler. Sensor Ds18b20
akan membaca suhu dari biji kopi yang telah disangrai. Sensor suhu memiliki

30
satu pin pengeluaran berupa tegangan yang dikonversikan ke dalam bentuk
digital oleh converter analog to digital (ADC) yang terdapat pada
mikrokontroler arduino Atmega 2560. Untuk kondisi suhu yang melebihi set
point 320C yang ditententukan maka sensor suhu akan menjadi umpan balik
agar kipas dan motor pengaduk aktif untuk proses penurunan suhu dari biji
kopi yang telah disangrai sebelumnya. Kecepatan motor pengaduk konstan
yaitu 75 Rpm untuk mendinginkan biji kopi dan menjatuhkan biji kopi. Berikut
pada Gambar 3.5. rangkaian pengendali suhu biji kopi:
Gambar 3.5. Rangkaian Pengendali Suhu Biji Kopi
Keterangan pada Gambar 3.5:
1. Servo
2. Arduino
3. LCD 16x2
4. Motor DC
5. Motor Driver L298N
6. Sensor Ds18b20

31
B. Rangkaian Pengendali Penggiling Biji Kopi
Pada rangkaian pengendali penggilingan biji kopi ini menggunakan motor
driver L298N sebagai pengendali dari motor DC. Penggunaan IC L298N
karena di dalamnya terdapat 4 buah motor driver yang mampu mengontrol 2
buah motor DC dengan kontrol arah CW atau CCW dan pengaturan kecepatan
motor dapat kita atur. IC L298N mampu melewatkan arus untuk motor DC
yaitu 8A untuk memberi sumber terhadap motor DC yang digunakan sebagai
aktuator penggerak biji kopi dan burr grinder yang nantinya akan
menghaluskan biji kopi. Pada penelitian ini menggunakan sumber tegangan
untuk motor penggiling adalah sebesar 24 V DC dan arus maksimal 5 A. Motor
DC penggiling menggunakan spesifikasi torsi 10 Kg.cm dengan kecepatan
maksimum 60 Rpm. Berikut ini adalah Gambar 3.7. rangkaian skematik pada
pengendali penggilingan biji kopi.
Gambar 3.6. Rangkaian Skematik Pengendali Motor Penggiling
1 2
3
32
Keterangan pada Gambar 3.6:
1. Motor DC
2. Motor Driver L298N
3. Arduino
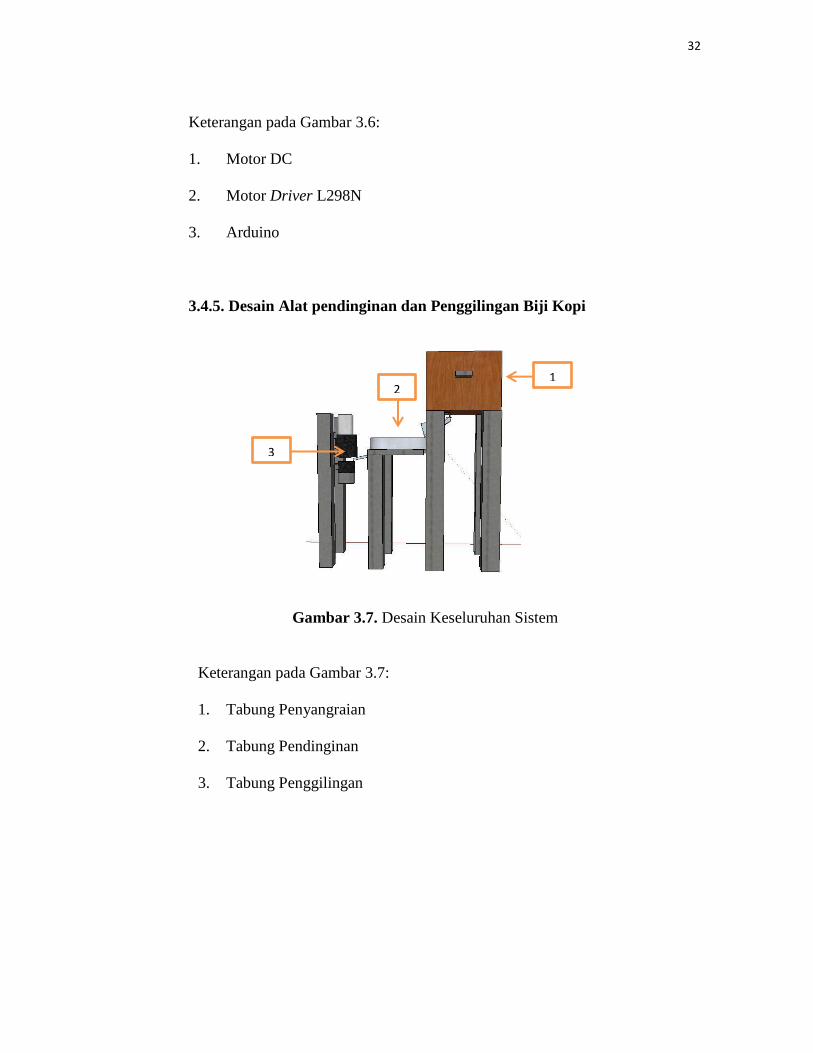
3.4.5. Desain Alat pendinginan dan Penggilingan Biji Kopi
Gambar 3.7. Desain Keseluruhan Sistem
Keterangan pada Gambar 3.7:
1. Tabung Penyangraian
2. Tabung Pendinginan
3. Tabung Penggilingan
2
3
1

33
Gambar 3.8. Desain Alat Pendingin dan Penggilingan Biji Kopi
Keterangan Pada Gambar 3.8:
1. Motor DC
2. Tabung Penggilingan
3. Tabung Penampung Bubuk Kopi
4. Pintu Keluar Biji Kopi
5. Motor Pendingin Biji Kopi
6. Tabung Pendinginan Biji Kopi
7. Motor Servo Penjatuh Biji Kopi
Gambar 3.8. Perancangan alat penggiling biji kopi otomatis ini disusun dari
beberapa bagian seperti hooper, bagian control alat, dan bagian aktuator dari
alat yang berfungsi sebagai komponen utama pada perancangan alat
penggiling biji kopi. Berikut ini adalah bagian alat pada mesin penggiling biji
kopi otomatis:
34
1. Pada perancangan alat penggiling biji kopi otomatis, motor DC akan
diletakan pada bagian belakang seperti pada gambar nomor 1 dari alat
penggiling otomatis ini.
2. Tabung Penggiling berfungsi sebagai penampung sebelum biji kopi
dilakukan proses penggilingan.
3. Pada bagian nomor 3 akan diletakan burr grinder yang akan digerakan
oleh motor DC.
4. Tabung keluaran biji kopi digunakan sebagai mengeluarkan bubuk kopi
yang telah dilakukan proses penggilingan sebelumnya.
5. Motor Pengaduk digunakan untuk mengaduk biji kopi agar dapat
didinginkan secara merata.
6. Tabung penampung yang digunakan untuk menampung biji kopi yang
telah disangrai.
7. Motor servo yang diletakan pada bagian penampung tersebut sebagai
pembatas anatara proses pendinginan biji kopi dan penggilingan biji
kopi.
3.4.6. Pengujian Perangkat Sistem Alat
Pengujian perangkat sistem alat bertujuan untuk mengetahui rancangan alat
sudah benar atau sesuai dengan yang diharapkan. Pada tahap ini akan
dilakukan pengujian disetiap blok rangkaian dan keseluruhan rangkaian.
Rancangan baik apabila alat dapat bekerja dengan baik, sehingga bisa

35
mengendalikan motor DC sebagai pengaduk dan penggiling biji kopi,
menggerakan kipas pendinginndengan umpan balik dari suhuuyang terbaca
oleh sensor. Pada perancangan alat dapat mengendalikan suhu pada biji kopi
yang telah disangrai sebelumnya.
3.4.7. Analisa
Setelah pembuatan alat selesai dan seluruh rangkaian sudah benar, maka
selanjutnya akan dilakukan analisis dan pengambilan pengujiaan data. Dari
perancangan alat tugas akhir ini yang akan dilakukan pengujian perangakat
keras yang digunakan pada perancangannalat pendingin dan penggiling biji
kopi, menganalisis waktu capai kerja alat dari pendinginan bijii kopi hingga
menjadi bubuk kopii.

55
V. SIMPULAN DAN SARAN
5.1 Simpulan
Berdasarkan hasil dan pembahasan yang telah dilakukan dapat disimpulkan bahwa:
1. Telah terealisasi alat pendingin dan penggiling biji kopi otomatis
menggunakan sensor suhu, kipas, motor driver, dan motor DC berbasis
mikrokontroler Arduino ATmega2560.
2. Pada perancangan alat pendingin dan penggiling biji kopi otomatis ini telah
terbukti sensor suhu Ds18b20 berfungsi baik dan mampu menjadi umpan
balik kerja pada proses pendinginan. Mikrokontroler Arduino telah berhasil
mengendalikan waktu capai pada motor pengaduk, motor penggiling serta
waktu keseluruhan sistem alat.
3. Pada proses pendinginan biji kopi rata-rata waktu pendinginan 431,522 detik,
pendinginan menggunakan motor pengaduk, kipas, dan tabung yang berbahan
alumunium terbukti lebih efektif dibandingkan dengan terhampar tanpa
bantuan sistem yang lain.
4. Pada pengujian penggilingan biji kopi, pengunaan burr grinder sebagai mata
pisau penggiling dan motor DC sebagai aktuator penggerak mata pisau
terbukti dapat menghaluskan biji kopi dengan 3 tingkat kehalusan kasar,
sedang, dan halus.

55
5.2 Saran
Ada beberapa saran yang dilakukan untuk pengembangan dan kemajuan alat
pendingin dan penggiling biji kopi otomatis ini, agar dapat menyempurnakan alat
tersebut.
1. Pada penelitian selanjutnya diharapkan agar memperhatikan desain dari
keseluruhan sistem alat dari mekanikal dan elektrikal yang lebih efektif.
2. Pada pembuatan alat pendingin biji kopi otomatis banyak menggunkan stainless,
maka alat ini harus dilakukan uji kehigenisan dan sterilisasi tiap part komponen
agar dapat digunakan masal.
3. Pada penelitian selanjutnya, penggunaan mata pisau penggilingan harus di
desain secara otomatis untuk mengubah tingkat kehalusan menjadi lebih efisien
dalam mengatur tingkat kehalusan biji kopi.

55
DAFTAR PUSTAKA
[1] Abasi, K 2016. Rancang Bangun Model Alat Pembuat Minuman Kopi Otomatis
Menggunakan Sensor Ultrasonik, Screw Conveyor dan Mixing Propeller
Berbasis Mikrokontroler ATmega2560. Universitas Lampung. Teknik Elektro.
[2] Ariwibowo, T 2013. Rancang Bangun Meisn Pembubuk Kopi Berkapasitas 30
Kg/Jam. Politeknik Negeri Medan. Teknik Mesin.
[3] Abdillah, Alfarizqi. 2016. Rancang Bangun Alat Penyangrai (Roasted) Kopi dan
Penggiling (Grinder) Kopi Otomatis Berbasis Mikrokontroler. Politeknik
Perkapalan Negeri Surabaya. Teknik Perkapalan.
[4] Napitulu, Samuel Haposan, Daulay. 2013. Rancang Bangun Alat Penggiling Biji
Kopi Tipe Flat Burr Mill. Universitas Sumatera Utara. Keteknikan Pertanian.
[5] Luthfi Wibowo, 2017. Wisnu Broto. Pemanfaatan Mikrokontroler Dalam
Pembuatan Kopi. Universitas Pancasila Jakarta. Teknik Elektro.
[6] Samsul, Arifin, 2014. Pemanfaatan Pulse Width Modulation Untuk Mengontrol
Motor. STMIK Malang. Teknologi dan Informasi.
[7] Nusyura, Fauzan, 2016. Pengendalian Suhu Pada Prosesor Laptop Menggunakan
Kontrol Logika Fuzzy Berbasis Mikrokontroler Arduino AT Mega 2560.
Skripsi. Universitas Brawijaya. Teknik Elektro.
[8] Ginting, Wawan, 2013. Rancang Bangun Alat Penyangrai Kopi Mekanis Tipe
Rotari. Universitas Diponegoro. Ilmu dan Teknologi Pangan.