perancangan dan pembuatan model crane … · model crane otomatis berbasis plc. ... dalamcrane...
TRANSCRIPT

PERANCANGAN DAN
PEMBUATAN PEMBUATAN
MODEL CRANE OTOMATIS
BERBASIS PLC
PERANCANGAN DAN
PEMBUATAN
MODEL CRANE OTOMATIS
BERBASIS PLC

Tujuan
Tujuan kami dalam penelitian ini yaitu untuk
menciptakan maket yang selanjutnya dapat
diterapkan pada terminal peti kemas yang
masih menggunakan operator yang berada
dalam crane untuk proses penataandalam crane untuk proses penataan
container. Selain itu kami mengharapkan
dapat mempermudah proses penataan
container, sehingga dapat meminimalisir
waktu yang dibutuhkan untuk menata
container.
Tujuan
Tujuan kami dalam penelitian ini yaitu untuk
menciptakan maket yang selanjutnya dapat
diterapkan pada terminal peti kemas yang
masih menggunakan operator yang berada
dalam crane untuk proses penataan
container. Selain itu kami mengharapkan
dapat mempermudah proses penataan
container, sehingga dapat meminimalisir
waktu yang dibutuhkan untuk menata
container.
I. Alat-alat yang kami gunakan
I.1. Motor DC
Dimana motor DC yang kami gunakan adalah motor DC magnet
permanen dengan tegangan 24 VDC .Gunanya untuk mengatur perputaran
roda.
I.2. Rotary Endcoder
Dimana rotary yang kita gunakan adalah rotary encoder. Gunanya
untuk mendeteksi perpindahan / pergerakan putaran motor.kita kehendaki.
I.3 Poros
Sebagai penghubung roda yang digerakkan motor untuk penggerak
sumbu x dan y
I.4. Magnet
Sebagai pengait untuk mengangkat model container
1.5. Bearing
Untuk memperlancar gerak crane
1.6 Rantai
Sebagai pengganti winch untuk menarik dan menurunkan magnet
pengait.
I. Alat-alat yang kami gunakan
I.1. Motor DC
Dimana motor DC yang kami gunakan adalah motor DC magnet Dimana motor DC yang kami gunakan adalah motor DC magnet Dimana motor DC yang kami gunakan adalah motor DC magnet
permanen dengan tegangan 24 VDC .Gunanya untuk mengatur perputaran permanen dengan tegangan 24 VDC .Gunanya untuk mengatur perputaran
roda.
I.2. Rotary Endcoder
Dimana rotary yang kita gunakan adalah rotary encoder. Gunanya
untuk mendeteksi perpindahan / pergerakan putaran motor.kita kehendaki.
I.3 Poros
Sebagai penghubung roda yang digerakkan motor untuk penggerak
sumbu x dan y
I.4. Magnet
Sebagai pengait untuk mengangkat model container
1.5. Bearing
Untuk memperlancar gerak crane
1.6 Rantai
Sebagai pengganti winch untuk menarik dan menurunkan magnet
pengait.
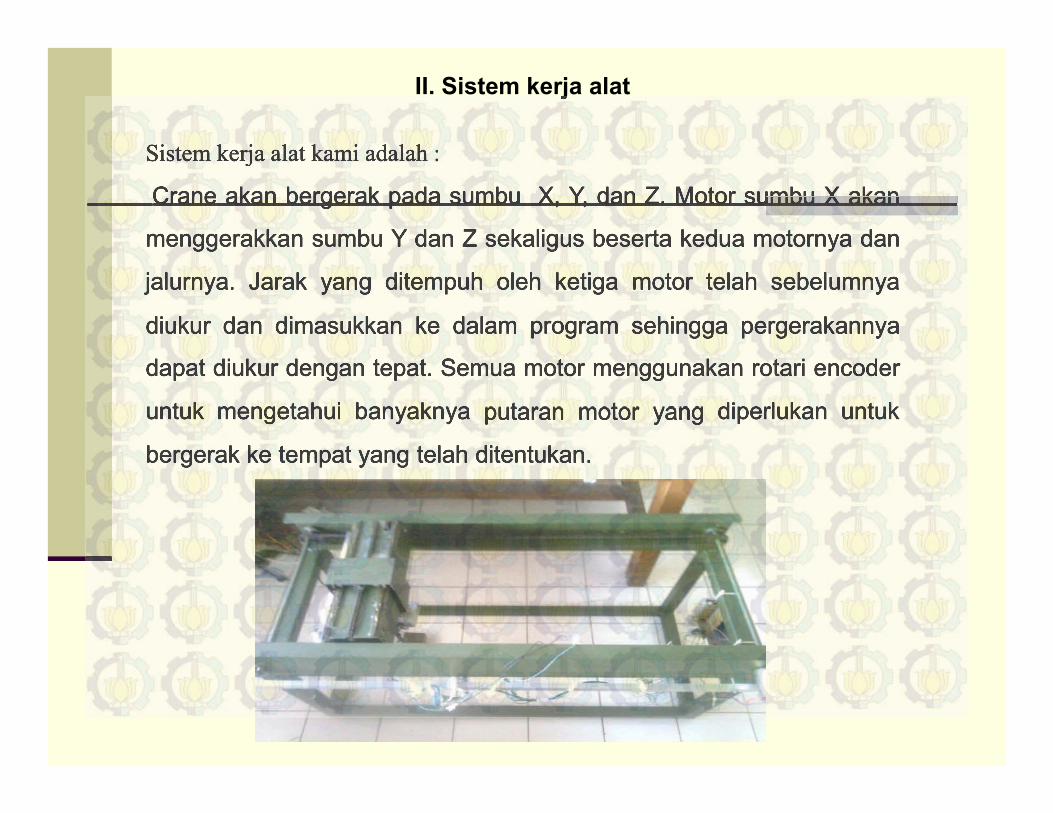
II. Sistem kerja alat
Sistem kerja alat kami adalah :
Crane akan bergerak pada sumbu X, Y, dan Z. Motor sumbu X akan
menggerakkan sumbu Y dan Z sekaligus beserta kedua motornya dan
jalurnya. Jarak yang ditempuh oleh ketiga motor telah sebelumnya
diukur dan dimasukkan ke dalam program sehingga pergerakannya
dapat diukur dengan tepat. Semua motor menggunakan rotari encoder
untuk mengetahui banyaknya putaran motor yang diperlukan untukuntuk mengetahui banyaknya putaran motor yang diperlukan untuk
bergerak ke tempat yang telah ditentukan.
II. Sistem kerja alat
Sistem kerja alat kami adalah :
Crane akan bergerak pada sumbu X, Y, dan Z. Motor sumbu X akanCrane akan bergerak pada sumbu X, Y, dan Z. Motor sumbu X akanCrane akan bergerak pada sumbu X, Y, dan Z. Motor sumbu X akan
menggerakkan sumbu Y dan Z sekaligus beserta kedua motornya dan
jalurnya. Jarak yang ditempuh oleh ketiga motor telah sebelumnya
diukur dan dimasukkan ke dalam program sehingga pergerakannya
dapat diukur dengan tepat. Semua motor menggunakan rotari encoder
untuk mengetahui banyaknya putaran motor yang diperlukan untukuntuk mengetahui banyaknya putaran motor yang diperlukan untuk
bergerak ke tempat yang telah ditentukan.

III.2. Sistem electric
Dimana penggerak utama alat ini adalah motor DC 24 volt yang telah
dipasangi rotary encoder untuk mengetahui berapa putaran motor yang diperlukan
untuk mencapai jarak yang diinginkan saat alat digerakkan.
motor DC penggerak
sumbu x dan y rotary encoder
III.2. Sistem electric
Dimana penggerak utama alat ini adalah motor DC 24 volt yang telah
dipasangi rotary encoder untuk mengetahui berapa putaran motor yang diperlukan
untuk mencapai jarak yang diinginkan saat alat digerakkan.
motor DC penggerak
sumbu x dan y rotary encoder
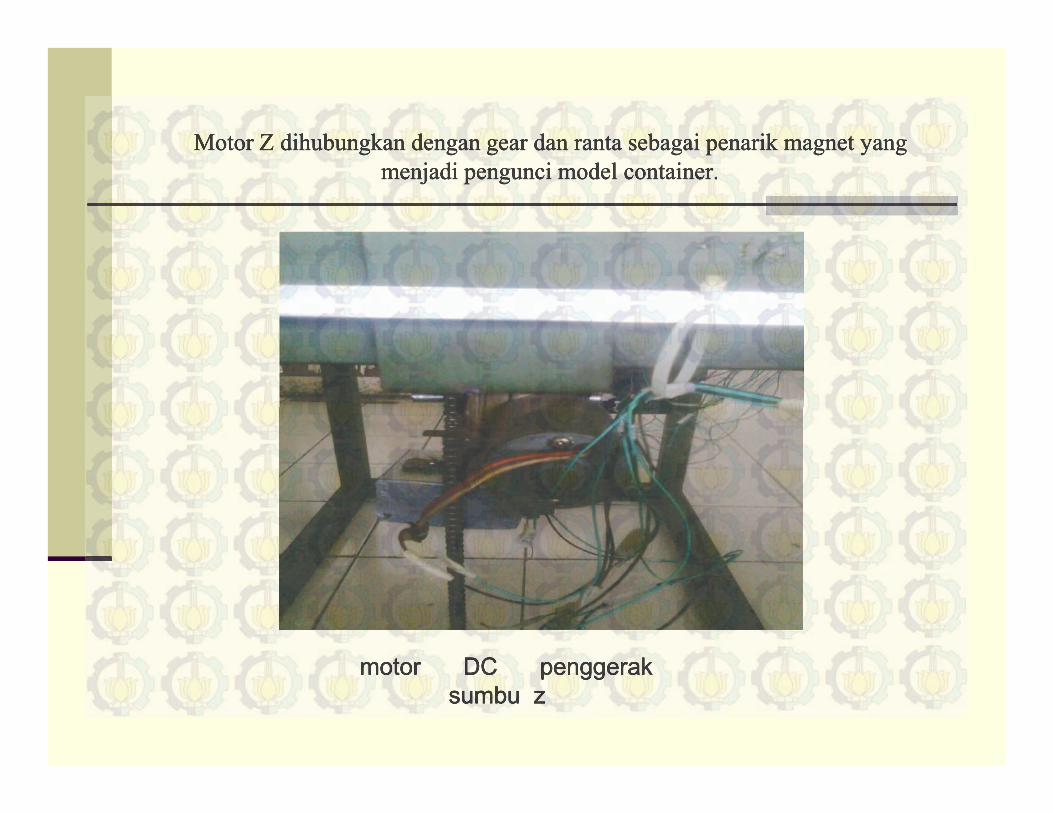
Motor Z dihubungkan dengan gear dan ranta sebagai penarik magnet yang
menjadi pengunci model container.
motor DC penggerak
sumbu z
Motor Z dihubungkan dengan gear dan ranta sebagai penarik magnet yang
menjadi pengunci model container.
motor DC penggerak
sumbu z
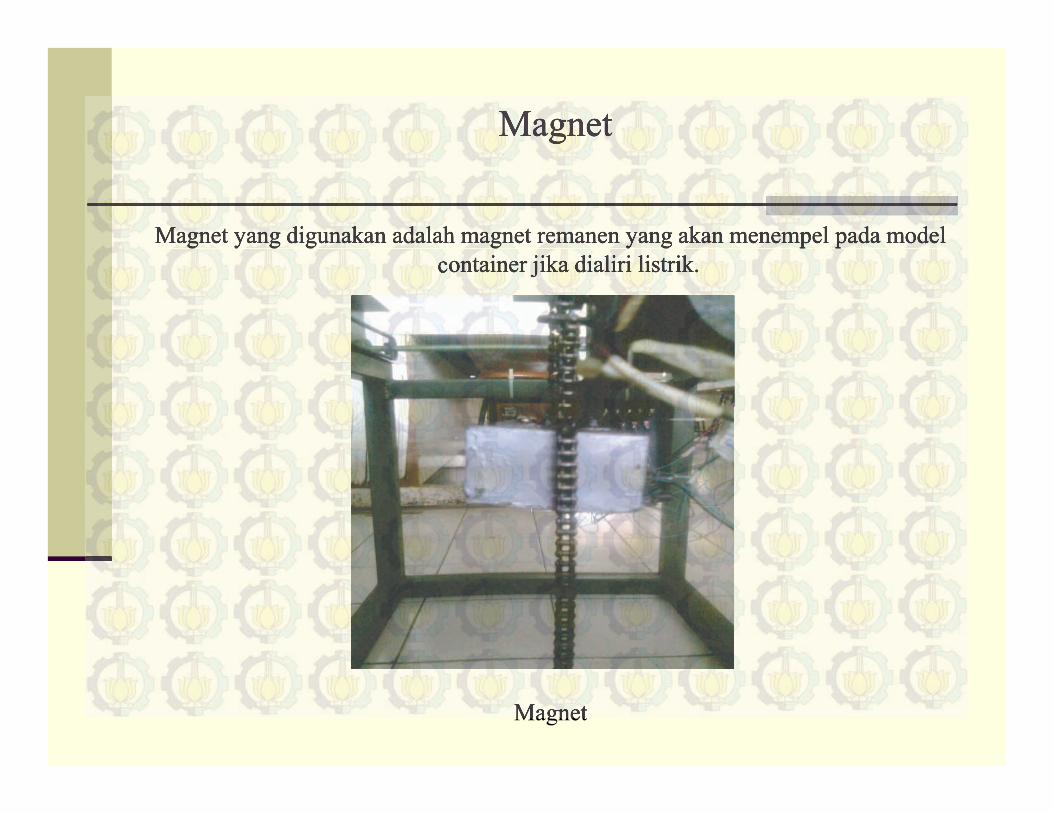
Magnet
Magnet yang digunakan adalah magnet remanen yang akan menempel pada model
container jika dialiri listrik.
Magnet
Magnet
Magnet yang digunakan adalah magnet remanen yang akan menempel pada model
container jika dialiri listrik.
Magnet

Lintasan gerak sumbuX
Lintasan gerak sumbu X menggunakan gear dan rantai yang telah dikuncikan pada
dudukan motor . Motor dan rantai ini dihubungkan dengan poros dan motor.
Lintasan gerak sumbu Y
Lintasan gerak sumbuX
Lintasan gerak sumbu X menggunakan gear dan rantai yang telahLintasan gerak sumbu X menggunakan gear dan rantai yang telahLintasan gerak sumbu X menggunakan gear dan rantai yang telahLintasan gerak sumbu X menggunakan gear dan rantai yang telah dikuncikan padadikuncikan padadikuncikan pada
dudukan motor . Motor dan rantai ini dihubungkan dengan poros dan motor.dudukan motor . Motor dan rantai ini dihubungkan dengan poros dan motor.
Lintasan gerak sumbu Y
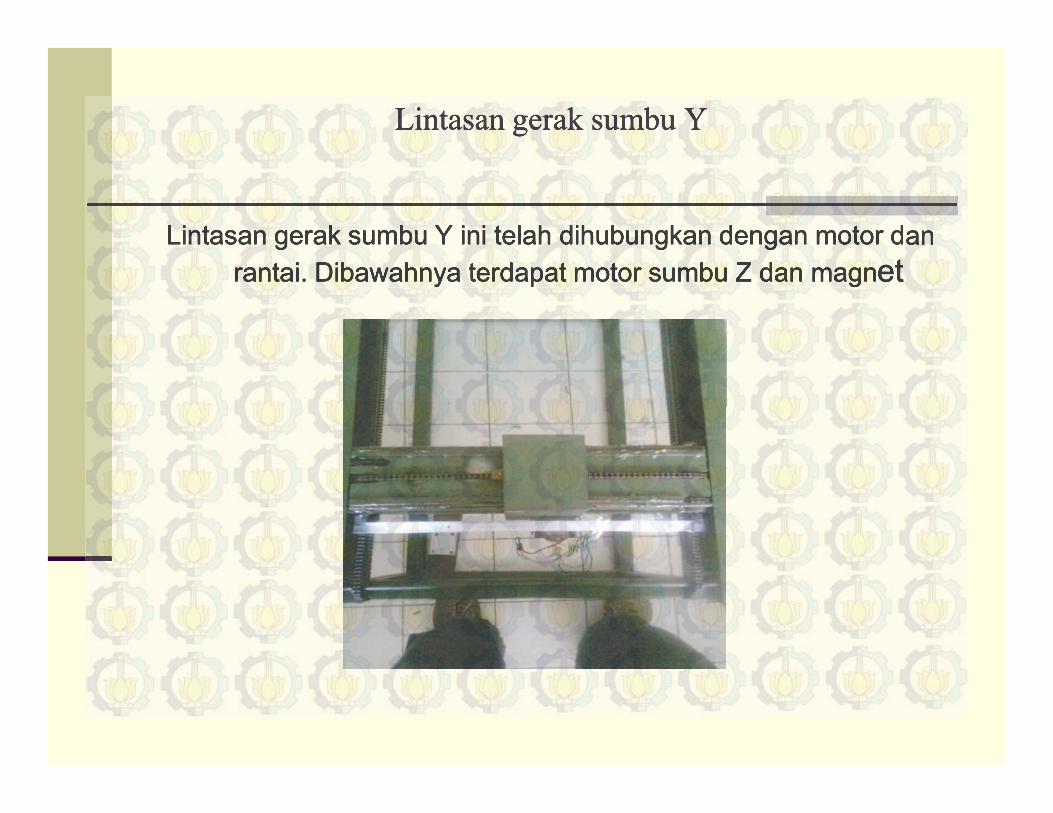
Lintasan gerak sumbu Y
Lintasan gerak sumbu Y ini telah dihubungkan dengan motor dan
rantai. Dibawahnya terdapat motor sumbu Z dan magnet
Lintasan gerak sumbu Y
Lintasan gerak sumbu Y ini telah dihubungkan dengan motor dan
rantai. Dibawahnya terdapat motor sumbu Z dan magnet

PLC ( Programable Logic Control)
PLC sebagai penghubung dan pengendali gerak crane. PLC ini
dihubungkan dengan komputer. PLC yang digunakan adalah PLC tipe
AB ( Allen Bradley ).
PLC Allen Bradley
PLC ( Programable Logic Control)
PLC sebagai penghubung dan pengendali gerak crane. PLC inPLC sebagai penghubung dan pengendali gerak crane. PLC inPLC sebagai penghubung dan pengendali gerak crane. PLC inii
dihubungkan dengan komputer. PLC yang digunakan adalah PLC tipedihubungkan dengan komputer. PLC yang digunakan adalah PLC tipe
AB ( Allen Bradley ).
PLC Allen Bradley
Kabel USB to RS 232
Kabel USB to RS 232 digunakan sebagai penghubung antara komputer
dengan PLC.
Kabel USB to RS 232
Kabel USB to RS 232
Kabel USB to RS 232 digunakan sebagai penghubung antara kKabel USB to RS 232 digunakan sebagai penghubung antara kKabel USB to RS 232 digunakan sebagai penghubung antara komputeromputeromputer
dengan PLC.
Kabel USB to RS 232
Kesimpulan
Perancangan dan pembuatan model crane otomatis ini
menggunakan motor DC sebagai penggerak utamanya dan PLC
sebagai pengendali arah dan koordinat geraknya.
Untuk melakukan penataan model container yang tepat
dan cepat maka diperlukan :
1. Pemetaan pada koordinat yang telah ditentukan jadi titik awal
pengambilan container dan titik akhir penempatan container
telah ditentukan terlebih dahulu hal ini agar operator mampu
menentukan berapa putaran motor X, Y, dan Z yang diperlukanmenentukan berapa putaran motor X, Y, dan Z yang diperlukan
untuk mencapai koordinat yang diinginkan.
2. Program yang PLC sebagai pengendali utama crane yang
tepat.
Hal ini mampu meminimalisir waktu yang dibutuhkan untuk menata
container.
Kesimpulan
Perancangan dan pembuatan model crane otomatis ini
menggunakan motor DC sebagai penggerak utamanya dan PLC
sebagai pengendali arah dan koordinat geraknya.sebagai pengendali arah dan koordinat geraknya.sebagai pengendali arah dan koordinat geraknya.
Untuk melakukan penataan model container yang tepat
dan cepat maka diperlukan :
1. Pemetaan pada koordinat yang telah ditentukan jadi titik awal
pengambilan container dan titik akhir penempatan container
telah ditentukan terlebih dahulu hal ini agar operator mampu
menentukan berapa putaran motor X, Y, dan Z yang diperlukanmenentukan berapa putaran motor X, Y, dan Z yang diperlukan
untuk mencapai koordinat yang diinginkan.
2. Program yang PLC sebagai pengendali utama crane yang
tepat.
Hal ini mampu meminimalisir waktu yang dibutuhkan untuk menata
container.

Lampiran
Alat tampak keseluruhanAlat tampak keseluruhan
Alat tampak depan
Gambar alat Alat tampak atas
Lampiran
Alat tampak keseluruhanAlat tampak keseluruhan
Alat tampak depan