pemeruman bab1.pdf
DESCRIPTION
soundingTRANSCRIPT
1
BAB I
PENDAHULUAN
I.1 Latar Belakang
Pemetaan laut, khususnya pemetaan batimetri merupakan keperluan mendasar
dalam rangka penyediaan informasi spasial untuk kegiatan, perencanaan dan
pengambilan keputusan yang berkaitan dengan informasi di bidang kelautan
(Soeprapto, 2001).
Seiring dengan perkembangan zaman, pemetaan batimetri dapat dilakukan
dengan beberapa metode dan teknologi. Penerapan teknologi akustik dasar laut terus
berkembang untuk tujuan ilimiah antara lain digunakan untuk mempelajari proses
perambatan suara pada medium air yang mampu memberikan informasi karakteristik
dasar perairan, komunikasi dan penentuan posisi di perairan. Hydro-acoustic
merupakan suatu teknologi pendeteksian bawah air dengan menggunakan perangkat
akustik (acoustic instrument), di antaranya Echosounder, Fish Finder, dan Sonar
(Hermawan, 2009). Kedalaman hasil pengukuran dengan echosounder adalah jarak
yang diukur dari alat yang ada di bawah kapal terhadap titik di bawah laut,
sedangkan kedalaman laut dinyatakan sebagai jarak vertikal antara suatu bidang
referensi tertentu dengan sebuah titik di dasar laut (Anonim, 2013). Dalam hal ini
bidang referensi yang biasa digunakan adalah muka surutan (Chart Datum) yang
ditentukan berdasarkan hasil pengamatan pasang surut. Saat ini teknologi akustik
berkembang semakin signifikan dengan dikembangkannya variasi yang lebih maju,
hal ini tergantung dari area yang ingin dipetakan dan tujuan dari pemetaan yang akan
dilakukan.
Terdapat tiga jenis sistem Echosounder yang umum dikenal yaitu Singlebeam
Echosounder, Multi Transducer Echosounder dan Multibeam Echosounder
(Parikesit, 2008). Metode akustik menggunakan alat Multibeam Echosounder
memiliki kelebihan yaitu sangat cocok untuk diaplikasikan untuk daerah yang luas
serta memiliki kedalaman yang cukup dalam karena mempunyai resolusi yang tinggi.
Tetapi di sisi lain juga mempunyai kelemahan, yaitu besarnya biaya yang dibutuhkan
2
dalam pelaksanaannya, dimana untuk pelaksanaan pemetaan batimetri harus dibawa
dengan wahana berupa kapal yang memiliki spesifikasi khusus dan ukurannya cukup
besar. Oleh sebab itu maka penggunaan alat Multibeam Echosounder untuk
pemetaan batimetri seperti danau, waduk dan sungai dinilai kurang efektif.
Solusi untuk pemecahan permasalahan pemetaan batimetri untuk wilayah
seperti danau, waduk dan sungai adalah digunakan alat Singlebeam Echosounder.
Salah satu jenis Singlebeam Echosounder (SBES) yang ada dan sering digunakan
adalah Echosounder Odom Hydrotrac II. Alat ini khusus dirancang untuk wahana
kapal yang berukuran kecil dan kondisi kapal yang keras. Sistem Singlebeam
Echosounder biasanya terdiri dari catu daya, seperangkat perekam data, transducer
(pemancar) dan hidrofon (penerima). Singlebeam Echosounder biasanya juga
dilengkapi dengan GPS internal yang digunakan untuk penentuan posisi dan display
yang menampilkan printer chart paper untuk menampilkan gambaran profil dasar
perairan yang dikonversi dari data kedalaman. Walau demikian, biaya yang harus
dikeluarkan masih dinilai cukup mahal. Selain itu kerapatan titik serta ketelitian peta
batimetri yang ingin dihasilkan juga mempengaruhi mahalnya biaya yang
dibutuhkan, karena hal ini berpengaruh pada lamanya waktu pengukuran yang
dibutuhkan. Berdasarkan hal tersebut maka diperlukan beberapa alternatif alat survei
hidrografi yang lebih efisien untuk memberikan informasi spasial secara teliti.
Salah satu tipe alternatif Singlebeam Echosounder dengan biaya rendah dan
sering digunakan adalah Fish Finder. Fish Finder yang paling banyak digunakan
adalah GARMIN MAP Sounder 178 C. Alat ini dirancang khusus untuk perairan
dangkal dan tidak terlalu luas seperti waduk, danau, dan sungai. Sebetulnya Fish
Finder merupakan alat bantu nelayan untuk mencari ikan. Alat ini terdiri dari display
berupa monitor dan transducer yang ditenggelamkan ke laut, transducer digunakan
untuk mendeteksi kedalaman dan juga keberadaan ikan di laut dan hasilnya akan
ditampilkan ke layar. Dengan alat ini diharapkan nelayan lebih mudah dalam
mencari ikan sehingga bisa meningkatkan hasil penangkapan ikan. Ternyata
disamping digunakan untuk mencari ikan, alat ini seringkali digunakan untuk
mengukur kedalaman dan mengetahui kondisi topografi dasar laut dengan
menampilkan kontur kedalaman secara rinci. Selama ini alat Fish Finder GARMIN
MAP Sounder 178 C tersebut diasumsikan menghasilkan data kedalaman dengan
3
ketelitian rendah dibandingkan alat Singlebeam Echosounder ODOM Hydrotrac II.
Meskipun demikian perlu untuk dibandingkan data hasil pengukuran batimetri
menggunakan ke dua alat tersebut. Harapannya perbandingan tersebut dapat
memberikan gambaran apakah kualitas data yang dihasilkan oleh alat Fish Finder
GARMIN MAP Sounder 178 C dan Singlebeam Echosounder ODOM Hydrotrac II
memang berbeda secara signifikan atau tidak. Pembuktian secara ilmiah mengenai
perbedaan kualitas data pengukuran menggunakan Fish Finder GARMIN MAP
Sounder 178 C dan Singlebeam Echosounder ODOM Hydrotrac II belum banyak
dilakukan.
Pengujian bukan hanya sebatas pada pengujian signifikansi perbedaan antara
kedua alat, tetapi perlu juga dilakukan pengujian yang merujuk pada standardisasi
yang berlaku. Dalam hal ini standardisasi pengukuran kedalaman yang digunakan
merujuk kepada IHO SP-44 dan SNI 7646-2010.
I.2 Rumusan Masalah
Berdasarkan penelitian yang dilakukan, dapat dirumuskan beberapa
permasalahan yaitu :
1. Bagaimana hasil perbandingan data pengukuran batimetri menggunakan
alat Fish Finder GARMIN MAP Sounder 178 C dan Singlebeam
Echosounder ODOM Hydrotrac II ?
2. Bagaimana kualitas data hasil pengukuran batimetri menggunakan alat Fish
Finder GARMIN MAP Sounder 178 C dan Singlebeam Echosounder
ODOM Hydrotrac II ?
I.3 Tujuan Penelitian
Pelaksanaan dari penelitian ini bertujuan untuk :
1. Menganalisis perbandingan data hasil pengukuran batimetri menggunakan
alat Fish Finder GARMIN MAP Sounder 178 C dan Singlebeam
Echosounder ODOM Hydrotrac II.
4
2. Menganalisis ketelitian data hasil pengukuran batimetri menggunakan alat
Fish Finder GARMIN MAP Sounder 178 C dan Singlebeam Echosounder
ODOM Hydrotrac II.
I.4 Manfaat Penelitian
Penelitian ini diharapkan dapat memberikan manfaat sebagai berikut :
1. Diharapkan alat Fish Finder GARMIN MAP Sounder 178 C dapat menjadi
alternatif untuk membantu pekerjaan survei batimetri yang mengacu pada
standardisasi SNI 7646-2010 dan IHO SP-44 tahun 2008.
2. Memberikan gambaran tentang perbedaan kualitas data pengukuran
kedalaman yang dihasilkan oleh alat Fish Finder GARMIN MAP Sounder
178 C dan Singlebeam Echosounder ODOM Hydrotrac II.
I.5 Batasan Masalah
Batasan masalah untuk penelitian ini adalah :
1. Alat Singlebeam Echosounder yang digunakan adalah Echosounder Odom
Hydrotrac II, sedangkan Fish Finder yang digunakan adalah GARMIN
MAP Sounder 178 C. Kondisi kedalaman area yang diukur oleh ke dua alat
tersebut adalah 1 – 40 meter.
2. Lokasi penelitian adalah Waduk Sermo di Dusun Sermo, Desa Hargowilis,
Kecamatan Kokap, Kabupaten Kulon Progo, Yogyakarta.
3. Orde ketelitian yang digunakan merujuk kepada SNI 7646-2010 tentang
survei hidrografi menggunakan Singlebeam Echosounder dan IHO
Standards Of Hydrographic Surveys SP-44 tahun 2008 adalah level 1b.
4. Data yang digunakan untuk penelitian adalah data hasil pengukuran
batimetri menggunakan alat Singlebeam Echosounder Odom Hydrotrac II
dan Fish Finder GARMIN MAP Sounder 178 C. Pemasangan transducer
dilakukan pada posisi berdampingan dan berseberangan sehingga berada di
posisi horizontal (X,Y) yang sama.

5
5. Metode penentuan posisi horizontal (X,Y) yang digunakan adalah metode
penentuan posisi secara absolut dengan memanfaatkan GPS internal dari
Fish Finder.
6. Ke dua alat ukur kedalaman yang digunakan (Singlebeam Echosounder dan
Fish Finder) menggunakan sebuah GPS yang saling terintegrasi dengan
baik.
7. Software yang digunakan untuk perencanaan, akusisi data, dan navigasi
dalam pemeruman serta editing adalah Hydropro Version 2.40.
8. Analisis ketelitian dan kualitas data hasil pengukuran batimetri mengacu
pada SNI 7646:2010 dan IHO SP-44 tahun 2008.
9. Analisis perbandingan hasil dilakukan dengan cara mencari beda
kedalaman dari keseluruhan hasil pengukuran batimetri pada titik yang
sama antara alat Echosounder Odom Hydrotrac II dan Fish Finder
GARMIN MAP Sounder 178C. Kemudian dilakukan uji statistik dengan T-
student test untuk tingkat kepercayaan 95%.
10. Uji kualitas data yang digunakan merujuk kepada IHO SP-44 tahun 2008
dengan memperbandingkan data hasil pengukuran titik pemeruman yang
saling berpotongan pada lajur utama dan lajur silang.
I.6 Tinjauan Pustaka
Penentuan posisi pada survei batimetri dapat menggunakan prinsip optik yaitu
dapat menggunakan teodolit dengan cara melakukan pemotongan ke muka ataupun
pemotongan kebelakang, dimana berkas cahaya pada garis bidik instrumen
menggantikan garis-garis pengamatan. Penggunaan metode optik ini menuntut target
yang di bidik harus terlihat oleh pengamat. Faktor-faktor dominan yang dapat
mempengaruhi kemampuan pengamat untuk melihat target adalah kelengkungan
bumi dan refraksi, sehingga umumnya instrumen optik memiliki keterbatasan
jangkauan pandang. Berdasarkan hal tersebut maka metode ini hanya dapat
digunakan untuk daerah yang sempit pada permukaan bumi yang dapat dinggap
bidang datar. Metode penentuan posisi yang lain yaitu dengan memanfaatkan

6
gelombang elektromagnetik. Metode pengukuran jarak ini tidak dilakukan secara
langsung, melainkan didapatkan dengan mengenali laju gelombang elektromagnetik
pada medium atmosfer dan selang waktu saat gelombang tersebut dipancarkan
sampai dengan di terima oleh target. Instrumen yang mengunakan prinsip kerja ini
adalah sistem satelit navigasi GPS. GPS dalam survei batimetri digunakan untuk
penentuan posisi titik pemeruman (Poerbandono, dkk., 2005).
Penentuan posisi secara absolut merupakan metode yang paling mendasar dari
GPS. Pada metode ini hanya diperlukan satu buah receiver GPS. Dalam penentuan
posisi secara metode absolut ini menggunakan data pseudorange pada suatu epok,
dimana ada 4 parameter yang harus ditentukan yaitu parameter koordinat ( X,Y,Z )
dan parameter kesalahan jam receiver GPS, sehingga diperlukan minimal 4 buah
satelit yang harus ditangkap oleh receiver. Data yang dihasilkan secara absolut pada
satu epok menghasilkan data yang masih kecil ketelitiannya. Hal ini disebabkan data
hasil pengamatan masih mengandung kesalahan akibat ionosfer dan troposfer.
Pereduksian kesalahan akibat ionosfer dan troposfer dapat dilakukan dengan
penentuan posisi secara differential. Dalam penentuan posisi secara differential,ada
beberapa aplikasi yang menuntut informasi posisi secara real-time. Untuk melayani
aplikasi-aplikasi tersebut, saat ini tersedia sistem yang dikenal dengan DGPS
(Differential GPS). Sistem ini umumnya digunakan untuk penentuan posisi obyek
yang bergerak seperti kapal saat melakukan survei batimetri. Untuk merealisasikan
tuntunan real timenya,maka monitor station harus mengirimkan koreksi differential
ke pengguna secara real time dengan menggunakan sistem komunikasi data tertentu.
Koreksi differential ini dapat berupa koreksi pseudorange (seperti RTCM SC-104)
maupun koreksi koordinat. Dengan adanya koreksi differential maka koordinat yang
didapatkan memiliki ketelitian posisi horizontal yang relatif lebih tinggi
dibandingkan dengan metode absolut (Abidin, 2000).
Penelitian mengenai penentuan posisi horizontal pada alat Echosounder tipe
Fishfinder GARMIN MAP Sounder 178C telah dilakukan oleh Mahbub (2011).
Penelitiannya telah mencoba memodifikasi Fish Finder yang awalnya menggunakan
metode absolut dirubah menjadi differential dengan data yang dikoreksikan dengan
menggunakan NTRIP (Networked Transport of RTCM via Internet Protocol), yang
mana NTRIP tersebut terhubung dengan stasiun GNSS CORS. Kemudian dilakukan

7
perbandingan seberapa besar pergeseran koordinat titik-titik sampel pemeruman
antara metode absolut dan differential. Dampak yang ditimbulkan dari adanya
perbedaan metode pengukuran tersebut adalah perbedaan bentuk dari permukaan
waduk sermo. Hal ini dapat terlihat pada hasil cut and fill antara DTM (Digital
Terrain Model) yang terbentuk dengan menggunakan metode differential dengan
DTM yang terbentuk dengan menggunakan metode absolute yang memiliki
perbedaan yang cukup signifikan.
Penelitian penggunaan alat Odom Hydrotrac II telah dilakukan oleh Septiyadi
(2013). Penelitian tersebut berhasil mengkombinasikan alat Odom Hydrotrac II
dengan Software Hydropro version 2.40 menjadi satu unit sistem untuk pengukuran
survei batimetri. Kemudian dari data hasil pengukuran tersebut dilakukan uji statistik
untuk tingkat kepercayaan 95% dan diperoleh nilai mean error sebesar 0,036 m, nilai
standard deviation sebesar ±0,195 m dan nilai to sebesar 1,16, sehingga dapat
dinyatakan bahwa data kedalaman yang diperoleh masuk toleransi dengan tingkat
kepercayaan 95% (-1,96 < to < 1,96).
Berdasarkan uraian dan penelitian yang telah dilakukan tersebut, penulis
mencoba untuk mengkoneksikan alat Fish Finder GARMIN MAP Sounder 178C
dengan Software Hydropro. Selama ini software Hydropro hanya diketahui dapat
dikoneksikan dengan alat Odom Hydrotrac II saja. Hal ini dimaksudkan agar data
kedalaman dan posisi horizontal (X,Y) dari alat Fish Finder dalam format NMEA
secara real time terkirim ke software Hydropro. Dari proses ini akan didapatkan data
kedalaman dari alat Odom Hydrotrac II dan Fishfinder GARMIN MAP Sounder 178
C dalam posisi yang sama. Kemudian dilakukan uji kualitas data dan analisis
perbandingan data hasil pengukuran batimetri menggunakan alat Odom Hydrotrac II
dan Fishfinder GARMIN MAP Sounder 178 C yang merujuk kepada SNI 7646:2010
dan IHO SP-44 tahun 2008.
8
I.7 Landasan Teori
1.7.1 Orde Ketelitian Survei Hidrografi
Menurut standar teknis pelaksanaan survei hidrografi terdapat klasifikasi
derajat ketelitian yang dibedakan menjadi beberapa orde ketelitian sebagai berikut
(SNI 74646:2010) :
a. Orde khusus
Orde khusus survei hidrografi mendekati standar ketelitian survei rekayasa dan
digunakan secara terbatas di daerah-daerah kritis dimana kedalaman di bawah laut
sangat minim dan di dalam hal ini karakteristik dasar airnya berpotensi
membahayakan kapal. Daerah-daerah kritis tersebut ditentukan secara langsung oleh
instansi yang bertanggung jawab di dalam masalah kualitas survei. Sebagai contoh
ialah pelabuhan-pelabuhan tempat sandar dan alur masuknya. Semua sumber
kesalahan harus dibuat minimal.
Orde khusus memerlukan penggunaan yang berkaitan dengan side scan sonar,
multi transducer arrays atau multibeam echosounder dengan resolusi tinggi dengan
jarak antar lajur perum yang rapat untuk mendapatkan gambaran dasar air 100%.
Harus pula diyakinkan bahwa setiap benda dengan ukuran lebih besar dari 1 meter
persegi dapat terlihat oleh peralatan perum yang digunakan. Penggunaan side scan
sonar dan multibeam echosounder mungkin diperlukan di daerah-daerah di dalam
hal ini benda-benda kecil dan rintangan bahaya mungkin ditemukan atau survei
untuk keperluan investigasi.
b. Orde satu
Orde satu survei hidrografi diperuntukkan bagi pelabuhan-pelabuhan, alur
pendekat, haluan yang dianjurkan, alur navigasi dan daerah pantai dengan lalu lintas
komersial yang padat di dalam hal ini kedalaman di bawah laut memiliki luas cukup
memadai dan kondisi geofisik dasar lautnya tidak begitu membahayakan kapal
(misalnya lumpur atau pasir). Survei orde satu berlaku batas di daerah dengan
kedalaman kurang dari 100 meter. Meskipun persyaratan pemeriksaan dasar laut
tidak begitu ketat jika dibandingkan orde khusus, namun pemeriksaan dasar laut
secara menyeluruh tetap diperlukan di daerah-daerah di dalam hal ini karakteristik
dasar laut dan resiko adanya rintangan berpotensi membahayakan kapal. Pada
9
daerah-daerah yang diteliti tersebut, harus diyakinkan bahwa untuk kedalaman
sampai dengan 40 meter benda-benda dengan ukuran lebih besar dari 2 meter
persegi, atau pada kedalaman lebih dari 40 meter, benda-benda dengan ukuran 10%
dari kedalaman harus dapat digambarkan oleh peralatan perum yang digunakan.
c. Orde dua
Orde dua survei hidrografi diperuntukkan di daerah dengan kedalaman kurang
dari 200 meter yang tidak termasuk di dalam orde khusus maupun orde satu, dan di
dalam hal ini gambaran batimetri secara umum sudah mencukupi untuk meyakinkan
bahwa tidak terdapat rintangan di dasar laut yang akan membahayakan tipe kapal
yang lewat atau bekerja di daerah tersebut. Hal ini merupakan kriteria yang
penggunaannya di bidang kelautan, sangat beraneka ragam, di dalam hal ini orde
hidrografi yang lebih tinggi tidak dapat diberlakukan. Pemeriksaan dasar laut
mungkin diperlukan pada daerah-daerah di dalam hal ini karakteristik dasar air dan
resiko adanya rintangan berpotensi membahayakan kapal.
d. Orde tiga
Orde tiga survei hidrografi diperuntukkan untuk semua area yang tidak
tercakup oleh orde khusus, orde satu dan dua pada kedalaman lebih besar dari 200
meter.
Orde ketelitian survei di atas merupakan rujukan dari SNI 7646:2010 yang
mengacu pada IHO SP-44 edisi ke 4 tahun 1998 dan IHO SP-32 edisi ke 5 tahun
1994. Sedangkan IHO telah menerbitkan IHO Standards Of Hydrographics Surveys
terbaru yaitu IHO SP-44 edisi ke 5 tahun 2008. IHO SP-44 tahun 2008 diterbitkan
karena munculnya teknologi multibeam dan LIDAR (Anonim, 2008). Oleh karena itu
terdapat pembaharuan pada pembagian orde ketelitian survei yaitu menjadi orde
khusus, 1a, 1b, dan 2.
Perubahan mendasar yang terdapat pada IHO edisi ke 5 tahun 2008 adalah pada
orde 1a pencarian dasar laut secara penuh diperlukan dan pada orde 1b tidak
diperlukan. Kemudian terjadi penghapusan orde 3 karena dianggap sama dengan
orde 2 (IHO SP-44 edisi ke 5 tahun 2008).
10
1.7.2 Lajur Pemeruman
Berdasarkan fungsinya lajur pemeruman dapat diklasifikasikan menjadi tiga
macam (Soeprapto, 2001) yaitu lajur utama, lajur silang, lajur tambahan/investigasi.
I.7.2.1 Lajur perum utama
Lajur perum utama adalah lajur perum yang direncanakan sedemikian rupa
sehingga seluruh daerah survei dapat tercakup dan dapat tergambarkan dasar
perairannya (Soeprapto, 2001). Ketentuan untuk pembuatan lajur perum utama telah
diatur pada IHO (International Hydrography Organization) dalam IHO Standards Of
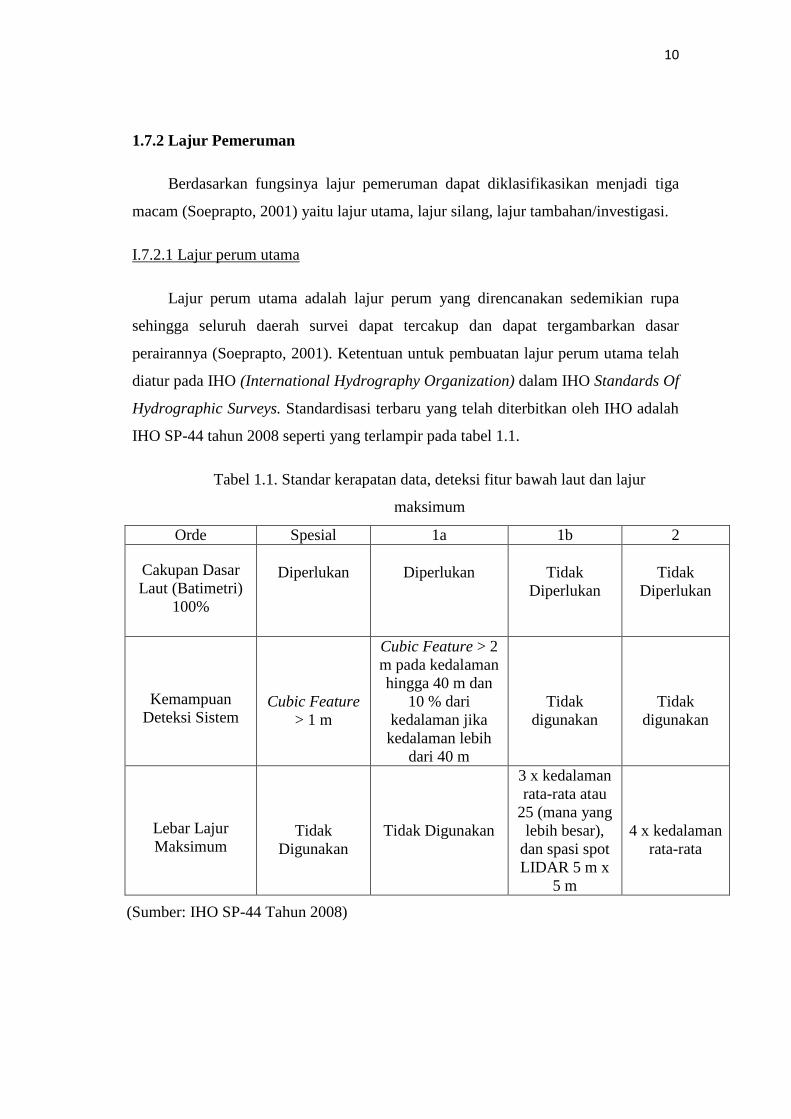
Hydrographic Surveys. Standardisasi terbaru yang telah diterbitkan oleh IHO adalah
IHO SP-44 tahun 2008 seperti yang terlampir pada tabel 1.1.
Tabel 1.1. Standar kerapatan data, deteksi fitur bawah laut dan lajur
maksimum
Orde Spesial 1a 1b 2
Cakupan Dasar
Laut (Batimetri)
100%
Diperlukan
Diperlukan
Tidak
Diperlukan
Tidak
Diperlukan
Kemampuan
Deteksi Sistem
Cubic Feature
> 1 m
Cubic Feature > 2
m pada kedalaman
hingga 40 m dan
10 % dari
kedalaman jika
kedalaman lebih
dari 40 m
Tidak
digunakan
Tidak
digunakan
Lebar Lajur
Maksimum
Tidak
Digunakan
Tidak Digunakan
3 x kedalaman
rata-rata atau
25 (mana yang
lebih besar),
dan spasi spot
LIDAR 5 m x
5 m
4 x kedalaman
rata-rata
(Sumber: IHO SP-44 Tahun 2008)

11
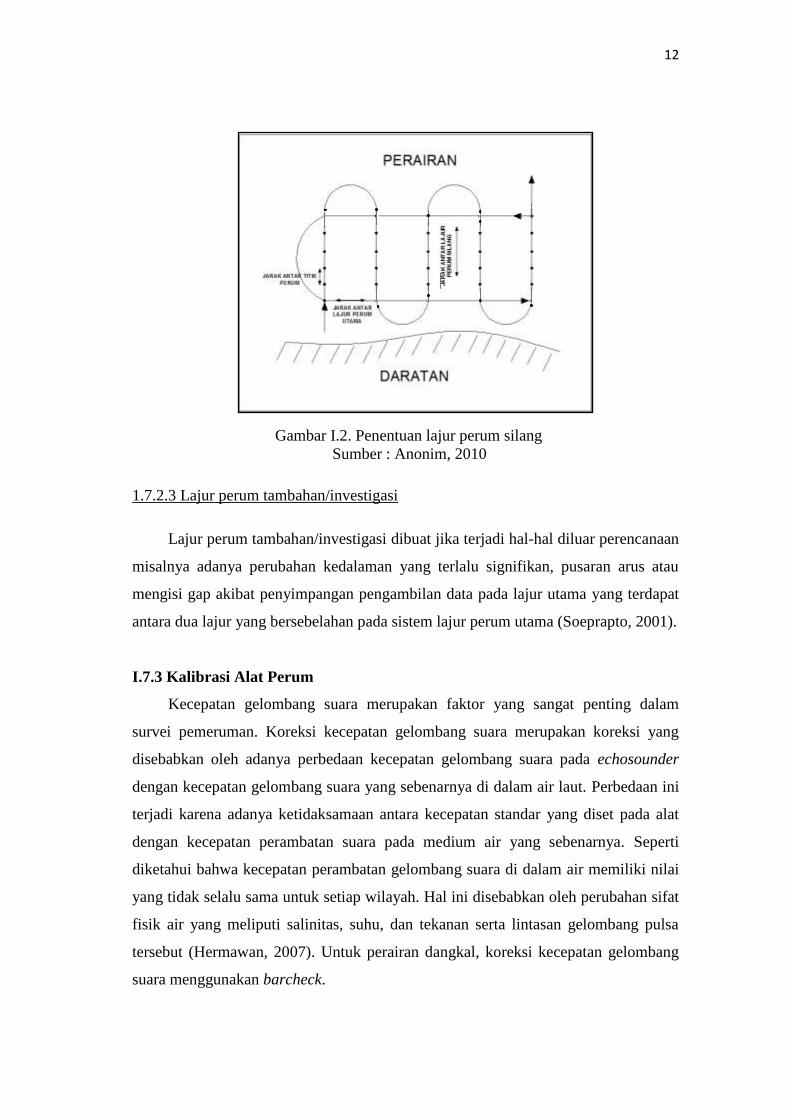
Cara penentuan lajur utama menurut IHO SP-44 tahun 2008 dapat dilihat pada
Gambar 1.1.
1.7.2.2 Lajur perum silang
Lajur perum silang adalah lajur perum yang dibuat memotong lajur perum
utama. Tujuan pembuatan lajur perum silang adalah mendeteksi ada tidaknya
kesalahan hasil pengukuran baik posisi horizontal maupun kedalaman pada sistem
lajur utama. Cara penentuan lajur perum silang yaitu lajur perum silang harus
memotong lajur perum utama dengan sudut lebih besar dari 45o
diusahan mendekati
tegak lurus. Pada umumnya jarak antara lajur perum silang tidak lebih dari 10 kali
jarak antara lajur perum utama (Anonim, 2010).
Cara penentuan lajur perum silang menurut IHO SP-44 tahun 2008 dapat dilihat pada
Gambar 1.2.
Gambar I.1. Penentuan lajur perum utama
Sumber : Anonim, 2010
12
1.7.2.3 Lajur perum tambahan/investigasi
Lajur perum tambahan/investigasi dibuat jika terjadi hal-hal diluar perencanaan
misalnya adanya perubahan kedalaman yang terlalu signifikan, pusaran arus atau
mengisi gap akibat penyimpangan pengambilan data pada lajur utama yang terdapat
antara dua lajur yang bersebelahan pada sistem lajur perum utama (Soeprapto, 2001).
I.7.3 Kalibrasi Alat Perum
Kecepatan gelombang suara merupakan faktor yang sangat penting dalam
survei pemeruman. Koreksi kecepatan gelombang suara merupakan koreksi yang
disebabkan oleh adanya perbedaan kecepatan gelombang suara pada echosounder
dengan kecepatan gelombang suara yang sebenarnya di dalam air laut. Perbedaan ini
terjadi karena adanya ketidaksamaan antara kecepatan standar yang diset pada alat
dengan kecepatan perambatan suara pada medium air yang sebenarnya. Seperti
diketahui bahwa kecepatan perambatan gelombang suara di dalam air memiliki nilai
yang tidak selalu sama untuk setiap wilayah. Hal ini disebabkan oleh perubahan sifat
fisik air yang meliputi salinitas, suhu, dan tekanan serta lintasan gelombang pulsa
tersebut (Hermawan, 2007). Untuk perairan dangkal, koreksi kecepatan gelombang
suara menggunakan barcheck.
Gambar I.2. Penentuan lajur perum silang
Sumber : Anonim, 2010
13
Barcheck terbuat dari lempeng logam berbentuk lingkaran atau segi empat yang
digantungkan pada tali atau rantai berskala dan diletakkan dibawah transducer. Tali
atau rantai berskala digunakan sebagai pembanding hasil ukuran dengan hasil yang
terbaca oleh alat perum gema. Pembandingan pengukuran kedalaman dilakukan
untuk setiap perubahan kedalaman, mulai dari 0 meter hingga kedalaman maksimum
yang akan diperum dengan interval 1 meter (Poerbandono, dkk., 2005). Agar mudah
dinaik-turunkan dalam air, maka dibuatkan beberapa lubang pada lempeng logam
tersebut untuk mengurangi tekanan air pada saat dinaikkan/diturunkan. Fungsi
lempeng logam ini adalah sebagai reflektor gelombang yang dipancarkan transducer.
Data pengukuran barcheck yang diperoleh digunakan untuk mencari hubungan
antara kedalaman sebenarnya dengan kedalaman hasil ukuran menggunakan
echosounder dalam bentuk persamaan linear. Persamaan linear yang dibentuk dapat
dilihat pada rumus I.1 (Anonim,2002) :
dc = [[ ( bari – bari+1 ) ÷ ( reci - reci+1) ] . (do – reci ) ] + bari......................( I.1 )
Keterangan:
dc : kedalaman sebenarnya
do : kedalaman hasil observasi
bari : kedalaman barcheck pada check point i
bari+1 : kedalaman barcheck pada check point i+1
reci : kedalaman bacaan alat pada barcheck point i
reci+1 : kedalaman bacaan alat pada barcheck point i+1
i,i+1 : urutan point kalibrasi kedalaman dan reci < do < reci+1
Pada perairan dalam koreksi dengan barcheck tidak dianjurkan karena
pengaruh arus bawah permukaan dan ombak di permukaan mengakibatkan rantai
barcheck melengkung sehingga ukuran data bacheck yang didapat tidak sesuai
dengan yang sebenarnya. Oleh karena itu untuk menganalisis kecepatan gelombang
suara dengan menggunakan sifat fisik air laut dengan rumus (I.2) yang diturunkan
oleh Wood sebagai berikut (Adil dan Windupranata, 1998) :
V = 1410 + 4.21 T – 0.037 D2 + 1.14 S + 0.018……………………......…(I.2)
Keterangan :
V : kecepatan suara pada temeperatur (T), salinitas (S) dan
kedalaman (D)
14
S : salinitas air laut (%)
T : temperature (oC)
D : kedalaman laut (meter)
I.7.4 Penentuan kedalaman titik pemeruman (h)
Penentuan kedalaman titik pemeruman merupakan suatu proses pengukuran
untuk memperoleh nilai suatu kedalaman yang bertujuan untuk menghasilkan
gambaran bentuk topografi dasar perairan (Poerbandono, dkk., 2005). Seiring dengan
kemajuan teknologi, penerapan teknologi akustik dasar laut terus berkembang untuk
tujuan ilimiah antara lain digunakan untuk mempelajari proses perambatan suara
pada medium air yang mampu memberikan informasi karakteristik dasar perairan,
komunikasi dan penentuan posisi di kolom perairan. Hydro-acoustic merupakan
suatu teknologi pendeteksian bawah air dengan menggunakan gelombang akustik.
Alat survei batimetri yang menggunakan metode gelombang akustik ini adalah
echosounder (alat perum gema).
Sistem echosounder biasanya terdiri dari atas catu daya, seperangkat perekam
data, transducer (pemancar) dan hidrofon (penerima). Prinsip kerja dari sistem ini
adalah transducer memancarkan gelombang akustik dengan frekuensi tertentu
menuju ke dasar perairan secara tegak lurus, kemudian gelombang tersebut
dipantulkan kembali dan diterima oleh hidrofon. Umumnya semakin rendah
frekuensinya, kedalaman perairan yang dicapai juga semakin tinggi. Data yang
diperoleh dari proses itu adalah selang waktu gelombang mulai dipancarkan dan
gelombang kembali diterima, sehingga diperoleh data kedalaman yang dicatat alat
perekam yang merupakan fungsi dari selang waktu. Sebagaimana yang diuraikan
pada rumus (I.3) (Poerbandono, dkk., 2005) :
Dasar hitungan yang digunakan untuk menentukan kedalaman laut ialah
sebagai berikut (Poerbandono, dkk., 2005) :
d= 1
2 𝑣
𝑡1
𝑡2 𝑡 . 𝑑𝑡…………...................................................................( I.3 )
Keterangan :
d : kedalaman laut yang terukur pada saat pengukuran,
15
v(t) : cepat rambat gelombang suara di air,
t1 & t2 : waktu pada saat gelombang suara dipancarkan dan saat
penerimaan gelombang pantulnya.
Nilai kecepatan rambat gelombang di air adalah 1500 m/detik, maka nilai
kedalaman perairan dapat di tentukan berdasarkan persamaan (I.4) berikut ini
(Poerbandono, dkk., 2005):
d= 1
2 (𝑣. 𝛥𝑡) ...........................................................................................( I.4 )
Keterangan :
d : kedalaman laut yang terukur pada saat pengukuran
v : cepat rambat gelombang akustik di medium air (meter/detik)
Δt : selang waktu antara saat gelombang akustik dipancarkan dan saat
gelombang kembali diterima (detik)
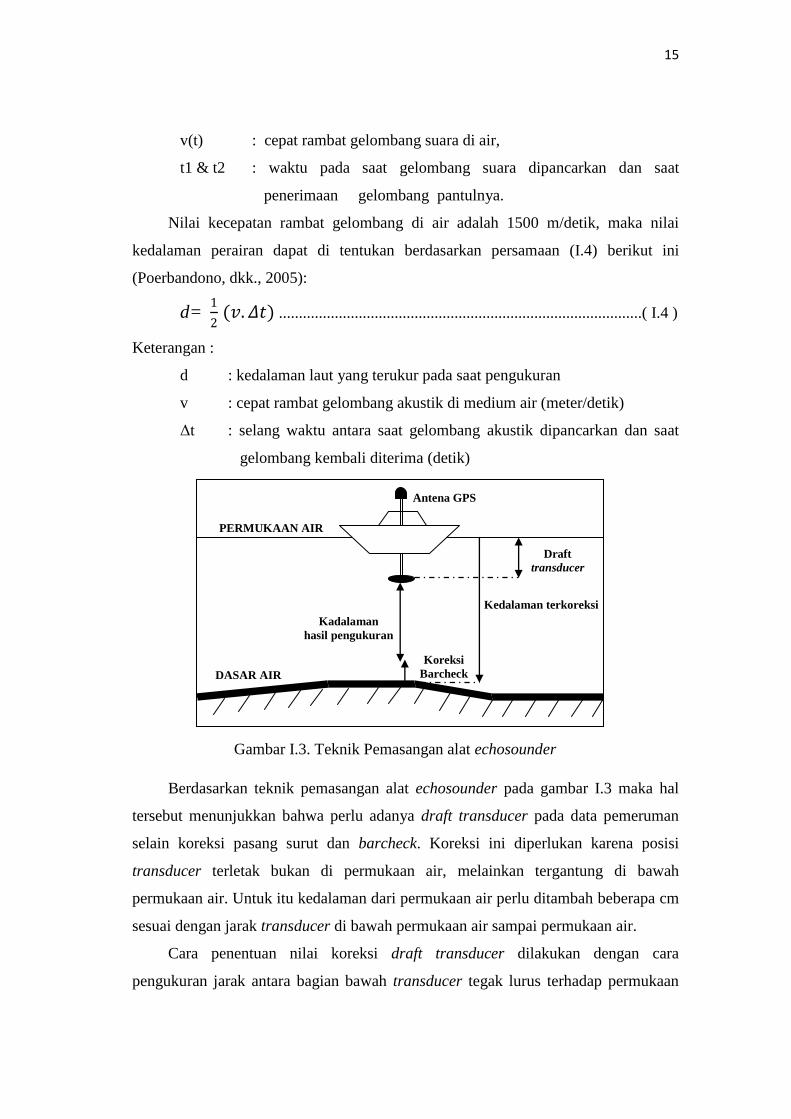
Berdasarkan teknik pemasangan alat echosounder pada gambar I.3 maka hal
tersebut menunjukkan bahwa perlu adanya draft transducer pada data pemeruman
selain koreksi pasang surut dan barcheck. Koreksi ini diperlukan karena posisi
transducer terletak bukan di permukaan air, melainkan tergantung di bawah
permukaan air. Untuk itu kedalaman dari permukaan air perlu ditambah beberapa cm
sesuai dengan jarak transducer di bawah permukaan air sampai permukaan air.
Cara penentuan nilai koreksi draft transducer dilakukan dengan cara
pengukuran jarak antara bagian bawah transducer tegak lurus terhadap permukaan
Gambar I.3. Teknik Pemasangan alat echosounder
DASAR AIR
Draft
transducer
Kedalaman terkoreksi
Koreksi
Barcheck
Antena GPS
PERMUKAAN AIR
Kadalaman
hasil pengukuran
16
air di atasnya pada saat kapal dalam keadaan berhenti terapung. Pengukuran koreksi
draft transducer sebaiknya dilakukan di daerah perairan yang tenang serta diukur
beberapa kali untuk mendapatkan harga rata-ratanya.
I.7.5 Penentuan Posisi Horizontal Titik-Titik Pemeruman (X,Y)
Penentuan posisi titik pemeruman dalam survei hidrografi khususnya untuk
pekerjaan pemetaan laut merupakan peran yang sangat penting. Penentuan koordinat
horizontal titik di laut untuk keperluan survei hidrografi pada dasarnya sama saja
dengan survei topografi di darat. Perbedaan yang nyata adalah titik yang diamat di
laut tidak dapat diam, tetapi target selalu dalam keadaan bergerak.
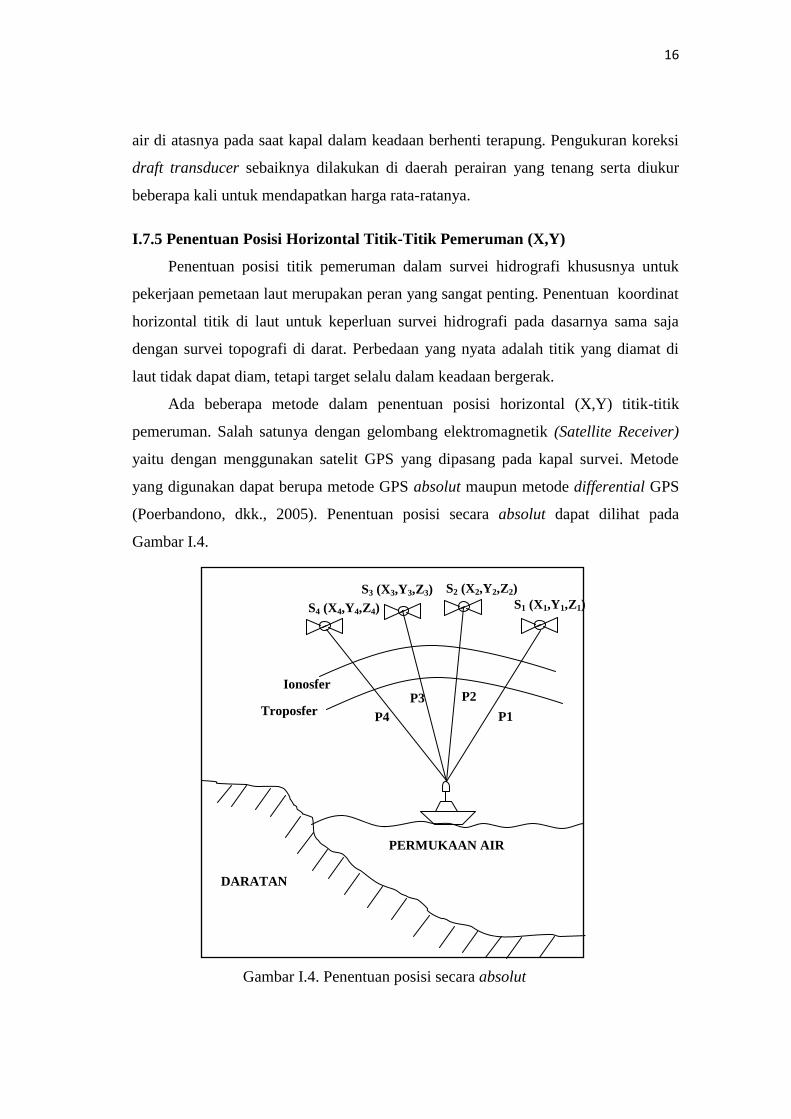
Ada beberapa metode dalam penentuan posisi horizontal (X,Y) titik-titik
pemeruman. Salah satunya dengan gelombang elektromagnetik (Satellite Receiver)
yaitu dengan menggunakan satelit GPS yang dipasang pada kapal survei. Metode
yang digunakan dapat berupa metode GPS absolut maupun metode differential GPS
(Poerbandono, dkk., 2005). Penentuan posisi secara absolut dapat dilihat pada
Gambar I.4.
Gambar I.4. Penentuan posisi secara absolut
P2
P3
P4
Ionosfer
S4 (X4,Y4,Z4)
S2 (X2,Y2,Z2)
S1 (X1,Y1,Z1)
S3 (X3,Y3,Z3)
Troposfer
DARATAN
PERMUKAAN AIR
P1
17
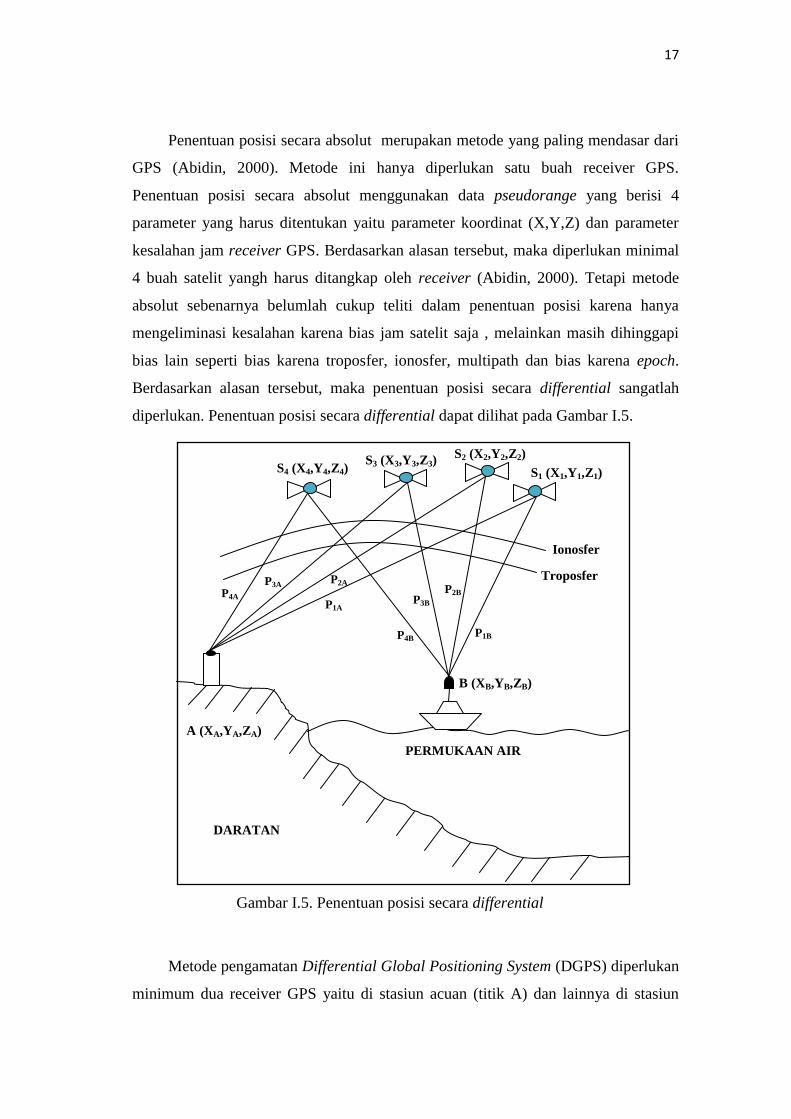
Penentuan posisi secara absolut merupakan metode yang paling mendasar dari
GPS (Abidin, 2000). Metode ini hanya diperlukan satu buah receiver GPS.
Penentuan posisi secara absolut menggunakan data pseudorange yang berisi 4
parameter yang harus ditentukan yaitu parameter koordinat (X,Y,Z) dan parameter
kesalahan jam receiver GPS. Berdasarkan alasan tersebut, maka diperlukan minimal
4 buah satelit yangh harus ditangkap oleh receiver (Abidin, 2000). Tetapi metode
absolut sebenarnya belumlah cukup teliti dalam penentuan posisi karena hanya
mengeliminasi kesalahan karena bias jam satelit saja , melainkan masih dihinggapi
bias lain seperti bias karena troposfer, ionosfer, multipath dan bias karena epoch.
Berdasarkan alasan tersebut, maka penentuan posisi secara differential sangatlah
diperlukan. Penentuan posisi secara differential dapat dilihat pada Gambar I.5.
Metode pengamatan Differential Global Positioning System (DGPS) diperlukan
minimum dua receiver GPS yaitu di stasiun acuan (titik A) dan lainnya di stasiun
Gambar I.5. Penentuan posisi secara differential
S2 (X2,Y2,Z2)
S1 (X1,Y1,Z1)
PERMUKAAN AIR
DARATAN
B (XB,YB,ZB)
A (XA,YA,ZA)
P2A
P1A
Ionosfer
S4 (X4,Y4,Z4)
Troposfer
S3 (X3,Y3,Z3)
P3A
P4A
P1B
P2B P3B
P4B

18
pengamat (titik B). Stasiun acuan adalah yang telah diketahui koordinatnya
sedangkan stasiun pengamat adalah stasiun yang akan ditentukan posisinya dengan
DGPS. Standardisasi yang dijadikan acuan terbaru dalam penentuan posisi telah
diterbitkan oleh IHO yaitu IHO SP-44 tahun 2008, seperti yang terlampir pada tabel
I.2.
Tabel I.2 Standard ketelitian posisi
Orde
Spesial
1a
1b
2
Posisi titik kedalaman
2 m
5 m + 5%
kedalaman
5 m + 5%
kedalaman
20 m + 10%
kedalaman
Orde
Spesial
1a
1b
2
Posisi alat bantu
navigasi tetap dan
fitur penting bagi
navigasi
2 m
2 m
2 m
2 m
Posisi garis pantai
dan fitur yang kurang
penting bagi navigasi
10 m
20 m
20 m
20 m
Posisi alat bantu
navigasi apung
10 m
10 m
10 m
20
1.7.6 Pengolahan Data Batimetri
Hasil dari pengukuran batimetri adalah data kedalaman (h) dan data posisi
(x,y). Untuk mendapatkan data kedalaman yang terkoreksi maka perlu
mempertimbangkan koreksi tinggi muka air saat dilakukan pemeruman, koreksi draft
transducer dan koreksi barcheck. (Septiyadi, 2013). Seperti dijelaskan pada rumus
(I.5) dan seperti yang terlihat pada gambar I.8 :
Hterkoreksi = Hechosounder + draft transducer + koreksi barcheck……...……..…...….(I.5)
(Sumber: IHO SP-44 Tahun 2008)

19
Pada gambar I.6 dapat terlihat bahwa untuk memperoleh angka kedalaman
yang terkoreksi ke bidang acuan (Chart Datum). Untuk membedakan dengan angka
ketinggian maka angka kedalaman harus bernilai negatif. Hal ini dikarenakan bahwa
angka ketinggian yang ada pada palem pasut merupakan angka ketinggian di atas
muka air laut, maka nilai ketinggian titik-titik pemeruman dapat diketahui dengan
mengacu pada rumus (I.6) dan (I.7) :
Hreduksi = (hmuka air – hchart datum) - Hterkoreksi……...………………………..…..…….(I.6)
Untuk menunjukkan nilai kedalaman maka Hreduksi bernilai negatif. Selanjutnya
Hreduksi digunakan untuk keperluan pembuatan garis kontur kedalaman, sedangkan
untuk pembuatan DTM (Digital Terrain Model) digunakan nilai Z (angka
ketinggian). Nilai Z ini diperoleh dengan rumus :
Z = hchart datum + Hreduksi……...………………………….………………………….(I.7)
Pengolahan data posisi titik pemeruman diperlukan untuk memperoleh angka
posisi horizontal yang sesuai dengan bidang datum dan sistem proyeksi yang
digunakan.
DASAR AIR
Draft
transducer
Kedalaman
terkoreksi
Koreksi
Barcheck
Antena GPS
Kadalaman
hasil pengukuran Kedalaman
pada bidang
acuan
PERMUKAAN AIR
PALEM PASUT
Chart datum
Gambar I.6. Penentuan kedalaman yang tereduksi terhadap bidang acuan
20
1.7.7 Standardisasi Survei Hidrografi
Perkembangan teknologi pengukuran batimetri diikuti pula dengan
perkembangan standardisasi atau acuan teknis yang digunakan. Standardisasi ini
menjadi acuan agar data yang didapatkan terjamin kualitasnya. Dalam pelaksanaan
survei hidrografi untuk keperluan pemetaan di Indonesia, pedoman yang digunakan
sebagai standardisasi adalah IHO Standards Of Hydrographic Surveys dan SNI
(Standar Nasional Indonesia).
1.7.7.1 IHO Standards Of Hydrographic Surveys
IHO Standards Of Hydrographic Surveys merupakan standardisasi yang
dikeluarkan oleh IHO (International Hydrography Organization). IHO adalah
organisasi teknis internasional yang bertugas untuk mengkoordinir aktifitas-aktifitas
Dinas Hidrografi Nasional negara-negara anggotanya. IHO pada awalnya didirikan
pada 1921 sebagai Biro Hidrografi Internasional (IHB). IHO telah menerbitkan
serangkaian standardisasi yang telah dikembangkan, salah satunya IHO Standards Of
Hidrographic Surveys SP-44. Standardisasi ini digunakan membantu meningkatkan
keselamatan navigasi.
Dengan perkembangan teknologi yang semakin maju, maka dilakukan
beberapa revisi terhadap IHO SP-44 sehingga IHO sendiri telah menerbitkan 5 edisi
yaitu pada tahun 1968, 1982, 1987, 1998, daan 2008. IHO Standards Of
Hydrographic Surveys SP-44 tahun 2008 adalah standardisasi terbaru yang telah
diperbaharui terkait dengan membuat panduan yang lebih jelas mengenai fitur dasar
laut yang cukup mengkahawatirkan, termasuk kemampuan sistem untuk mendeteksi
fitur dan karakteristik fitur untuk dideteksi seperti teknologi multibeam dan LIDAR
(Anonim, 2008).
1.7.7.2 SNI (Standar Nasional Indonesia)
Indonesia sebagai negara kepulauan yang mayoritas wilayahnya terdiri dari
perairan memiliki suatu acuan atau pedoman bagi seluruh pelaksana survei hidrografi
untuk pemetaan dasar laut. Acuan tersebut adalah SNI 7646-2010 untuk bidang
survei hidrografi. SNI 7646-2010 dikeluarkan oleh BSNI (Badan Standardisasi
21
Nasional Indonesia) yaitu lembaga yang bertugas membuat standardisasi nasional di
Indonesia.
SNI 7646-2010 merujuk pada IHO Standards Of Hydrographic Surveys karena
Indonesia merupakan salah satu negara yang menjadi anggota dari IHO. Dalam SNI
ini hanya dibahas mengenai SNI survei hidrografi dengan menggunakan peralatan
singlebeam echosounder. Pemilihan metode singlebeam echosounder karena metode
ini paling banyak digunakan di Indonesia pada saat ini. SNI 7646-2010 menetapkan
ketentuan dan prosedur survei hidrografi menggunakan singlebeam echosounder
yang meliputi ketentuan-ketentuan, prosedur pelaksanaan survei hidrografi,
pengolahan data, penyimpanan dan penyajian data, dan pelaporan hasil survei
hidrografi.
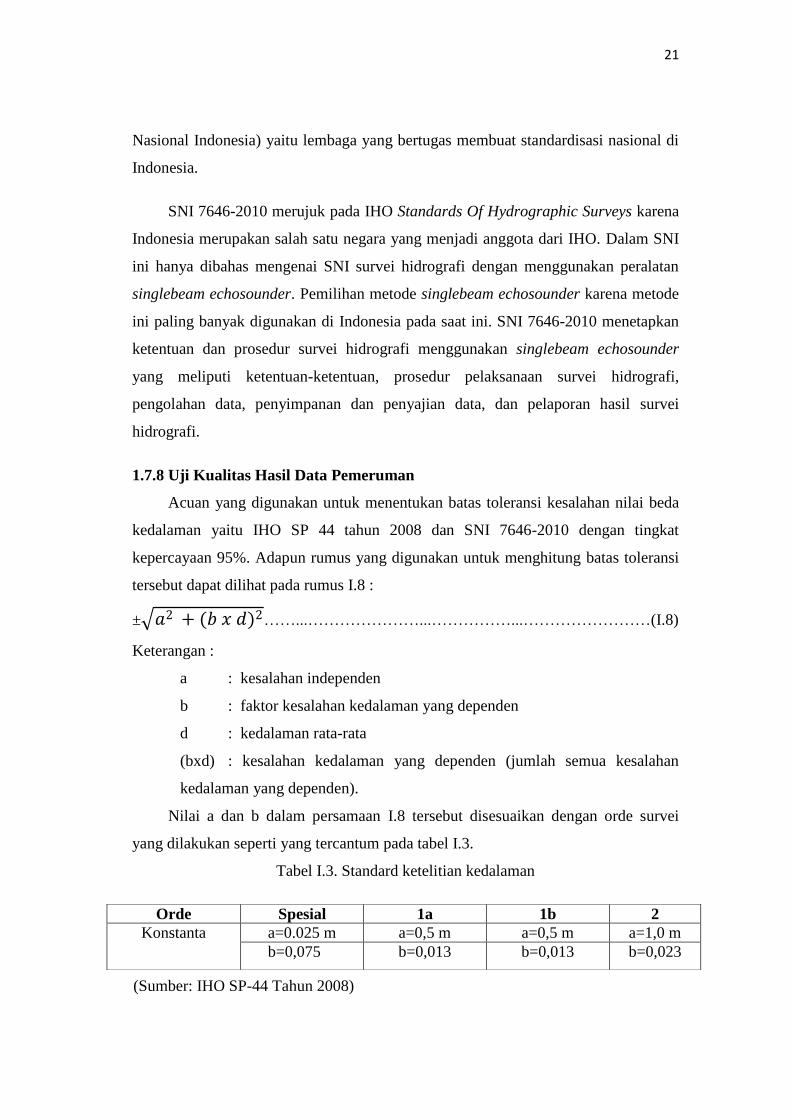
1.7.8 Uji Kualitas Hasil Data Pemeruman
Acuan yang digunakan untuk menentukan batas toleransi kesalahan nilai beda
kedalaman yaitu IHO SP 44 tahun 2008 dan SNI 7646-2010 dengan tingkat
kepercayaan 95%. Adapun rumus yang digunakan untuk menghitung batas toleransi
tersebut dapat dilihat pada rumus I.8 :
± 𝑎2 + (𝑏 𝑥 𝑑)2……...…………………...……………...……………………(I.8)
Keterangan :
a : kesalahan independen
b : faktor kesalahan kedalaman yang dependen
d : kedalaman rata-rata
(bxd) : kesalahan kedalaman yang dependen (jumlah semua kesalahan
kedalaman yang dependen).
Nilai a dan b dalam persamaan I.8 tersebut disesuaikan dengan orde survei
yang dilakukan seperti yang tercantum pada tabel I.3.
Tabel I.3. Standard ketelitian kedalaman
Orde Spesial 1a 1b 2
Konstanta a=0.025 m a=0,5 m a=0,5 m a=1,0 m
b=0,075 b=0,013 b=0,013 b=0,023
(Sumber: IHO SP-44 Tahun 2008)
22
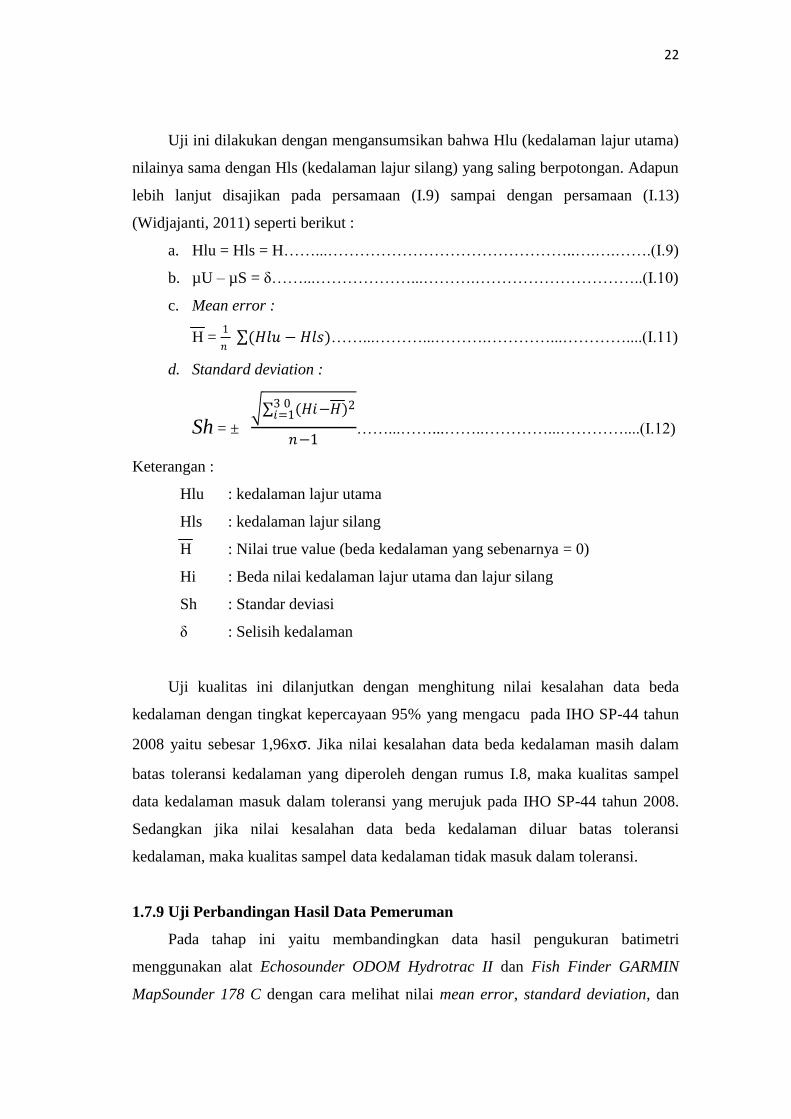
Uji ini dilakukan dengan mengansumsikan bahwa Hlu (kedalaman lajur utama)
nilainya sama dengan Hls (kedalaman lajur silang) yang saling berpotongan. Adapun
lebih lanjut disajikan pada persamaan (I.9) sampai dengan persamaan (I.13)
(Widjajanti, 2011) seperti berikut :
a. Hlu = Hls = H……...………………………………………..….….…….(I.9)
b. µU – µS = δ……...………………...……….…………………………..(I.10)
c. Mean error :
H = 1
𝑛 (𝐻𝑙𝑢 − 𝐻𝑙𝑠)……...………...……….…………...…………....(I.11)
d. Standard deviation :
Sh = ±
(𝐻𝑖−𝐻)23 0𝑖=1
𝑛−1……...……...……..…………...…………....(I.12)
Keterangan :
Hlu : kedalaman lajur utama
Hls : kedalaman lajur silang
H : Nilai true value (beda kedalaman yang sebenarnya = 0)
Hi : Beda nilai kedalaman lajur utama dan lajur silang
Sh : Standar deviasi
δ : Selisih kedalaman
Uji kualitas ini dilanjutkan dengan menghitung nilai kesalahan data beda
kedalaman dengan tingkat kepercayaan 95% yang mengacu pada IHO SP-44 tahun
2008 yaitu sebesar 1,96xσ. Jika nilai kesalahan data beda kedalaman masih dalam
batas toleransi kedalaman yang diperoleh dengan rumus I.8, maka kualitas sampel
data kedalaman masuk dalam toleransi yang merujuk pada IHO SP-44 tahun 2008.
Sedangkan jika nilai kesalahan data beda kedalaman diluar batas toleransi
kedalaman, maka kualitas sampel data kedalaman tidak masuk dalam toleransi.
1.7.9 Uji Perbandingan Hasil Data Pemeruman
Pada tahap ini yaitu membandingkan data hasil pengukuran batimetri
menggunakan alat Echosounder ODOM Hydrotrac II dan Fish Finder GARMIN
MapSounder 178 C dengan cara melihat nilai mean error, standard deviation, dan
23
nilai to dari keseluruhan sampel data kedalaman. Adapun rumus untuk menghitung
nilai mean error, standard deviation, dan nilai to terdapat pada persamaan (I.11),
(I.12), dan (I.13) (Widjajanti, 2011).
Uji perbandingan data kedalaman ini menggunakan uji statisitik sampling kecil
dengan sampel berpasangan dengan menggunakan tabel T-student test. Berdasarkan
hasil to dapat diketahui apakah data kedalaman hasil pengukuran masuk dalam
toleransi atau tidak dengan tingkat kepercayaan 95% (±1,96).
to = (𝐻𝑖−𝐻)
𝑆ℎ/√𝑛……...………………….………………...…………....(I.13)
Hipotesis :
a. Ho ; µ1 = µ2 atau µ1 - µ2 = δ
b. HI ; µ1 ≠ µ2 atau µ1 - µ2 ≠ δ
Sehingga :
a. Ho ditolak, jika to > +1,96 atau to < -1,96
b. Ho diterima, jika to -1,96 < to < +1,96
Keterangan :
H : Nilai true value (beda kedalaman = 0)
Hi : Beda nilai kedalaman hasil pengukuran ODOM dan Fish Finder
δ : Selisih kedalaman
1.7.10 Fish Finder GARMIN MAP Sounder 178C
Fish Finder Garmin MAP Sounder 178 C adalah alat jenis fish finder yang
dipadukan dengan teknologi GPS sehingga posisi suatu objek yang direkam dapat
diketahui. Biasanya Fish Finder Garmin MAP Sounder 178 C digunakan untuk
mencari posisi ikan dan mengukur kedalaman dalam rangka mengetahui kondisi
topografi dasar laut dengan menampilkan kontur kedalaman secara rinci. Alat ini
dirancang khususnya untuk perairan dangkal dan tidak terlalu luas seperti waduk,
danau, dan sungai. Biaya yang dikeluarkan untuk alat ini pun cenderung lebih murah.
Fish Finder Garmin MAP Sounder 178 C sendiri mengkombinasikan antara sistem
echosounder dan sistem sonar aktif sehingga posisi ikan dapat ditampilkan pada
media layar berupa Liquid Crystal Display maupun layar Cathode Ray Tube
(Mahbub, 2011).

24
Dalam pendeteksian ikan digunakan sistem hidroakustik yang memancarkan
sinyal akustik secara vertikal yang disebut Fish Finder (Burczynski, 1986). Pulsa
gelombang yang dipancarkan dari transmitter diubah menjadi gelombang suara oleh
transducer dan kemudian dipancarkan ke dalam air. Ketika gelombang suara
mengenai obyek di dalam air seperti ikan, maka gelombang tersebut dipantulkan
kembali menurut komposisi, ukuran, dan bentuk obyek tersebut. Obyek yang terkena
gelombang suara tersebut dapat terlihat di layar karena gelombang suara yang
dipantulkan ditangkap kembali oleh transducer yang diubah menjadi sinyal elektrik
dan diperjelas pada receiver, diolah dan ditampilkan ke dalam layar. Kedalaman
obyek yang dikenai gelombang suara dapat ditentukan dengan adanya nilai
kecepatan gelombang suara pada medium air yang berkisar 1500 m/dt dan waktu
tempuh antara gelombang dipancarkan dan diterima kembali oleh receiver.
Keakuratan hasil yang muncul pada layar tampilan tergantung kepada frekuensi dan
kekuatan transmisi (Poerbandono, dkk., 2005).
Teknologi GPS yang terdapat pada alat ini merupakan receiver tipe navigasi
dengan penentuan posisi secara absolut, tetapi alat ini dilengkapi dengan fasilitas
RTCM 104 DGPS sebagai koreksi dan output. Fasilitas ini berguna untuk melakukan
koneksi terhadap stasiun atau satelit yang dapat mengirimkan koreksi, misalnya
CORS dan OMNISTAR sehingga proses penentuan posisi selanjutnya tidak lagi
secara absolut melainkan secara differential. Gambar Fish Finder GARMIN
MapSounder 178 C dapat dilihat pada Gambar I.7.
Gambar I.7. Fish Finder GARMIN MapSounder 178 C
Sumber : http://www.indonetwork.co.id
25
Manfaat dari alat Fish Finder adalah (Anonim, 2013) :
a. Dapat mengetahui daerah diduga mempunyai kelimpahan/kepadatan ikan
yang tinggi.
b. Memberikan informasi kepada nelayan setempat sekaligus mengevaluasi
kinerja unit penangkapan yang digunakan sehingga dapat dihasilkan hasil
tangkapan yang optimum.
c. Memberikan informasi kepada pelayaran agar terhindar dari bahaya-bahaya
kapal kandas dikarenakan dangkalnya suatu perairan.
d. Dapat mempermudah unit penelitian laut beserta sumberdaya laut tersebut.
1.7.11 Echosounder ODOM Hydrotrac II
Echosounder Odom Hydrotrac II khusus dirancang untuk wahana kapal yang
berukuran kecil dan kondisi kapal yang keras. Alat ini digunakan untuk mendapatkan
profil kedalaman yang kontinyu sepanjang lajur perum dengan ketelitian yang cukup
baik. Sistem Echosounder ODOM Hydrotrac II biasanya terdiri dari catu daya,
seperangkat perekam data, transducer (pemancar) dan hidrofon (penerima).
Transducer memancarkan pulsa akustik dengan frekuensi tertentu menuju ke dasar
perairan secara tegak lurus, kemudian pulsa tersebut dipantulkan kembali dan
diterima oleh hidrofon. Alat ini khusus dirancang untuk wahana kapal yang
berukuran kecil dan kondisi kapal yang keras. Echosounder ODOM Hydrotrac II
juga dilengkapi dengan GPS internal yang digunakan untuk penentuan posisi dan
display yang menampilkan printer chart paper. Paper yang digunakan adalah thermal
paper, dimana display chart paper ini menampilkan gambaran profil dasar perairan
yang dikonversi dari data kedalaman (Septiyadi, 2013).
Echosounder ODOM Hydrotrack II dilengkapi dengan GPS (Global
Positioning System), sehingga posisi titik fix perum dapat diketahui. Odom
Hydrotrack II menggunakan metode gelombang akustik dalam melakukan akuisisi
data. (Septiyadi, 2013). Untuk prinsip kerja alat ini sama dengan Fish Finder
GARMIN MAP Sounder 178 C. Gambar Echosounder ODOM Hydrotrack II dapat
dilihat pada Gambar I.8.

26
I.8 Hipotesis
Hipotesis berdasarkan penelitian yang akan dilakukan adalah secara statistik
alat Fish Finder GARMIN MAP Sounder 178C dan Echosounder ODOM Hydrotrac
II akan memberikan ketelitian (presisi) yang berbeda.
Gambar I.8. Echosounder Odom Hydrotrack II
Sumber : http://www.hydro-international.com