makalah - smart parking final
TRANSCRIPT

SMART PARKING : Sistem Informasi dan Layanan Parkir di Pusat Pertokoan dan Perkantoran
Agus Urip Ari Wibowo (23208007), Ari Rinaldi Sumarmo (23208043)Didin Saefudin (23208015)
Sekolah Teknik Elektro & Informatika, Institut Teknologi BandungSTEI-ITB, Jl. Ganesha 10, Bandung 40132, Indonesia
AbstrakKomputasi pervasive merupakan suatu konsep mengintegrasikan komputer ke dalam
kehidupan sehari-hari dengan keberadaan komputer yang tidak lagi dirasakan secara langsung oleh para penggunanya. Dengan penggunaan komputer yang terintegrasi dapat memudahkan para pengguna dalam melakukan kegiatan sehari-hari dan mempersingkat
waktu yang dibutuhkan untuk melakukan suatu kegiatan. Dengan perkembangan teknologi saat ini, komponen pendukung komputasi pervasive telah tersedia dan mulai dapat diimplementasikan. Salah satu aplikasi komputasi pervasive yang dapat mulai diterapkan adalah dalam hal sistem parkir kendaraan roda empat yaitu sistem informasi dan layanan parkir di pusat pertokoan dan perkantoran yang dinamakan dengan Smart Parking. Smart Parking merupakan suatu sistem layanan yang menyajikan informasi bagi para pengguna kendaraan mengenai lokasi parkir yang tersedia di suatu area gedung
parkir di pusat pertokoan atau perkantoran.Dalam makalah ini akan dibahas mengenai konsep dasar dan arsitektur sistem Smart Parking serta simulasi sistem Smart Parking menggunakan perangkat lunak Network Simulator NS2.
Kata kunci : Smart Parking, Komputasi Pervasive, Simulasi NS2
1. Pendahuluan
Saat ini komputer telah semakin banyak digunakan oleh manusia dalam kehidupan sehari-hari. Penggunaan komputer dapat memudahkan serta mempersingkat waktu yang dibutuhkan manusia untuk melakukan suatu kegiatan. Seiring dengan perkembangan teknologi, ukuran komputer pun kini semakin kecil sehingga penggunaan perangkat komputer dapat lebih mudah diintegrasikan ke dalam kehidupan sehari-hari dengan keberadan perangkat komputer yang tidak lagi dirasakan secara langsung oleh para penggunanya. Konsep ini dikenal dengan istilah komputasi pervasive. Dengan penggunaan komputer yang terintegrasi dapat membantu manusia dalam menghadapi dan menyelesaikan beberapa permasalahan dalam kehidupan sehari-hari dalam waktu yang lebih singkat.
Salah satu permasalahan yang sering dihadapi saat ini adalah kesulitan yang dialami pengguna kendaraan khususnya mobil dalam mencari lokasi parkir yang kosong di suatu area parkir. Dalam sistem parkir konvesional, pengguna kendaraan hanya diberikan tanda masuk ke lokasi parkir namun tidak diberikan informasi mengenai lokasi kavling parkir yang tersedia sehingga terkadang pengguna kendaraan membutuhkan waktu yang cukup lama untuk mendapatkan lokasi parkir. Hal ini dapat diatasi dengan suatu sistem parkir yang disebut dengan Smart Parking.
Hal. 1 dari 33
Smart Parking merupakan suatu layanan yang dapat menyajikan informasi kepada para pengguna kendaraan mengenai lokasi kavling parkir yang tersedia di suatu area parkir. Dengan menggunakan konsep komputasi pervasive, perangkat pendukung sistem yang dibutuhkan dalam Smart Parking dapat diintegrasikan ke dalam perangkat yang telah dimiliki dan digunakan dalam keseharian oleh pengguna kendaraan sehingga pengguna kendaraan dapat menikmati layanan yang disajikan tanpa merasakan adanya perangkat tambahan.
2. Latar Belakang Permasalahan
Latar belakang permasalahan dalam makalah ini adalah menemukan solusi untuk mengatasi permasalahan dalam sistem parkir konvensional yaitu kesulitan dan lama waktu yang dibutuhkan untuk mencari dan memperoleh lokasi kavling parkir yang kosong di suatu area parkir di suatu pusat pertokoan atau perkantoran, khususnya untuk kendaraan roda empat
3. Batasan Masalah
Dalam penulisan makalah ini, pembahasan dibatasi pada hal-hal sebagai berikut. Area parkir dalam hal ini adalah suatu area di dalam suatu gedung yang disediakan
khusus sebagai lahan parkir. Layanan Smart Parking disajikan hanya bagi para pengguna kendaraan roda empat
atau mobil.
4. Konsep Dasar dan Arsitektur Sistem
Ide dasar dari sistem Smart Parking adalah memberikan layanan kepada pengguna kendaraan berupa penyajian informasi mengenai lokasi kavling parkir yang tersedia di suatu area gedung parkir serta informasi mengenai lama waktu parkir dan biaya yang harus dibayarkan.
Informasi akan diberikan ketika pengguna kendaraan memasuki area parkir melalui gerbang masuk dan ketika pengguna kendaraan akan meninggalkan area parkir melalui gerbang keluar. Ketika berada digerbang masuk, pengguna kendaraan akan mendapatkan informasi melalui perangkat telepon selular dengan isi informasi yang disampaikan adalah keterangan mengenai lokasi kavling parkir yang tersedia yaitu nomor kavling parkir beserta lokasi lantai, dalam bentuk tampilan teks dan gambar peta lokasi. Ketika berada digerbang keluar, pengguna kendaraan akan mendapatkan informasi melalui perangkat telepon selular dengan isi informasi yang disampaikan adalah lama waktu parkir dan biaya yang harus dibayarkan.
Selama kendaraan sedang berada di area parkir, meski pengguna kendaraan sedang berada di luar area parkir atau di dalam area gedung pertokoan atau perkantoran, pengguna kendaraan tetap dapat memperoleh layanan sistem Smart Parking yaitu berupa notifikasi yang menampilkan informasi lama waktu kendaraan telah menempati kavling parkir, yang dikirimkan secara periodik setiap 1 jam. Layanan notifikasi dapat diaktifkan atau dinonaktifkan sesuai dengan keinginan pengguna.
Hal. 2 dari 33
4.1 Arsitektur Sistem
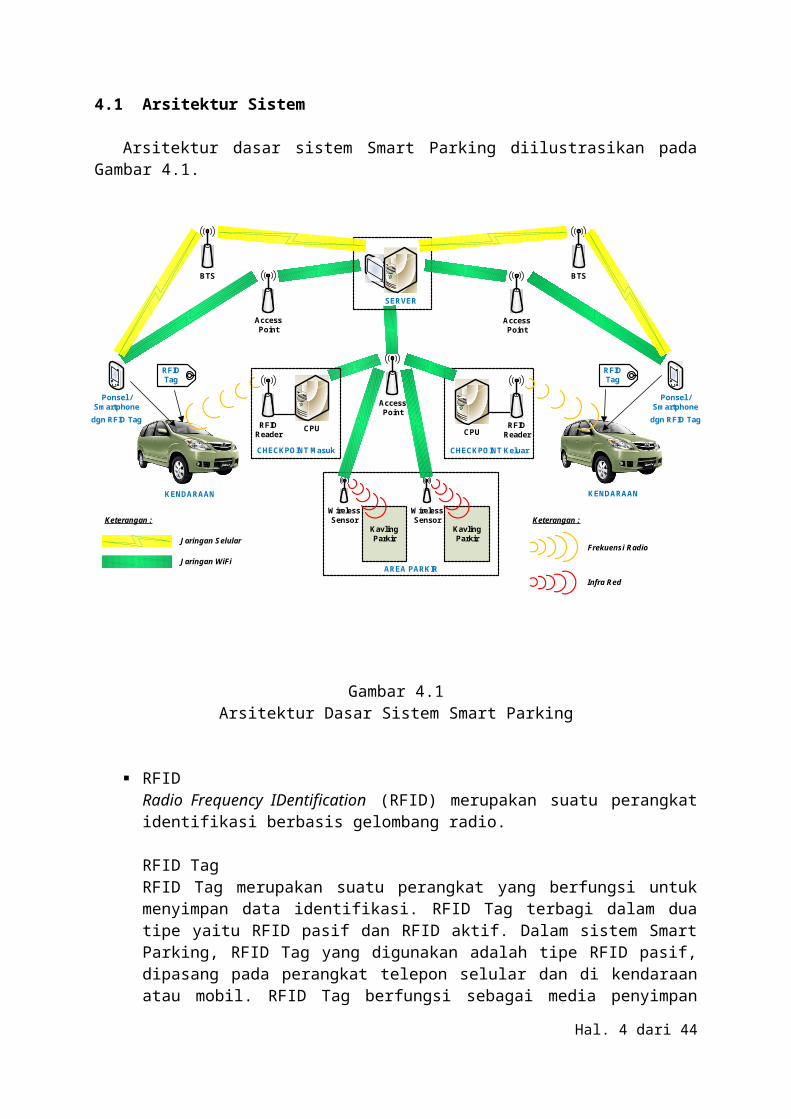
Arsitektur dasar sistem Smart Parking diilustrasikan pada Gambar 4.1.
Gambar 4.1Arsitektur Dasar Sistem Smart Parking
RFID Radio Frequency IDentification (RFID) merupakan suatu perangkat identifikasi berbasis gelombang radio.
RFID TagRFID Tag merupakan suatu perangkat yang berfungsi untuk menyimpan data identifikasi. RFID Tag terbagi dalam dua tipe yaitu RFID pasif dan RFID aktif. Dalam sistem Smart Parking, RFID Tag yang digunakan adalah tipe RFID pasif, dipasang pada perangkat telepon selular dan di kendaraan atau mobil. RFID Tag berfungsi sebagai media penyimpan informasi data dari pengguna dan kendaraan yang digunakan.
RFID Reader RFID Reader merupakan perangkat untuk memindai data yang terdapat pada RFID Tag. Dalam sistem Smart Parking, RFID Reader dipasang di gerbang masuk dan gerbang keluar area parkir. RFID Reader dipasang pada dua posisi yaitu di atas portal gerbang untuk memindai RFID Tag kendaraan dan di samping portal gerbang di bagian sisi pengemudi untuk memindai RFID Tag pengguna kendaraan.
Hal. 3 dari 33
KENDARAANKENDARAAN
RFID Tag
RFIDReader
CPU
SERVER
KavlingParkir
KavlingParkir
AREA PARKIR
WirelessSensor
AccessPoint
WirelessSensor
AccessPoint
CHECKPOINT Masuk
BTS
RFIDReaderCPU
RFID Tag
AccessPoint
BTS
CHECKPOINT Keluar
Keterangan :
Jaringan Selular
Jaringan WiFi
Ponsel / Smartphone
dgn RFID Tag
Ponsel / Smartphone
dgn RFID Tag
Keterangan :
Frekuensi Radio
Infra Red
Komputer personal atau Mini CPUMini CPU berfungsi sebagai pengatur portal pada gerbang masuk dan gerbang keluar serta sebagai penghubung antara RFID Reader dari gerbang masuk dan gerbang keluar dengan Komputer Server melalui perangkat WiFi yang terpasang pada mini CPU.
Komputer Server Komputer Server berfungsi untuk pengolahan dan penyimpanan database pengguna kendaraan yang dikirimkan dari gerbang masuk dan gerbang keluar. Komputer Server diletakkan di ruang pusat kontrol gedung pertokoan/perkantoran.
Telepon Selular Telepon selular berfungsi sebagai penerima layanan informasi Smart Parking. Dalam perencanaan sistem Smart Parking, telepon selular yang digunakan harus memiliki fasilitas SMS, WiFi, serta Internet.
Wireless Sensor Wireless Sensor diletakkan disetiap kavling parkir di area gedung parkir, berfungsi sebagai pendeteksi kebeberadaan kendaraan di kavling parkir. Wireless Sensor akan mengirimkan data ke server secara periodik yang menandakan suatu kavling tidak ditempati atau telah ditempati oleh suatu kendaraan. Dalam perencanaan sistem Smart Parking, tipe wireless sensor yang digunakan adalah Infra Red Wireless Sensor.
Jaringan WiFi/Wireless LANJaringan WiFi berfungsi sebagai penghubung antara seluruh elemen penyusun dalam sistem Smart Parking. Jaringan WiFi dipasang diseluruh area parkir dan di dalam gedung pertokoan atau perkantoran.
Jaringan SelularJaringan Selular berfungsi sebagai jaringan pendukung jika jaringan WiFi atau perangkat WiFi pada telepon selular sedang mengalami gangguan. Jika jaringan atau perangkat WiFi sedang mengalami ganguan, maka layanan informasi akan disampaikan melalui jaringan selular dalam format SMS atau MMS ke telepon selular pengguna
4.2 Prasyarat dan Asumsi
Dalam perencanaan sistem Smart Parking, terdapat beberapa prasyarat yang harus dipenuhi dan asumsi kondisi yang dibutuhkan agar sistem Smart Parking dapat diterapkan.
Prasyarat dan asumsi untuk perencanaan sistem Smart Parking adalah sebagai berikut. Setiap kendaraan telah dilengkapi dengan RFID Tag dengan data yang tercantum pada
RFID Tag adalah data-data kendaraan sesuai dengan yang tertera pada STNK ditambahkan Nomor Ponsel Pemilik yang tertera pada STNK
Ponsel yang dimiliki dan digunakan oleh pemilik/pengguna kendaraan telah dilengkapi dengan RFID Tag dengan data yang tercantum pada RFID Tag adalah Nama Pemilik, Nomor Ponsel dan MAC Address Ponsel
Fasilitas WiFi pada ponsel yang digunakan oleh pemilik/pengguna kendaraan selalu dalam keadaan aktif
Hal. 4 dari 33
Ponsel telah dilengkapi dengan perangkat lunak khusus untuk menerima dan menampilkan informasi dari layanan Smart Parking melalui jaringan WiFi
Area parkir dalam hal ini berupa area di dalam gedung yang dibangun khusus untuk area parkir
4.3 Skenario Sistem dan Diagram Alir
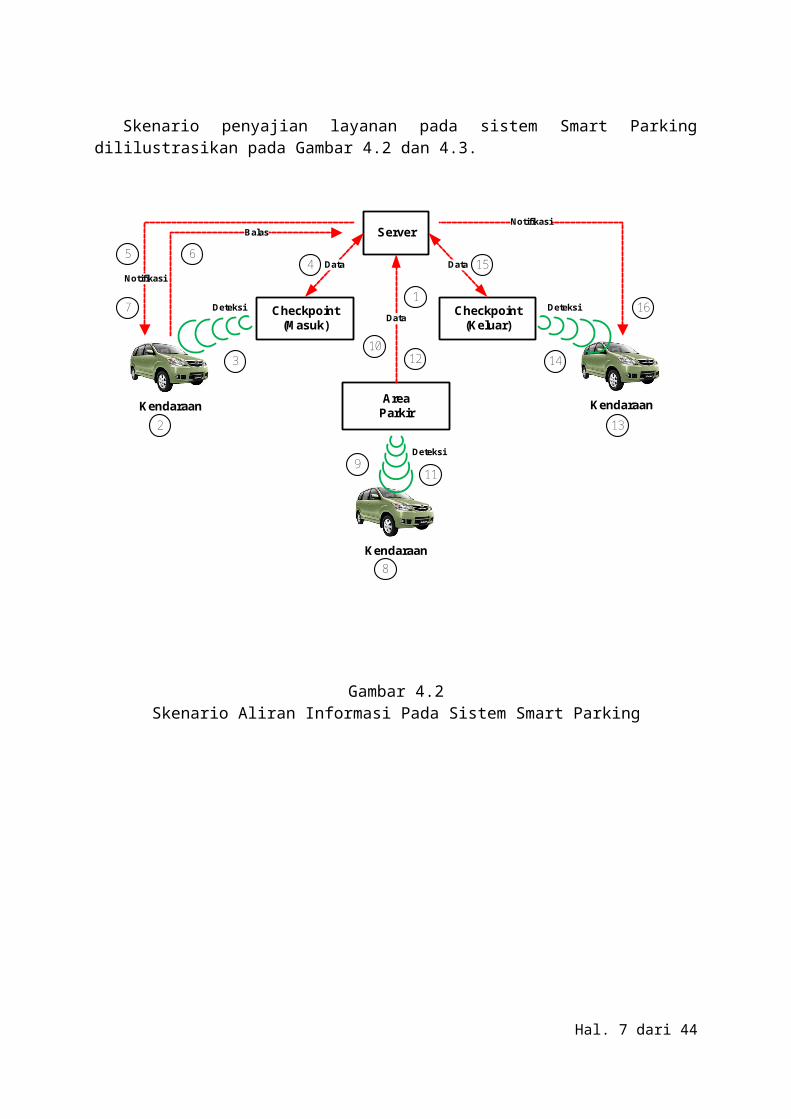
Skenario penyajian layanan pada sistem Smart Parking dililustrasikan pada Gambar 4.2 dan 4.3.
Gambar 4.2Skenario Aliran Informasi Pada Sistem Smart Parking
Hal. 5 dari 33
Kendaraan
Checkpoint(Masuk)
Checkpoint(Keluar)
AreaParkir
Server
Kendaraan
Data Data
Notifikasi
Kendaraan
Deteksi
DeteksiDeteksi
Balas
Data
Notifikasi
1
2
3
45 6
7
8
9
13
10
15
16
11
1412
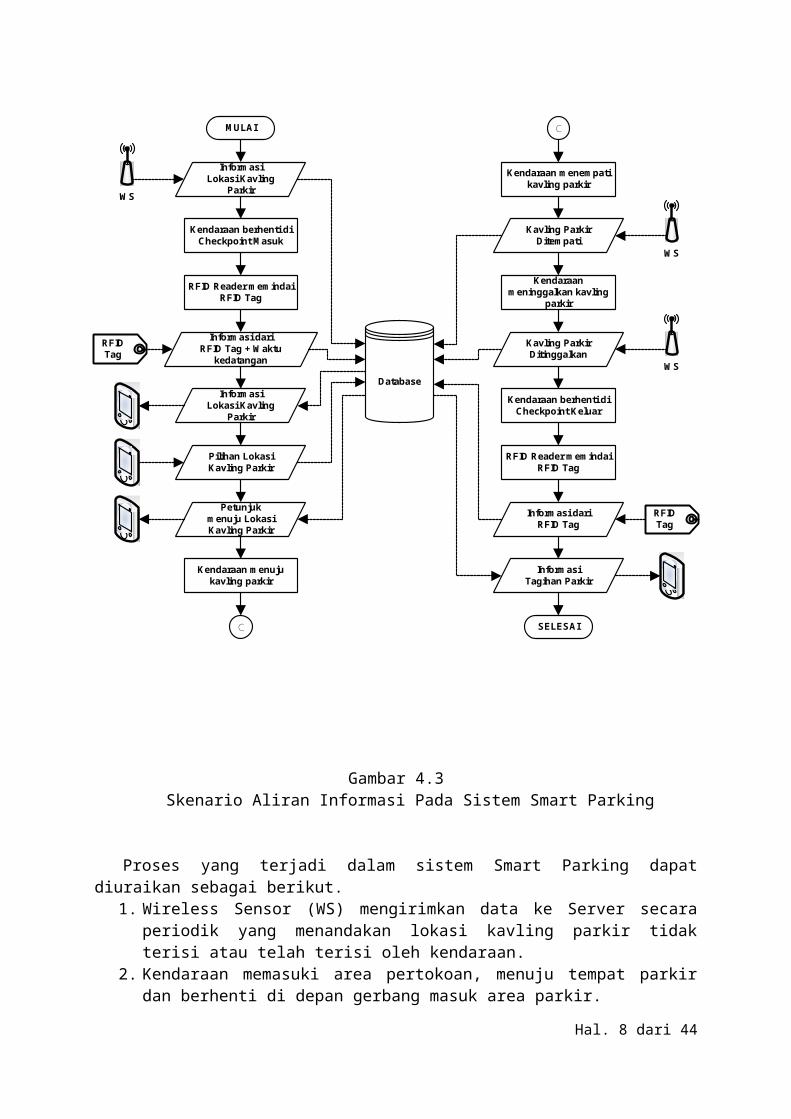
Gambar 4.3Skenario Aliran Informasi Pada Sistem Smart Parking
Proses yang terjadi dalam sistem Smart Parking dapat diuraikan sebagai berikut.1. Wireless Sensor (WS) mengirimkan data ke Server secara periodik yang menandakan
lokasi kavling parkir tidak terisi atau telah terisi oleh kendaraan.2. Kendaraan memasuki area pertokoan, menuju tempat parkir dan berhenti di depan
gerbang masuk area parkir.3. RFID Reader yang terdapat pada gerbang masuk area parkir akan memindai RFID Tag
pada kendaraan dan pengguna 4. Data dari RFID Tag yang dipindai oleh RFID Reader dikirmkan melalui Mini CPU ke
Server kemudian Server akan menyimpan data tersebut ke database ditambahkan dengan data waktu kedatangan kendaraan.
5. Server mengirimkan data melalui jaringan WiFi ke telepon selular pengguna/pemilik kendaraan berupa informasi lokasi kavling parkir yang masih kosong/tersedia dengan tampilan informasi berupa teks serta pilihan untuk menentukan lokasi kavling parkir yang dinginkan.
Hal. 6 dari 33
MULAI
Kendaraan berhenti di Checkpoint Masuk
Informasi Lokasi Kavling
Parkir
RFID Reader memindai RFID Tag
Database
Pilihan Lokasi Kavling Parkir
Informasi Tagihan Parkir
Petunjuk menuju Lokasi Kavling Parkir
WS
c
Informasi dari RFID Tag + Waktu
kedatangan
RFID Tag
Informasi Lokasi Kavling
Parkir
c
Kendaraan menuju kavling parkir
SELESAI
Kendaraan berhenti di Checkpoint Keluar
RFID Reader memindai RFID Tag
Informasi dari RFID Tag
RFID Tag
Kavling Parkir Ditempati
WS
Kendaraan menempati kavling parkir
Kavling Parkir Ditinggalkan
WS
Kendaraan meninggalkan kavling
parkir
6. Pengguna memilih lokasi kavling parkir yang diinginkan kemudian pilihan lokasi kavling tersebut dikirimkan ke server dan server akan menandai kavling parkir yang telah dipilih sebagai kavling yang telah dipesan.
7. Server mengirimkan informasi ke telepon selular pengguna berupa konfirmasi lokasi kavling parkir yang telah dipesan dan petunjuk arah menuju lokasi kavling parkir dengan tampilan informasi berupa teks dan gambar peta lokasi kavling parkir.
8. Kendaraan menuju lokasi kavling parkir kemudian menempati kavling yang telah dipilih.
9. Wireless Sensor mendeteksi bahwa lokasi kavling telah ditempati oleh kendaraan.10. Wireless Sensor akan mengirimkan data ke Server yang menandakan kavling parkir
telah ditempati oleh kendaraan.11. Kendaraan meninggalkan kavling parkir dan menuju ke gerbang keluar.12. Wireless Sensor mendeteksi bahwa lokasi kavling telah ditinggalkan oleh kendaraan
kemudian mengirimkan data ke Server yang menandakan kavling parkir tidak lagi ditempati oleh kendaraan.
13. Kendaraan berada di gerbang keluar area parkir.14. RFID Reader yang terdapat pada gerbang masuk area parkir akan memindai RFID Tag
pada kendaraan dan pengguna. 15. Data dari RFID Tag yang dipindai oleh RFID Reader dikirmkan melalui Mini CPU ke
Server kemudian Server akan mencocokkan data tersebut dengan data yang terdapat pada database.
16. Server mengirimkan data melalui jaringan WiFi ke telepon selular pengguna/pemilik kendaraan berupa informasi lama waktu parkir serta biaya yang harus dibayarkan dengan tampilan informasi berupa teks.
17. Pengguna kendaraan membayar biaya parkir dan meninggalkan area parkir.
5. Smart Parking dan Karakteristik Komputasi Pervasive
Komputasi Pervasive memiliki empat karakteriktis utama yaitu penggunaan ruang pintar yang efektif (Smart Spaces), Invisibility atau tidak terlihat, lokalisasi skalabilitas (Localized Scalability), dan menutupi pengkondisian tidak seimbang pada lingkungan (Masking of Uneven Condition).
Agar sistem Smart Parking dapat dikatakan sebagai implementasi komputasi pervasive maka sistem Smart Parking harus memenuhi persyaratan karakteristik komputasi pervasive.
Hubungan sistem Smart Parking dengan karakteristik komputasi pervasive dapat diuraikan sebagai berikut.
Penggunaan Ruang Pintar Yang Efektif (Smart Spaces)Perangkat pendukung sistem Smart Parking diintegrasikan dengan lingkungan yang telah ada pada sistem parkir konvensional sehingga keberadaan perangkat Smart Parking dapat menyatu dengan lingkungan sistem parkir konvensional dan keberadaannya tidak dirasakan oleh para pengguna kendaraan. Smart Parking dapat mendeteksi keberadaan pengguna dan kendaraan kemudian memberikan informasi dan layanan yang dibutuhkan tanpa adanya/didahului dengan permintaan dari pengguna kendaraan
Hal. 7 dari 33
InvisibilityDengan menggunakan perangkat RFID dan Wireless Sensor dengan ukuran atau dimensi yang kecil kemudian diintegrasikan dengan peralatan yang biasa digunakan sehari-hari, keberadaan perangkat pendukung Smart Parking tidak akan terlihat secara langsung oleh pengguna kendaraan
Lokalisasi Skalabilitas (Localized Scalability)Selama kendaraan milik pengguna berada di area parkir dan menempati kavling parkir serta pengguna masih berada di lingkungan gedung pertokoan atau perkantoran yang tercakup oleh sistem Smart Parking, pengguna dapat memperoleh dan menikmati seluruh layanan yang disajikan oleh Smart Parking. Jika kendaraan dan pengguna keduanya bersamaan meninggalkan area parkir, maka pengguna tidak lagi mendapatkan layanan Smart Parking.
Menutupi Pengkondisian Tidak Seimbang Pada Lingkungan (Masking Uneven Conditioning)Smart Parking menyajikan dua pilihan penyampaian informasi yaitu melalui jaringan WiFi dan melalui jaringan Selular dalam bentuk sms, jika jaringan WiFi sedang mengalami gangguan, maka layanan tetap dapat diperoleh melalui sms, begitu pula sebaliknya.
6. Simulasi Smart Parking Menggunakan NS2
Simulasi sistem Smart Parking bertujuan untuk memperoleh tampilan proses yang terjadi pada sistem Smart Parking dan memperoleh Throughput dari masing-masing elemen pada sistem.
Simulasi dilakukan menggunakan perangkat lunak Network Simulator NS2 dan NS2 Visual Trace Analyzer.
6.1 Ruang Lingkup Simulasi
Lingkungan dan ruang lingkup simulasi untuk sistem Smart Sistem adalah sebagai berikut.
Area Parkir seluas 500 x 500 meter 1 unit Server → Node 0 5 lokasi Kavling Parkir
kav 1 → Node 1kav 2 → Node 2kav 3 → Node 3kav 4 → Node 4kav 5 → Node 5
Gerbang Masuk → Node 6 Gerbang Keluar → Node 7 3 unit Kendaraan
mobil 1 → Node 8mobil 2 → Node 9mobil 3 → Node 10
Asumsi waktu dalam simulasi (nilai rata-rata)• Waktu tunggu di gerbang masuk dan gerbang keluar : 2 detik
Hal. 8 dari 33
• Waktu bergerak dari gerbang masuk menuju kavling parkir : 143 detik (jarak tempuh 697 meter)
• Lama menempati kavling parkir : 4 – 117 detik• Waktu bergerak dari kavling parkir menuju gerbang keluar : 177 detik (jarak
tempuh 617 meter) Total Waktu Simulasi : 739 Detik atau +/- 12 Menit Bandwidth sistem : 2 Mbit Packet Size : 768 KBytes
6.2 Skenario Simulasi
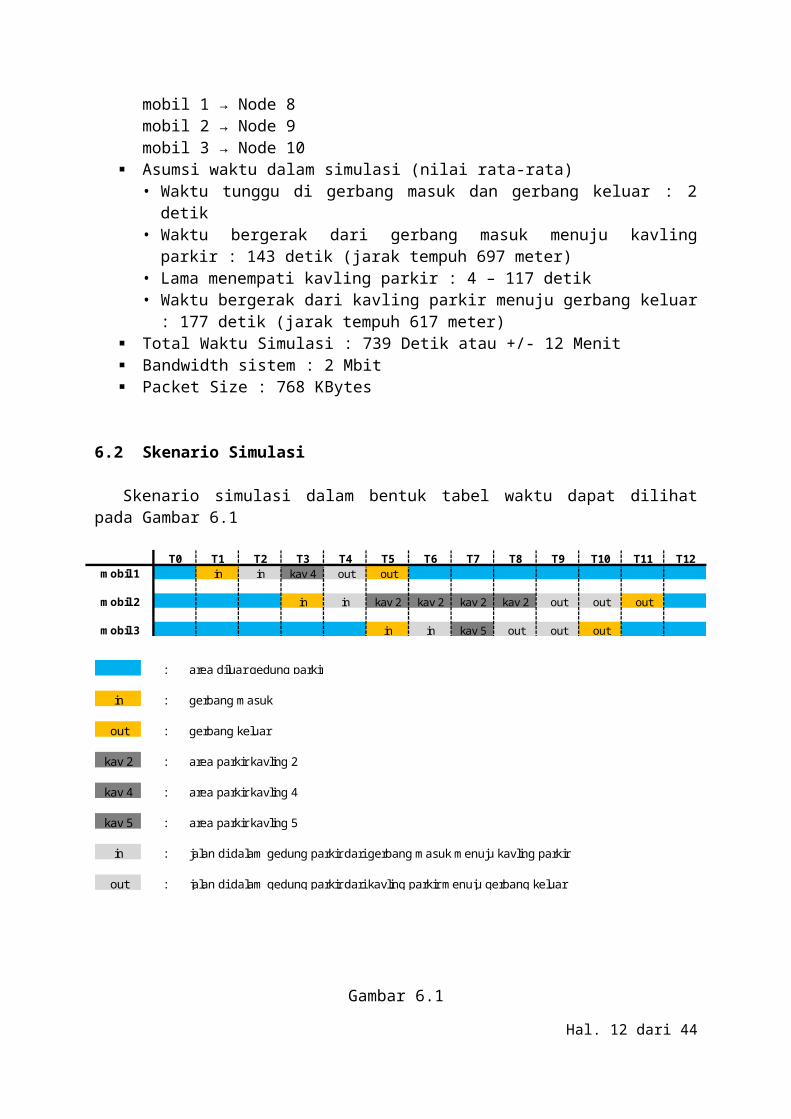
Skenario simulasi dalam bentuk tabel waktu dapat dilihat pada Gambar 6.1
Gambar 6.1Tabel Waktu Skenario Simulasi Sistem Smart Parking
Dalam simulasi sistem Smart Parking, waktu direpresentasikan dengan notasi T0, T1, T2, dan seterusnya. Skenario simulasi sistem Smart Parking dapat diuraikan sebagai berikut.
Pada saat waktu T0, seluruh kendaraan berada diluar area gedung parkir. Pada waktu T1, Mobil 1 memasuki area parkir dan berhenti di gerbang masuk. Pada waktu T2, Mobil 1 bergerak dari gerbang masuk menuju kavling parkir, dalam
hal ini, lokasi kavling parkir yang telah dipilih adalah kavling nomor 4 (kav 4). Pada waktu T3, Mobil 1 telah menempati kavling parkir kav 4 dan pada saat yang
sama, Mobil 2 memasuki area parkir dan berhenti di gerbang masuk. Pada waktu T4, Mobil 1 meninggalkan kavling parkir kav 4 menuju gerbang keluar
dan pada saat yang sama Mobil 2 bergerak dari gerbang masuk menuju kavling parkir kav2.
Hal. 9 dari 33
T0 T1 T2 T3 T4 T5 T6 T7 T8 T9 T10 T11 T12mobil 1 in in kav 4 out out
mobil 2 in in kav 2 kav 2 kav 2 kav 2 out out out
mobil 3 in in kav 5 out out out
: area diluar gedung parkir
in : gerbang masuk
out : gerbang keluar
kav 2 : area parkir kavling 2
kav 4 : area parkir kavling 4
kav 5 : area parkir kavling 5
in : jalan di dalam gedung parkir dari gerbang masuk menuju kavling parkir
out : jalan di dalam gedung parkir dari kavling parkir menuju gerbang keluar
Pada waktu T5, Mobil 1 berada di gerbang keluar. Pada saat yang sama Mobil 2 telah menempati kav 2 dan Mobil 3 memasuki area gedung parkir dan berhenti di gerbang masuk.
Pada waktu T6, Mobil 1 telah keluar dari area gedung parkir. Pada saat yang sama, Mobil 3 bergerak dari gerbang masuk menuju kav 5 dan Mobil 2 masih menempati kav 2.
Pada waktu T7, Mobil 3 telah menempati kav 5 dan Mobil 2 masih menempati kav 2. Pada waktu T8, Mobil 3 bergerak meninggalkan kav 5 menuju gerbang keluar. Pada
saat yang sama, Mobil 2 masih menempati kav 2. Pada waktu T9, Mobil 2 bergerak meninggalkan kav 2 dan pada saat yang sama Mobil
3 masih bergerak menuju gerbang keluar. Pada waktu T10, Mobil 3 telah berada di gerbang keluar dan pada saat yang sama
Mobil 2 masih bergerak menuju gerbang keluar. Pada waktu T11, Mobil 3 telah meninggalkan area gedung parkir dan pada saat yang
sama Mobil 2 berada di gerbang keluar. Pada waktu T12, seluruh mobil telah keluar dari area gedung parkir.
6.3 Penjelasan Skrip Simulasi .tcl
Skrip tcl ini (skrip lengkap tersaji pada bagian Lampiran) merupakan skrip utama untuk melakukan simulasi jaringan. Skrip dibuat untuk menyimulasikan sistem parkir dengan area 500 m x 500 m. Lingkungan simulasi pada skrip .tcl adalah sebagai berikut:
sebuah server (node_(0)), lima tempat parkir (node_(1) s.d. (5)), dua gerbang parkir (node_(6) dan (7)), dan tiga buah mobil (node_(8) s.d. (9)).
Jarak terjauh saat terjadi transmisi data adalah saat mobil melewati gerbang masuk maupun keluar dimana server mengirim data ke mobil tersebut. Jarak terjauh tersebut adalah node_(0) (250,200) dengan node mobil (10,50) yaitu akar dari ((250-10)2+(200-50)2) = √(80100) = 283.019 m sehingga diperlukan pemancar dan penerima dengan jangkauan minimal 283.019 m. Dalam simulasi ini digunakan jarak 300 m.
Dengan menggunakan parameter lainnya default, jarak 300 m, dan jenis propagasi TwoRayGround dengan maka menggunakan aplikasi yang sudah ada pada simulator ns-2.34 (memerlukan kompilasi terlebih dahulu sebelum digunakan) akan diperoleh hasil sebagai berikut:
student@jkl:/usr/local/ns-allinone-2.34/ns-2.34/indep-utils/propagation$ ./threshold -m TwoRayGround 300distance = 300propagation model: TwoRayGround
Selected parameters:transmit power: 0.281838frequency: 9.14e+08transmit antenna gain: 1receive antenna gain: 1system loss: 1transmit antenna height: 1.5receive antenna height: 1.5
Receiving threshold RXThresh_ is: 1.76149e-10
Hal. 10 dari 33
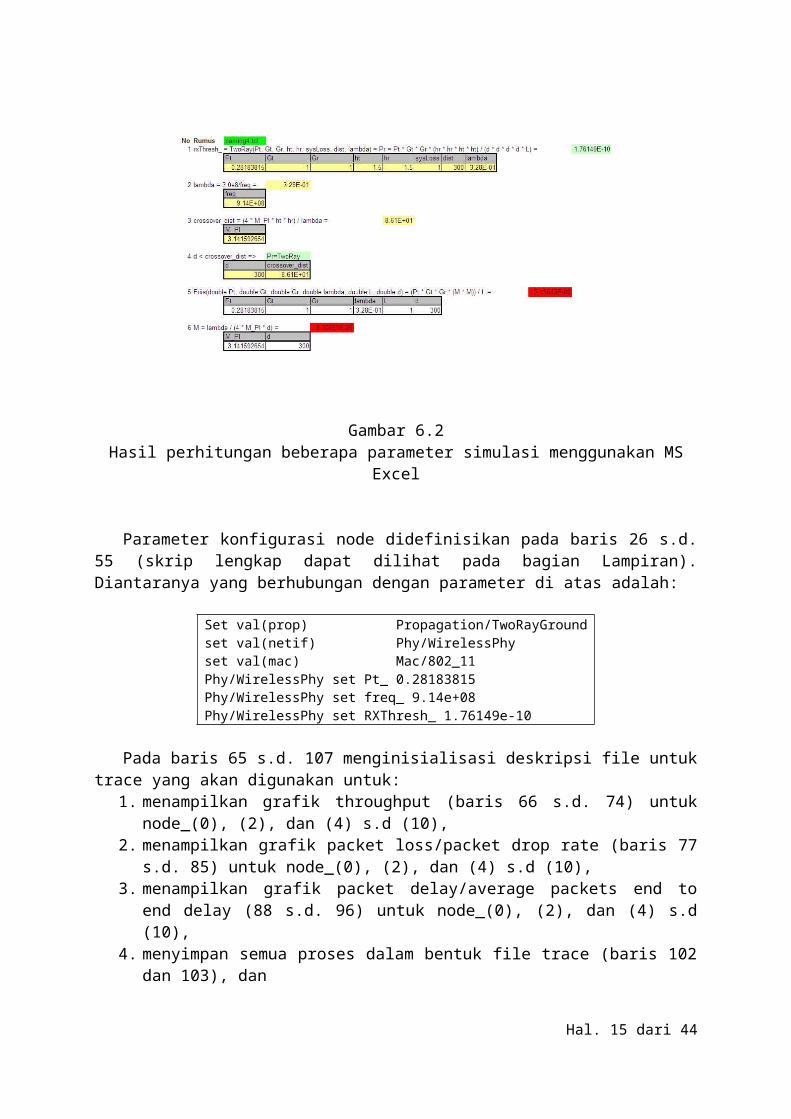
Hasil yang diperoleh melalui NS2 juga dapat diperoleh menggunakan MS Excel dan diperoleh hasil yang sama. Hasil dari MS Excel dapat dilihat pada Gambar 6.2.
Gambar 6.2Hasil perhitungan beberapa parameter simulasi menggunakan MS Excel
Parameter konfigurasi node didefinisikan pada baris 26 s.d. 55 (skrip lengkap dapat dilihat pada bagian Lampiran). Diantaranya yang berhubungan dengan parameter di atas adalah:
Set val(prop) Propagation/TwoRayGroundset val(netif) Phy/WirelessPhyset val(mac) Mac/802_11Phy/WirelessPhy set Pt_ 0.28183815Phy/WirelessPhy set freq_ 9.14e+08Phy/WirelessPhy set RXThresh_ 1.76149e-10
Pada baris 65 s.d. 107 menginisialisasi deskripsi file untuk trace yang akan digunakan untuk:
1. menampilkan grafik throughput (baris 66 s.d. 74) untuk node_(0), (2), dan (4) s.d (10),2. menampilkan grafik packet loss/packet drop rate (baris 77 s.d. 85) untuk node_(0), (2),
dan (4) s.d (10),3. menampilkan grafik packet delay/average packets end to end delay (88 s.d. 96) untuk
node_(0), (2), dan (4) s.d (10),4. menyimpan semua proses dalam bentuk file trace (baris 102 dan 103), dan5. menyimpan semua proses dalam bentuk file nam agar bisa disimulasikan pada
simulator nam (baris 106 dan 107).
Selanjutnya untuk mengatur topografi pengamatan maka diperlukan pengaturan topografi dan jumlah node yang diamati yaitu pada baris 109 s.d. 115.
Sebelum membuat node perlu dilakukan konfigurasi awal terlebih dahulu. API konfigurasi node terdiri dari mendefinisikan pengalamatan (flat/hierarki dan lain-lain), jenis protokol routing adhoc, Link Layer, MAC layer, IfQ dan sebagainya. Konfigurasi API yang digunakan ada pada baris 118 s.d. 131.
Hal. 11 dari 33
Membuat 11 node ada pada baris 134 s.d. 137. "random-motion" dibuat tidak berfungsi karena letak dan gerakan node akan ditentukan berikutnya (tidak random). Berikutnya menentukan letak awal node, yaitu pada baris 162 s.d. 204. Terlihat bahwa letak node_(0) awal adalah (250, 200, 1.5). Berikutnya beberapa node (node_(8), node_(9), dan node_(10)) melakukan gerakan, yaitu pada baris 209 s.d. 240. Berikutnya mengatur aliran data pada node-node yang sudah ditentukan, yaitu pada baris 247 s.d. 527.
Berikutnya adalah menyiapkan prosedur untuk menyimpan data yang diperlukan (throughput, delay, dan drop) agar bisa ditampilkan pada grafik, yaitu pada baris 535 s.d. 748. Diperlukan untuk menentukan kapan waktu simulasi berakhir dan node di-reset, yaitu pada baris 751 s.d. 806. Dapat dilihat bahwa simulasi harus berhenti pada $val(stop) atau detik 740. Node di-reset pada waktu tersebut dan "$ns_ halt" dipanggil pada [expr $val(stop) + 0.01] atau detik 740.01. Prosedur stop dipanggil untuk menampilkan grafik (throughput, delay, dan drop), mem-flush out trace, menutup file trace, dan menjalankan nam. Akhirnya perintah untuk memulai simulasi, yaitu pada baris 809.
Untuk memudahkan mengganti beberapa parameter maka di awal program akan ditanyakan (baris 3 s.d. 20):
1. ukuran paket (PacketSize, 128/256/512/768/1024 atau terserah) dalam byte,2. selang waktu (Interval, 0.1/0.5/0.2/0.01 atau terserah) dalam detik,3. konversi satuan (konversi, K/M, K untuk Kilo dan M untuk Mega), dan4. ukuran paket minimal agar dikirim (RTSThreshold, 500/1000/2000/3000 atau
terserah) dalam byte
6.4 Keluaran Simulasi dan Analisa Skrip .tcl Menggunakan NS2
Untuk menjalankan skrip simulasi .tcl, diperlukan 4 parameter simulasi yaitu: ukuran paket, dinotasikan dengan up selang waktu, dinotasikan dengan sw konversi satuan, dinotasikan dengan ks ukuran paket minimal, dinotasikan dengan upmin
Skrip dapat dijalankan dengan mengetikkan perintah dengan format sebagai berikut.
$ ns nama_file up sw ks upmin
Dalam simulasi Smart Parking, digunakan dua skenario parameter simulasi sebagai berikut.
Skenario 1 dengan parameter simulasi :- ukuran paket = 512 Byte- selang waktu = 0,1 detik- konversi satuan = K (untuk KiloByte)- ukuran paket minimal = 3000 Byte
Skenario 2 dengan parameter simulasi :- ukuran paket = 768 Byte- selang waktu = 0,1 detik- konversi satuan = K (untuk KiloByte)- ukuran paket minimal = 500 Byte
Hal. 12 dari 33
6.4.1 Simulasi Skenario 1
Parameter simulasi pada skenario 1 adalah sebagai berikut.- ukuran paket = 512 Byte- selang waktu = 0,1 detik- konversi satuan = K (untuk KiloByte)- ukuran paket minimal = 3000 Byte
File simulasi .tcl yang akan dijalankan adalah parking4.tcl. Untuk menjalankan simulasi file parking4.tcl dengan parameter simulasi skenario 1, ketikkan perintah sebagai berikut.
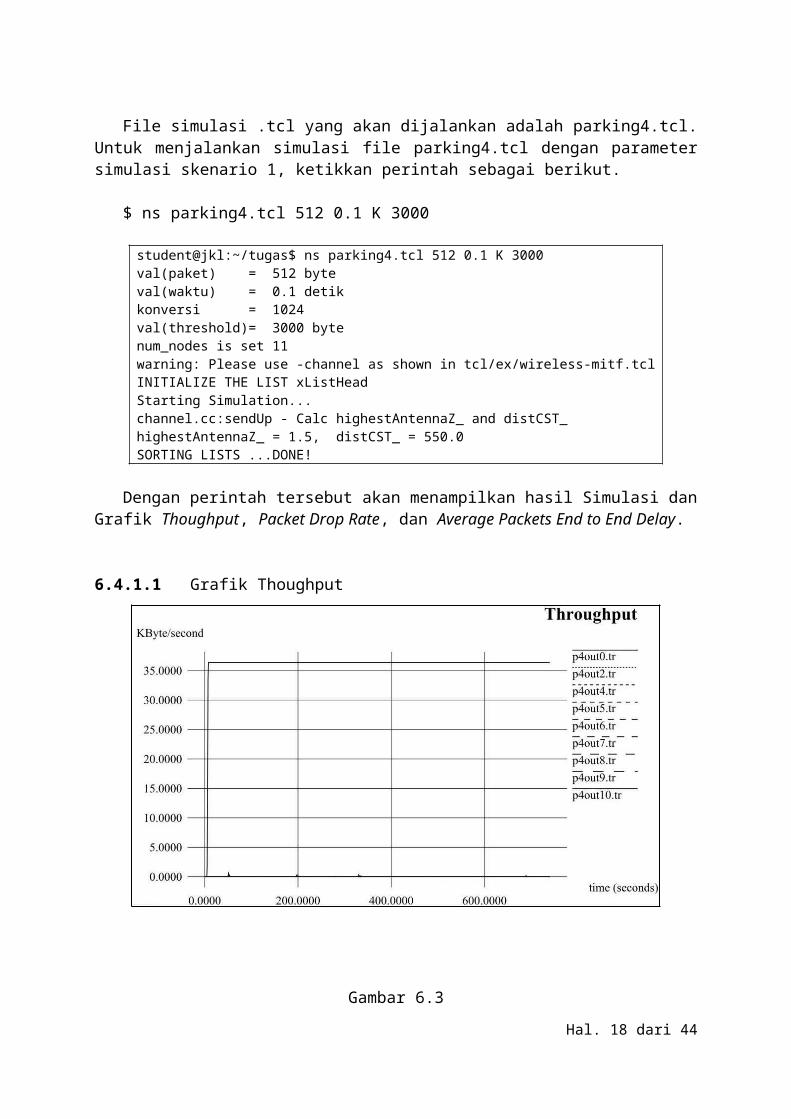
$ ns parking4.tcl 512 0.1 K 3000
student@jkl:~/tugas$ ns parking4.tcl 512 0.1 K 3000val(paket) = 512 byteval(waktu) = 0.1 detikkonversi = 1024val(threshold)= 3000 bytenum_nodes is set 11warning: Please use -channel as shown in tcl/ex/wireless-mitf.tclINITIALIZE THE LIST xListHeadStarting Simulation...channel.cc:sendUp - Calc highestAntennaZ_ and distCST_highestAntennaZ_ = 1.5, distCST_ = 550.0SORTING LISTS ...DONE!
Dengan perintah tersebut akan menampilkan hasil Simulasi dan Grafik Thoughput, Packet Drop Rate, dan Average Packets End to End Delay.
6.4.1.1 Grafik Thoughput
Gambar 6.3Throughput dengan parameter masukan 512/0.1/K/3000
Hal. 13 dari 33
Dari Gambar 6.3 dapat dilihat bahwa dari detik ke-0 hingga detik ke-5 belum ada data yang diterima oleh server (p4out0.tr). Data pertama diterima saat detik 5.1 dimana tempat parkir pertama mengirim data dengan laju konstan 512 byte/0.1 detik diikuti oleh tempat parkir kedua pada detik 5.2 dengan laju konstan yang sama hingga gerbang parkir kedua pada detik 5.7 dengan laju konstan yang sama. Sehingga setiap detik server menerima data sebesar 7×512 byte/0.1 detik = 35840 byte/detik = 35 Kbyte/detik = 35 KBps. Tetapi jika kita perhatikan pada file parking4.tr terlihat bahwa data yang diterima terkadang berukuran 532 byte, tidak selalu 512 byte. Jika menggunakan 532 byte, maka diperoleh 37240 byte/detik = 36.3671875 KBps. Hasil yang sama bisa dilihat pada file p4out0.tr. Hasil di atas merupakan throughput rata-rata.
6.4.1.2 Grafik Packet Drop Rate
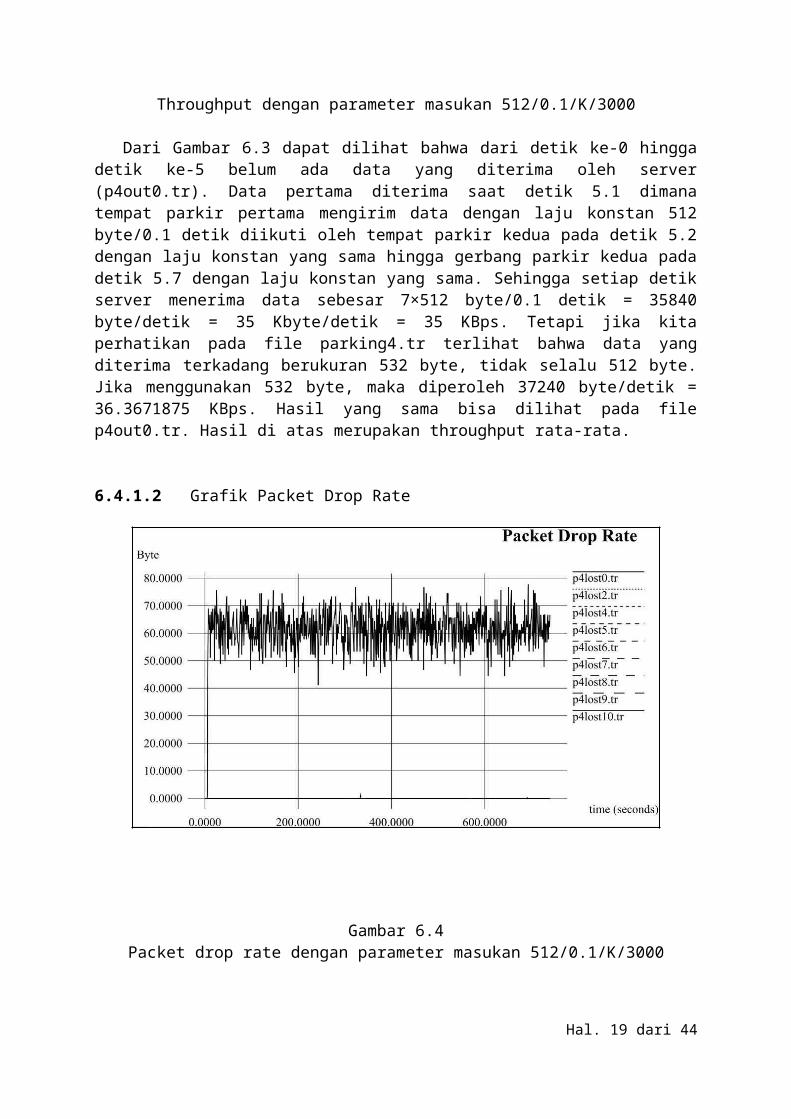
Gambar 6.4Packet drop rate dengan parameter masukan 512/0.1/K/3000
Dari Gambar 6.4 dapat dilihat bahwa rata-rata laju paket yang “jatuh” adalah kira-kira sedikit di atas 60 byte.
Hal. 14 dari 33
6.4.1.3 Grafik Average Packets End to End Delay
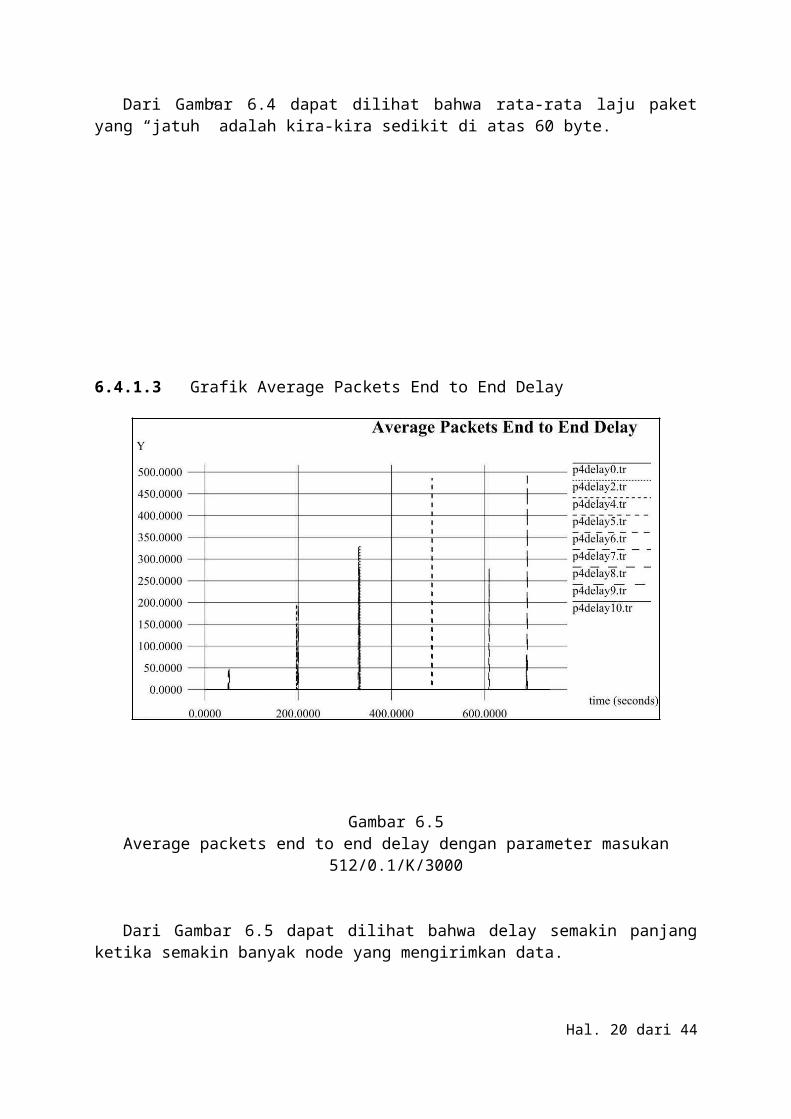
Gambar 6.5Average packets end to end delay dengan parameter masukan 512/0.1/K/3000
Dari Gambar 6.5 dapat dilihat bahwa delay semakin panjang ketika semakin banyak node yang mengirimkan data.
6.4.2 Simulasi Skenario 2
Parameter simulasi pada skenario 2 adalah sebagai berikut.- ukuran paket = 768 Byte- selang waktu = 0,1 detik- konversi satuan = K (untuk KiloByte)- ukuran paket minimal = 500 Byte
File simulasi .tcl yang akan dijalankan adalah parking4.tcl. Untuk menjalankan simulasi file parking4.tcl dengan parameter simulasi skenario 2, ketikkan perintah sebagai berikut.
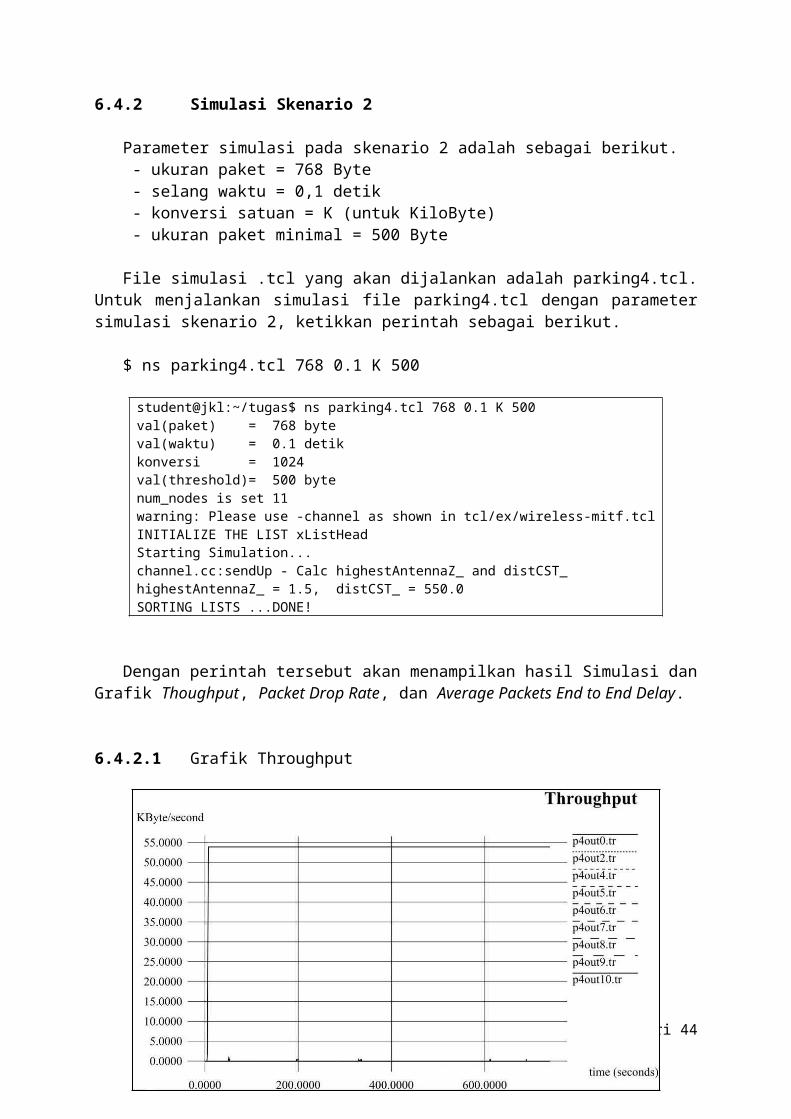
$ ns parking4.tcl 768 0.1 K 500
student@jkl:~/tugas$ ns parking4.tcl 768 0.1 K 500val(paket) = 768 byteval(waktu) = 0.1 detikkonversi = 1024val(threshold)= 500 bytenum_nodes is set 11warning: Please use -channel as shown in tcl/ex/wireless-mitf.tclINITIALIZE THE LIST xListHeadStarting Simulation...channel.cc:sendUp - Calc highestAntennaZ_ and distCST_
Hal. 15 dari 33
highestAntennaZ_ = 1.5, distCST_ = 550.0SORTING LISTS ...DONE!
Dengan perintah tersebut akan menampilkan hasil Simulasi dan Grafik Thoughput, Packet Drop Rate, dan Average Packets End to End Delay.
6.4.2.1 Grafik Throughput
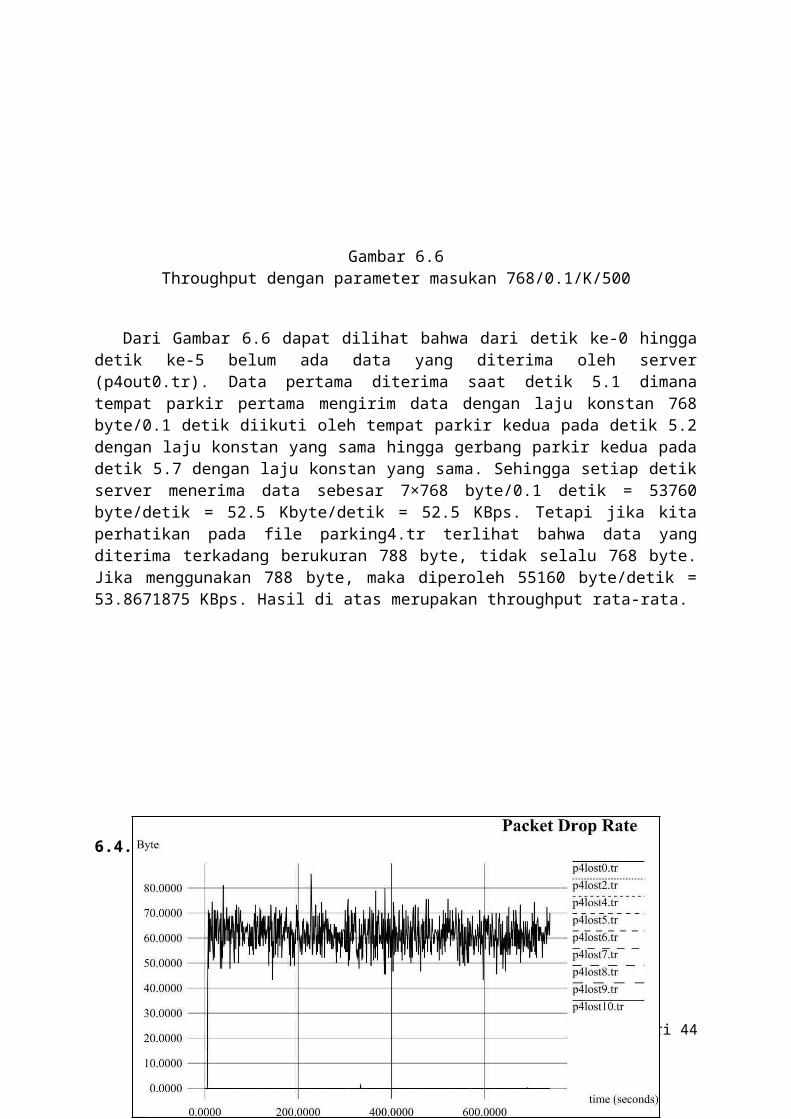
Gambar 6.6Throughput dengan parameter masukan 768/0.1/K/500
Dari Gambar 6.6 dapat dilihat bahwa dari detik ke-0 hingga detik ke-5 belum ada data yang diterima oleh server (p4out0.tr). Data pertama diterima saat detik 5.1 dimana tempat parkir pertama mengirim data dengan laju konstan 768 byte/0.1 detik diikuti oleh tempat parkir kedua pada detik 5.2 dengan laju konstan yang sama hingga gerbang parkir kedua pada detik 5.7 dengan laju konstan yang sama. Sehingga setiap detik server menerima data sebesar 7×768 byte/0.1 detik = 53760 byte/detik = 52.5 Kbyte/detik = 52.5 KBps. Tetapi jika kita perhatikan pada file parking4.tr terlihat bahwa data yang diterima terkadang berukuran 788 byte, tidak selalu 768 byte. Jika menggunakan 788 byte, maka diperoleh 55160 byte/detik = 53.8671875 KBps. Hasil di atas merupakan throughput rata-rata.
Hal. 16 dari 33
6.4.2.2 Grafik Packet Drop Rate
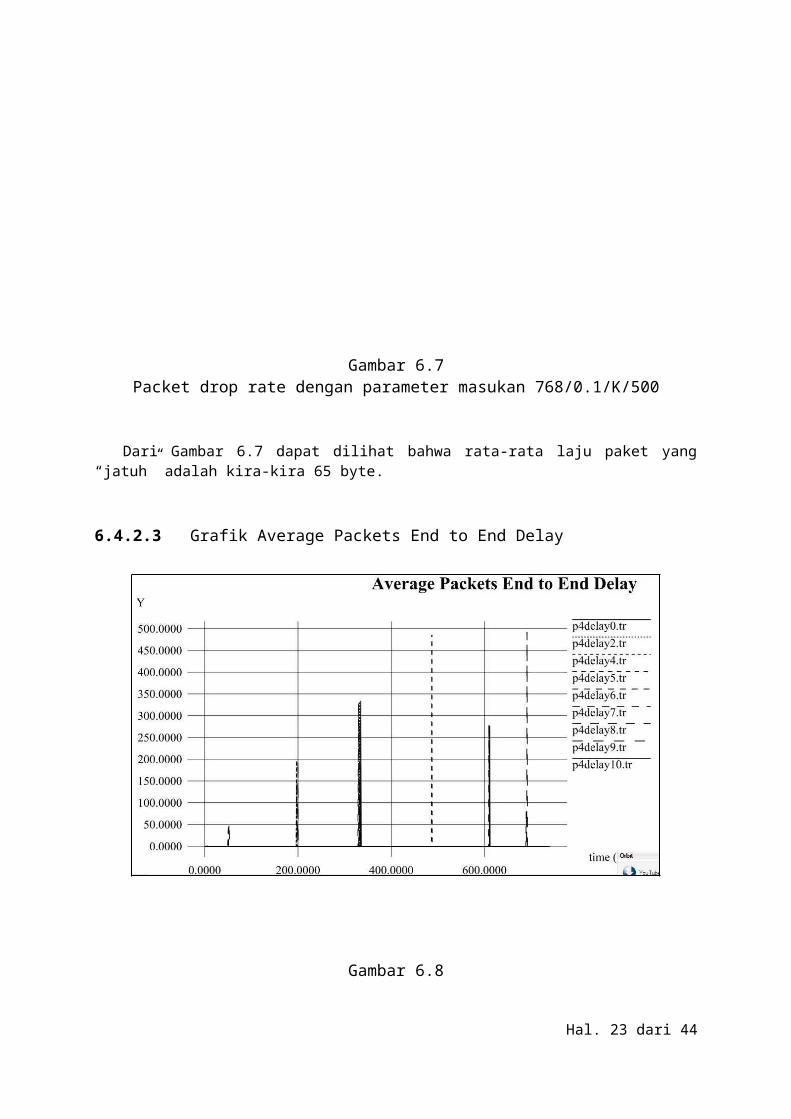
Gambar 6.7Packet drop rate dengan parameter masukan 768/0.1/K/500
Dari Gambar 6.7 dapat dilihat bahwa rata-rata laju paket yang “jatuh” adalah kira-kira 65 byte.
6.4.2.3 Grafik Average Packets End to End Delay
Gambar 6.8Average packets end to end delay dengan parameter masukan 768/0.1/K/500
Hal. 17 dari 33
Dari Gambar 6.8 dapat dilihat bahwa delay semakin panjang jika semakin banyak node yang mengirimkan data.
6.5 Keluaran Simulasi dan Analisa Skrip .awk Menggunakan NS2
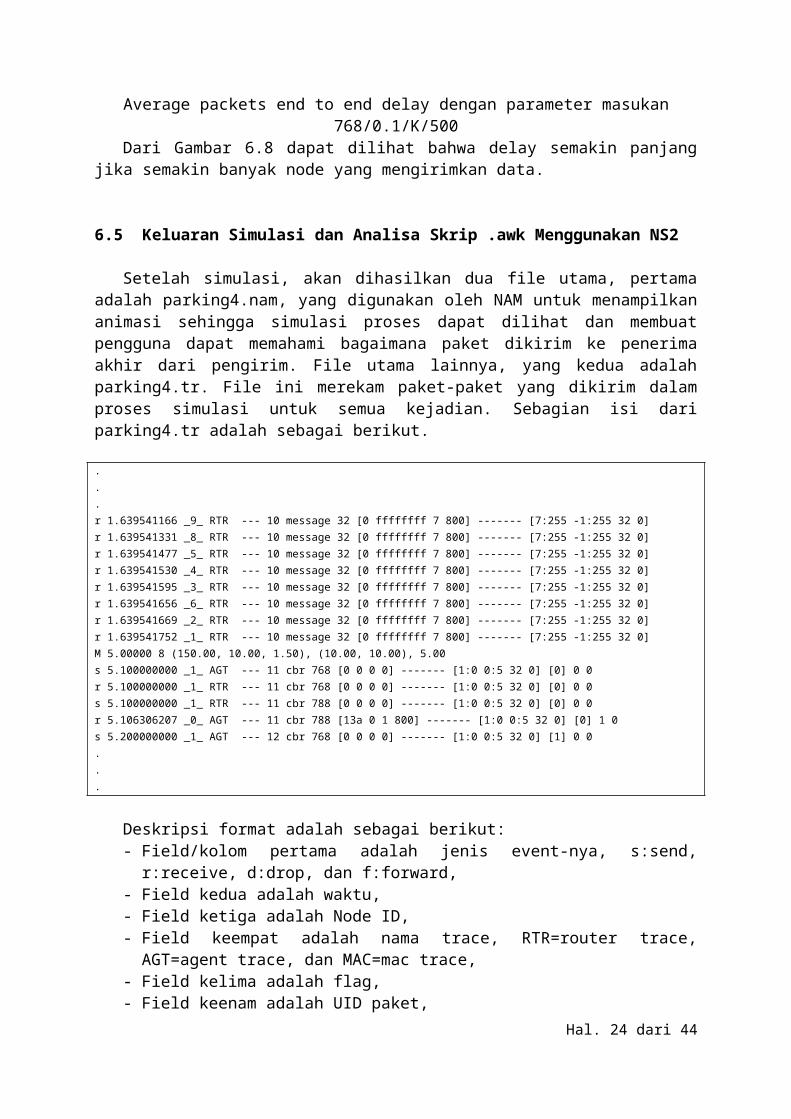
Setelah simulasi, akan dihasilkan dua file utama, pertama adalah parking4.nam, yang digunakan oleh NAM untuk menampilkan animasi sehingga simulasi proses dapat dilihat dan membuat pengguna dapat memahami bagaimana paket dikirim ke penerima akhir dari pengirim. File utama lainnya, yang kedua adalah parking4.tr. File ini merekam paket-paket yang dikirim dalam proses simulasi untuk semua kejadian. Sebagian isi dari parking4.tr adalah sebagai berikut.
.
.
.r 1.639541166 _9_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] r 1.639541331 _8_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] r 1.639541477 _5_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] r 1.639541530 _4_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] r 1.639541595 _3_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] r 1.639541656 _6_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] r 1.639541669 _2_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] r 1.639541752 _1_ RTR --- 10 message 32 [0 ffffffff 7 800] ------- [7:255 -1:255 32 0] M 5.00000 8 (150.00, 10.00, 1.50), (10.00, 10.00), 5.00s 5.100000000 _1_ AGT --- 11 cbr 768 [0 0 0 0] ------- [1:0 0:5 32 0] [0] 0 0r 5.100000000 _1_ RTR --- 11 cbr 768 [0 0 0 0] ------- [1:0 0:5 32 0] [0] 0 0s 5.100000000 _1_ RTR --- 11 cbr 788 [0 0 0 0] ------- [1:0 0:5 32 0] [0] 0 0r 5.106306207 _0_ AGT --- 11 cbr 788 [13a 0 1 800] ------- [1:0 0:5 32 0] [0] 1 0s 5.200000000 _1_ AGT --- 12 cbr 768 [0 0 0 0] ------- [1:0 0:5 32 0] [1] 0 0...
Deskripsi format adalah sebagai berikut:- Field/kolom pertama adalah jenis event-nya, s:send, r:receive, d:drop, dan f:forward,- Field kedua adalah waktu,- Field ketiga adalah Node ID,- Field keempat adalah nama trace, RTR=router trace, AGT=agent trace, dan
MAC=mac trace,- Field kelima adalah flag,- Field keenam adalah UID paket,- Field ketujuh adalah jenis paket,- Field kedelapan adalah ukuran paket,- Field keempat belas adalah alamat sumber (dengan bentuk NodeID:PortNumber), dan- Field kelima belas adalah alamat tujuan (dengan bentuk NodeID:PortNumber).
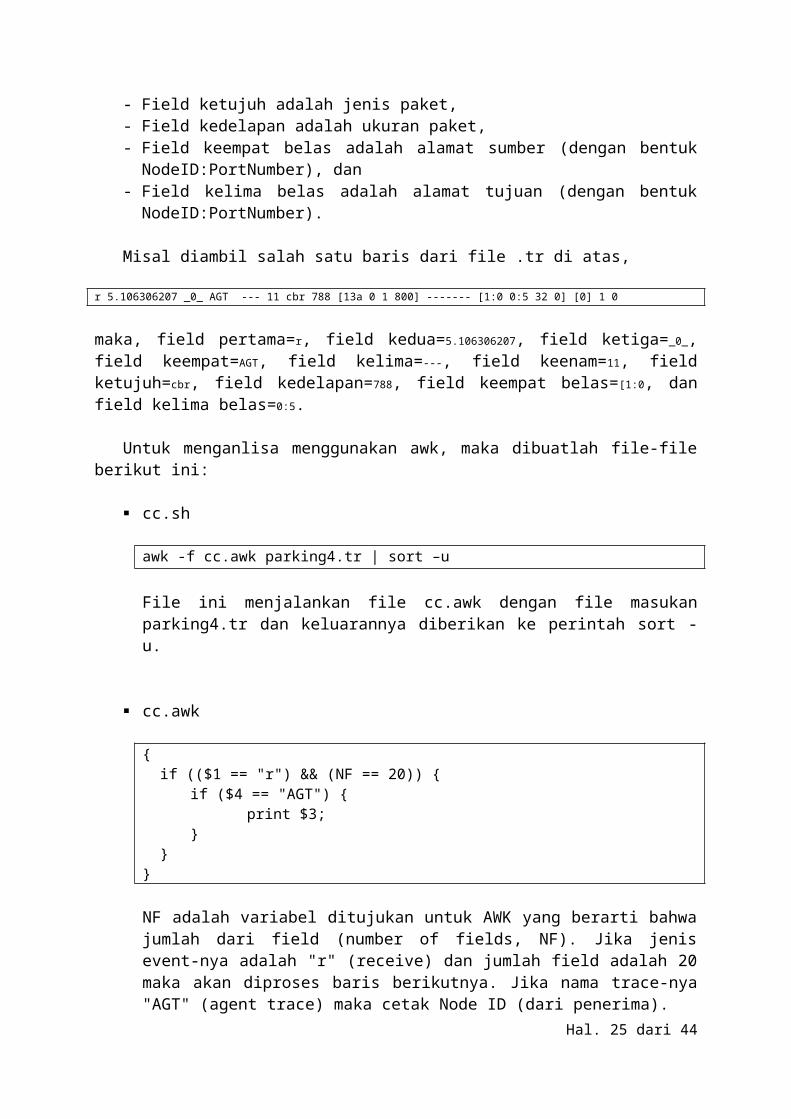
Misal diambil salah satu baris dari file .tr di atas,
r 5.106306207 _0_ AGT --- 11 cbr 788 [13a 0 1 800] ------- [1:0 0:5 32 0] [0] 1 0
maka, field pertama=r, field kedua=5.106306207, field ketiga=_0_, field keempat=AGT, field kelima=---, field keenam=11, field ketujuh=cbr, field kedelapan=788, field keempat belas=[1:0, dan field kelima belas=0:5.
Hal. 18 dari 33
Untuk menganlisa menggunakan awk, maka dibuatlah file-file berikut ini:
cc.sh
awk -f cc.awk parking4.tr | sort –u
File ini menjalankan file cc.awk dengan file masukan parking4.tr dan keluarannya diberikan ke perintah sort -u.
cc.awk
{ if (($1 == "r") && (NF == 20)) {
if ($4 == "AGT") { print $3;
} }}
NF adalah variabel ditujukan untuk AWK yang berarti bahwa jumlah dari field (number of fields, NF). Jika jenis event-nya adalah "r" (receive) dan jumlah field adalah 20 maka akan diproses baris berikutnya. Jika nama trace-nya "AGT" (agent trace) maka cetak Node ID (dari penerima).
st.sh
while read ddo printf "%s \t" $d awk -f st.awk -v dst="$d" parking4.trdone
Variabel d akan membaca hasil dari print $3 (cc.awk) selama masih ada dan kemudian dicetak printf "%s \t" $d. Perintah berikutnya adalah menjalankan file st.awk dengan parameter masukan dst="$d" dan file parking4.tr.
st.awk
BEGIN { total = 0; n = 0;}{ if ($3 == dst) { if (($1 == "r") && ($4 == "AGT")) { if (n == 0) start = $2; total += $8; n += 1; end = $2; }
Hal. 19 dari 33
}}END { if (end == start) { throughput = total / 1024; } else { throughput = total / (end-start) / 1024; } print start, "\t", end, "\t", throughput, "KBps";}
Skrip diawali dengan pemberian nilai awal total = 0 untuk menjumlah semua byte data yang diterima dan n = 0 sebagai tanda awal waktu pengambilan data yang disimpan di start = $2.
Data yang sesuai $3 == dst akan dicek apakah memenuhi $1 == "r" dan $4 == "AGT". Jika merupakan data awal, n == 0, maka start = $2. Kemudian dilakukan proses penjumlahan data total += $8. Nilai n langsung diubah n += 1 supaya tidak mengubah start = $2. Waktu data terakhir diterima disimpan di end = $2.
Jika semua data sudah diproses maka selanjutnya dicetak hasilnya. Jika end == start maka akan dilakukan proses throughput = total / 1024. Jika tidak, maka dilakukan proses throughput = total / (end-start) / 1024. Kemudian hasil dicetak dengan format print start, "\t", end, "\t", throughput, "KBps", yaitu waktu mulai (start), waktu berakhir (end), dan throughput (throughput) dengan satuan KBps karena pada proses sebelumnya dibagi dengan 1024.
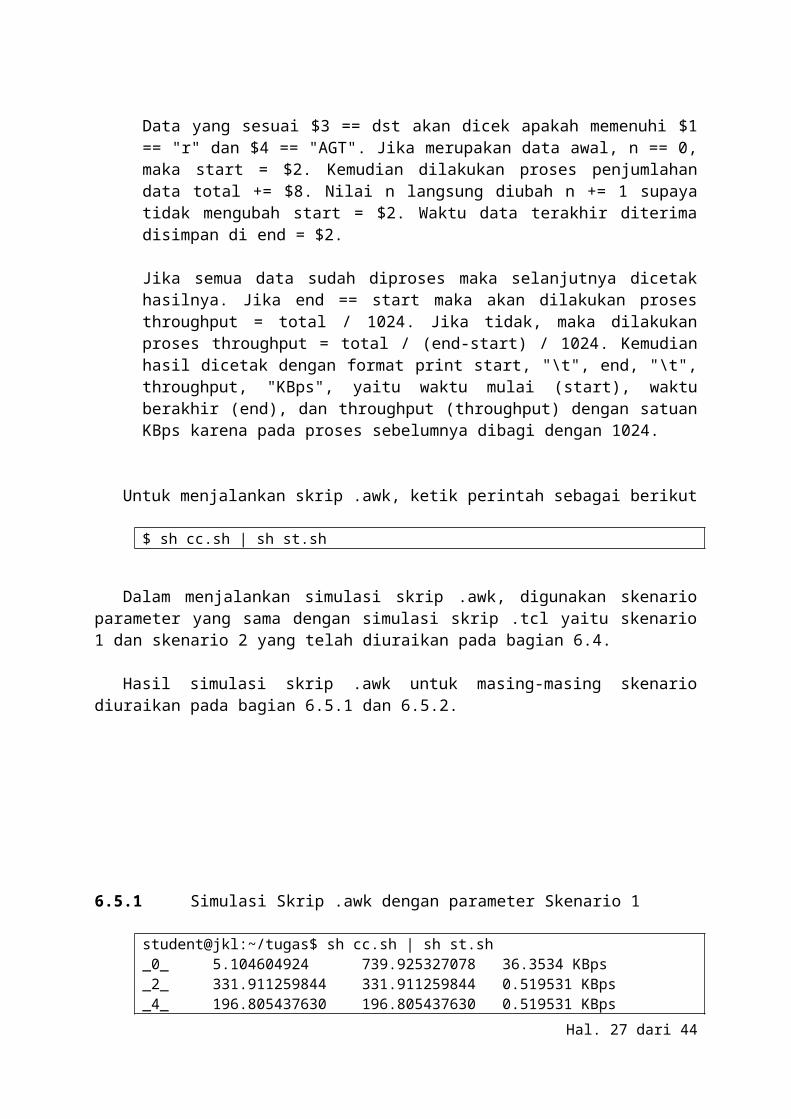
Untuk menjalankan skrip .awk, ketik perintah sebagai berikut
$ sh cc.sh | sh st.sh
Dalam menjalankan simulasi skrip .awk, digunakan skenario parameter yang sama dengan simulasi skrip .tcl yaitu skenario 1 dan skenario 2 yang telah diuraikan pada bagian 6.4.
Hasil simulasi skrip .awk untuk masing-masing skenario diuraikan pada bagian 6.5.1 dan 6.5.2.
Hal. 20 dari 33
6.5.1 Simulasi Skrip .awk dengan parameter Skenario 1
student@jkl:~/tugas$ sh cc.sh | sh st.sh_0_ 5.104604924 739.925327078 36.3534 KBps_2_ 331.911259844 331.911259844 0.519531 KBps_4_ 196.805437630 196.805437630 0.519531 KBps_5_ 486.008368939 486.008368939 0.519531 KBps_6_ 49.811400130 333.014101548 0.0110069 KBps_7_ 328.808518890 690.022725709 0.00862975 KBps_8_ 52.027379979 331.014121576 0.00372442 KBps_9_ 199.030992634 691.017153098 0.00211198 KBps
Terlihat bahwa, misalnya pada node 0/server (_0_), menerima data AGT pertama kali pada detik 5.104604924 dan berakhir pada detik 739.925327078 dengan throughput sebesar 36.3534 KBps. Hasil ini tidak jauh berbeda dengan yang diperoleh dari grafik sebelumnya (Gambar 6.3) dan perhitungan yang sudah dilakukan.
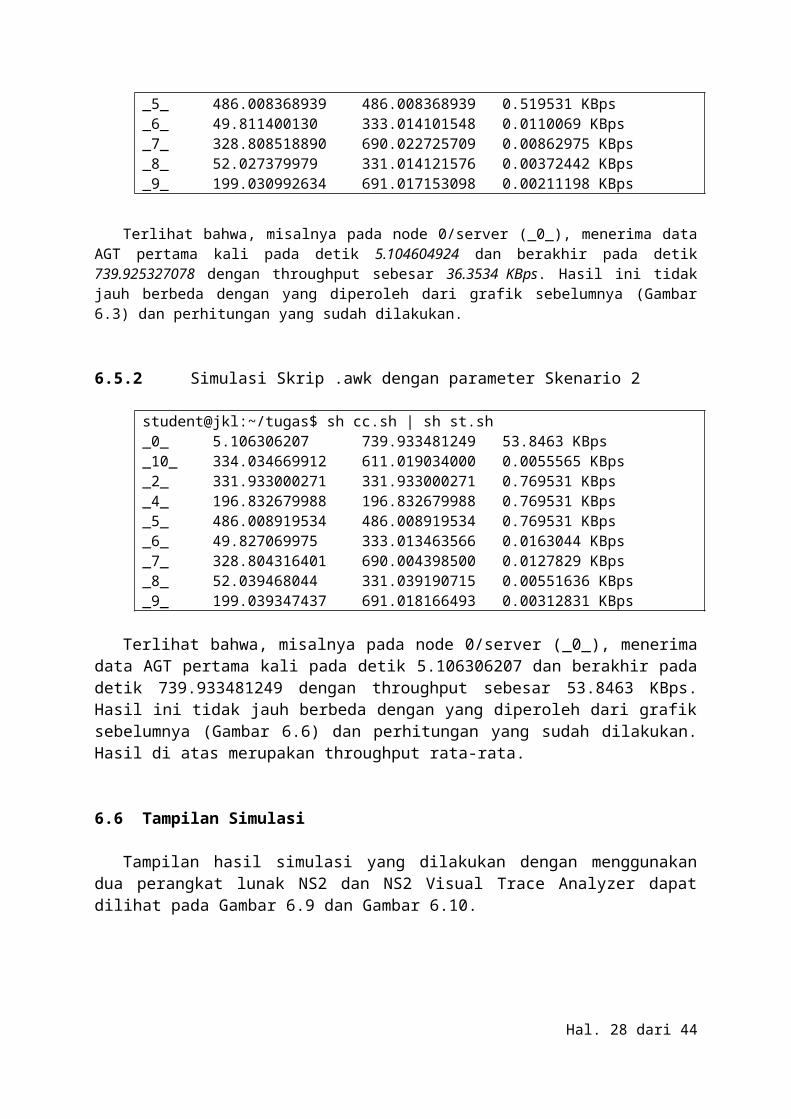
6.5.2 Simulasi Skrip .awk dengan parameter Skenario 2
student@jkl:~/tugas$ sh cc.sh | sh st.sh_0_ 5.106306207 739.933481249 53.8463 KBps_10_ 334.034669912 611.019034000 0.0055565 KBps_2_ 331.933000271 331.933000271 0.769531 KBps_4_ 196.832679988 196.832679988 0.769531 KBps_5_ 486.008919534 486.008919534 0.769531 KBps_6_ 49.827069975 333.013463566 0.0163044 KBps_7_ 328.804316401 690.004398500 0.0127829 KBps_8_ 52.039468044 331.039190715 0.00551636 KBps_9_ 199.039347437 691.018166493 0.00312831 KBps
Terlihat bahwa, misalnya pada node 0/server (_0_), menerima data AGT pertama kali pada detik 5.106306207 dan berakhir pada detik 739.933481249 dengan throughput sebesar 53.8463 KBps. Hasil ini tidak jauh berbeda dengan yang diperoleh dari grafik sebelumnya (Gambar 6.6) dan perhitungan yang sudah dilakukan. Hasil di atas merupakan throughput rata-rata.
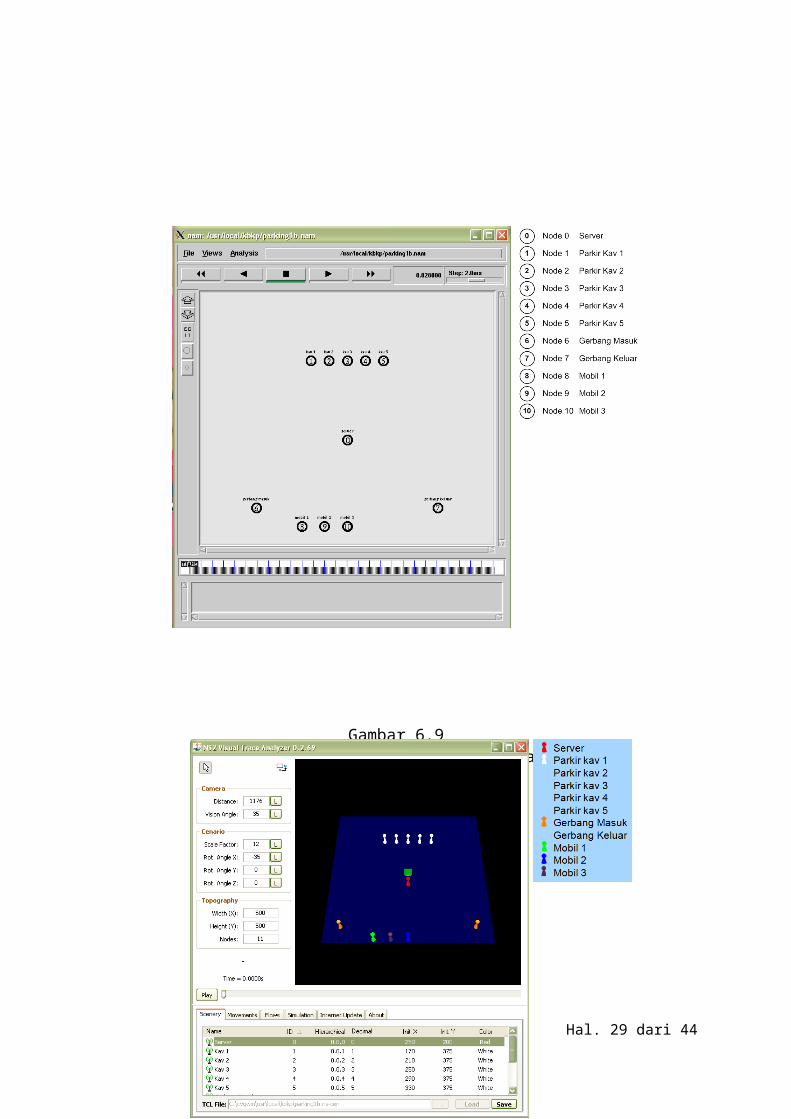
6.6 Tampilan Simulasi
Tampilan hasil simulasi yang dilakukan dengan menggunakan dua perangkat lunak NS2 dan NS2 Visual Trace Analyzer dapat dilihat pada Gambar 6.9 dan Gambar 6.10.
Hal. 21 dari 33
Gambar 6.9Tampilan Hasil Simulasi Menggunakan NS2
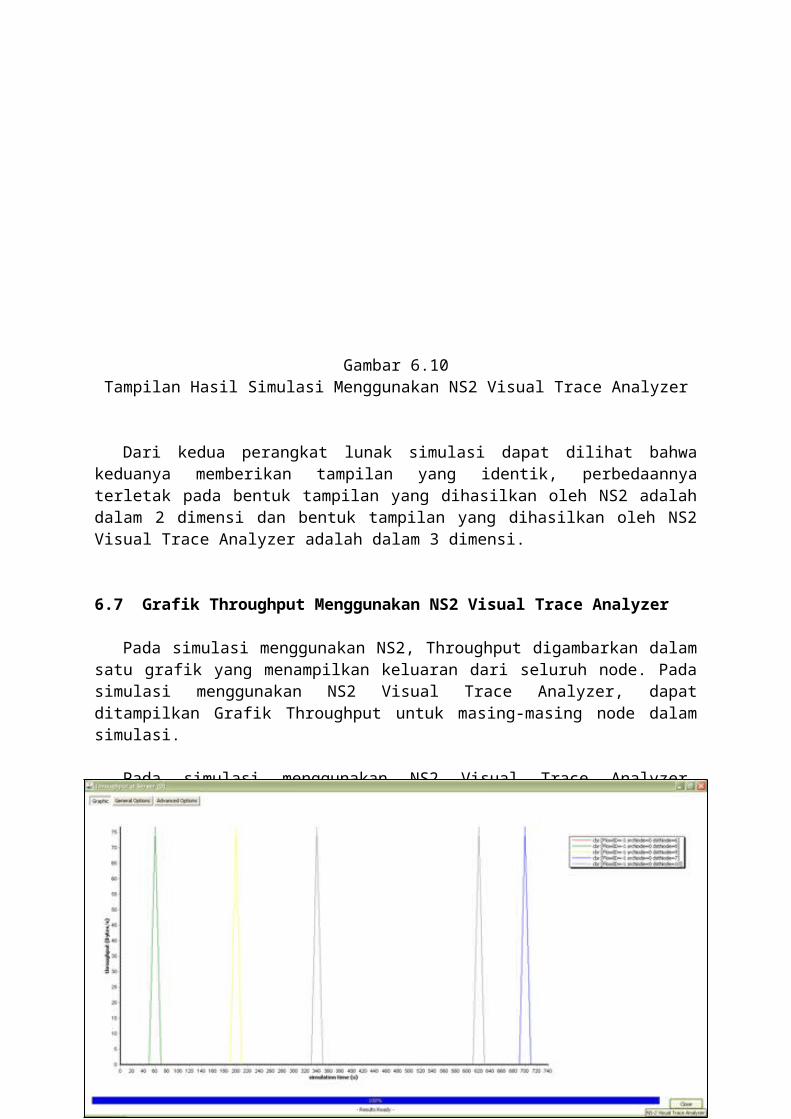
Gambar 6.10Tampilan Hasil Simulasi Menggunakan NS2 Visual Trace Analyzer
Hal. 22 dari 33
Dari kedua perangkat lunak simulasi dapat dilihat bahwa keduanya memberikan tampilan yang identik, perbedaannya terletak pada bentuk tampilan yang dihasilkan oleh NS2 adalah dalam 2 dimensi dan bentuk tampilan yang dihasilkan oleh NS2 Visual Trace Analyzer adalah dalam 3 dimensi.
6.7 Grafik Throughput Menggunakan NS2 Visual Trace Analyzer
Pada simulasi menggunakan NS2, Throughput digambarkan dalam satu grafik yang menampilkan keluaran dari seluruh node. Pada simulasi menggunakan NS2 Visual Trace Analyzer, dapat ditampilkan Grafik Throughput untuk masing-masing node dalam simulasi.
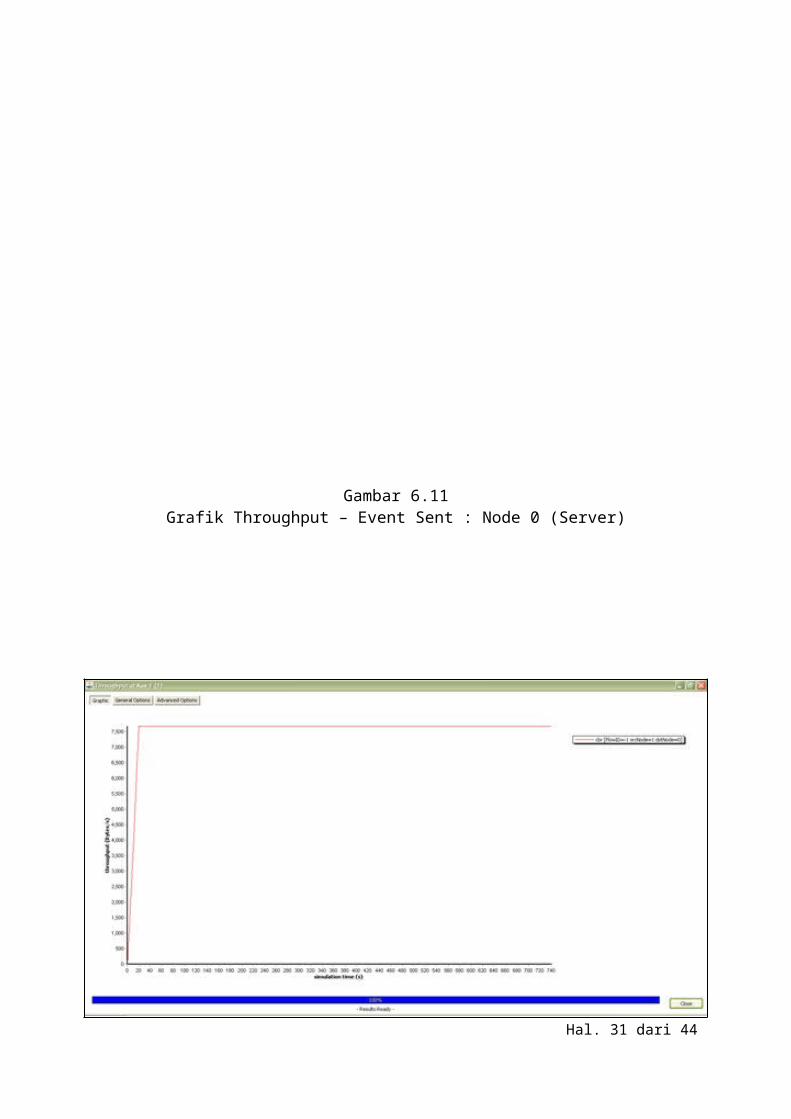
Pada simulasi menggunakan NS2 Visual Trace Analyzer, digunakan parameter simulasi skenario 2 seperti yang telah diuraikan pada bagian 6.4 dan Bandwidth sebesar 2 Mbit.
Grafik Throughput hasil simulasi dengan menggunakan perangkat lunak NS2 Visual Trace Analyzer dapat dilihat pada Gambar 6.11 sampai dengan Gambar 6.24.
Gambar 6.11Grafik Throughput – Event Sent : Node 0 (Server)
Hal. 23 dari 33
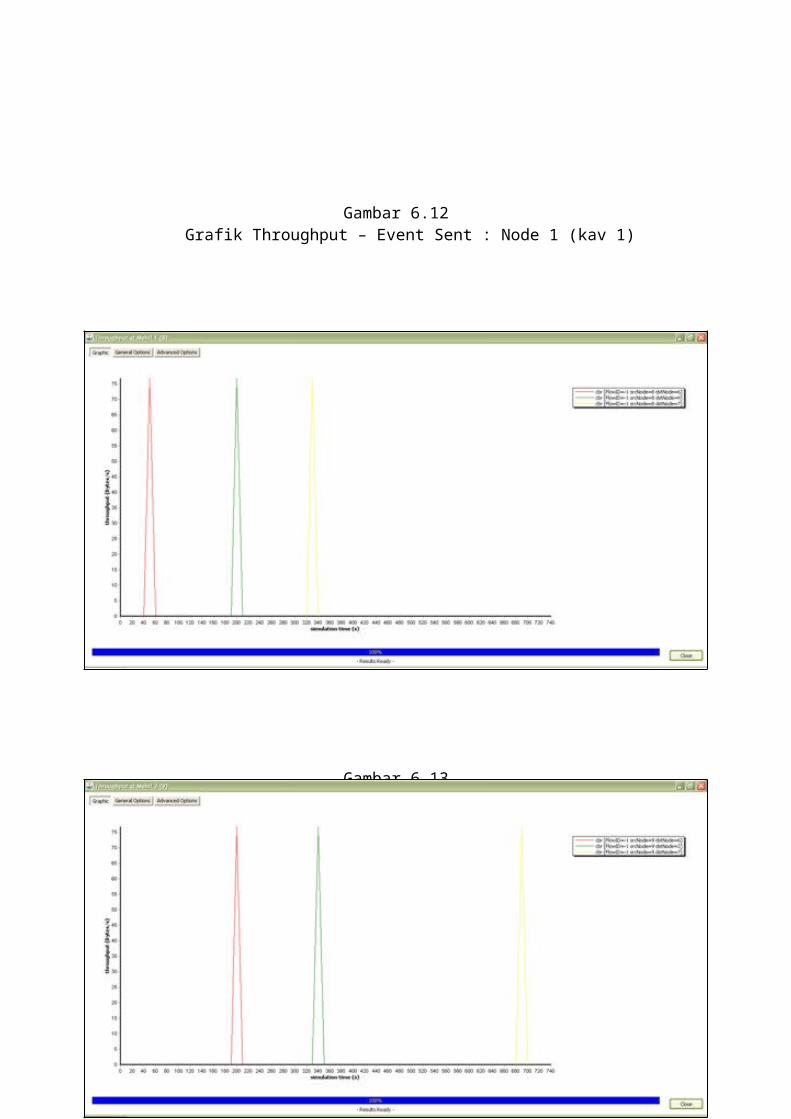
Gambar 6.12Grafik Throughput – Event Sent : Node 1 (kav 1)
Gambar 6.13Grafik Throughput – Event Sent : Node 8 (Mobil 1)
Hal. 24 dari 33
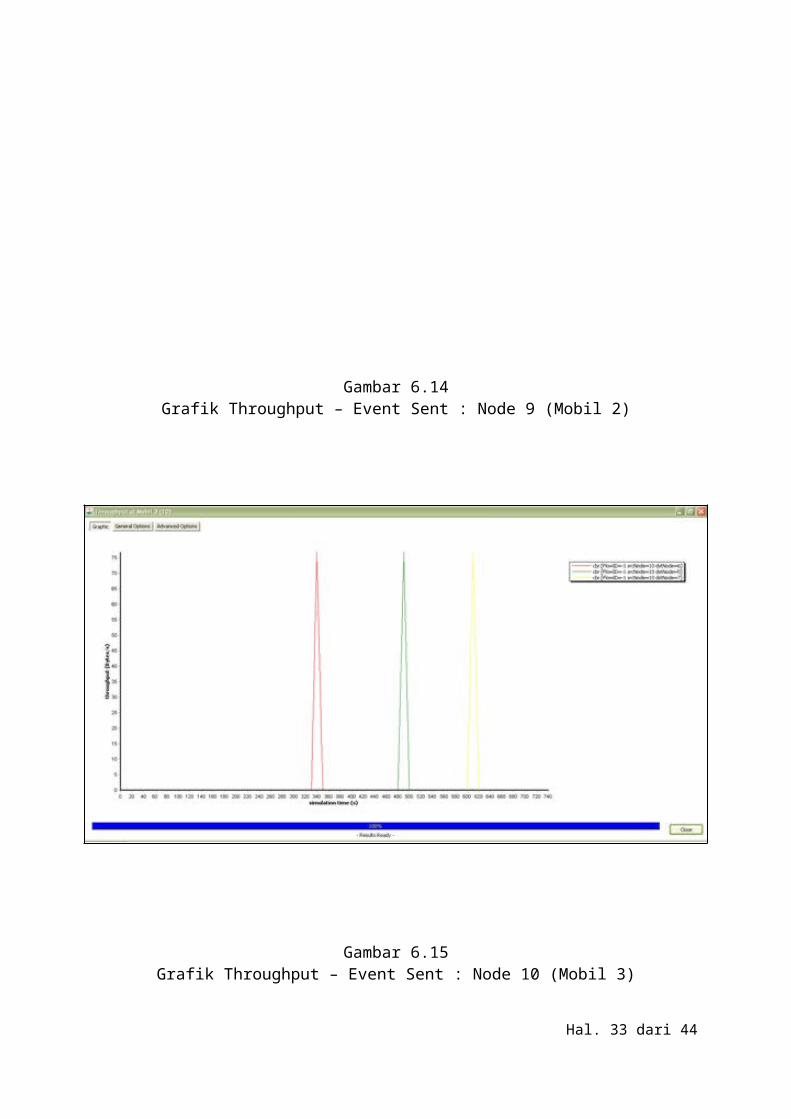
Gambar 6.14Grafik Throughput – Event Sent : Node 9 (Mobil 2)
Gambar 6.15Grafik Throughput – Event Sent : Node 10 (Mobil 3)
Hal. 25 dari 33
Gambar 6.16Grafik Throughput – Event Received : Node 0 (Server)
Gambar 6.17Grafik Throughput – Event Received : Node 2 (kav 2)
Hal. 26 dari 33
Gambar 6.18Grafik Throughput – Event Received : Node 4 (kav 4)
Gambar 6.19Grafik Throughput – Event Received : Node 5 (kav 5)
Hal. 27 dari 33
Gambar 6.20Grafik Throughput – Event Received : Node 6 (gerbang masuk)
Gambar 6.21Grafik Throughput – Event Received : Node 7 (gerbang keluar)
Hal. 28 dari 33
Gambar 6.22Grafik Throughput – Event Received : Node 8 (Mobil 1)
Gambar 6.23Grafik Throughput – Event Received : Node 9 (Mobil 2)
Hal. 29 dari 33
Gambar 6.24Grafik Throughput – Event Received : Node 10 (Mobil 3)
6.8 Perhitungan Kapasistas Sistem
Dalam makalah ini, kapasitas sistem yang dimaksud adalah jumlah lalu lintas paket data yang dapat terjadi dalam waktu yang bersamaan.
Kapasitas Sistem dapat dihitung sebagai berikut (Persamaan 6.1).
Jumlah Paket Data (np) = …………… (Persamaan 6.1)
Dalam perencanaan sistem Smart Parking pada makalah ini digunakan Bandwidth = 2 Mbit dan Packet Size = 768 Bytes. Berdasarkan parameter tersebut maka dapat diperoleh jumlah lalu lintas paket data yang dapat terjadi dari satu node ke node lainnya dalam waktu yang bersamaan adalah sejumlah :
np =
Dalam sistem Smart Parking, server menerima data secara periodik dari kavling parkir dan mengirimkan data ke mobil sesuai dengan kedatangan mobil. Jika dalam suatu area parkir terdapat sejumlah nk kavling parkir dan seluruh kavling mengirimkan data ke server secara bersamaan, maka jumlah Mobil (nm) yang dapat diproses dan ditangani oleh Server dalam waktu yang bersamaan adalah sebagai berikut (Persamaan 6.2).
Hal. 30 dari 33
nm = np - nk …………… (Persamaan 6.2)
Dalam perhitungan kapasitas sistem pada Persamaan 6.1 dan 6.2, terdapat beberapa asumsi yang digunakan yaitu :
faktor spesifikasi teknis dari perangkat penyusun sistem, seperti misalnya spesifikasi dan konfigurasi komputer server, masih diabaikan;
seluruh kavling parkir mengirim data ke server dalam waktu yang bersamaan
Jika jumlah kavling parkir nk lebih besar daripada jumlah paket data np maka dapat dilakukan beberapa langkah perhitungan yaitu pertama membagi kavling parkir nk menjadi sejumlah ng Group/Kelompok kavling parkir nk(Tg) dengan ketentuan jumlah masing-masing kelompok nk(Tg) < np kemudian mengatur pengiriman data dari masing-masing kelompok menjadi beberapa perioda pengiriman Tg dan memberikan selang waktu t antara satu perioda pengiriman dengan pengiriman berikutnya, sehingga diperoleh Persamaan 6.3.
nm(Tg) = np - nk(Tg) …………… (Persamaan 6.3)
dengan g adalah urutan bilangan integer dengan rentang nilai 1 sampai dengan ng
Contoh 6.1Sistem Smart Parking dengan Bw = 2 Mbit dan Packet Size = 768 KBytes akan diterapkan pada suatu area parkir yang memiliki kapasitas 900 mobil.
SolusiBerdasarkan Persamaan 6.1, dengan Bw = 2 Mbit dan Packet Size = 768 KBytes akan diperoleh kapasitas sistem sebesar np = 325 paket data.
Agar sistem dapat menangani lahan parkir dengan kapasitas 900 mobil, langkah pertama yang dilakukan adalah membagi kavling parkir menjadi 3 kelompok ng=3 sehingga akan diperoleh g = {g1,g2,g3} = {1,2,3}, dan dengan syarat nk(Tg) < np dapat dibuat 3 kelompok misalnya nk(T1) = 300, nk(T2)=300, dan nk(T3)=300. Langkah berikutnya adalah mengatur perioda pengiriman data ke server dari masing-masing kelompok dengan memberikan selang waktu misalnya t = 0,1 detik antara pengiriman satu kelompok dengan kelompok berikutnya. Dengan demikian, masing-masing kelompok tidak akan mengirimkan data ke server dalam waktu yang bersamaan sehingga jumlah Mobil nm yang dapat diproses dan ditangani oleh Server untuk setiap perioda adalah :
ng = 3 sehingga diperoleh g = {g1,g2,g3} = {1,2,3} ; t = 0,1
nm(Tg) = np - nk(Tg)
Untuk periode T1 , nm(1) = 325 - nk(1) = 325 – 300 = 25 Mobil
Untuk periode T2 , pengiriman data dilakukan t = 0,1 detik setelah perioda T1
nm(2) = 325 - nk(2) = 325 – 300 = 25 Mobil
Untuk periode T3 , pengiriman data dilakukan t = 0,1 detik setelah perioda T2
Hal. 31 dari 33
nm(3) = 325 - nk(3) = 325 – 300 = 25 Mobil
Perioda pengiriman akan berulang T1, T2, T3,T1, T2, T3, dan seterusnya.Dengan demikian sistem Smart Parking dengan Bw = 2 Mbit dan Packet Size = 768
KBytes akan dapat diterapkan pada suatu area parkir yang memiliki kapasitas 900 mobil.
7. Kesimpulan
Berdasarkan uraian dan analisa pada makalah sistem Smart Parking, dapat diperoleh kesimpulan sebagai berikut.
Sistem Smart Parking dapat menggantikan sistem parkir konvensional saat ini dan dapat memberikan suatu sistem parkir yang lebih efisien.
Sistem Smart Parking telah memenuhi persyaratan sebagai aplikasi komputasi pervasive dengan memenuhi empat persyaratan karakteristik komputasi pervasive.
Pada parameter masukan 512/0.1/K/3000, diperoleh throughput rata-rata adalah 36.3671875 KBps (hasil perhitungan dan p4out0.tr) atau 36.3534 KBps (skrip awk), laju paket yang “jatuh” adalah kira-kira sedikit di atas 60 byte, dan delay semakin panjang ketika semakin banyak node yang mengirimkan data.
Pada parameter masukan 768/0.1/K/500, diperoleh throughput rata-rata adalah 53.8671875 KBps (hasil perhitungan dan p4out0.tr) atau 53.8463 KBps (skrip awk), laju paket yang “jatuh” adalah kira-kira 65 byte, dan delay semakin panjang ketika semakin banyak node yang mengirimkan data.
Semakin besar ukuran paket maka semakin besar throughput rata-rata, semakin besar laju paket yang “jatuh”, dan tidak berbeda pada delay.
Throughput rata-rata dapat diperoleh dengan memasukkan baris skrip tertentu pada file .tcl atau menggunakan awk.
Simulasi dengan menggunakan perangkat lunak NS2 dapat memberikan keluaran grafik throughput dalam bentuk satu grafik menampilkan throughput dari seluruh node.
Simulasi menggunakan perangkat lunak NS2 Visual Trace Analyzer dapat memberikan keluaran grafik throughput dalam bentuk satu grafik menampilkan throughput dari satu node.
Kapasistas Sistem Smart Parking dapat diatur dan disesuaikan dengan daya tampung dari suatu area parkir dengan cara mengatur pola pengiriman data ke server sehingga sistem Smart Parking akan dapat diterapkan tanpa terpengaruh oleh faktor jumlah kavling parkir pada suatu area parkir.
Daftar Pustaka
[1] Emir M. Husni (2007), Pervasive Computing dan Aplikasinya, STEI ITB.
[2] Putu A. Widhiarta (2007), Ubiquitous Computing – Era Ketiga dari Revolusi Komputer, http://www.ilmukomputer.com, September 2008.
[3] Satyanarayanan, M (2001), Pervasive Computing : Vision and Challenges, IEEE Personal Communications, August 2001, 10 - 17.
Hal. 32 dari 33
[4] Iyer, S (2005), RFID : Technology and Applications, http://www.it.iitb.ac.in/~sri/talks/rfid-05.pdf, 14 Agustus 2009, 21.45 WIB.
[5] Ferscha, A et al (2006), Interfaces Everywhere – Interacting with the Pervasive Computer, International ACM Conference on Intelligent User Interfaces (IUI 2006), 29th January – 1st February 2006, Sydney, Australia.
[6] Ke, Chih-Heng, Ph.D. (2009), How to measure the throughput, packet drop rate, and end-to-end delay for UDP-based application over wireless networks ?, http://140.116.72.80/~smallko/ns2/wireless-udp-1.htm
[7] Ke, Chih-Heng, Ph.D. (2006), The received power Pr at a distance d from the transmitter for the two-ray ground reflection model, http://140.116.72.80/~smallko/ns2/11b.htm
[8] Ke, Chih-Heng, Ph.D. (2006), How can you set the communication radius in wireless nodes?, http://140.116.72.80/~smallko/ns2/range.htm
[9] Ke, Chih-Heng, Ph.D. (2005), A simple 802.11b ad-hoc network test, http://140.116.72.80/~smallko/ns2/802_11b_example.htm
[10] Ke, Chih-Heng, Ph.D. (2005), The use of network simulation software to do network performance analysis of the people, http://140.116.72.80/~smallko/ns2/tool.htm
[11] _____ (2005), VIII. Creating Output Files for Xgraph, http://www.isi.edu/nsnam/ns/tutorial/nsscript4.html
[12] _____ (2001), _____, http://www.isi.edu/nsnam/ns/tutorial/examples/example4.tcl
[13] Fall, Kevin (Editor) dan Kannan Varadhan (Editor) (2009), 16.1.6 Trace Support, http://www.isi.edu/nsnam/ns/doc/node184.html
[14] Fall, Kevin (Editor) dan Kannan Varadhan (Editor) (2009), 16.1.7 Revised format for wireless traces, http://www.isi.edu/nsnam/ns/doc/node185.html
[15] Fall, Kevin (Editor) dan Kannan Varadhan (Editor) (2009), 16.1.7.1 Explanation of new trace format, http://www.isi.edu/nsnam/ns/doc/node186.html
Hal. 33 dari 33