makalah rotary encoder
DESCRIPTION
rotary encoderTRANSCRIPT
BAB I
PENDAHULUAN
A. LATAR BELAKANG
Pada era globalisasi saat ini, telah banyak alat-alat canggih yang telah tercipta salah
satunya sensor dan tranduser yang digunakan oleh manusia untuk membantunya dalam
kehidupan sehari-hari. Rotary encoder merupakan sensor yang banyak digunakan oleh
peralatan perindustrian, perkantoran bahkan dalam kehidupan sehari – hari.
Sensor ini mendeteksi piringan yang berputar dengan kecepatan tertentu lalu
dilakukan proses pembaacaan kode yang ada pada permukaan piringan tersebut. Karena
mendeteksi perputaran, hal tersebut juga dimanfaatkan oleh banyak alat untuk melakukan
suatu pengukuran terutama dalam pengukuran kecepatan dan penentu posisi serta arah.
Diharapkan dengan makalah presentasi tetang sensor rotary encoder ini kita bisa mengerti apa
itu sensor rotary encoder, bagaimana cara kerjanya dll.
B. TUJUAN
Adapun tujuan dari makalah yang membahas dari sensor rotary encoder ini yaitu :
1. Untuk mengetahui pengertian rotary encoder.
2. Untuk memahami prinsip kerja rotary encoder baik secara teori maupun secara
matematis.
3. Untuk mengetahui aplikasi rotary encoder dalam kehidupan sehari-hari.
C. BATASAN MASALAH
Berdasarkan uraian dari latarbelakang diatas, penulis akan membatasi masalah yang
akan dibahas pada makalah ini. Adapun masalah yang akan di bahas adalah :
1. Pengertian rotary encoder
2. Prinsip kerja rotary encoder baik secara teori maupun secara matematis.
3. Aplikasi dari rotary encoder.
Page1
BAB II
TEORI DASAR
Sensor adalah suatu alat untuk mendeteksi sutau besaran fisis, temperature,
gaya,tekanan, aliran fluida level fluida, kelembaban, dan lain - lain.
Sensor merupakan perluasan / peningkatan kemampuan untuk memperoleh informasi tentang
kuantitas fisik yang tidak bisa diperoleh oleh indra manusia karena keterbatasan dan
kekurang telitian yang dimiliki manusia.
Sedangkan transduser adalah suatu alat untuk mentransformasikan suatu besaran fisik
ke besaran fisik lainnya atau dari energi satu ke energi lainnya yang bersesuaian
Input-transduser (phisical/elekctrical signal) dan output transduser (electrical signal/display
atau actuator.
Kehadiran besar sistem digital untuk pemrosesan informasi dan tampilan dalam
sistem pengukuran dan kontrol membuat sensor digital sangat menarik. Karena output
mereka secara langsung dalam bentuk digital, mereka hanya memerlukan sangat sinyal
pengkondisian sederhana dan sering kurang rentan terhadap elektromagnetik interferensi dari
sensor analog. Kelompok ini mencakup encoders posisi.
Rotary encoder adalah divais elektromekanik yang dapat memonitor gerakan dan
posisi. Rotary encoder umumnya menggunakan sensor optik untuk menghasilkan serial pulsa
yang dapat diartikan menjadi gerakan, posisi, dan arah. Sehingga posisi sudut suatu poros
benda berputar dapat diolah menjadi informasi berupa kode digital oleh rotary encoder untuk
diteruskan oleh rangkaian kendali. Rotary encoder umumnya digunakan pada pengendalian
robot, motor drive, dsb.
Rotary encoder tersusun dari suatu piringan tipis yang memiliki lubang-lubang pada
bagian lingkaran piringan. LED ditempatkan pada salah satu sisi piringan sehingga cahaya
akan menuju ke piringan. Di sisi yang lain suatu photo-transistor diletakkan sehingga photo-
transistor ini dapat mendeteksi cahaya dari LED yang berseberangan. Piringan tipis tadi
dikopel dengan poros motor, atau divais berputar lainnya yang ingin kita ketahui posisinya,
sehingga ketika motor berputar piringan juga akan ikut berputar.
Apabila posisi piringan mengakibatkan cahaya dari LED dapat mencapai photo-
transistor melalui lubang-lubang yang ada, maka photo-transistor akan mengalami saturasi
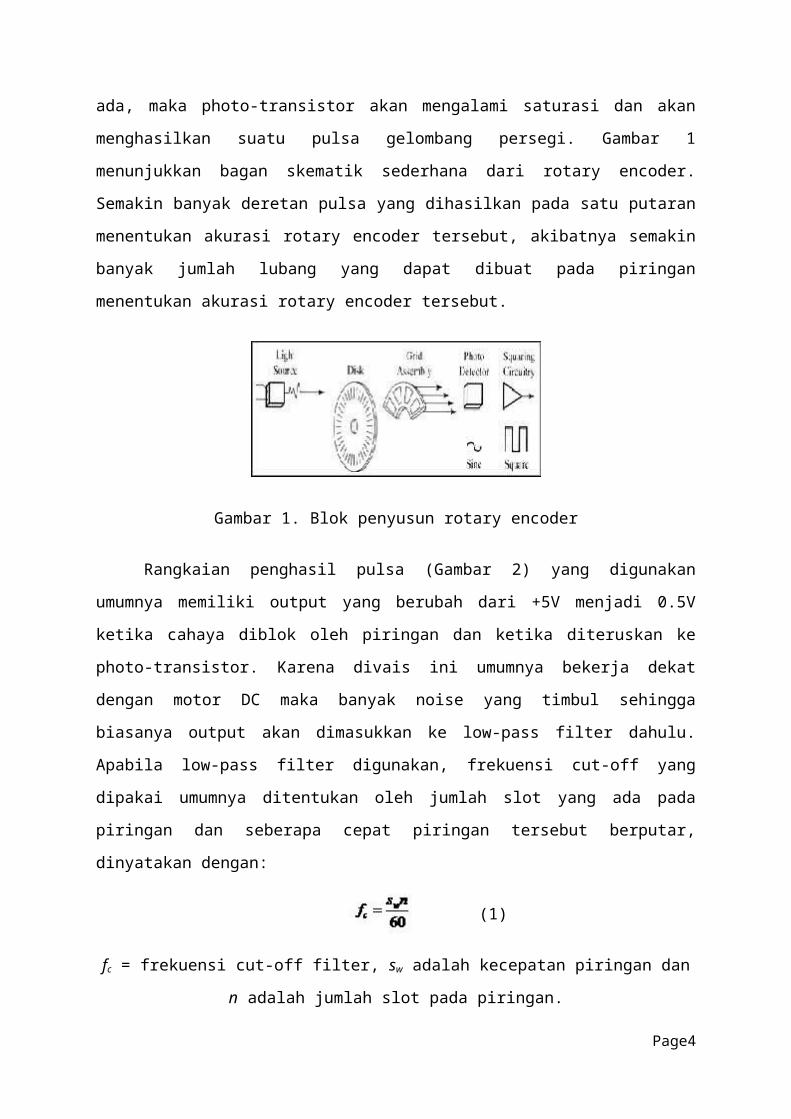
dan akan menghasilkan suatu pulsa gelombang persegi. Gambar 1 menunjukkan bagan
skematik sederhana dari rotary encoder. Semakin banyak deretan pulsa yang dihasilkan pada
Page2
satu putaran menentukan akurasi rotary encoder tersebut, akibatnya semakin banyak jumlah
lubang yang dapat dibuat pada piringan menentukan akurasi rotary encoder tersebut.
Gambar 1. Blok penyusun rotary encoder
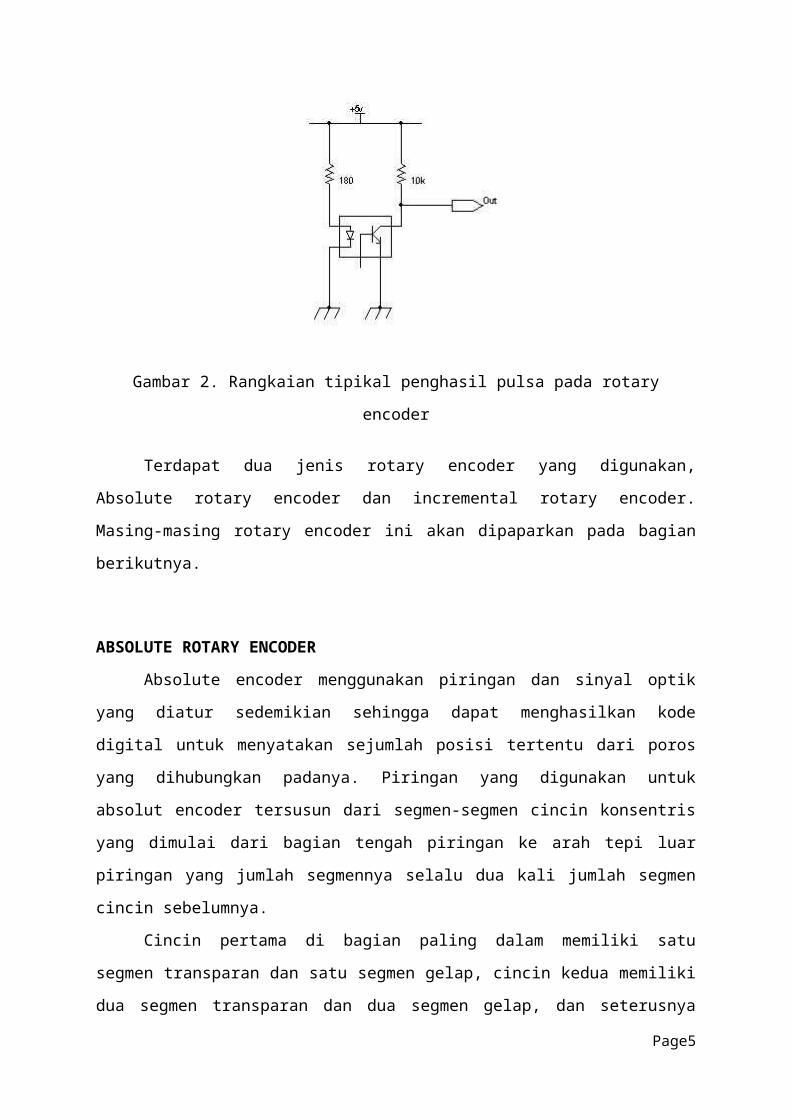
Rangkaian penghasil pulsa (Gambar 2) yang digunakan umumnya memiliki output
yang berubah dari +5V menjadi 0.5V ketika cahaya diblok oleh piringan dan ketika
diteruskan ke photo-transistor. Karena divais ini umumnya bekerja dekat dengan motor DC
maka banyak noise yang timbul sehingga biasanya output akan dimasukkan ke low-pass filter
dahulu. Apabila low-pass filter digunakan, frekuensi cut-off yang dipakai umumnya
ditentukan oleh jumlah slot yang ada pada piringan dan seberapa cepat piringan tersebut
berputar, dinyatakan dengan:
(1)
fc = frekuensi cut-off filter, sw adalah kecepatan piringan dan n adalah jumlah slot pada
piringan.
Gambar 2. Rangkaian tipikal penghasil pulsa pada rotary encoder
Page3
Terdapat dua jenis rotary encoder yang digunakan, Absolute rotary encoder dan
incremental rotary encoder. Masing-masing rotary encoder ini akan dipaparkan pada bagian
berikutnya.
ABSOLUTE ROTARY ENCODER
Absolute encoder menggunakan piringan dan sinyal optik yang diatur sedemikian
sehingga dapat menghasilkan kode digital untuk menyatakan sejumlah posisi tertentu dari
poros yang dihubungkan padanya. Piringan yang digunakan untuk absolut encoder tersusun
dari segmen-segmen cincin konsentris yang dimulai dari bagian tengah piringan ke arah tepi
luar piringan yang jumlah segmennya selalu dua kali jumlah segmen cincin sebelumnya.
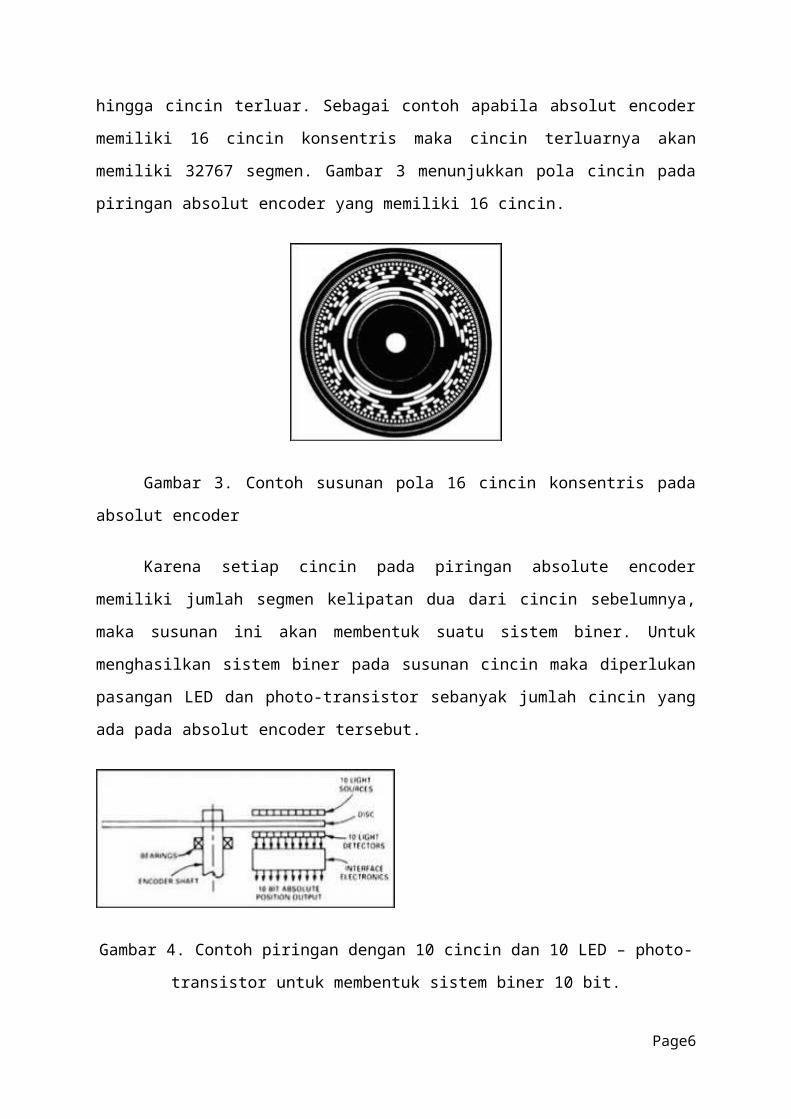
Cincin pertama di bagian paling dalam memiliki satu segmen transparan dan satu
segmen gelap, cincin kedua memiliki dua segmen transparan dan dua segmen gelap, dan
seterusnya hingga cincin terluar. Sebagai contoh apabila absolut encoder memiliki 16 cincin
konsentris maka cincin terluarnya akan memiliki 32767 segmen. Gambar 3 menunjukkan
pola cincin pada piringan absolut encoder yang memiliki 16 cincin.
Gambar 3. Contoh susunan pola 16 cincin konsentris pada absolut encoder
Karena setiap cincin pada piringan absolute encoder memiliki jumlah segmen
kelipatan dua dari cincin sebelumnya, maka susunan ini akan membentuk suatu sistem biner.
Untuk menghasilkan sistem biner pada susunan cincin maka diperlukan pasangan LED dan
photo-transistor sebanyak jumlah cincin yang ada pada absolut encoder tersebut.
Page4
Gambar 4. Contoh piringan dengan 10 cincin dan 10 LED – photo-transistor untuk
membentuk sistem biner 10 bit.
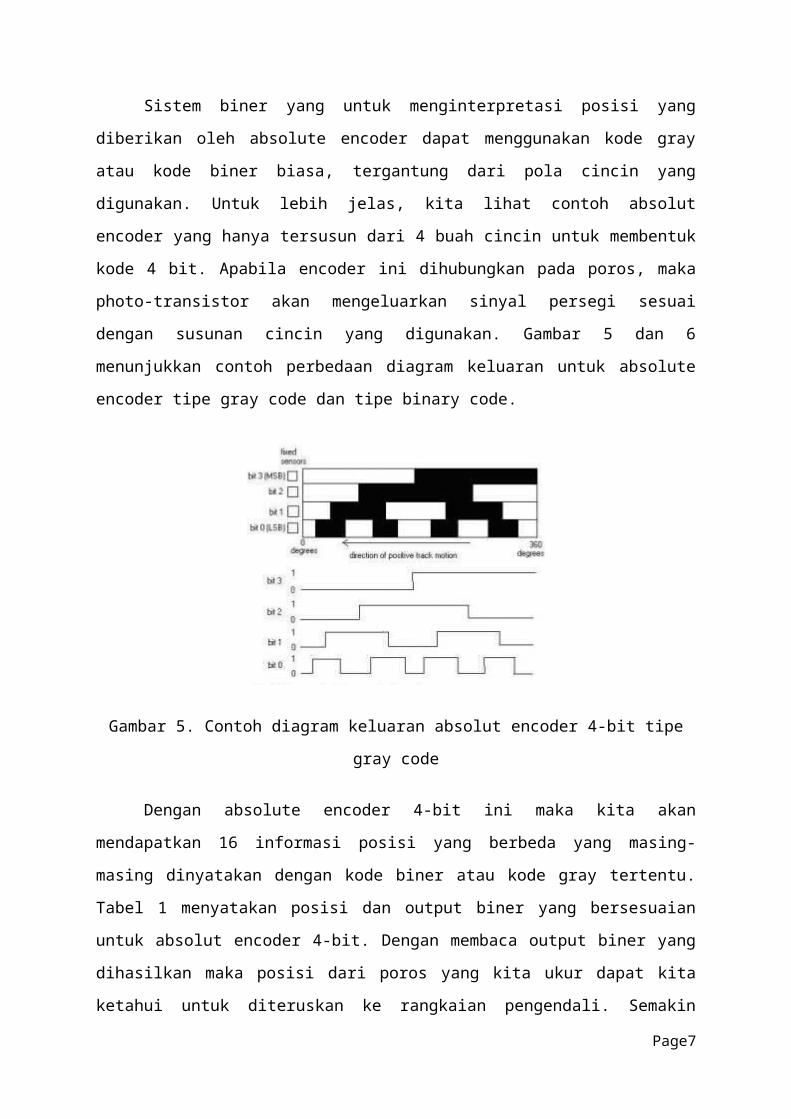
Sistem biner yang untuk menginterpretasi posisi yang diberikan oleh absolute encoder
dapat menggunakan kode gray atau kode biner biasa, tergantung dari pola cincin yang
digunakan. Untuk lebih jelas, kita lihat contoh absolut encoder yang hanya tersusun dari 4
buah cincin untuk membentuk kode 4 bit. Apabila encoder ini dihubungkan pada poros, maka
photo-transistor akan mengeluarkan sinyal persegi sesuai dengan susunan cincin yang
digunakan. Gambar 5 dan 6 menunjukkan contoh perbedaan diagram keluaran untuk absolute
encoder tipe gray code dan tipe binary code.
Gambar 5. Contoh diagram keluaran absolut encoder 4-bit tipe gray code
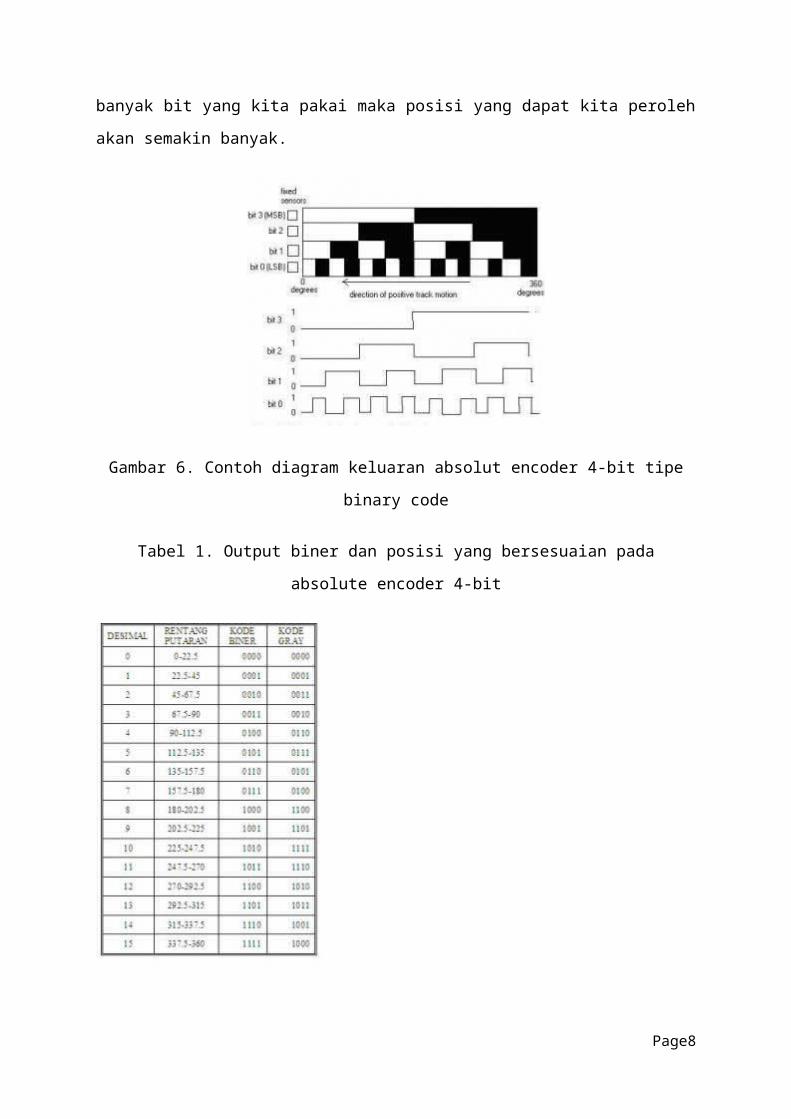
Dengan absolute encoder 4-bit ini maka kita akan mendapatkan 16 informasi posisi
yang berbeda yang masing-masing dinyatakan dengan kode biner atau kode gray tertentu.
Tabel 1 menyatakan posisi dan output biner yang bersesuaian untuk absolut encoder 4-bit.
Dengan membaca output biner yang dihasilkan maka posisi dari poros yang kita ukur dapat
kita ketahui untuk diteruskan ke rangkaian pengendali. Semakin banyak bit yang kita pakai
maka posisi yang dapat kita peroleh akan semakin banyak.
Page5
Gambar 6. Contoh diagram keluaran absolut encoder 4-bit tipe binary code
Tabel 1. Output biner dan posisi yang bersesuaian pada absolute encoder 4-bit
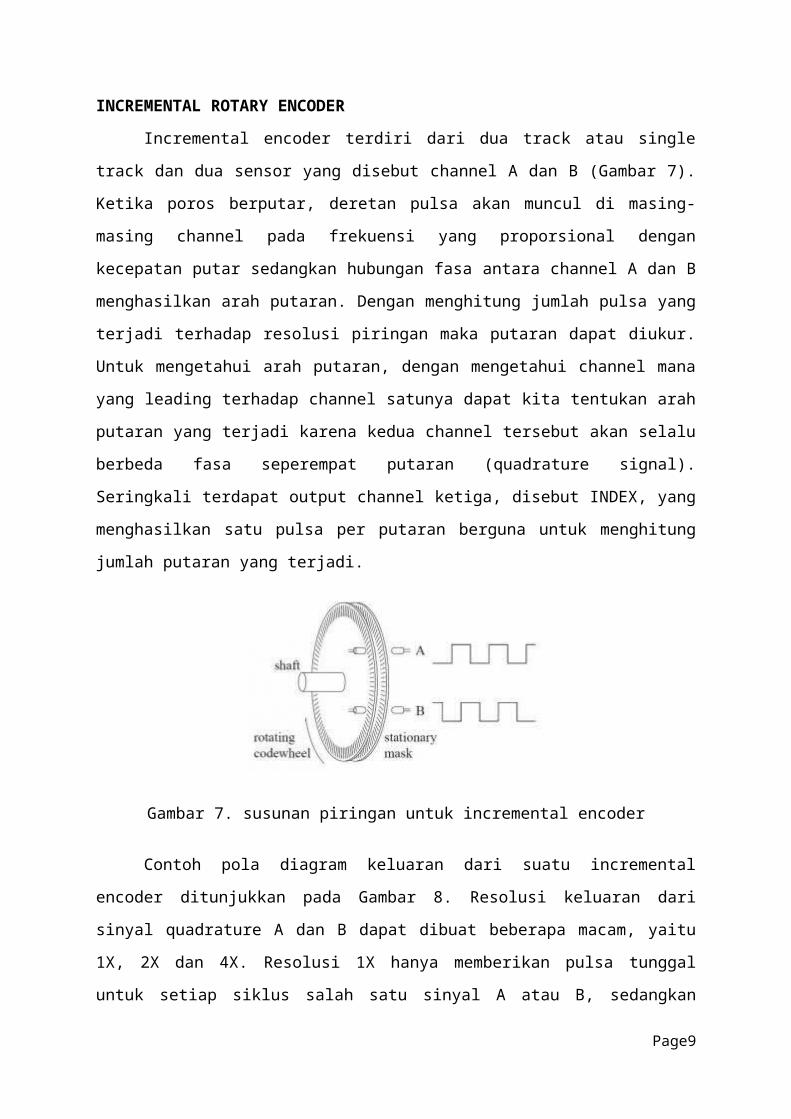
INCREMENTAL ROTARY ENCODER
Incremental encoder terdiri dari dua track atau single track dan dua sensor yang
disebut channel A dan B (Gambar 7). Ketika poros berputar, deretan pulsa akan muncul di
masing-masing channel pada frekuensi yang proporsional dengan kecepatan putar sedangkan
hubungan fasa antara channel A dan B menghasilkan arah putaran. Dengan menghitung
jumlah pulsa yang terjadi terhadap resolusi piringan maka putaran dapat diukur. Untuk
Page6
mengetahui arah putaran, dengan mengetahui channel mana yang leading terhadap channel
satunya dapat kita tentukan arah putaran yang terjadi karena kedua channel tersebut akan
selalu berbeda fasa seperempat putaran (quadrature signal). Seringkali terdapat output
channel ketiga, disebut INDEX, yang menghasilkan satu pulsa per putaran berguna untuk
menghitung jumlah putaran yang terjadi.
Gambar 7. susunan piringan untuk incremental encoder
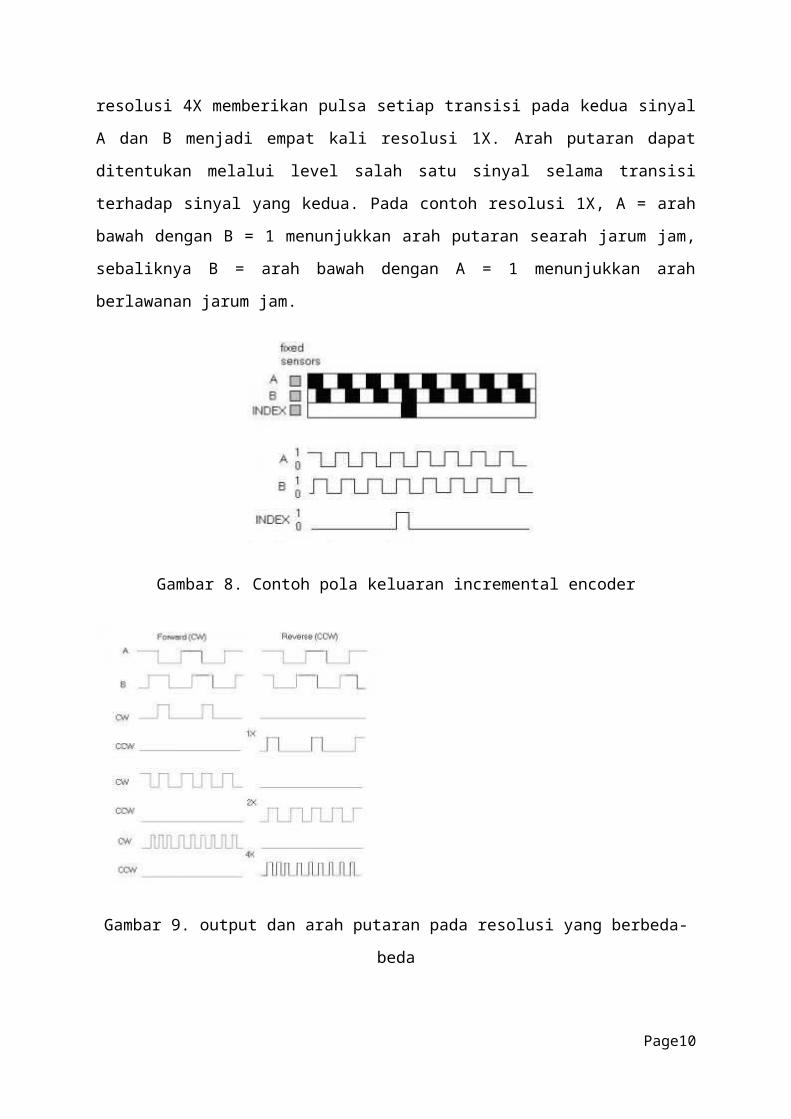
Contoh pola diagram keluaran dari suatu incremental encoder ditunjukkan pada
Gambar 8. Resolusi keluaran dari sinyal quadrature A dan B dapat dibuat beberapa macam,
yaitu 1X, 2X dan 4X. Resolusi 1X hanya memberikan pulsa tunggal untuk setiap siklus salah
satu sinyal A atau B, sedangkan resolusi 4X memberikan pulsa setiap transisi pada kedua
sinyal A dan B menjadi empat kali resolusi 1X. Arah putaran dapat ditentukan melalui level
salah satu sinyal selama transisi terhadap sinyal yang kedua. Pada contoh resolusi 1X, A =
arah bawah dengan B = 1 menunjukkan arah putaran searah jarum jam, sebaliknya B = arah
bawah dengan A = 1 menunjukkan arah berlawanan jarum jam.
Gambar 8. Contoh pola keluaran incremental encoder
Page7
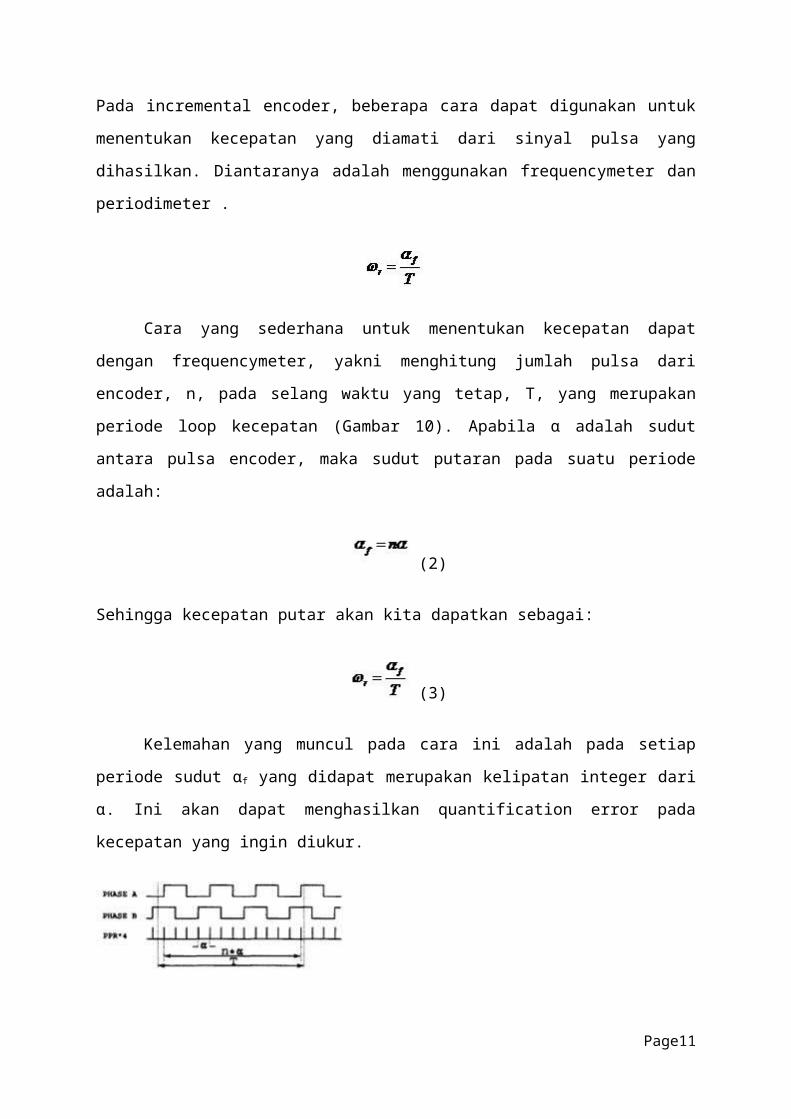
Gambar 9. output dan arah putaran pada resolusi yang berbeda-beda
Pada incremental encoder, beberapa cara dapat digunakan untuk menentukan kecepatan yang
diamati dari sinyal pulsa yang dihasilkan. Diantaranya adalah menggunakan frequencymeter
dan periodimeter .
Cara yang sederhana untuk menentukan kecepatan dapat dengan frequencymeter,
yakni menghitung jumlah pulsa dari encoder, n, pada selang waktu yang tetap, T, yang
merupakan periode loop kecepatan (Gambar 10). Apabila α adalah sudut antara pulsa
encoder, maka sudut putaran pada suatu periode adalah:
(2)
Sehingga kecepatan putar akan kita dapatkan sebagai:
(3)
Kelemahan yang muncul pada cara ini adalah pada setiap periode sudut αf yang
didapat merupakan kelipatan integer dari α. Ini akan dapat menghasilkan quantification error
pada kecepatan yang ingin diukur.
Page8
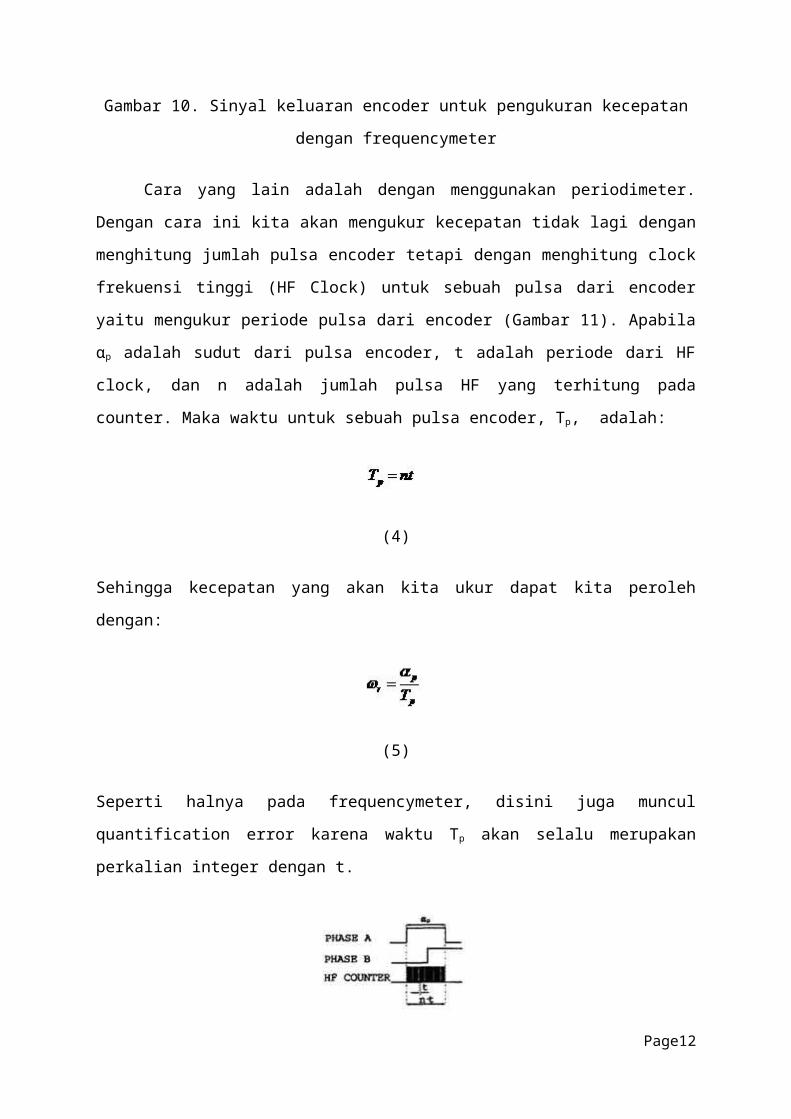
Gambar 10. Sinyal keluaran encoder untuk pengukuran kecepatan dengan frequencymeter
Cara yang lain adalah dengan menggunakan periodimeter. Dengan cara ini kita akan
mengukur kecepatan tidak lagi dengan menghitung jumlah pulsa encoder tetapi dengan
menghitung clock frekuensi tinggi (HF Clock) untuk sebuah pulsa dari encoder yaitu
mengukur periode pulsa dari encoder (Gambar 11). Apabila αp adalah sudut dari pulsa
encoder, t adalah periode dari HF clock, dan n adalah jumlah pulsa HF yang terhitung pada
counter. Maka waktu untuk sebuah pulsa encoder, Tp, adalah:
(4)
Sehingga kecepatan yang akan kita ukur dapat kita peroleh dengan:
(5)
Seperti halnya pada frequencymeter, disini juga muncul quantification error karena waktu Tp
akan selalu merupakan perkalian integer dengan t.
Gambar 11. Pengukuran kecepatan dengan menggunakan Periodimeter
Page9
BAB III
APLIKASI
A. CD-ROM
Cara Kerja CD-Rom
CD-ROM adalah sebuah piringan kompak dari jenis piringan optik (optical disc) yang
dapat menyimpan data. Ukuran data yang dapat disimpan saat ini bisa mencapai 700MB atau
700 juta bita.
Mulai tahun 1983 sistem penyimpanan data di optical disc mulai diperkenalkan
dengan diluncurkannya Digital Audio Compact Disc. Sejak saat itulah teknologi
penyimpanan pada optical disc berkembang.
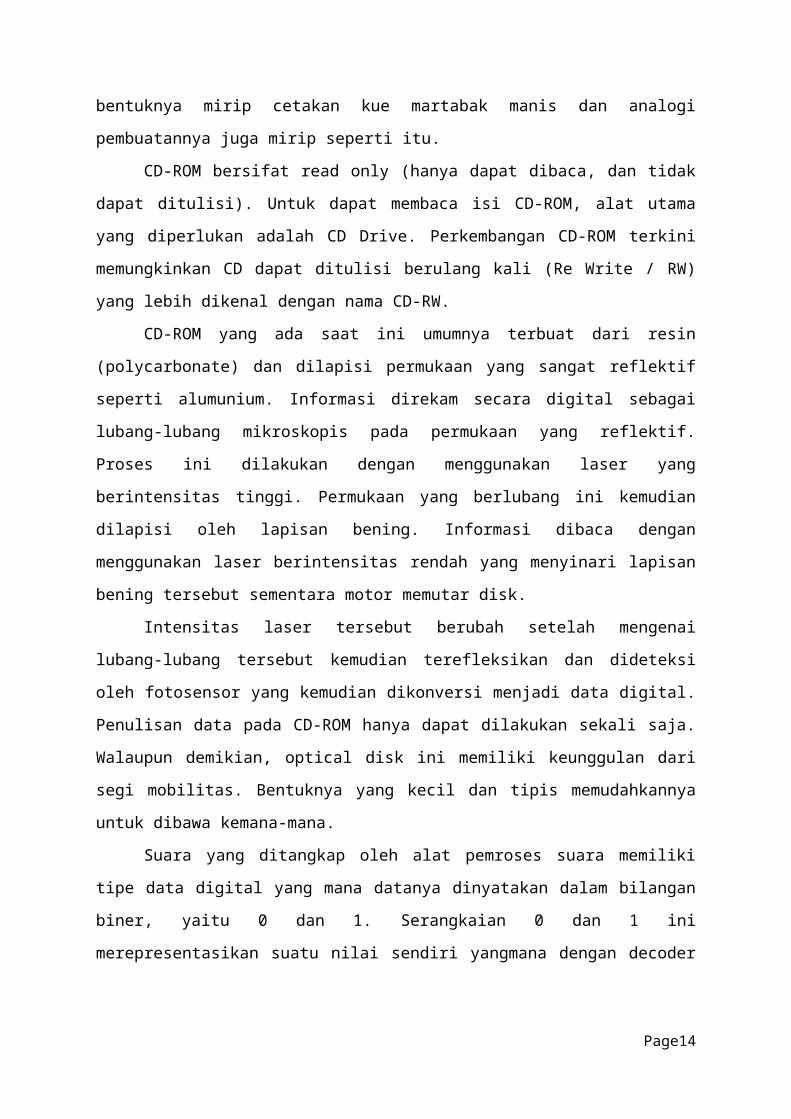
Biasanya piringan CD-ROM berwarna perak. Proses pembuatannya adalah dengan
cara menaruh selembar lapisan plastik yang telah disinari oleh sinar laser. Sinar laser itu akan
membentuk semacam pit (lubang) berukuran mikro, yang sangat kecil sekali. Lubang-lubang
itu akan membentuk deretan kode yang isinya berupa data. Sekali tercipta lubang, maka tidak
bisa ditutup lagi. Lalu lapisan plastik itu akan dibungkus lagi oleh plastik cair yang berguna
sebagai pelindung dan pemantul. Semua itu prosesnya dilakukan secara bertahap dalam suatu
mesin cetakan. Alat cetakan CD-ROM bentuknya mirip cetakan kue martabak manis dan
analogi pembuatannya juga mirip seperti itu.
CD-ROM bersifat read only (hanya dapat dibaca, dan tidak dapat ditulisi). Untuk
dapat membaca isi CD-ROM, alat utama yang diperlukan adalah CD Drive. Perkembangan
CD-ROM terkini memungkinkan CD dapat ditulisi berulang kali (Re Write / RW) yang lebih
dikenal dengan nama CD-RW.
CD-ROM yang ada saat ini umumnya terbuat dari resin (polycarbonate) dan dilapisi
permukaan yang sangat reflektif seperti alumunium. Informasi direkam secara digital sebagai
lubang-lubang mikroskopis pada permukaan yang reflektif. Proses ini dilakukan dengan
menggunakan laser yang berintensitas tinggi. Permukaan yang berlubang ini kemudian
dilapisi oleh lapisan bening. Informasi dibaca dengan menggunakan laser berintensitas
rendah yang menyinari lapisan bening tersebut sementara motor memutar disk.
Intensitas laser tersebut berubah setelah mengenai lubang-lubang tersebut kemudian
terefleksikan dan dideteksi oleh fotosensor yang kemudian dikonversi menjadi data digital.
Penulisan data pada CD-ROM hanya dapat dilakukan sekali saja. Walaupun demikian,
Page10
optical disk ini memiliki keunggulan dari segi mobilitas. Bentuknya yang kecil dan tipis
memudahkannya untuk dibawa kemana-mana.
Suara yang ditangkap oleh alat pemroses suara memiliki tipe data digital yang mana
datanya dinyatakan dalam bilangan biner, yaitu 0 dan 1. Serangkaian 0 dan 1 ini
merepresentasikan suatu nilai sendiri yangmana dengan decoder tertentu akan menghasilkan
nilai yang diinginkan (data yang diperoleh tidak rusak/sesuai).
Pada kepingan CD, data 0 diperoleh dari lubang yang dibuat oleh CD writer,
sedangkan data 1 tidak memiliki lubang. Jadi, deretan data seperti 1011, dalam bentuk fisik
akan menjadi: rata-lubang-rata-rata. Lubang ini dimensinya sangat kecil sekali.
Konstruksi CD dengan lubang ini bukanlah apa yang terjadi pada jaman sekarang.
Namun, dasarnya sama. Sekarang, lobang atau ratanya diganti dengan transparan atau
buramnya salah satu lapisan pada CD yang namanya Photosensitive Dye. Lapisan ini yang
menentukan pola deretan data 1 dan 0.
Mengapa disebut CD burner? Karena itulah yang dikerjakannya, membakar lapisan
Photosensitive Dye ini sehingga menjadi lebih buram alias tidak transparan. Apa yang terjadi
apabila dia transparan? Bila transparan, maka dengan CD reader, akan terbaca sebagai 1,
sedangkan bila buram akan terbaca 0.
Cara kerja CD reader adalah dengan melihat apakah cahaya laser yang
ditembakkannya ke keping CD dipantulkan kembali ke sensor (pada CD reader) atau tidak.
Apabila dipantulkan (berarti lapisan Photosensitive Dye-nya transparan alias tidak terbakar)
berarti data ini adalah 1, apabila tidak ada pantulannya atau lemah pantulannya maka data ini
adalah0.
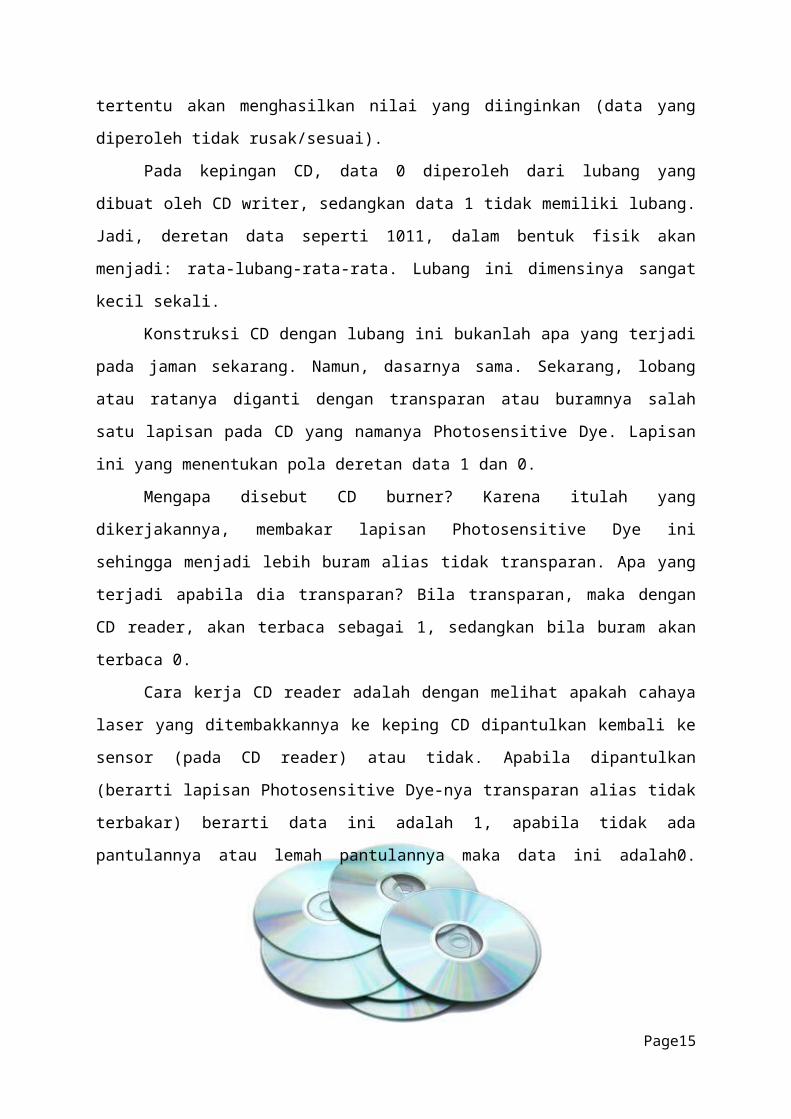
CD Kosong(belum terbakar)
Page11
CD yang telah terbakar(terisi data)
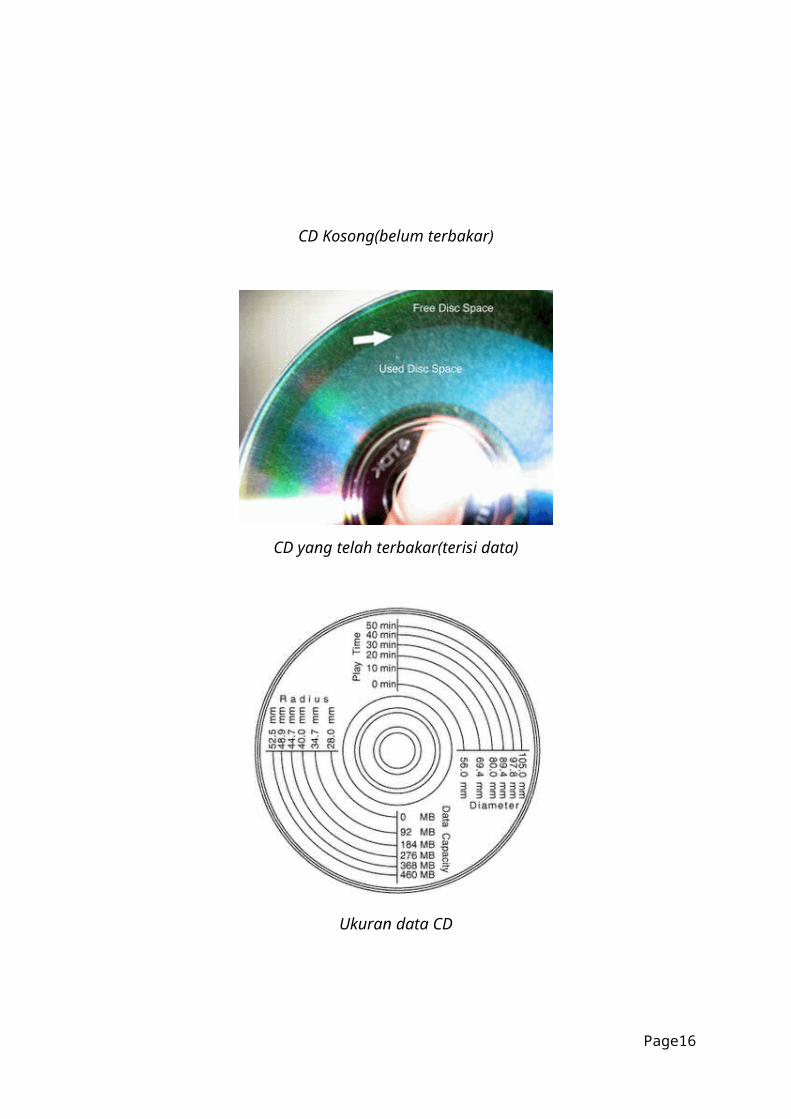
Ukuran data CD
CD memiliki permukaan yang berlubang.
Page12
B. PENGUKUR KECEPATAN ANGIN
Mekanik pengukur kecepatan angin ini berupa balingbaling mangkok yang dibuat sedemikian rupa hingga setiap. kecepatan angin sebesar 0,1 km/jam diwakili oleh 1 pulsa detaksetiap detik. Suatu benda yang bergerak dengan kecepatan 3 km/jam dalam satu detik akan menempuh jarak sejauh 83,3 cm. Dasarperhitungannya adalah sebagai berikut:v = 3 km/jam= 83,3 cm/sBaling-baling mangkok mempunyai bentuk lintasan yang melingkar, karena itu sejauh 83,3 cm merupakan panjang keliling lingkaran dari baling-baling mangkok. Keliling lingkaran baling-baling mangkok 83,3 cm mempunyai jari-jari lingkaran baling-baling mangkok 13.26 cm. Mangkok penangkap angin yang digunakan pada tugas akhir ini mempunyai diameter 6,6 cm, karena itulah jari-jari baling-baling mangkok diperpanjang empat kali menjadi 13,2 cm mengakibatkan keliling lingkaran baling-balig mangkok menjadi 82,9 cm. Bentuk dari baling-baling mangkok diperlihatkan pada Gambar 3.2.
Gambar 3.2 Mekanik baling-baling dan piringan sensor
Keliling lingkaran sepanjang 82,9 cm dapat ditempuh dalam satu detik dengan kecepatan mendekati 3 km/jam. Alat ukur ini dirancang agar kecepatan 0,1 km/jam setiap detiknyadiwakili oleh satu pulsa, dengan demikian kecepatan 3 km/jam diwakili oleh 30 pulsa tiap detik. Ini berarti bahwa tiap satu putaran baling-baling mangkok dikopel dengan piringan sensor yang dapat menghasilkan 30 pulsa tiap detiknya. Piringan sensor adalah alat yang digunakan untuk mengindera kecepatan putar baling-baling mangkok. Titik pusat piringan sensor dan titik pusat baling-baling mangkok dihubungkan dengan sebuah poros, sehingga kecepatan putar piringan sensor sama dengan kecepatan putar baling-balingmangkok. Bentuk dari piringan sensor yang dikopel dengan baling-baling diperlihatkan pada Gambar 3.2 diatas.
Page13
C. PENENTU ARAH ANGINArah angin dinyatakan dengan arah dari mana datangnya angin, misalnya: angin barat
yang artinya angin datang dari barat, angin tenggara yang artinya angin datang dari tenggara, dan sebagainya. Mekanik penentu arah angin ini berupa sirip untuk menunjukan arah angin seperti yang terlihat pada Gambar 3.5 Sirip ini berfungsi untuk memutar sensor rotary encoder untuk menunjukan arah angin sesuai dengan arahdatangnya angin.
Gambar 3.5 Mekanik penunjuk arah angin
Seperti terlihat pada Gambar 3.5, mekanik arah angin mempunyai poros vertikal A. Ekor angin C mempunyai daya tangkap angin yang lebih besar dari ujung mekanik B. Dengan demikian, maka dari manapun angin datang bertiup, ujung mekanik B senantiasa mengambil kedudukan menuju ke arahdari mana datangnya angin.
Page14
BAB IV
KESIMPULAN
Rotary encoder adalah divais elektromekanik yang dapat memonitor gerakan
dan posisi. Rotary encoder umumnya menggunakan sensor optik untuk
menghasilkan serial pulsa yang dapat diartikan menjadi gerakan, posisi, dan
arah. Sehingga posisi sudut suatu poros benda berputar dapat diolah menjadi
informasi berupa kode digital oleh rotary encoder untuk diteruskan oleh
rangkaian kendali.
Terdapat dua jenis rotary encoder yang digunakan, Absolute rotary encoder
dan incremental rotary encoder.
Absolute encoder menggunakan piringan dan sinyal optik yang diatur
sedemikian sehingga dapat menghasilkan kode digital untuk menyatakan
sejumlah posisi tertentu dari poros yang dihubungkan padanya. Piringan yang
digunakan untuk absolut encoder tersusun dari segmen-segmen cincin
konsentris yang dimulai dari bagian tengah piringan ke arah tepi luar piringan
yang jumlah segmennya selalu dua kali jumlah segmen cincin sebelumnya.
Incremental encoder terdiri dari dua track atau single track dan dua sensor
yang disebut channel A dan B. Ketika poros berputar, deretan pulsa akan
muncul di masing-masing channel pada frekuensi yang proporsional dengan
kecepatan putar sedangkan hubungan fasa antara channel A dan B
menghasilkan arah putaran. Dengan menghitung jumlah pulsa yang terjadi
terhadap resolusi piringan maka putaran dapat diukur.
Rotray encoder dapat digunakan dalam beberapa aplikasi seperti pengukur
kecepatan angin, penentu arah angin, CD-ROM, dll.
Page15
DAFTAR PUSTAKA
http://sribcd.com/
http://id.wikipedia.org/
http://belajarelektronika.blogspot.com/
http://www.beisensors.com/encoder-sensor-product-overview.html
Page16