line follower paper
DESCRIPTION
ini merupakan paper line follower robotTRANSCRIPT
Semi Paper ILTC 2016
Nama Tim : DewatabotKategori : Ketua Tim : Asal Sekolah :
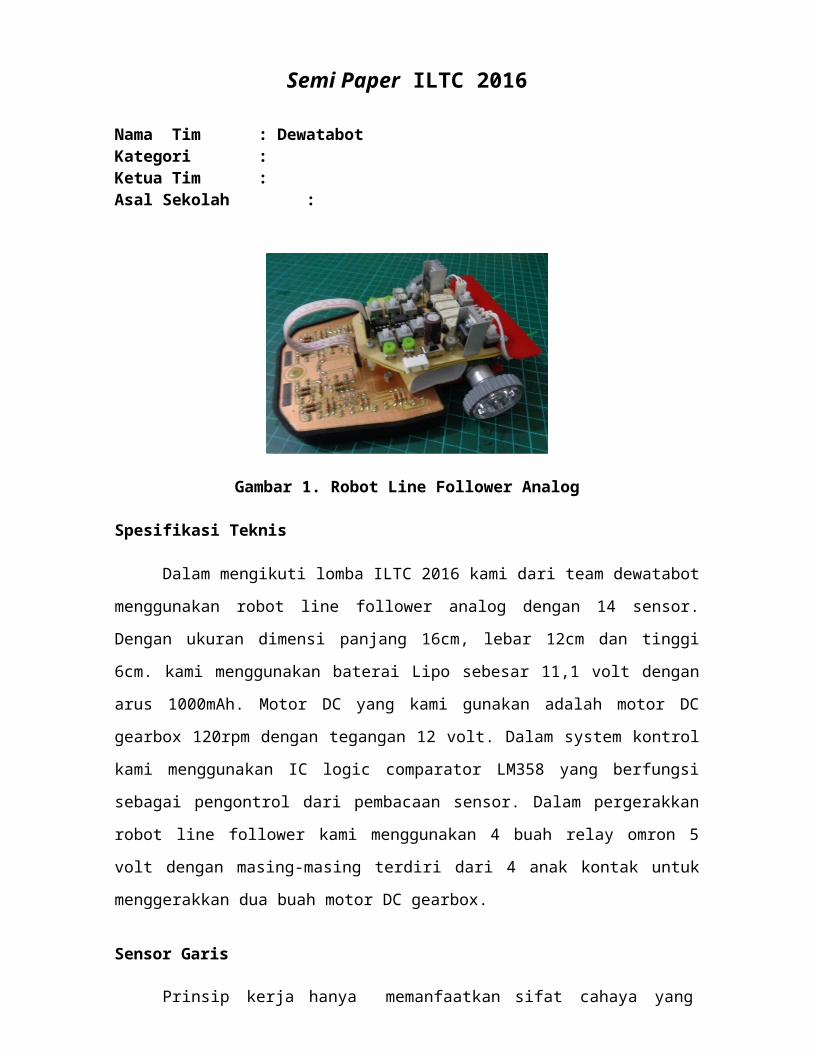
Gambar 1. Robot Line Follower Analog
Spesifikasi Teknis
Dalam mengikuti lomba ILTC 2016 kami dari team dewatabot menggunakan robot
line follower analog dengan 14 sensor. Dengan ukuran dimensi panjang 16cm, lebar 12cm
dan tinggi 6cm. kami menggunakan baterai Lipo sebesar 11,1 volt dengan arus 1000mAh.
Motor DC yang kami gunakan adalah motor DC gearbox 120rpm dengan tegangan 12 volt.
Dalam system kontrol kami menggunakan IC logic comparator LM358 yang berfungsi
sebagai pengontrol dari pembacaan sensor. Dalam pergerakkan robot line follower kami
menggunakan 4 buah relay omron 5 volt dengan masing-masing terdiri dari 4 anak kontak
untuk menggerakkan dua buah motor DC gearbox.
Sensor Garis
Prinsip kerja hanya memanfaatkan sifat cahaya yang akan dipantulkan jika
mengenai benda berwarna terang dan akan diserap jika mengenai benda berwarna
gelap. Sebagai sumber cahaya kita gunakan LED (Light Emiting Diode) yang akan
memancarkan cahaya merah. Dan untuk menangkap pantulan cahaya LED, kita
gunakan photodiode. Jika sensor berada diatas garis hitam maka photodioda akan
menerima sedikit sekali cahaya pantulan. Tetapi jika sensor berada diatas garis
putih maka photodioda akan menerima banyak cahaya pantulan. Berikut adalah
ilustrasinya :

312
312
312
312
312
312
+
LED Photodioda LED Photodioda
Garis Hitam
Gambar 1. Cahaya pantulan sedikit
Garis Putih
Gambar 2. Cahaya pantulan banyak
Sifat dari photodioda adalah jika semakin banyak cahaya yang diterima, maka
nilai resistansi diodanya semakin kecil. Dengan melakukan sedikit modifikasi, maka
besaran resistansi tersebut dapat diubah menjadi tegangan. Sehingga jika sensor
berada diatas garis hitam, maka tegangan keluaran sensor akan kecil, demikian pula
sebaliknya. Berikut adalah gambar rangkaian sensor proximity yang digunakan pada
robot ini :+5V +5V
+5V +5V +5V VR110K
+5VR3470 +5V +5V +5V VR1
10K
+5VR3470
R1220
R210K
U1A LM339
D3LED R1
220R210K
U1D LM339
D3LED
7 + 1 Ke AVR (PD.0 )6 -
1113
10 -Ke AVR (PD.3)
D1 D2LED PD
+5V
D1 D2LED PD
+5V
+5V +5V +5V VR210K
+5VR6470 +5V +5V +5V VR2
10K
+5VR6470
R4220
R510K
U1B LM339
D6LED R4
220R510K
U2A LM339
D6LED
5 + 2
Ke AVR (PD.1 )4 -
7 + 1
Ke AVR (PD.4)6 -
D4 D5LED PD
+5V
D4 D5LED PD
+5V
+5V +5V +5V VR210K
+5VR6470 +5V +5V +5V VR2
10K
+5VR6470
R4220
R510K
U1C LM339
D6LED R4
220R510K
U2B LM339
D6LED
9 +14
8 -Ke AVR (PD.2 )
5 + 2
Ke AVR (PD.5)4 -
D4 D5LED PD
D4 D5LED PD
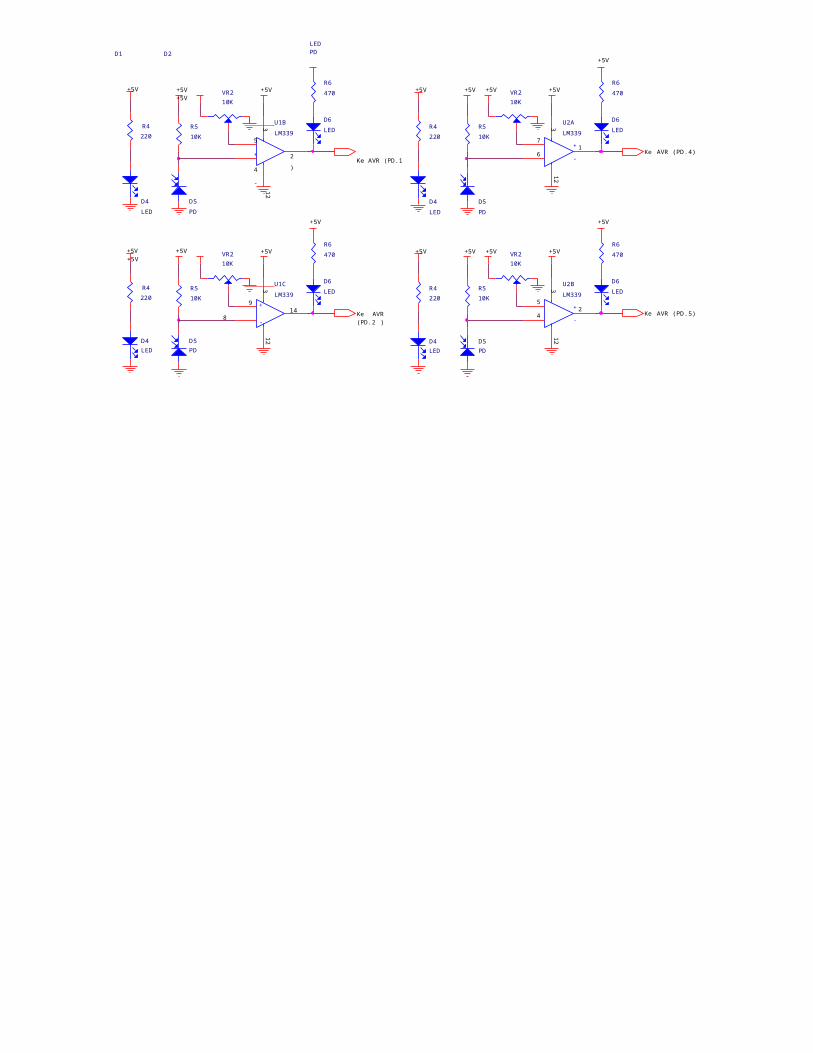
Jumlah sensor yang kami gunakan adalah 14 sensor garis dengan masing masing
sensor memiliki pemancar dan penerima yang masuk ke bagian system kontrol
dari robot line follower. Berikut ini merupakan bentuk fisik dari sensor garis
yang team kami gunakan.
Gambar 4. Bagian Sensor Garis
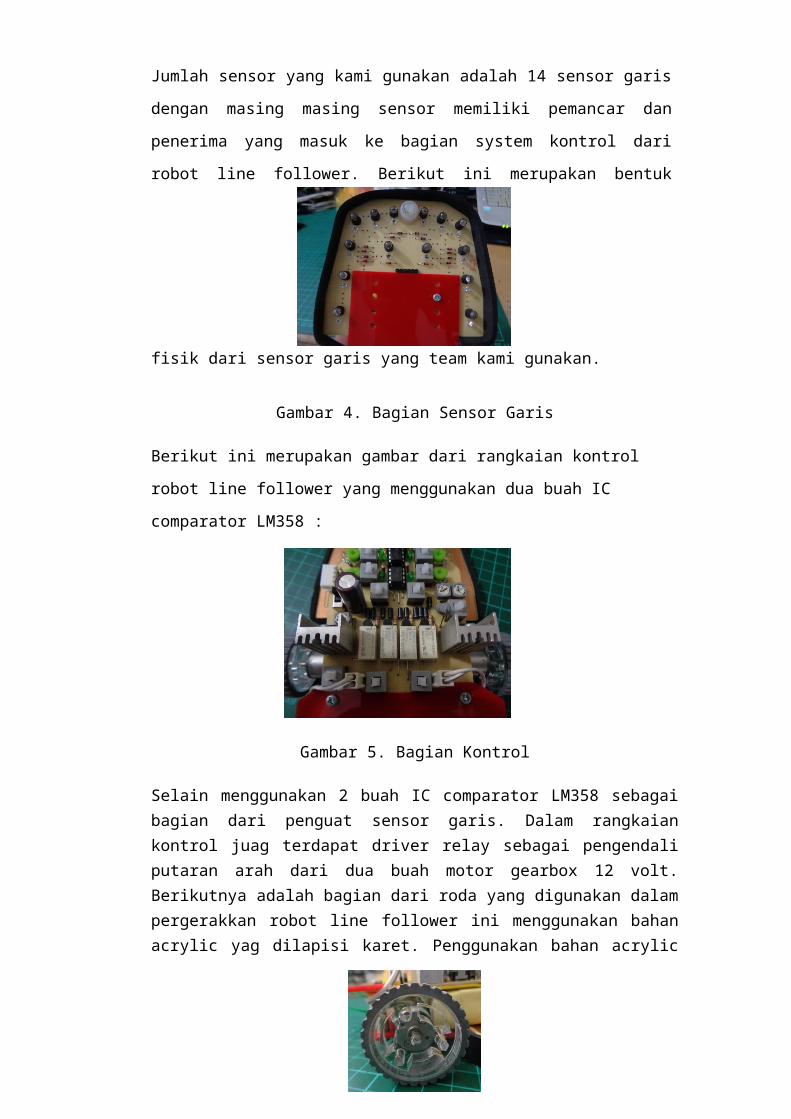
Berikut ini merupakan gambar dari rangkaian kontrol robot line follower yang
menggunakan dua buah IC comparator LM358 :
Gambar 5. Bagian Kontrol
Selain menggunakan 2 buah IC comparator LM358 sebagai bagian dari penguat sensor garis. Dalam rangkaian kontrol juag terdapat driver relay sebagai pengendali putaran arah dari dua buah motor gearbox 12 volt. Berikutnya adalah bagian dari roda yang digunakan dalam pergerakkan robot line follower ini menggunakan bahan acrylic yag dilapisi karet. Penggunakan bahan acrylic agar robot dapat memiliki kekuatan dan kecepatan dalam bergerak karena bahan acrylic ini cukup ringan. Berikut ini merupakan gambar dari roda robot yang kami gunakan.
Gambar 6. Roda Robot
3
4