iii. teori dasar 3.1. hukum newton - digilib.unila.ac.iddigilib.unila.ac.id/11388/18/bab iii...
TRANSCRIPT

18
III. TEORI DASAR
3.1. Hukum Newton
Dasar dari metode gayaberat adalah hukum Newton tentang gayaberat dan teori
medan potensial. Newton menyatakan bahwa besar gaya tarik menarik antara dua
buah partikel yang mempunyai massa m1 dan m2 dengan jarak antara kedua titik
pusat partikel tersebut r adalah (Grant, 1965):
2
21
r
mmGF (1)
dimana :
F = Gaya antara benda m1 dan m2
G = konstanta gayaberat = (6,672 x 10-11
m3/kg s
2)
r = jarak antara m1 dan m2
m1 F12 F21 m2
r
Gambar 6. Gaya tarik menarik antara dua benda m1 dan m2
Gaya persatuan massa dari m1 terhadap suatu partikel yang mempunyai jarak r
dari m1 disebut medan gayaberat dari partikel m1 yang besarnya:
rr
mGrE ˆ)(
2
1
(2)

19
Dalam kenyataannya bentuk bumi tidak bulat sempurna, tetapi berbentuk elipsoid
(agak pepat pada kutubnya). Dengan demikian variasi gayaberat di setiap titik
permukaan bumi dipengaruhi oleh 4 faktor yaitu:
1 Lintang
2 Topografi
3 Pasangsurut
4 Variasi rapatmassa bawah permukaan
3.2. Potensial Gayaberat
Suatu massa yang terdapat dalam sistem ruang tertentu akan menimbulkan medan
potensial (skalar) disekitarnya. Medan potensial untuk gayaberat (gaya akibat
tarik-menarik suatu massa) bersifat konservatif, artinya usaha yang dilakukan
dalam suatu medan gayaberat tidak tergantung pada lintasan yang ditempuhnya,
tetapi tergantung pada posisi awal dan akhir dan memenuhi persamaan berikut :
0g dan g U (3)
Dimana :
U = potensial skalar
g = gayaberat (vektor)
Gaya yang timbul dapat diturunkan dari suatu fungsi potensial skalar
U(x,y,z) berikut :
zyxgm
zyxFrU ,,
,,,,
(4)
Persamaan (3.4) dapat ditulis dalam koordinat bola menjadi :
,,,,
,, rgm
rFrU
(5)
Dari persamaan (3.5) dapat diperoleh bentuk persamaan potensial gayaberat :
rdgrdUrU
rr
,, (6)

20
Dengan mensubstitusikan 2
mg
r
, maka Persamaan (6) dalam bentuk skalar
menjadi :
r
mdr
rmrU
r
2
1)( (7)
3.3. Pengukuran Gayaberat
1. Pengukuran absolut
Pengukuran absolut dilakukan di laboratorium-laboratorium, sukar untuk
mendapatkan harga gayaberat absolut yang akurat, karena banyak kendala yang
sangat mempengaruhi hasil pengukuran (Sarkowi, 2009). Oleh karena itu,
pengukuran secara absolut jarang sekali dilakukan karena terlalu sukar dan
melibatkan banyak faktor maupun alat. Cara pengukuran absolut yaitu pendulum,
jatuh bebas, dan gravimeter.
2. Pengukuran relatif
Pengukuran relatif lebih umum dan mudah dilakukan, pada penelitian gayaberat.
Pengukuran relatif dilakukan dengan membandingkan hasil pengukuran titik yang
tidak diketahui nilai gayaberatnya dengan titik yang sudah diketahui yang telah
diikat kepada titik-titik referensinya, misal Pastdam, IGSN, dan lainnya.
Gayaberat diukur berdasarkan adanya perbedaan sifat fisik massa yang berada
diantara dua benda yang terpisah oleh jarak r. Dengan adanya rapat-massa yang
berbeda menyebabkan harga gayaberat yang berbeda pada permukaan bumi.
21
Harga gayaberat rata-rata pada permukaan bumi dalam satuan SI adalah 9,8 m/s2.
Satuan yang lebih kecil dinyatakan dalam µm/s2 atau g.u (gravity unit). Dalam
satuan cgs, harga gayaberat dinyatakan dalam cm/s2 atau gal.
3. Alat-alat pengukur percepatan gayaberat
a. Pendulum
√
= √
(8)
Ketelitian alat Pendulum maksimum 0.1 mGal.
b. Pengukuran gayaberat dengan benda jatuh
Dari persamaan benda jatuh bebas didapatkan persamaan berikut:
H = Vot + 1/2gt2
(9)
Dengan Vo = 0, maka:
g = 2h/t2 (10)
Ketelitian pengukuran gayaberat dengan benda jatuh ditentukan oleh h dan t
dan ketelitian mencapai 10-7
Gal.
c. Pengukuran relatif menggunakan gravimeter
Gravimeter adalah alat pengukur gayaberat relatif yang prinsip kerjanya
didasarkan atas memanjangnya pegas akibat perbedaan gaya tarik yang
berlaku pada beban, bila sebuah gravimeter dibawa ke dua tempat yang
berbeda harga gayaberatnya, perbedaan tersebut dibaca pada mistar skala.
Ada dua macam alat gravimeter yaitu tipe stabil dan anstabil. Tipe yang
anstabil saat ini lebih banyak digunakan karena tinggi harga ketelitian dan
22
akurasinya, contoh dari tipe ini adalah Worden, Scintrex Autograv dan
Lacoste Romberg Gravimeter.
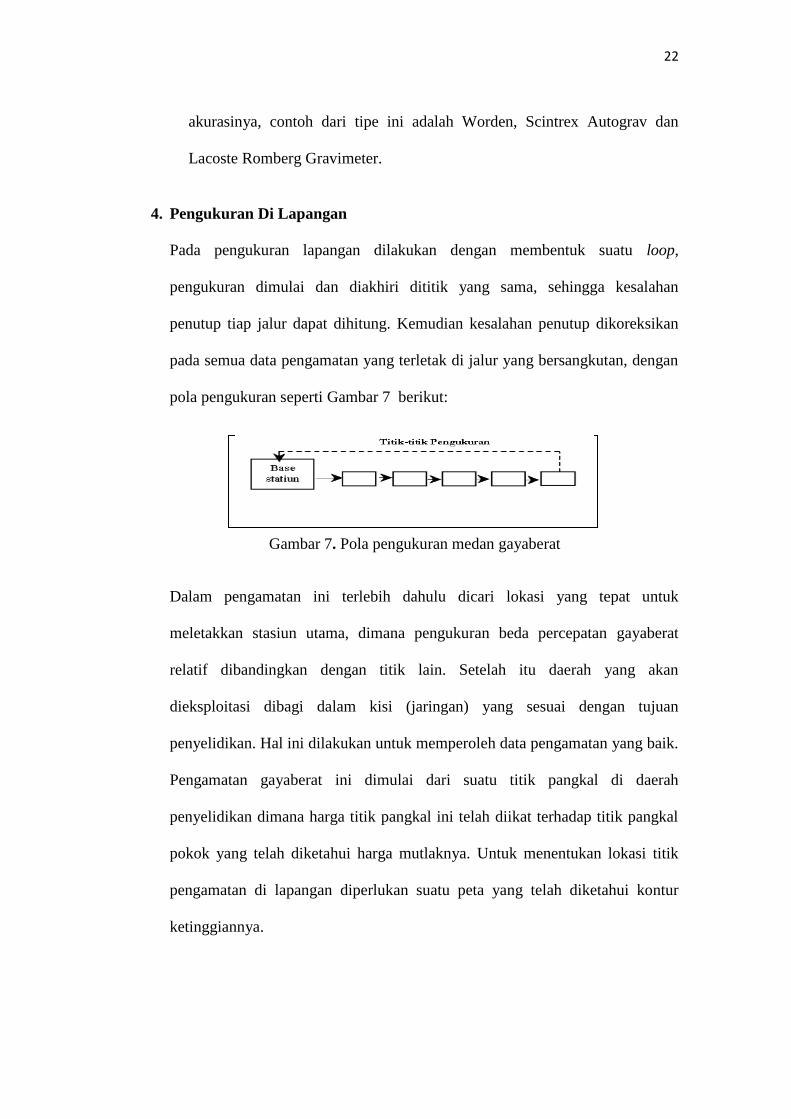
4. Pengukuran Di Lapangan
Pada pengukuran lapangan dilakukan dengan membentuk suatu loop,
pengukuran dimulai dan diakhiri dititik yang sama, sehingga kesalahan
penutup tiap jalur dapat dihitung. Kemudian kesalahan penutup dikoreksikan
pada semua data pengamatan yang terletak di jalur yang bersangkutan, dengan
pola pengukuran seperti Gambar 7 berikut:
Gambar 7. Pola pengukuran medan gayaberat
Dalam pengamatan ini terlebih dahulu dicari lokasi yang tepat untuk
meletakkan stasiun utama, dimana pengukuran beda percepatan gayaberat
relatif dibandingkan dengan titik lain. Setelah itu daerah yang akan
dieksploitasi dibagi dalam kisi (jaringan) yang sesuai dengan tujuan
penyelidikan. Hal ini dilakukan untuk memperoleh data pengamatan yang baik.
Pengamatan gayaberat ini dimulai dari suatu titik pangkal di daerah
penyelidikan dimana harga titik pangkal ini telah diikat terhadap titik pangkal
pokok yang telah diketahui harga mutlaknya. Untuk menentukan lokasi titik
pengamatan di lapangan diperlukan suatu peta yang telah diketahui kontur
ketinggiannya.

23
Kecermatan perhitungan nilai anomali Bouguer dalam setiap penelitian sangat
ditentukan oleh kecermatan data pengukuran topografi setiap stasiun, yang
terdiri dari data lintang geografi sampai ketinggian 0.01 detik dan data elevasi
sampai ketelitian 0.5 meter. Untuk mendapatkan harga pembacaan dalam
gayaberat (milligal) dari pembacaan di lapangan, maka harga bacaan tersebut
harus dikonversikan kedalam satuan milligal dengan cara tertentu sesuai
dengan manual alat tersebut.
3.4. Koreksi Data Gayaberat
Harga gayaberat observasi hasil survey gayaberat akan berbeda antara satu tempat
dengan tempat yang lainnya. Perbedaan tersebut disebabkan antara lain:
1. Pemempatan (flattening) dan rotasi bumi.
2. Perbedaan jarak dari pusat bumi.
3. Perbedaan ketinggian maupun kedalaman di setiap titik pengukuran terhadap
bidang datum (mean sea level).
4. Adanya efek tarikan dari massa yang berada diantara bidang datum dan stasiun
pengukuran.
5. Adanya suatu efek topografi permukaan yang relatif kasar dengan perbedaan
elevasi yang besar.
Untuk menghilangkan perbedaan hasil pembacaan harga g, maka harus dilakukan
koreksi terhadap gayaberat. Koreksi-koreksi dalam penelitian sebagai berikut
.
24
1. Koreksi tidal (pasang surut)
Percepatan gayaberat di permukaan bumi di samping dipengaruhi oleh adanya
gaya tarik bumi juga dipengaruhi oleh gaya tarik matahari dan bulan, sehingga
untuk mendapatkan percepatan gayaberat yang akurat harus memperhitungkan
pengaruh dari gaya tarik bulan dan matahari yang sering disebut dengan
koreksi pasang surut.
Besarnya koreksi pasang surut dapat di ukur langsung dengan menggunakan
Gravimeter secara periodik maupun hitungan dengan menggunakan komputer
berdasarkan perumusan Longman (1969).
Pasut = KS + )( TSTA
SA
SB KKxTT
TT
(11)
Dimana :
KS = koreksi sebelum pengamatan
KTA = koreksi waktu akhir pengamatan
KTS = koreksi waktu sebelum pengamatan
TB = waktu di base
TS = waktu sebelum pengamatan
TA = waktu akhir pengamatan
2. Koreksi drift (apungan)
Pengukuran gayaberat yang dilakukan di suatu tempat, yang kemudian diulang
lagi pengukuran, secara teoritis harusnya akan tetap atau konstan. Pada
kenyataannya, hal ini selalu diperoleh harga pembacaan yang berbeda,
mengingat adanya pengaruh pasang surut diatas. Perbedaan ini disamping
25
dipengaruhi oleh kondisi pasang surut juga disebabkan karena pengaruh
mekanisme alat, akibat goncangan selama transportasi, yang disebut sebagai
drift atau apungan.
Koreksi drift ini ditentukan dengan anggapan bahwa perubahan drift ini linier
terhadap waktu, sehingga koreksi ini dapat dirumuskan sebagai berikut:
Driftstation =
x ( ) (12)
dimana :
Dstation = besarnya drift pada titik pengamatan
Tstation = waktu pembacaan pada titik pengamatan
GA1 dan GA2 = pembacaan gayaberat ke-1 dan ke-2 di base station
TA1 dan TA2 = waktu pembacaan ke-1 dan ke-2 di Base Station
3. Koreksi lintang (latitude correction)
Telah diketahui bahwa bentuk bumi tidaklah bulat sempurna akan tetapi
berbentuk sferoid dengan pepat pada kedua kutubnya, sehingga besarnya harga
gayaberat di kutub dan di khatulistiwa tidak sama. Dengan adanya perbedaan
ini maka koreksi lintang sangat mempengaruhi besar gayaberat di suatu daerah.
Dalam penelitian ini digunakan koreksi lintang dari International Assosiation
of Geodesy System (IAG.1967) dengan rumusan (Blakely,1955) yaitu:
2sin0000058.0sin0053024.01846.978031 22 ng (13)
Nilai gayaberat teoritik pada lintang diberikan oleh Moritz (1980) :
) 2 Sin10 5,8 Sin10 5.30241 978.032,7(g 2-62-3 mGal (14)

26
Koreksi ini dilakukan karena bentuk bumi yang tidak bulat sempurna,
terdapat perbedaan antara jari-jari bumi di kutub dengan di katulistiwa. Nilai
gayaberat dikutub akan lebih besar dibandingkan nilai gayaberat di
katulistiwa, seperti ditunjukkan pada Gambar 9.
Gambar 9. Perbedaan nilai gayaberat di kutub dengan di khatulistiwa
4. Koreksi udara bebas (free air correction)
Koreksi udara bebas adalah koreksi yang digunakan untuk menghilangkan
perbedaan harga gayaberat yang disebabkan oleh pengaruh ketinggian antara
pengamatan dengan titik datum referensi. Pada koreksi udara bebas hanya
memperhitungkan elevasi antara titik pengamatan dengan titik datum referensi
dengan mengabaikan massa diantaranya. Besar koreksi udara bebas ini adalah
(Grant & West, 1965):
Equator
l
a
b
Kutub
Garis normal
Gambar 8. Elipsoid sebagai bentuk bumi

27
KUB = 0,3086 h mgal (15)
dimana : h = ketinggian titik amat
KUB = koreksi udara bebas
Gambar 10. Titik amat P pada ketinggian h terhadap permukaan acuan
Koreksi udara bebas dilakukan terhadap titik-titik pengukuran yang terletak
pada ketinggian h dari permukaan air laut. Koreksi gayaberat yang dihitung
dari persamaan gayaberat normal bumi dengan bentuk ellipsoid.
hh
ggg h
, (16)
2sin212
fmfa
g
h
g
(17)
308765.0
h
untuk
0 (18)
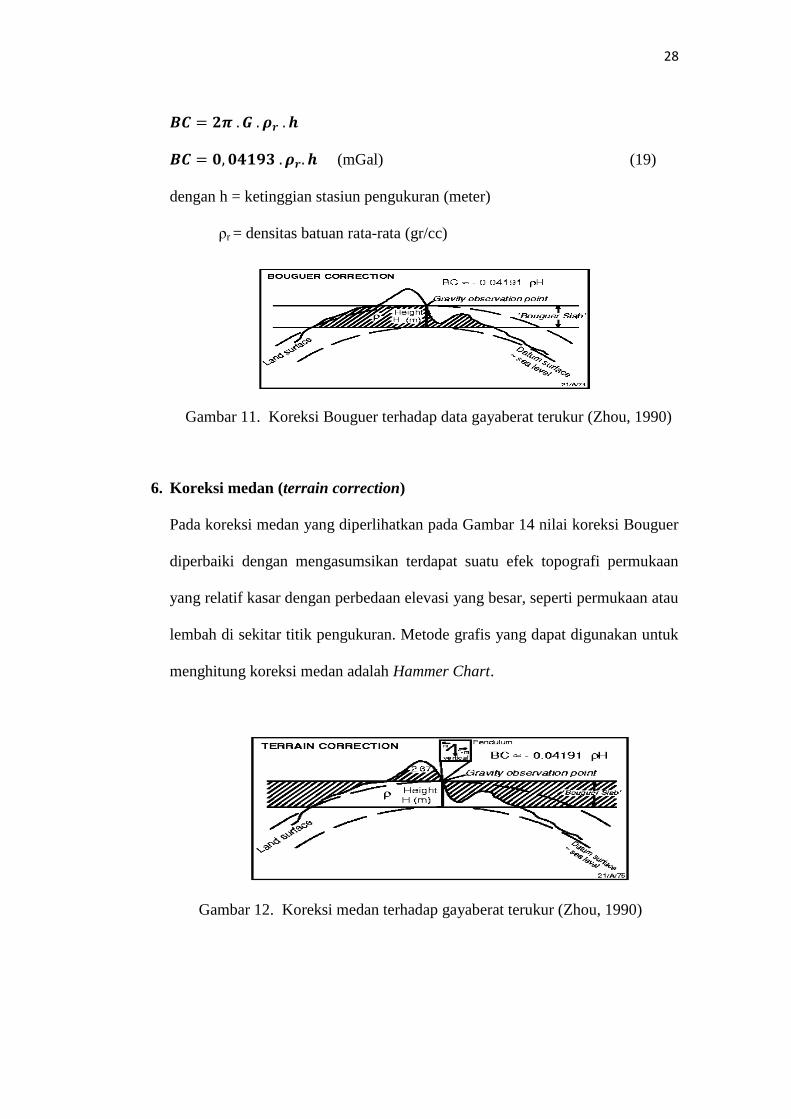
5. Koreksi Bouguer (Bouguer correction)
Pada koreksi udara bebas belum diperhitungkan adanya efek tarikan dari massa
yang berada di antara bidang datum dan stasiun pengukuran itu sendiri, untuk
itu pengukuran di darat efek tarikan dari massa tersebut menyebabkan
peningkatan nilai Δg. Koreksi Bouguer berfungsi untuk mereduksi pangaruh
efek tarikan dari suatu massa yang diberikan pada persamaan:
Geoid
P
P0
h
28
(mGal) (19)
dengan h = ketinggian stasiun pengukuran (meter)
ρr = densitas batuan rata-rata (gr/cc)
Gambar 11. Koreksi Bouguer terhadap data gayaberat terukur (Zhou, 1990)
6. Koreksi medan (terrain correction)
Pada koreksi medan yang diperlihatkan pada Gambar 14 nilai koreksi Bouguer
diperbaiki dengan mengasumsikan terdapat suatu efek topografi permukaan
yang relatif kasar dengan perbedaan elevasi yang besar, seperti permukaan atau
lembah di sekitar titik pengukuran. Metode grafis yang dapat digunakan untuk
menghitung koreksi medan adalah Hammer Chart.
Gambar 12. Koreksi medan terhadap gayaberat terukur (Zhou, 1990)
29
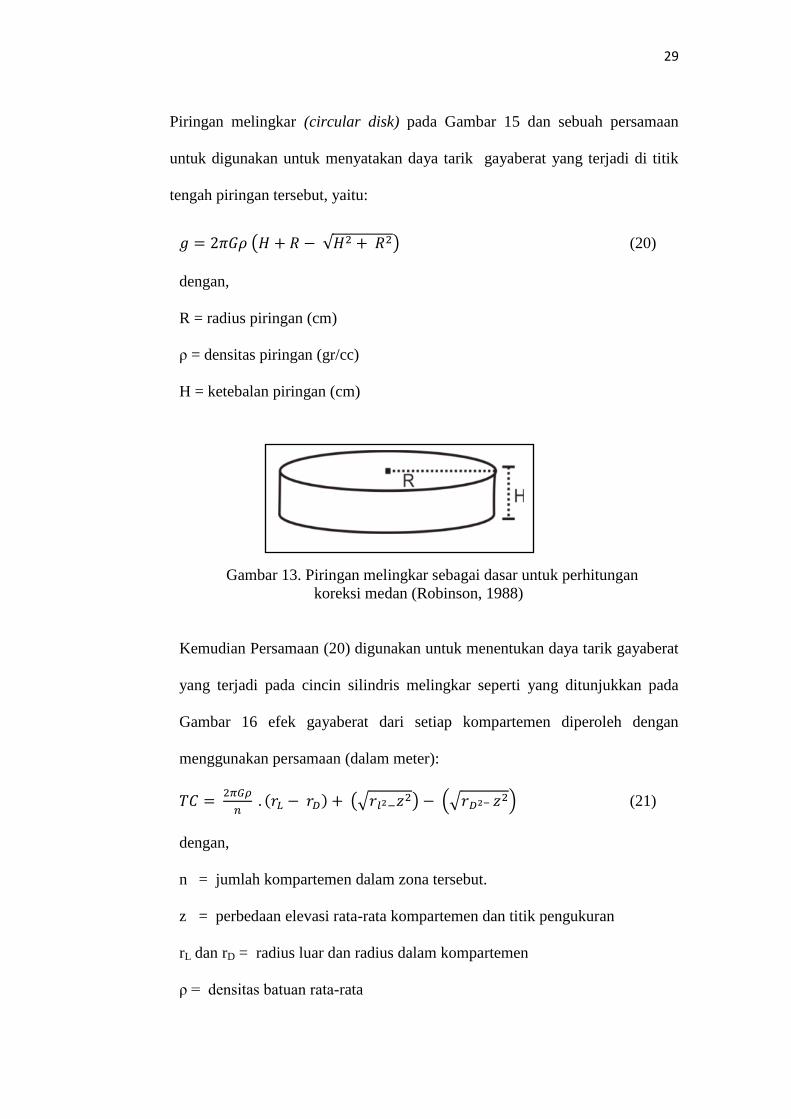
Piringan melingkar (circular disk) pada Gambar 15 dan sebuah persamaan
untuk digunakan untuk menyatakan daya tarik gayaberat yang terjadi di titik
tengah piringan tersebut, yaitu:
( √ ) (20)
dengan,
R = radius piringan (cm)
ρ = densitas piringan (gr/cc)
H = ketebalan piringan (cm)
Gambar 13. Piringan melingkar sebagai dasar untuk perhitungan
koreksi medan (Robinson, 1988)
Kemudian Persamaan (20) digunakan untuk menentukan daya tarik gayaberat
yang terjadi pada cincin silindris melingkar seperti yang ditunjukkan pada
Gambar 16 efek gayaberat dari setiap kompartemen diperoleh dengan
menggunakan persamaan (dalam meter):
( ) (√ ) (√ ) (21)
dengan,
n = jumlah kompartemen dalam zona tersebut.
z = perbedaan elevasi rata-rata kompartemen dan titik pengukuran
rL dan rD = radius luar dan radius dalam kompartemen
ρ = densitas batuan rata-rata
30
Gambar 14. Cincin silindris melingkar yang terbagi menjadi 8 segmen
untuk menghitung koreksi medan (Robinson, 1988)
Gambar 15. Hammer Chart untuk menghitung koreksi medan
(Reynolds, 1997)
7. Anomali Bouguer (Bouguer anomaly)
Setelah dilakukan koreksi terhadap data percepatan gayaberat hasil
pengukuran, maka akan diperoleh anomali percepatan gayaberat yaitu
(Blakely, 1995):
a. Anomali udara bebas (g fa)
hggg nobfa 03086.0 (22)
31
b. Anomali Bouguer (gbg)
1. Anomali Bouguer sederhana (Δgbgs)
hhggg nobobs 04193.003086.0 (23)
2. Anomali Bouguer lengkap (Δgbg)
TChhggg nobbg 04193.003086.0 (24)
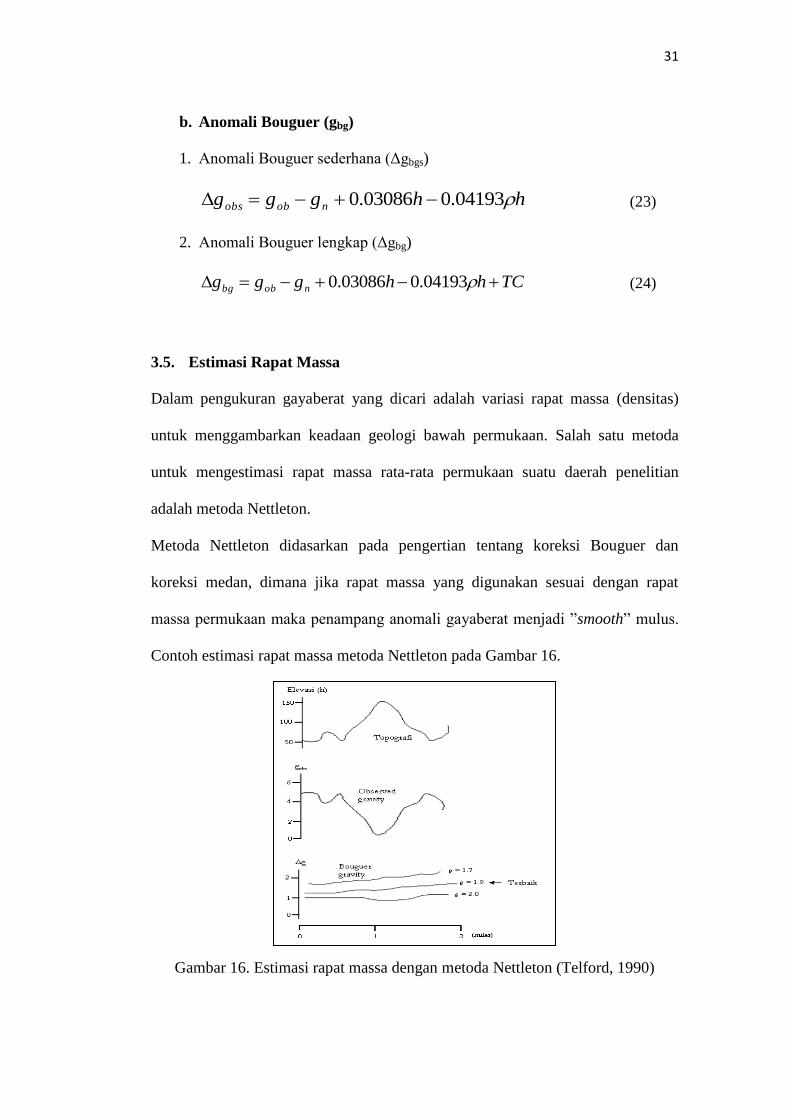
3.5. Estimasi Rapat Massa
Dalam pengukuran gayaberat yang dicari adalah variasi rapat massa (densitas)
untuk menggambarkan keadaan geologi bawah permukaan. Salah satu metoda
untuk mengestimasi rapat massa rata-rata permukaan suatu daerah penelitian
adalah metoda Nettleton.
Metoda Nettleton didasarkan pada pengertian tentang koreksi Bouguer dan
koreksi medan, dimana jika rapat massa yang digunakan sesuai dengan rapat
massa permukaan maka penampang anomali gayaberat menjadi ”smooth” mulus.
Contoh estimasi rapat massa metoda Nettleton pada Gambar 16.
Gambar 16. Estimasi rapat massa dengan metoda Nettleton (Telford, 1990)
32
N
i
i
N
i
ii
h
hg
k
1
2
1
(25)
dimana N = jumlah stasiun
Secara kuantitatif metoda ini menerapkan korelasi silang antara perubahan elevasi
terhadap referensi tertentu dengan anomali gayaberatnya. Nilai korelasi silang
yang terkecil merupakan rapat massa permukaan rata-rata yang terbaik.
3.6. Pemisahaan Anomali Regional – Residual
Anomali gayaberat yang terukur di permukaan pada dasarnya merupakan
gabungan berbagai macam sumber dan kedalaman anomali yang berada dibawah
permukaan dimana salah satunya merupakan target event dalam eksplorasi. Untuk
kepentingan interpretasi, target event harus dipisahkan dari event lainya yang tidak
diperlukan. Target event dapat berada di zona yang dalam (regional) atau di zona
dangkal (residual).
Metoda moving average merupakan salah satu cara untuk memisahkan anomali
regional-residual dengan noise. Metoda moving average dilakukan dengan cara
merata-ratakan nilai anomali, proses perata-rataan dilakukan untuk tiap titik
pengamatan dan bergerak dari satu titik ke titik lainnya. Hasil metoda moving
average adalah anomali regional, sedangkan anomali residualnya diperoleh
dengan mengurangkan anomali Bouguer lengkap terhadap anomali regional.
Secara matematis pada kasus 1-D anomali regional dari moving average adalah :
N
nigignigig r
...... (26)

33
Dimana N adalah lebar jendela yang harus bilangan ganjil, n adalah (N-1)/2.
Semakin lebar jendela yang digunakan, maka nilai anomali residualnya mendekati
nilai CBA, demikian juga sebaliknya semakin kecil jendela yang digunakan, maka
anomali regional mendekati nilai CBA atau anomali residualnya nol.
Penerapan moving average pada data 2-D dengan lebar jendela 5x5 dapat
diilustrasikan seperti Gambar 17. Nilai rg pada suatu titik dapat dihitung dengan
merata-ratakan semua nilai BOUGUERg didalam sebuah kotak persegi dengan titik
pusat adalah titik yang akan dihitung harga rg .
Gambar 17. Ilustrasi moving average dua dimensi jendela 5x5 (Robinson, 1988)
Persamaannya diberikan :
1 2 3 25
1......
25R B B B Bg g g g g (27)
3.7. Analisa Spektrum
Analisa spektrum dilakukan untuk mengestimasi lebar jendela dan mengestimasi
kedalaman dari anomali gayaberat. Selain itu analisa spektrum juga dapat
digunakan untuk membandingkan respon spektrum dari berbagai metode filtering.
Analisa spektrum dilakukan dengan men-transformasi Fourier lintasan-lintasan
yang telah ditentukan.

34
Spektrum diturunkan dari potensial gayaberat yang teramati pada suatu bidang
horisontal dimana transformasi Fouriernya sebagai berikut ( Blakely, 1996 ) :
rFUF
1)( dan
k
e
rF
zzk '0
21
(28)
dimana, U = potensial gayaberat = konstanta gayaberat
= anomali rapat massa r = jarak
sehingga persamaannya menjadi :
k
eUF
zzk '0
2)(
(29)
Berdasarkan Persamaan (29), transformasi Fourier anomali gayaberat yang
diamati pada bidang horisontal diberikan oleh :
rF
z
rzFgF z
1
1)(
(30)
'02)(zzk
z egF
(2.7-3)
dimana gz = anomali gayaberat k = bilangan gelombang
z 0 = ketinggian titik amat z = kedalaman benda anomali
Jika distribusi rapat massa bersifat random dan tidak ada korelasi antara masing-
masing nilai gayaberat, maka : =1, sehingga hasil transformasi Fourier anomali
gayaberat menjadi :
'0 zzk
eCA
(31)
dimana A = amplitudo dan C = konstanta.
35
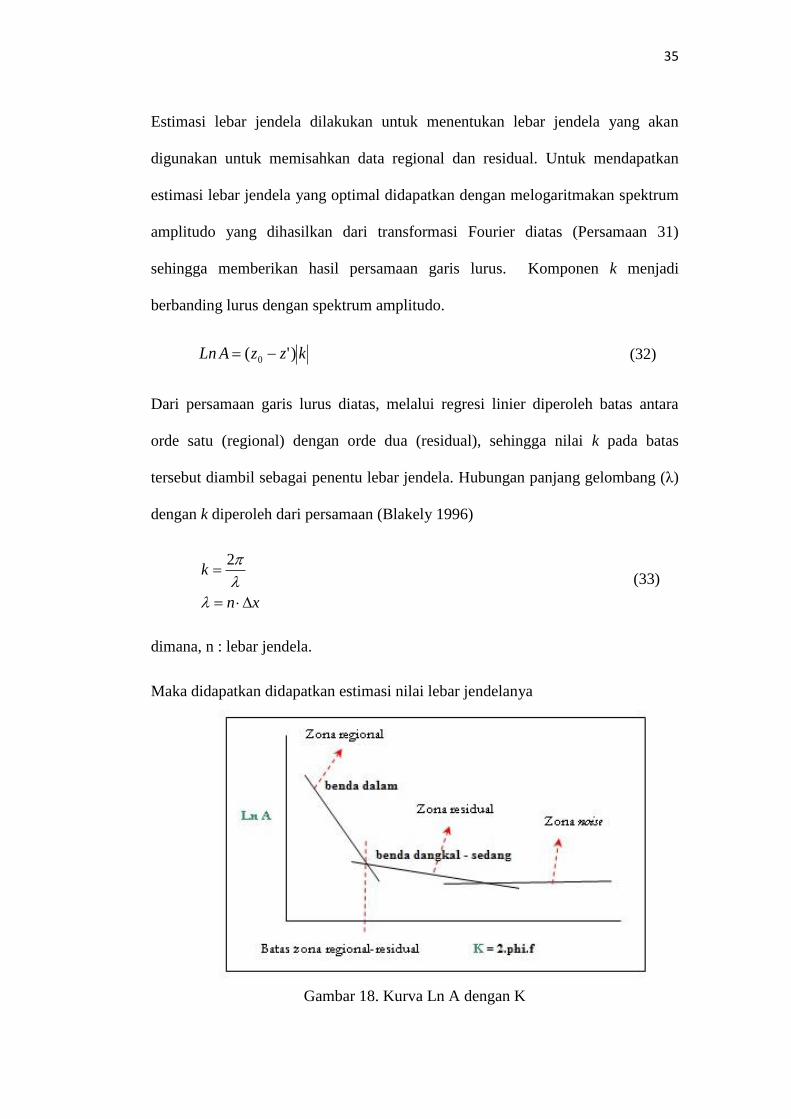
Estimasi lebar jendela dilakukan untuk menentukan lebar jendela yang akan
digunakan untuk memisahkan data regional dan residual. Untuk mendapatkan
estimasi lebar jendela yang optimal didapatkan dengan melogaritmakan spektrum
amplitudo yang dihasilkan dari transformasi Fourier diatas (Persamaan 31)
sehingga memberikan hasil persamaan garis lurus. Komponen k menjadi
berbanding lurus dengan spektrum amplitudo.
kzzALn )'( 0 (32)
Dari persamaan garis lurus diatas, melalui regresi linier diperoleh batas antara
orde satu (regional) dengan orde dua (residual), sehingga nilai k pada batas
tersebut diambil sebagai penentu lebar jendela. Hubungan panjang gelombang (λ)
dengan k diperoleh dari persamaan (Blakely 1996)
2k
n x
(33)
dimana, n : lebar jendela.
Maka didapatkan didapatkan estimasi nilai lebar jendelanya
Gambar 18. Kurva Ln A dengan K
36
Untuk estimasi kedalaman diperoleh dari nilai gradien persamaan garis lurus
diatas, Persamaan 33 (z0 –z’). Nilai gradien hasil regresi linier zona regional
menunjukkan kedalaman regional dan nilai hasil regresi linier zona residual
menunjukkan kedalaman residual.
3.8. Derivatif Vertikal Orde Dua (Second Vertical Derivative)
Second Vertical Derivative (SVD) anomali Bouguer merupakan salah satu teknik
filtering yang dapat memunculkan anomali residual (efek dangkal). Adanya
struktur patahan disuatu daerah akan dapat diketahui dengan baik menggunakan
teknik ini.
Secara teoritis, metoda ini diturunkan dari fungsi harmonik Laplace dengan
mensubtitusi f dengan Δg dalam kasus gayaberat, yaitu :
2
2 2 22
2 2 2
0
( ) ( ) ( )
g
g g gg
x y z
(34)
Sehingga,
2 2 2
2 2 2
( ) ( ) ( )g g g
z x y
(35)
atau
2 2 2
2 2 2
g g g+ + = 0
x y z
(36)
sehingga second vertical derivative diberikan oleh Darby:
2 2 2
2 2 2
g g g
z x y
(37)
Untuk data 1-D (data penampang) persamaannya menjadi :
37
2 2
2 2
g g
z x
(38)
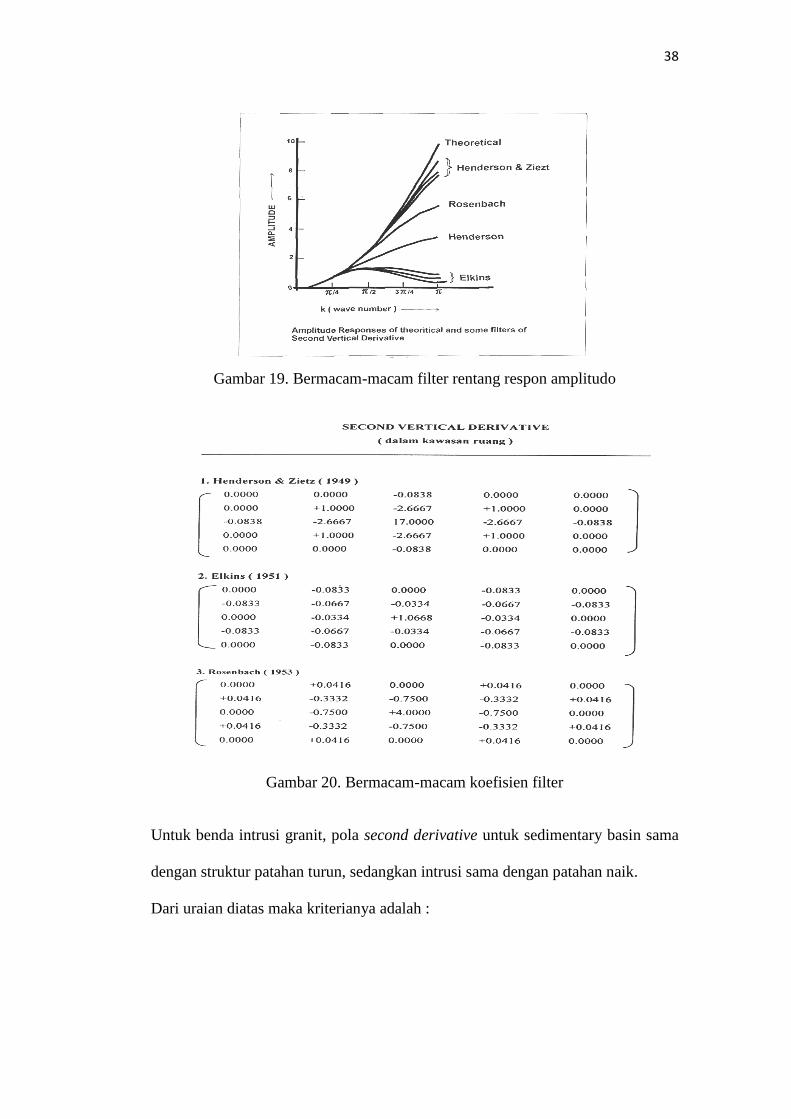
Terdapat beberapa operator filter SVD, yang dihitung oleh Henderson dan Zeits
(1949), Elkins (1951) dan Rosenbach (1952). Dalam penelitian ini, penulis
menggunakan operator filter SVD hasil perhitungan Elkins.
Persamaan. (38) menunjukkan bahwa second vertical derivative dari suatu
anomali gayaberat permukaan adalah sama dengan negatif dari derivatif orde dua
horizontal. Artinya bahwa anomali second vertical deivative dapat melalui
derivatif horizontal yang secara praktis lebih mudah dikerjakan. Contoh grafis
proses penurunan second vertical derivative untuk data penampang diberikan pada
Gambar 21.
Untuk data anomali gayaberat dalam grid teratur, anomali second vertical
derivative dapat diturunkan melalui proses filtering dimana pers. Konvolusinya
diberikan oleh :
dxdyyvxxFyxgyxgsvd ,,,
(39)
dimana F adalah filter secod vertical derivative sesuai dengan Persamaan 39) dan
g adalah anomali gayaberat sebagai data input. Beberapa filter second vertical
derivative mempunyai respons amplitudo seperti diberikan pada Gambar 20,
sedangkan contoh operator filter 2-D diberikan pada Gambar 21.
38
Gambar 19. Bermacam-macam filter rentang respon amplitudo
Gambar 20. Bermacam-macam koefisien filter
Untuk benda intrusi granit, pola second derivative untuk sedimentary basin sama
dengan struktur patahan turun, sedangkan intrusi sama dengan patahan naik.
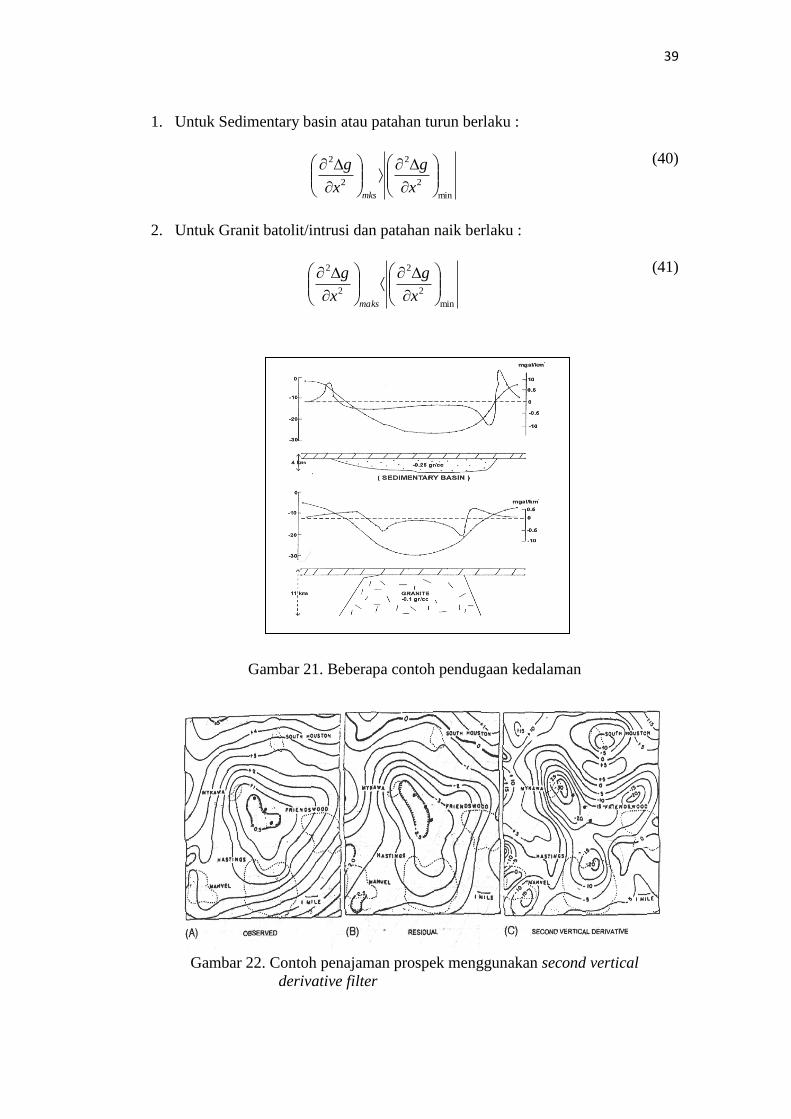
Dari uraian diatas maka kriterianya adalah :
39
1. Untuk Sedimentary basin atau patahan turun berlaku :
min
2
2
2
2
x
g
x
g
mks
(40)
2. Untuk Granit batolit/intrusi dan patahan naik berlaku :
min
2
2
2
2
x
g
x
g
maks
(41)
Gambar 21. Beberapa contoh pendugaan kedalaman
Gambar 22. Contoh penajaman prospek menggunakan second vertical
derivative filter
40
3.9. Pemodelan Tiga Dimensi (3D)
Dalam Penelitian ini dilakukan pemodelan 3D dengan menggunakan software
Grav3D versi 2.0. Hal ini dilakukan setelah data gayaberat sudah terkoreksi
dan dipisahkan antara anomali lokal dan anomali regional. Pada tahap
pemodelan, data gayaberat digunakan untuk menafsirkan model geologi dan
struktur bawah permukaan berdasarkan distribusi densitas batuannya. Secara
teknis pemodelan dilakukan menggunakan model benda 3D berbentuk
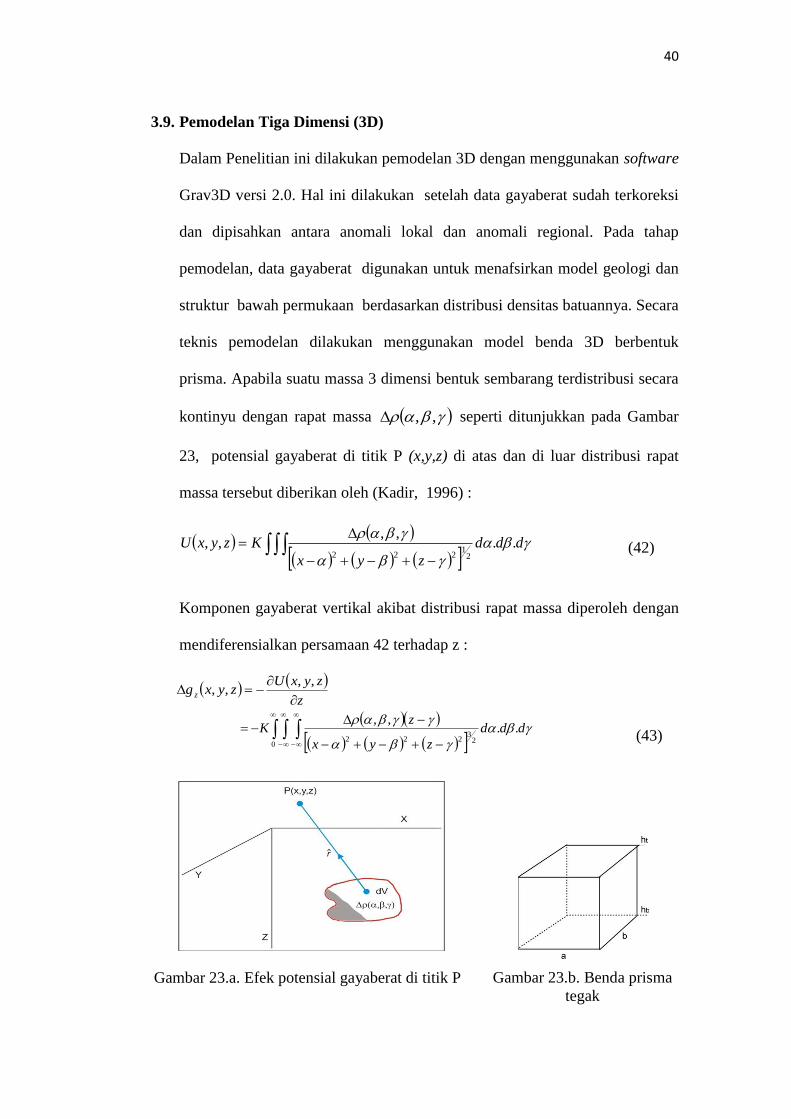
prisma. Apabila suatu massa 3 dimensi bentuk sembarang terdistribusi secara
kontinyu dengan rapat massa ,, seperti ditunjukkan pada Gambar
23, potensial gayaberat di titik P (x,y,z) di atas dan di luar distribusi rapat
massa tersebut diberikan oleh (Kadir, 1996) :
ddd
zyx
KzyxU ..,,
,,2
1222
(42)
Komponen gayaberat vertikal akibat distribusi rapat massa diperoleh dengan
mendiferensialkan persamaan 42 terhadap z :
z
zyxUzyxg z
,,,,
02
3222
..,,
ddd
zyx
zK
(43)
Gambar 23.a. Efek potensial gayaberat di titik P Gambar 23.b. Benda prisma
tegak

41
Pendekatan perhitungan respon gayaberat dengan menggunakan benda
prisma sisi tegak dengan spasi x dan y merupakan salah satu alternatif
yang dapat dilakukan, kesesuaian model benda di lapangan bergantung pada
jumlah dan dimensi prisma yang disusun. Dengan mengambil lebar sisi
horisontal a dan b pada arah dan , kedalaman puncak dan dasar adalah ht
dan hb, maka komponen vertikal gayaberat pada z=0 adalah:
b
t
h
h
z ddd
yx
SKyxg
..
,)0,,(
23
222
(44)
dimana :
S(,) = distribusi fungsi undak rectangular
=1 untuk
dan
(45)
Plouf ( 1976), menghitung respon gayaberat yang disebabkan oleh model
benda berbentuk prisma:
2 2 2
1 1 1
arctan log logi iijk k i ijk i i ijk i
i j k k ijk
x yg G z x R y y R x
z R
(46)
dimana : 2 2 2
ijk i j kR x y z 1 1 1i j k
ijk (47)