Download - Pengendalian Sistem Antena Otomatis
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 1/11
SISTEM KONTROL ANTENA
NAMA KELOMPOK :
Arbi Riantono Peter Lewis H. P
Felicia Anggraini Sunaryo
Jona Tegar Saputra Taufi Ramuli
M. Luthfi Setyana Trisno Mandraguna
M. Rizky Yendri Minggu Bali
NAMA DOSEN :
Dr. Ir. Engkos A. Kosasih M.T.
FAKULTAS TEKNIK
UNIVERSITAS INDONESIA
DEPOK
2012
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 2/11
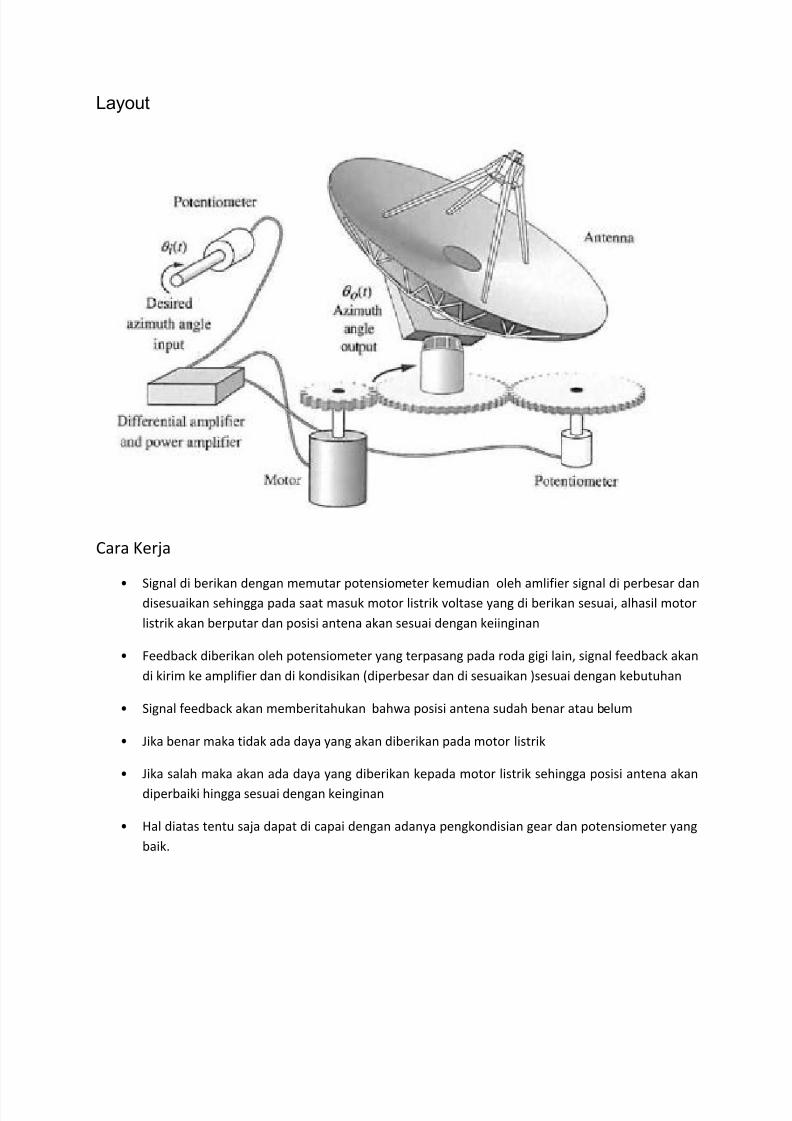
Layout
Cara Kerja
•
Signal di berikan dengan memutar potensiometer kemudian oleh amlifier signal di perbesar dandisesuaikan sehingga pada saat masuk motor listrik voltase yang di berikan sesuai, alhasil motor
listrik akan berputar dan posisi antena akan sesuai dengan keiinginan
• Feedback diberikan oleh potensiometer yang terpasang pada roda gigi lain, signal feedback akan
di kirim ke amplifier dan di kondisikan (diperbesar dan di sesuaikan )sesuai dengan kebutuhan
• Signal feedback akan memberitahukan bahwa posisi antena sudah benar atau belum
• Jika benar maka tidak ada daya yang akan diberikan pada motor listrik
• Jika salah maka akan ada daya yang diberikan kepada motor listrik sehingga posisi antena akan
diperbaiki hingga sesuai dengan keinginan
• Hal diatas tentu saja dapat di capai dengan adanya pengkondisian gear dan potensiometer yang
baik.
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 3/11
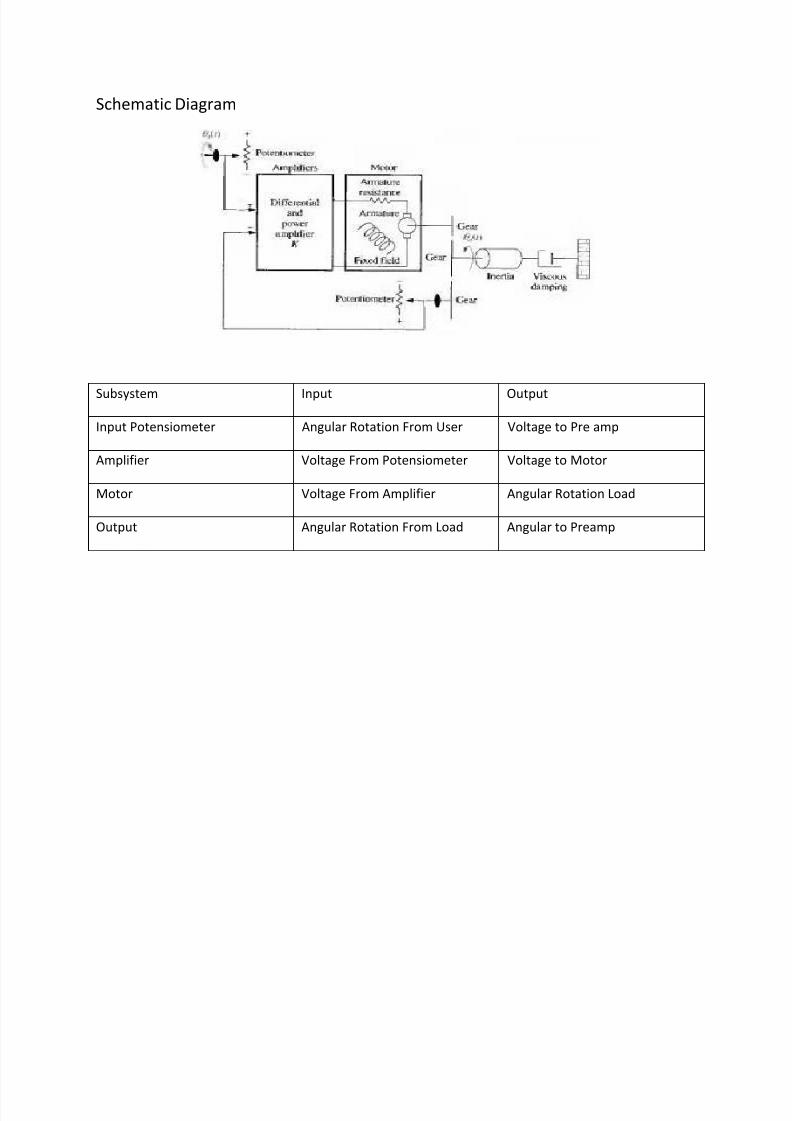
Schematic Diagram
Subsystem Input Output
Input Potensiometer Angular Rotation From User Voltage to Pre amp
Amplifier Voltage From Potensiometer Voltage to Motor
Motor Voltage From Amplifier Angular Rotation Load
Output Angular Rotation From Load Angular to Preamp
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 4/11
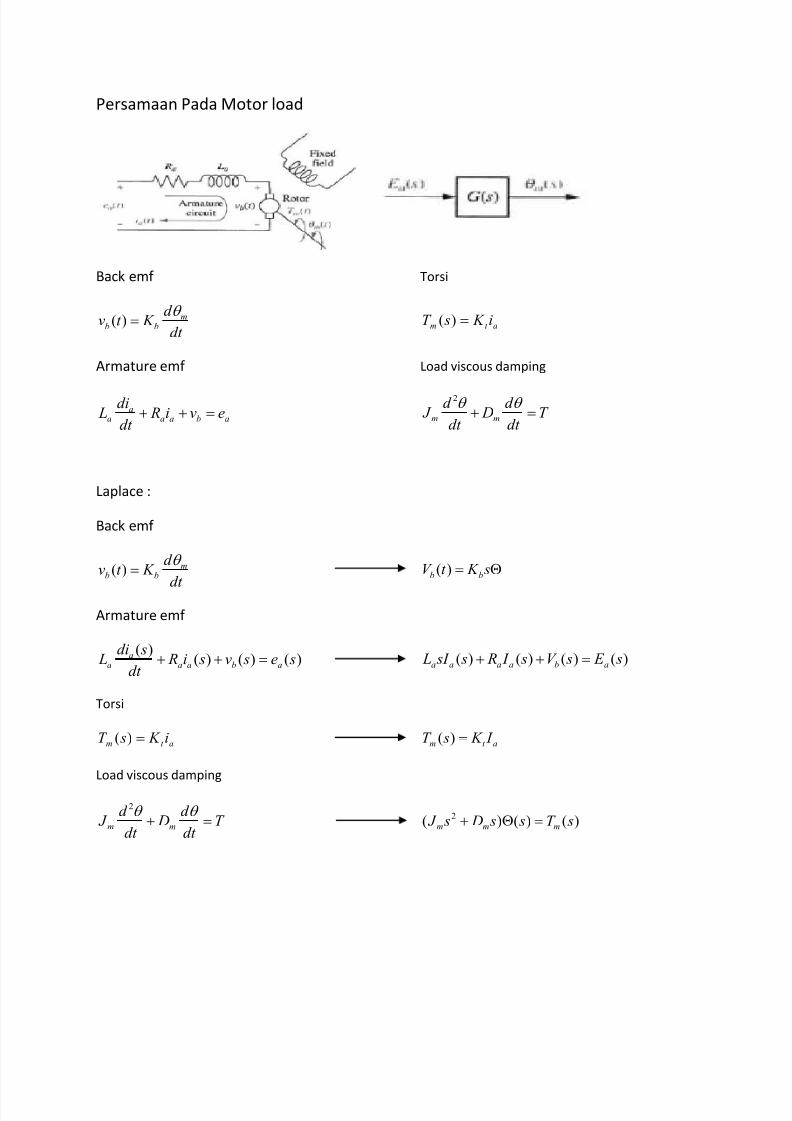
Persamaan Pada Motor load
Back emf Torsi
dt
d K t v
m
bb
)(
at mi K sT )(
Armature emf Load viscous damping
abaa
a
aevi R
dt
di L T
dt
d D
dt
d J
mm
2
Laplace :
Back emf
dt
d K t v
m
bb
)( s K t V
bb)(
Armature emf
)()()()(
se sv si Rdt
sdi L
abaa
a
a )()()()( s E sV s I R s sI L
abaaaa
Torsi
at mi K sT )(
at mI K sT )(
Load viscous damping
T dt
d D
dt
d J
mm
2
)()()( 2 sT s s D s J
mmm

7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 5/11
Substitusi Persamaan
armature emf +back emf+ torsi
)()()()(
s E s s K K
sT s L Ramb
t
maa
armature emf +back emf+ torsi+viscous damping
)()()())(( 2
s E s s K K
s s D s J s L Ramb
t
mmaa
La is smaller than Ra so be neglegted
)()()( s E s s K D s J K
Rambmm
t
a
So transfer function
a
bt
m
m
mat
a
m
R
K K D
J s s
J R K
s E
s
(1
)/(
)(
)(
)()(
)(
s s
K
s E
s
a
m

7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 6/11
Input Value
2
2
1
N N J J J
Lam
2
2
1
N
N D D D
Lam
Dengan Nilai Notasi sebagai berikut
02.0a J 1
L J 251
N 2502 N 01.0
a D 1 L D 5.0
t K 5.0
b K 8a R
Lalu masukkan pada persamaan diatas
03.0250
25102.0
2
m J 02.0
250
25101.0
2
m D
)71.1(
083.2
8
5.05.002.0(
03.0
1
)03.08/(5.0
)(
)(
s s x s s
x
s E
s
a
m
Dikalikan dengan rasio gear
)71.1(
2083.0
)(
)(1.0
)(
)(0
s s s E
s
s E
s
a
m
a
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 7/11
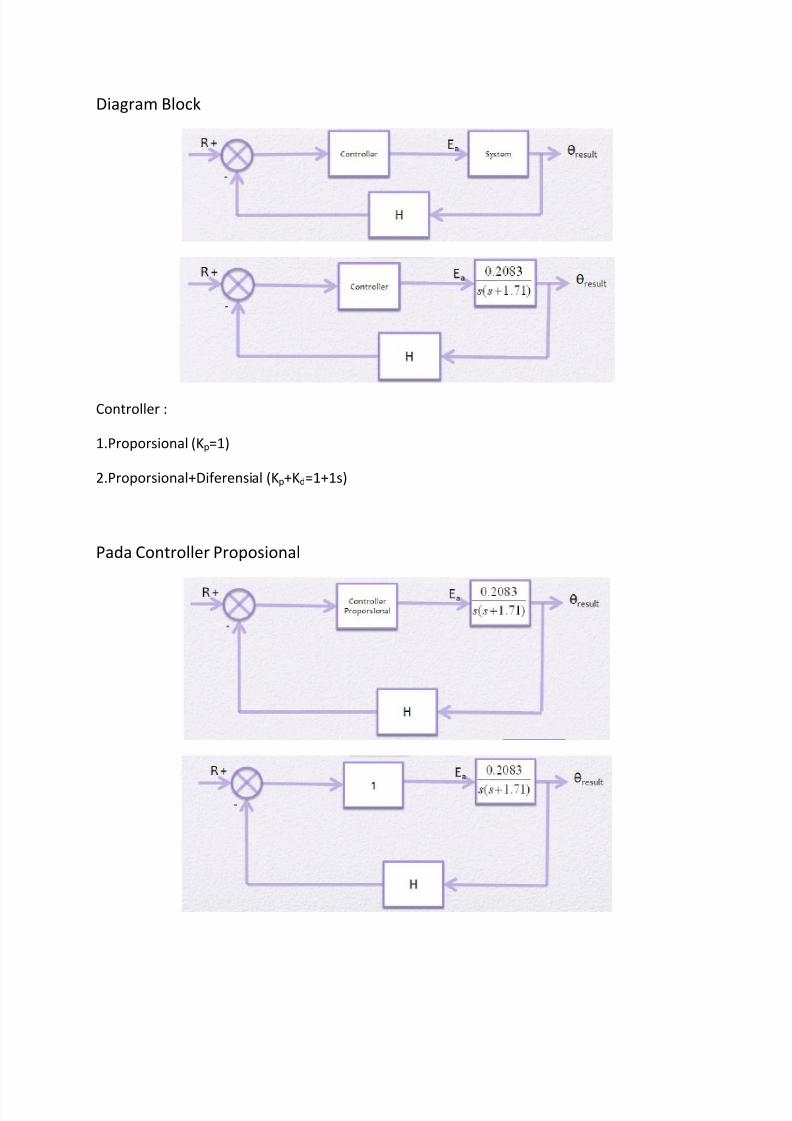
Diagram Block
Controller :
1.Proporsional (Kp=1)
2.Proporsional+Diferensial (Kp+Kd=1+1s)
Pada Controller Proposional
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 8/11
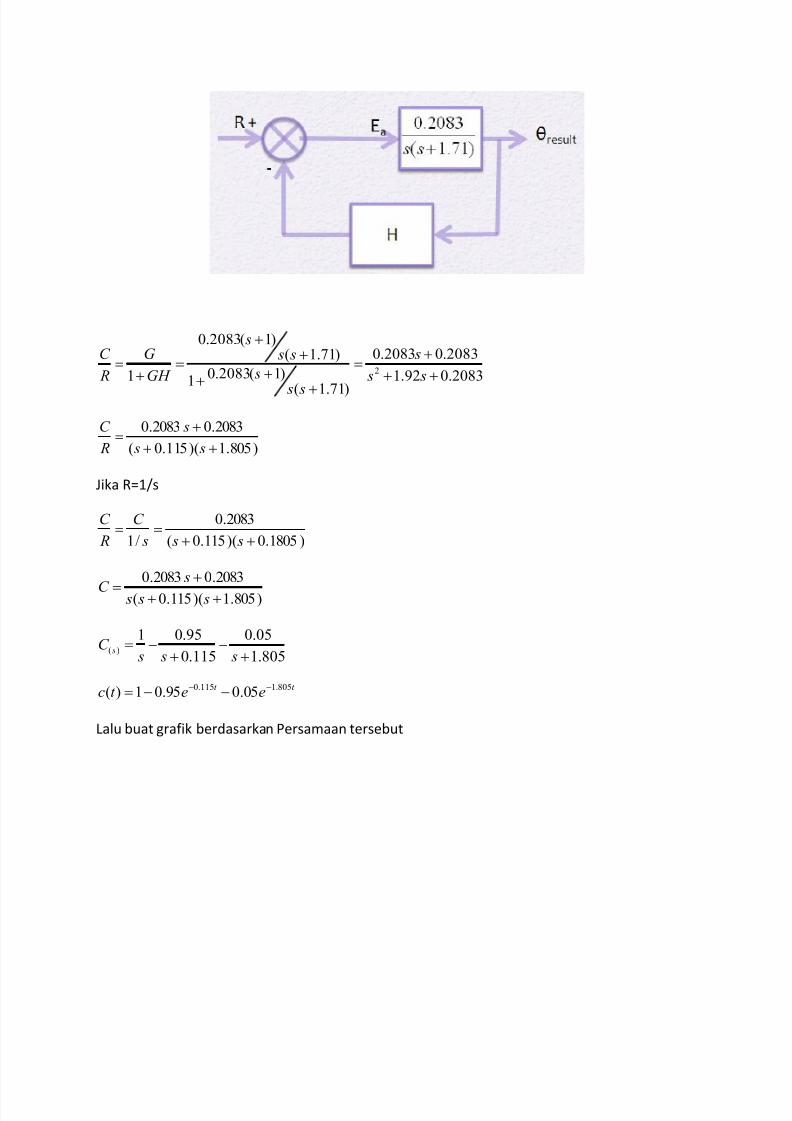
2083.092.1
2083.02083.0
)71.1(
)1(2083.01
)71.1()1(2083.0
12
s s
s
s s
s
s s
s
GH
G
R
C
)805.1)(115.0(
2083.02083.0
s s
s
R
C
Jika R=1/s
)1805.0)(115.0(
2083.0
/1
s s s
C
R
C
)805.1)(115.0(
2083.02083.0
s s s
s
C
805.1
05.0
115.0
95.01)(
s s sC
s
t t eet c
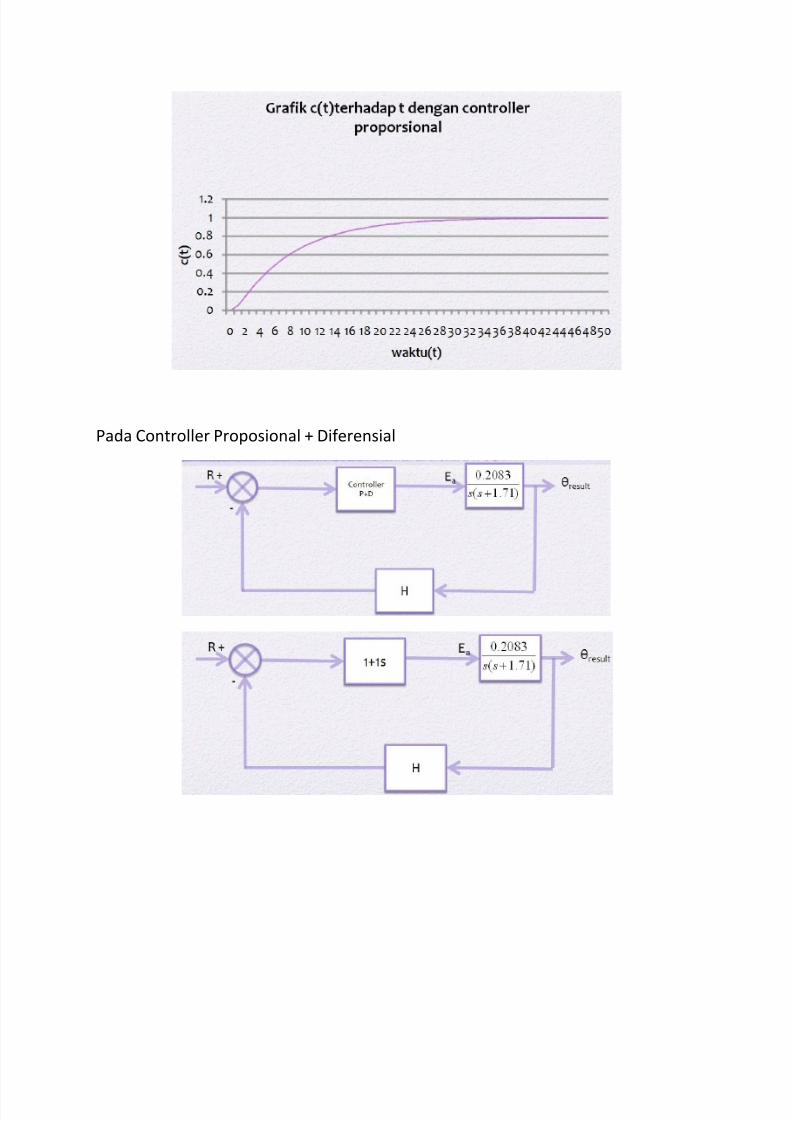
805.1115.0 05.095.01)(
Lalu buat grafik berdasarkan Persamaan tersebut
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 9/11
Pada Controller Proposional + Diferensial

7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 10/11
2083.092.1
2083.02083.0
)71.1()1(2083.0
1
)71.1()1(2083.0
1 2
s s
s
s s
s
s s
s
GH
G
R
C
)805.1)(115.0(
2083.02083.0
s s
s
R
C
)1805.0)(115.0(
2083.0
/1
s s s
C
R
C
)805.1)(115.0(
2083.02083.0
s s s
sC
805.105.0
115.095.01
)(
s s s
C s
t t eet c
805.1115.0 05.095.01)(
7/27/2019 Pengendalian Sistem Antena Otomatis
http://slidepdf.com/reader/full/pengendalian-sistem-antena-otomatis 11/11
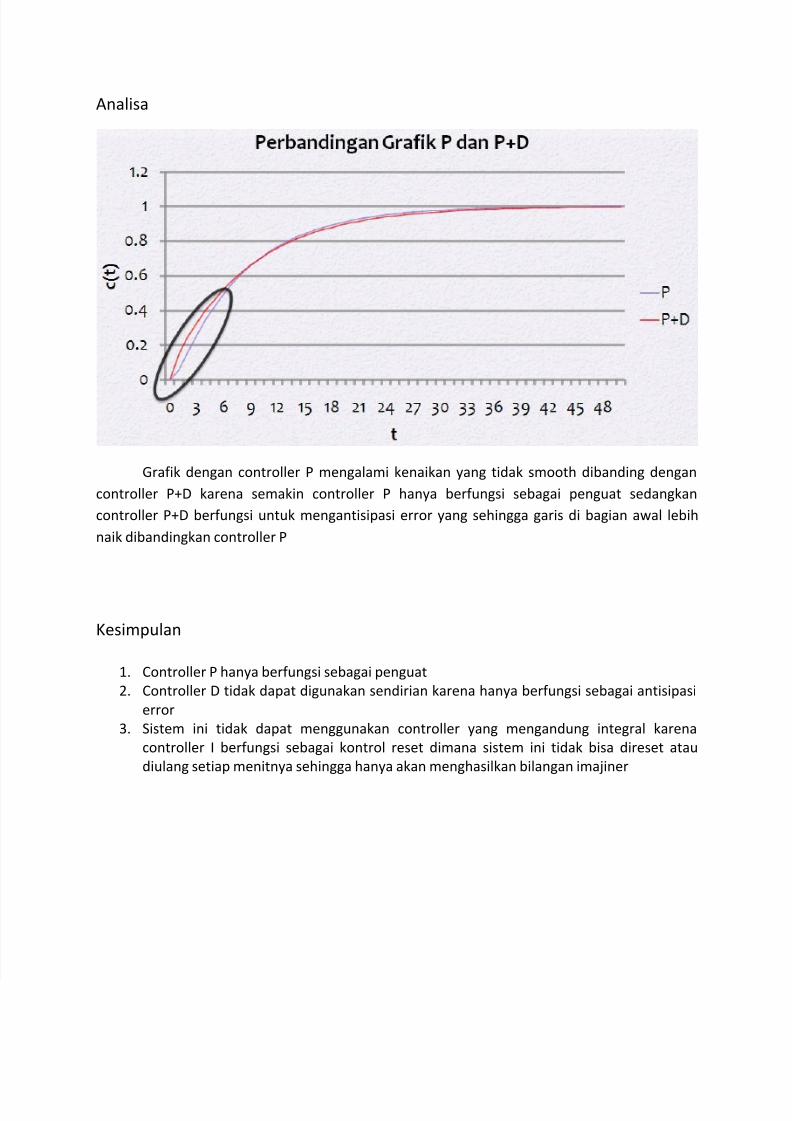
Analisa
Grafik dengan controller P mengalami kenaikan yang tidak smooth dibanding dengan
controller P+D karena semakin controller P hanya berfungsi sebagai penguat sedangkan
controller P+D berfungsi untuk mengantisipasi error yang sehingga garis di bagian awal lebih
naik dibandingkan controller P
Kesimpulan
1. Controller P hanya berfungsi sebagai penguat
2. Controller D tidak dapat digunakan sendirian karena hanya berfungsi sebagai antisipasi
error
3. Sistem ini tidak dapat menggunakan controller yang mengandung integral karena
controller I berfungsi sebagai kontrol reset dimana sistem ini tidak bisa direset atau
diulang setiap menitnya sehingga hanya akan menghasilkan bilangan imajiner







