Download - Maintenance 1
KEANDALAN DANPERAWATAN
OlehIr. Dwi Priyanta, MSE
Tentang Modul Ajar
MODUL 1 Konsep Dasar
MODUL 2 Metode PengkajianKeandalan Bagian 1
MODUL 3 Metode PengkajianKeandalan Bagian 2
MODUL 4 Metode PengkajianKeandalan Bagian 3
MODUL 5 Strategi Untuk Kebijaksanaan Perawatan
Tentang Penulis
JURUSAN TEKNIK SISTEM PERKAPALANFAKULTAS TEKNOLOGI KELAUTANINSTITUT TEKNOLOGI SEPULUH NOPEMEBERSURABAYA
© Copyright ada pada penulisLast Updated March 2000
TENTANG MODUL AJAR
Modul ajar ini merupakan kumpulan dan rangkuman dari materikuliah keandalan dan perawatan di Jurusan Teknik SistemPerkapalan, Fakultas Teknologi Kelautan ITS, Surabaya. Materikuliah ini dirangkum dari berbagai textbook dan jurnal.
Melalui program Teaching Grant yang merupakan salah satuimplementasi program DUE-Like, penulis berkesempatan untukmengumpulkan dan menulis kembali semua materi kuliah yangdiajarkan dalam bentuk elektronik file. Semua materi disimpandalam bentuk portable document format (pdf) file yang hanya bisadibaca (read only).
Untuk info lebih lanjut mengenai modul ajar ini, pembaca dapatmenghubungi
Ir. Dwi Priyanta, MSEJurusan teknik Sistem PerkapalanFakultas Teknologi KelautanInstitut Teknologi Sepuluh Nopember (ITS)Kampus ITS Keputih SukoliloSURABAYA 60111Telp. (031) 599 4251 ext. 1102Fax. (031) 599 4754
KEMBALI KE MENU UTAMA
KEMBALI KE MENU UTAMA
TTTEEENNNTTTAAANNNGGG PPPEEENNNUUULLLIIISSS
Dwi Priyanta, lahir di kediri pada 1968.Menamatkan pendidikan menengah atasdi SMA Negeri 1 Kediri pada 1987 danmelanjutkan ke Jurusan TeknikPermesinan Kapal - Fakultas TeknologiKelautan – Institut Teknologi SepuluhNopember (ITS) Surabaya melalui jalurPMDK. Setelah menamatkan pendidikanprogram S1 pada 1992, penulis menjadistaf pengajar di jurusan yang sama diITS. Melalui program beasiswa AsianDevelopment Bank (ADB), penulismelanjutkan pendidikan Master di Schoolof Naval Architecture and Marine
Engineering – University of New Orleans, Louisiana – USA pada Agustus1995 dan menamatkan pendidikan master dengan meraih gelar Master ofScience in Engineering (MSE) pada April 1997 dengan bidang keahlianEngineering System Reliability. Setelah menyelesaikan program master,selama tiga bulan penulis menjadi salah satu staff di Freeport SulphurCompany, New Orleans USA – sebuah penambangan belerang milikFreeport yang beroperasi di Gulf of Mexico - dengan tugas untukmelakukan studi implementasi Reliability – Centered Maintenance untuksalah satu sistem. Penulis sekarang menjadi dosen tetap dan kepalalaboratorium System Reliability and Safety di Jurusan Teknik SistemPerkapalan Fakultas Teknologi Kelautan ITS.
KEMBALI KE MENU UTAMA
KEANDALAN DAN PERAWATAN
Konsep Dasar
OlehIr. Dwi Priyanta, MSE
JURUSAN TEKNIK SISTEM PERKAPALANFAKULTAS TEKNOLOGI KELAUTANINSTITUT TEKNOLOGI SEPULUH NOPEMEBERSURABAYA
© Copyright ada pada penulis
MODUL1
DAFTAR ISI MODUL 1
BAB 1 Pengenalan Disiplin Ilmu Keandalan dan Aplikasinya1.1 Pendahuluan1.2 Definisi1.3 Indeks Keandalan1.4 Kajian Keandalan1.5 Aplikasi Keandalan1.6 Referensi dan Bibliografi
BAB 2 Probabilitas2.1 Pendahuluan2.2 Permutasi2.3 Kombinasi2.4 Pemakaian Permutasi dan Kombinasi untuk Perhitungan
Probabilitas2.5 Hukum untuk Menggabungkan Probabilitas2.6 Teorema Binomial2.7 Referensi dan Bibliografi
BAB 3 Pemodelan Jaringan dan Evaluasi Sistem3.1 Pendahuluan3.2 Sistem Dengan Susunan Seri3.3 Sistem Dengan Susuna Paralel3.4 Sistem Dengan Susunan Gabungan Seri – Paralel3.5 Sistem Dengan Susunan Berlebihan Secara Parsial (Partially
Redundant System)3.6 Pertimbangan Desain Antara Susunan Seri dan Paralel
FOR INTERNAL USE ONLY

3.7 Standby Redundant System3.8 Pemodelan Jaringan yang Kompleks3.9 Conditional Probability Approach3.10 Metode Cut Set3.11 Metode Tie Set3.12 Referensi dan Bibliografi
KEMBALI KE MENU UTAMA
FOR INTERNAL USE ONLY
1
Pengenalan Disiplin IlmuKeandalan dan Aplikasinya
1.1 Pendahuluan
Didalam masyarakat modern, para insiyur profesional danmanajer teknik bertanggung jawab terhadap perencanaan, desain,manufaktur dan pengoperasian dari produk yang sederhana sampaisistem yang komplek. Kerusakan dari produk daan sistem ini seringdapat memberi dampak yang bervariasi mulai dari sesuatu yang tidakmenyenangkan dan mengganggu sampai dampak yangmembahayakan terhadap masyarakat dan terhadap lingkungansekitarnya. Para pemakai, konsumen, dan masyarakat umumyamengharapkan produk dan sistem yang handal. Pertanyaan yangmuncul adalah “ seberapa handal atau seberapa aman suatu sistemakan beroperasi selama masa pengoperasiannya dimasa yang akandatang? “ Pertanyaan ini sebagian dapat dijawaaab denganmengunakan evaluasi keandala secara kuantitatif. Konsekuensinyasebuah teknik untuk mendesain dan mengoperasikan dari suatusistem yang sederhana dan komplek bersamaan dengan penambahanjumlah aturan-aturan resmi, termasuk aspek kesetimbangan produk
2
dan agen-agen resmi. Buku ini terutama berkaitan denganpenggambaran teknik pengevaluasian keandalan yang sangat luasdan aplikasinya. Bagaimanapun, adalah suatu yang berguna untukmendiskusikan beberapa isu dan filosofi yang berkaitan dengankeandalan untuk meletakkan teknik pengevalusian ini kedalam suatuperspektif dan mengidentifikasi latar belakang dari berbagai teknikpengevaluasian dan pengukuran yang telah dikembangkan dan jugauntuk menunjukan mengapa teknik ini dikembangkan.
Pengembangan teknik pengevaluasian keandalan pada awalnyaberhubungan dengan industri ruang angkasa dan aplikasi militer.Pengembangan teknik inii diikuti dengan cepat oleh aplikasi di reaktornuklir, yang pada saat ini dibawah tekanan yang sangat kuat untukmemastikan reaktor nuklir yang aman dan handal: dibidangpenyuplaian listrik, yang diharapkan dapat menyuplai kebutuhanenergi tanpa kerusakan lokal atau kerusakan dalam skala yangbesar: dan di pengolahan –pengolahan yang memiliki proses yangkontinu seperti pengolahan baja dan pengolahan bahan kimia, yangdapat mengalami penundaan dan kerugian yang besay jika terjadikegagalan pada sistem maupun yang menyebabkan kematian danpolusi lingkungan. Semua area yang telah disebutkan telahmengalami beberapa masalah akhir-akhir ini. Masalah-masalah initermasuk kecelakaan dibidang ruang angkasa (Pesawat ruangangkasa Chalelenger, 1986: beberapa kecelakaan pesawat terbangkomersial), kecelakaan dibidang nuklir (Three Mile Island, 1979;Chernobyl, 1986), kecelakaan dibidang penyuplaian tenaga listrik(New York Blackout, 1977), kecelakaan diprose pengolahan(Flixborough, 1974; Seveso 1976; Bhopal, 1984), dan berbagaimasalah lain dimana kecelakaan yang terjadi dapat mengakibatkangangguan terhadap masyarakat dan lingkungann dan mungkinmengakibatkan kematian.
Kejadian –kejadian ini telah meningkatkan tekanan untukmelakukan penilaian keandalan, keselamatan dan semuakemungkinan resiko secara obyektif. Celakanya resiko yang dipahami
3
oleh publik umum seringkali berdasarkan emosi, utamanya dampakyang diakibatkan dari sektor nuklir. Masyarakat umumnya mengalamikesulitan dalam membedakan antara bahaya (hazard), yangdikaitkan dengan gangguan tetapi tidak memperhitungkankemungkinan terjadinya kejadian-kejadian yang membahayakantetapi juga peluang terjdinya kejadian yang membahayakan tersebut.Teknik pengevaluasian keandalan dapat membantu dalam melakukanpenilaian secara obyektif terhadap kemungkinan resiko danmembantu untuk menghitung bukan hanya bahaya yang akan terjaditetapi juga kemungkinannya.
Teknik pengevaluasian keandalan yang moderen juga dipakaididalam aplikasi yang lebih luas termasuk aplikasi domestik, otomobildan berbagai produk lain yang secara individu memiliki dampak sosioekonomik yang kecil. Jika mengalami kegagalan. Kecenderunganterbaru baik dimasyarakat Amerika utara dan Eropa adalahmeningkatnya kebutuhan untuk melakukan penilaian resiko dankeandalan. Kecenderungan-kecenderungan ini berpusat kepadaperubahan hukum-hukum yang berkaitan dengan jaminan produkdimana penyuplai, desainer dan pemroduksi akan dikenai tanggungjawab atas cedera dan kematian konsumen akibat produk yang cacat.Petunjuk-petunjuk juga akan diterbitkan oleh pemerintah dan badan-badan pengatur yang berkaitan dengan kelayakan, keselamatan danresiko, dan yang berkaitan dengan kebutuhan yang penting untukmelakukan penilaian keandalan dan resiko kemungkinan secaraobyektif.
Dari diskusi ini jelas bahwa semua insiyur harus memilikikepedulian terhadap konsep dasar yang berkaitan dengan aplikasiteknik-teknik pengevaluasian keandalan.
4
1.2 Definisi
Secara umum teori keandalan dapat dikelompokan menjadiempat keompok utama, yaitu :• Keandalan komponen dan sistem (Component and system
reliability)• Keandalan struktur (Structural reliability)• Keandalan manusia (Human reliability)• Keandalan perangkat lunak (Software reliability)
Sesuai dengan judul diktat ini, maka didalam diktat ini hanyaakan membahas mengenai keandalan sistem dan komponen.Sebelum melangkah lebih jauh, ada baiknya bila pembacamengetahui beberapa definisi dasar yang berkaitan dengankeandalan sistem dan komponen. Adapun beberapa terminologi dandefinisi yang akan ditampilkan pada seksi ini adalah, keandalan(reliability), ketersediaan (availability), dan kemampurawatan(maintainability).
Keandalan
Didefinisikan sebagai probabilitas dari suatu item untuk dapatmelaksanakan fungsi yang telah ditetapkan, pada kondisipengoperasian dan lingkungan tertentu untuk periode waktu yangtelah ditentukan.
Terminologi item yang dipakai didalam definisi keandalan diatasdapat mewakili sembarang komponen, subsistem, atau sistem yangdapat dianggap sebagai satu kesatuan.
Definisi di atas dapat disarikan menjadi empat komponen pokokyaitu :• probabilitas• kinerja (performance) yang memadai• waktu
5
• kondisi pengoperasianProbabiltas, yang merupakan komponen pokok pertama,
merupakan input numerik bagi pengkajian keandalan sutau sistemyang juga merupakan indeks kuantitatif untuk menilai kelayakansuatu sistem. Pada beberapa kajian yang melibatkan disiplin ilmukeandalan, probabilitas bukan merupakan satu-satunya indeks, adabeberapa indeks lain yang dapat dipakai untuk menilai keandalansuatu sistem yang sedang dikaji.
Tiga komponen lain - yaitu kinerja, waktu dan kondisipengoperasian – semuanya merupakan parameter-parameterengineering dan teori probabilitas tidak banyak membantu untukkajian engineering ini. Seringkali insinyur yang bertanggungjawablangsung terhadap satu sistem tertentu yang cukup akurat untukmemberikan informasi yang cukup memuaskan berkaitan dengankajian sistem yang sedang dilakukan. Waktu yang telah ditetapkanuntuk pengoperasian sistem bisa saja kontinyu atau secara sporadis,sedangkan kondisi pengoperasian bisa kondisi pengoperasian yanguniform atau bervariabel, seperti pada fase pengoperasaian propulsiroket dan pada pengoperasian pesawat terbang komersial pada saattake-off, cruising dan landing.
Kriteria tentang kinerja yang memadai dari sebuah sistemmerupakan masalah yang melibatkan permasalahana manajerial.Kegagalan pengoperasian sistem dapat didefiniskan secara beragammulai dari kegagalan katastropik atau gangguan terhadap fungsisistem, seperti pada pompa yang menyuplai bahan bakar untukmotor penggerak kapal yang mungkin tidak mampu menyuplaikebutuhan minimum bahan bakar meskipun pada kenyataannyapompa bahan bakar tersebut masih bisa beroperasi.
Ketersediaan
Didefinisikan sebagai probabilitas untuk dapat menemukan suatusistem (dengan berbagai kombinasi aspek-aspek keandalannya,
6
kemampu-rawatan dan dukungan perawatan) untuk melakukanfungsi yang diperlukan pada suatu periode waktu tertentu.
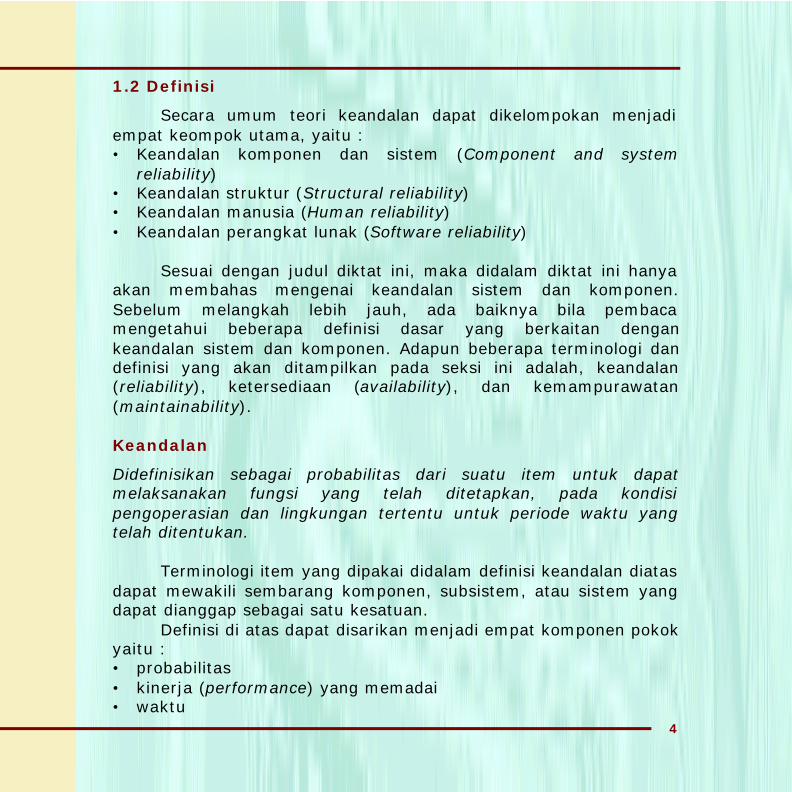
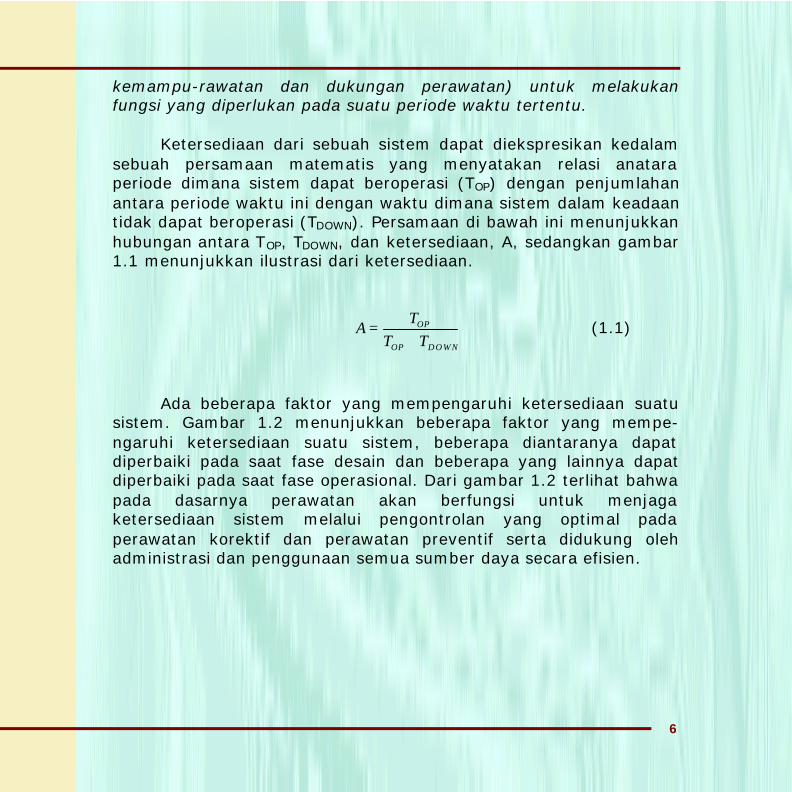
Ketersediaan dari sebuah sistem dapat diekspresikan kedalamsebuah persamaan matematis yang menyatakan relasi anataraperiode dimana sistem dapat beroperasi (TOP) dengan penjumlahanantara periode waktu ini dengan waktu dimana sistem dalam keadaantidak dapat beroperasi (TDOWN). Persamaan di bawah ini menunjukkanhubungan antara TOP, TDOWN, dan ketersediaan, A, sedangkan gambar1.1 menunjukkan ilustrasi dari ketersediaan.
D O W NOP
OP
TT
TA
+= (1.1)
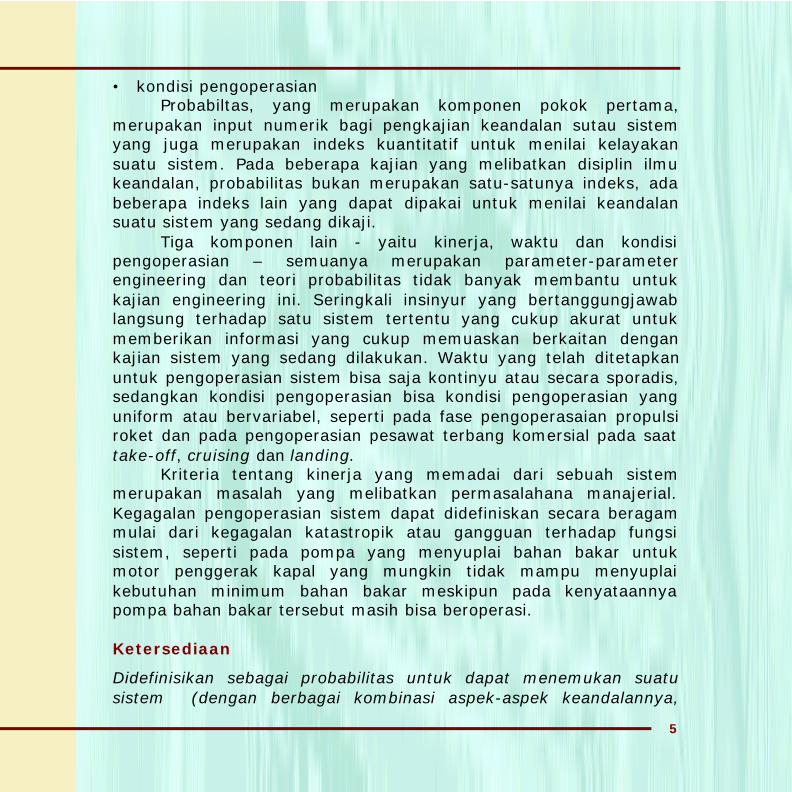
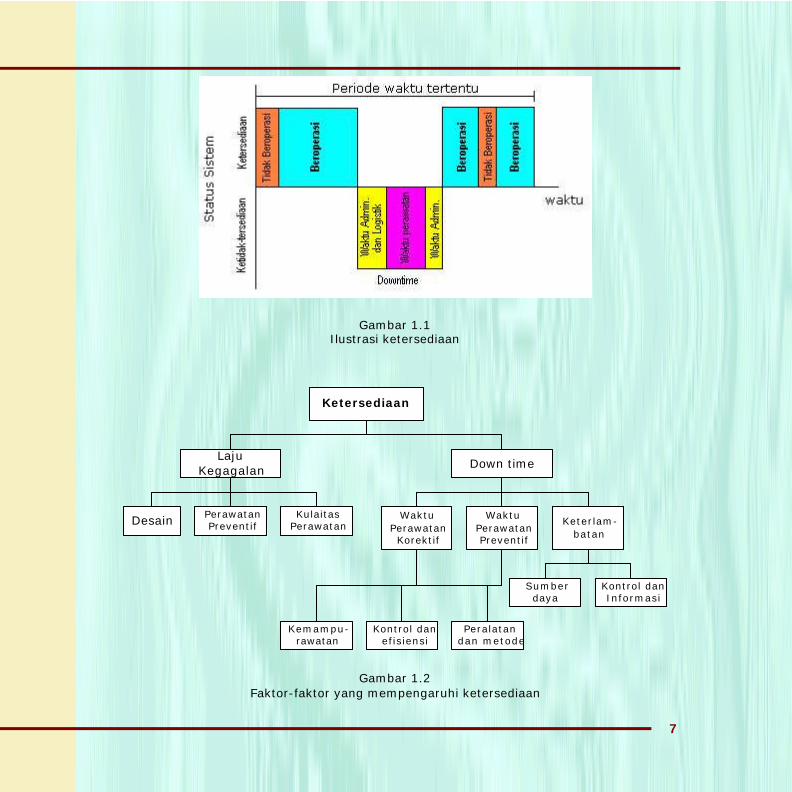
Ada beberapa faktor yang mempengaruhi ketersediaan suatusistem. Gambar 1.2 menunjukkan beberapa faktor yang mempe-ngaruhi ketersediaan suatu sistem, beberapa diantaranya dapatdiperbaiki pada saat fase desain dan beberapa yang lainnya dapatdiperbaiki pada saat fase operasional. Dari gambar 1.2 terlihat bahwapada dasarnya perawatan akan berfungsi untuk menjagaketersediaan sistem melalui pengontrolan yang optimal padaperawatan korektif dan perawatan preventif serta didukung olehadministrasi dan penggunaan semua sumber daya secara efisien.
7
Gambar 1.1Ilustrasi ketersediaan
Ketersediaan
LajuKegagalan Down time
Desain PerawatanPreventif
KulaitasPerawatan
WaktuPerawatanKorektif
WaktuPerawatanPreventif
Keterlam-batan
Sumberdaya
Kontrol danInformasi
Peralatandan metode
Kontrol danefisiensi
Kemampu-rawatan
Gambar 1.2Faktor-faktor yang mempengaruhi ketersediaan
8
Kemampurawatan
Didefinisikan sebagai kemampuan suatu item dalam kondisi pemakiantertentu, untuk dirawat, atau dikembalikan ke keadaan semuladimana item itu dapat menjalankan fungsi yang diperlukan, jikaperawatan dilakukan dalam kondisi tertentu dan denganmenggunakan prosedur dan sumber daya yang sudah ditentukan.
Kemampuarawatan adalah faktor yang penting dalammenentukan ketersediaan dari suatu item. RAM sering kali dipakaisebagai suatu singkatan yang mewakili reliabiliy, availability, danmaintainability.
1.3 Indeks Keandalan
Indeks keaandalan yang paling klasik adalah probabilitasseperti yang didefinisikan di seksi 1.2 Bagaimanapun, indeks yanglain juga dihitung dan dikembangkan secara teratur. Indekskeandalan yang paling cocok sangat tergantung dari sistem dankebutuhan dari sistem tersebut. Contoh-contoh tipikal berikut inimerupakan contoh tipikal dari indeks keandalan selain indeks klasikprobabilitas.§ Jumlah kegagalan yang diharapkan akan terjadi dalam periode
waktu tertentu§ Waktu rata-rata diantara dua kegagalan§ Laju kegagalan dari suatu proses§ Durasi rata-rata downtime dari suatu sistem atau peralatan§ Nilai harapan keuntungan yang hilang karena kegagalan§ Nilai harapan yang hilang dari output suatu proses karena
kegagalan
9
Indeks-indeks ini dapat dievaluasi dengan menggunakan teorikeandalan yang relevan setelah beberapa kriteria tertentu yangberhubungan dengan kondisi operasional dari suatu item dipenuhi.
1.4 Kajian Keandalan
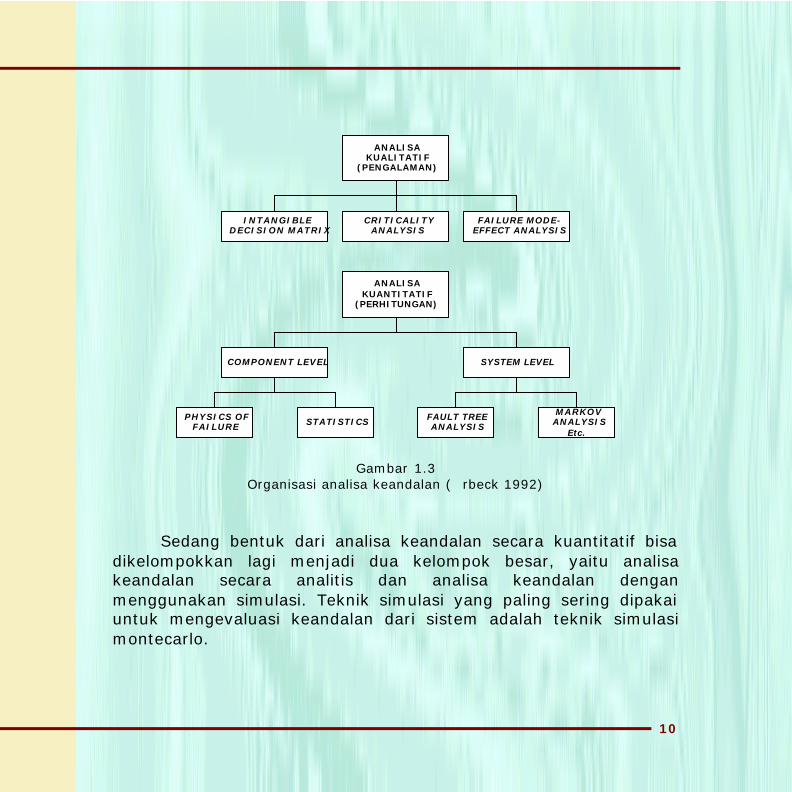
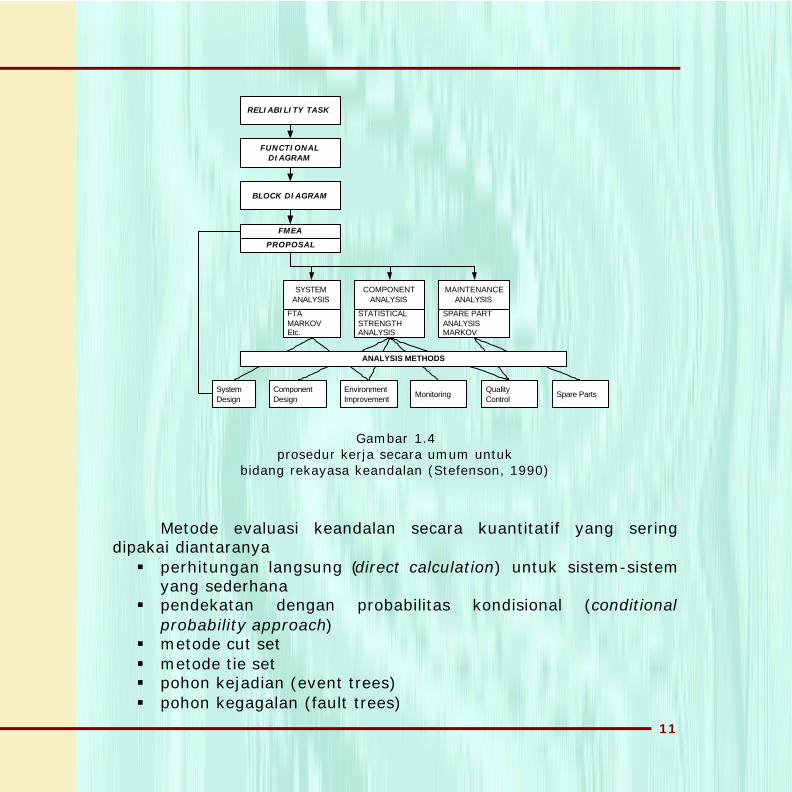
Secara umum ada dua metode yang secara luas dipakai untukmelakukan kajian keandalan terhadap suatu sistem rekayasa. Keduametode analisa ini adalah analisa kualitatif yang berbasis padapengalaman dari personel yang terlibat dalam analisa kualitatif dananalisa kuantitatif dimana perhitungan dan metode yang dipakaisangat memainkan peranan yang sangat penting. Meskipun analisakualittaif dan kuantitatif jelas berbeda, tetapi ada batas yang samarantara kedua analisis tersebut. Sebagai contoh, sebuah intangibledecision matrix dibuat berdasarkan perhitungan, oleh karena itudapat diklasifikasikan ke dalam metode kuantitatif. Tetapi, figur-figuryang dipakai matriks di atas dibuat berdasarakan penilaian kualitatifdan oleh karena itu matrik ini dikategorikan ke dalam kelompokanalisa kualitatif. Gambar 1.3 dan 1.4 masing – masing menunjukkanorganisasi untuk analisa keandalan dan prosedur kerja secara umumbidang rekayasa keandalan (reliability engineering).
Selain berbagai metode analisa keandalan yang sudahditampilkan pada gambara 1.2 dan 1.3, berikut ini beberapa metodeanalisa keandalan lain. Bentuk dari analisa keandalan secara kualitatifini bisa berupa§ analisa mode dan dampak kegagalan (failure mode and effects
analysis - FMEA)§ analisa pohon kegagalan (fault tree analysis - FTA).
10
ANALISAKUALITATIF
(PENGALAMAN)
INTANGIBLEDECISION MATRIX
CRITICALITYANALYSIS
FAILURE MODE-EFFECT ANALYSIS
ANALISAKUANTITATIF
(PERHITUNGAN)
COMPONENT LEVEL SYSTEM LEVEL
PHYSICS OFFAILURE STATISTICS FAULT TREE
ANALYSIS
MARKOVANALYSIS
Etc.
Gambar 1.3Organisasi analisa keandalan (∅rbeck 1992)
Sedang bentuk dari analisa keandalan secara kuantitatif bisadikelompokkan lagi menjadi dua kelompok besar, yaitu analisakeandalan secara analitis dan analisa keandalan denganmenggunakan simulasi. Teknik simulasi yang paling sering dipakaiuntuk mengevaluasi keandalan dari sistem adalah teknik simulasimontecarlo.
11
RELIABILITY TASK
FUNCTIONALDIAGRAM
BLOCK DIAGRAM
FMEA
PROPOSAL
SYSTEMANALYSIS
MAINTENANCEANALYSIS
COMPONENTANALYSIS
FTAMARKOVEtc.
STATISTICALSTRENGTHANALYSIS
SPARE PARTANALYSISMARKOV
SystemDesign
ComponentDesign
EnvironmentImprovement
MonitoringQualityControl
Spare Parts
ANALYSIS METHODS
Gambar 1.4prosedur kerja secara umum untuk
bidang rekayasa keandalan (Stefenson, 1990)
Metode evaluasi keandalan secara kuantitatif yang seringdipakai diantaranya§ perhitungan langsung (direct calculation) untuk sistem-sistem
yang sederhana§ pendekatan dengan probabilitas kondisional (conditional
probability approach)§ metode cut set§ metode tie set§ pohon kejadian (event trees)§ pohon kegagalan (fault trees)
12
§ rantai markov (markov chain)§ proses markov (markov process)
1.5 Aplikasi Keandalan
Tujuan utama dari studi keandalan adalah untuk memberikaninformasi sebagai basis untuk mengambil keputusan. Berkaitandengan itu, teknologi keandalan mempunyai potensi untuk dipakaidalam ruang yang sangat luas. Adapun area yang memanfaatkanteknologi keandalan diantaranya adalah sebagai berikut.
Analisa resiko/keselamatan (Safety/risk analyses)
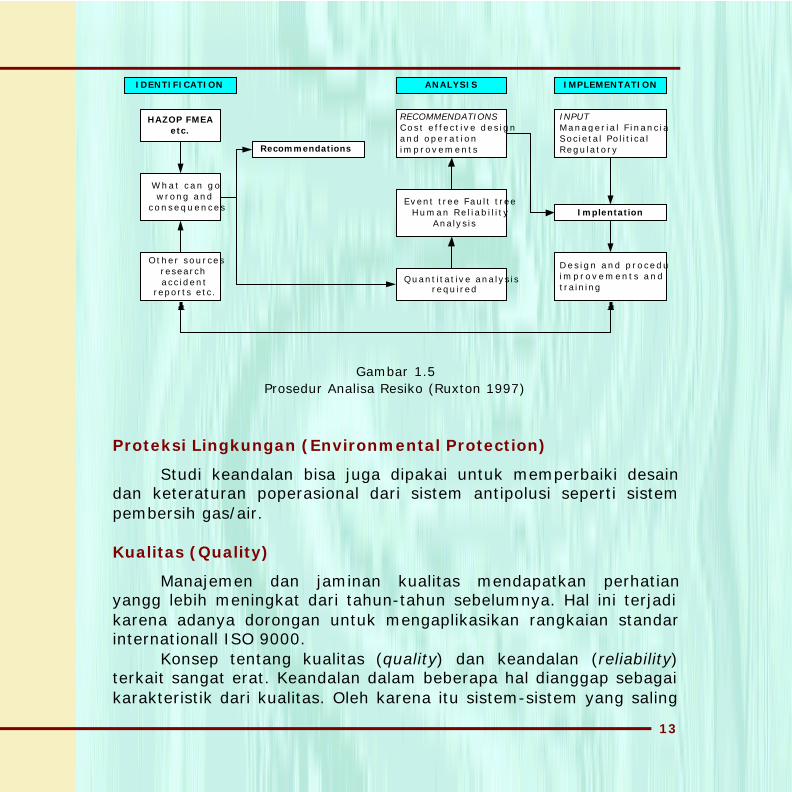
Analisa keandalan adalah merupakan bagian yang sudah sangatmantap dari hampir sebagian besar untuk studi-studi resiko dankeselamatan. Bagian dari analisa resiko (risk analysis) umumnyadilakukan dengan menerapkan teknik keandalan seperti analisamodus dan dampak kegagalan (Failure Mode and Effects Analysis-FMEA) dan analisa pohon kegagalan (Fault tree analysis). Sedangkanmetode lain yang juga digunakan untuk menganalisa resiko antaralain Criticality Analysis, Hazards and Operability (HAZOP) Studies,dan Cause-Consequence Analysis. Gambar 1.5 menunjukkandiagaram analisa resiko secara umum.
13
HAZOP FMEAetc.
Recommendations
What can gowrong and
consequences
Other sourcesresearchaccident
reports etc.
IDENTIFICATION
RECOMMENDATIONSCost ef fect ive des ignand operat ionimprovements
Quantitat ive analysisrequired
Event tree Fault treeHuman Rel iab i l i ty
Analysis
ANALYSIS IMPLEMENTATION
INPUTManager ia l F inancia lSocietal Pol it icalRegulatory
Implentation
Des ign and procedura limprovements andtraining
Gambar 1.5Prosedur Analisa Resiko (Ruxton 1997)
Proteksi Lingkungan (Environmental Protection)
Studi keandalan bisa juga dipakai untuk memperbaiki desaindan keteraturan poperasional dari sistem antipolusi seperti sistempembersih gas/air.
Kualitas (Quality)
Manajemen dan jaminan kualitas mendapatkan perhatianyangg lebih meningkat dari tahun-tahun sebelumnya. Hal ini terjadikarena adanya dorongan untuk mengaplikasikan rangkaian standarinternationall ISO 9000.
Konsep tentang kualitas (quality) dan keandalan (reliability)terkait sangat erat. Keandalan dalam beberapa hal dianggap sebagaikarakteristik dari kualitas. Oleh karena itu sistem-sistem yang saling
14
melengkapi dari suatu sistem yang besar yang akan dilengkapidengan manajemenkeandalan dan jaminan kualitas merupakanbagian dari manajemen kualitas secara total (Total QualityManagement-TQM)
Optimasi operasi dan perawatan (Optimization of maintenanceand operation)
Perawatan dilakukan untuk mencegah kegagalan sistemmaupun untuk mengembalikan fungsi sistem jika kegagalan telahterjadi. Jadi tujuan utama dari perawatan adalah untuk menjaga danmemperbaiki keandalan dari sistem dan kelancaran produksi/operasi.
Beberapa industri telah menyadari betapa pentingnyahubungan antara keandalan dan perawatan dan telahmengimplementasikan perawatan yang berbasiskan pada keandalanatau yang lebih dikenal dengan RCM (Reliability-CenteredMaintenance). Metodologi RCM bertujuan untuk memperbaiki cost-effectiveness dan mengontrol perawatan pada berbagai jenis industri,oleh karena itu RCM akan dapat memperbaiki ketersediaan dankeselamatan. Kajian keandalan juga merupakan elemen penting padaberbagai aplikasi berikut ini : Life Cycle Cost (LCC) analisis, Life CycleProfit (LCP) analysis, pengalokasi dukungan logistik, pengalokasiansuku cadang dan analisa untuk menentukan level operator.
Desain rekayasa (Engineering design)
Keandalan merupakan salah satu karakteristik kualitas darisuatu produk teknik. Oleh karena itu jaminan keandalan merupakansalah satu topik yang paling penting selama proses pendesaian suatuproduk
15
1.6 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
3. ∅rbeck, F. [1992], “Implementation of Reliability Methodology toShip’s Machinery”, Transaction IMarE, Vol 103
4. Ruxton, T. [1997], “Formal Safety Assessment”, TransactionIMarE, Part 4.
5. Stefenson, Prof. J.[1990], “Design Procedures for The Reliability ofIntegrated Marine Systems”, paper 5 ICMES
6. …….[1994], Training Course in Reliability-Centered Maintenance,MARINTEK-SINTEF Group.
KEMBALI KE DAFTAR ISI MODUL 1
16
Probabilitas
2.1 Pendahuluan
Kata probabiliitas sering dipakai jika kehilangan sentuhandalam mengimplikasikan bahwa suatu kejadian yang mempunyaipeluang yang bagus akan terjadi. Dalam hal ini penilaian yangdilakukan ini adalah ukuran yang bersifat subyektif atau kualitatif.Adalah penting untuk menyadari bahwa probabilitas mempunyai artisecara teknis karena secara ilmiah probabilitas dapat ditafsirkansebagai ukuran dari kemungkinan, yaitu mendefinisikan secarakuantatif kemungkinan dari suatu event atau kejadian secaramatematis. Probabilitas merupakan suatu indeks numerik yangnilainya antara 0 dan 1. Indeks numerik 0 akan mendefinisikansuaatu kejadian yang pasti tidak akan terjadi, sedang indeks numerik1 akan mendefinisikan suatu kejadian yang pasti terjadi.
Dari pengertian tentang konsep probabilitas diatas jelas terlihatbahwa sangat sedikit sekali kejadian yang mempunyai nilaiprobabilitas 0 atau 1. Yang ada adalah hampir semua kejadianmempunyai nilai probabilitas antara 0 dan 1. Untuk keperluan teorikeandalan, nilai probabilitas secara garis besar dapat dikelompokan
17
menjadi dua keluaran yaitu keluaran yang mewaakiliii kejadian yangdidefinisikan sebagai kejadian yang sukses, sedang keluaran yanglainnya mewakilii kejadian yang didefinisikan sebagai kejadian yanggagal. Bila ada lebih dari dua keluaran yang mungkin dari suatuuevent atau kejadian, maka keluaran itu dapat dikelompokan menjadikelompok keluaran yang mewaakili kejadian yang sukses sedangsisanya bisa dikelompokan sebagai kejadian yang gagal.
Bila suatu eksperimen akan menghasilkan berbagaikemungkinan keluaran maka semua keluaran yang mungkinn darieksperimen tersebut disebut sebagai ruang sampel (sample space).Jika semua keluaran dari eksperimen ini bisa dikelompokan menjadidua yaituu kelompok keluaran atau kejadian yang didefinisikansebagai kejadian sukses, sedanng kelompok lainnya adalahkelompok yang didefinisikan sebagai kelompok kejadian gagal makasecara umum probilitas sukses dan gagal dari kejadian diatas dapatdidefinisikan sebagai.
fss
psuksesP+
==)( (2.1)
fsf
qgagalP+
==)( (2.2)
Dimana :P = banyaknya cara kejadian sukses yang dapat terjadiq = banyaknya cara kejadian kegagalan yang dapat terjadi
contoh 2.1
Pada eksperimen pelemparan tiga buah mata uang logam sebanyaktiga kali maka ruang sampel dari eksperimen itu adalah
18
S = { KKK, KKE, KEK, EKK, KEE, EKE, EEK, EEE }
Dengan K adalah bagian atas dan E adalah bagian belakang dari matauang logam tersebut. Jika didefinisikan kejadian yang menghasilkanketiga bagian atas dari mata uang logam itu sebagaii kejadian suksesmaka probabilitas sukses dari eksperimen itu adalah
81
)( =suksesP q
2.2 Permutasi
Sebuah susunan dari n buah obyek dalam urutan tertentudisebut permutasi dari obyek. Susunan dari sembarang r dari n obyekdengan r ≤ n disebut permutasi r atau permutasi r obyek dari n obyekdan dinotasikan sebagai P(n,r) atau nPr. Secara umum permutasi robyek dari n obyek dan dirumuskan oleh
)!(!rn
nrPn −
= (2.3)
Dengan
n! = n.(n -1).(n -2)……..1
0! = 1
Contoh 2.2
Dari 10 buah persediaan pompa yang ada di gudang, 4 diantaranyaakan diistal pada empat buah subsistem yang berbeda. Ada beberapacara untuk memilih 4 buah pompa ini dari 10 bbuah pompa yang ada.
19
SolusiPermasalahan ini dapat diselesaikan dengan menggunkan konseppermutasi, mengingat penempatan pompa pada subsistem tertentuidentik dengan memberikan urutan tertentu pada pompa yang akandipasang.
cara 5040)!410(
610410 =
−=P q
Dari n obyek yang mengalami permutai mungkin ada r obyekdiantaranya yang sama, sehingga r1 + r2 + ………+ rk = n. Untukmenghitung banyaknya permutasi dari kasus ini, rumus yangdituliskan pada persamaan 2.3 akan berubah menjadi
!!....2!1
!
krrrn
rPn = (2.4)
Contoh 2.3
Beberapa patern yang berbeda yang dapat dibuat dalam sebuah barisbila ada 10 buah lampu berwarna yang 4 diantaranya berwarnamerah, 3 diantaranya berwaarna kuning dan 3 diantaranya berwarnahijau.
Jawab
4200!3!3!4
!10 ==P patern q
20
2.3 Kombinasi
Jumlah kombinasi dari n obyek yang berbeda adalah jumlahpilihan yang berlainan dari r obyek, masing-masing tanpamemandang urutan dari susunan dari obyek didalam kelompoktersebut. Hal inilah yang membedakan antara permutasi dankombinasi. Jumlah kombinasi r obyek dari n obyek dinotasikan oleh
rn C atau ( )nr . Secara umum kombinasi r obyek dari n obyek dapat
diekspresikan ke dalam formula
( )!)!(
!rrn
nrCn
nr −
== (2.5)
Contoh 2.4
Sebuah sub sistem mempunyai dua buah modul yang identik. Keduamodul ini didesain untuk bekerja secara bergiiran atau standby. Bilaada 4 buah modul yang tersedia, ada beberapa cara untuk memilihkedua modul untuk diinstal kedalam sub sistem tersebut.
Solusi
Untuk menginstal kedua modul ini, bisa dipilih dua modul diantaraempat buah modul yang tersedia tanpa memperhatikan urutanpenempatan modul itu didalam sub sistem karena modul yangdiinstal adalah identik. Banyaknya cara untuk memilih modul bisadipecahkan dengan menggunakan formula kombinasi yaitu
( ) 6!2)!24(
!442 =
−= cara q
21
2.4 Pemakaian Permutasi dan Kombinasi Untuk PerhitunganProbabilitasDalam aplikasi teori keandalan secara praktis, konsep
kombinasi umumnya lebih penting dari permutasi, karena umumnyaperlu untuk mengetahui event-event apa yang bila dikombinasikanakan menyebabkan kegagalan dari suatu sistem, dan urutanbagaimana kegagalan itu terjadi jarang yang peduli.
Berikut ini akan diberikan beberapa contoh pemakaianpermutasi dan kombinasi dalam perhitungan probabilitas
Contoh 2.5
Empat buah bola lampu dipilih secara random dari 10 buah lampuyang ada dimana 3 diantaranya adalah bola lampu yang rusak.Hitung probabilitas dari pengambilan keempat bola lampu itu juga.a) Keempat bola lampu yang diambil tidak ada yang cacatb) Ada satu bola lampu yang cacatc) Paling sedikit ada satu buah bola lampu yang cacat.
Solusi
Banyaknya cara untuk memilih 4 bola lampu dari 10 buah lampu ada
210!4)!410(
!10104 =
−=
cara
a) Ada 7 buah lampu yang tidak mengalami kerusakan. Jadibanyaknya cara untukk memilih 4 buah lampu tanpa ada rusakada
35!4)!47(
!774 =
−=
cara

22
P(4 bola lampu baik) =61
21035
= q
b) Dari data, ada 3 buah bola lampu yang cacat dan
( ) 35!3)!37(
!773 =
−= cara untuk memilih 3 buah lampu yang tidak
cacat dari 7 buah bola lampu yang tidak cacat, sehinggabanyaknya cara untuk memilih empat buah bola lampu dimanasatu diantaranya adalah bola lampu yang cacat adalah 3x35 = 105cara.
P(1 bola lampu cacat dan 3 bola lampu baik) = 21
210105
= q
c) Kejadian yang mewakili pengambilan empat buah lampu palingsedikit ada satu buah lampu yang cacat merupakan komplemendari kejadian yang mewakili pengambilan empat buah bola lamputanpa cacat, sehingga probabilitas kejadian ini adalah
P(minimal 1 bola lampu cacat) = 1 - 65
61 = q
Contoh 2.6
Jika tiga buah kartu diambi secara acak dari saatu set kartu yanglengkap, hitung probabilitasa) Ketiga kartu itu adalah kartu yang bergambar hatib) Dua kartu bergambar hati dan satu bergambar diamond
23
Solusi
Banyaknya cara untuk memilih 3 buah kartu dari 52 buah kartu ada
22100!3)!352(
!52352 =
−=
cara
a) Banyaknya cara untuk mengambil 3 buah kartu yang bergambarhati dari 13 buah kartu yang bergambar hati ada
286!3)!313(
!13133 =
−=
cara
P( 3 kartu bergambar hati ) = 85011
22100286
= q
b) Banyaknya cara untuk mengambil satu kartu yang bergambardiamond ada 13 cara sedang banyaknya cara untuk mengambil 2
kartu yang bergambar hati ada 78)!213(
!13132 =
−=
cara.
Sehingga banyaknya cara untuk mengambil tiga buah kartudimana satu kartu bergambar diamond dan dua lainnyabergambar hati ada 13 x 78 = 1014 cara.
P(1 kartu diamond dan 2 kartu hati) = 85039
221001014
= q
2.5.Hukum untuk Menggabungkan Probabilitas
Kejadian bebas (Independent events)
Dua buah kejadian dikatakan bebas jika hasil dari satu eventtidak mempengaruhi hasil dari event yang lain.
Contoh dari kejadian bebas ini adalah bila kita melemparkansebuah dadu dan dan sebuah koin secara bersama-sama. Apapun
24
hasil keluaran yang dihasilkan oleh dadu tidak akan mempengaruhihasil keluaran koin.
Kejadian gabungan eksklusif (Mutually exclusive events)
Dua keadian dikatakan tergabung secara eksklusif bila duakejadian tersebut tidak dapat terjadi secara bersama-sama.
Contoh dari kejadian gabungan ekslusif ini adalah bila kitamelempar sebuah koin, keluaran yang mungkin adalah bagian atasatau bagian bawah dari uang logam itu, tetapi keduanya tidakmungkin terjadi secara bersama-sama. Contoh lainnya adalah bilakita melempar sebuah dadu, maka mata dadu yang keluar mungkinmata 1, 2, 3, 4, 5, atau 6, tetapi keenam mata dadu ini tidakmungkin keluar secara bersamaan.
Kejadian komplementer (Complementary events)
Dua kejadian dikatakan saling berkomplemen bila salah satudari kejadian itu tidak terjadi maka kejadian yang lainnya pastiterjadi. Kejadian ini bisa dilukiskan dalam bentuk diagram vennseperti yang terlihat pada gambar 2.1. Dari gambar 2.1, bila P(A)mewakili probabilitas dari kejadian A dan P(B) mewakili probabilitasdari kejadian B maka hubungan antara P(A) dan P(B) dapatdiekspresikan dalam sebuah formula yaitu
1)()( =+ BPAP (2.6)
25
Gambar 2.1Kejadian komplementer
Contoh dari kejadian komplementer ini adalah bila kitamelempar sebuah mata uang logam, hanya ada dua kemungkinankeluaran yaitu bagian depan dan bagian belakang dari mata uangtersebut.
Kejadian kondisional (Conditional events)
Kejadian kondisional adalah kejadian yang kondisi terjadinyatergantung dari kejadian lain.
Misalkan ada dua kejadian A dan B. Probabilitas dari kejadian Aadalah diekspresikan dengan P(A) dan probabilitas dari kejadian Bdiekspresikan dengan P(B), selain itu misalkan pula ada kejadian dariA setelah kondisi B terjadi. Probabilitas dari kejadian ini dapatdinotasikan dengan ekspresi P(AB). Ekspresi P(AB) dapat dibacasebagai probabilitas kondisional kejadian A akan terjadi pada saatkejadian B telah terjadi. Secara matematis probabilitas kondisional inidapat diekspresikan sebagai
)()(
)(BP
BAPBAP
∩= (2.7)
26
persamaan 2.7 dapat pula diubah menjadi
)()(
)(AP
BAPABP
∩= (2.8)
Contoh 2.7
Dari data perawatan peralatan-peralatan yang berada di dalam suatusistem pembangkit tenaga listrik, 25% kerusakan yang terjadidisebabkan karena kerusakan mekanik, 15% kerusakan yang terjadidisebabkan oleh kerusakan elektrik, dan 10% kerusakan yang terjadidisebabkan karena kerusakan mekanik dan elektrik. Bila sebuahperalatan dipilih secara random tentukana. probabilitas kerusakan peralatan itu disebabkan oleh kerusakan
elektrik setelah sebelumnya terjadi kerusakan mekanik.b. probabilitas kerusakan peralatan itu disebabkan oleh kerusakan
mekanik setelah sebelumnya terjadi kerusakan elektrik.
SolusiMisalkan,
M = kejadian yang mewakili kerusakan peralatan yangdisebabkan oleh kerusakan mekanik.
P(M) = 0,25 E = kejadian yang mewakili kerusakan peralatan yang
disebabkan oleh kerusakan elektrik.P(E) = 0,15, dan P(M ∩ E) = 0,10.
a. 4,025,010,0
)()(
)( ==∩=MP
MEPMEP
27
b. 667,015,010,0
)()(
)( ==∩=EP
MEPEMP q
Kejadian yang terjadi secara serentak(Simultaneous occurrence of events)
Kejadian secara serentak dari dua kejadian A dan B adalahkejadian untuk kedua A DAN B.
Secara matematis kejadian ini dapat dituliskan sebagai (A ∩ B)atau (A DAN B) atau (AB). Ada dua kasus untuk kejadian yang terjadisecara serentak ini yaitu bila kedua kejadian ini saling bebas(independent events) dan bila kedua kejadian ini tidak saling bebas(dependent events).
Independent events
Untuk independent events probabilitas dari masing-masing kejadian tidak saling mempengaruhi sehingga untukkasus ini akan berlaku P(A B) = P(A) dan P(B A) = P(B).Secara matematis probabilitas kejadian secara serentak untukdua kejadian yang saling bebas dapat diekspresikan sebagai
)().()( BPAPBAP =∩ (2.9)
Sedangkan bila ada n buah kejadian yang independent,probabilitas kejadian dari n buah kejadian yang independentyang terjdai secara serentak dapat diekspresikan sebagai
)( ... )()() ... ( 2121 nn APAPAPAAAP =∩∩∩ (2.10)
28
Contoh 2.8
Seorang insinyur akan memilih dua buah modul sistem kontrol.Probabilitas modul A tidak cacat adalah 0,95 dan probabilitas modul Btidak cacat adalah 0,87. Probabilitas dari kedua modul itu untuk tidakcacat dapat dihitung sebagai
P( A tidak cacat ∩ B tidak cacat)= P(A tidak cacat) x P(B tidak cacat)= 0,95 x 0,87 = 0,8265 q
Dependent events
Jika dua kejadian tidak saling bebas, maka probabilitasdari kejadian satu event akan dipengaruhi oleh kejadianlainnya. Dalam kasus ini, persamaan 2.9 akan berubah menjadi
)().()().()( APABPBPBAPBAP ==∩ (2.11)
Minimal satu kejadian dari dua kejadian
Kejadian paling sedikit satu dari dua kejadian A dan B adalahkejadian dari A atau kejadian dari B atau kedua-duanya.
Secara matematis kejadian ini dapat dituliskan sebagai (A ∪ B)atau (A ATAU B) atau (A + B). Ada tiga kasus untuk kejadian sepertiini yaitu pertama bila kedua kejadian ini saling bebas (independentevents) tetapi tidak tergabung secara eksklusif (not mutuallyexclusive), kedua bila kedua kejadian ini saling bebas (independentevents) dan tergabung secara eksklusif (mutually exclusive) dan yangketiga bila kedua kejadian ini tidak saling bebas (dependent events).
Secara umum ekspresi probabilitas untuk minimal satu kejadiandari dua kejadian adalah
29
)()()()( BAPBPAPBAP ∩−+=∪ (2.12)
Kejadian independent tetapi tidak mutually exclusive
Untuk kejadian independent tetapi tidak mutuallyexclusive nilai dari P(A ∩ B) dapat diekspresikan dalam P(A ∩B) = P(A).P(B), sehingga persamaan 2.12 dapat diubahmenjadi
)()()()()( BPAPBPAPBAP −+=∪ (2.13)
Kejadian independent dan mutually exclusive
Untuk kejadian independent dan mutually exclusive nilaidari P(A ∩ B) dapat diekspresikan dalam P(A ∩ B) = 0,sehingga persamaan 2.12 dapat diubah menjadi
)()()( BPAPBAP +=∪ (2.14)
Kejadian tidak saling bebas
Untuk kejadaian tidak saling bebas nilai dari P(A ∩ B) dapatdiekspresikan dalam P(A ∩ B) = P(B|A).P(A) = P(A|B).P(B), sehinggapersamaan 2.12 dapat diubah menjadi
)()()()()( BPBAPBPAPBAP −+=∪ (2.15a)
)()()()()( APABPBPAPBAP −+=∪ (2.15b)
30
Aplikasi dari probabilitas kondisional
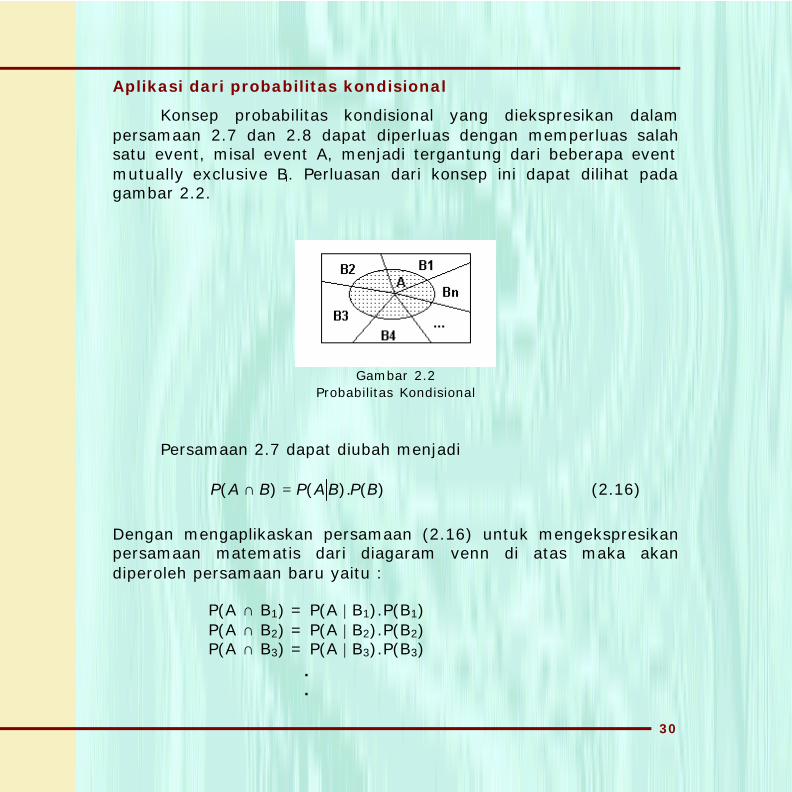
Konsep probabilitas kondisional yang diekspresikan dalampersamaan 2.7 dan 2.8 dapat diperluas dengan memperluas salahsatu event, misal event A, menjadi tergantung dari beberapa eventmutually exclusive Bi. Perluasan dari konsep ini dapat dilihat padagambar 2.2.
Gambar 2.2Probabilitas Kondisional
Persamaan 2.7 dapat diubah menjadi
)().()( BPBAPBAP =∩ (2.16)
Dengan mengaplikaskan persamaan (2.16) untuk mengekspresikanpersamaan matematis dari diagaram venn di atas maka akandiperoleh persamaan baru yaitu :
P(A ∩ B1) = P(A | B1).P(B1)P(A ∩ B2) = P(A | B2).P(B2)P(A ∩ B3) = P(A | B3).P(B3)
.
.
31
.P(A ∩ Bi) = P(A | Bi).P(Bi)
.
.
.P(A ∩ Bn) = P(A | Bn).P(Bn)
Dan jika digabungkan bersama-sama akan diperoleh persamaan baru
)()()(11
ii
n
ii
n
i
BPBAPBAP ∑∑==
=∩ (2.17)
Ruas kiri dari persamaan 2.17 dapat disederhanakan menjadi P(A),dan persamaan 2.17 dapat disederhanakan lagi menjadi
)()()(11
ii
n
i
n
i
BPBAPAP ∑∑==
= (2.18)
Contoh 2.9
Tiga buah mesin A,B, dan C masing-masing menghasilkan produk40%, 35%, dan 25% dari total produk yang dihasilkan oleh pabriktersebut. Persentase dari barang-barang yang cacat yang dihasilkanoleh masing-masing mesin ini adalah 2%, 3% dan 4%. Jika sebuahproduk diambil secara random, tetntukan probabilitas bahwa produkyang diambil itu adalah produk yang cacat.
SolusiJika
32
Y = Kejadian yang mewakili sebuah item yang cacatA = Kejadian yang mewakili sebuah item diproduksi oleh mesin AB = Kejadian yang mewakili sebuah item diproduksi oleh mesin BC = Kejadian yang mewakili sebuah item diproduksi oleh mesin CmakaP(Y) = P(A)P(Y |A) + P(B)P(Y |B) + P(C)P(Y |C)
= (0,4)(0,02) + (0,35)(0,03) + (0,25)(0,04)= 0,008 + 0,0105 + 0,0100= 0,0285
Contoh 2.10
Sebuah produk diproduksi dari dua plant. Plant pertamamenghasilkan 60% dari seluruh produk sedang sisanya yang 40%diproduksi oleh plant 2. Dari plant 1, 95% produk diantaranyamemenuhi standard yang disyaratkan sedang dari plant 2, 90%produk yang dihasilkan memenuhi standard yang ditentukan.Tentukan :
a. Dari 100 produk yang dibeli oleh konsumen berapa buahyang akan memenuhi standard.
b. Jika diberikan sebuah produk yang standar, berapaprobabilitas bahwa produk itu di hasilkan oleh plant 2.
SolusiJikaA = Kejadian yang mewakili produk yang standarB1 = Kejadian yang mewakili produk yang dihasilkan oleh plant 1
33
B2 = Kejadian yang mewakili produk yang dihasilkan oleh plant 2maka
P(A|B1) = 0,95, P(A|B2) = 0,90, P(B1) = 0,6, dan P(B2) = 0,4.
a. P(A) = P(A|B1)P(B1) + P(A|B2)P(B2) = (0,95)(0,6) + (0,90)(0,4) = 0,93
Dari 100 item yang dibeli oleh konsumen, 0,93 x 100 = 93diantaranya akan memenuhi standar.
b. Pertanyaan ini dapat diselesaikan dengan persamaan
)()(
)( 22 AP
BAPABP
∩= , dimana q
P(A ∩ B2) = P(B2).P(A|B2) = (0,4)(0,90) = 0,36 dan P(A) = 0,93sehingga,
387,093,036,0
)( 2 ==ABP q
Persamaan 2.18 dapat dipakai untuk evaluasi keandalan darisuatu sistem yang mempunyai blok diagram yang sangat komplek.Untuk keperluan ini, misalkan sebuah kejadian A hanya bergantungdari kejadian B yang memiliki dua kejadian yang mutually exclusiveyaitu Bs dab Bf yang masing-masing mewakili kejadian dari komponenB dalam keadaan baik dan dalam keadaan buruk. Persamaan 2.18dapat ditulis menjadi
)()()()()( ffSS BPBAPBPBAPAP += (2.19)
34
Khusus untuk keperluan pengevaluasian keandalan dari suatusistem, tujuan dari pengevaluasian adalah untuk mengevaluasiprobabilitas kesuksesan atau probabilitas kegagalan dari suatusistem, sehingga untuk keperluan ini, persamaan (2.19 ) dapatdimodifikasi menjadi
)jelek)P(B kondisi Bdalam jika sukses P(sistem
)baik)P(B kondisi Bdalam jika sukses P(sistemsukses) P(sistem
f
S +=
(2.20)
Sedangkan probabilitas dari kejadian komplemennya adalah
)()jelek kondisi Bdalam jika gagal sistem(
)()baik kondisi Bdalam jika gagal sistem()gagal sistem(
f
S
BPP
BPPP +=
(2.21)
Contoh 2.11
Sebuah subsistem terdiri dari dua komponen yaitu komponen A dankomponen B. Agar subsistem ini sukses menjalankan misinya, keduakomponen ini harus bekerja dengan baik. Dengan menggunakanpersamaan 2.20, dapatkan probabilitas untuk sukses dari subsistemtersebut.
SolusiMisalkan,RA = Probabilitas kesuksesan dari komponen A untuk dapat
menjalankan misinya.QA = Probabilitas kegagalan dari komponen A untuk dapat
menjalankan misinya.
35
dan RA + QA = 1RB = Probabilitas kesuksesan dari komponen B untuk dapat
menjalankan misinya.QB = Probabilitas kegagalan dari komponen B untuk dapat
menjalankan misinya.dan RB + QB = 1
Maka,P(sistem sukses) = P(Sistem sukses | komponen B bagus).P(B
bagus) + P(sistem gagal | komponen Bjelek).P(B jelek)
= (RA x RB ) + (0 x QB) = RA x RB
Contoh di atas merupakan sebuah contoh untuk sistem yangmempunyai susunan seri, dimana kedua komponen harus bekerjadengan baik agar sistem dengan susunan seri dapat sukses dalammenjalankan misinya.
q
Contoh 2.12
Dari data perawatan peralatan-peralatan yang berada didalam suausistem pembangkit tenaga listrik, 25 % kerusakan yang terjadidisebabkan karena mekanik, 15 % kerusakan yang terjadidisebabkan karena elektrik, dan 10% kerusakan yang terjadidisebabkan karena kerusakan mekanik dan elektrik. Bila sebuahperalatan dipilih random tentukana. Probabilitas kerusakan peralatan itu disebabkan oleh kerusakan
elektrik setelah sebelum nya terjadi kerusakan mekanik.b. Probabilitas kerusakan peralatan itu disebabkan oleh kerusakan
mekanik setelah sebelumnya terjadi kerusakan elektrik
36
Solusi
Misalkan
M = Kejadian yang mewakili kerusakan peralatan yangdisebabkan oleh kerusakan mekanik.
P(M) = 0,25
E = kejadian yang mewakili kerusakan peralatan yangdisebabkan oleh kerusakan elektrik.
P(E) = 0,15 dan .10,0)( =∩ EMP
a. 4,025,010,0
)()(
)|( ==∩=MP
MEPMEP q
b. 667,015,010,0
)()(
)( ==∩
=EP
MEPEMP q
2.6 Teorema Binomial
Pangkat n dari bentuk (p+q) dapat diekspresikan dalam suku-suku koefisien binomial seperti pada persamaan di bawah ini
∑=
−
−−−
=++
−++
−++=+
n
r
rrnrn
rrnnnnn
qpC
qprnr
nqp
nnqnppqp
0
n
221
q...
)!!(!
...!2
)1()(
(2.22)
Jika p dan q masing – masing menyatakan probabilitas dari suatuevent, maka persamaan (2.22) akan menyatakan persamaan
37
distribusi binomial bila beberapa syarat berikut ini dapat dipenuhi.Syarat – syarat yang harus dipenuhi adalah :
§ Jumlah trial harus tetap, atau n harus diketahui.§ Masing-masing trial harus menghasilkan event sukses atau
event gagal, atau dengan kata lain hanya ada dua keluaranyang mungkin dan p + q = 1.
§ Semua trial harus memiliki probabilitas sukses yang identik,dengan demikian trial harus memiliki probabilitas kegagalanyang identik pula, atau nilai dari p dan q tetap konstan.
§ Semua trial harus independen.
38
2.7 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. Frankel, Ernst G., [1988], Systems Reliability and Risk Analysis,2nd edition, Kluwer Academic Publishers, PO BOX 17, 3300 AADordrecht, The Netherlands.
3. Ramakumar, R [1993]., Engineering Reliability : Fundamentalsand Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 1
39
Pemodelan JaringanDan Evaluasi Sistem
3.1 Pendahuluan
Untuk meegevaluasi keandalan dari suatu komponen atausistem yang pertama kali harus dilakukan adalah denganmemodelkan komponen atau sistem tersebut kedalam diagram blokkeandalan (reliabiliy block diagram). Dari diagram blok keandalan inikemudian dihitung keandalan dari komponen atau sistem yangbersangkutan. Hal ini sangat mungkin dilakukan untuk sistem yangsederhana. Untuk sistem yang lebih kompleks, evalusi keandalandapat dilakukan dengan memakai teknik lain seperti pendekatanprobabilitas kondisional (conditiional probabilistic approach),himpunan pemotong (cut set), himpunan pengumpul (tie set) danpendekatan-pendekatan probabilistik lain.
Dalam mengevaluasi keandalan dari sistem, indeks keandalandari masing-masing komponen yang ada didalam sistem yang akandievaluasi dapat diekspresikan dengan nilai yang konstan untukdidurasi waktu tertentu. Cara mengevaluasi keandalan sistem sepertiini dikategorikan sebagai evaluasi model keandalan statis.
40
Evaluasi keandalan dari suatu sistem dengan memakai modelstatis biasanya dilakukan pada analisa pendahuluan untuk mendesainsuatu sistem. Model stastis dipakai untuk mengeveluasi berbagaikemungkinan desain dan dipakai untuk menentukan level keandalanyang diperlukan baik untuk subsistem dan komponen yang adadidalam sistem.
Untuk membuat blok diagram keandalan dari suatu sistem,antara bentuk fisik sistem dan model blok diagram keandalan darisistem tidak harus selalu sama. Blok diagram keandalan dari sistemakan sangat tergantung dari kepiawaian sang analisis dalammemahami cara kerja suatu sistem dan menerjemahkannya kedalamblok diagram keandalan. Susunan diagram blok keandalan ini untuksistem yang sederhana pada dasarnya terdiri dari susunan seri danparalel atau kombinasi susunan seri dan paralel.
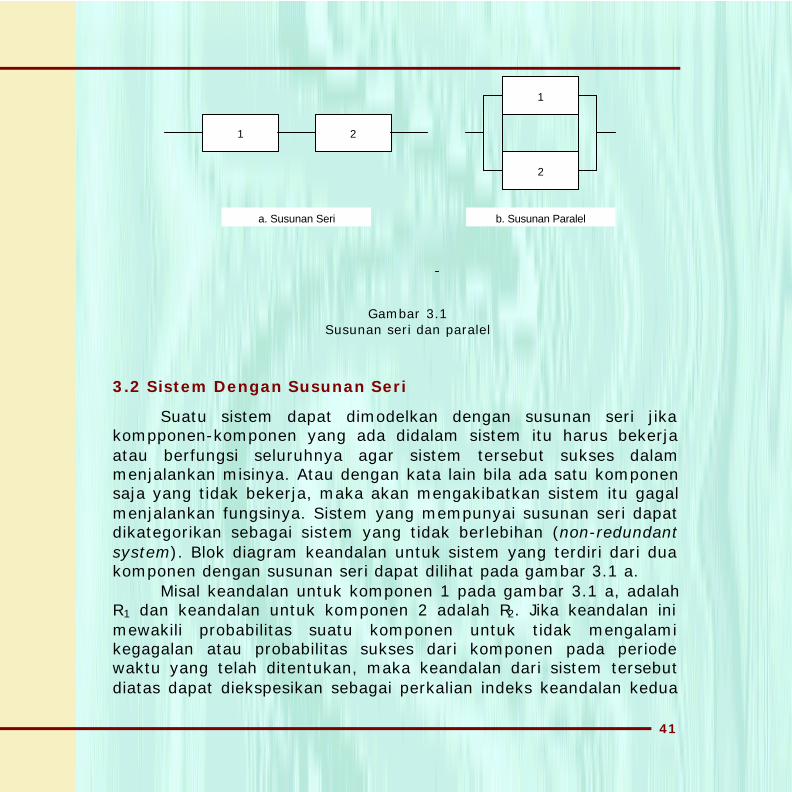
Sebagai contoh yang sederhana akan dipakai sebuah subsistemyang terdiri dari dua buah filteer. Jika didefinisikan agar sistem itudapat berfungsi diperlukan dua buah filter yang bekerja bersama-sama, maka diagram bllok keandalan dengan susunan seri adalahyang paling tepat untuk dipakai sebagai model. Sedang bila sistemitu akan berfungsi dengan baik bila hanya membutuhkan satu buahfilter yang bekerja, maka diagram blok keandalan dengan susunanparalel adalah yang paling tepat untuk dipakai sebagai model.Gambar . menunjukan blok diagram keandalan dengan susunan seridan paralel dari dua buah filter yang dipakai sebagai contohpenjelasan.
41
1 2
a. Susunan Seri
1
2
b. Susunan Paralel
Gambar 3.1Susunan seri dan paralel
3.2 Sistem Dengan Susunan Seri
Suatu sistem dapat dimodelkan dengan susunan seri jikakompponen-komponen yang ada didalam sistem itu harus bekerjaatau berfungsi seluruhnya agar sistem tersebut sukses dalammenjalankan misinya. Atau dengan kata lain bila ada satu komponensaja yang tidak bekerja, maka akan mengakibatkan sistem itu gagalmenjalankan fungsinya. Sistem yang mempunyai susunan seri dapatdikategorikan sebagai sistem yang tidak berlebihan (non-redundantsystem). Blok diagram keandalan untuk sistem yang terdiri dari duakomponen dengan susunan seri dapat dilihat pada gambar 3.1 a.
Misal keandalan untuk komponen 1 pada gambar 3.1 a, adalahR1 dan keandalan untuk komponen 2 adalah R2. Jika keandalan inimewakili probabilitas suatu komponen untuk tidak mengalamikegagalan atau probabilitas sukses dari komponen pada periodewaktu yang telah ditentukan, maka keandalan dari sistem tersebutdiatas dapat diekspesikan sebagai perkalian indeks keandalan kedua
42
komponen. Secara matematis, jika Rs menyatakan keandalan darisistem diatas maka
21RRRs = (3.1)
Dari sistem selain diekspresikan dalam keandalan, sistem itujuga bisa diekspresikan dalam bentuk ketakandalan (unreliability).Indeks ketakandalan ini mewakili probabilitas dari suatu komponenyang akan mengalami kegagalan pada periode waktu tertentu.Ketakandalan dari sebuah komponen i dinotasikan dengan notasi Qi.Hubungan antara indeks keandalan dan indeks ketandalan dari suatukomponen dapat diekspresikan kedalam rumusan sebagai berikut.
1=+ QiRi (3.2)
1 n2 . . .
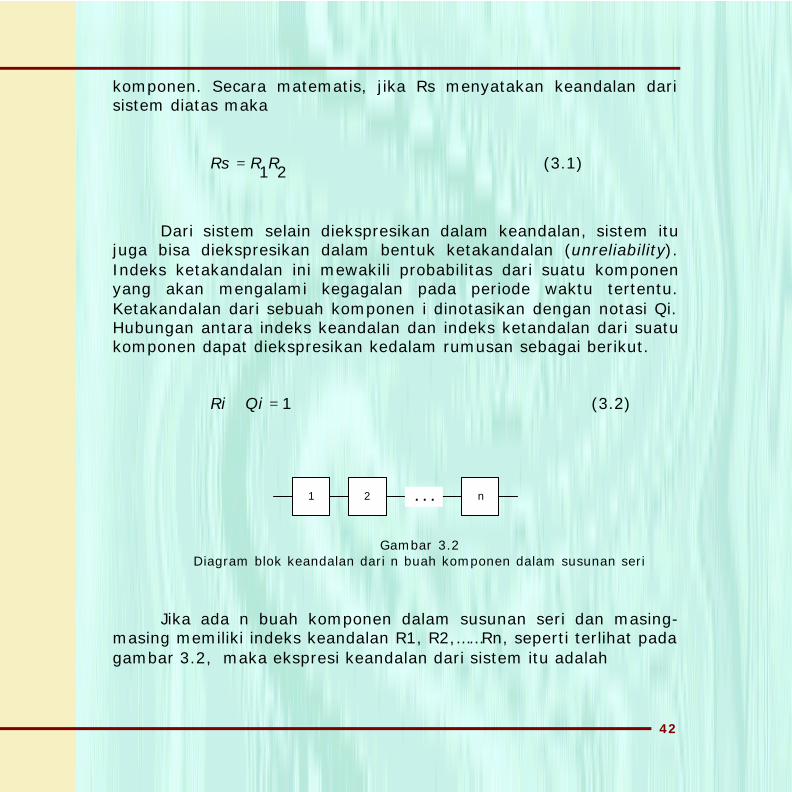
Gambar 3.2Diagram blok keandalan dari n buah komponen dalam susunan seri
Jika ada n buah komponen dalam susunan seri dan masing-masing memiliki indeks keandalan R1, R2,……Rn, seperti terlihat padagambar 3.2, maka ekspresi keandalan dari sistem itu adalah
43
iR
n
inRRR
sR
1.....
21 =Π== (3.3)
Sedang ekspresi ketakandalan dari sistem dengan susunan seri dari nbuah komponen adalah
iR
n
isR
sQ
111
=Π−=−= (3.4)
Contoh 3.1
Sebuah sistem kontrol terdiri dari lima buah unit dimana semua unitpendukungnya ini bekerja seluruhnya agar sistem kontrol tersebutdapat berfungsi. Jika indeks keandalan dari kelima unit itu masing-masing adalah 0,9; 0,95; 0,87; dan 0,9, tentukan indeks keandalandari sistem kontrol tersebut.
Solusi
Blok diagram keandalan yang paling mewakili dari sistem kontroltersebut adalah blok diagram keandalan dengan susunan seri. Jikakeandalan dari masing-masing unit diekspresikan dalam Ri makakeandalan dari sistem kontrol ituu adalah
622602,0)9,0)(93,0)(87,0)(95,0)(9,0(5
1==
=Π= Ri
iRs q
Contoh 3.2
a. Dari contoh 1, jika masing-masing komponen mempunyaikeandalan 0,9, tentukan keandalan dari sistem kontrol diatas.
44
b. Jika seorang desainer sanggup menyederhanakan sistem kontroltersebut diatas hanya menjadi tiga unit, dengan nilai keandalanuntuk masing-masing unit tetap 0,9, hitung keandalan dari sistemkontrol yang baru.
c. Beri komentar tentang nilai keandalan dari dua sistem tersebutdiatas
Solusi
a. Untuk sistem kontrol dengan susunan seri dari lima unit yangmemiliki keandalan yang sama R1 = R2 = R3 = R4 = R5 = R =0,9
59049,05)9,0(55
1===
=Π= RRii
Rs q
b. Untuk sistem kontrol dengan susunan seri dari tiga unit yangmemiliki keandalan yang sama R1 = R2 = R3 = R = 0,9
729,03)9,0(33
1===
=Π= RRii
Rs q
c. Dari hasil perhitungan diatas jelas terlihat bahwa komponen yangidentik dengan keandalan yang sama bila disusun secara seri,maka semakin banyak komponen yang disusun dalam susunanseri semakin banyak komponen yang disusun dalam susunan serisemakin turun keandalan dari sistem itu. Ini adalah karakteristikutama dari sistem dengan susunan seri. q
45
0
0,2
0,4
0,6
0,8
1
1,2
0 10 20 30 40 50 60 70 80 90 100
Jumlah Komponen
Kea
nd
alan
Sis
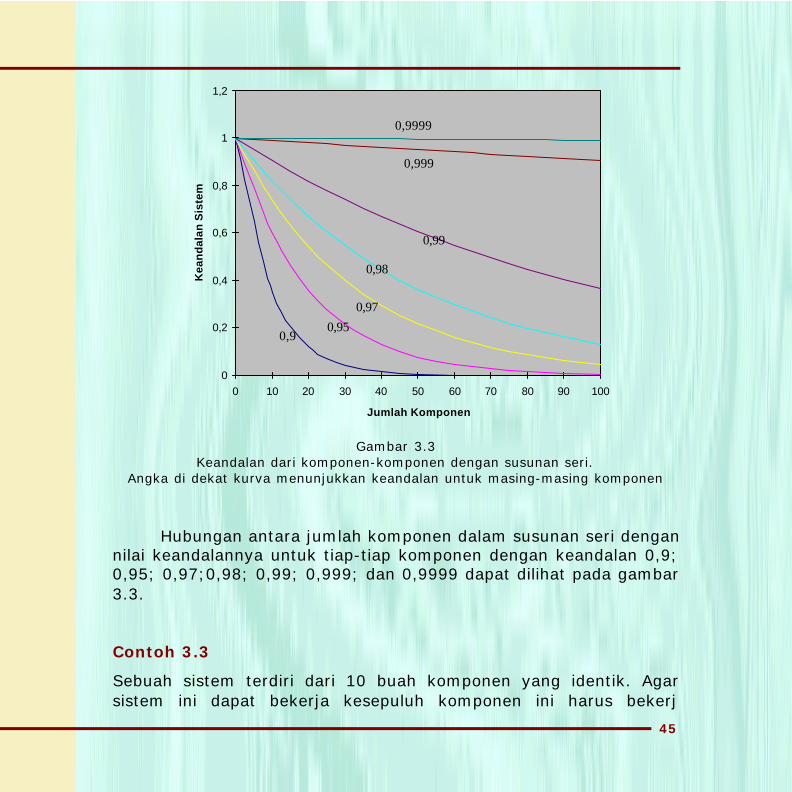
tem
Gambar 3.3Keandalan dari komponen-komponen dengan susunan seri.
Angka di dekat kurva menunjukkan keandalan untuk masing-masing komponen
Hubungan antara jumlah komponen dalam susunan seri dengannilai keandalannya untuk tiap-tiap komponen dengan keandalan 0,9;0,95; 0,97;0,98; 0,99; 0,999; dan 0,9999 dapat dilihat pada gambar3.3.
Contoh 3.3
Sebuah sistem terdiri dari 10 buah komponen yang identik. Agarsistem ini dapat bekerja kesepuluh komponen ini harus bekerj
0,9999
0,999
0,99
0,98
0,97
0,950,9
46
seluruhnya. Jika sistem ini didesain agar memiliki keandalan 0,95,tentukan nilai minimum dari masing-masing komponen
SolusiJika keandalan masing-masing kompponen adalah R, keandalanuntuk sistem itu adalah
Rs = R10
Keandalan yang disyaratkan adalah 0,95, sehingga keandalan darimasing-masing komponen dapat dicari dengan menyelesaikanpersamaan
R10 = 0,95R = 0,994884 q
Keandalan dari sistem dengan n komponen yang identik dalamsusunan seri dapat pula didapatkan dengan cara pendekatan. Carapendekatan ini diturunkan dari persamaan 3.3 dann persamaan 3.2.Secara umum keandalan dari sistem dengan n komponen yangidentik dengan keandalan untuk masing-masing komponen adalah Rdan ketakandalan untuk masing-masing komponen adalah Q dapatdiekspresikan kedalam persamaan
nRRs = (3.5)
Persamaan 3.5 diatas dapat juga ditulis dalam bentukketakandalan sebagai
nQRs )1( −= (3.6)
47
Dengan menerapkan teorema binomial, persamaan diatasdapat diselesaikan menjadi
nQQnn
QnRs )(....2)(2
)1()(1 −++−−+−+= (3.7)
Jika nilai dari Q adalah sangat kecil, maka keandalan dari sistemdengan n komponen yang identik dalam susunan seri adalah
nQRs −≈ 1 (3.8)
Persamaan (3.8) dapat pula dipakai untuk menyelesaikan contoh soal3.3
0,95 = 1 –10QQ = 5 x 10-3
R = 1 – Q = 1 – 5 x 10-3 = 0,995
Hasil perhitungan ini 0,012% lebih tinggi dari hasil perhitunganeksak. Untuk perhitungan dengan metode pendekatan, hasil yangdiperoleh inii tidak terlalu jelek
3.3 Sistem Dengan Susunan Paralel
Suatu sistem dapat dimodelkan dengan susunan paralel jikaseluruh komponen-komponen yang ada didalam sistem itu gagalberfungsi maka akan mengakibatkan sistem itu gagal menjalankanfungsinya. Sistem yang memiliki konfigurasi paralel dapat
48
dikategorikan sebagai sistem yang sangat berlebihan (fully redundantsystem). Blok diagram keandalan untuk sistem yang terdiri dari duakomponen dengan susunan paralel dapat dilihat pada gambar 3.1 b.
Misal ketakandalan untuk komponen 1 pada gambar 3.1 badalah Q1 dan ketakandalan untuk komponen 2 adalah Q2. Jikaketakandalan ini mewakili probabilitas suatu komponen untukmengalami kegagalan dari komponen pada periode waktu yang telahditentukan, maka ketakandalan dari sistem tersebut diatas dapatdiekspresikan sebagai perkalian ketakandalan dari sistem tersebutdiatas dapat diekspresikan sebagai perkalian ketakandalan keduakomponen. Secara matematis, jika Qp menyatakan ketakandalan darisistem diatas maka
21QQpQ = (3.9)
Sedangkan ekspresi keandalan dari sistem dengan susunanparalel untuk gambar 3.1 b adalah
2111 QQQpRp −=−= (3.10)
atau
2121)21)(11(1 RRRRRRRp −+=−−−= (3.11)
Sedang untuk n komponen yang tersusun dalam susunanparalel dengan ketakandalan untuk masing-masing komponen adalahQi maka ekspresi ketakandalan dari sistem ituu adalah
iQn
inQQQpQ1
....21 =Π== (3.12)
49
1
2
. . .
n
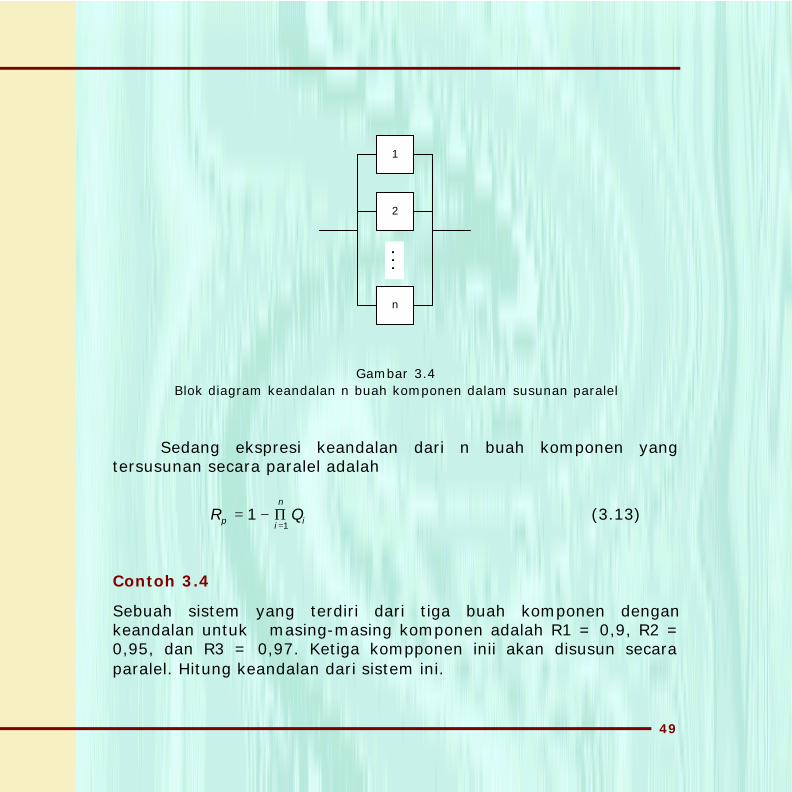
Gambar 3.4Blok diagram keandalan n buah komponen dalam susunan paralel
Sedang ekspresi keandalan dari n buah komponen yangtersusunan secara paralel adalah
i
n
ip QR1
1=Π−= (3.13)
Contoh 3.4
Sebuah sistem yang terdiri dari tiga buah komponen dengankeandalan untuk masing-masing komponen adalah R1 = 0,9, R2 =0,95, dan R3 = 0,97. Ketiga kompponen inii akan disusun secaraparalel. Hitung keandalan dari sistem ini.
50
Solusi
Ketakandalan dari sistem ini adalahQp = Q1Q2Q3 = 0,1 x 0,05 x 0,03 = 1,5 x 10-4
Keandalan dari sistem inii adalahRp = 1 – Q p = 1 – 1,5 x 10-4 = 0,99985
Contoh 3.5
Seorang system engineer akan mendesain sebuah subsistem yangmerupakan bagian dari sebuah sistem pengolahan minyak. Subsistemini hanya memerlukan satu buah komponen agar dapat menunjangproses pengolahan minyak. Untuk meningkatkan keandalan darisubsistem ini insiyur tadi merencanakan akan memasang komponenyang identik dalam subsistem ini secara paralel. Karena keterbatasandana hanya ada tiga buah alternatif subsistem yang akan ia desain,masing-masing desain terdiri dari 2,3, dan 4 komponen. Keandalandari masing-masing komponen ini adalah 0,98. Jika sasaran daripemilihan desain ini adalah untuk mendapatkan tingkat keandalanyang tinggi, susunan mana kira-kira yang akan dipilih oleh insyiyurtadi.
51
0
0,2
0,4
0,6
0,8
1
1,2
0 2 4 6 8 10
Jumlah Komponen
Kea
nd
alan
Sis
tem
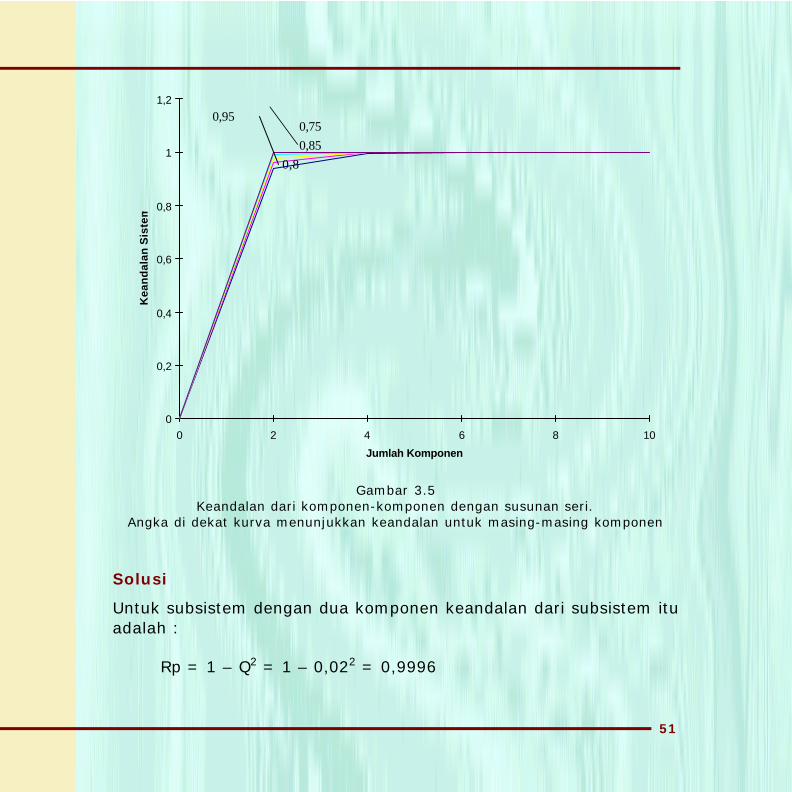
Gambar 3.5Keandalan dari komponen-komponen dengan susunan seri.
Angka di dekat kurva menunjukkan keandalan untuk masing-masing komponen
Solusi
Untuk subsistem dengan dua komponen keandalan dari subsistem ituadalah :
Rp = 1 – Q2 = 1 – 0,022 = 0,9996
0,75
0,80,85
0,95
52
Untuk subsistem dengan tiga komponen keandalan dari subsistem ituadalah
Rp = 1 – Q3 = 1 – 0,023 = 0,999992
Untuk subsistem dengan empat komponen keandalan dari subsistemitu adalah :
Rp = 1 – Q4 = 1 – 0,024 = 0,99999984
Dari hasil perhitungan diatas jelas insiyur tadi akan memilih desainketiga yaitu buah komponen dalam susunan paralel.
Dari contoh desain diatas, jelas terlihat bahwa keandalan darisistem dengan susunan paralel akan bertambah seiring denganbertambahnya jumalh komponen. Hal inii merupakan seiring denganbertambahnya jumlah komponen. Hal ini merupakan sifat utama darisuatu sistem dengan susunan paralel. Reprensentasi grafis dari sifatutama ini dapat dilihat pada gambar 3.5.
3.4 Sistem Dengan Susunan Gabungan Seri - Paralel
Untuk menganalisa suatu sistem sederhana dengan susunanseri atau paralel sudah didiskusikan pada seksi terdahulu. Susunanseri atau paralel merupakan susunan dasar yang akan dipakai untukmenganalisa sistem yang mempunayai susunan yang lebih kompleks.Blok diagram keandalan yang lebih kompleks akan mempunyaistruktur gabungan antara susunan seri dan paralel.
Prinsip dasar yang dipakai untuk menyelesaikan konfigurasiyang komplek ini adalah dengan mereduksi konfigurasi yang komplekiin secara berurutan dengan jalan menyederhanakan blok yang
53
mempunayi struktur seri atau paralel terlebih dahulu menjadi blokdiagram yang ekuivalen. Blok diagram yang ekuivalen ini akanmewakilii konfigurasi asli sebelum konfigurasi ini disederhanakan.Untuk jelasnya akan diberikan beberapa contoh berikut ini.
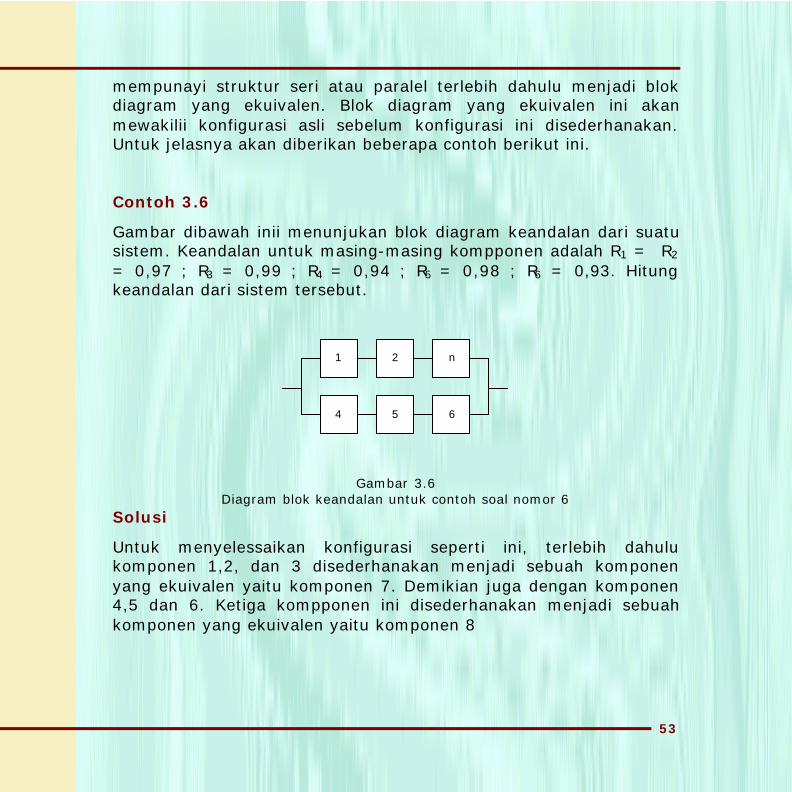
Contoh 3.6
Gambar dibawah inii menunjukan blok diagram keandalan dari suatusistem. Keandalan untuk masing-masing kompponen adalah R1 = R2
= 0,97 ; R3 = 0,99 ; R4 = 0,94 ; R5 = 0,98 ; R6 = 0,93. Hitungkeandalan dari sistem tersebut.
1 n2
4 65
Gambar 3.6Diagram blok keandalan untuk contoh soal nomor 6
Solusi
Untuk menyelessaikan konfigurasi seperti ini, terlebih dahulukomponen 1,2, dan 3 disederhanakan menjadi sebuah komponenyang ekuivalen yaitu komponen 7. Demikian juga dengan komponen4,5 dan 6. Ketiga kompponen ini disederhanakan menjadi sebuahkomponen yang ekuivalen yaitu komponen 8
54
7
8
9
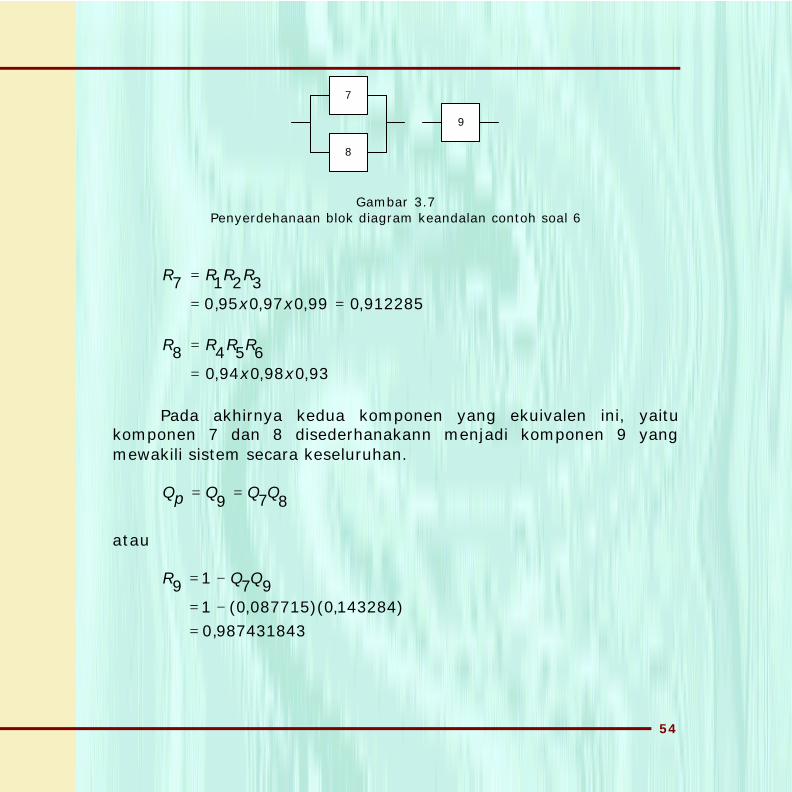
Gambar 3.7Penyerdehanaan blok diagram keandalan contoh soal 6
912285,099,097,095,03217
==
=
xx
RRRR
93,098,094,06548
xx
RRRR
=
=
Pada akhirnya kedua komponen yang ekuivalen ini, yaitukomponen 7 dan 8 disederhanakann menjadi komponen 9 yangmewakili sistem secara keseluruhan.
879 QQQpQ ==
atau
987431843,0)143284,0)(087715,0(1
9719
=−=
−= QQR
55
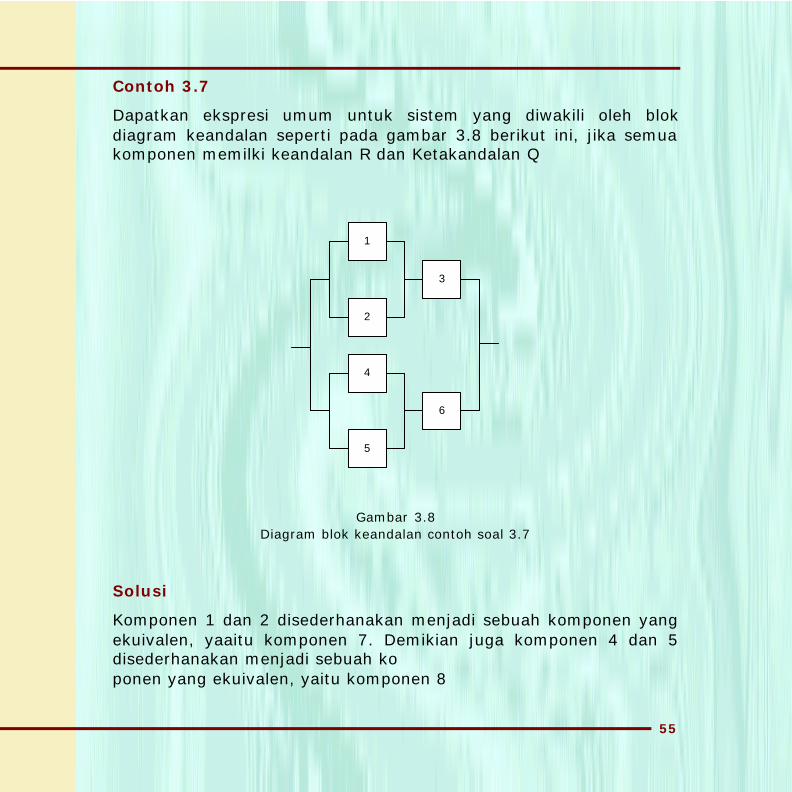
Contoh 3.7
Dapatkan ekspresi umum untuk sistem yang diwakili oleh blokdiagram keandalan seperti pada gambar 3.8 berikut ini, jika semuakomponen memilki keandalan R dan Ketakandalan Q
1
2
3
4
5
6
Gambar 3.8Diagram blok keandalan contoh soal 3.7
Solusi
Komponen 1 dan 2 disederhanakan menjadi sebuah komponen yangekuivalen, yaaitu komponen 7. Demikian juga komponen 4 dan 5disederhanakan menjadi sebuah koponen yang ekuivalen, yaitu komponen 8
56
7
68
3
10
9
11
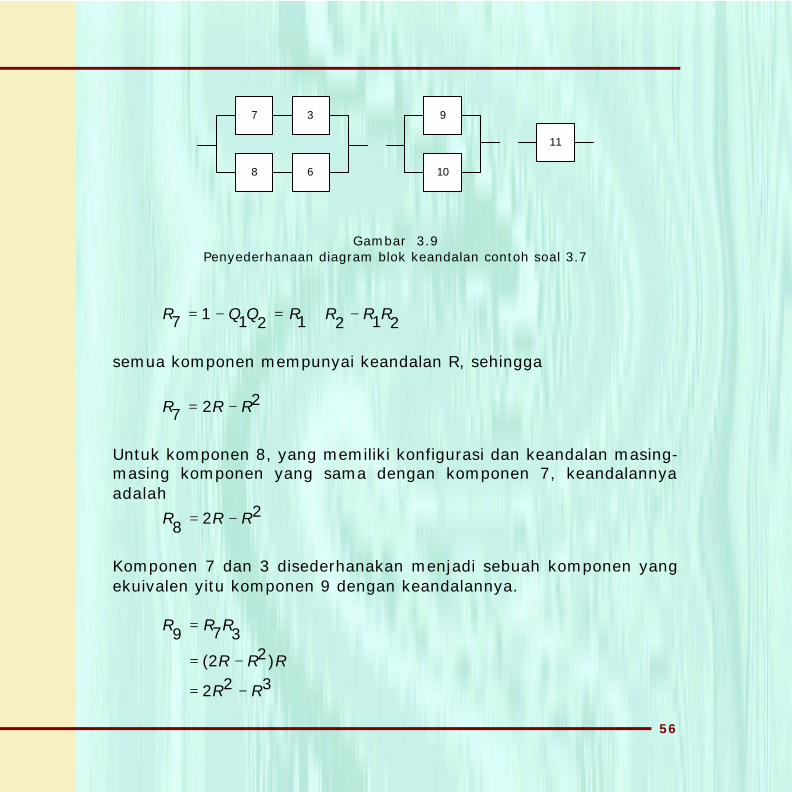
Gambar 3.9Penyederhanaan diagram blok keandalan contoh soal 3.7
21212117 RRRRQQR −+=−=
semua komponen mempunyai keandalan R, sehingga
227 RRR −=
Untuk komponen 8, yang memiliki konfigurasi dan keandalan masing-masing komponen yang sama dengan komponen 7, keandalannyaadalah
228 RRR −=
Komponen 7 dan 3 disederhanakan menjadi sebuah komponen yangekuivalen yitu komponen 9 dengan keandalannya.
322
)22(
379
RR
RRR
RRR
−=
−=
=
57
Untuk komponen 10, yang memiiki konfigurasi dan keandalanmasing-masing komponen yang sama dengan komponen 9,keandalannya adalah
322
)22(
6810
RR
RRR
RRR
−=
−=
=
Keandalannya untuk seluruh sistem adalah
2)322(
10911
RR
RRR
−=
=
3.5 Sistem dengan Susunan Berlebihan Secara Parsial(Partially Redundant System)
Jika sistem dengan susunan seri dikategorikan sebagai sistemyang tidak berlebihan (non-redundant system) dan sistem dengansusunan paralel dikategorikan sebagai sistem dengan susunan yangsangat berlebihan (fully redundant system), maka ada sebuah sistemyang bisa dikategorikan sebagai sistem dengan susunan berlebihansecara parsial (partially redundant system).
Untuk mengevaluasi keandalan dari sistem yang memilikikonfigurasi berlebihan secara parsial, konsep susunan seri dansusunan paralel yang telah dibahas di seksi terdahulu tidak dapatlangsung diterapkan. Untuk menyelesaikan perhitungan keandalansistem ini, perlu diterapkan konsep distribusi binomial. Contoh berikut
58
akan memperjelas pembahasan mengenai sistem dengan strukturberlebihan secara parsial.
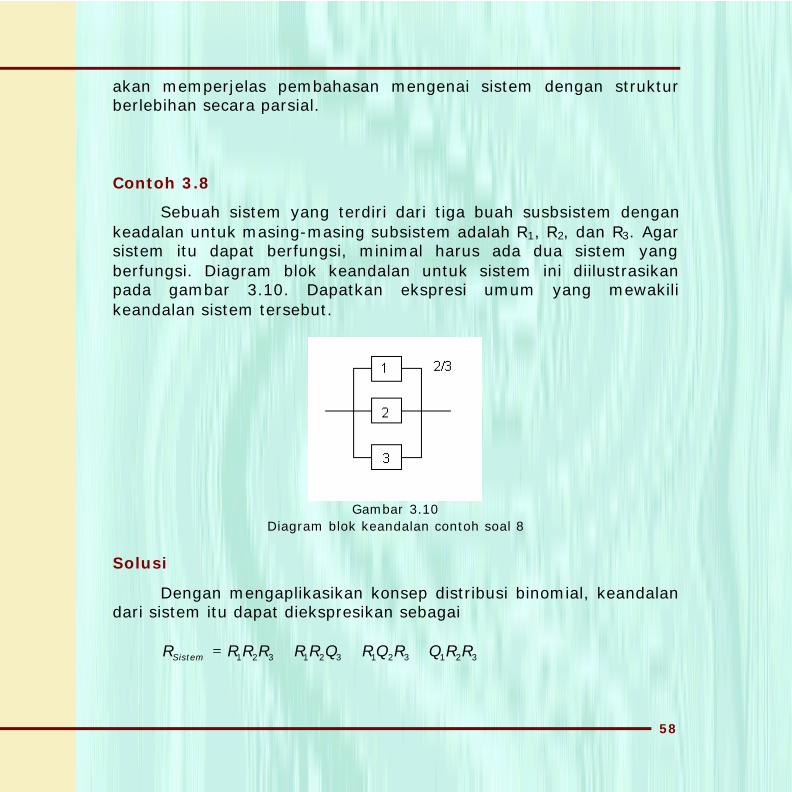
Contoh 3.8
Sebuah sistem yang terdiri dari tiga buah susbsistem dengankeadalan untuk masing-masing subsistem adalah R1, R2, dan R3. Agarsistem itu dapat berfungsi, minimal harus ada dua sistem yangberfungsi. Diagram blok keandalan untuk sistem ini diilustrasikanpada gambar 3.10. Dapatkan ekspresi umum yang mewakilikeandalan sistem tersebut.
Gambar 3.10Diagram blok keandalan contoh soal 8
Solusi
Dengan mengaplikasikan konsep distribusi binomial, keandalandari sistem itu dapat diekspresikan sebagai
321321321321 RRQRQRQRRRRRRSistem +++=
59
Jika masing-masing subsistem memiliki keandalan yang sama yaituR, maka ekspresi keandalan dari sistem itu adalah
QRRRSistem23 3+=
q
3.6 Pertimbangan Desain Antara Susunan Seri dan Paralel
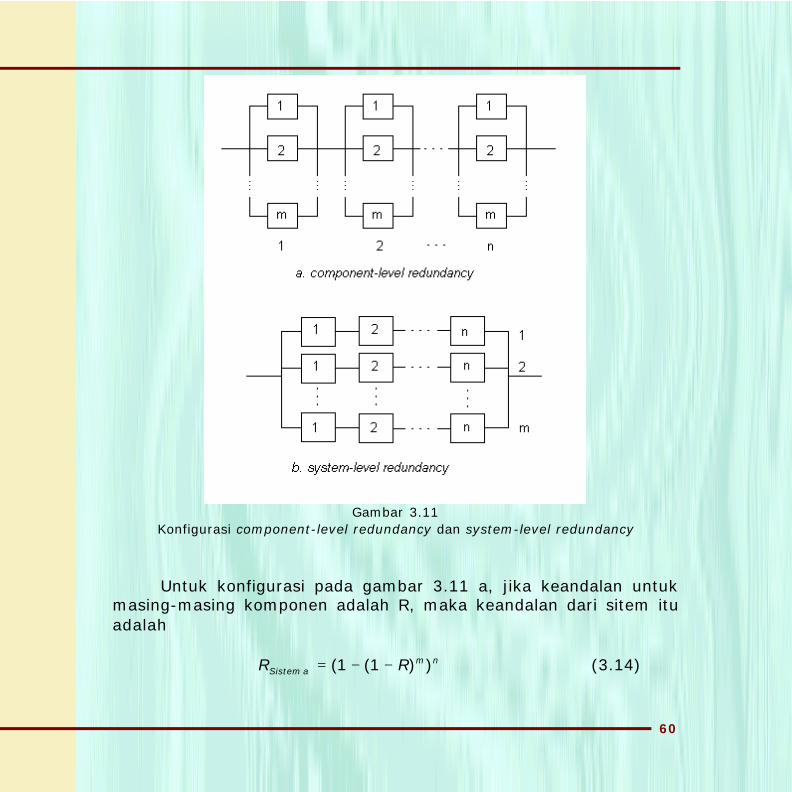
Misalkan ada sebuah sistem yang terdiri dari n buah komponendalam susunan seri. Untuk meningkatkan keandalan dari sistem iniada dua cara dasar yang umum dipakai yaitu dengan membuatmasing-masing komponen yang ada di sistem berlebihan(component-level redundancy) atau membuat sistemya yangberlebihan (system-level redundancy). Diagram blok untuk keduaalternatif desain ini dapt dilihat pada gambar 3.11.
60
Gambar 3.11Konfigurasi component-level redundancy dan system-level redundancy
Untuk konfigurasi pada gambar 3.11 a, jika keandalan untukmasing-masing komponen adalah R, maka keandalan dari sitem ituadalah
nmaSistem RR ))1(1( −−= (3.14)
61
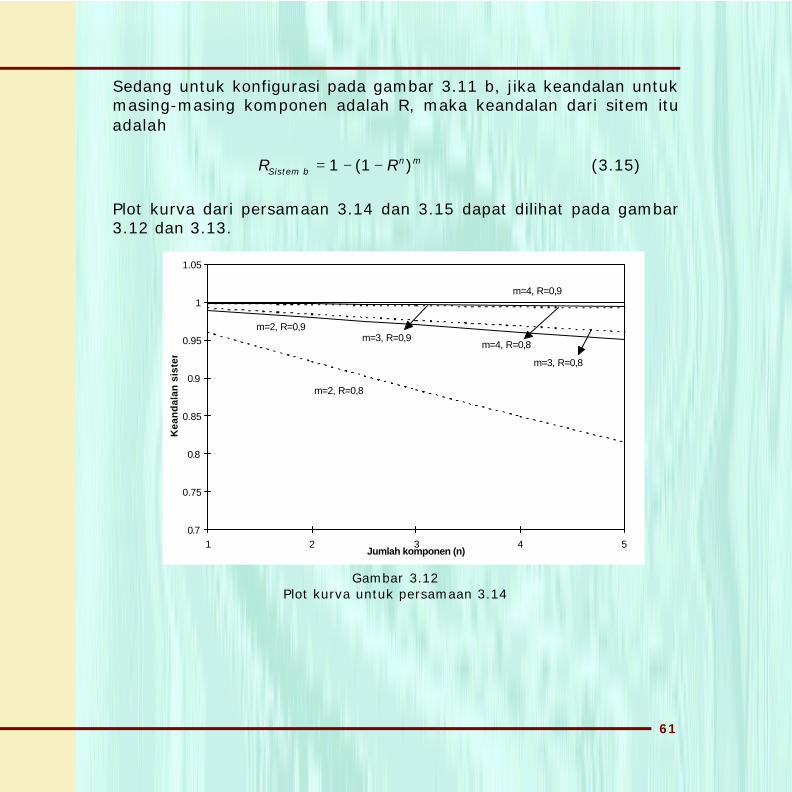
Sedang untuk konfigurasi pada gambar 3.11 b, jika keandalan untukmasing-masing komponen adalah R, maka keandalan dari sitem ituadalah
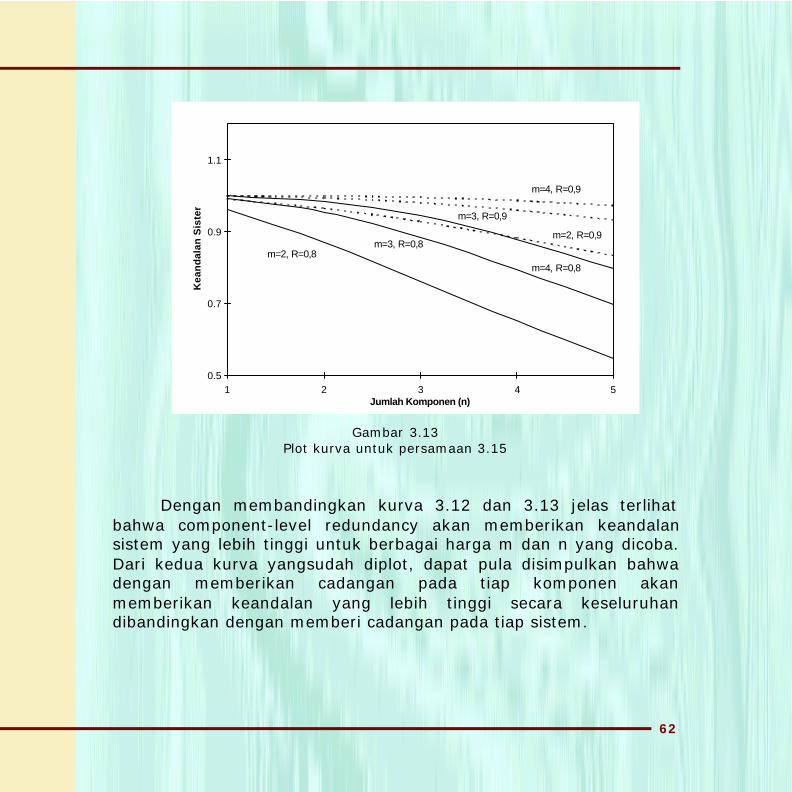
mnbSistem RR )1(1 −−= (3.15)
Plot kurva dari persamaan 3.14 dan 3.15 dapat dilihat pada gambar3.12 dan 3.13.
0.7
0.75
0.8
0.85
0.9
0.95
1
1.05
1 2 3 4 5Jumlah komponen (n)
Kea
nd
alan
sis
tem
m=2, R=0,8
m=3, R=0,8
m=4, R=0,8
m=2, R=0,9m=3, R=0,9
m=4, R=0,9
Gambar 3.12Plot kurva untuk persamaan 3.14
62
0.5
0.7
0.9
1.1
1 2 3 4 5Jumlah Komponen (n)
Kea
nd
alan
Sis
tem
m=2, R=0,8m=3, R=0,8
m=4, R=0,8
m=2, R=0,9
m=3, R=0,9
m=4, R=0,9
Gambar 3.13Plot kurva untuk persamaan 3.15
Dengan membandingkan kurva 3.12 dan 3.13 jelas terlihatbahwa component-level redundancy akan memberikan keandalansistem yang lebih tinggi untuk berbagai harga m dan n yang dicoba.Dari kedua kurva yangsudah diplot, dapat pula disimpulkan bahwadengan memberikan cadangan pada tiap komponen akanmemberikan keandalan yang lebih tinggi secara keseluruhandibandingkan dengan memberi cadangan pada tiap sistem.
63
3.7 Standby Redundant System
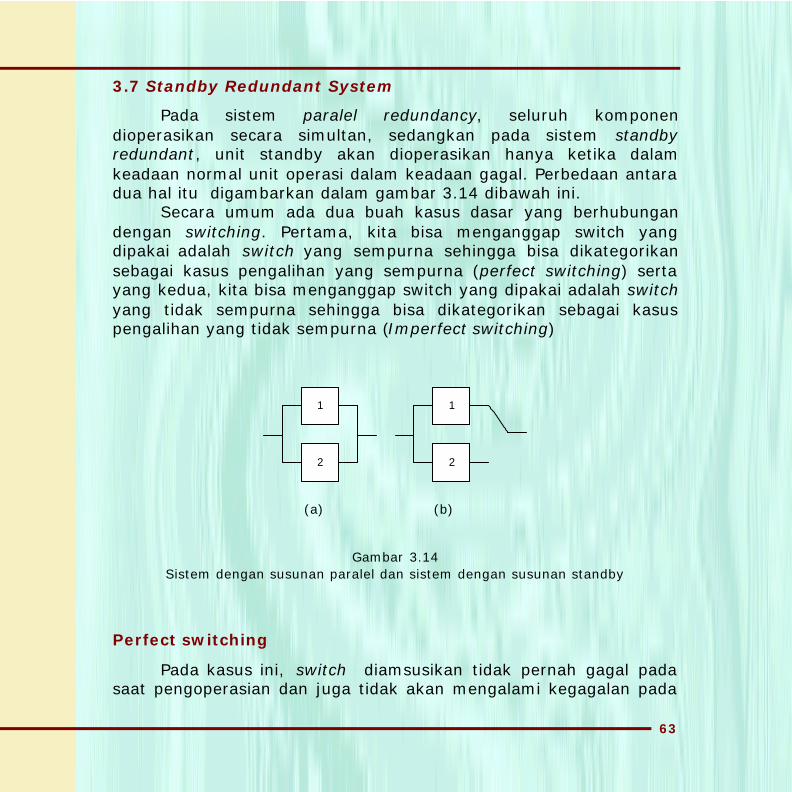
Pada sistem paralel redundancy, seluruh komponendioperasikan secara simultan, sedangkan pada sistem standbyredundant, unit standby akan dioperasikan hanya ketika dalamkeadaan normal unit operasi dalam keadaan gagal. Perbedaan antaradua hal itu digambarkan dalam gambar 3.14 dibawah ini.
Secara umum ada dua buah kasus dasar yang berhubungandengan switching. Pertama, kita bisa menganggap switch yangdipakai adalah switch yang sempurna sehingga bisa dikategorikansebagai kasus pengalihan yang sempurna (perfect switching) sertayang kedua, kita bisa menganggap switch yang dipakai adalah switchyang tidak sempurna sehingga bisa dikategorikan sebagai kasuspengalihan yang tidak sempurna (Imperfect switching)
2
1
2
1
(a) (b)
Gambar 3.14Sistem dengan susunan paralel dan sistem dengan susunan standby
Perfect switching
Pada kasus ini, switch diamsusikan tidak pernah gagal padasaat pengoperasian dan juga tidak akan mengalami kegagalan pada
64
saat melakukan pengalihan dari pengoperasian normal ke posisistandby. Gambar 3.14 merupakan contoh tipikal dari sebuah sistemyang memiliki susunan standby.
Jika diasumsikan bahwa komponen 2 tidak mengalamikegagalan pada saat sedang dalam kondisi standby, maka sistemhanya akan mengalami kegagalan bila komponen 1 satu telah gagalsebelumnya dan setelah pengoperasiannya dialihkan ke komponen 2,komponen 2 juga gagal beroperasi.
Karena itu probabilitas kegagalan sistem dapat dinyatakan kedalam persamaan berikut ini.
)12()1( QQQ = (3.16)
Jika diasumsikan komponen 1 dan komponen 2 saling bebas(independent), maka persamaan (3.160 dapat disederhanakanmenjadi
21)2()1( QQQQQ ≡= (3.17)
Persamaan (3.17) memberikan kesan seolah – olah samadengan persamaan ketakandalan sistem yang memiliki duakomponen dengan susunan paralel. Hal ini tidaklah benar karena nilainumerik dari ketakandalan untuk komponen 2 tidak sama, karenakomponen 2, yang merupakan komponen standby, hanya dipakaidalam waktu yang sangat singkat, sehingga indeks ketakandalankomponen 2 bila difungsikan sebagai komponen aktif dan standbyakan memiliki indeks yang berbeda.
65
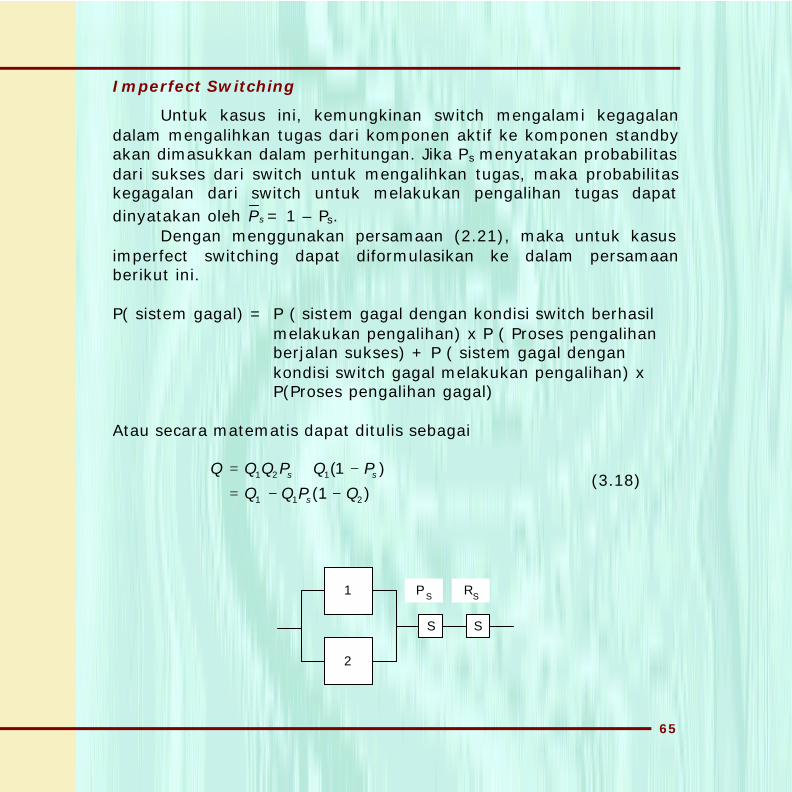
Imperfect Switching
Untuk kasus ini, kemungkinan switch mengalami kegagalandalam mengalihkan tugas dari komponen aktif ke komponen standbyakan dimasukkan dalam perhitungan. Jika Ps menyatakan probabilitasdari sukses dari switch untuk mengalihkan tugas, maka probabilitaskegagalan dari switch untuk melakukan pengalihan tugas dapatdinyatakan oleh sP = 1 – Ps.
Dengan menggunakan persamaan (2.21), maka untuk kasusimperfect switching dapat diformulasikan ke dalam persamaanberikut ini.
P( sistem gagal) = P ( sistem gagal dengan kondisi switch berhasilmelakukan pengalihan) x P ( Proses pengalihanberjalan sukses) + P ( sistem gagal dengankondisi switch gagal melakukan pengalihan) xP(Proses pengalihan gagal)
Atau secara matematis dapat ditulis sebagai
)1(
)1(
211
121
QPQQ
PQPQQQ
s
ss
−−=−+=
(3.18)
2
1
S S
PS RS
66
Gambar 3.15Blok diagram untuk kasus standby redundancy dengan switch tak sempurna
Persamaan (3.18) untuk imperfect switching yang telahditurunkan, dapat diperluas lagi dengan menambahkan blok diagramlagi pada gambar 3.14 b, sehingga blok diagram keandalan untukkasus imperfect switching berubah menjadi seperti pada gambar3.15. Blok diagram S yang pertama mewakili switch dalammelakukan proses pengalihan dari komponen aktif 1 ke komponenstandby 2 dengan probabilitas kesuksesan Ps, sedangkan blokdiagram kedua mewakili mode pengoperasian normal dari switchdengan indeks keandalan Rs dan indeks ketakandalan Qs. Darigambar 3.15 terlihat bahwa tambahan komponen kedua disusunsecar seri dengan susunan komponen yang sudah ada, sehinggapersamaan keandalan dari sistem di atas dapat ditulis sebagai
ss RQPQQR )]}1([1{ 211 −−−= (3.19)
3.8 Pemodelan Jaringan yang Kompleks
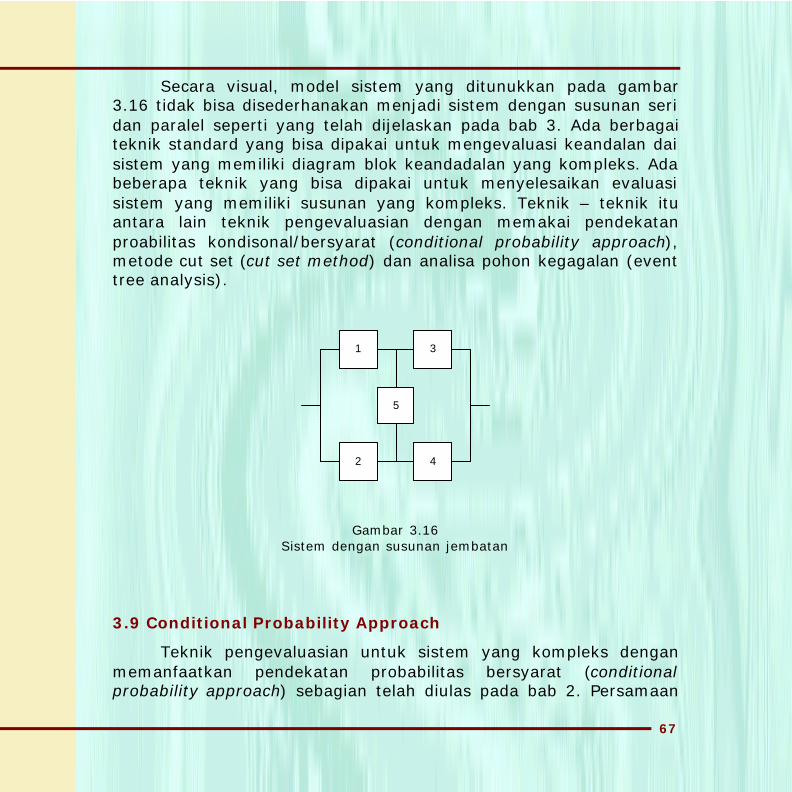
Pada seksi terdahulu telah dibahas bagaimana memodelkan danmengevaluasi keandalan dari suatu sistem yang memiliki susunanyang sangat sederhana. Pemodelan yang dimaksud adalahpemodelan sistem dengan susunan seri atau paralel. Ada beberapasusunan model yang pengevaluasian keandalannya tidak bisadiselesaikan hanya dengan mengandalkan teknik pengevaluasiansusunan seri atau paralel saja. Contoh yang sering dipakai untuksusunan yang kompleks adalah susunan jembatan seperti yangterlihat pada gambar 3.16.
67
Secara visual, model sistem yang ditunukkan pada gambar3.16 tidak bisa disederhanakan menjadi sistem dengan susunan seridan paralel seperti yang telah dijelaskan pada bab 3. Ada berbagaiteknik standard yang bisa dipakai untuk mengevaluasi keandalan daisistem yang memiliki diagram blok keandadalan yang kompleks. Adabeberapa teknik yang bisa dipakai untuk menyelesaikan evaluasisistem yang memiliki susunan yang kompleks. Teknik – teknik ituantara lain teknik pengevaluasian dengan memakai pendekatanproabilitas kondisonal/bersyarat (conditional probability approach),metode cut set (cut set method) dan analisa pohon kegagalan (eventtree analysis).
1
42
5
3
Gambar 3.16Sistem dengan susunan jembatan
3.9 Conditional Probability Approach
Teknik pengevaluasian untuk sistem yang kompleks denganmemanfaatkan pendekatan probabilitas bersyarat (conditionalprobability approach) sebagian telah diulas pada bab 2. Persamaan
68
2.20 dan 2.21 akan dipakai untuk mengevaluasi keandalan sistem.Kedua persamaan itu adalah
)jelek)P(B kondisi Bdalam jika sukses P(sistem
)baik)P(B kondisi Bdalam jika sukses P(sistemsukses) P(sistem
f
S +=
(3.20)
Sedangkan probabilitas dari kejadian komplemennya adalah
)()jelek kondisi Bdalam jika gagal sistem(
)()baik kondisi Bdalam jika gagal sistem()gagal sistem(
f
S
BPP
BPPP +=
(3.21)
Contoh 3.9
Untuk sistem yang diwakili oleh gambar 3.16, sistem itu akanberfungsi jika salah satu jalur 13, 24, 154, atau 253 dalam kondisiyang bagus. Tentukan ekspresi keandalan dari sistem yang memilikiblok diagram keandalan seperti pada gambar 3.16.
Solusi
Untuk menerapkan pendekatan probabilitas bersyarat, yangpertama harus dilakukan adalah memilih komponen yang akandipertimbangkan sebagai komponen yang baik dan komponen yangburuk. Semua komponen yang ada yaitu komponen 1 sampaikomponen 5 dapat dipilih sebagai komponen yang akandipertimbangkan sebagai komponen yang baik dan buruk. Pemilihankomponen ini sangat penting, karena pemilihan komponen yang tepatakan sangat membantu untuk mempercepat penyelesaian evaluasikeandalan dari sistem.
69
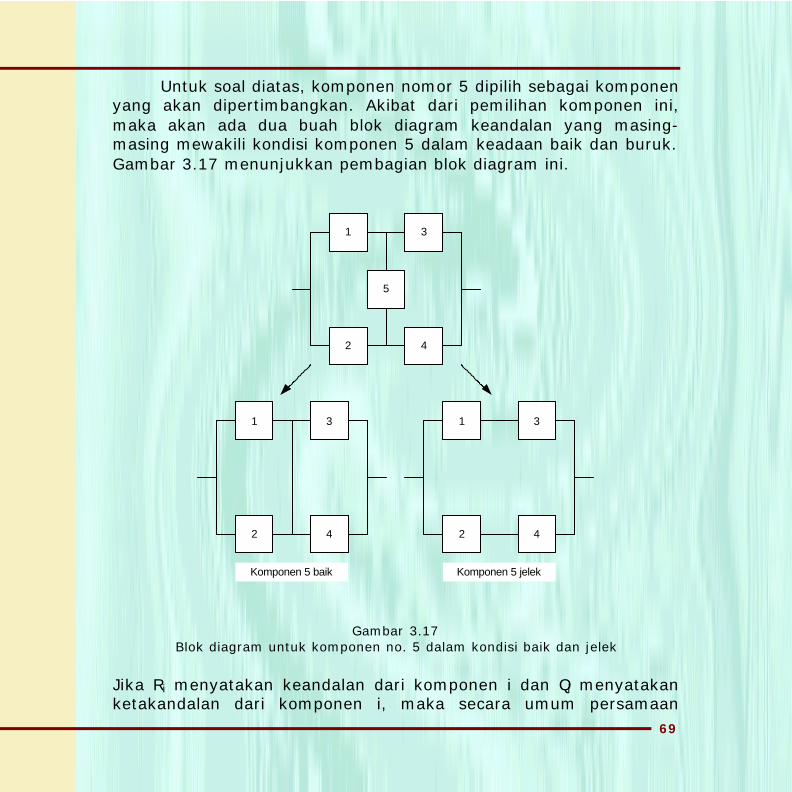
Untuk soal diatas, komponen nomor 5 dipilih sebagai komponenyang akan dipertimbangkan. Akibat dari pemilihan komponen ini,maka akan ada dua buah blok diagram keandalan yang masing-masing mewakili kondisi komponen 5 dalam keadaan baik dan buruk.Gambar 3.17 menunjukkan pembagian blok diagram ini.
1
42
5
3
1
42
3 1
42
3
Komponen 5 baik Komponen 5 jelek
Gambar 3.17Blok diagram untuk komponen no. 5 dalam kondisi baik dan jelek
Jika Ri menyatakan keandalan dari komponen i dan Qi menyatakanketakandalan dari komponen i, maka secara umum persamaan
70
keandalan untuk blok diagram dengan susunan jembatan sepertiterlihat pada gambar 3.17 adalah
55 jelek) 5 no. komp. jika(baik) 5 no. komp. jika( QRRRR SSS += (3.22)
Untuk blok yang pertama, dimana komponen nomor 5 dianggapdalam kondisi yang bagus, persamaan keandalan dari blok di atasadalah
)Q-(1)Q-(1=baik) 5 no. komp. jika( 4321 QQRS (3.23)
Untuk blok yang kedua, dimana komponen nomor 5 dianggap dalamkondisi yang jelek, persamaan keandalan dari blok di atas adalah
)-(1)-(1-1=jelek) 5 no. komp. jika( 4231 RRRRRS (3.24)
Dengan mensubstitusikan persamaan (3.23) dan (3.24) ke dalampersamaan (3.22), maka akan diperoleh persamaan keandalan darisistem yang dimaksud. Persamaan keandalan dari sistem itu adalah
5423154321 ))1)(1(1()1)(1( QRRRRRQQQQRS −−−+−−= (3.25)
Jika masing-masing komponen memiliki nilai keandalan R = 0,95,maka keandalan dari sistem itu adalah
05,0))95,01(1(95,0)05,01())1(1()1( 22222222 ×−−+×−=−−+−= QRRQRS
994781,0=SR o
71
4
5 3
2
1
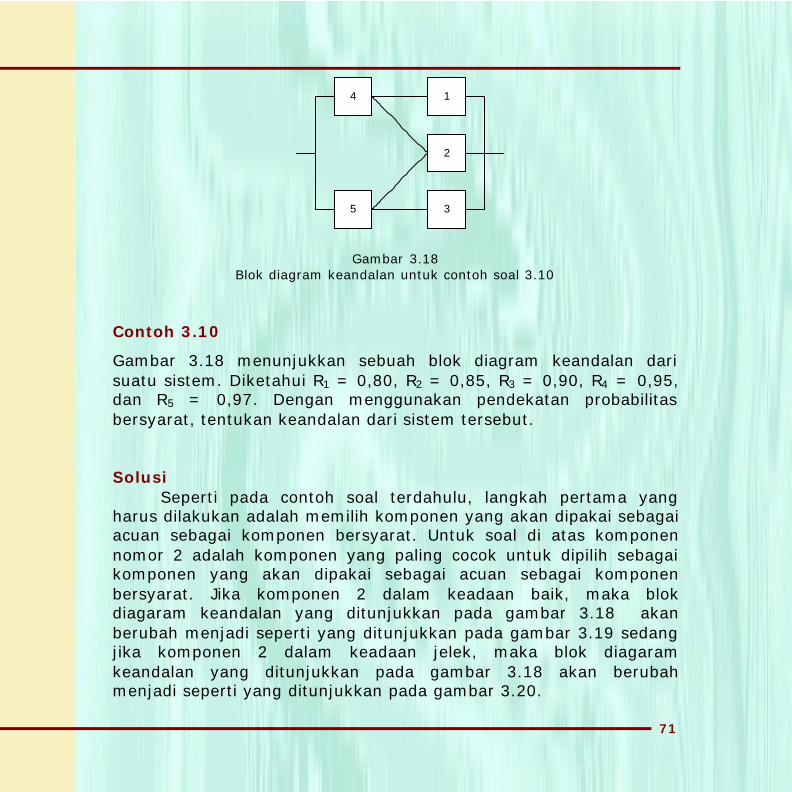
Gambar 3.18Blok diagram keandalan untuk contoh soal 3.10
Contoh 3.10
Gambar 3.18 menunjukkan sebuah blok diagram keandalan darisuatu sistem. Diketahui R1 = 0,80, R2 = 0,85, R3 = 0,90, R4 = 0,95,dan R5 = 0,97. Dengan menggunakan pendekatan probabilitasbersyarat, tentukan keandalan dari sistem tersebut.
SolusiSeperti pada contoh soal terdahulu, langkah pertama yang
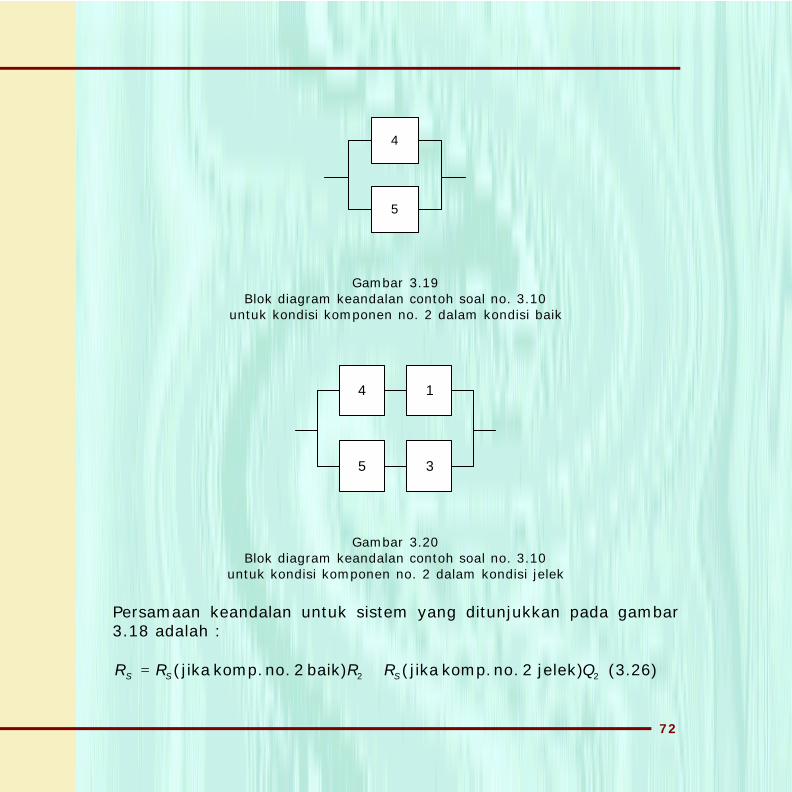
harus dilakukan adalah memilih komponen yang akan dipakai sebagaiacuan sebagai komponen bersyarat. Untuk soal di atas komponennomor 2 adalah komponen yang paling cocok untuk dipilih sebagaikomponen yang akan dipakai sebagai acuan sebagai komponenbersyarat. Jika komponen 2 dalam keadaan baik, maka blokdiagaram keandalan yang ditunjukkan pada gambar 3.18 akanberubah menjadi seperti yang ditunjukkan pada gambar 3.19 sedangjika komponen 2 dalam keadaan jelek, maka blok diagaramkeandalan yang ditunjukkan pada gambar 3.18 akan berubahmenjadi seperti yang ditunjukkan pada gambar 3.20.
72
5
4
Gambar 3.19Blok diagram keandalan contoh soal no. 3.10
untuk kondisi komponen no. 2 dalam kondisi baik
4
35
1
Gambar 3.20Blok diagram keandalan contoh soal no. 3.10
untuk kondisi komponen no. 2 dalam kondisi jelek
Persamaan keandalan untuk sistem yang ditunjukkan pada gambar3.18 adalah :
22 jelek) 2 no. komp. jika(baik) 2 no. komp. jika( QRRRR SSS += (3.26)
73
Untuk kondisi jika komponen 2 dalam keadaan baik, maka keandalandari sistemnya bisa diturunkan dari blok diagram pada gambar 3.19,yaitu
9985,0)03,005,0(1
Q-1=baik) 2 no. komp. jika( 54
=×−=QRS (3.27)
Untuk kondisi jika komponen 2 dalam keadaan jelek, maka keandalandari sistemnya bisa diturunkan dari blok diagram pada gambar 3.20,yaitu
96952,0 )97,090,01)(95,080,01(1
)R-)(1RR-(1-1=jelek) 2 no. komp. jika( 5341
=×−×−−=
RRS
(3.28)
Dengan memasukkan nilai-nilai yang diperoleh pada persamaan(3.27) dan (3.28) ke dalam persamaan (3.26), maka akan diperolehkeandalan dari sistem. Nilai keandalan dari sistem itu adalah :
22 jelek) 2 no. komp. jika(baik) 2 no. komp. jika( QRRRR SSS +=994153,015,096952,085,09985,0 =×+×=SR o
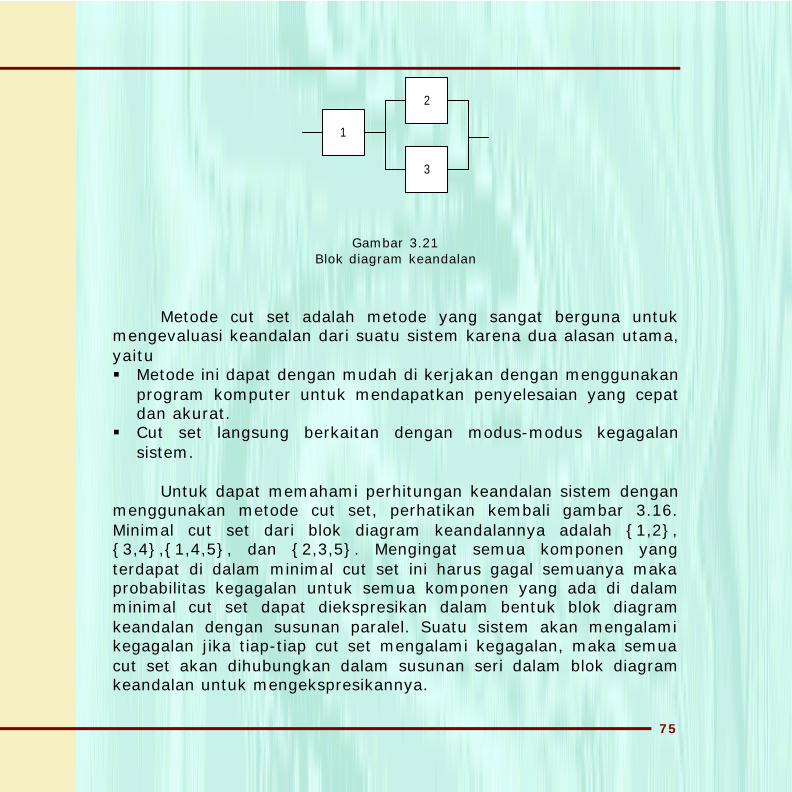
3.10 Metode Cut Set
Untuk memahami konsep cut set, perhatikan gambar blokdiagram keandalan dari suatu sistem seperti yang terlukis padagambar 3.21. Pada gambar 3.21, sebuah komponen di hubungkansecara seri dengan dua komponen lain yang telah dihubungkansecara paralel terlebih dahulu. Bila komponen 1 rusak maka akan

74
mengakibatkan sistem tidak berfungsi. Sistem tersebut juga tidakakan berfungsi jika komponen 2 dan 3 dalam keadaan rusak,komponen 1 dan 2 dalam keadaan rusak, komponen 1 dan 3 dalamkeadaan rusak, dan bila ketiga komponen dalam keadaan rusak. Bilakomponen-komponen yang sudah disebutkan di atas dikumpulkandalam sebuah himpunan (set) maka terbentuk himpunan yangberanggotakan komponen-komponen yang bila komponen-komponenitu dalam keadaan rusak akan menyebabkan sistem tidak berfungsi.Ini merupakan konsep dari cut set. Jadi cut set dapat didefinisikansebagai berikut.
Sebuah cut set adalah sekumpulan dari komponen yang bilakomponen-komponen itu mengalami kegagalan, maka akanmenyebabkan seluruh sistem akan mengalami kegagalan pula.
Sebuah cut set dikatakan sebagai minimal cut set bila salah satukomponen yang terdapat di dalam minimal cut set itu mengalamikegagalan, maka akan menyebabkan seluruh sistem akan mengalamikegagalan pula, tetapi bila salah satu komponen yang terdapat didalam mininimal cut set bekerja, maka tidak mengakibatkan sistemmenjadi gagal.
Cut set dari blok diagram keandalan pada gambar 3.21 adalah :{1}, {2,3}, {1,2}, {1,3}, dan {1,2,3}. Sedang minimal cut set dariblok diagram keandalan pada gambar 3.21 adalah : {1}, {2,3}.
75
3
2
1
Gambar 3.21Blok diagram keandalan
Metode cut set adalah metode yang sangat berguna untukmengevaluasi keandalan dari suatu sistem karena dua alasan utama,yaitu§ Metode ini dapat dengan mudah di kerjakan dengan menggunakan
program komputer untuk mendapatkan penyelesaian yang cepatdan akurat.
§ Cut set langsung berkaitan dengan modus-modus kegagalansistem.
Untuk dapat memahami perhitungan keandalan sistem denganmenggunakan metode cut set, perhatikan kembali gambar 3.16.Minimal cut set dari blok diagram keandalannya adalah {1,2},{3,4},{1,4,5}, dan {2,3,5}. Mengingat semua komponen yangterdapat di dalam minimal cut set ini harus gagal semuanya makaprobabilitas kegagalan untuk semua komponen yang ada di dalamminimal cut set dapat diekspresikan dalam bentuk blok diagramkeandalan dengan susunan paralel. Suatu sistem akan mengalamikegagalan jika tiap-tiap cut set mengalami kegagalan, maka semuacut set akan dihubungkan dalam susunan seri dalam blok diagramkeandalan untuk mengekspresikannya.
76
1 3
2
5 5
3
1
4
42
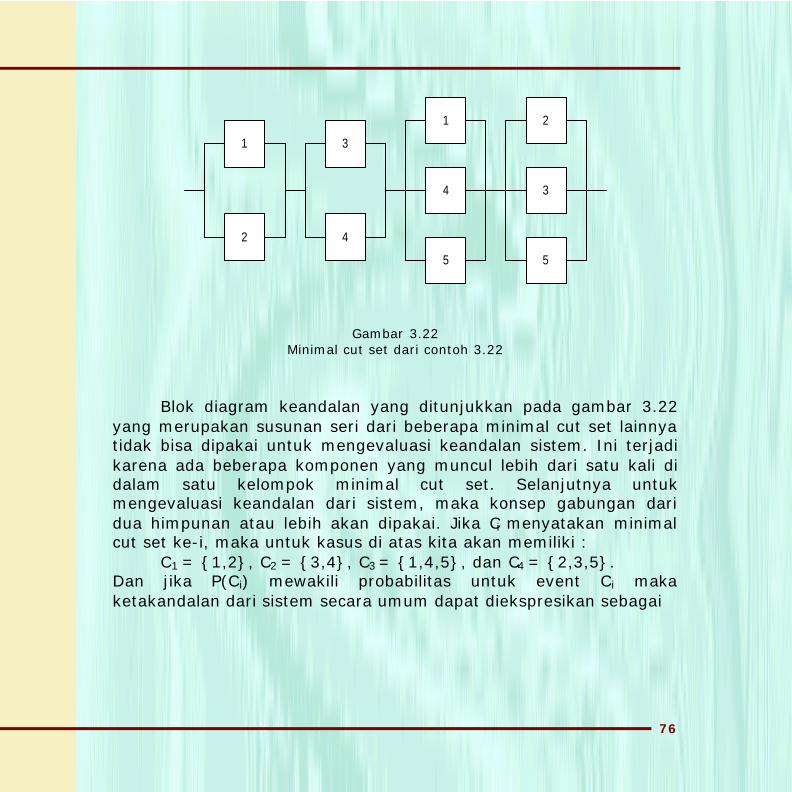
Gambar 3.22Minimal cut set dari contoh 3.22
Blok diagram keandalan yang ditunjukkan pada gambar 3.22yang merupakan susunan seri dari beberapa minimal cut set lainnyatidak bisa dipakai untuk mengevaluasi keandalan sistem. Ini terjadikarena ada beberapa komponen yang muncul lebih dari satu kali didalam satu kelompok minimal cut set. Selanjutnya untukmengevaluasi keandalan dari sistem, maka konsep gabungan daridua himpunan atau lebih akan dipakai. Jika Ci menyatakan minimalcut set ke-i, maka untuk kasus di atas kita akan memiliki :
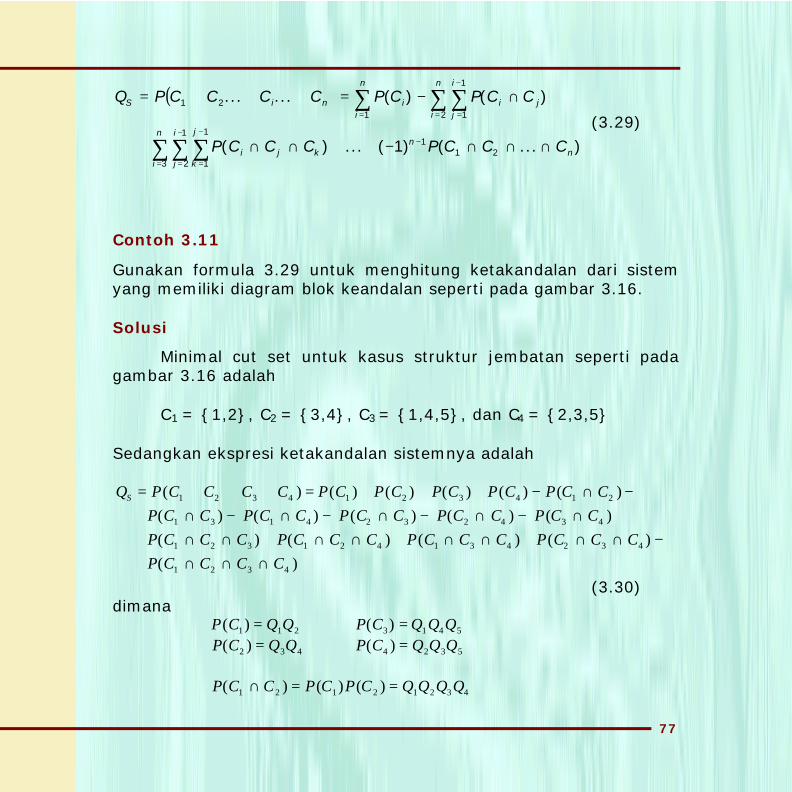
C1 = {1,2}, C2 = {3,4}, C3 = {1,4,5}, dan C4 = {2,3,5}.Dan jika P(Ci) mewakili probabilitas untuk event Ci makaketakandalan dari sistem secara umum dapat diekspresikan sebagai
77
( )
∑∑ ∑
∑ ∑ ∑
=
−
=
−
=
−
= =
−
=
∩∩∩−++∩∩+
∩−=∪∪∪=
n
i
i
j
j
kn
nkji
n
i
n
i
i
jjiiniS
CCCPCCCP
CCPCPCCCCPQ
3
1
2
1
121
1
1 2
1
121
) ... ()1( ... )(
)()(......
(3.29)
Contoh 3.11
Gunakan formula 3.29 untuk menghitung ketakandalan dari sistemyang memiliki diagram blok keandalan seperti pada gambar 3.16.
Solusi
Minimal cut set untuk kasus struktur jembatan seperti padagambar 3.16 adalah
C1 = {1,2}, C2 = {3,4}, C3 = {1,4,5}, dan C4 = {2,3,5}
Sedangkan ekspresi ketakandalan sistemnya adalah
Q P C C C C P C P C P C P C P C C
P C C P C C P C C P C C P C C
P C C C P C C C P C C C P C C C
P
S = ∪ ∪ ∪ = + + + − ∩ −∩ − ∩ − ∩ − ∩ − ∩ +∩ ∩ + ∩ ∩ + ∩ ∩ + ∩ ∩ −
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1 2 3 4 1 2 3 4 1 2
1 3 1 4 2 3 2 4 3 4
1 2 3 1 2 4 1 3 4 2 3 4
( )C C C C1 2 3 4∩ ∩ ∩(3.30)
dimanaP C Q Q( )1 1 2= P C Q Q Q( )3 1 4 5=P C Q Q( )2 3 4= P C Q Q Q( )4 2 3 5=
P C C P C P C Q Q Q Q( ) ( ) ( )1 2 1 2 1 2 3 4∩ = =
78
P C C P C P C Q Q Q Q( ) ( ) ( )1 3 1 3 1 2 4 5∩ = =P C C P C P C Q Q Q Q( ) ( ) ( )1 4 1 4 1 2 3 5∩ = =P C C P C P C Q Q Q Q( ) ( ) ( )2 3 2 3 1 3 4 5∩ = =P C C P C P C Q Q Q Q( ) ( ) ( )2 4 2 4 2 3 4 5∩ = =P C C P C P C Q Q Q Q Q( ) ( ) ( )3 4 3 4 1 2 3 4 5∩ = =
P C C C P C C C P C C C
P C C C P C C C C
Q Q Q Q Q
( ) ( ) ( )
( ) ( )1 2 3 1 2 4 1 3 4
2 3 4 1 2 3 4
1 2 3 4 5
∩ ∩ = ∩ ∩ = ∩ ∩= ∩ ∩ = ∩ ∩ ∩=
Jadi, ketakandalan dari sistem adalah
Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q Q
Q Q Q Q Q Q Q Q QS = + + + − − −
− +1 2 3 4 1 4 5 2 3 5 1 2 3 4 1 2 4 5 1 3 4 5
2 3 4 5 1 2 3 4 52 (3.31)
Dengan mengambil nilai keandalan untuk masing-masing komponendari contoh soal nomor 1 yaitu R R R R R R1 2 3 4 5 0 95= = = = = = , , maka
kita akan memeperoleh nilai-nilai ketakandalan dari masing-masingkomponen adalahQ Q Q Q Q Q1 2 3 4 5 0 05= = = = = = , .
Ketakandalan dari sistem akan menjadi
005219,0 05,0205,0505,0205,02
25225432
5432
=×+×−×+×=
+−+= QQQQQS
Sedang keandalan dari sistem
79
994781,01 =−= SS QR
Sama dengan hasil yang diperoleh pada contoh soal pertama. o
Perhitungan keandalan dan ketakandalan dari sistem baikdengan memakai pendekatan probabilitas bersyarat dan metode cutset sama-sama menghasilkan hasil yang presisi. Untuk sistem yangmemiliki struktur yang lebih komplek dan jumlah komponen yanglebih banyak, kedua metode perhitungan keandalan yang sudahdiuraikan secar teoritis dapat dipakai untuk melakukan perhitungan.Kendala yang dihadapi hanya waktu yang diperlukan untukmenyelesaikan perhitungan itu sangat lama dan melelahkan.Perhitungan keandalan dengan pendekatan akan mempercepatpenyelesaian meski dengan tingkat presisi yang lebih rendah. Tingkatkesalahan (error) yang dibuat dengan metode pendekatan ini masihdalam batas-batas yang masih dapat di terima.
Untuk melakukan perhitungan keandalan dengan metodependekatan ada dua harga yang akan diperoleh. Harga-harga ituadalah batas atas (upper bound) dan batas bawah (lower bound) dariketakandalan sistem yang dievaluasi. Upper bound dari ketakandalansuatu sistem dapat dihitung dengan mengambil kelompok pertamadari persamaan (3.29) dan lower bound dari ketakandalan suatusistem dapat dihitung dengan mengambil kelompok pertama dankedua dari persamaan (3.29).
Formula upper bound dari ketakandalan sistem adalah
∑=
=n
iiS CPQ
1boundUpper )( (3.32)
Sedang formula untuk lower bound dari ketakandalan sistem adalah
80
∑ ∑∑= =
−
=
∩−=n
i
n
i
i
jjiiS CCPCPQ
1 2
1
1
)()( (3.33)
Contoh 3.12
Dengan menggunakan persamaan (3.32) dan (3.34), hitungkeandalan dari sistem yang memiliki blok diagram keandalan sepertiyang ditunjukkan pada gambar 3.16. Bandingkan nilai keandalanyang diperoleh dengan memakai metode pendekatan ini dan nilaikeandalan yang telah dihitung pada contoh 3.11.
SolusiDengan mengambil nilai keandalan untuk masing-masing komponendari contoh soal 3.10 yaitu R R R R R R1 2 3 4 5 0 95= = = = = = , , maka kita
akan memeperoleh nilai-nilai ketakandalan dari masing-masingkomponen adalah
Q Q Q Q Q Q1 2 3 4 5 0 05= = = = = = , .
Dengan demikianP C Q Q Q( )1 1 2
2= = P C Q Q Q Q( )3 1 4 53= =
P C Q Q Q( )2 3 42= = P C Q Q Q Q( )4 2 3 5
3= =
P C C P C P C Q Q Q Q Q( ) ( ) ( )1 2 1 2 1 2 3 44∩ = = =
P C C P C P C Q Q Q Q Q( ) ( ) ( )1 3 1 3 1 2 4 54∩ = = =
P C C P C P C Q Q Q Q Q( ) ( ) ( )1 4 1 4 1 2 3 54∩ = = =
P C C P C P C Q Q Q Q Q( ) ( ) ( )2 3 2 3 1 3 4 54∩ = = =
P C C P C P C Q Q Q Q Q( ) ( ) ( )2 4 2 4 2 3 4 54∩ = = =
P C C P C P C Q Q Q Q Q Q( ) ( ) ( )3 4 3 4 1 2 3 4 55∩ = = =
81
Sehingga upper bound ketakandalan dari sistem adalah
00525,005,0205,0222 3232boundUpper =×+×=+= QQQS
dan nilai keandalan dari sistem adalah = 1 - 0,00525 = 0,99475.Nilai ketakandalan dari sistem dengan menggunakan pendekatanupper bound adalah 0,59% lebih tinggi dari nilai ketakandalan sistemyang sebenarnya yaitu 0,005219. Sedangkan keandalan sistemnyaadalah 0,003% lebih rendah dari nilai keandalan sistem yangsebenarnya.
Lower bound ketakandalan dari sistem adalah
005218,0 05,005,0505,0205,02522 54325432
boundLower
=−×−×+×=−−+= QQQQQS
dan nilai keandalan dari sistem itu adalah = 1 - 0,005218 =0,994782.Nilai ketakandalan dari sistem dengan menggunakan pendekatanlower bound adalah 0,02% lebih rendah dari nilai ketakandalansistem yang sebenarnya yaitu 0,005219. Sedangkan keandalansistemnya adalah 0,0001% lebih tinggi dari nilai keandalan sistemyang sebenarnya. q
Dari uraian di atas jelas terlihat bahwa tingkat kesalahan relatif hasilperhitungan keandalan dan ketakandalan sistem dengan memakaimetode perhitungan masih dalam batas-batas yang wajar.
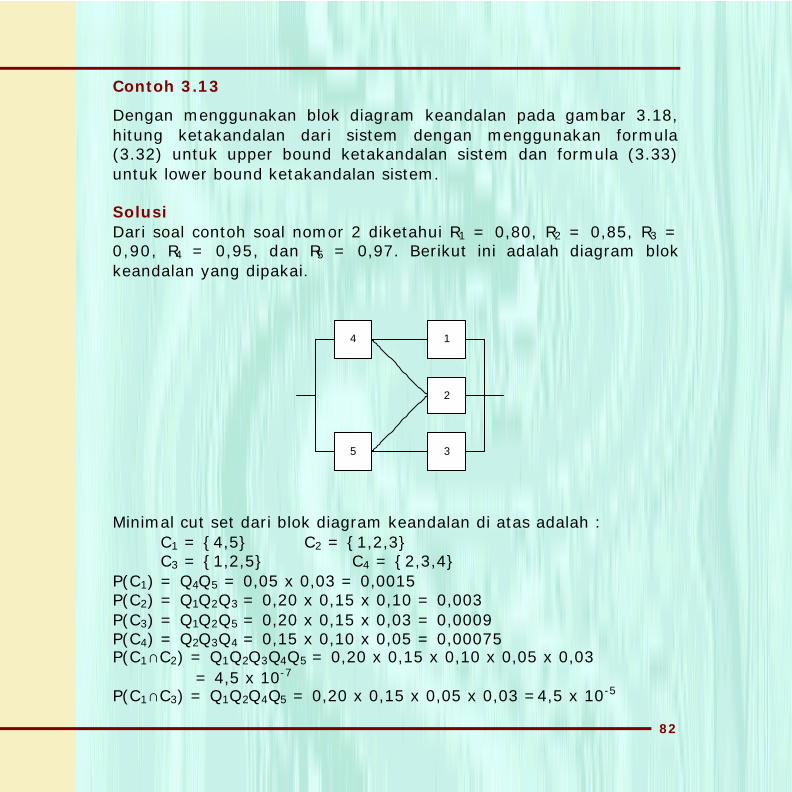
82
Contoh 3.13
Dengan menggunakan blok diagram keandalan pada gambar 3.18,hitung ketakandalan dari sistem dengan menggunakan formula(3.32) untuk upper bound ketakandalan sistem dan formula (3.33)untuk lower bound ketakandalan sistem.
SolusiDari soal contoh soal nomor 2 diketahui R1 = 0,80, R2 = 0,85, R3 =0,90, R4 = 0,95, dan R5 = 0,97. Berikut ini adalah diagram blokkeandalan yang dipakai.
4
5 3
2
1
Minimal cut set dari blok diagram keandalan di atas adalah :C1 = {4,5} C2 = {1,2,3}C3 = {1,2,5} C4 = {2,3,4}
P(C1) = Q4Q5 = 0,05 x 0,03 = 0,0015P(C2) = Q1Q2Q3 = 0,20 x 0,15 x 0,10 = 0,003P(C3) = Q1Q2Q5 = 0,20 x 0,15 x 0,03 = 0,0009P(C4) = Q2Q3Q4 = 0,15 x 0,10 x 0,05 = 0,00075P(C1∩C2) = Q1Q2Q3Q4Q5 = 0,20 x 0,15 x 0,10 x 0,05 x 0,03
= 4,5 x 10-7
P(C1∩C3) = Q1Q2Q4Q5 = 0,20 x 0,15 x 0,05 x 0,03 =4,5 x 10-5
83
P(C1∩C4) = Q2Q3Q4Q5 = 0,15 x 0,10 x 0,05 x 0,03 = 2,25 x 10-7
P(C2∩C3) = Q1Q2Q3Q5 = 0,20 x 0,15 x 0,10 x 0,03 = 9 x 10-5
P(C2∩C4) = Q1Q2Q3Q4 = 0,20 x 0,15 x 0,10 x 0,05 = 1,5 x 10-4
P(C3∩C4) = Q1Q2Q3Q4Q5 = 0,20 x 0,15 x 0,10 x 0,05 x 0,03 = 4,5 x 10-7
Upper bound ketakandalan sistem adalah
QS = P(C1) + P(C2) + P(C3) + P(C4) = 6,15 x 10-3
Lower bound ketakandalan sistem adalah
QS = P(C1) + P(C2) + P(C3) + P(C4) - P(C1∩C2) - P(C1∩C3) – P(C1∩C4) - P(C2∩C3) - P(C2∩C4) - P(C3∩C4) = 5,86 x 10-3 o
3.11 Metode Tie set
Metode tie set adalah merupakan komplemen dari metode cutset. Metode ini digunakan dengan frekuensi yang lebih sedikit, karenasecara praktis metode ini tidak secara langsung mengarah ke modekegagalan dari sistem. Metode ini mempunyai aplikasi yang khususdan sehingga metode ini tidak didiskusikan didiskusikan dengan rinci.
Tie set adalah jalur minimal dari sistem dan oleh karena itu tieset merupakan sekumpulan komponen yang ada pada sistem yangdihubungkan secara seri. Akibatnya, sebuah tie set dikatakan gagaljika salah satu komponen didalamnya gagal dan probabilitas ini dapatdihitung mengunakan prinsip dari sistem seri. Oleh karena itu agarsistem mengalami kegagalan, seluruh tie set harus gagal dan olehkarena itu seluruh tie set secara efektif akan dihubugkan secaraparalel. Dengan menggunakan konsep ini diagram tie set untukmodel gambar 3.16 ditunjukan dalam gambar 3.23.
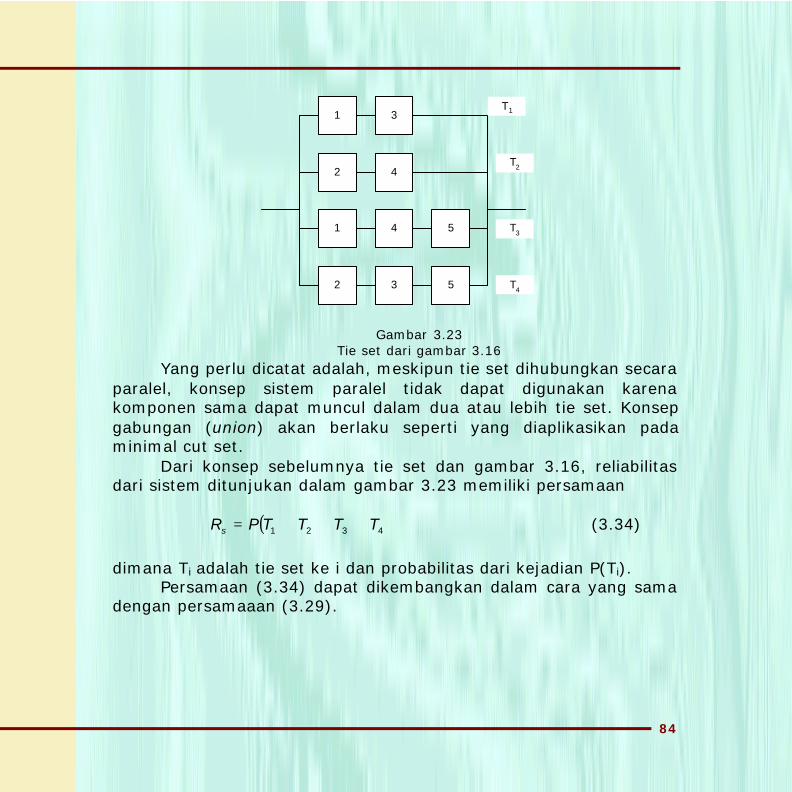
84
1
2
2
5
53
1 4
4
3T1
T2
T4
T3
Gambar 3.23Tie set dari gambar 3.16
Yang perlu dicatat adalah, meskipun tie set dihubungkan secaraparalel, konsep sistem paralel tidak dapat digunakan karenakomponen sama dapat muncul dalam dua atau lebih tie set. Konsepgabungan (union) akan berlaku seperti yang diaplikasikan padaminimal cut set.
Dari konsep sebelumnya tie set dan gambar 3.16, reliabilitasdari sistem ditunjukan dalam gambar 3.23 memiliki persamaan
( )4321 TTTTPRs ∪∪∪= (3.34)
dimana Ti adalah tie set ke i dan probabilitas dari kejadian P(Ti).Persamaan (3.34) dapat dikembangkan dalam cara yang sama
dengan persamaaan (3.29).
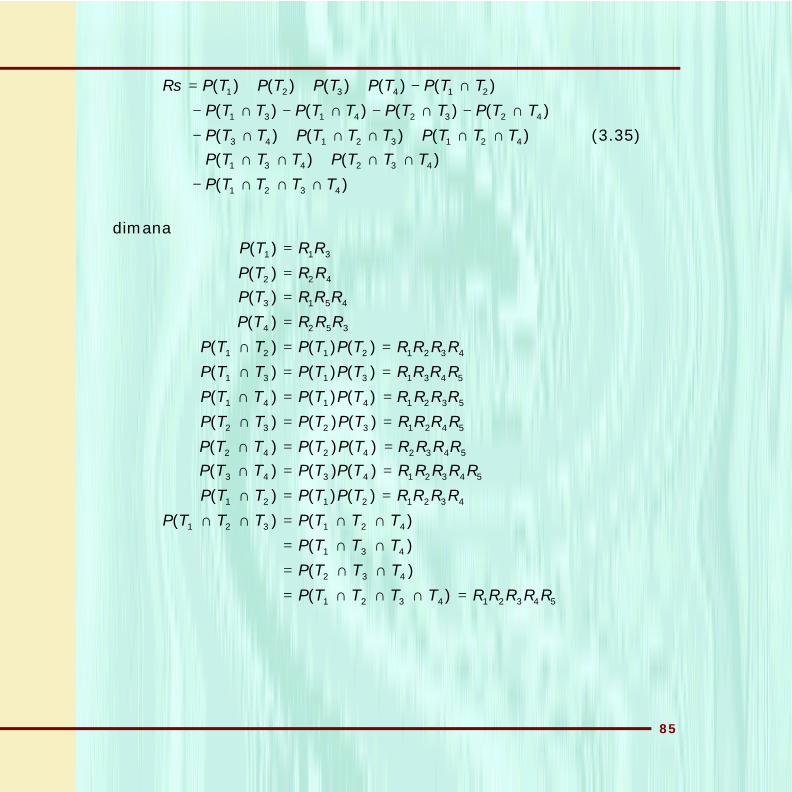
85
)(
)()()()()(
)()()()(
)()()()()(
4321
432431
42132143
42324131
214321
TTTTP
TTTPTTTPTTTPTTTPTTP
TTPTTPTTPTTP
TTPTPTPTPTPRs
∩∩∩−∩∩+∩∩+
∩∩+∩∩+∩−∩−∩−∩−∩−
∩−+++=
(3.35)
dimana
543214321
432
431
421321
43212121
543214343
54324242
54213232
53214141
54313131
43212121
3524
4513
422
311
)(
)(
)(
)()(
)()()(
)()()()()()(
)()()(
)()()(
)()()(
)()()(
)(
)()(
)(
RRRRRTTTTP
TTTP
TTTP
TTTPTTTP
RRRRTPTPTTP
RRRRRTPTPTTPRRRRTPTPTTP
RRRRTPTPTTP
RRRRTPTPTTP
RRRRTPTPTTP
RRRRTPTPTTP
RRRTP
RRRTPRRTP
RRTP
=∩∩∩=∩∩=∩∩=∩∩=∩∩==∩==∩==∩==∩==∩==∩==∩
====
86
Persamaan (3.35) memberikan indeks keandalan dari sistem. Jika R1
= R2 =R3=R4=R5=R, persamaan (3.35) akan berubah menjadi
5432 2522 RRRRRs +−+=
Satu kekurangan dari tie set adalah persamaan (3.35) tidakdapat dipakai untuk menurunkan persamaan pendekatan untukmengevaluasi indeks keandalan sistem. Hal ini disebabkan, karenasecara umum nilai dari R adalah sangat tinggi sehingga hasilpendekatan yang dilakukan akan memiliki tingkat kesalahan yangcukup besar.
87
3.12 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. Henley, E.J. and Hiromitsu Kumamoto [1992], Probabilistic RiskAssessment : reliability Engineering, Design, and Analysis, IEEEPress, New York.
3. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
4. Kececioglu, D. [1991], Reliability Engineering Handbooks Volume2, Prentice Hall, Englewood Cliffs, New Jersey.
5. Ramakumar, R [1993]., Engineering Reliability : Fundamentalsand Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 1
KEANDALAN DAN PERAWATAN
Metode PengkajianKeandalanBagian 1
OlehIr. Dwi Priyanta, MSE
JURUSAN TEKNIK SISTEM PERKAPALANFAKULTAS TEKNOLOGI KELAUTANINSTITUT TEKNOLOGI SEPULUH NOPEMEBERSURABAYA
© Copyright ada pada penulis
MODUL2
DAFTAR ISI MODUL 2
BAB 4 Pengantar Analisa Resiko4.1 Pendahuluan4.2 Studi Resiko Fase I : Pendefinisian Sistem dan Preliminary Hazard
Analysis4.2.1 Preliminary Hazard Analysis (PHA)4.3 Studi Resiko Fase II : Identifikasi Urutan Kecelakaan4.4 Studi Resiko Fase III : Consequence Analysis4.5 Referensi dan Bibliografi
BAB 5 Fault Tree Analysis (FTA) dan Failure Modes andEffects Analysis (FMEA)
5.1 Pendahuluan5.2 Kegagalan (Failure)5.3 Fault Tree Analysis5.3.1 Definisi Problem dan Kondisi Batas5.3.2 Pengkonstruksian Fault Tree5.3.3 Pengidentifikasian Minimal Cut Set5.3.4 Evaluasi Kualitatif Fault Tree5.3.5 Evaluasi Kuantitatif Fault Tree5.4 Failure Modes and Effects Analysis (FMEA)5.5 Referensi dan Bibliografi
KEMBALI KE MENU UTAMA
FOR INTERNAL USE ONLY
1
Pengantar Analisa Resiko
4.1 Pendahuluan
Terminologi dan pengertian keandalan (reliability), kese-lamatan (safety), bahaya (hazard) dan resiko (risk) seringkalitumpang tindih. Terminologi keselamatan atau analisa resiko (riskanalysis) memiliki makna yang sama sehingga kedua terminologi inidapat digunakan saling bertukaran satu dengan yang lain. Keduaterminologi ini, seperti halnya analisa keandalan (reliability analysis)merujuk pada studi pada proses kerja atau kegagalan peralatan sertapengoperasiannya. Jika tujuan dari studi adalah untuk menentukanparameter keselamatan (safety parameter), perlu kiranya untukmempertimbangkan kemungkinan kerusakan yang terjadi pada atauyang disebabkan oleh sistem. Jika fase dari studi menyarankanbahwa ada kemungkinan sistem mengalami kegagalan maka studiresiko (risk study) akan dilakukkan untuk menentukan dampakkegagalan dalam kerangka kemungkinan kerusakan terhadap propertiatau terhadap manusia.
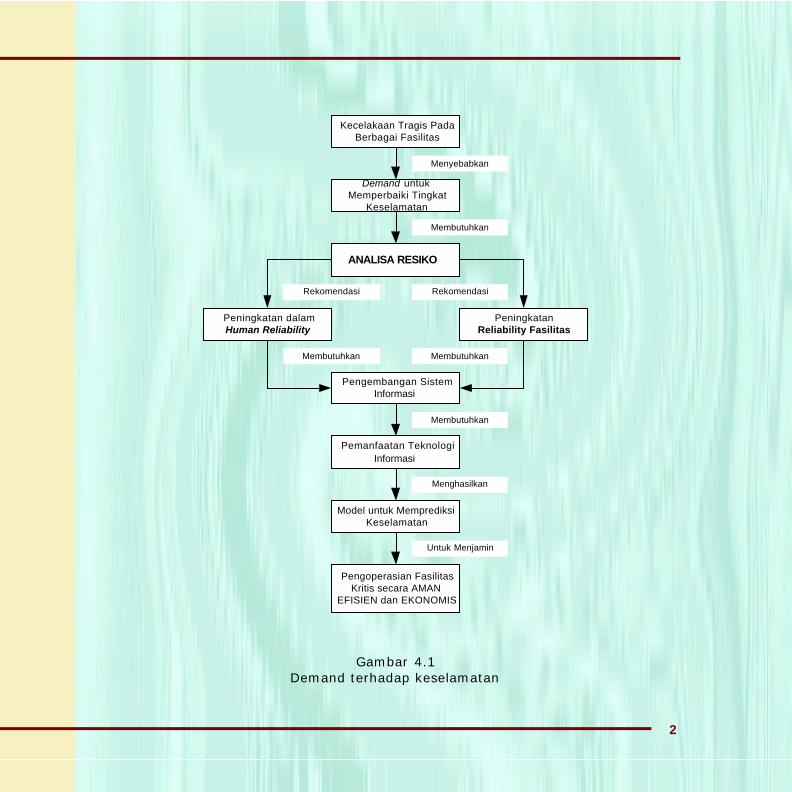
2
Menyebabkan
Kecelakaan Tragis PadaBerbagai Fasilitas
Demand untukMemperbaiki Tingkat
Keselamatan
Membutuhkan
ANALISA RESIKO
Peningkatan dalam Human Reliability
PeningkatanReliability Fasilitas
MembutuhkanMembutuhkan
RekomendasiRekomendasi
Pengembangan SistemInformasi
Membutuhkan
Pemanfaatan TeknologiInformasi
Model untuk MemprediksiKeselamatan
Pengoperasian FasilitasKritis secara AMAN
EFISIEN dan EKONOMIS
Menghasilkan
Untuk Menjamin
Gambar 4.1Demand terhadap keselamatan
3
Sebuah contoh dari analisa keandalan adalah tentang analisaseberapa sering sebuah reaktor kimia mengalami panas yangberlebihan (overheat) karena pompa, heat exchanger, operator,sistem kontrol, dan berbagai perlengkapan dan peralatan lainmengalami malfungsi. Jika studi ini diperluas dengan melibatkankajian seberapa sering terjadinya penyimpangan temperatur yangdapat menyebabkan terjadinya ledakan, maka kita akan melihatmasalah keselamatan atau bahaya. Untuk menyimpulkan studikeselamatan yang dilakukan untuk permasalahan di atas, kita harusmelakukan verivikasi bahwa reaktor kimia tidak akan mengalamipanas yang berlebihan, tidak ada perlengkapan dan peralatan yangmengalami kegagalan karena faktor-faktor diluar design envelope.
Jika analisa ledakan reaktor diperluas dengan melibatkansejumlah dampak – dampak berikut frekuensi terjadinya dampak –dampak tersebut, maka anlisa resiko telah rampung. Karena Salahsatu tujuan dari analisa resiko adalah untuk menentukan probabilitasseberapa sering resiko ini terjadi dan berbagai kemungkinan dampakdari kegagalan sistem. Sebagai contoh, dampak dari ledakan yangmerupakan akibat dari penyimpangan temperatur reaktor mungkindapat berupa cedera ringan yang disebabkan oleh pecahan – pecahanbagian reaktor atau berupa bencana mayor karena terjadinyakebakaran.
Dengan semakin banyaknya kecelakaan dan musibah yangmenimpa mulai dari meledaknya pesawat Challanger (1986),kecelakaan pesawat penerbangan komersial, kecelakaan reaktornuklir (Three Mile Island 1979, Chernobyl 1986), kecelakaan padaproses pengolahan (Bhopal 1984), serta berbagai kecelakaan lainyang menimpa industri maritim beserta damapak dari kecelakaan danmusibah tersebut terhadap lingkungan, telah mendorong berbagaipihak untuk meningkatkan tingkat keselamatan serta mengurangiresiko yang mungkin terjadi akibat terjadinya satu kecelakaan padaberbagai fasilitas yang kritis. Gambar 4.1 menunjukkan diagram yangmelatar belakangi perlunya meningkatkan keselamatan berbagai
4
fasilitas yang kritis yang mungkin memberikan dampak yang sangatburuk baik secara ekonomis, keselamatan maupun dampakterhadapa lingkungan bila sampai terjadi kecelakaan pada fasilitaskritis tersebut.
Pada seksi berikutnya akan dibahas berbagai metode – metodeuntuk analisa resiko secara garis besar. Bagi para pembaca yangtertarik untuk mendalami analisa resiko lebih jauh, pembacadisarankan untuk merujuk pada beberapa literatur yang dipakai padamodul ini atau beberapa literatur lain.
4.2 Studi Resiko Fase I : Pendefinisian Sistem dan PreliminaryHazard Analysis
Resiko timbul karena terlepasnya energi atau material beracunlain yang tidak terkontrol. Pada umumnya bagian – bagian tertentudari sebuah plant lebih berbahaya bila dibandingkan dengan bagianlainnya, oleh karena itu, tahap awal dalam analisa adalah memecahplant menjadi subsistem untuk menetukan seksi – seksi ataukomponen –komponen yang kemungkinan besar merupakan sumber– sumber pelepasan yang tidak terkontrol. Berikut ini dua langkahpertama yang harus dilakukan:
Langkah 1 Identifikasi berbagai bahaya (Hazard)yangtimbul.
( Apakah itu berupa sebuah kebicirangas beracun,sebuah ledakan, kebakaran atau hal lainnya)
Langkah 2 Identifikasi bagian bagian dari sistem yangdapat meningkatkan keadaan bahaya.
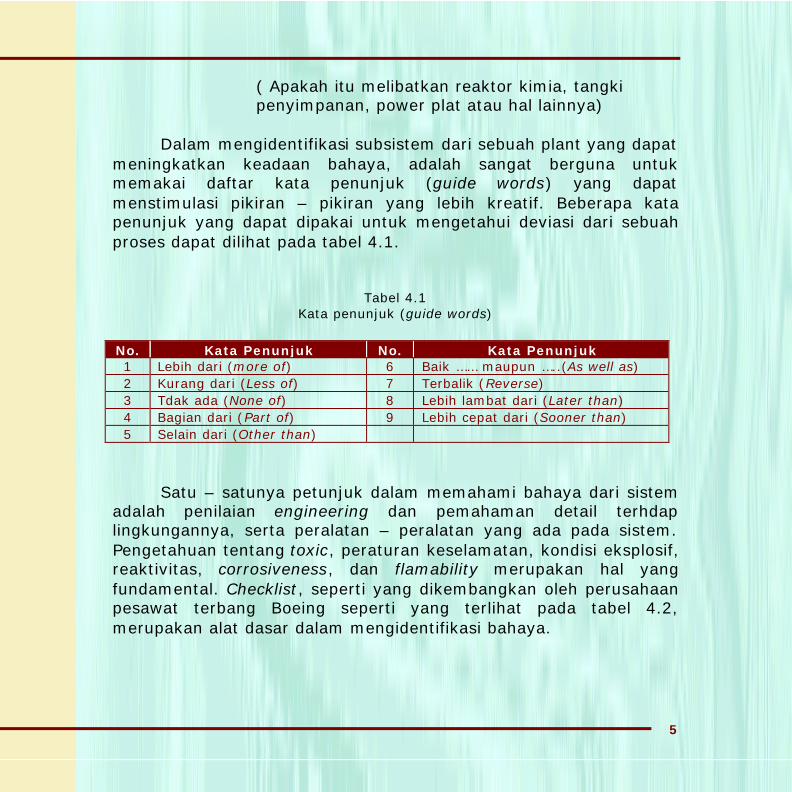
5
( Apakah itu melibatkan reaktor kimia, tangkipenyimpanan, power plat atau hal lainnya)
Dalam mengidentifikasi subsistem dari sebuah plant yang dapatmeningkatkan keadaan bahaya, adalah sangat berguna untukmemakai daftar kata penunjuk (guide words) yang dapatmenstimulasi pikiran – pikiran yang lebih kreatif. Beberapa katapenunjuk yang dapat dipakai untuk mengetahui deviasi dari sebuahproses dapat dilihat pada tabel 4.1.
Tabel 4.1Kata penunjuk (guide words)
No. Kata Penunjuk No. Kata Penunjuk1 Lebih dari (more of) 6 Baik …… maupun …..(As well as)2 Kurang dari (Less of) 7 Terbalik (Reverse)3 Tdak ada (None of) 8 Lebih lambat dari (Later than)4 Bagian dari (Part of) 9 Lebih cepat dari (Sooner than)5 Selain dari (Other than)
Satu – satunya petunjuk dalam memahami bahaya dari sistemadalah penilaian engineering dan pemahaman detail terhdaplingkungannya, serta peralatan – peralatan yang ada pada sistem.Pengetahuan tentang toxic, peraturan keselamatan, kondisi eksplosif,reaktivitas, corrosiveness, dan flamability merupakan hal yangfundamental. Checklist, seperti yang dikembangkan oleh perusahaanpesawat terbang Boeing seperti yang terlihat pada tabel 4.2,merupakan alat dasar dalam mengidentifikasi bahaya.
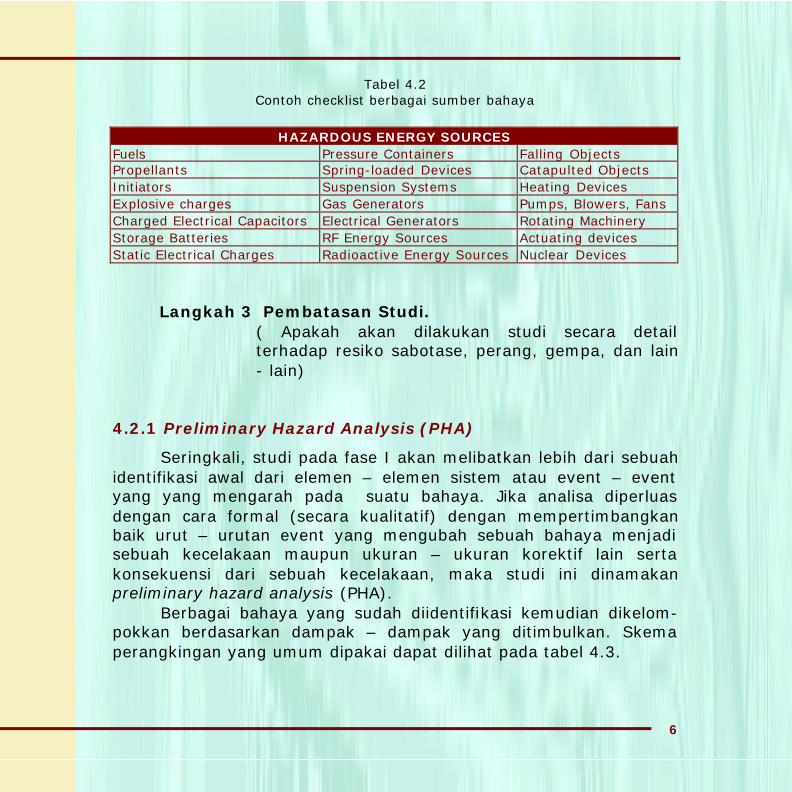
6
Tabel 4.2Contoh checklist berbagai sumber bahaya
HAZARDOUS ENERGY SOURCESFuels Pressure Containers Falling ObjectsPropellants Spring-loaded Devices Catapulted ObjectsInitiators Suspension Systems Heating DevicesExplosive charges Gas Generators Pumps, Blowers, FansCharged Electrical Capacitors Electrical Generators Rotating MachineryStorage Batteries RF Energy Sources Actuating devicesStatic Electrical Charges Radioactive Energy Sources Nuclear Devices
Langkah 3 Pembatasan Studi.( Apakah akan dilakukan studi secara detailterhadap resiko sabotase, perang, gempa, dan lain- lain)
4.2.1 Preliminary Hazard Analysis (PHA)
Seringkali, studi pada fase I akan melibatkan lebih dari sebuahidentifikasi awal dari elemen – elemen sistem atau event – eventyang yang mengarah pada suatu bahaya. Jika analisa diperluasdengan cara formal (secara kualitatif) dengan mempertimbangkanbaik urut – urutan event yang mengubah sebuah bahaya menjadisebuah kecelakaan maupun ukuran – ukuran korektif lain sertakonsekuensi dari sebuah kecelakaan, maka studi ini dinamakanpreliminary hazard analysis (PHA).
Berbagai bahaya yang sudah diidentifikasi kemudian dikelom-pokkan berdasarkan dampak – dampak yang ditimbulkan. Skemaperangkingan yang umum dipakai dapat dilihat pada tabel 4.3.
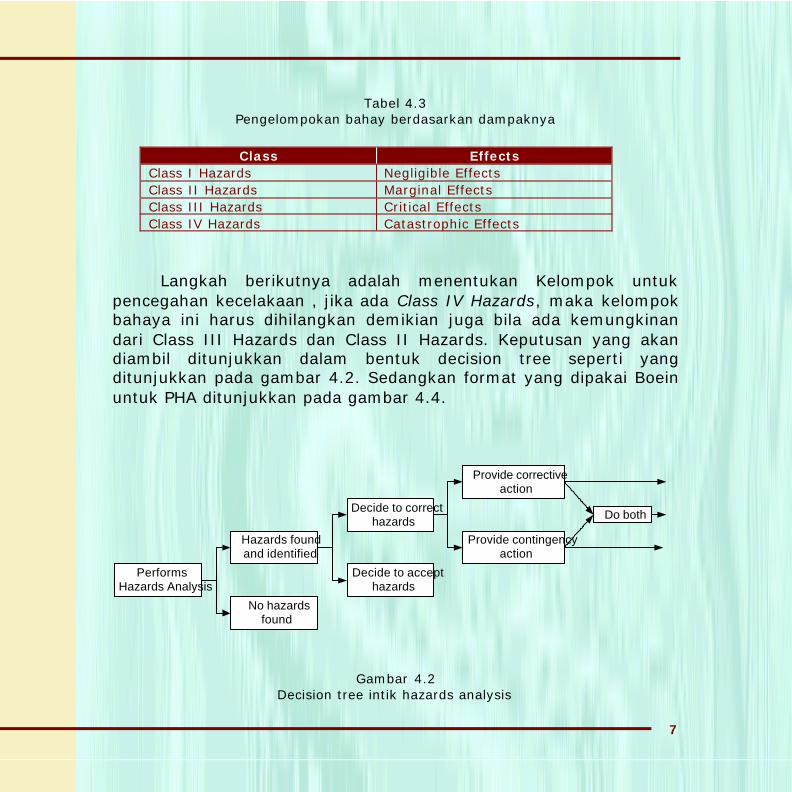
7
Tabel 4.3Pengelompokan bahay berdasarkan dampaknya
Class EffectsClass I Hazards Negligible EffectsClass II Hazards Marginal EffectsClass III Hazards Critical EffectsClass IV Hazards Catastrophic Effects
Langkah berikutnya adalah menentukan Kelompok untukpencegahan kecelakaan , jika ada Class IV Hazards, maka kelompokbahaya ini harus dihilangkan demikian juga bila ada kemungkinandari Class III Hazards dan Class II Hazards. Keputusan yang akandiambil ditunjukkan dalam bentuk decision tree seperti yangditunjukkan pada gambar 4.2. Sedangkan format yang dipakai Boeinuntuk PHA ditunjukkan pada gambar 4.4.
PerformsHazards Analysis
Hazards foundand identified
No hazardsfound
Decide to correcthazards
Decide to accepthazards
Provide correctiveaction
Provide contingencyaction
Do both
Gambar 4.2Decision tree intik hazards analysis
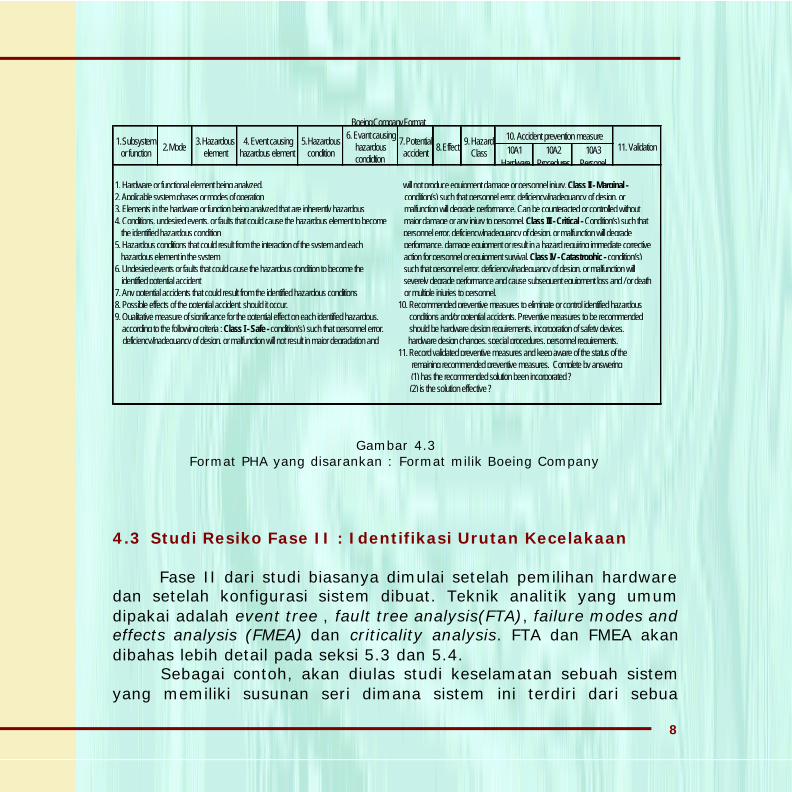
8
10A1 Hardware
10A2 Procedures
10A3 Personel
1. Hardware or functional element being analyzed. will not produce equipment damage or personnel injury. Class II - Marginal - 2. Applicable system phases or modes of operation condition(s) such that personnel error, deficiency/inadequancy of design, or 3. Elements in the hardware or function being analyzed that are inherently hazardous malfunction will degrade performance. Can be counteracted or controlled without4. Conditions, undesired events, or faults that could cause the hazardous element to become major damage or any injury to personnel. Class III - Critical - Condition(s) such that the identified hazardous condition personnel error, deficiency/inadequancy of design, or malfunction will degrade5. Hazardous conditions that could result from the interaction of the system and each performance, damage equipment or result in a hazard requiring immediate corrective hazardous element in the system action for personnel or equipment survival. Class IV - Catastrophic - condition(s) 6. Undesired events or faults that could cause the hazardous condition to become the such that personnel error, deficiency/inadequancy of design, or malfunction will identified potential accident severely degrade performance and cause subsequent equipment loss and / or death 7. Any potential accidents that could result from the identified hazardous conditions or multiple injuries to personnel.8. Possible effects of the potential accident, should it occur. 10. Recommended preventive measures to eliminate or control identified hazardous 9. Qualitative measure of significance for the potential effect on each identified hazardous, conditions and/or potential accidents. Preventive measures to be recommended according to the following criteria : Class I - Safe - condition(s) such that personnel error, should be hardware design requirements, incorporation of safety devices, deficiency/inadequancy of design, or malfunction will not result in major degradation and hardware design changes, special procedures, personnel requirements.
11. Record validated preventive measures and keep aware of the status of the remaining recommended preventive measures. Complete by answering (1) has the recommended solution been incorporated ? (2) is the solution effective ?
1. Subsystem or function
10. Accident prevention measure11. Validation
Boeing Company Format
5. Hazardous condition
4. Event causing hazardous element
3. Hazardous element2. Mode 9. Hazard
Class8. Effect7. Potential accident
6. Evant causing hazardous condidtion
Gambar 4.3Format PHA yang disarankan : Format milik Boeing Company
4.3 Studi Resiko Fase II : Identifikasi Urutan Kecelakaan
Fase II dari studi biasanya dimulai setelah pemilihan hardwaredan setelah konfigurasi sistem dibuat. Teknik analitik yang umumdipakai adalah event tree , fault tree analysis(FTA), failure modes andeffects analysis (FMEA) dan criticality analysis. FTA dan FMEA akandibahas lebih detail pada seksi 5.3 dan 5.4.
Sebagai contoh, akan diulas studi keselamatan sebuah sistemyang memiliki susunan seri dimana sistem ini terdiri dari sebua
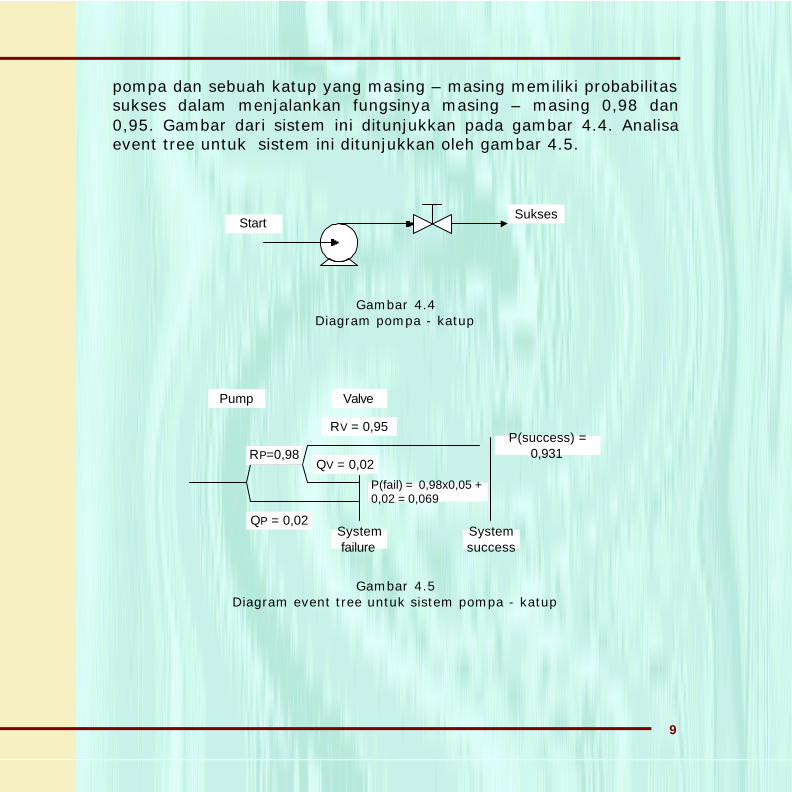
9
pompa dan sebuah katup yang masing – masing memiliki probabilitassukses dalam menjalankan fungsinya masing – masing 0,98 dan0,95. Gambar dari sistem ini ditunjukkan pada gambar 4.4. Analisaevent tree untuk sistem ini ditunjukkan oleh gambar 4.5.
StartSukses
Gambar 4.4Diagram pompa - katup
Pump Valve
RP=0,98
QP = 0,02
RV = 0,95
QV = 0,02
Systemfailure
Systemsuccess
P(success) =0,931
P(fail) = 0,98x0,05 +0,02 = 0,069
Gambar 4.5Diagram event tree untuk sistem pompa - katup
10
4.4 Studi Resiko Fase III : Consequence Analysis
Consequence analysis merupakan tahap akhir dari studi / analisaresiko. Salah satu metode yang dipakai adalah cause andconsequence analysis (CCA). Teknologi CCA CCA merupakan sebuahperkawinan fault tree (untuk menunjukkan penyebab) dan event tree(untuk menunjukkan akibat / consequence).
Prosedur untuk pengkonstruksian diagram CCA berawal daripemilihan sebuah inital event, yang kemudian event inidikembangkan lebih jauh dengan menjawab beberapa pertanyaanberikut ini.
§ Pada kondisi bagaimana event – event ini mengarah ke event– event lain yang lebih jauh ?
§ Apa kondisi alternatif plant yang dapat mengarah ke event –event yang berbeda ?
§ Komponen – komponen lain apa yang mempengaruhi eventini ? apakah event ini mempengaruhi lebih dari satukomponen ?
§ Event lain apa yang menyebabkan event ini ?
Gambar 4.6 menunjukkan tipikal dari sebuah diagram cause andconsequence analysis.
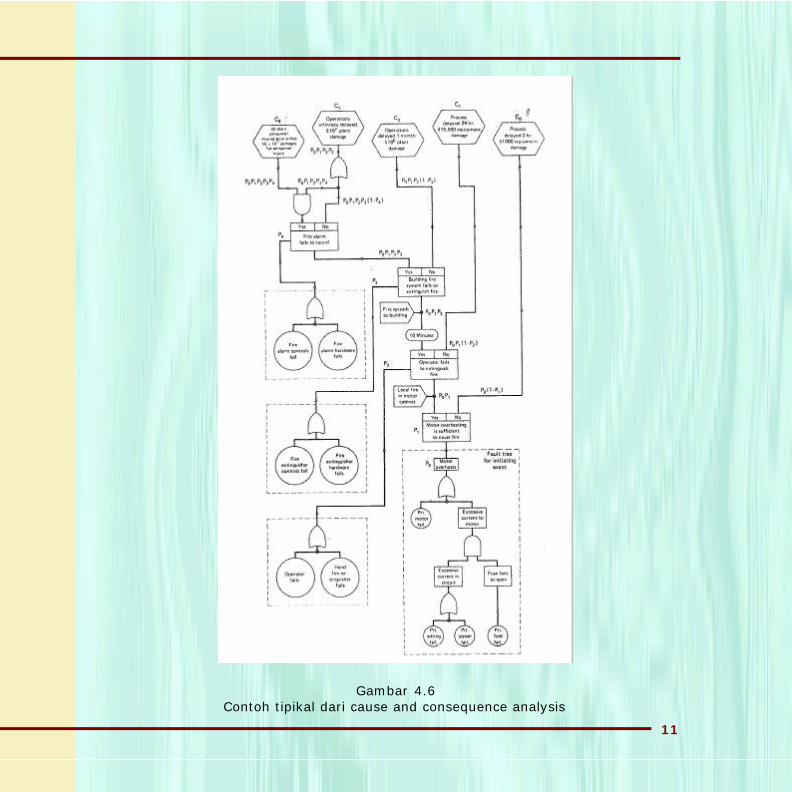
11
Gambar 4.6Contoh tipikal dari cause and consequence analysis
12
4.5 Referensi dan Bibliografi
1. Henley, E.J. and Hiromitsu Kumamoto [1992], Probabilistic RiskAssessment : reliability Engineering, Design, and Analysis, IEEEPress, New York.
2. Ruxton, T. [1997], “Formal Safety Assessment”, TransactionIMarE, Part 4.
KEMBALI KE DAFTAR ISI MODUL 2
13
Fault Tree Analysis (FTA)dan Failure Modes andEffects Analysis (FMEA)
5.1 Pendahuluan
Dalam situasi tertentu data untuk menganalisa keandalansecara kuantitatif tidak cukup atau mungkin tidak ada. Alternatifnya,kita masih bisa melakukan penilaian keandalan berdasarkan datayang ada secara kualitatif dan berdasarkan pengalaman. Dengananalisa kualitatif ini tidak berarti kesimpulan yang dihasilkan akantidak berharga. Jika analisa yang dilakukan berdasarkan analisa yangterstruktur, dapat ditelusuri sehingga dasar dari penilaian denganmenggunakan analisa yang terstruktur, dapat ditelusuri sehinggadasar dari penilaian secara kualitatif dapat pula dipakai. Bahkan, jikadata yang tersedia cukup untuk melakukan penilaian secara kualitatif.Analisa kualitatif yang sering dipakai untuk mengevaluasi keandalandari suatu sistem adalah analisa kegagalan.
Suatu sistem secara normal akan terdiri dari sejumlah blok-blokfungsional yang terkait sedemikian rupa sehingga sistem tersebutdapat menjalankan fungsinya. Terminologi “ blok fungsional” dapat
14
berupa sebuah komponen sampai sebuah subsistem tergantung darijenis sistem dan kondisi batas yang dipakai dalam menganalisa suatukasus. Hubungan struktural antara sistem dengan komponenmungkin bisa dilukiskan dengan berbagai cara. Semua pendekatanyang dipakai untuk melakukan pendekatan untuk mengevalusikegagalan dari suatu sistem adalah untuk mengilustrasikanbagaimana suatu sistem tertentu akan mengalami atau tidak akanmengalami kegagalan.
Ada berbagai teknik untuk mengevaluasi dan mengkajikegagalan sistem, baik secara kualitatif maupun secara kuantitatif.Pendekatan dan metodologi terbaik untuk mengecaluasi kegagalansistem tergantung dari beberapa faktor antara lain :
§ Tujuan dari studi yang akan dilakukan.§ Karakteristik sistem dan tata letak sistem§ Mode – mode kegagalan (failure modes) yang relevan§ Prosedur pengoperasian dan perawatan sistem
Berikut ini akan diulas dua metode yang banyak digunakanuntuk menganalisa kegagalan sistem. Kedua metode itu adalah FaultTree Analysis (FTA) dan Failure Modes and Effects Analysis (FMEA).FMEA dapat dikategorikan sebagai metode anlisa kualitatif,sedangkan FTA selain dapat digunakan untuk keperluan analisakegagalan kualitatif juga dapat digunakan untuk analisa kegagalansecara kuantitatif.
5.2 Kegagalan (Failure)
Kegagalan dapat didefinisikan sebagai terhentinya kemampuansuatu item – dapat berupa komponen sampai berupa satu sistem
15
yang kompleks – untuk menjalankan fungsinya. Kegagalan dari suatukomponen dapat diklasifikasikan menjadi tiga kelompok, yaitu :
§ Kegagalan primer (primary failure)§ Kegagalan sekunder (secondary failure)§ Kesalahan perintah (command faults)
Kegagalan primer dapat didefinisikan sebagai suatu komponenberada dalam keadaan rusak (non-working state) dimana komponentersebut memang diperhitungkan akan mengalami kegagalan,sehingga perlu diadakan aksi perbaikan agar komponen tersebutdapat kembali berada pada keadaan siap bekerja (working state).Kegagalan primer pada komponen akan terjadi pada design envelopedari komponen, dan penyebab dari kegagalan ini adalah umur darikomponen. Sebagai contoh kerusakan pada tangki karena kelelahanmaterial merupakan contoh dari kegagalan primer.
Kegagalan sekunder dapat dikatakan sama dengan kegagalanprimer kecuali kegagalan komponen terjadi diluar perhitungan. Stresyang berlebihan yang diterima komponen baik pada masa lalumaupun pada saat sekarang merupakan penyebab kegagalansekunder. Stres ini melibatkan amplitudo dari kondisi yang tidakdapat ditolrir, frekuensi, durasi, atau polaritas, dan input sumber –sumber energi termal, mekanikal elektrikal, kimia, magnetik, atauradioaktif. Stres ini disebabkan oleh komponen – komponen yang adadisekitar atau lingkungan disekitar komponen yang mengalamikegagalan, yang melibatkan kondisi meteorologi atau geologi, dansistem engineering yang lain. Personel, seperti operator daninspektor juga mungkin menybabkan terjadinya kegagalan sekunder,jika mereka merusakkan komponen. Perlu dicatat bahwa stres yangberlebihan pada komponen tidak akan menjamin komponen akankembali pada working-state seperti semula, karena stres yangdialami komponen akan meninggalkan kerusakan (memori) padakomponen yang direparasi.
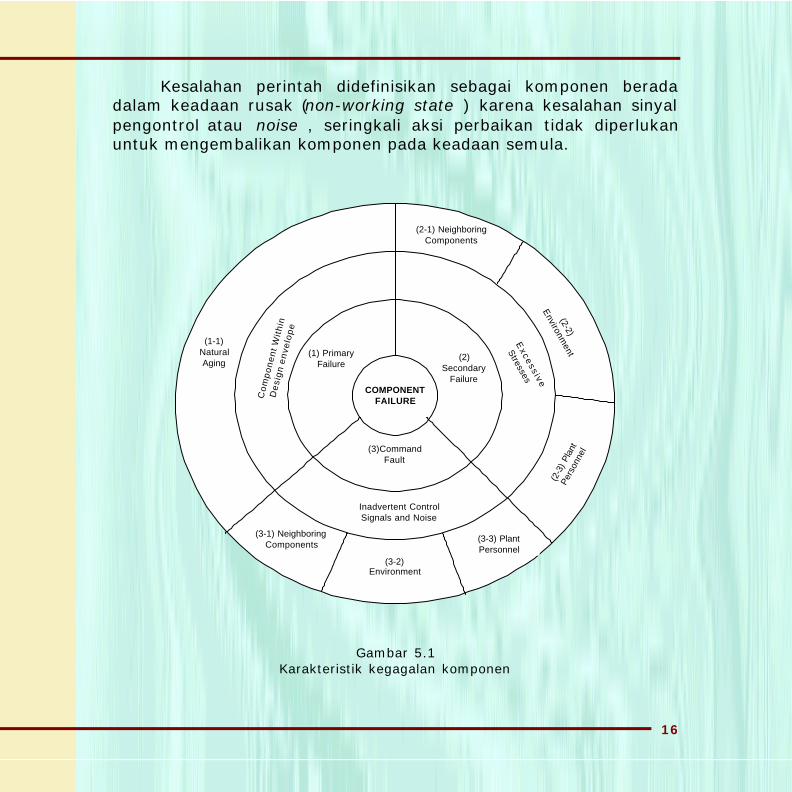
16
Kesalahan perintah didefinisikan sebagai komponen beradadalam keadaan rusak (non-working state ) karena kesalahan sinyalpengontrol atau noise , seringkali aksi perbaikan tidak diperlukanuntuk mengembalikan komponen pada keadaan semula.
COMPONENTFAILURE
(1) PrimaryFailure
(2)Secondary
Failure
(3)CommandFault
Exce
ss i ve
Stresses
Co
mp
on
en
t W
ith
inD
esi
gn
en
velo
pe
Inadvertent ControlSignals and Noise
(3-1) NeighboringComponents
(3-2)Environment
(3-3) PlantPersonnel
(1-1)NaturalAging
(2-1) NeighboringComponents
(2-2)
Environm
ent
(2-3
) P
lant
Per
sonn
el
Gambar 5.1Karakteristik kegagalan komponen
17
Gambar 5.1 menunjukkan karakteristik kegagalan dari sebuahkomponen. Lingkaran pertama yang mengelilingi lingkaran yangbertuliskan component failure menunjukkan bahwa kegagalankomponen diebabkan oleh (1) primary failure, (2) secondary failureatau (3) command faults. Berbagai penyebab yang mungkin dariketiga kategori kegagalan ini ditunjukkan oleh lingkaran terluar.
5.3 Fault Tree Analysis
Teknik untuk mengidentifikasikan kegagalan (failure) dari suatusistem dengan memakai FT (fault tree) diperkenalkan pertama kalipada tahun 1962 oleh Bell Telephone Laboratories dalam kaitannyadengan studi tentang evaluasi keselamatan sistem peluncuranminuteman misile antar benua. Boeing company memperbaiki teknikyang dipakai oleh Bell Telephone Laboratories dan memperkenalkanprogam komputer untuk melakukan analisa dengan memanfaatkanFT baik secara kualitatif maupun secara kuantitatif.
FTA (Fault Tree Analysis) berorientasi pada fungsi (function-oriented) atau yang lebih dikenal dengan “ top down “ approachkarena analisa ini berawal dari system level (top) dan meneruskannya kebawah. Titik awal dari analisa ini adalah pengidentifikasikanmode kegagalan fungsional pada top level dari suatu sistem atausubsistem.
FTA adalah teknik yang banyak dipakai untuk studi yangberkaitan dengan resiko dan keandalan dari suatu sistemengineering. Event potensial yang menyebabkan kegagalan darisuatu sistem engineering dan probabilitas terjadinya event tersebutdapat ditentukan dengan FTA. Sebuah TOP event yang merupakandefinisi dari kegagalan suatu sistem (system failure), harusditentukan terlebih dahulu dalam mengkonstrusikan FTA. Sistemkemudian dianalisa untuk menemukan semua kemungkinan yang
18
didefinesikan pada TOP event. FT adalah sebuah model grafis yangterdiri dari beberapa kombinasi kesalahan (fault) secara pararel dansecara berurutan yang mungkin menyebabkan awal dari failure eventyang sudah ditetapkan.
Setelah mengidentifikasi TOP event, event-event yang memberikontribusi secara langsung terjadinya top event diidentifikasi dandihubungkan ke TOP event dengan memakai hubungan logika (logicallink). Gerbang AND (AND gate) dan sampai dicapai event dasar yangidependent dan seragam (mutually independent basic event). Analisadeduktif ini menunjukan analisa kualitatif dan kuantitatif dari sistemengineering yang dianalisa.
Sebuah fault tree mengilustrasikan keadaan dari komponen-komponen sistem (basic event ) dan hubungan antara basic eventdan TOP event. Simbol grafis yang dipakai untuk menyatakanhubungan disebut gerbang logika (logika gate). Output dari sebuahgerbang logika ditentukan oleh event yang masuk kegerbangtersebut. Sebuah FTA secara umum dilakukan dalam 5 tahapan, yaitu
§ Mendefinisikan problem dan kondisi batas (boundarycondition) dari sistem
§ Pengkontruksian fault tree§ Mengidentifikasi minimal cut set atau minimal path set§ Analisa kualitatif dari fault tree§ Analisa kuantitatif fault tree
5.3.1 Definisi Problem dan Kondisi Batas
Aktivitas pertama dari fault tree analysis terdiri dari dua step,yaitu :
§ Mendefinisikan critical event yang akan dianalisa§ Mendefinisikan boundary condition untuk analisa
19
Critical event yang akan dianalisa secara normal disebut dengan TOPevent. Penting kiranya untuk bahwa TOP event harus didefinisikansecara jelas dan tidak kabur (unambiguous). Diskripsi dari TOP eventseharusnya selalu memberikan jawban terhadap pertanyaan apa(what), dimana (where), dan kapan (when).
WhatMendiskripsikan tipe dari critical event yang sedang terjadi, sebagaicontoh kebakaran (fire).WhereMendiskripsikan dimana critical event terjadi, sebagai contoh criticalevent terjadi di process oxidation reactor.WhenMendiskripsikan dimana critical event terjadi, sebagai contoh criticalevent terjadi pada saat pengoperasian normal.
Sebagai contoh TOP event yang melibatkan ketiga kriteria diatas adalah : “Kebakaran yang terjadi di process oxidation reactorpada saat pengoperasian normal”.
Agar analisis dapat dilakukan secara konsisten, adalah hal yangpenting bahwa kondisi batas bagi analisa didefinisikan secara hati –hati. Dari kondisi batas, kita akan memilliki beberpa pemahamansebagai berikut :
§ Batas fisik sistem.Bagian mana dari sistem yang akan dimasukkan dalamanalisa dan bagian mana yang tidak ?
§ Kondisi awal.Kondisi pengoperasian sistem yang bagaimana pada saatTOP event terjadi ? Apakah sistem bekerja pada kapasitasyang penuh / sebagaian ?
§ Kondisi batas yang berhubungan dengnan stres eksternal.
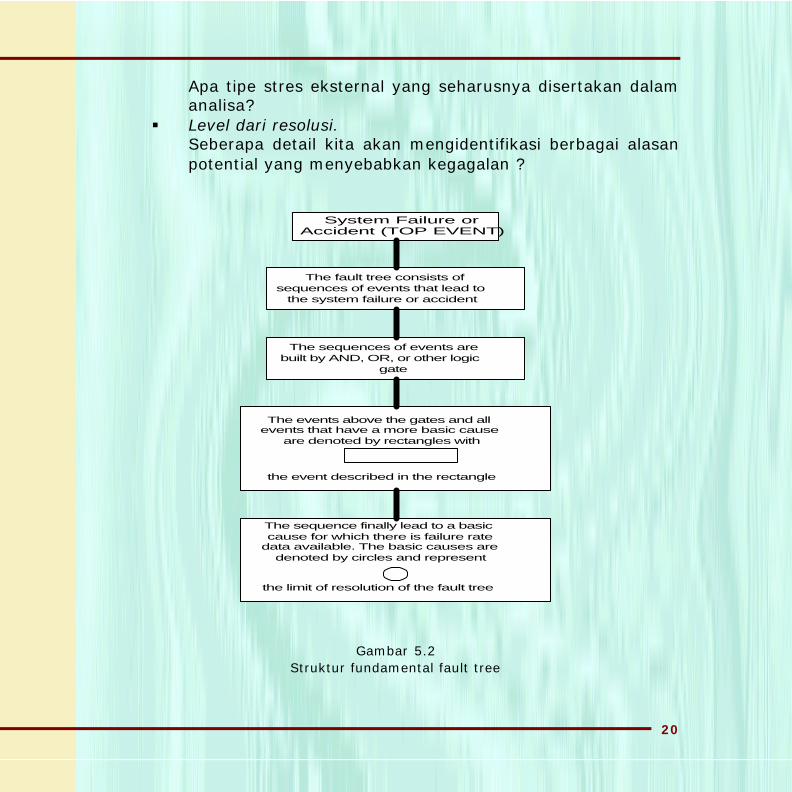
20
Apa tipe stres eksternal yang seharusnya disertakan dalamanalisa?
§ Level dari resolusi.Seberapa detail kita akan mengidentifikasi berbagai alasanpotential yang menyebabkan kegagalan ?
System Failure orAccident (TOP EVENT)
The fault tree consists ofsequences of events that lead to
the system failure or accident
The sequences of events arebuilt by AND, OR, or other logic
gate
The events above the gates and allevents that have a more basic cause
are denoted by rectangles with
the event described in the rectangle
The sequence finally lead to a basiccause for which there is failure rate
data available. The basic causes aredenoted by circles and represent
the limit of resolution of the fault tree
Gambar 5.2Struktur fundamental fault tree
21
5.3.2 Pengkonstruksian Fault Tree
Pengkonstruksian fault tree selalu bermula dari TOP event. Olehkarena itu, berbagai fault event yang secara langsung, penting, danberbagai penyebab terjadinya TOP event harus secara telitidiidentifikasi. Berbagai penyebab ini dikoneksikan ke TOP event olehsebuah gerbang logika. Penting kiranya bahwa penyebab levelpertama dibawah TOP event harus disusun secara terstruktur. Levelpertama ini sering disebut dengan TOP structure dari sebuah faulttree. TOP structure ini sering diambil dari kegagalan modul – modulutama sistem, atau fungsi utama dari sistem. Analisa dilanjutkanlevel demi level samapai semua fault event telah dikembangkansampai pada resolusi yang ditentukan. Analisa ini merupakan analisadeduktif dan dilakukan dengan mengulang pertanyaan “Apa alasanterjadinya event ini ?”. Gambar 5.2 menunjukkan strukturfundamental dari sebuah fault tree, sedangkan tabel 5.1menunjukkan berbagai simbol yang dipakai untuk mengkostruksisebuah fault tree.
Ada beberapa aturan yang harus dipenuhi dalammengkonstruksi sebuah fault tree. Berikut ini beberapa aturan yangdipakai untuk mengkonstruksi sebuah fault tree.
1. Diskripsikan fault event.Masing – masing basic event harus didefiniskan secara teliti (apa,dimana, kapan) dalam sebuah kotak.
2 Evaluasi fault event.Seperti yang telah diuraikan pada seksi 5.2, kegagalan komponendikelompokkan dalam tiga kelompok yaitu, primary failures,secondary failures, dan command faults.
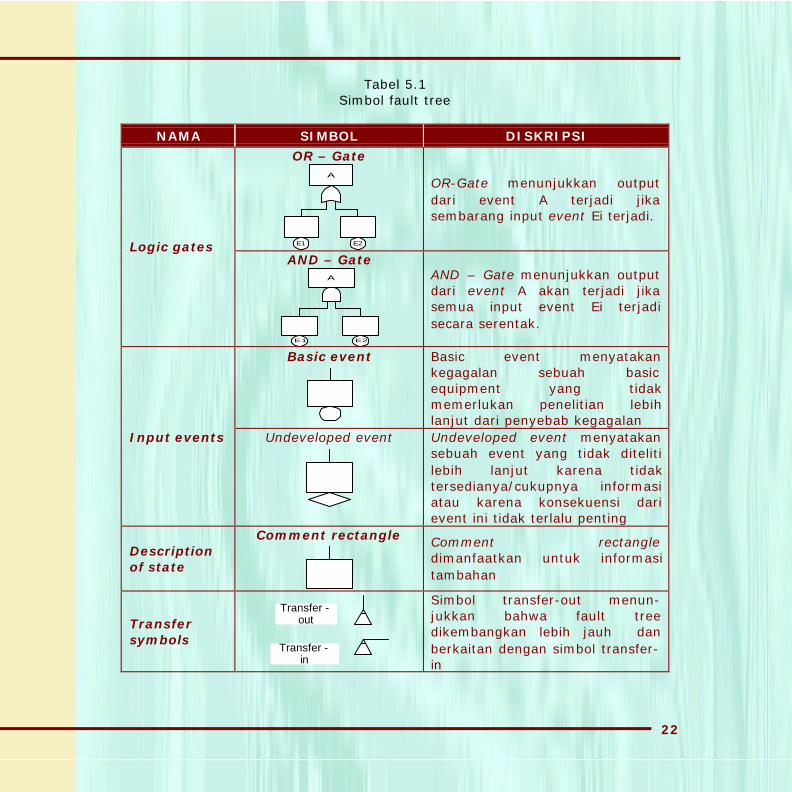
22
Tabel 5.1Simbol fault tree
NAMA SIMBOL DISKRIPSI
OR – GateA
E1 E2
OR-Gate menunjukkan outputdari event A terjadi jikasembarang input event Ei terjadi.
Logic gatesAND – Gate
A
E1 E2
AND – Gate menunjukkan outputdari event A akan terjadi jikasemua input event Ei terjadisecara serentak.
Basic event Basic event menyatakankegagalan sebuah basicequipment yang tidakmemerlukan penelitian lebihlanjut dari penyebab kegagalan
Input events Undeveloped event Undeveloped event menyatakansebuah event yang tidak ditelitilebih lanjut karena tidaktersedianya/cukupnya informasiatau karena konsekuensi darievent ini tidak terlalu penting
Descriptionof state
Comment rectangle Comment rectangledimanfaatkan untuk informasitambahan
Transfersymbols
Transfer -out
Transfer -in
Simbol transfer-out menun-jukkan bahwa fault treedikembangkan lebih jauh danberkaitan dengan simbol transfer-in
23
Sebuah normal basic event di dalam sebuah fault treemerupakan sebuah primary failures yang menunjukkan bahwakomponen merupakan penyebab dari dari kegagalan. Secondaryfailures dan command faults merupakan intermediate event yangmembutuhkan investigasi lebih mendalam untuk mengi-dentifikasialasan utama.
Pada saat mengevaluasi sebuah fault event, seorang analisakan bertanya, “Dapatkah fault ini dikategorikan dalam primaryfailure ?” Jika jawabannya adalah YA, maka analis tersebut dapatmengkalsifikasikan fault event sebagai normal basic event. Jikajawabannya adalah TIDAK, maka analis tersebut dapatmengkalsifikasikan fault event sebagai intermediate event , yangharus didevelop lebih jauh, atau sebagai secondary basic event .Secondary basic event sering disebut dengan undeveloped eventdan menunjukkan sebuah fault event yang tidak dikaji lebih jauhkarena informasinya tidak tersedia atau karena dampak yangditimbulkan tidak signifikan.
3. Lengkapi semua gerbang logika.Semua input ke gate tertentu harus didefiniskan dengan
lengkap dan didiskripsikan sebelum memproses gate lainnya. Faulttree harus diselesaikan pada masing – masing level sebelummemulai level berikutnya.
Contoh 5.1
Gambar 5.3 menunjukkan sebuah coolant supply system yang terdiridari sebuah constant speed pump, heat exchnager, control valve,resservoir, perpipaan. Fungsi utama dari sistem ini adalah untukmemberikan suplai pendingainan yang cukup terhadap peralatanutama. Konstruksi sebuah fault tree untuk sistem ini dengan TOPevent hilangnya aliran (coolant) minimum ke heat exchanger.
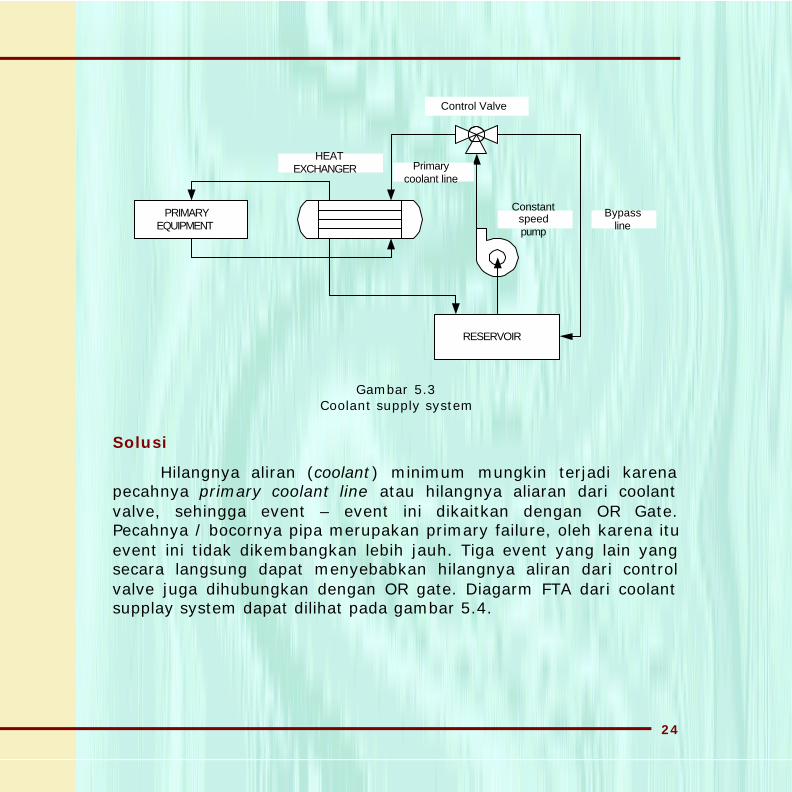
24
PRIMARYEQUIPMENT
RESERVOIR
HEATEXCHANGER Primary
coolant line
Control Valve
Constantspeedpump
Bypassline
Gambar 5.3Coolant supply system
Solusi
Hilangnya aliran (coolant) minimum mungkin terjadi karenapecahnya primary coolant line atau hilangnya aliaran dari coolantvalve, sehingga event – event ini dikaitkan dengan OR Gate.Pecahnya / bocornya pipa merupakan primary failure, oleh karena ituevent ini tidak dikembangkan lebih jauh. Tiga event yang lain yangsecara langsung dapat menyebabkan hilangnya aliran dari controlvalve juga dihubungkan dengan OR gate. Diagarm FTA dari coolantsupplay system dapat dilihat pada gambar 5.4.
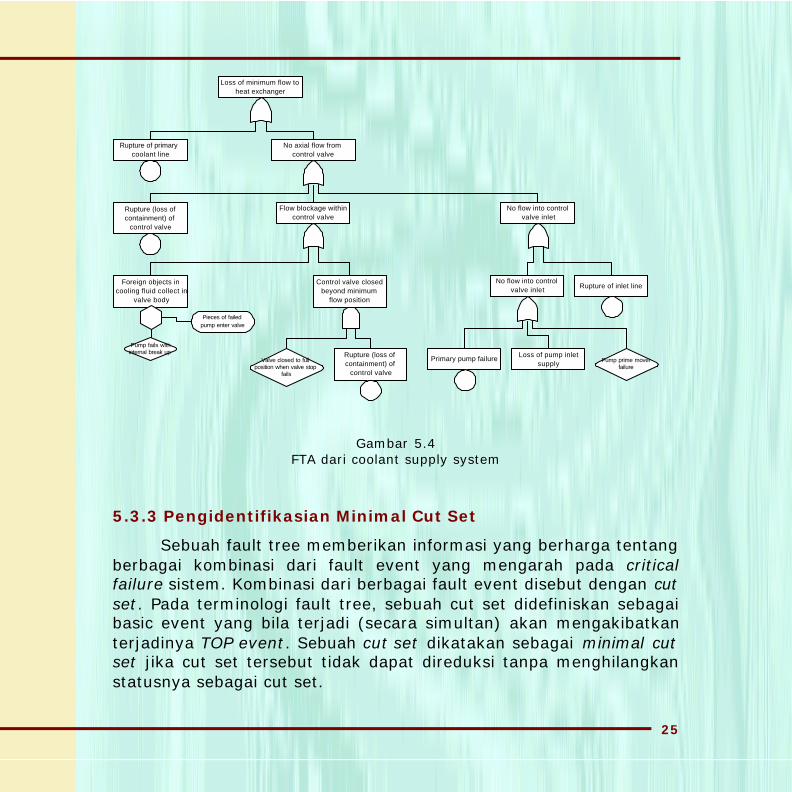
25
Loss of minimum flow toheat exchanger
Rupture of primarycoolant line
No axial flow fromcontrol valve
Rupture (loss ofcontainment) of
control valve
Flow blockage withincontrol valve
No flow into controlvalve inlet
Foreign objects incooling fluid collect in
valve body
Pieces of failedpump enter valve
Pump fails withinternal break up
Control valve closedbeyond minimum
flow position
Valve closed to fullposition when valve stop
fails
Rupture (loss ofcontainment) of
control valve
No flow into controlvalve inlet
Rupture of inlet line
Primary pump failureLoss of pump inlet
supplyPump prime mover
failure
Gambar 5.4FTA dari coolant supply system
5.3.3 Pengidentifikasian Minimal Cut Set
Sebuah fault tree memberikan informasi yang berharga tentangberbagai kombinasi dari fault event yang mengarah pada criticalfailure sistem. Kombinasi dari berbagai fault event disebut dengan cutset. Pada terminologi fault tree, sebuah cut set didefiniskan sebagaibasic event yang bila terjadi (secara simultan) akan mengakibatkanterjadinya TOP event. Sebuah cut set dikatakan sebagai minimal cutset jika cut set tersebut tidak dapat direduksi tanpa menghilangkanstatusnya sebagai cut set.
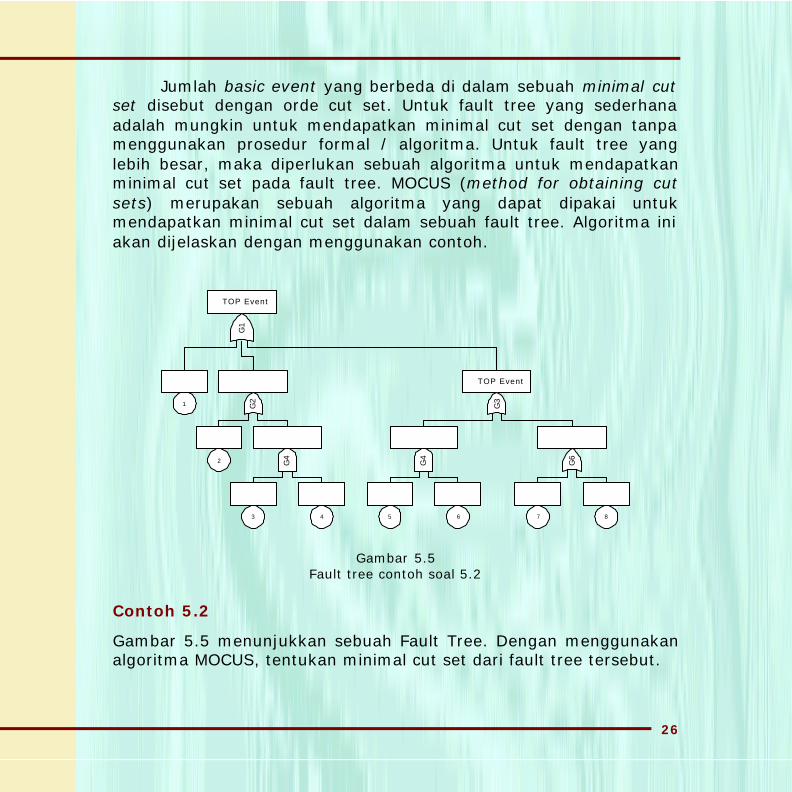
26
Jumlah basic event yang berbeda di dalam sebuah minimal cutset disebut dengan orde cut set. Untuk fault tree yang sederhanaadalah mungkin untuk mendapatkan minimal cut set dengan tanpamenggunakan prosedur formal / algoritma. Untuk fault tree yanglebih besar, maka diperlukan sebuah algoritma untuk mendapatkanminimal cut set pada fault tree. MOCUS (method for obtaining cutsets) merupakan sebuah algoritma yang dapat dipakai untukmendapatkan minimal cut set dalam sebuah fault tree. Algoritma iniakan dijelaskan dengan menggunakan contoh.
TOP Event
G1
1 G2
TOP Event
G3
2
3 4 5 6
G6
7 8
G4
G4
Gambar 5.5Fault tree contoh soal 5.2
Contoh 5.2
Gambar 5.5 menunjukkan sebuah Fault Tree. Dengan menggunakanalgoritma MOCUS, tentukan minimal cut set dari fault tree tersebut.
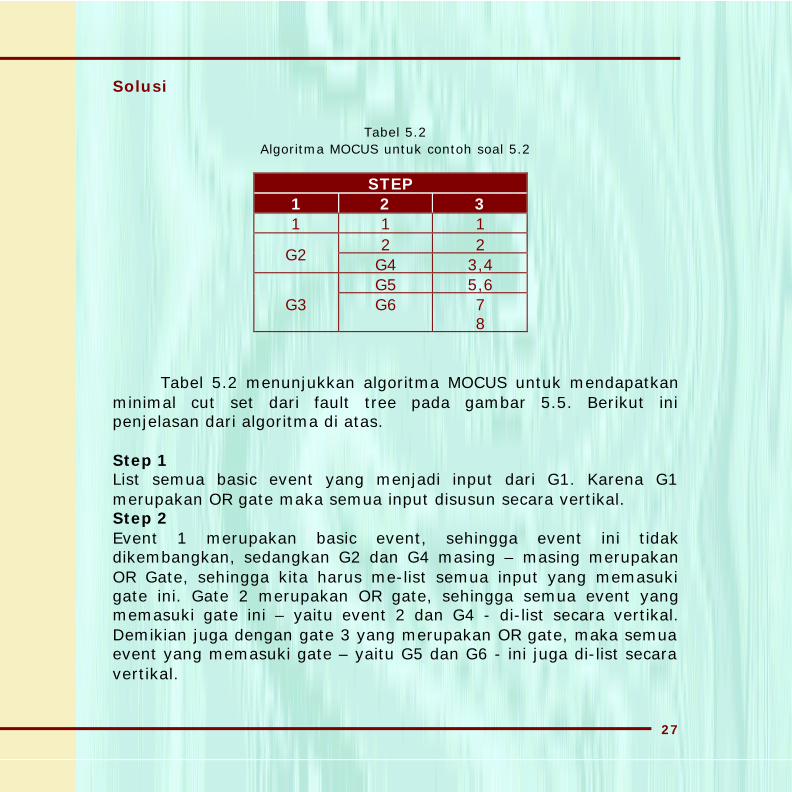
27
Solusi
Tabel 5.2Algoritma MOCUS untuk contoh soal 5.2
STEP1 2 31 1 1
2 2G2
G4 3,4G5 5,6
G3 G6 78
Tabel 5.2 menunjukkan algoritma MOCUS untuk mendapatkanminimal cut set dari fault tree pada gambar 5.5. Berikut inipenjelasan dari algoritma di atas.
Step 1List semua basic event yang menjadi input dari G1. Karena G1merupakan OR gate maka semua input disusun secara vertikal.Step 2Event 1 merupakan basic event, sehingga event ini tidakdikembangkan, sedangkan G2 dan G4 masing – masing merupakanOR Gate, sehingga kita harus me-list semua input yang memasukigate ini. Gate 2 merupakan OR gate, sehingga semua event yangmemasuki gate ini – yaitu event 2 dan G4 - di-list secara vertikal.Demikian juga dengan gate 3 yang merupakan OR gate, maka semuaevent yang memasuki gate – yaitu G5 dan G6 - ini juga di-list secaravertikal.
28
Step 3Gate 4 merupakan AND gate, sehingga semua event yang memasukigate ini – basic event 3 dan basic event 4 - harus ditulis secarahorisontal. Gate 5 juga merupakan AND gate, sehingga merupakanAND gate, sehingga semua event yang memasuki gate ini harusditulis secara horisontal. horisontal. Gate 6 merupakan OR gate,sehingga semua event yang memasuki gate ini – basic event 7 danbasic event 8 - harus ditulis secara vertikal.
Semua event yang diperoleh dengan algoritma MOCUS padastep 3 semuanya merupakan basic event, sehingga kita mendapatkancut set dari fault tree ini adalah {1}, {2}, {3,4},{5,6}, {7}, dan {8}yang semuanya merupakan minimal cut set.
5.3.4 Evaluasi Kualitatif Fault Tree
Evaluasi kualitatif dari sebuah fault tree dapat dilakukanberdasarkan minimal cut set. Kekritisan dari sebuah cut set jelastergantung pad jumlah basic event di dalam cut set (orde daricutset). Sebuah cut set dengan orde satu umumnya lebih kritisdaripada sebuah cut set dengan orde dua atau lebih. Jika sebuahfault tree memiliki cut set dengan orde satu, maka TOP event akanterjadi sesaat setelah basic event yang bersangkutan terjadi. Jikasebuah cut set memiliki dua basic event, kedua event ini harusterjadi secara serentak agar TOP event dapat terjadi.
Faktor lain yang penting adalah jenis basic event dari sebuahminimal cut set. Kekritisan dari berbagai cut set dapat dirangkingberdasarkan dari basic event berikut ini :
§ Human error§ Kegagalan komponen / peralatan yang aktif (active
equipment failure)
29
§ Kegagalan komponen / peralatan yang pasif (passiveequipment failure)
Peringkat ini disusun berdasarkan asumsi bahwa human error lebihsering terjadi dari pada komponen / peralatan yang aktif dankomponen / peralatan yang aktif lebih rentan terhadapa kegagalanbila dibandingkan komponen / peralatan yang pasif.
5.3.5 Evaluasi Kuantitaif Fault Tree
Secara umum ada dua buah metode untuk mengevaluasisebuah fault tree secara kuantitatif. Kedua metode ini adalah metodedengan menggunakan pendekatan aljabar boolean (boolean algebraapproach) serta metode perhitung langsung (direct numericalapproach).
Boolean algebra approach
Tabel 5.3 menunjukkan hukum – hukum aljabar boolean yangdipakai untuk melakukan evaluasi fault tree secara kuantitatif.Pendekatan aljabar boolean berawal dari TOP event danmendiskripsikannya secara logis dalam basic event, incomplete eventdan intermediate event . Semua intermediate event akan digantikanoleh event – event pada hirarki yang lebih rendah. Hal ini terusdilakukan sampai pernyataan logika yang menyatakan TOP eventsemuanya dalam bentuk basic event dan incomplete event. Contoh5.3 akan mengilustrasikan pemakain metode ini dalam mengevaluasisebuah fault tree.
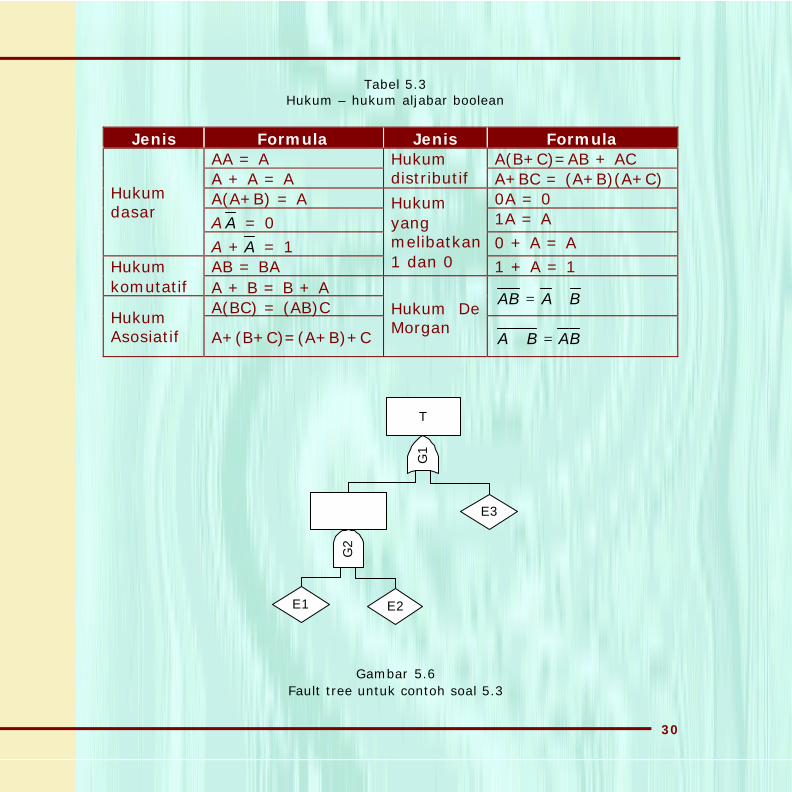
30
Tabel 5.3Hukum – hukum aljabar boolean
Jenis Formula Jenis FormulaAA = A A(B+C)=AB + ACA + A = A
Hukumdistributif A+BC = (A+B)(A+C)
A(A+B) = A 0A = 0A A = 0 1A = A
Hukumdasar
A + A = 1 0 + A = AAB = BA
Hukumyangmelibatkan1 dan 0 1 + A = 1Hukum
komutatif A + B = B + AA(BC) = (AB)C BAAB +=
HukumAsosiatif A+(B+C)=(A+B)+C
Hukum DeMorgan
BABA =+
TG
1
G2
E1
E3
E2
Gambar 5.6Fault tree untuk contoh soal 5.3
31
Contoh 5.3
Gambar 5.6 menunjukkan sebuah fault tree. TOP event dari fault treeini menyatakan hilangya suplai daya listrik. TOP event ini memilikidua input event yaitu Intermediate event (I) dan incomplete eventyang mewakili hilangnya power dc (E3). Intermediate event (I)memiliki dua incomplete evemt E1 dan E2 yang masing – masingmewakili hilangnya offsite power dan hilangnya onsite power. Datakeandalan yang tersedia untuk E1, E2, dan E3 masing – masingadalah 0,933 ; 0,925 ; dan 0,995. Dengan menggunakan pendekatanalajabar boolean dapatkan probabilitas terjadinya kegagalan TOPevent.
Solusi
Ekspresi alajabar boolean untuk level pertama adalah
T = I + E3
Intermediate evant dapat diganti dengan
I = E1.E2
Oleh karena itu
T = E1.E2
Persamaan di atas merupakan ekspresi akhir aljabar boolean darifault tree yang sedang dianalisa. Probabilitas terjadinya TOP event Tdapat dievaluasi dengan menggunakan aljabar boolean.
P(T) = P(E1.E2 + E3)
32
= [P(E1)P(E2)] + P(E3) –[ P(E1)P(E2)P(E3) ]
dimanaP(E1) = 1 – 0,933 = 0,067P(E2) = 1 – 0,925 = 0,075P(E3) = 1 – 0,995 = 0,005
SehinggaP(T) = 0,01 q
Direct numerical approach
Kerugian dari boolean algebra approach adalah ekspresi yangkompleks jika sistem yang besar dan fault tree yang berhubungandengan sistem tersebut akan dikaji. Pendekatan alternatif untukmenghitung nilai numerik probabilitas dapat dilakukan denganmenggunakan direct numerical approach. Berbeda dengan booleanalgebra approach yang memiliki sifat top-down approach makapendekatan numerik ini bersifat bottom-up approach. Pendekatannumerik ini berawal dari level hirarki yang paling rendah danmengkombinasikan semua probabilitas dari event yang ada padalevel ini dengnan menggunakan logic gate yang tepat dimana event –event ini dikaitkan. Kombinasi probabilitas ini akan memberikan nilaiprobabilitas dari intermediate event pada level hirarki diatasnya.Proses ini berlangsung terus ke atas sampai TOP event dicapai.
Contoh 5.4
Tinjau kembali contoh soal 5.3. dengan menggunakan pendekatannumerik hitung probabilitas terjadinya TOP event.
33
Solusi
P(I) = P(E1)P(E2)= (1-0,933)(1-0,925) = 0,005025
P(T) = P(I U E3) = P(I) + P(E3) - P(I)P(E3)=o,005025 + (1 – 0,995) – 0,005025 (1 – 0,995)= 0,01 q
Untuk fault tree yang cukup kompleks, selain menggunakandua metode evaluasi yang sudah didiskusikan di atas, evaluasikuantitatif dari dapat juga dievaluasi dengan menggunakan formulapendekatan seperti yang sudah didiskusikan pada seksi 3.10. datayang diperlukan adalah minimal cut set dari fault tree.
Jika Ci menyatakan minimal cut set ke-i dari suatu fult tree, danjika P(Ci) mewakili probabilitas untuk event Ci maka denganmenggunakan aljabar boolean unreliability dari sistem secara umumdapat diekspresikan sebagai
( )
∑∑∑
∑ ∑∑
=
−
=
−
=
−
= =
−
=
∩∩∩−++∩∩+
∩−=∪∪∪=
n
i
i
j
j
kn
nkji
n
i
n
i
i
jjiiniS
CCCPCCCP
CCPCPCCCCPQ
3
1
2
1
121
1
1 2
1
121
) ... ()1( ... )(
)()(......
(5.1)
Henley dan Kumamoto [1992] memberikan suatu metodeevaluasi secara aproksimasi untuk sistem yang memiliki konstruksifault tree yang sangat kompleks dengan menyederhanaan persamaan(5.1). Aproksimasi ketakandalan dari sistem dapat diperoleh denganmenghitung upperbound dan lowerbound dari unreliability sistemdengan formula sebagai berikut.
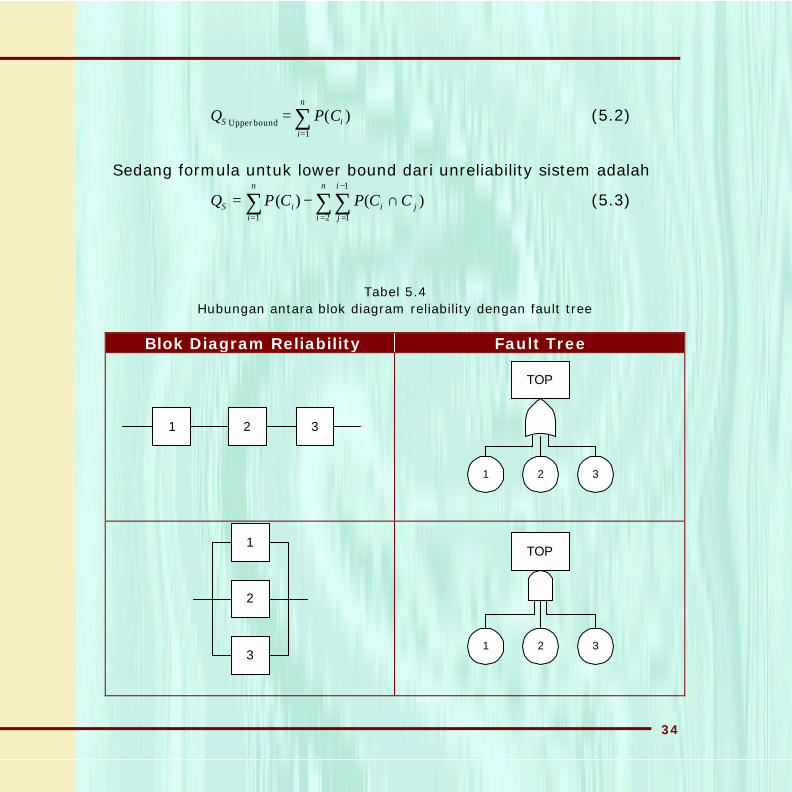
34
∑=
=n
iiS CPQ
1boundUpper )( (5.2)
Sedang formula untuk lower bound dari unreliability sistem adalah
∑ ∑∑= =
−
=
∩−=n
i
n
i
i
jjiiS CCPCPQ
1 2
1
1
)()( (5.3)
Tabel 5.4Hubungan antara blok diagram reliability dengan fault tree
Blok Diagram Reliability Fault Tree
1 32
TOP
1 32
1
3
2
TOP
1 32
35
Sebuah fault tree dapat diterjemahkan ke dalam blok diagramkeandalan dengan menerjemahkan basic event ke dalam sebuah blokdan menerjemahkan gerbang logika ke dalam susunan tertentu -seri, paralel atau susunan lainnya - yang menghubungkan berbagaiblok. Hubungan antara fault tree dan blok diagram reliability untukkonfigurasi yang sederhana diperlihatkan pada tabel 5.4.
5.4 Failure Modes and Effects Analysis (FMEA)
Failure modes and effects analysis (FMEA) merupakan salahsatu teknik yang sistematis untuk menganalisa kegagalan. Teknik inidikembangkan pertama kali sekitar tahun 1950-an oleh parareliability engineers yang sedang mempelajari masalah yangditimbulkan oleh peralatan militer yang mengalami malfungsi.
Teknik analisa ini lebih menekankan pada hardware-orientedapproach atau bottom-up approach. Dikatakan demikian karenaanalisa yang dilakukan dimulai dari peralatan dan meneruskannya kesistem yang merupakan tingkat yang lebih tinggi. Proses ini mencobamenjawab pertanyaan “Apa dampak yang akan terjadi jika terjadikegagalan pada ……….?”.
FMEA sering menjadi langkah awal dalam mempelajarikeandalan sistem. Kegiatan FMEA melibatkan banyak hal - sepertime-review berbagai komponen, rakitan, dan subsistem - untukmengidentifikasi mode – mode kegagalannya, penyebabkegagalannya, serta dampak kegagalan yang ditimbulkan. Untukmasing – masing komponen, berbagai mode kegagalan berikutdampaknya pada sistem ditulis pada sebuah FMEA worksheet. Adaberbagai bentuk dari worksheet untuk FMEA, salah satu diantanyaseperti yang ditunjukkan pada gambar 5.7.
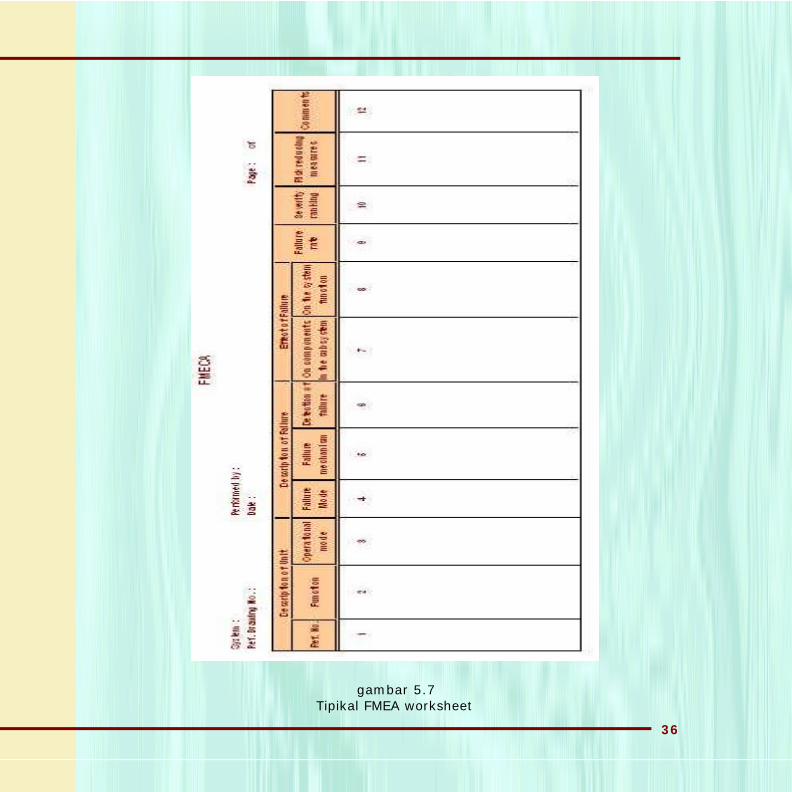
36
gambar 5.7Tipikal FMEA worksheet
37
Sebuah FMEA akan berubah menjadi FMECA (failure mode,effects, and criticallity analysis) jika kekritisan atau prioritas akandikaitan dengan dampak dari mode kegagalan yang ditimbulkan olehsebuah komponen.
Secara umum tujuan dari penyusunan FMEA (IEEE Std. 352)adalah sebagai berikut.
1. Membatu dalam pemilihan desain alternatif yang memilikikeandalan dan keselamatan potensial yang tinggi selama fasedesain.
2. Untuk menjamin bahwa semua bentuk mode kegagalan yangdapat diperkirakan berikut dampak yang ditimbulkannyaterhadap kesuksesan operasional sistem telahdipertimbangkan.
3. Membuat list kegagalan potensial , serta mengidentifikasiseberapa besar dampak yang ditimbulkannya.
4. Men-develop kriteria awal untuk rencana dan desain pengujianserta untuk membuat daftar pemeriksaaan sistem.
5. Sebagai basis analisa kualitatif keandalan dan ketersediaan.6. Sebagai dokumentasi untuk referensi pada masa yang akan
datang untuk membantu menganalisa kegagalan yang terjadidi lapangan serta membantu bila sewaktu – waktu terjadiperubahan desain.
7. Sebagai data input untuk studi banding.8. Sebagai basis untuk menentukan prioritas perawatan korektif.
FMEA merupakan salah satu bentuk analisa kualitatif, dan FMEAharus dilakukan oleh seorang desainer pada tahap desain sistem.Tujuannya adalah untuk mengidentifikasi desain di area mana yangmasih memerlukan perbaikan agar persyaratan keandalan dapatdipenuhi.
38
5.4.1 Prosedur Penyusunan FMEA
FMEA sangat sederhana untuk dilakukan. FMEA tidakmembutuhkan ketrampilan yang canggih bagi seorang personel untukmelakukan analisa. Hal yang diperlukan dalam menganalisa adalahuntuk mengetahui dan memahami fungsi dari sistem dan beberapaconstrain dimana sistem itu harus dapat beroperasi. Berikut inibeberapa pertanyaan dasar yang yang harus dijawab oleh seoranganalis dalam melakukan analisa FMEA (IEEE Std. No. 352).
1. Bagaimana masing – masing komponen mengalamikegagalan ?
2. Mekanisme apa yang mungkin menghasilkan suatu modekegagalan tertentu ?
3. Apa dampak dari kegagalan yang terjadi ?4. Apakah kegagalan yang terjadi ada kaitannya dengan
keselamatan atau tidak ?5. Bagaiman kegagalan itu dapat dideteksi ?6. Apa yang harus disediakan desain untuk mengkompensasi
kegagalan ?
Pertanyaan – pertanyaan tersebut di atas akan ditabelkan dalmsebuah spread sheet. Gambar 5.7 menunjukkan contoh tipikal darisebuah FMEA. Berikut ini penjelasan dari masing – masing kolomyang ada di FMEA worksheet.
Reference (kolom 1)Menunjukkan nam unit atau gambar.
Function (kolom 2)Mendiskripsikan fungsi dari komponen yang sedang di analisa.
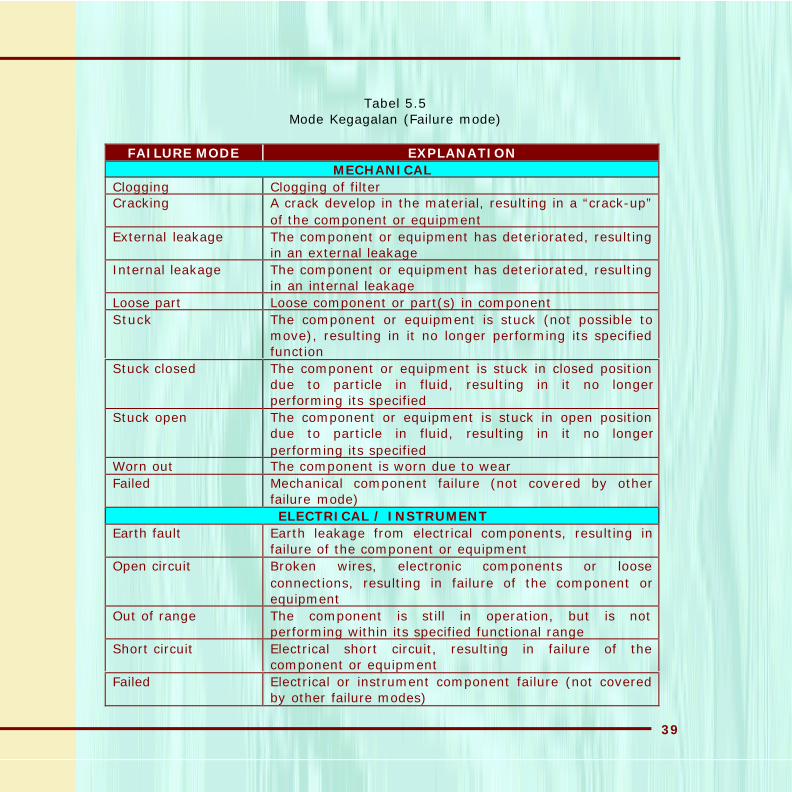
39
Tabel 5.5Mode Kegagalan (Failure mode)
FAILURE MODE EXPLANATIONMECHANICAL
Clogging Clogging of filterCracking A crack develop in the material, resulting in a “crack-up”
of the component or equipmentExternal leakage The component or equipment has deteriorated, resulting
in an external leakageInternal leakage The component or equipment has deteriorated, resulting
in an internal leakageLoose part Loose component or part(s) in componentStuck The component or equipment is stuck (not possible to
move), resulting in it no longer performing its specifiedfunction
Stuck closed The component or equipment is stuck in closed positiondue to particle in fluid, resulting in it no longerperforming its specified
Stuck open The component or equipment is stuck in open positiondue to particle in fluid, resulting in it no longerperforming its specified
Worn out The component is worn due to wearFailed Mechanical component failure (not covered by other
failure mode)ELECTRICAL / INSTRUMENT
Earth fault Earth leakage from electrical components, resulting infailure of the component or equipment
Open circuit Broken wires, electronic components or looseconnections, resulting in failure of the component orequipment
Out of range The component is still in operation, but is notperforming within its specified functional range
Short circuit Electrical short circuit, resulting in failure of thecomponent or equipment
Failed Electrical or instrument component failure (not coveredby other failure modes)
40
Operational mode (kolom 3)Menunjukkan mode pengoperasian dari komponen. Sebagai contoh,sebuah komponen mungkin memiliki lebih dari satu modepengoperasian seperti pengoperasian normal atau standby.
Failure mode (kolom 4)Untuk masing – masing fungsi komponen dan modepengoperasiannya, semua mode kegagalan diidentifikasi dan direcordpada kolom ini. Sebuah mode kegagalan dapat didefinisikan sebagaikegagalan komponen untuk memenuhi salah satu fungsi darikomponen tersebut.
Cara praktis untuk mendapatkan mode kegagalan yangsignifikan adalah dari pengalaman pengoperasian komponen danmenanyakan kepada personel yang menangani perawatan komponen.Tabel 5.5 menunjukkan beberpa tipikal mode kegagalan yang dialamioleh peralatan mekanik dan elektrik.
Failure mechanism (kolom 5)Semua mekanisme kegagalan yang mungkin yang dihasilkan olehmode kegagalan yang sudah diidentifkasi direcord dalam kolom ini.Tabel 5.6 menunjukkan beberpa tipikal mode kegagalan yang dialamioleh peralatan.
Detection of failure (kolom 6)Berbagai kemungkinan pendeteksian dari berbagai mode kegagalandirecord pada kolom ini. Tabel 5.7 menunjukkan beberpa tipikalmetode pendeteksian mode kegagalan yang mungkin dialami olehperalatan.
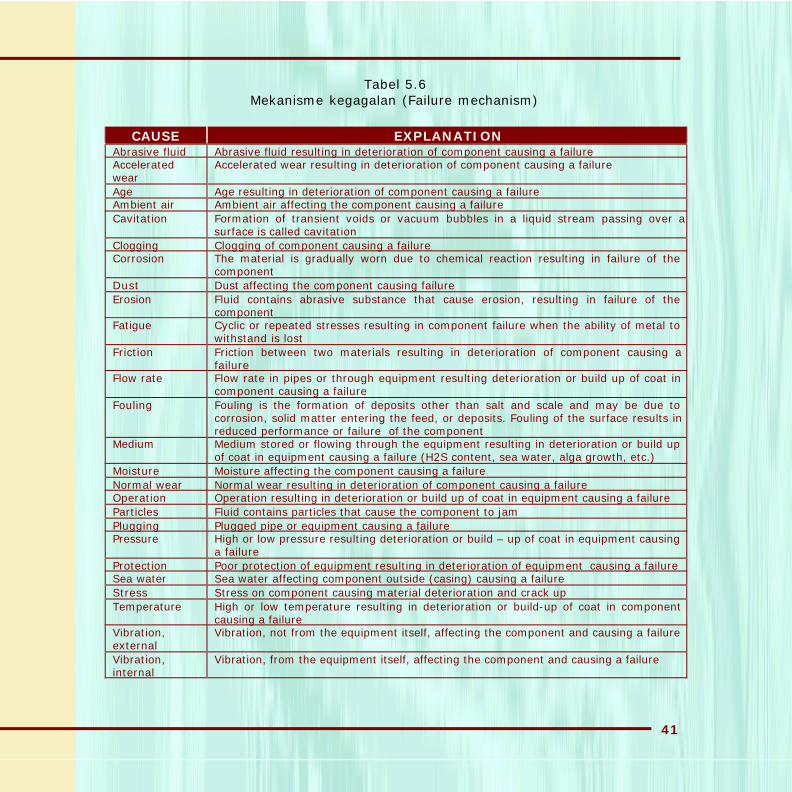
41
Tabel 5.6Mekanisme kegagalan (Failure mechanism)
CAUSE EXPLANATIONAbrasive fluid Abrasive fluid resulting in deterioration of component causing a failureAcceleratedwear
Accelerated wear resulting in deterioration of component causing a failure
Age Age resulting in deterioration of component causing a failureAmbient air Ambient air affecting the component causing a failureCavitation Formation of transient voids or vacuum bubbles in a liquid stream passing over a
surface is called cavitationClogging Clogging of component causing a failureCorrosion The material is gradually worn due to chemical reaction resulting in failure of the
componentDust Dust affecting the component causing failureErosion Fluid contains abrasive substance that cause erosion, resulting in failure of the
componentFatigue Cyclic or repeated stresses resulting in component failure when the ability of metal to
withstand is lostFriction Friction between two materials resulting in deterioration of component causing a
failureFlow rate Flow rate in pipes or through equipment resulting deterioration or build up of coat in
component causing a failureFouling Fouling is the formation of deposits other than salt and scale and may be due to
corrosion, solid matter entering the feed, or deposits. Fouling of the surface results inreduced performance or failure of the component
Medium Medium stored or flowing through the equipment resulting in deterioration or build upof coat in equipment causing a failure (H2S content, sea water, alga growth, etc.)
Moisture Moisture affecting the component causing a failureNormal wear Normal wear resulting in deterioration of component causing a failureOperation Operation resulting in deterioration or build up of coat in equipment causing a failureParticles Fluid contains particles that cause the component to jamPlugging Plugged pipe or equipment causing a failurePressure High or low pressure resulting deterioration or build – up of coat in equipment causing
a failureProtection Poor protection of equipment resulting in deterioration of equipment causing a failureSea water Sea water affecting component outside (casing) causing a failureStress Stress on component causing material deterioration and crack upTemperature High or low temperature resulting in deterioration or build-up of coat in component
causing a failureVibration,external
Vibration, not from the equipment itself, affecting the component and causing a failure
Vibration,internal
Vibration, from the equipment itself, affecting the component and causing a failure
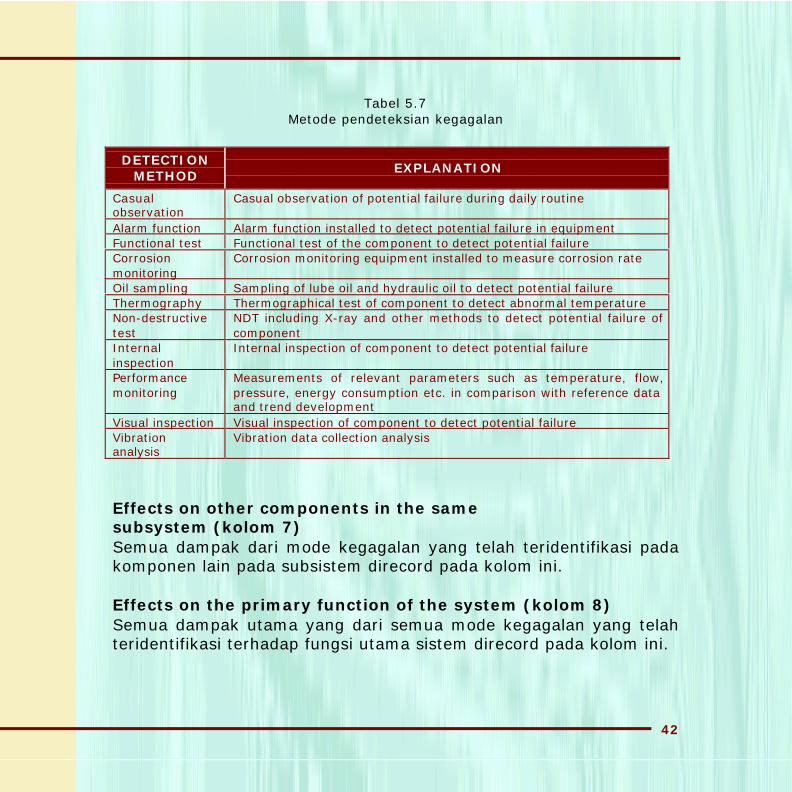
42
Tabel 5.7Metode pendeteksian kegagalan
DETECTIONMETHOD
EXPLANATION
Casualobservation
Casual observation of potential failure during daily routine
Alarm function Alarm function installed to detect potential failure in equipmentFunctional test Functional test of the component to detect potential failureCorrosionmonitoring
Corrosion monitoring equipment installed to measure corrosion rate
Oil sampling Sampling of lube oil and hydraulic oil to detect potential failureThermography Thermographical test of component to detect abnormal temperatureNon-destructivetest
NDT including X-ray and other methods to detect potential failure ofcomponent
Internalinspection
Internal inspection of component to detect potential failure
Performancemonitoring
Measurements of relevant parameters such as temperature, flow,pressure, energy consumption etc. in comparison with reference dataand trend development
Visual inspection Visual inspection of component to detect potential failureVibrationanalysis
Vibration data collection analysis
Effects on other components in the samesubsystem (kolom 7)Semua dampak dari mode kegagalan yang telah teridentifikasi padakomponen lain pada subsistem direcord pada kolom ini.
Effects on the primary function of the system (kolom 8)Semua dampak utama yang dari semua mode kegagalan yang telahteridentifikasi terhadap fungsi utama sistem direcord pada kolom ini.
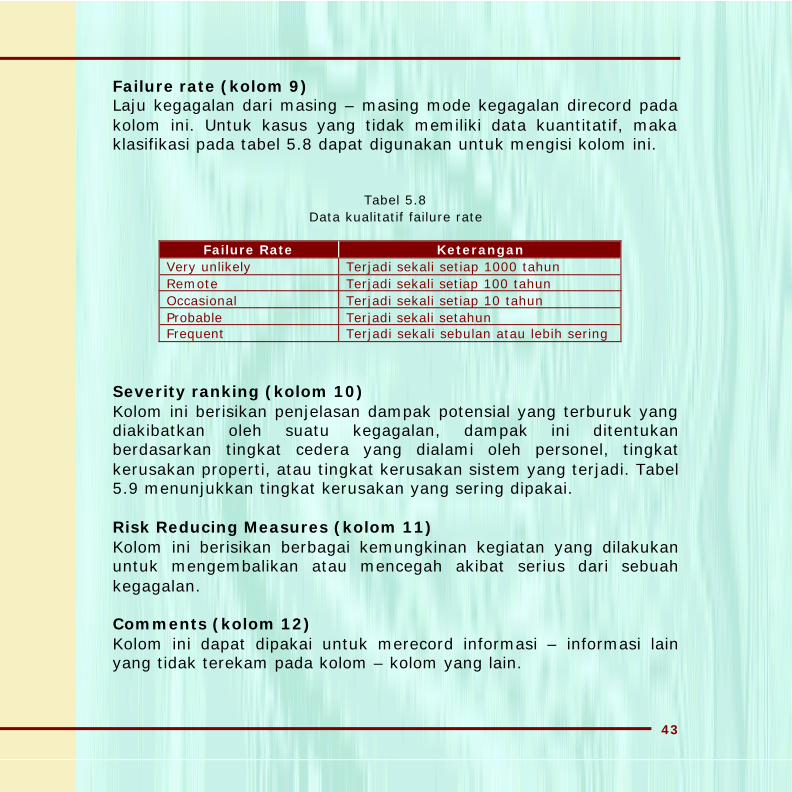
43
Failure rate (kolom 9)Laju kegagalan dari masing – masing mode kegagalan direcord padakolom ini. Untuk kasus yang tidak memiliki data kuantitatif, makaklasifikasi pada tabel 5.8 dapat digunakan untuk mengisi kolom ini.
Tabel 5.8Data kualitatif failure rate
Failure Rate KeteranganVery unlikely Terjadi sekali setiap 1000 tahunRemote Terjadi sekali setiap 100 tahunOccasional Terjadi sekali setiap 10 tahunProbable Terjadi sekali setahunFrequent Terjadi sekali sebulan atau lebih sering
Severity ranking (kolom 10)Kolom ini berisikan penjelasan dampak potensial yang terburuk yangdiakibatkan oleh suatu kegagalan, dampak ini ditentukanberdasarkan tingkat cedera yang dialami oleh personel, tingkatkerusakan properti, atau tingkat kerusakan sistem yang terjadi. Tabel5.9 menunjukkan tingkat kerusakan yang sering dipakai.
Risk Reducing Measures (kolom 11)Kolom ini berisikan berbagai kemungkinan kegiatan yang dilakukanuntuk mengembalikan atau mencegah akibat serius dari sebuahkegagalan.
Comments (kolom 12)Kolom ini dapat dipakai untuk merecord informasi – informasi lainyang tidak terekam pada kolom – kolom yang lain.
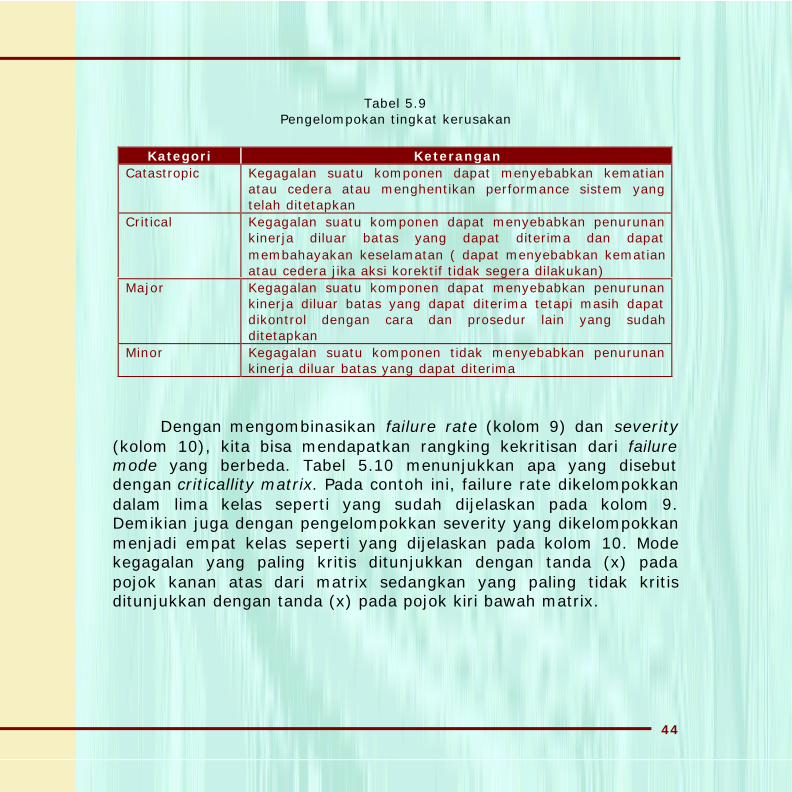
44
Tabel 5.9Pengelompokan tingkat kerusakan
Kategori KeteranganCatastropic Kegagalan suatu komponen dapat menyebabkan kematian
atau cedera atau menghentikan performance sistem yangtelah ditetapkan
Critical Kegagalan suatu komponen dapat menyebabkan penurunankinerja diluar batas yang dapat diterima dan dapatmembahayakan keselamatan ( dapat menyebabkan kematianatau cedera jika aksi korektif tidak segera dilakukan)
Major Kegagalan suatu komponen dapat menyebabkan penurunankinerja diluar batas yang dapat diterima tetapi masih dapatdikontrol dengan cara dan prosedur lain yang sudahditetapkan
Minor Kegagalan suatu komponen tidak menyebabkan penurunankinerja diluar batas yang dapat diterima
Dengan mengombinasikan failure rate (kolom 9) dan severity(kolom 10), kita bisa mendapatkan rangking kekritisan dari failuremode yang berbeda. Tabel 5.10 menunjukkan apa yang disebutdengan criticallity matrix. Pada contoh ini, failure rate dikelompokkandalam lima kelas seperti yang sudah dijelaskan pada kolom 9.Demikian juga dengan pengelompokkan severity yang dikelompokkanmenjadi empat kelas seperti yang dijelaskan pada kolom 10. Modekegagalan yang paling kritis ditunjukkan dengan tanda (x) padapojok kanan atas dari matrix sedangkan yang paling tidak kritisditunjukkan dengan tanda (x) pada pojok kiri bawah matrix.
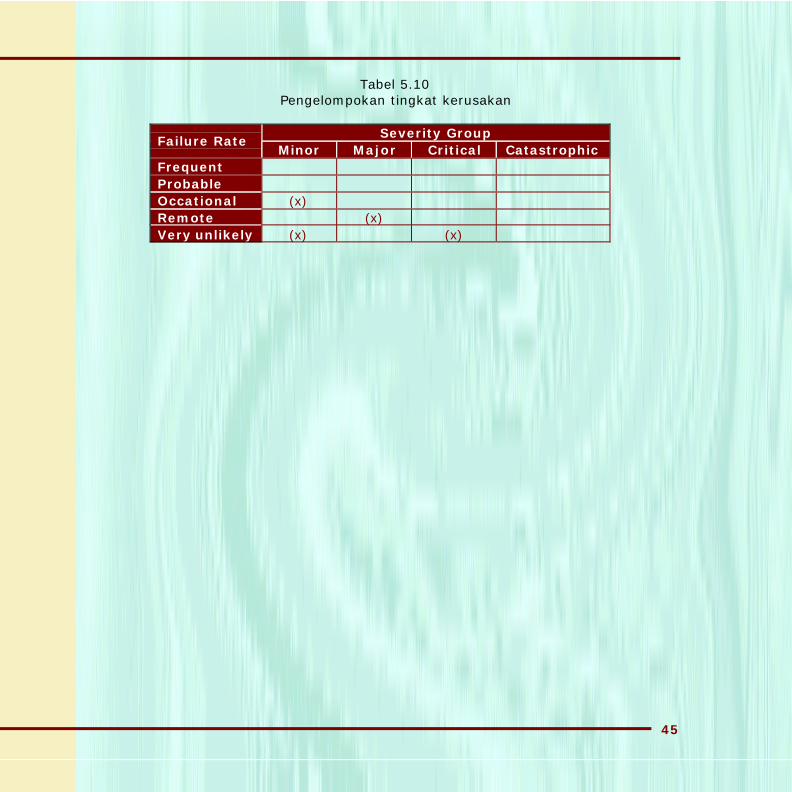
45
Tabel 5.10Pengelompokan tingkat kerusakan
Severity GroupFailure Rate
Minor Major Critical CatastrophicFrequentProbableOccational (x)Remote (x)Very unlikely (x) (x)
46
5.5 Referensi dan Bibliografi
1. Frankel, Ernst G., [1988], Systems Reliability and Risk Analysis,2nd edition, Kluwer Academic Publishers, PO BOX 17, 3300 AADordrecht, The Netherlands.
2. Henley, E.J. and Hiromitsu Kumamoto [1992], Probabilistic RiskAssessment : reliability Engineering, Design, and Analysis, IEEEPress, New York.
3. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
4. McCormick, N.J.[1981], Reliability and Risk Analysis : Methods andNuclear Power Applications, Academic Press, Inc.
5. Ruxton, T. [1997], “Formal Safety Assessment”, TransactionIMarE, Part 4.
6. Sandtorv, H., J. Eldby, M. Rasmussen [1990], Reliability-CenteredMaintenance – Hanbook for Offshore Application, Sintef Report.
7. ……….[1994], Training Course in Reliability-Centered Maintenance(RCM), MARINTEK Sintef Group.
8. 9. Kececioglu, D. [1991], Reliability Engineering Handbooks Volume
2, Prentice Hall, Englewood Cliffs, New Jersey.10. Ramakumar, R [1993]., Engineering Reliability : Fundamentals
and Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 2
KEANDALAN DAN PERAWATAN
Metode PengkajianKeandalanBagian 2
OlehIr. Dwi Priyanta, MSE
JURUSAN TEKNIK SISTEM PERKAPALANFAKULTAS TEKNOLOGI KELAUTANINSTITUT TEKNOLOGI SEPULUH NOPEMEBERSURABAYA
© Copyright ada pada penulis
MODUL3
FOR INTERNAL USE ONLY
DAFTAR ISI MODUL 3
BAB 6 Distribusi Probabilitas dan Terminologi Keandalan6.1 Pendahuluan6.2 Variabel Random6.3 Variabel Random Kontinyu6.4 Variabel random Diskrit6.5 Fungsi Distribusi Kumulatif6.6 Terminologi Keandalan6.7 Kurva Laju Kegagalan6.8 Distribusi Binomial6.9 Distribusi Poisson6.10 Distribusi Normal6.11 Distribusi Lognormal6.12 Distribusi Eksponensial6.13 Distribusi Weibull6.14 Goodnes-of-fit Tests6.15 Referensi dan Bibliografi
BAB 7 Model Keandalan Dinamis7.1 Pendahuluan7.2 Sistem Dengan Susunan Seri7.3 Sistem Dengan Susunan Paralel7.4 Sistem Dengan Susunan Gabungan Seri – Paralel7.5 Sistem Dengan Susunan Berlebihan Secara Parsial (Partially
Redundant System)7.6 Sistem Standby (Standby System)7.6.1 Perfect Switching7.6.2 Imperfect Switching7.7 Referensi dan Bibliografi
FOR INTERNAL USE ONLY
BAB 8 Component Importance8.1 Pendahuluan8.2 Birnbaum’s Measure8.3 Criticallity Importance8.4 Vesely – Fussell’s Measure8.5 Improvement Potential8.6 Referensi dan Bibliografi
KEMBALI KE MENU UTAMA
1
Distribusi Probabilitasdan Terminologi Keandalan
6.1 Pendahuluan
Bab yang terdahulu hanya mengevaluasi keandalan suatusistem rekayasa (engineering) denngan tidak menggunakan distribusiprobabilitas dari masing-masing komponen yang ada di dalam sistemtersebut. Dalam hal ini nilai keandalan dari masing-masing komponenyang ada di dalam sistem berupa angka yang tetap, artinya tidakbergantung pada waktu. Untuk tahap awal dalam mempelajari teorikeandalan sistem hal ini akan sangat membantu untuk memahamidasar-dasar perhitungan keandalan dari suatu sistem.
Nilai keandalan suatu komponen atau sistem merupakan nilaikemungkinan/probabilitas dari suatu komponen atau sistem untukdapat memenuhi fungsinya dalam kurun waktu dan kondisi tertentuyang sudah ditetapkan. Dan kenyataannya, untuk mengevaluasikeandalan suatu sistem rekayasa yang sebenarnya, nilai keandalandari suatu komponen tidak lagi merupakan harga yang tetapmelainkan akan bergantung terhadap waktu. Untuk itu
2
pengevaluasian keandalan akan banyak berhubungan distribusiprobabilitas dengan waktu sebagai variabel random.
Ada dua kelompok utama dari distribusi probabilitas, yaitudistribusi diskrit (discrete distribution) dan distribusi kontinyu(continuous distribution). Distribusi diskrit yang sering dipakai adalahdistribusi binomial dan distibusi Poisson. Sedang distribusi kontinyuyang sering banyak dipakai adalah distribusi eksponensial, distribusinormal, distribusi lognormal, distribusi weibull, distribusi Rayleigh,dan distribusi gama.
Konsep yang berkaitan dengan distribusi probabilitas yang akandi bahas pada seksi ini adalah variabel random, fungsi probabilitasmassa (probability mass function), fungsi probabilitas densitas(probability density function), fungsi distribusi kumulatif(cummulative distribution function), nilai harapan (expected value),varian dan deviasi standar. Konsep tersebut di atas sangat diperlukandalam mengevaluasi keandalan dari suatu sistem rekayasa yangberbasis pada waktu.
6.2. Variabel Random
Di dalam mengolah data, ada suatu nilai atau parameter yangakan diukur. Agar teori probabilitas dapat diterapkan maka kejadiandari nilai-nilai ini haruslah random terhadapa waktu (time) atauruang (space) atau kedua-duanya. Parameter dari kejadian yangakan diukur, misal laju kegagalan dari komponen, lama waktu untukmereparasi, kekuatan mekanis dari komponen, adalah variabel yangbervariasi secara random terhadap waktu dan/atau ruang. Variabelrandom ini dapat didefinisikan secara diskrit maupun secara kontinyu.
Sebua variabel random diskrit adalah variabel random yanghanya mempunyai bilangan diskrit pada suatu interval tertentu.Sedang variabel random kontinyu adalah variabel yang mempunyai
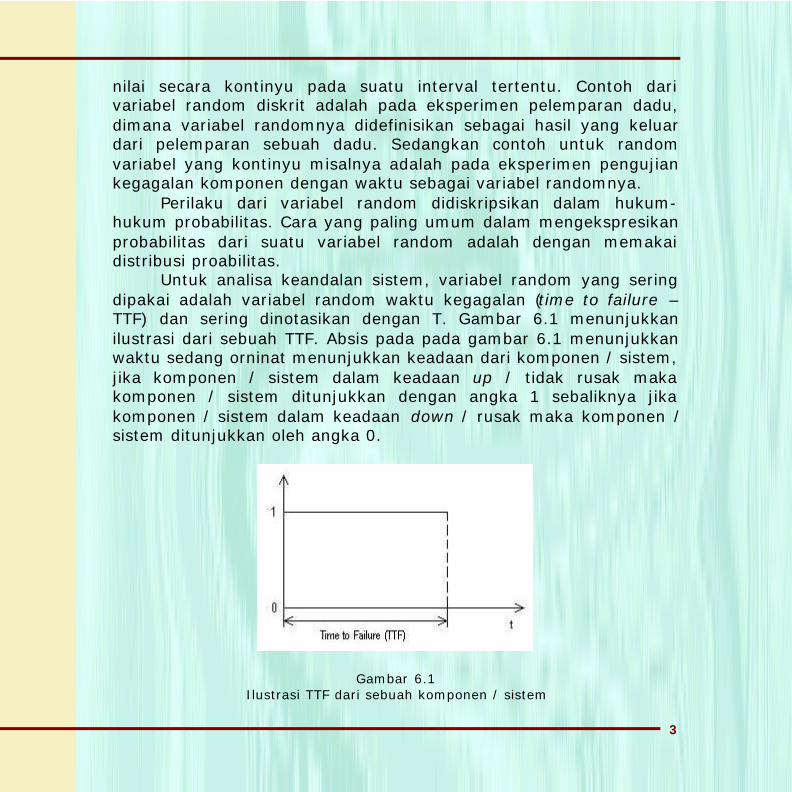
3
nilai secara kontinyu pada suatu interval tertentu. Contoh darivariabel random diskrit adalah pada eksperimen pelemparan dadu,dimana variabel randomnya didefinisikan sebagai hasil yang keluardari pelemparan sebuah dadu. Sedangkan contoh untuk randomvariabel yang kontinyu misalnya adalah pada eksperimen pengujiankegagalan komponen dengan waktu sebagai variabel randomnya.
Perilaku dari variabel random didiskripsikan dalam hukum-hukum probabilitas. Cara yang paling umum dalam mengekspresikanprobabilitas dari suatu variabel random adalah dengan memakaidistribusi proabilitas.
Untuk analisa keandalan sistem, variabel random yang seringdipakai adalah variabel random waktu kegagalan (time to failure –TTF) dan sering dinotasikan dengan T. Gambar 6.1 menunjukkanilustrasi dari sebuah TTF. Absis pada pada gambar 6.1 menunjukkanwaktu sedang orninat menunjukkan keadaan dari komponen / sistem,jika komponen / sistem dalam keadaan up / tidak rusak makakomponen / sistem ditunjukkan dengan angka 1 sebaliknya jikakomponen / sistem dalam keadaan down / rusak maka komponen /sistem ditunjukkan oleh angka 0.
Gambar 6.1Ilustrasi TTF dari sebuah komponen / sistem
4
6.3. Variabel Random Kontinyu
Misalkan T adalah random variabel yang kontinyu dan f(t)mewakili suatu fungsi probabilitas untuk random variabel T. Jika P(a ≤T ≤ b) menyatakan probabilitas dari variabel random t pada interval adan b maka
( ) ∫=≤≤b
a
dttfbTaP )( (6.1)
Fungsi f(t) yang mewakili fungsi probabilitas untuk variabel random Tyang yang kontinyu disebut fungsi probabilitas densitas (probabilitydensity function). Untuk selanjutnya istilah fungsi probabilitasdensitas akan disingkat dengan fpd. Secara umum fungsi probabilitasdensitas memenuhi sifat :
∞<<∞−≥ t , f(t) 0 (6.2)
∫∞
∞−
= 1dttf )( (6.3)
Contoh 6.1
Untuk memberi gambaran mengenai sifat-sifat dari fpd, perhatikanfungsi berikut ini.
f tat t
( ) =≤ ≤
0 5
0 untuk t yang lain
Tentukan nilai a agar fungsi di atas dapat dikategorikan sebagai fpd.
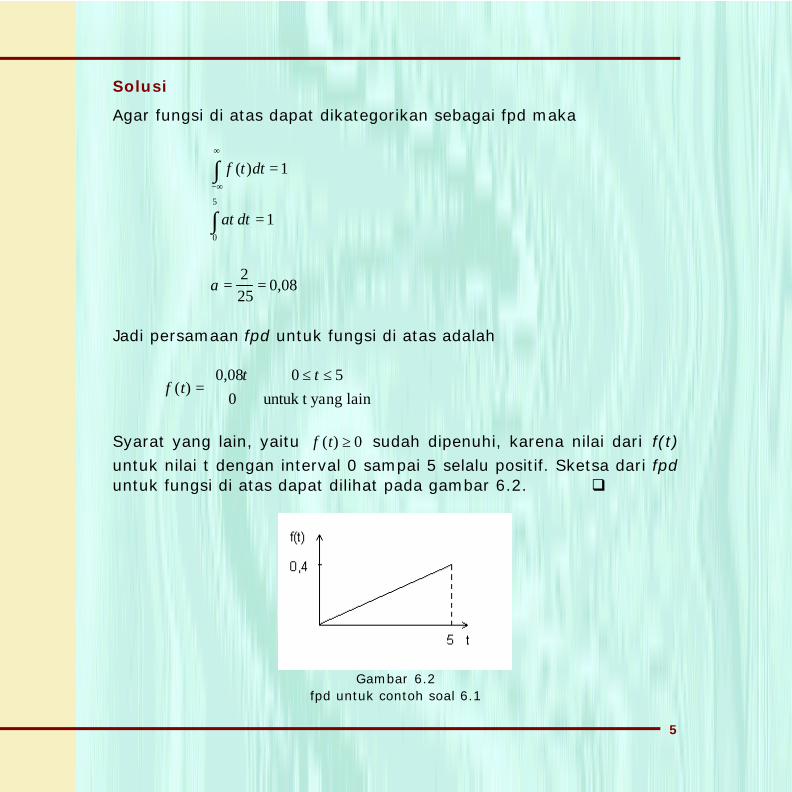
5
Solusi
Agar fungsi di atas dapat dikategorikan sebagai fpd maka
f t dt( ) =−∞
∞
∫ 1
at dt =∫ 10
5
a = =225
0 08,
Jadi persamaan fpd untuk fungsi di atas adalah
f tt t
( ),
=≤ ≤
0 08 0 5
0 untuk t yang lain
Syarat yang lain, yaitu f t( ) ≥ 0 sudah dipenuhi, karena nilai dari f(t)untuk nilai t dengan interval 0 sampai 5 selalu positif. Sketsa dari fpduntuk fungsi di atas dapat dilihat pada gambar 6.2. q
Gambar 6.2fpd untuk contoh soal 6.1
6
Nilai harapan (expectation) dari variabel random T dengan fpdf(t) didefiniskan oleh
( ) ∫∞
∞−
= dtttftE )( (6.4)
Sedang varians (variance) dari f(t) didefinisikan oleh
{ }( ){ }2tEtEtVar −=)( (6.5)
Persamaan (6.5) dapat disederhanakan menjadi
22 )}({)()( tEtEtVar −= (6.6)
Sedang deviasi standar (deviation standard) σ didefinisikan oleh
)(tVar=σ (6.7)
6.4. Variabel Random Diskrit
Jika T adalah random variabel yang diskrit dan f(t) mewakilisuatu fungsi probabilitas untuk random variabel T dan P(T = a)menyatakan probabilitas dari variabel random T pada saat T = a,maka
)()( afaTP == (6.8)
Fungsi f(t) yang mewakili fungsi probabilitas untuk variabelrandom T yang yang diskrit disebut fungsi probabilitas massa
7
(probability mass function). Untuk selanjutnya istilah fungsiprobabilitas densitas akan disingkat dengan pmf. Secara umumfungsi probabilitas densitas memenuhi sifat :
t semuauntuk , )( 0≥tf (6.9)
∑ =t semua
1f(t) (6.10)
Contoh 6.2
Pada sebuah percobaan pelemparan sebuah mata dadu, jika Tmerupakan variabel random yang mewakili mata dadu dan f(t)mewakili probabilitas dari variabel random T, maka hubungan antaravariabel random T dengan probabilitas dapat ditabelkan sebagaiberikut.
T 1 2 3 4 5 6f(t) 1/6 1/6 1/6 1/6 1/6 1/6
Jika hubungan antara variabel random T dan fungsi probabilitas f(t)diplot pada sebuah kurva, akan terlihat bahwa fungsi probabilitas diatas memenuhi sifat-sifat fpm. Sketsa dari fpm untuk fungsi di atasdapat dilihat pada gambar 6.3. q
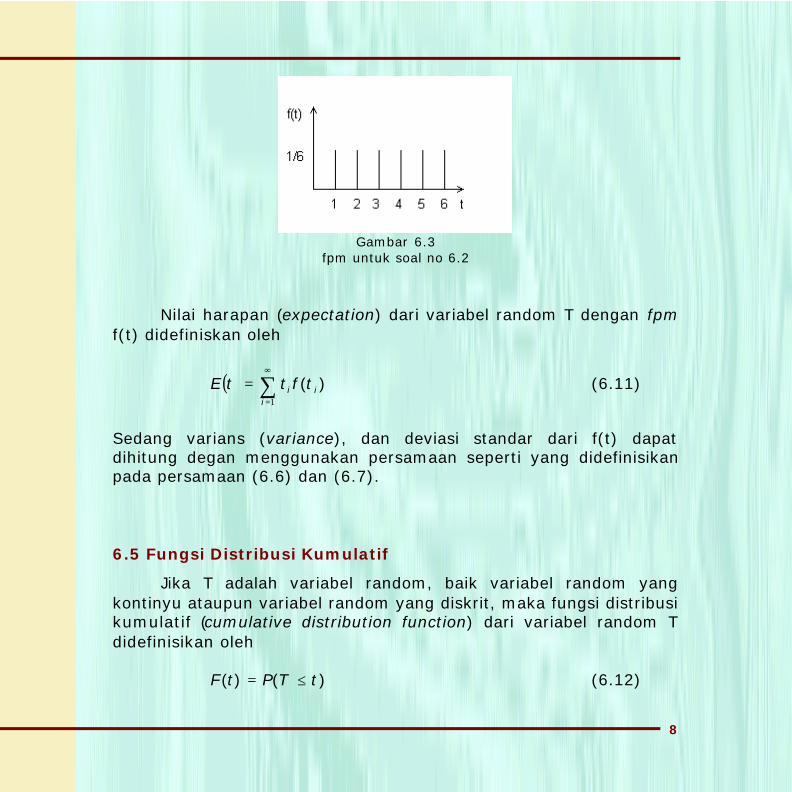
8
Gambar 6.3fpm untuk soal no 6.2
Nilai harapan (expectation) dari variabel random T dengan fpmf(t) didefiniskan oleh
( ) ∑∞
=
=1i
ii tfttE )( (6.11)
Sedang varians (variance), dan deviasi standar dari f(t) dapatdihitung degan menggunakan persamaan seperti yang didefinisikanpada persamaan (6.6) dan (6.7).
6.5 Fungsi Distribusi Kumulatif
Jika T adalah variabel random, baik variabel random yangkontinyu ataupun variabel random yang diskrit, maka fungsi distribusikumulatif (cumulative distribution function) dari variabel random Tdidefinisikan oleh
)()( tTPtF ≤= (6.12)
9
Jika T merupakan variabel random yang kontinyu dengan fpdf(t), maka fungsi distribusi kumulatifnya adalah
∫∞−
=≤≤−∞=t
duuftTPtF )()()( (6.13)
Sedang jika T merupakan variabel random yang diskrit denganfpm f(t), maka fungsi distribusi kumulatifnya adalah
∑≤
=tt
ii
tftF )()( (6.14)
Contoh 6.3
Pada contoh 6.1, fpd dari variabel random T didefinisikan oleh
f tt t
( ),
=≤ ≤
0 08 0 5
0 untuk t yang lain
Dapatkan fungsi distribusi kumulatif dari fungsi di atas.
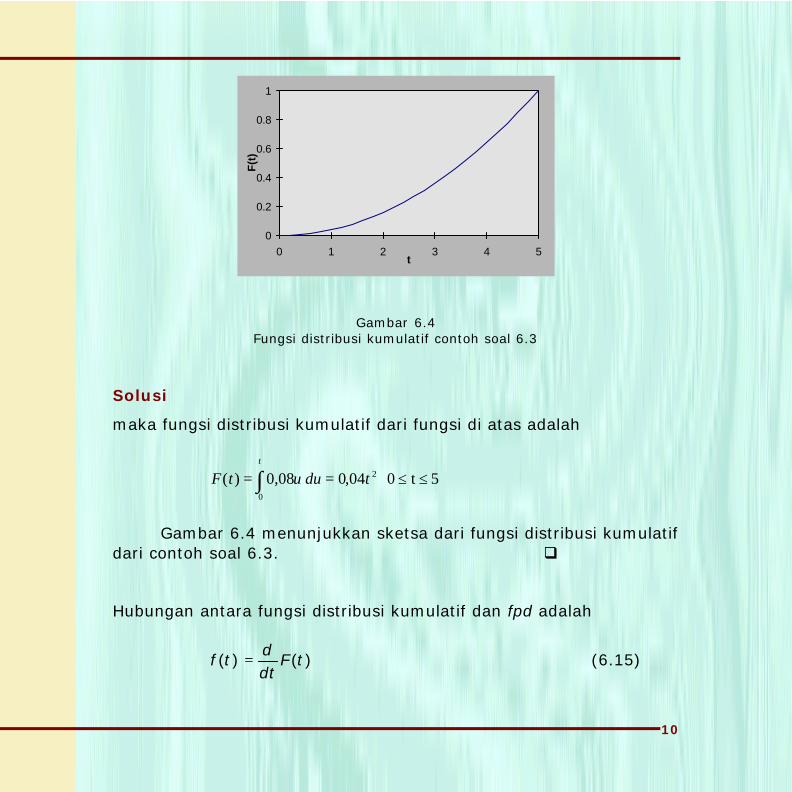
10
0
0.2
0.4
0.6
0.8
1
0 1 2 3 4 5t
F(t
)
Gambar 6.4Fungsi distribusi kumulatif contoh soal 6.3
Solusi
maka fungsi distribusi kumulatif dari fungsi di atas adalah
F t u du tt
( ) , ,= = ≤ ≤∫ 0 08 0 04 2
0
0 t 5
Gambar 6.4 menunjukkan sketsa dari fungsi distribusi kumulatifdari contoh soal 6.3. q
Hubungan antara fungsi distribusi kumulatif dan fpd adalah
)()( tFdtd
tf = (6.15)
11
6.6. Terminologi Keandalan
Fungsi distribusi kumulatif nilainya akan naik mulai dari nolsampai satu seiring dengan naiknya nilai variabel random dari yangterkecil sampai yang terbesar. Fungsi distribusi ini bertambah sepertianak tangga untuk variabel random diskrit dan bertambah sepertikurva yang kontinyu untuk random variabel yang kontinyu.
Dalam mengevaluasi keandalan suatu sistem, variabel randomyang dipakai umumnya adalah waktu. Pada saat t = 0 komponenatau sistem berada dalam kondisi akan beroperasi, sehinggaprobabilitas komponen atau sistem itu untuk mengalami kegagalanpada saat t = 0 adalah 0. Pada saat t à ∞ probabilitas untukmengalami kegagalan dari suatu komponen atau sistem yangdioperasikan akan cenderung mendekati 1. Karakteristik ini samadengan fungsi distribusi kumulatif. Fungsi distribusi kumulatif ini akanmengukur probabilitas kegagalan dari suatu sistem atau komponensebagai fungsi dari waktu. Dalam terminologi keandalan fungsidistribusi kumulatif ini dikenal sebagai fungsi distribusi kegagalankumulatif (cumulative failure distribution function) atau disingkatdistribusi kegagalan kumulatif (cumulative failure distribution).Distribusi kegagalan kumulatif ini biasanya dilambangkan denganQ(t).
Jika R(t) menyatakan fungsi keandalan dari suatu komponenatau suatu sistem sebagai fungsi waktu maka hubungan antara fungsikeandalan R(t) dan distribusi kegagalan kumulatif atau fungsiketakandalan Q(t) dihubungkan oleh sebuah formula di bawah ini.
)()( tQtR −= 1 (6.16)
Persamaan (6.15) menunjukkan bahwa fungsi distribusi probabilitasmerupakan turunan dari distribusi probabilitas kumulatif. Dalam
12
terminologi keandalan fungsi distribusi probabilitas ini disebut denganfungsi densitas kegagalan (failure density function). Fungsi densitaskegagalan ini, yang dinotasikan dengan f(t), dapat diturunkan baikdari fungsi ketakandalan maupun fungsi keandalan seperti padaformula di bawah ini.
dttdR
dttdQ
tf)()(
)( −== (6.17)
Sebaliknya fungsi ketakandalan maupun fungsi keandalandapat diperoleh dari fungsi densitas kegagalan seperti yang dituliskandalam formulasi di bawah ini.
∫=t
dttftQ0
)()( (6.18)
dan
∫∫∞
=−=t
t
dttfdttftR )( )()(0
1 (6.19)
Gambar 6.5 menunjukkan sebuah tipikal kurva fungsi densitaskegagalan. Sesuai dengan formulasi fungsi ketakandalan dankeandalan yang ditunjukkan pada rumus (6.18) dan (6.19) makaluasan daearah di bawah kurva untuk interval mulai dari 0 sampai tmewakili fungsi ketakandalan sedang luasan daerah di bawah kurvauntuk interval mulai dari t sampai tak hingga.
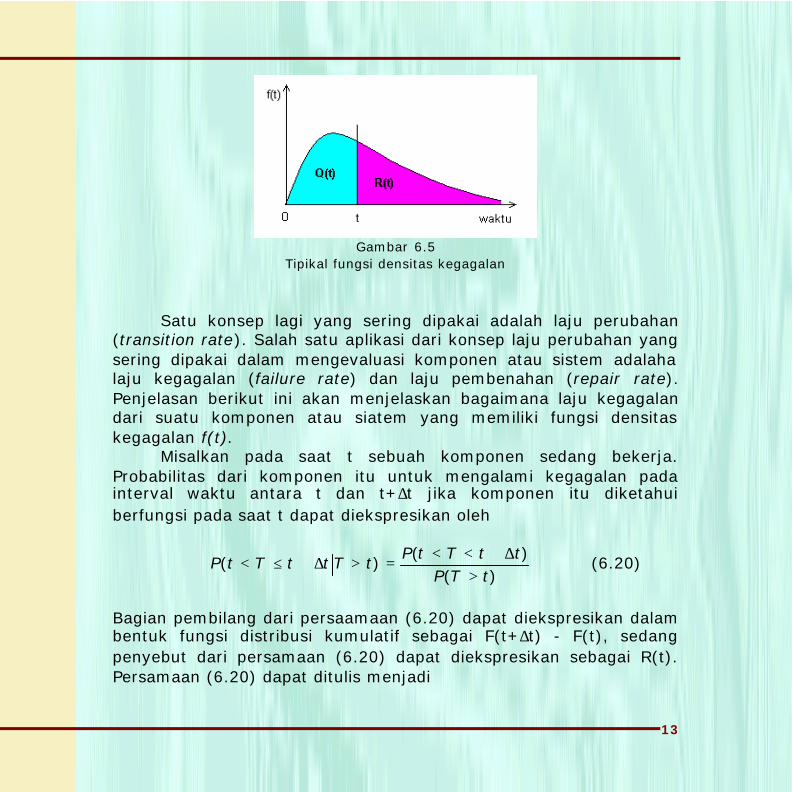
13
Gambar 6.5Tipikal fungsi densitas kegagalan
Satu konsep lagi yang sering dipakai adalah laju perubahan(transition rate). Salah satu aplikasi dari konsep laju perubahan yangsering dipakai dalam mengevaluasi komponen atau sistem adalahalaju kegagalan (failure rate) dan laju pembenahan (repair rate).Penjelasan berikut ini akan menjelaskan bagaimana laju kegagalandari suatu komponen atau siatem yang memiliki fungsi densitaskegagalan f(t).
Misalkan pada saat t sebuah komponen sedang bekerja.Probabilitas dari komponen itu untuk mengalami kegagalan padainterval waktu antara t dan t+∆t jika komponen itu diketahuiberfungsi pada saat t dapat diekspresikan oleh
)()(
)(tTP
ttTtPtTttTtP
>∆+<<=>∆+≤< (6.20)
Bagian pembilang dari persaamaan (6.20) dapat diekspresikan dalambentuk fungsi distribusi kumulatif sebagai F(t+∆t) - F(t), sedangpenyebut dari persamaan (6.20) dapat diekspresikan sebagai R(t).Persamaan (6.20) dapat ditulis menjadi
14
)()()(
)(tR
tFttFtTttTtP
−∆+=>∆+≤< (6.21)
Dengan membagi ekspresi probabilitas pada persamaan (6.20) atau(6.21) dengan interval waktu ∆t dan membuat ∆t à 0, maka akandiperoleh laju kegagalan dari suatu komponen dan diekspresikandengan notasi z(t).
)()()(lim
)(tRt
tFttFt
tz1
0⋅
∆−∆+
→∆= (6.22)
Ekspresi t
tFttFt ∆
−∆+→∆
)()(lim0
pada persamaan (6.22) adalah sama
identik dengan persamaan (6.15), sehingga persamaan (6.22) dapatdisederhanakan menjadi
)()(
)(tRtf
tz = (6.23)
Dengan mensubstitusikan persamaan (6.17) ke persamaan (6.23),maka akan diperoleh
dttdR
tRtz
)()(
)(1−= (6.24)
Dengan mengintegralkan kedua ruas dari 0 sampai t, danmensubstitusikan nilai R(0) = 1, maka persamaan (6.24) akanmenjadi
15
∫ −=t
tRdttz0
)(ln)( (6.25)
atau
∫=
−t
duuz
etR 0
)(
)( (6.26)
Untuk kasus yang khusus dimana laju kegagalan suatukomponen adalah konstan, z(t) = λ ,maka persamaan (6.26) akanberubah menjadi
tetR λ−=)( (6.27)
yang merupakan ekspresi fungsi keandalan dari suatu komponenatau sistem yang mengikuti distribusi eksponensial.
Waktu rata-rata kegagalan (mean time to failure = MTTF) darisuatu komponen yang memiliki fungsi densitas kegagalan (failuredensity function) f(t) didefinisikan oleh nilai harapan dari komponenitu. Secara matematis waktu rata-rata kegagalan dapat diekspresikansebagai
∫∞
==0
dtttfTEMTTF )()( (6.28)
Dengan mensubstitusikan persamaan (6.17) ke dalam persamaan(6.28), maka akan diperoleh
16
∫∞
−=0
dtttRMTTF )(' (6.29)
Persamaan (6.29) dapat diselesaikan dengan memakai integralparsial
[ ]MTTF tR t R t dt= − +∞∞
∫( ) ( )0
0
Jika MTTF < ∞, maka nilai dari [ ]tR t( ) 0 0∞ = , sehingga persamaan di
atas menjadi
∫∞
=0
dttRMTTF )( (6.30)
Persamaan (6.30) lebih banyak dipakai untuk mendapatkan MTTFsuatu komponen. Untuk kasus komponen yang memiliki fungsikeandalan R t e t( ) = −λ , maka MTTF dari komponen itu adalah
∫∞
− ==0
1λ
λ dteMTTF t (6.31)
6.7 Kurva Laju Kegagalan
Laju kegagalan dari suatu komponen atau sistem dapat di plotpada suatu kurva dengan variabel random waktu sebagai absis danlaju kegagalan dari komponen atau sistem sebagai ordinat. Kurva lajukegagalan klasik yang sering dipakai untuk menjelaskan perilaku dari
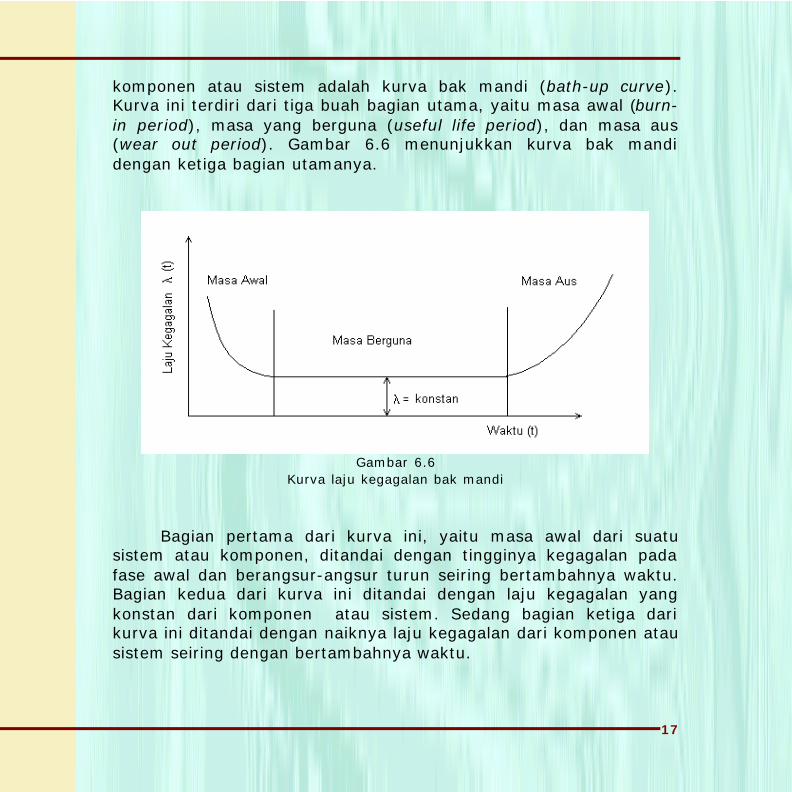
17
komponen atau sistem adalah kurva bak mandi (bath-up curve).Kurva ini terdiri dari tiga buah bagian utama, yaitu masa awal (burn-in period), masa yang berguna (useful life period), dan masa aus(wear out period). Gambar 6.6 menunjukkan kurva bak mandidengan ketiga bagian utamanya.
Gambar 6.6Kurva laju kegagalan bak mandi
Bagian pertama dari kurva ini, yaitu masa awal dari suatusistem atau komponen, ditandai dengan tingginya kegagalan padafase awal dan berangsur-angsur turun seiring bertambahnya waktu.Bagian kedua dari kurva ini ditandai dengan laju kegagalan yangkonstan dari komponen atau sistem. Sedang bagian ketiga darikurva ini ditandai dengan naiknya laju kegagalan dari komponen atausistem seiring dengan bertambahnya waktu.
18
6.8 Distribusi Binomial
Misalkan R menyatakan probabilitas sukses dari suatu kejadiandan Q menyatakan proabilitas gagal dari suatu even, sehingga R + Q= 1 dan probabilitas dari R dan Q adalah tetap. Jika ada n kali trialyang diulang maka proabilitas k kali sukses dari n kali trial dengan Tsebagai variabel random dapat dituliskan dalam distribusi binomialsebagai
knkQRkn
kTP −
== )( (6.32)
Sedangkan rata-rata (mean), varian (variance), dan standar deviasidari distribusi binomial dapat diekspresikan oleh persamaan-persamaan berikut.
nR=µ (6.33)
nRQ=2σ (6.34)
nRQ=σ (6.35)
Contoh 6.4
Sebuah subsistem terdiri dari dari tiga buah komponen yangmasing-masing memiliki probabilitas kesusksesan untuk menjalankanfungsinya 0,95. Agar subsiistem ini dapat berfungsi dengan normal,diperlukan minimal dua komponen yang berfungsi dengan baik.Tentukan probabilitas dari subsistem itu untuk suskes menjalankanfungsinya.
19
Solusi
§ Probabilitas sukses untuk tiap komponen, R = 0,95 sehingga Q =0,05. Agar subsistem itu sukses menjalankan fungsinya, harus adaminimal 2 buah komponen yang berfungsi.
§ Ada 3 buah komponen yang identik, ini sama halnya kitamelakukan tiga kali trial untuk sebuah komponen, jadi probabilitassubsistem itu untuk sukses menjalankan fungsinya adalah
P R R Q( ) ( , ) ( , ) ( , ) ,sukes =
+
= + × × =
3
3
3
20 95 3 0 95 0 05 0 992753 2 3 2 q
6.9 Distribusi Poisson
Distribusi Poisson mewakili probabilitas dari sebuah kejadianyang diisolasi pada suatu interval waktu kontinyu tertentu untuk lajukegagalan yang konstan. Karakteristik khusus dari distribusi Poissonadalah distribusi hanya memperhitungkan kejadian dari satu eventtertentu sedangkan evant lain yang tidak termasuk dalam kejadiantidak diperhitungkan. Ini yang membedakan antara distribusi Poissondan distribusi binomial. Jika distribusi binomial memperhitungkanbaik probabilitas untuk suskes dan gagal dari suatu event makadistribusi Poisson hanya memperhitungkan probabilitas kegagalanatau kesuksesan dari suatu event.
Distribusi Poisson termasuk salah satu distribusi yang diskrit.Fungsi probabilitas massa dari distribusi Poisson dengan T sebagaivariabel random didefinisikan oleh
!)(
)(ket
kTPtk λλ −
== (6.36)
20
dengan k bilangan bulat positif.
Sedangkan rata-rata (mean), varian (variance), dan standardeviasi dari distribusi Poisson dapat diekspresikan oleh persamaan-persamaan berikut.
tλµ = (6.37)
tλσ =2 (6.38)
tλσ = (6.39)
Contoh 6.5
Pada sebuah sistem instalasi pipa, jumlah kegagalan pipa per tahunper 1000 meter adalah 0,3. Jika diambil pipa sepanjang 100 metersebagai sample, hitung probabilitas pipa itu untuk mengalamikegagalan sebanyak 3 kali untuk periode (a) 5 tahun dan (b) 10tahun.
Solusi
Laju kegagalan dari pipa adalah
λ =×
=( ,
,0 03 100
10000 003
kegagalan / tahun) m m
kegagalan / tahun
a. Untuk periode 5 tahun
µ λ= = × =t 0 003 5 0 015, ,
21
P Te
( )( , )
!,
,
= = = ×−
−30 015
35 54 10
3 0 0157 q
b. Untuk periode 10 tahun
µ λ= = × =t 0 003 10 0 03, ,
P Te
( )( , )
!,
,
= = = ×−
−30 03
34 37 10
3 0 036 q
6.10 Distribusi Normal
Distribusi normal, yang seringkali direfer sebagai distribusiGaussian, merupakan distribusi probabilitas yang paling banyak dansering dipakai. Dalam kaitannya dengan keandalan, distribusi inibanyak dipakai pada cabang keandalan struktur (structuralreliability).
Kurva fungsi probabilitas densitas dari ditribusi normal memilikibentuk simetris yang sempurna terhadap nilai rata – ratanya (meanvalue) dan dispersi terhadap mean diukur dengan deviasi standarnya.Bentuk yang presisi dan posisi dari fungsi densitas dapat ditentukanhanya dengan term mean dan standar deviasi saja. Sifat inimenghasilkan kemungkinan bagi distribusi normal untuk disalah-pakaikan (misused) karena semua distribusi dapat dikarakterisasioleh mean dan standar deviasi. Dengan hanya menentukan mean danstandar deviasi, amat mungkin bahwa distribusi yang bukan normalakan diasumsikan memiliki distribusi normal, karena tidak informasitambahan lain yang tersedia selain mean dan standar deviasi. Satu
22
teorema yang sering dirujuk, dan sekali lagi besar kemungkinan jugadisalh-pakaikan adalah Central Limit Theorem (CLT).
Jika time to failure dari suatu komponen adalah T mengikutidistribusi normal, maka pdf nya dapat diekspresikan sebagai
2
2
1
2
1)(
−−
= t
t
e
t
tfσ
µ
πσ(6.40)
denganσ = deviasi standarµ = rata-rata/ mean
Fungsi keandalan dari sebuah komponen yang memiliki distribusinormal dapat ditulis sebagai
∫∞ −
Φ−=
−−
=
t t
tdtt
t
e
t
tRσ
µσ
µ
πσ1
2
2
1
2
1)( (6.50)
sedangkan fungsi unreliability-nya adalah
−Φ=
t
ttQ
σ
µ)( (6.51)
Mean time to failure dari distribusi normal ini adalah
MTTF =µ (6.52)
23
6.11 Distribusi Lognormal
Distribusi lognormal berhubungan dengan distribusi normal.Time to failure, dari suatu komponen dikatakan memiliki distribusilognormal bola y = ln T mengikuti distribusi normal dengan rata-rata−T dan varians σ
−T . Probability density function dari distribusi
lognormal adalah
dtT
Tt
e
Tt
tf
2
21
2
1
−
−−−
−= '
'ln
'
)(σ
πσ(6.53)
Fungsi keandalan dari komponen yang mengikuti distribusilognormal adalah
∫∞
−
−−
−
−=
0
2
21
2
1dtT
Tt
e
T
ttR '
'ln
'
)(
σ
πσ(6.54)
sedang fungsi ketakandalannya adalah
24
tdT
Tt
et
Tt
tQ
2
'
'ln
2
1
2'
11)(
−
−−
−∫∞
−−=
σ
πσ(6.55)
6.12 Distribusi Eksponensial
Distribusi eksponensial merupakan distribusi yang palingbanyak dipakai di dalam mengevaluasi keandalan sistem. Ciri utamadari distibusi ini adalah laju kegagalannya yang konstan.
Jika waktu untuk galal (time to failure) dari suatu komponenadalah T terdistribusi secara eksponensial dengan parameter λ, makafungsi densitas probabilitas dapat diekspresikan sebagai
tetf λλ −=)( (6.56)
Sedangkan fungsi keandalannya adalah
∫∞
−==t
teduuftR λ)()( (6.57)
Dengan demikian fungsi ketakandalannya dapat ditulis sebagai
tetRtQ λ−−=−= 11 )()( (6.58)
25
Waktu rata-rata kegagalan dari komponen itu adalah
∫∞
==0
1λ
dttRMTTF )( (6.59)
Yang menarik dari distribusi ini adalah jika komponen yang memiliki
distribusi eksponen ini dioperasikan sampai MTTF-nya, atau t =1λ
,
maka keandalan dari komponen itu dapat diprediksi dengan memakaipersamaan (6.59), yaitu
( )R e e( ) ,3711
1 0λλ λ= = =− −
Jadi bila sebuah komponen yang memiliki fungsi densitaskegagalan yang mengikuti distribusi eksponensial bila dioperasikandengan durasi sampai pada MTTF-nya, maka keandalan darikomponen itu hanya tinggal 37%.
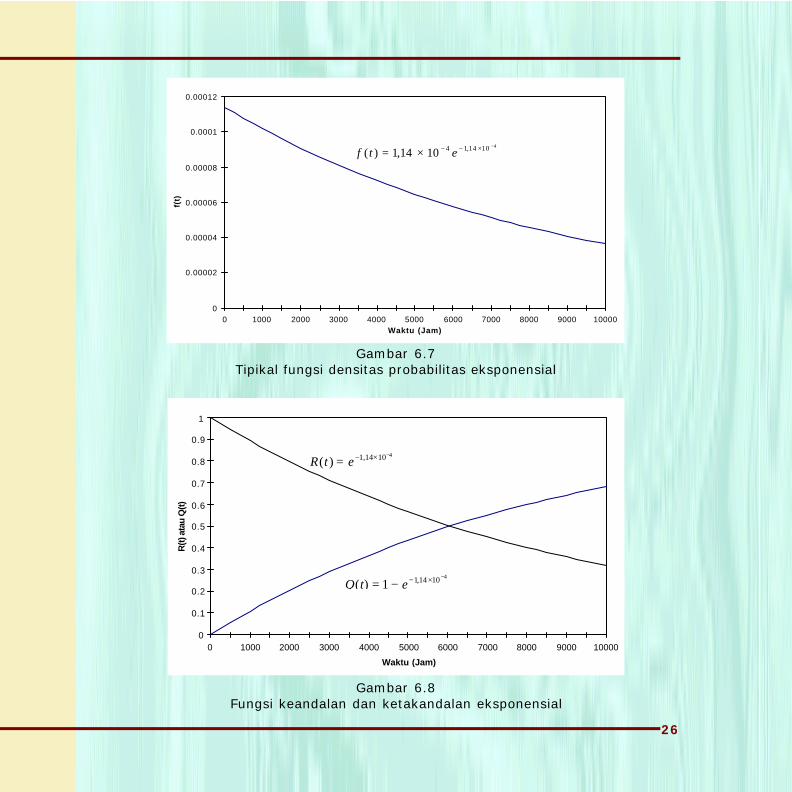
26
0
0.00002
0.00004
0.00006
0.00008
0.0001
0.00012
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000Waktu (Jam)
f(t)
f t e( ) , ,= × − − × −
1 14 10 4 1 14 10 4
Gambar 6.7Tipikal fungsi densitas probabilitas eksponensial
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 10000
Waktu (Jam)
R(t)
ata
u Q
(t)
R t e( ) ,= − × −1 14 10 4
Q t e( ) ,= − − × −
1 114 10 4
Gambar 6.8Fungsi keandalan dan ketakandalan eksponensial
27
Laju kegagalan dari komponen yang memiliki fungsi densitaskegagalan yang mengikuti distribusi eksponensial dapat diturunkandengan menerapkan persamaan (6.23).
λλλ
λ
===−
−
t
t
ee
tRtf
tz)()(
)( (6.60)
Tipikal kurva dari distribusi eksponensial untuk λ = 1.14x10-4
kegagalan/jam dapat dilihat pada gambar 6.7. Sedang fungsikeandalan dan ketakandalannya dapat dilihat pada gambar 6.8.
Misalkan komponen yang memiliki fungsi densitas kegagalanyang mengikuti distribusi eksponensial telah berioperasi selama t.Untuk mengevaluasi probabilitas kegagalan dari komponen itu padainterval waktu τ, probabilitas kegagalan dari komponen itu tidak bisadihitung secara a priori atau independen dari waktu pengoperasiansebelumnya sampai waktu t. Alasannya adalah, jika pada interval(0,t) maka komponen itu tidak bisa gagal pada interval (t,t+τ). Olehkarena itu untuk mengevaluasi probabilitas kegagalan dari komponenitu selama periode waktu τ adalah penting untuk mempertimbangkanprobabilitas kegagalan selama periode waktu (0,t). Probabilitaskegagalan selama waktu τ dikenal sebagai probabilitas a posteriori,yaitu harga dari probabilitas kegagalannya tergantung dari sejarahkomponen yang terdahulu.
Misalkan T adalah waktu kegagalan (time to failure) dari suatukomponen yang mengikuti distribusi eksponensial, maka akanberlaku probabilitas kondisional di bawah ini
λτλ
τλττ −−
+−
=>
+>=>+> ee
etTP
tTPtTtTP
t
t )(
=)(
)()( (6.61)
28
Persamaan (6.61) menunjukkan probabilitas dari suatukomponen yang akan berfungsi pada interval t+τ jika diketahuibahwa komponen itu berfungsi pada saat t tidak tergantung dariwaktu operasional sebelumnya, dalam hal ini waktu operasionalkomponen itu adalah t. Sifat ini disebut sebagai sifat tak bermemori(memory less property) dari distribusi eksponensial.
Kembali kepada probabilitas a priori dan probabilitas aposteriori, jelas bahwa probabilitas kegagalan dari komponen yangmengikuti distribusi eksponensial tidak tergantung dari sejarahkomponen yang terdahulu. Atau dengan kata lain untuk distribusieksponensial, probabilitas a priori dan probabilitas a posteriori adalahsama. Hal ini tidak berlaku untuk komponen-komponen lain yangmengikuti distribusi probabilitas selain distribusi eksponensial.
6.13 Distribusi Weibull
Selain distribusi eksponensial yang sering dipakai di dalammengevaluasi keandalan sistem, distribusi weibull banyak dipakaikarena distribusi ini memiliki shape parameter sehingga distribusimampu untuk memodelkan barbagai data.
Jika time to failure dari suatu komponen adalah T mengikutidistribusi Weibull dengan tiga parameter β,η, dan γ, maka pdf nyadapat diekspresikan sebagai
βγβ
η
γ
η
β
−−−
−=
t
et
tf
1
)( (6.62)
dengan
29
β = shape parameter, β > 0η = scale parameter, η > 0γ = shape parameter, γ < first time to failure
jika nilai dari γ = 0, maka akan diperoleh distribusi Weibull dengandua parameter. Beberapa karakteristik dari distribusi Weibullberdasarkan adalah
§ Untuk 0 < β < 1, laju kegagalan ( failure rate ) akan berkurangseiring bertambahnya waktu.
§ Untuk β = 1, maka failure rate-nya adalah konstan.§ Untuk β > 1, laju kegagalan (failure rate) akan bertambah seiring
bertambahnya waktu.
Sedangkan fungsi reliability-nya adalahβ
η
γ
−
−=
t
etR )( (6.63)
dan fungsi unreliability-nya dapat ditulis sebagai
β
η
γ
−
−−=
t
etQ 1)( (6.64)
Mean time to failure dari distribusi Weibull itu adalah
+Γ+= 11
βηγMTTF (6.65)
30
dimana ( )Γ menyatakan fungsi gamma
6.14 Goodness-of-fit test
Jika ada sekumpulan data waktu kegagalan (TTF) dari sebuahkomponen, kita tidak bisa langsung menyimpulkan bahwa datatersebut memiliki distribusi normal untuk memodelkan kegagalansistem, kecuali ada bukti – bukti fisik yang menunjang. Pertanyaanyang timbul adalah seberapa tepat data yang ada memilikikesesuaian dengan distribusi probabilitas tertentu untuk memodelkankegagalan komponen. Pertanyaan ini dapat dilakukan denganmelakukan uji kesesuaian (goodness-of-fit test).
Ada berbagai metode untuk mlakukan pengujian ini, sepertimaximum likelihood estimate (MLE), chi-square test (χ2), danKolmorov – Smirnov (K-S) tets. Bagi pembaca yang menginginkanmempulajari metode ini lebih detail, dianjurkan untuk mereferreferensi 2 dan 3. Sedangkan bagi para pembaca yang menginginkanmemakai bantuan software dalam mengolah dan menganalisa data,ada beberapa software komersial yang yang bisa dipakai danmenyediakan fasilitas untuk analisa data seperti yang telahdisebutkan di atas, diantaranya SPSS dan Weibull ++.
31
6.15 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
3. Lawless, J.F. [1982], Statistical Models and Methods for LifetimeData, John Willey and Sons< New York.
KEMBALI KE DAFTAR ISI MODUL 3
32
Model Keandalan Dinamis
7.1 Pendahuluan
Prosedur standar untuk mengevaluasi keandalan dari suatusistem adalah dengan memecah sistem itu menjadi beberapakomponen. Langkah berikutnya adalah mengestimasi keandalan darimasing-masing komponen. Nilai keandalan dari masing-masingkomponen ini bisa diperoleh dengan jalan memperkirakan keandalanuntuk masing-masing komponen berdasarkan pengalaman,mengambil dari database keandalan yang sudah ada, atau denganmengumpulkan data pengoperasian dari tiap-tiap komponen yangbersangkutan kemudian mengolahnya menjadi data keandalan yangsiap pakai. Setelah masing-masing angka keandalan dari masing-masing komponen diketahui, baru keandalan dari sistem tersebutdapat dievaluasi dengan memakai prosedur standar untukmengevaluasi keandalan.
Untuk mengevaluasi keandalan dari suatu sitem denganmemakai pemodelan keandalan statis adalah mudah. Hal inidikarenanakan angka keandalan dari masing-masing komponen yangada adalah konstan. Artinya angka keandalan ini tidak tergantung
33
dari waktu. Teknik evaluasi dengan menerapkan pemodelankeandalan statis seperti ini sangat berguna pada desain permulaansuatu sistem, dimana berbagai konfigurasi sistem dicoba untukdievaluasi keandalannya.
Kenyataan yang ada di lapangan adalah keandalan dari suatusistem atau komponen akan tergantung terhadap waktu. Untuk itukeandalan dari masing-masing komponen, subsitem atau sistem akanjuga tergantung terhadap waktu. Untuk itu keandalan dari masing-masing komponen, subsistem atau sistem ini akan diwakili oleh suatufungsi densitas probabilitas tertentu yang merupakan fungsi dariwaktu. Beberapa distribusi probabilitas yang banyak dipakai dalammengevaluasi keandalan sudah disinggung pada bab 6.
Lain halnya dengan bab terdahulu yang membahas pemodelankeandalan statis dari suatu sistem, dimana keandalan dari masing-masing komponen dianggap konstan dan tidak tergantung padawaktu, maka pada bab ini akan membahas model keandalan dinamisdari suatu sistem. Model keandalan dinamis ini akan melibatkanwaktu artinya keandalan dari masing-masing komponen atau sistemakan tergantung dari waktu. Oleh karenan itu, pemodelan keandalanyang tergantung waktu lebih sulit bila dibandingkan denganpemodelan keandalan statis.
Beberapa model keandalan yang sudah dibahas pada bab 3akan dibahas lagi pada bab ini tetapi dengan melibatkan distribusiprobabilitas eksponensial untuk masing-masing komponen yang adadi dalam sistem.
7.2 Sistem dengan Susunan Seri
Misalkan dua buah komponen yang disusun secara seri memilikifungsi keandalan masing-masing R1(t) dan R2(t). Probabilitas dari
34
sistem itu untuk tetap beroperasi untuk suatu periode waktu t dapatdiekspresikan sebagai
)()()( tRtRtRS 21= (7.1)
Dengan memanfaatkan persamaan 5.26 untuk mengekspresikankeandalan dari masing-masing komponen maka persamaan 6.2 dapatditulis sebagai
∫∫=
−−tt
dzdz
S eetR 0
2
0
1 ττττ ) () (
)( (7.2)
Sedang untuk sistem dengan n buah komponen dalam susunan seri,keandalan dari sistemnya dapat diekspresikan dengan persamaanberikut ini
∫Π=
−
=
t
i dzn
iS etR 0
1
ττ ) (
)( (7.3)
Untuk kasus khusus, dimana masing-masing komponenmengikuti distribusi eksponensial maka persamaan (7.2) menjadi
tttS eeetR )()( 2121 λλλλ +−−− == (7.4)
sedang persamaan 6(7.3) akan berubah menjadi
∑=Π= =
−−
=
n
ii
i
tt
n
iS eetR 1
1
λλ)( (7.5)
35
Fungsi densitas kegagalan untuk n buah komponen dalamsusunan seri yang masing-masing komponennya mengikuti distribusieksponensial dapat diperoleh dengan memanfaatkan persamaan5.17. Fungsi densitas kegagalannya adalah
∑×∑= =
−
=
n
iitn
iiS etf 1
1
λ
λ)( (7.6)
Sedang laju kegagalannya adalah
∑=
===n
ii
S
SSS tR
tftz
1
λλ)()(
)( (7.7)
yang merupakan penjumlahan laju kegagalan dari masing-masingkomponen.
Waktu rata-rata kegagalan dari konfigurasi seri ini dapatdihitung dengan memakai persamaan (6.19).
∑∫∫
=
∞ −∞
=∑
== =
n
ii
t
S dtedttRMTTF
n
ii
1
00
11
)(λ
λ
(7.8)
Contoh 7.1
Sebuah subsistem kontrol terdiri dari dua buah modul yangmempunyai konfigurasi seri. Masing-masing modul ini mempunyailaju kegagalan yang konstan yaitu 3 kegagalan per satu juta jamuntuk modul pertama dan 5 kegagalan per satu jam.a. Hitung laju kegagalan dari subsistem kontrol tersebut.b. Hitung keandalan dari subsistem itu bila dioperasikan 200 jam.
36
c. Setelah subsistem itu dioperasikan 200 jam (soal b), subsistem itudioperasikan lagi selama 50 jam, hitung keandalan dari sistem itu.
d. Waktu rata-rata kegagalan dari subsistem kontrol tersebut.
Solusi
Laju kegagalan dari masing-masing modul adalah konstan, jadimodul-modul ini mengikuti distribusi eksponensial.§ Laju kegagalan dari modul1 adalah
λ1 61 63
103 10= = ×− − jam jam -1
§ Laju kegagalan dari modul 2 adalah
λ2 61 65
105 10= = ×− − jam jam -1
a. Dengan menggunakan persamaan (7.7), laju kegagalan darisubsistem kontrol tersebut di atas adalah
λ λ λS = + = × −1 2
68 10 jam -1 q
b. Fungsi keandalan dari sistem itu adalah
λ λ λS= + = × −1 2
68 10 jam-1
Untuk misi pengoperasian selama 200 jam maka keandalan darisubsistem kontrol itu adalah
R eS ( ) ,( )( )200 0 99848 10 2006
= =− × −
q
c. Untuk misi pengoperasian dengan durasi 50 jam setelahsebelumnya dioperasikan 200 jam, keandalan dari subsistem itu
37
dapat dihitung dengan memakai teori probabilitas kondisional.Misalkan T adalah waktu kegagalan (time to failure) dari susbsitemkontrol, maka ekspresi probabilitas kondisional untuk masalah diatas adalah
R P T TP T
P T( , ) ( )
( )( )
200 50 200 50 200250200
= > + > =>>
RR
R
e
ee( , )
( )( )
( )( )
( )( )( )( )200 50
250200
8 10 250
8 10 2008 10 50
6
6
6
= = =− ×
− ×− ×
−
−
−
R( , ) ,200 50 0 9996= q
Contoh di atas merupakan contoh dari sifat tak bermemori(memory less property) dari distribusi eksponensial.
d. Waktu rata-rata kegagalan dari subsistem kontrol itu adalah
MTTF R t dtSS
= = =×
=−
∞
∫ ( ) . jam1 1
8 10125 0006
0 λq
7.3 Sistem dengan Susunan Paralel
Jika dua buah komponen yang disusun secara paralel memilikifungsi ketakandalan masing-masing Q1(t) dan Q2(t), makaprobabilitas dari sistem itu untuk mengalami kegagalan untuk suatuperiode waktu t dapat diekspresikan sebagai
)()()( tQtQtQP 21= (7.9)
Sedangkan ekspresi keandalan untuk kedua komponen itu adalah
38
)()()()()( tRtRtRtRtRP 2121 −+= (7.10)
atau
∫∫−
∫+
∫=
−−−−tttt
dzdzdzdz
P eeeetR 02
01
02
01 ττττττττ ) () () () (
)( (7.11)
Sedang untuk n buah komponen yang mempunyai susunan paralel,fungsi ketakandalannya adalah
)()()()(∫
−Π=Π=−
==
t
dzn
ii
n
iP etQtQ 0111
ττ
(7.12)
sedang keandalannya adalah
)()()(∫
−Π−=−
=
t
dzn
iP etR 0111
ττ
(7.13)
Untuk komponen-komponen yang mengikuti distribusieksponensial, maka persamaan (7.11) berubah menjadi
tttP eeetR )()( 2121 λλλλ +−−− −+= (7.14)
Sedang persamaan (7.12) dan (7.13) akan masing-masingakan berubah menjadi
)()()( tn
ii
n
iPietQtQ λ−
==−Π=Π= 1
11(7.15)
dan
39
)()()( tn
ii
n
iPietQtR λ−
==−Π−=Π−= 111
11(7.16)
Dari persamaan (7.16) dapat disimpulkan bahwa meskipunmasing-masing komponen dari sistem yang memiliki konfigurasiparalel mengikuti distribusi eksponensial, fungsi keandalannya bukanmerupakan fungsi keandalan yang mengikuti distribusi eksponensial.Dengan demikian laju kegagalan dari sistem yang memilikikonfigurasi paralel bukan merupakan laju kegagalan yang konstan,tetapi merupakan fungsi dari waktu.
Waktu rata-rata kegagalan untuk dua buah komponen yangmengikuti distribusi eksponensial dengan konfigurasi paralel adalah
dteeedttRMTTF tttP ∫∫
∞+−−−
∞
−+==00
2121 )( )( )( λλλλ (7.17a)
2121
111λλλλ +
−+=MTTF (7.17b)
Contoh 7.2
Jika sub-sistem kontrol pada contoh soal 7.1 disusun secara paralel,tentukan :a. Indeks keandalan dari subsistem itu bila dioperasikan 200 jam.b. Waktu rata-rata kegagalan (MTTF) dari subsistem kontrol tersebut.
Solusi
Laju kegagalan dari masing-masing modul adalah konstan, jadimodul-modul ini mengikuti distribusi eksponensial.
40
§ Laju kegagalan dari modul1 adalah
λ1 61 63
103 10= = ×− − jam jam -1
§ Laju kegagalan dari modul 2 adalah
λ2 61 65
105 10= = ×− − jam jam -1
a. Fungsi keandalan dari subsistem itu adalah
txtxtxtttP eeeeeetR
6662121 108105103 −−− −−−+−−− −+=−+= )()( λλλλ
Untuk misi pengoperasian selama 200 jam maka keandalan darisubsistem kontrol itu adalah
9999470200 200108200105200103 666
,)( =−+=−−− −−− xxxxxx
P eeeR q
b. MTTF dari sub sistem itu adalah
6662121 108
11051
1031111
−−−−+=
+−+=
xxxMTTF
λλλλ
MTTF = 408333,3333 jam q
7.4 Sistem Dengan Susunan Gabungan Seri - Paralel
Untuk menganalisa suatu sistem sederhana dengan susunanseri atau paralel sudah didiskusikan pada seksi terdahulu. Susunanseri atau paralel merupakan susunan dasar yang akan dipakai untukmenganalisa sistem yang mempunayai susunan yang lebih kompleks.
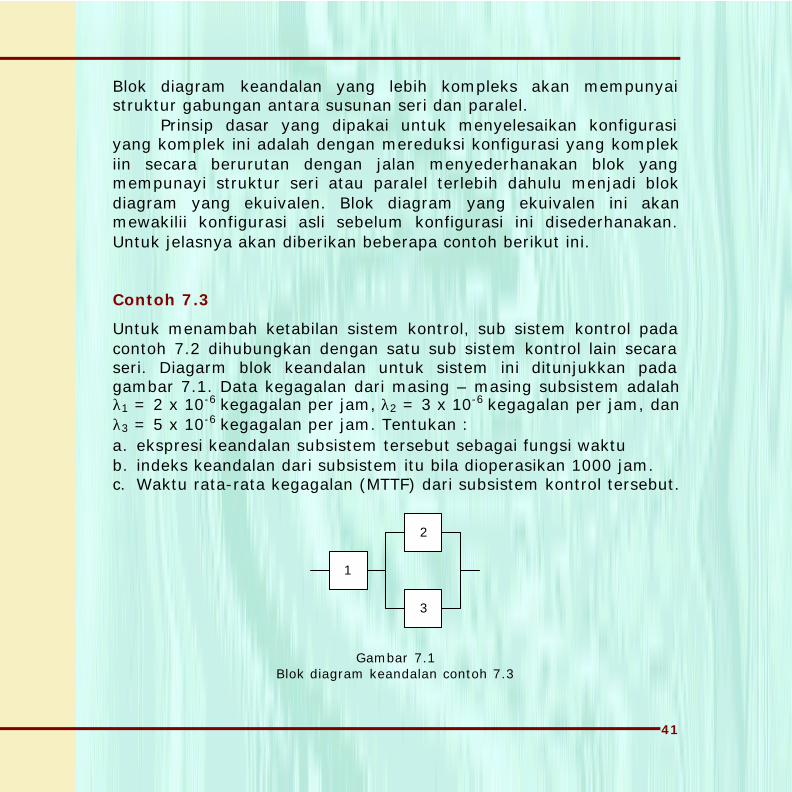
41
Blok diagram keandalan yang lebih kompleks akan mempunyaistruktur gabungan antara susunan seri dan paralel.
Prinsip dasar yang dipakai untuk menyelesaikan konfigurasiyang komplek ini adalah dengan mereduksi konfigurasi yang komplekiin secara berurutan dengan jalan menyederhanakan blok yangmempunayi struktur seri atau paralel terlebih dahulu menjadi blokdiagram yang ekuivalen. Blok diagram yang ekuivalen ini akanmewakilii konfigurasi asli sebelum konfigurasi ini disederhanakan.Untuk jelasnya akan diberikan beberapa contoh berikut ini.
Contoh 7.3
Untuk menambah ketabilan sistem kontrol, sub sistem kontrol padacontoh 7.2 dihubungkan dengan satu sub sistem kontrol lain secaraseri. Diagarm blok keandalan untuk sistem ini ditunjukkan padagambar 7.1. Data kegagalan dari masing – masing subsistem adalahλ1 = 2 x 10-6 kegagalan per jam, λ2 = 3 x 10-6 kegagalan per jam, danλ3 = 5 x 10-6 kegagalan per jam. Tentukan :a. ekspresi keandalan subsistem tersebut sebagai fungsi waktub. indeks keandalan dari subsistem itu bila dioperasikan 1000 jam.c. Waktu rata-rata kegagalan (MTTF) dari subsistem kontrol tersebut.
1
2
3
Gambar 7.1Blok diagram keandalan contoh 7.3
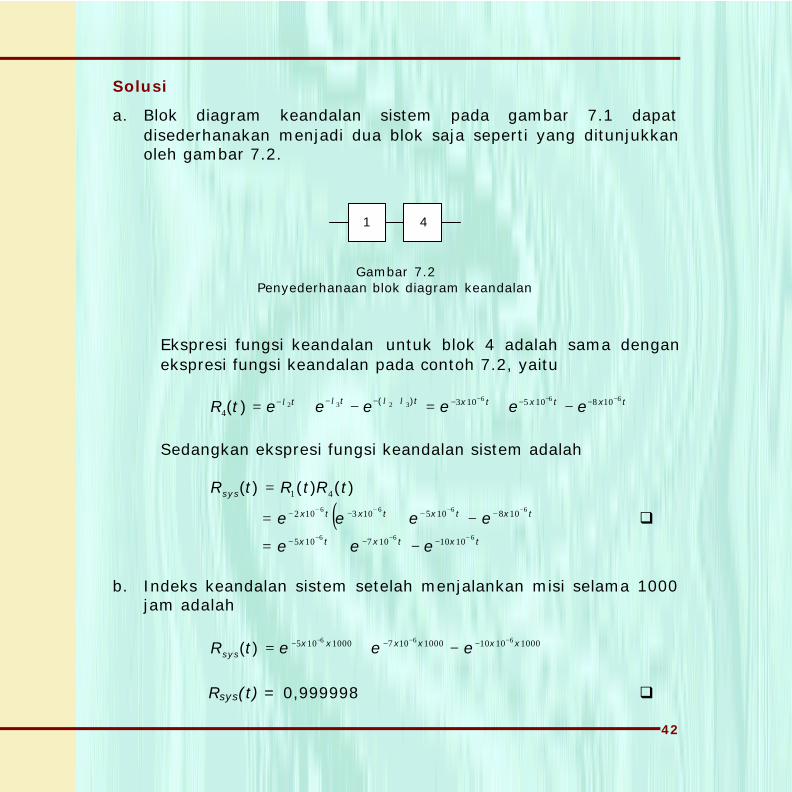
42
Solusi
a. Blok diagram keandalan sistem pada gambar 7.1 dapatdisederhanakan menjadi dua blok saja seperti yang ditunjukkanoleh gambar 7.2.
1 4
Gambar 7.2Penyederhanaan blok diagram keandalan
Ekspresi fungsi keandalan untuk blok 4 adalah sama denganekspresi fungsi keandalan pada contoh 7.2, yaitu
txtxtxttt eeeeeetR666
3232 1081051034
−−− −−−+−−− −+=−+= )()( λλλλ
Sedangkan ekspresi fungsi keandalan sistem adalah
( )txtxtx
txtxtxtx
sys
eee
eeee
tRtRtR
666
6666
1010107105
108105103102
41
−−−
−−−−
−−−
−−−−
−+=
−+=
=
)()()(
q
b. Indeks keandalan sistem setelah menjalankan misi selama 1000jam adalah
1000101010001071000105 666 xxxxxxsys eeetR
−−− −−− −+=)(
Rsys(t) = 0,999998 q
43
c. MTTF dari subsistem tersebut dapat dihitung sebagai berikut.
( )jam 9242857,142
)(
=−+=
−+=
=
−−−
∞−−−−
∞
∫
∫−−−−
666
0
108105103102
0
10101
1071
1051
6666
xxx
dteeee
dttRMTTF
txtxtxtx q
7.5 Sistem dengan Susunan Berlebihan Secara Parsial(Partially Redundant System)
Jika sistem dengan susunan seri dikategorikan sebagai sistemyang tidak berlebihan (non-redundant system) dan sistem dengansusunan paralel dikategorikan sebagai sistem dengan susunan yangsangat berlebihan (fully redundant system), maka ada sebuah sistemyang bisa dikategorikan sebagai sistem dengan susunan berlebihansecara parsial (partially redundant system).
Teknik yang dipakai untuk mengevaluasi sistem yang memilikisusunan seperti ini kurang lebih sama dengan apa yang telah dibahaspada bab 3. Aplikasi distribusi probabilitas untuk partially redundantsystem dapat diilustrasikan dengnan sistem yang memiliki nkomponen yang identik. Probabilitas masing-masing keadaan sistemini - dalam hal ini komponen yang yang sedang beroperasi adalahkomponen 0,1,2, … n - dapat ditentukan dari ekspansi binomial (R +Q)n. Pada bab terdaulu, nilai dari R dan Q ini diasumsikan konstan.Untuk kasus probabilitas yang tergantung dari waktu (time-dependent probability), nilai dari R dan Q adalah fungsi dari waktu
44
dan ekspresi binomial dimodifikasi menjadi [ ]ntQtR )()( + , dimana nilaidari R(t) dan Q(t) masing – masing dapat ditentukan dari fungsiprobabilitas yang menjadi model kegagalan suatu komponen /sistem.
Untuk pemodelan kegagalan komponen dengan menggunakandistribusi eksponensial, maka
tetR λ−=)( (7.18)
dan
tetQ λ−−= 1)( (7.19)
oleh karena itu ekspresi binomial menjadi ( ) ntt ee ][ λλ −− −+ 1 .
Contoh 7.4
Sebuah sistem memiliki empat buah unit identik yang masing –masing memiliki laju kegagalan (failure rate) 0,1 kegagalan / tahun.Evaluasi probabilitas dari sistem tersebut untuk tetap dapatberoperasi setelah 0,5 tahun dan 5 tahun jika minimal dua unit harusdapat beroperasi agar sistem sukses menjalankan misinya.
Solusi
Dengan menggunakan ekspresi binomial untuk n = 4
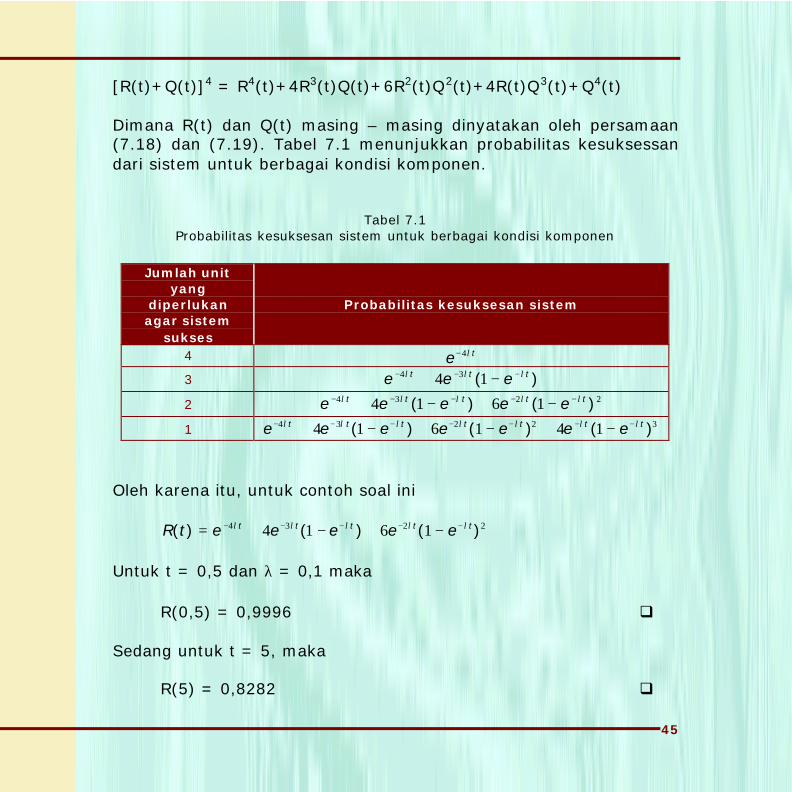
45
[R(t)+Q(t)]4 = R4(t)+4R3(t)Q(t)+6R2(t)Q2(t)+4R(t)Q3(t)+Q4(t)
Dimana R(t) dan Q(t) masing – masing dinyatakan oleh persamaan(7.18) dan (7.19). Tabel 7.1 menunjukkan probabilitas kesuksessandari sistem untuk berbagai kondisi komponen.
Tabel 7.1Probabilitas kesuksesan sistem untuk berbagai kondisi komponen
Jumlah unityang
diperlukanagar sistem
sukses
Probabilitas kesuksesan sistem
4 te λ4−
3 )( ttt eee λλλ −−− −+ 14 34
2 2234 1614 )()( ttttt eeeee λλλλλ −−−−− −+−+1 32234 141614 )()()( ttttttt eeeeeee λλλλλλλ −−−−−−− −+−+−+
Oleh karena itu, untuk contoh soal ini
2234 1614 )()()( ttttt eeeeetR λλλλλ −−−−− −+−+=
Untuk t = 0,5 dan λ = 0,1 maka
R(0,5) = 0,9996 q
Sedang untuk t = 5, maka
R(5) = 0,8282 q
46
Untuk kasus yang lebih umum dari unit yang non – identik,maka probabilitas dari masing – masing sistem dapat dievaluasidengan
[R1(t)+Q1(t)] [R2(t)+Q2(t)] … [Rn(t)+Qn(t)]
dimana nilai dari Ri(t)dan Qi(t) dapat dideksi dari distribusiprobabilitas dari komponen ke-i dan periode waktu yang menjadiinteres dalam analisa. Untuk kasus distribusi eksponensial maka
ti
ietR λ−=)( untuk i = 1,2, … , nt
iietQ λ−−= 1)( untuk i = 1,2, … , n
7.6 Sistem Standby (Standby System)
Seperti yang telah diulas pada beberapa contoh soal terdahulu,konfigurasi paralel dan partially redundant system mengakibatkankeandalan sistem meningkat secara keseluruhan. Semua atausebagian komponen yang memiliki konfogurasi ini mungkin akanberada pada mode pengoperasian. Hal ini tentunya tidak selalufeasible atau tidak praktis, sehingga konfigurasi standby mungkinakan dipakai. Pada konfigurasi standby, satu atau lebih komponenberada dalam keadaan standby dan siap akan mengambil alih ketikakomponen normal atau kompone utama mengalami kegagalan.
Secara umum ada dua buah kasus dasar yang berhubungandengan switching. Pertama, kita bisa menganggap switch yangdipakai adalah switch yang sempurna sehingga bisa dikategorikansebagai kasus pengalihan yang sempurna (perfect switching) sertayang kedua, kita bisa menganggap switch yang dipakai adalah switch
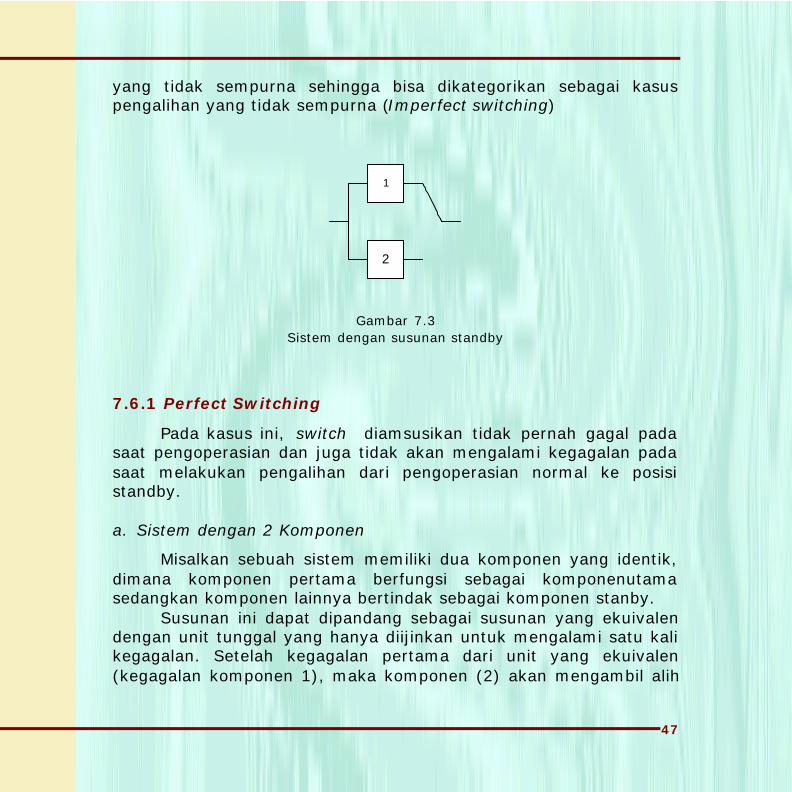
47
yang tidak sempurna sehingga bisa dikategorikan sebagai kasuspengalihan yang tidak sempurna (Imperfect switching)
1
2
Gambar 7.3Sistem dengan susunan standby
7.6.1 Perfect Switching
Pada kasus ini, switch diamsusikan tidak pernah gagal padasaat pengoperasian dan juga tidak akan mengalami kegagalan padasaat melakukan pengalihan dari pengoperasian normal ke posisistandby.
a. Sistem dengan 2 Komponen
Misalkan sebuah sistem memiliki dua komponen yang identik,dimana komponen pertama berfungsi sebagai komponenutamasedangkan komponen lainnya bertindak sebagai komponen stanby.
Susunan ini dapat dipandang sebagai susunan yang ekuivalendengan unit tunggal yang hanya diijinkan untuk mengalami satu kalikegagalan. Setelah kegagalan pertama dari unit yang ekuivalen(kegagalan komponen 1), maka komponen (2) akan mengambil alih
48
untuk kelangsungan operasi dan oleh karena itu sistem tidakmengalami kegagalan.
Jika ada kegagalan kedua dari unit yang equivalen (kegagalankomponen 2), sistem akan mengalami kegagalan. Logikapengoperasian pada sistem ini mengimplikasikan bahwa distribusipoison dapat digunakan untuk menghitung probabilitas dari sistemfailure karena distribusi ini memberikan probabilitas dari berbagaikomponen yang sedang beroperasi pada masa bergunanya. Untukkasus ini, perlu kiranya untuk mendapatkan probabilitas kegagalanyang tidak melebihi satu kegagalan. Dengan menggunakan distribusiPoisson
!)(
)(xet
tPtx
x
λλ −
= (7.20)
dimana Px(t) menyatakan probabilitas dari komponen x yang gagaldalam waktu t. Dengan menggunakan persamaan (7.20)
tetP λ−== )( gagal] yang komponen adaP[Tidak 0
ttetPP λλ −== )(]gagal komponen Satu[ 1
Oleh karena itu keandalan sistem adalah
)()()()( tetPtPtR t λλ +=+= − 110 (7.21)
b. Sistem dengan 2 komponen standby
Dengan menggunakan logika di atas, untuk satu komponenutama dan dua komponen stanby maka, jumlah kegagalan yangdapat ditoleransi dalam unit yang equivalen adalah dua sebelum
49
sistem mengalami gagal. Sehingga keandalan sistem dapatditentukan dengan
++=++= −
!)(
)()()()(2
12
210
ttetPtPtPtR t λ
λλ (7.22)
c. Sistem dengan n komponen standby
Secara umum prinsip yang digunakan untuk mendapatkanpersamaan (7.21) dan (7.22) dapat diperluas untuk sembarangjumlah komponen standby, karena jumlah kegagalan yang dapatditoleransi sama dengan jumlah komponen standby.
Oleh karena itu, secara umum keandalan sistem dengan nkomponen standby yang identik adalah
∑=
−− =
+++++=
n
x
txnt
xet
nttt
tetR0
32
321
!)(
!)(
...!)(
!)(
)(λ
λ λλλλλ (7.23)
d. Mean time to failure (MTTF)
Harga dari MTTF untuk sistem dengan satu komponen standbydapat dihitung sebagai berikut
λλλλλ 211
10
=+=+= ∫∞ − dtteMTTF t )( (7.24)
Dan untuk sistem dengan n komponen standby, MTTF nya dapatdihitung sebagai berikut
λλ λ 1
00
+== ∫ ∑∞
=
− nxet
MTTFn
x
tx
!)(
(7.25)
50
7.6.2. Imperfect Switching
Untuk kasus ini, kemungkinan switch mengalami kegagalandalam mengalihkan tugas dari komponen aktif ke komponen standbyakan dimasukkan dalam perhitungan, dengan demikian perludidefinisikan probabilitas sukses pengoperasian switch. Probabilitassukses ini dinotasikan dengan Ps dan dapat ditentukan nilainyadengan mengumpulkan data kesuksesan dan kegagalan operasionalswitch dengan menggunakan persamaan berikut ini.
switch loperasiona jumlahswitch loperasiona kesuksesan jumlah=sP (7.26)
Kembali pada kasus 2 komponen yang memiliki susunanstandby, dimana proses pengalihan dan perlatan pengalih memilikinilai keandalan yang kurang dari 100%, maka agar sistem suksesdalam menjalankan misinya maka salah satu kondisi berikut ini harusdipenuhi, yaitu jika tidak ada satupun komponen yang gagal atausatu komponen (utama) mengalami kegagalan dan peralatanpengalih (switch) sukses beroperasi. Dengan demikian keandalansistem dapat diturunkan sebagai berikut.
P [tidak ada komponen yang gagal] = P0(t) = e- tλ
P [satu komponen gagal dan proses pengalihan dan switch beroperasi] = P1(t).Ps
= Psλ te- tλ
Yang akan memberikan persamaan keandalan sistem
)()( tPetR st λλ += − 1 (7.27)
51
Konsep ini dapat diperluas untuk kasus dengan dua atau lebihkomponen standby, dengan memasukkan term Ps pada persamaan(7.22) dan (7.23).
MTTF dari sistem standby dapat diperoleh denganmengintegralkan persamaan keandalan sistem dengan batas integrasimulai dari o sampai ∞, yaitu
λλλ s
st P
tPeMTTF+
=+= ∫∞ − 1
10
)( (7.28)

52
7.7 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
3. Ramakumar, R [1993]., Engineering Reliability : Fundamentalsand Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 3
53
Component ImportanceAnalysis
8.1 Pendahuluan
Secara umum reliability importance dari sebuah komponendalam sebuah sistem tergantung dari dua faktor yaitu :§ letak komponen di dalam sebuah sistem§ reliability dari komponen yang sedang di analisa
Analisa importance (importance analysis) dapat dikatakan samadengan sensitivity analysis dan oleh karena itu sangat bermanfaatuntuk mendesain sistem, mendiagnosis sistem, sertamengoptimalkan sistem. Dengan menggunakan ukuran importancediharapakan dapat memberikan prioritas untuk melakukanpengecekan terhadap komponen-komponen yang dapatmenyebabkan kegagalan sistem. Secara umum, semakin besar nilaidari component importance semakin penting komponen tersebutuntuk mendapat perhatian.
Ada beberapa cara untuk melakukan analisa/mengukurreliability importance dari sebuah komponen yang sudahdidefinisikan. Berikut ini teknik analisa reliability importance yang
54
sudah dipublikasikan oleh Heley dan Kumamoto (1992) serta olehH∅yland dan Rausand (1994). Teknik itu adalah :
• Birnbaum’s measure• Criticality Importance• Vesely – Fussell’s measure• Improvement Potential
8.2 Birnbaum’s Measure
Birnbaum (1969) mengusulkan ukuran reliability importancedari sebuah komponen yang ada di dalam sistem sebagai berikut.
)()(
)(tR
tRtiI
i
SB
∂∂= (8.1)
dengan)( tiI B = ukuran reliability importance birnbaum
RS(t) = nilai reliability dari sistem pada saat tRi(t) = nilai reliability dari komponen i yang ada di dalam
sistem pada saat t, i = 1,2, … , n
Jika nilai )( tiI B besar, perubahan reliability dari komponen i
yang kecil akan menghasilkan perubahan komparatif yang besar padareliability sistem pada saat t.
Selain ukuran tersebut di atas, Birnbaum juga mengusulkanapa yang disebut dengan Birnbaum structural importance. Untukmengetahui indeks ini, berikut ini fungsi struktur (structural function)dari sebuah sistem yang merupakan fungsi biner dari sebuah sistemdan diekspresikan oleh persamaan berikut ini.
55
),...,,( )( 21 nxxxx φφ = (8.2)
dengan
=gagal keadaan dalam sistem jika ,
berfungsi sistem jika , )(
0
1xφ
xi = variabel biner dari komponen i
=gagal keadaan dalam komponen jika ,
berfungsi komponen jika , 0
1ix
x = state vectorx = (x1, x2, … , xn)
Sedangkan birnbaum structural importance didefinisikan oleh
2
)(1−
=n
i(i)B φ
φ
η(8.3)
dengan)(iφη = jumlah total dari critical path set dari komponen i
[ ]∑ −= ),0(),1()( xxi ii φφηφ
n = jumlah komponen yang ada di dalam sistem
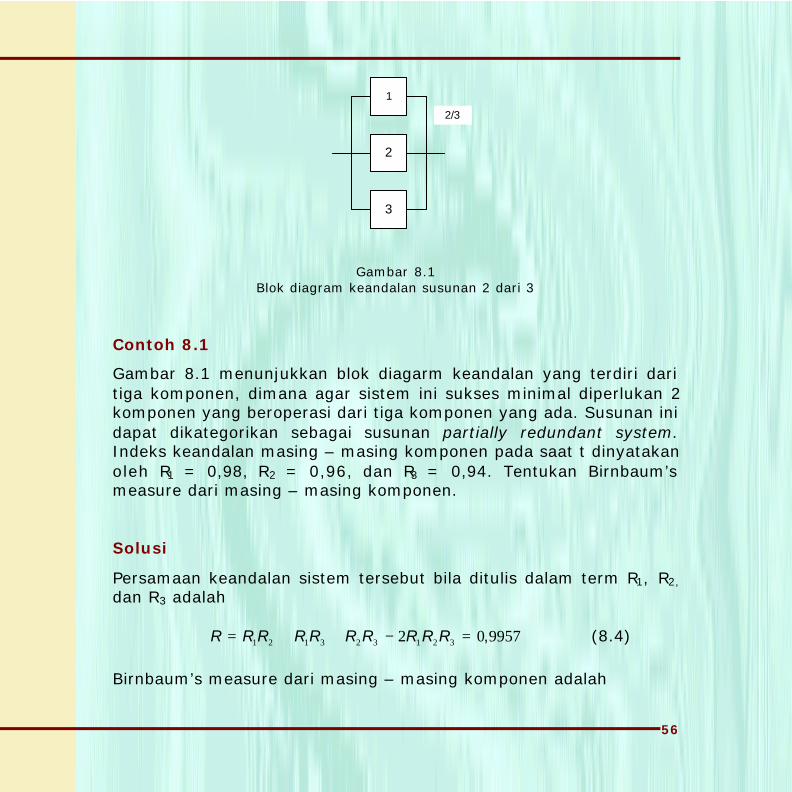
56
1
2
3
2/3
Gambar 8.1Blok diagram keandalan susunan 2 dari 3
Contoh 8.1
Gambar 8.1 menunjukkan blok diagarm keandalan yang terdiri daritiga komponen, dimana agar sistem ini sukses minimal diperlukan 2komponen yang beroperasi dari tiga komponen yang ada. Susunan inidapat dikategorikan sebagai susunan partially redundant system.Indeks keandalan masing – masing komponen pada saat t dinyatakanoleh R1 = 0,98, R2 = 0,96, dan R3 = 0,94. Tentukan Birnbaum’smeasure dari masing – masing komponen.
Solusi
Persamaan keandalan sistem tersebut bila ditulis dalam term R1, R2,
dan R3 adalah
995702 321323121 ,=−++= RRRRRRRRRR (8.4)
Birnbaum’s measure dari masing – masing komponen adalah
57
0952021 32321
,)( =−+=∂∂= RRRRRR
tI B q
0776022 31312
,)( =−+=∂∂= RRRRRR
tI B q
0584023 21213
,)( =−+=∂∂= RRRRRR
tI B q
Sehingga
)()()( tItItI BBB 321 >>
8.3 Criticality Importance
Criticality importance didefinisikan sebagai probabilitas darikomponen i yang menyebabkan kegagalan sistem dimana sistemtelah mengalami kegagalan pada saat t. Secara matematis criticalityimportance didefinisikan oleh
)(1
))(1)(()(
tR
tRtiItiI
S
iB
CR
−−
= (8.5)
atau dapat juga ditulis sebagai
)(
)()()(
tQ
tQtiItiI
S
iB
CR = (8.6)
dengan,Qi(t) = nilai ketakandalan dari komponen i pada saat t.
58
QS(t) = nilai ketakandalan dari sistem pada saat t.
Contoh 8.2
Dengan merujuk pada contoh soal 8.1, tentukan criticallityimportance dari masing – masing komponen.
Solusi
Dengan memanfaatkan hasil dari contoh soal 8.1 dan persamaan(8.6) maka criticallity importance dari masing – masing komponenadalah
4428021
111
321323121
1 ,))((
)( =+−−−
−=
RRRRRRRRR
RtItI
BCR q
7219021
122
321323121
2 ,))((
)( =+−−−
−=
RRRRRRRRR
RtItI
BCR q
8149021
133
321323121
3 ,))((
)( =+−−−
−=
RRRRRRRRR
RtItI
BCR q
Sehingga
)()()( tItItI CRCRCR 321 <<
59
8.4 Vesely – Fussell’s Measure
Vesely – Fussell’s measure menyatakan probabilitas bahwaminimal satu cut set yang mengandung komponen i mengalamikegagalan pada saat t dimana sistem juga telah mengalamikegagalan pada saat t. Secara matematis Vesely – Fussell’sdidefiniskan oleh persamaan berikut ini.
))(())()((
))()(()(tCP
tCtDPtCtDPtiI i
iVF ∩== (8.7)
dimanaDi(t) = minimal cut set yang mengandung komponen i yang
megalami kegagalan pada saat t.C(t) = kegagalan sistem pada saat t.
Persamaan (8.7) dapat disederhanakan menjadi
))(())((
)(tCP
tDPtiI iVF = (8.8)
Hal ini dapat terjadi karena jika Di(t) terjadi maka C(t) pasti terjadi,atau secara matematis Di(t) merupakan himpunan bagian dari C(t).
Persamaan (8.8) dapat juga ditulis menjadi
)(1
))((1(1
)( 1
tR
tEP
tiIS
mi
j
ij
VF
−
−−=
∏= (8.9)
dengan,
60
)(tE ij = minimal cut set j diantara beberapa minimal cut set
yang mengandung komponen i yang mengalamikegagalan pada saat t untuk i = 1,2, … , n dan j = 1,2, …, mi.
mi = jumlah minimal cut set yang mengandung kompnen i.
Dengan melakukan aproksimasi pada bagian pembilangpersamaan (8.9), persamaan (8.9) dapat ditulis kembali menjadipersamaan di bawah ini
)(
)(
)(
))(()(
tQ
tijQ
tR
tEPtiI
S
mi
j
S
mi
j
ij
VF
∑∑== =
−= 11
1
(
(8.10)
Untuk sistem yang kompleks, persamaan (8.10) sangat disarankanuntuk diaplikasikan.
Contoh 8.3
Dengan merujuk pada contoh soal 8.1, tentukan Vesely –Fussell’smeasure dari masing – masing komponen.
Solusi
Cut set dari blok diagram keandalan sistem adalah {1,2}, {1,3}, dan{2,3}, sehingga
002003213121
12
11
12
11
12
111
,)()()()()()()(
))()(())(())(())()(())((
≈−+=∩−+=∪=
tQtQtQtQtQtQtQ
tEtEPtEPtEPtEtEPtDP
61
003203213221
22
21
22
21
22
212
,)()()()()()()(
))()(())(())(())()(())((
≈−+=∩−+=∪=
tQtQtQtQtQtQtQ
tEtEPtEPtEPtEtEPtDP
003603213231
32
31
32
31
32
313
,)()()()()()()(
))()(())(())(())()(())((
≈−+=∩−+=∪=
tQtQtQtQtQtQtQ
tEtEPtEPtEPtEtEPtDP
Dari contoh 8.1, kita mempunyai 004309957011 ,,))(( =−=−= RtCP .Sehingga Vesely – Fussell’s measure dari masing – masing komponenadalah
465100043000200
1 1 ,,,
))(())((
)( ≈==tCPtDP
tIVF q
744200043000320
2 1 ,,,
))(())((
)( ≈==tCPtDP
tIVF q
837200043000360
3 1 ,,,
))(())((
)( ≈==tCPtDP
tIVF q
Vesely – Fussell’s measure dapat pula didihitung denganmenggunakan rumus pendekatan (8.10), yaitu
465101 312112
11 ,)( ≈
+=
+≈
SS
VF
QQQQQ
QQQ
tI((
q
744202 322122
21 ,)( ≈
+=
+≈
SS
VF
QQQQQ
QQQ
tI((
q
62
837203 323132
31 ,)( ≈
+=
+≈
SS
VF
QQQQQ
QQQ
tI((
q
sehingga
)()()( tItItI VFVFVF 321 <<
8.5 Improvement Potential
Pada kasus-kasus tertentu, mungkin menjadi hal yang perludiketahui seberapa besar reliability dari sistem bertambah jikakomponen i (i = 1, 2, … , n) diganti dengan sebuah komponen yangsempurna. Jika h(RS(t)) menyatakan reliability dari sistem pada saatt, maka perbedaan antara h(1i, RS(t)) dan h(RS(t)) disebut denganimprovement potential. Secara matematis improvement potentialditulis sebagai
))(())(,1()( tRhtRhtiI SSiIP −= (8.11)
Persamaan (8.11) dapat ditulis sebagai fungsi dari birnbaum measure)( tiI B sebagai
))(1)(()( tRtiItiI iBIP −= (8.12)
Persamaan (8.12) dapat juga ditulis sebagai fungsi dari criticalityimportance )( tiI CR sebagai
)()()( tQtiItiI SCRIP = (8.13)
63
Contoh 8.4
Dengan merujuk pada contoh soal 8.1, tentukan improvementpotential dari masing – masing komponen.
Solusi
Dengan menggunakan persamaan (8.12)
00190111 1 ,))(()( =−= RtItI BIP q
00310122 2 ,))(()( =−= RtItI BIP q
00350133 3 ,))(()( =−= RtItI BIP q
Sehingga)()()( tItItI I PIPIP 321 <<
Tabel 8.1 menunjukkan perbandingan hasil dari berbagaimetode untuk menyelesaikan masalah partially redundant system.Tabel tersebut menunjukkan rangking yang berbeda untuk tiap – tiapkomponen. Ini merupakan hal yang wajar karena masing metodememiliki definisi yanag berlainan, sehingga apabila kita menganalisasistem harus disesuaikan dengan keperluannya.
Untuk mengidentifikasi komponen yang harus diperbaiki untukmeningkatkan keandalan sistem, birnbaum’s measure danimprovement potential merupakan metode yang tepat untuk dipakai.Sedangkan untuk mengidentifikasi komponen mana yang memilikiprobabilitas yang dapat menyebabkan kegagalan sistem, makacritical importance measure dan Vesely – Fussel’s measuremerupakan metode yang paling tepat untuk dipakai.
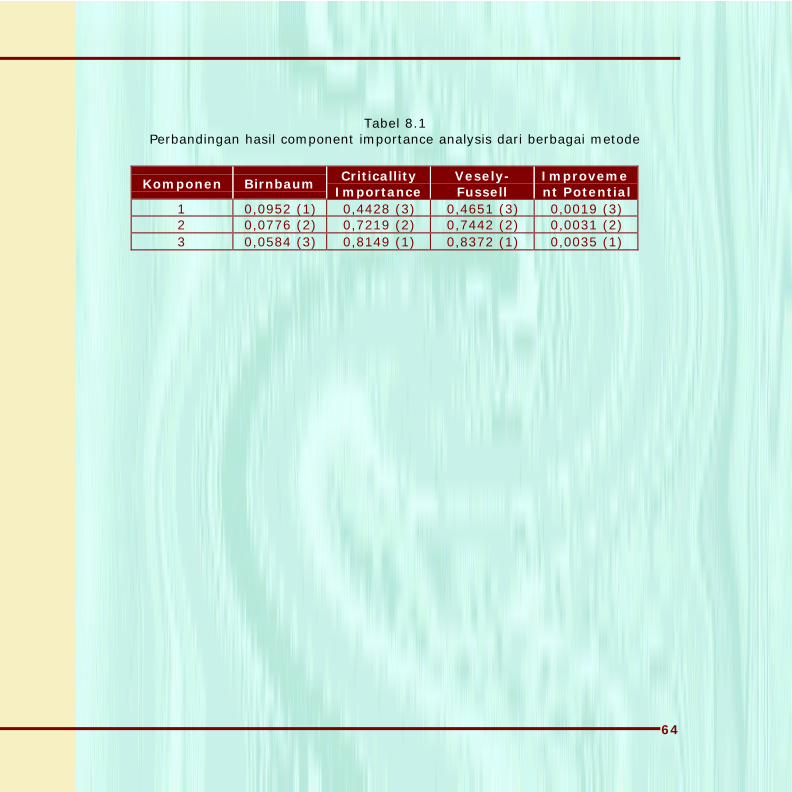
64
Tabel 8.1Perbandingan hasil component importance analysis dari berbagai metode
Komponen BirnbaumCriticallity
ImportanceVesely-Fussell
Improvement Potential
1 0,0952 (1) 0,4428 (3) 0,4651 (3) 0,0019 (3)2 0,0776 (2) 0,7219 (2) 0,7442 (2) 0,0031 (2)3 0,0584 (3) 0,8149 (1) 0,8372 (1) 0,0035 (1)
65
8.6 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
3. Ramakumar, R [1993]., Engineering Reliability : Fundamentalsand Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 3
KEANDALAN DAN PERAWATAN
Metode PengkajianKeandalanBagian 3
OlehIr. Dwi Priyanta, MSE
JURUSAN TEKNIK SISTEM PERKAPALANFAKULTAS TEKNOLOGI KELAUTANINSTITUT TEKNOLOGI SEPULUH NOPEMEBERSURABAYA
© Copyright ada pada penulis
MODUL4
FOR INTERNAL USE ONLY
DAFTAR ISI MODUL 4
BAB 9 Rantai Markov Diskrit (Discrete Markov Chain)9.1 Pendahuluan9.2 Konsep Pemodelan9.3 Stochastic Transitional Probability (STP) Matrix9.4 Evaluasi Probabilitas yang Tergantung Waktu (time Dependent
Probability Evaluation)9.5 Evaluasi Probabilitas Untuk Kondisi Mantap9.6 Absorbing State9.7 Referensi dan Bibliografi
BAB 10Proses Markov Kontinyu (Continuous Markov Process)10.1 Pendahuluan10.2 Konsep Umum Pemodelan10.3 Pengevaluasian yang Tergantung Waktu10.4 StochasticTransitional Probability (STP) Matrix10.5 Pengevaluasian Probabilitas untuk Kondisi Batas10.5.1 Komponen Tunggal yang Mampu-Rawat10.5.2 Dua Komponen yang Mampu-rawat10.6 Pengevaluasian dengan Menggunakan Persamaan Diferensial10.7 Mean Time to Failure (MTTF)10.8 Referensi dan Bibliografi
FOR INTERNAL USE ONLY
BAB 11Simulasi Monte Carlo11.1 Konsep Simulasi11.2 Random Number Generator11.3 Konversi Uniform random Number11.4 Algoritma Simulasi11.4.1 Algoritma Konfigurasi Seri Untuk Sistem Non-Repairable11.4.2 Algoritma Konfigurasi Paralel Untuk Sistem Non-Repairable11.4.3 Algoritma Konfigurasi Paralel Repairable System11.4.4 Algoritma Konfigurasi Standby System11.5 Referensi dan Bibliografi
KEMBALI KE MENU UTAMA
1
Rantai Markov Diskrit(Discrete Markov Chain)
9.1 Pendahuluan
Berbagai teknik analitis untuk mengevaluasi reliability darisuatu sistem telah diuraikan pada bab terdahulu. Teknik analitis inimengasumsikan bahwa sistem adalah tidak repairable, kalaupunsistem itu repairable maka selalu diasumsikan bahwa waktu untukmereparasi sistem / komponen yang ada di dalam sistem adalahsangat singkat bila dibandingkan dengan waktu pengoperasiansistem. Teknik pemodelan dengan menggunakan pendekatan Markov(Markov Approach) menawarkan suatu pemodelan untukmemperhitungkan waktu reparasi atau repairable system.
Pendekatan Markov dapat diaplikasikan pada perilaku(behavior) random dari suatu sistem yang bervariasi secara diskritmaupun kontinyu terhadap ruang dan waktu. Variasi random baiksecara diskrit maupun secara random ini disebut dengan prosesstokastik (stochastic process). Tidak semua proses stokastik dapatdimodelkan dengan memakai pendekatan Markov dasar (basic
2
Markov approach). Syarat yang harus dipenuhi agar suatu sistemdapat dimodelkan dengan menggunakan pedekatan Markov dasaradalah
a. sistem harus memiliki sifat lack of memoryb. proses dari sistem harus stasioner atau homogen
Sifat pertama, lack of memory, berarti bahwa keadaan sistempada masa yang akan datang tidak tergantung dari keadaan masalalu kecuali keadaan yang langsung mendahuluinya. Dengan kata lainkeadaan dari suatu sistem pada masa yang akan datang hanyatergantung dari keadaan saat ini, dan bukan tergantung dari keadaanmasa lalu dan tidak juga tergantung dari bagaimana suatu sistemdapat mencapai suatu keadaan pada saat ini. Sifat kedua, sistemyang stasioner atau homogen, berarti bahwa perilaku sistem adalahsama pada semua titik-titik waktu yang akan dipertimbangkan,artinya probabilitas untuk berpindah dari satu keadaan ke keadaanlain adalah sama (stasioner) pada sembarang waktu baik waktulampau dan waktu yang akan datang. Jika probabilitas ini merupakanfungsi dari waktu atau merupakan berupa angka diskrit yangberjenjang, maka proses ini dikategorikan sebagai non stasioner ataujuga bisa disebut dengan non-Markovian.
Kedua sifat yang harus dimiliki oleh suatu sistem agar sistemini bisa dimodelkan dengan menggunakan pendekatan Markov adalahbila sistem atau komponen yang ada di dalam sistem memilikiprobability distribution dengan laju kegagalan (failure rate) yangkonstan. Probability distribution function yang memiliki lajukegagalan yang konstan misalnya adalah distribusi eksponensial ataudistribusi Poisson.
Secara umum pemodelan dengan menggunakan pendekatanMarkov dapat diapakai untuk memodelkan ruang dan waktu (spaceand time) sistem baik yang diskrit maupun yang kontinyu. Umumnya,space dari sistem adalah diskrit, karena space ini hanya
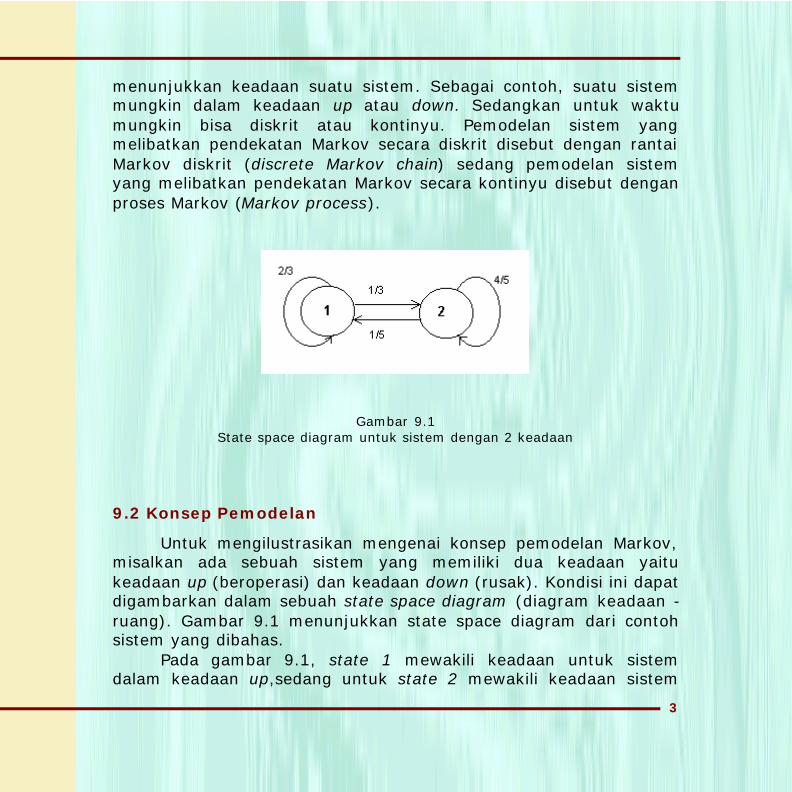
3
menunjukkan keadaan suatu sistem. Sebagai contoh, suatu sistemmungkin dalam keadaan up atau down. Sedangkan untuk waktumungkin bisa diskrit atau kontinyu. Pemodelan sistem yangmelibatkan pendekatan Markov secara diskrit disebut dengan rantaiMarkov diskrit (discrete Markov chain) sedang pemodelan sistemyang melibatkan pendekatan Markov secara kontinyu disebut denganproses Markov (Markov process).
Gambar 9.1State space diagram untuk sistem dengan 2 keadaan
9.2 Konsep Pemodelan
Untuk mengilustrasikan mengenai konsep pemodelan Markov,misalkan ada sebuah sistem yang memiliki dua keadaan yaitukeadaan up (beroperasi) dan keadaan down (rusak). Kondisi ini dapatdigambarkan dalam sebuah state space diagram (diagram keadaan -ruang). Gambar 9.1 menunjukkan state space diagram dari contohsistem yang dibahas.
Pada gambar 9.1, state 1 mewakili keadaan untuk sistemdalam keadaan up,sedang untuk state 2 mewakili keadaan sistem
4
dalam keadaan down. Probabilitas dari sistem itu untuk tetap padastate 1 adalah 2/3 atau sistem itu dapat berpindah dari state 1 kestate 2 dengan probabilitas 1/3. Yang perlu diperhatikan dalampemodelan ini adalah bahwa jumlah dari proabilitas ini adalah 1. Darigambar 1 juga terlihat bahwa probabilitas sistem itu untuk tetapberada pada state 2 adalah 4/5 sedang probabilitas sistem ituberpindah dari state 2 ke state 1 adalah 1/5.
Contoh di atas merupakan contoh dari rantai Markov diskrit,karena sistemnya adalah stasioner dan perpindahan antara satu stateke state yang lain terjadi dalam jenjang diskrit.
Sistem di atas diasumsikan berawal pada state 1 dan perilakutransien (transient behavior) dievaluasi sesuai dengan pertambahanwaktu. Keadaan sistem pada saat t = 0 disebut dengan kondisi awal(initial condition). Untuk berbagai kasus pengevaluasian reliabilitydari sistem kondisi awal ini biasanya sudah diketahui. Perilakutransien dari sistem ini sangat tergantung dari kondisi awal sistem,sedangkan nilai probabilitas dari kondisi mantap (limiting state /steady state) tidak tergantung dari kondisi awal. Sebuah sistem atausuatu sistem dimana nilai probabilitasnya tidak tergantung padakondisi awal dikenal dengan sistem ergodik (ergodic system). Agarsuatu sistem bisa disebut sebagai sistem yang ergodik, maka semuastate dari suatu sistem dapat dicapai dari berbagai state yang lainbaik secara langsung maupun tidak langsung melalui state antara(intermediate state). Jika kondisi ini tidak mungkin terjadi dan adasatu atau beberapa state yang bila sekali sistem berada pada state inisistem tidak bisa bertransisi ke state yang lain, maka state ini disebutdengan absorbing state. State 3 pada gambar 9.2 merupakan suatucontoh absorbing state.
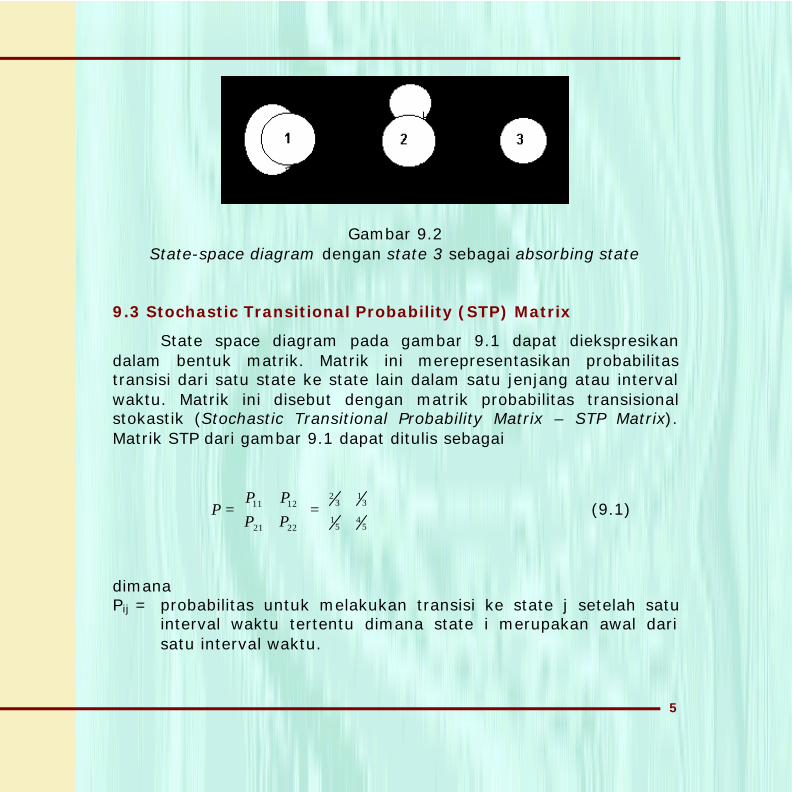
5
Gambar 9.2State-space diagram dengan state 3 sebagai absorbing state
9.3 Stochastic Transitional Probability (STP) Matrix
State space diagram pada gambar 9.1 dapat diekspresikandalam bentuk matrik. Matrik ini merepresentasikan probabilitastransisi dari satu state ke state lain dalam satu jenjang atau intervalwaktu. Matrik ini disebut dengan matrik probabilitas transisionalstokastik (Stochastic Transitional Probability Matrix – STP Matrix).Matrik STP dari gambar 9.1 dapat ditulis sebagai
=
=
54
51
31
32
2221
1211
PP
PPP (9.1)
dimanaPij = probabilitas untuk melakukan transisi ke state j setelah satu
interval waktu tertentu dimana state i merupakan awal darisatu interval waktu.
6
Sedang matrik STP untuk state space diagram pada gambar 9.2adalah
=
=
100
0
51
53
51
31
32
333231
232221
131211
PPP
PPP
PPP
P (9.2)
Secara umum bila suatu sistem yang dimodelkan denganmenggunakan pemodelan Markov secara diskrit memiliki n buahstate, maka secara umum matrik STP nya dapat dituliskan sebagaiberikut.
=
nnnn
n
n
PPP
PPP
PPP
P
......
.........
.........
......
......
21
22221
11211
(9.3)
denganPij = probabilitas untuk melakukan transisi ke state j setelah satu
interval waktu tertentu dimana state i merupakan awal darisatu interval waktu.
Yang perlu diperhatikan dari matrik STP ini adalah jumlah probabilitasuntuk masing-masing baris harus sama dengan satu.
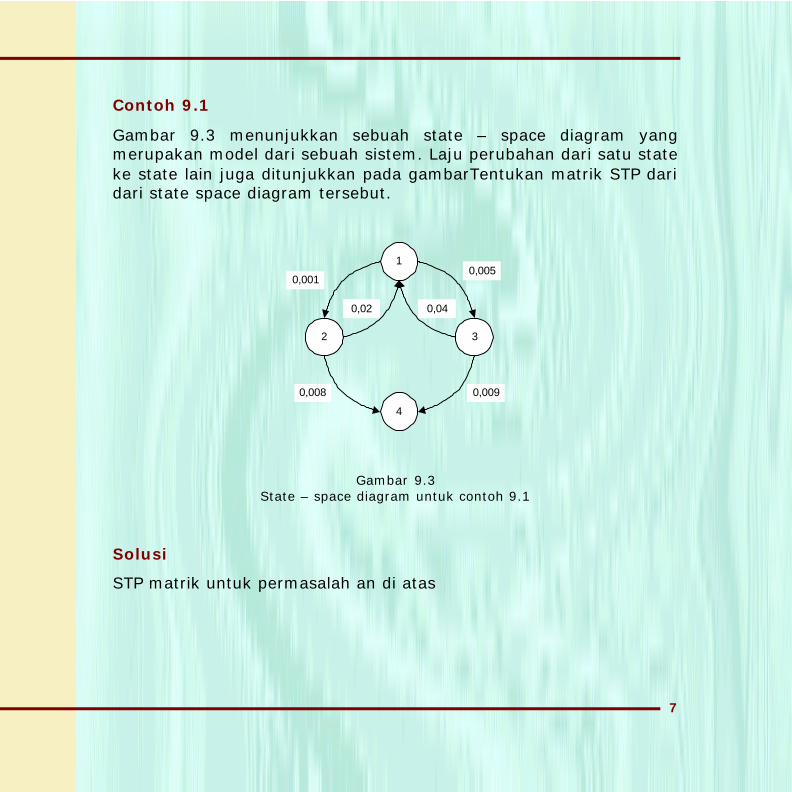
7
Contoh 9.1
Gambar 9.3 menunjukkan sebuah state – space diagram yangmerupakan model dari sebuah sistem. Laju perubahan dari satu stateke state lain juga ditunjukkan pada gambarTentukan matrik STP daridari state space diagram tersebut.
1
32
4
0,0010,005
0,0090,008
0,040,02
Gambar 9.3State – space diagram untuk contoh 9.1
Solusi
STP matrik untuk permasalah an di atas
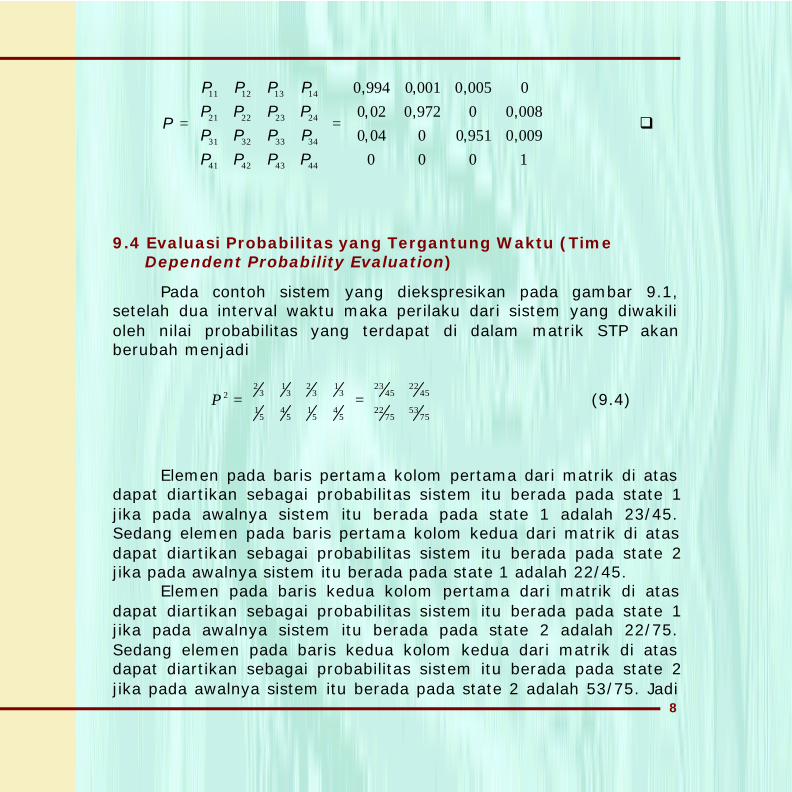
8
=
=
1000
009095100040
008009720020
0005000109940
44434241
34333231
24232221
14131211
,,,,,,
,,,
PPPPPPPPPPPPPPPP
P q
9.4 Evaluasi Probabilitas yang Tergantung Waktu (Time Dependent Probability Evaluation)
Pada contoh sistem yang diekspresikan pada gambar 9.1,setelah dua interval waktu maka perilaku dari sistem yang diwakilioleh nilai probabilitas yang terdapat di dalam matrik STP akanberubah menjadi
=
=
7553
7522
4522
4523
54
51
31
32
54
51
31
32
2P (9.4)
Elemen pada baris pertama kolom pertama dari matrik di atasdapat diartikan sebagai probabilitas sistem itu berada pada state 1jika pada awalnya sistem itu berada pada state 1 adalah 23/45.Sedang elemen pada baris pertama kolom kedua dari matrik di atasdapat diartikan sebagai probabilitas sistem itu berada pada state 2jika pada awalnya sistem itu berada pada state 1 adalah 22/45.
Elemen pada baris kedua kolom pertama dari matrik di atasdapat diartikan sebagai probabilitas sistem itu berada pada state 1jika pada awalnya sistem itu berada pada state 2 adalah 22/75.Sedang elemen pada baris kedua kolom kedua dari matrik di atasdapat diartikan sebagai probabilitas sistem itu berada pada state 2jika pada awalnya sistem itu berada pada state 2 adalah 53/75. Jadi
9
matrik P2 menyatakan semua proabailitas dari sistem setelah duainterval waktu, baik sistem itu berawal dari state 1 maupun berawaldari state 2. Secara umum elemen-elemn yang terdapat di dalammatrik Pn menyatakan probabilitas dari suatu sistem yang berawaldari keadaan i dan berakhir pada state j setelah n interval waktu.
Jika keadaan awal dari sistem diwakili oleh suatu matrikprobabilitas P(0) yang menyatakan probabilitas dari masing-masingstate pada saat awal dari misi sistem, maka setelah n intervalprobabilitas dari sistem itu dapat dituliskan ke dalam sebuahpersamaan
nPPnP )()( 0= (9.5)
denganP(n) = matrik proababilitas yang menyatakan probabilitas dari
masing-masing state setelah n interval waktuP(0) =matrik probabilitas yang menyatakan probabilitas dari
masing-masing state pada saat awal dari misi sistem P =matrik STP yang mewakili sistem
Bila sistem yang digambarkan pada gambar 9.1 mengawali misinyapada state 1, maka kondisi awal dapat dituliskan dalam matrikprobabilitas
[ ]010 =)(P (9.6)
Elemen 1 pada matrik probabilitas pada persamaan (9.6)menyatakan bahwa probabilitas dari sistem itu untuk berada pada
10
state 1 adalah 1, sedang elemen 0 pada matrik probabilitas padapersamaan (9.6) menyatakan bahwa probabilitas dari sistem ituuntuk berada pada state 2 adalah 0.
Contoh 9.2
Dengan menggunakan state – space diagram pada gambar 9.1,tentukan probabilitas masing-masing state setelah dua intervalwaktu, jika misi dari sistem tersebut diawali dari state 1.
Solusi
Setelah dua interval waktu maka perilaku dari sistem yang diwakilioleh nilai probabilitas yang terdapat di dalam matrik STP akanberubah menjadi
=
=
7553
7522
4522
4523
54
51
31
32
54
51
31
32
2P
Setelah dua interval waktu, probabilitas masing-masing state dapatdihitung dengan menggunakan persamaan (9.5).
[ ] [ ]4522
4523
7553
7522
4522
4523
2 0102 =
== )()( PPP (9.7)
yang berarti bahwa setelah dua interval waktu, probabilitas darisistem itu untuk tetap berada pada state 1 adalah 23/45 sedang
11
probabilitas dari sistem itu untuk berada pada state 2 adalah 22/45.q
9.5 Evaluasi Probabilitas Untuk Kondisi Mantap
Seksi 9.4 telah membahas bagaimana cara menghitungprobabilitas dari suatu sistem yang telah dimodelkan denganmenggunakan rantai Markov diskrit untuk kondisi transien. Caratersebut dapat juga dipakai untuk menghitung probabilitas darisistem ergodik. Satu kelemahan dari cara ini adalah, perkalian matrikharus dialakukan secara berulang-ulang dan membutuhkan waktuyang sangat lama.
Berikut ini akan diuraikan suatu teknik perhitungan untukmendapatkan nilai probabilitas dari suatu sistem ergodik untukkondisi mantap. Prinsip dari perhitungan ini adalah sekali suatusistem memasuki kondisi mantap, perkalian matrik STP lebih lanjuttidak akan merubah nilai probabilitas dari keadaan sistem yang sudahmantap. Secara matematis prinsip ini dapat ditulis dalam bentukperkalian matrik. Jika A menyatakan vektor probabilitas untukkeadaan mantap sistem dan P adalah matrik STP, maka untuk kondisimantap dari sistem aka berlaku
AAP = (9.8)
Sistem yang dimodelkan pada gambar 9.1 kembali akan dipakaisebagai contoh. Misalkan A = [ P1 P2 ], dengan P1 mewakiliprobabilitas keadaan mantap dari sistem itu untuk berada pada state1 dan P2 mewakili probabilitas keadaan mantap dari sistem itu untuk
12
berada pada state 2. Dengan memakai persamaan (9.8), probabilitasmasing-masing state untuk kondisi mantap dapat dihitung sebagaiberikut.
[ ] [ ]215
45
1
31
32
21 PPPP =
(9.9)
atau
2254
131
1251
132
PPP
PPP
=+=+
(9.10)
yang bisa disederhanakan menjadi
0
0
251
131
251
131
=−=+−
PP
PP(9.11)
Kedua persamaan di atas adalah identik, sehingga untukmenyelesaikan kedua persamaan di atas diperlukan sebuahpersamaan lagi yaitu
121 =+ PP (9.12)
13
Dengan mengambil salah satu persamaan dari dua persamaanyang ada pada persamaan (9.11) dan persamaan (9.12), maka akanterbentuk dua buah persamaan simultan. Kedua persamaan simultanini dapat ditulis menjadi sebuah persamaan matrik yaitu
=
−1
0
11 2
151
31
P
P(9.13)
Persamaan matrik di atas dapat diselesaikan denganmenggunakan teknik penyelesaian standar seperti metode Cramer,eliminasi Gauss dan berbagai teknik penyelesaian lain. Solusi daripersamaan (9.13) adalah P1 = 3/5 dan P2 = 5/8.
Untuk sistem yang memiliki matrik STP dengan ordo lebih dari2x2, maka salah satu persamaan yang dihasilkan oleh persamaan(9.8) harus diganti dengan persamaan yang memiliki bentuk sepertipersamaan (9.12). Sebagai contoh, bila matrik STP suatu sistemberordo 3x3, maka persamaan (9.12) akan berubah menjadi P1 + P2
+ P3 = 1.
9.6 Absorbing State
Pada seksi terdahulu telah dijelaskan definisi dari absorbingstate, yaitu sekali suatu sistem memasuki state ini maka sistem itutidak akan bisa keluar dari state ini kecuali sistem ini memulai misiyang baru. Sistem yang memiliki sifat seperti ini bisa dikategorikansebagai sistem yang berorientasi pada misi (mission oriented
14
system). Pada kasus tertentu, satu persyaratan dari analisakeandalan adalah untuk mengevaluasi jumlah rata – rata dari intervalwaktu dimana sistem berada pada salah satu non-absorbing state,atau dengan kata lain berapa kali interval sistem beroperasi sebelumsistem tersebut memasuki absorbing state.
Prinsip ini juga dapat diterapkan pada repairable system, yaituuntuk mengevaluasi jumlah rata – rata interval waktu sistem yangakan beroperasi secara memuaskan sebelum memasuki keadaanyang tidak diinginkan. Pada kasus ini state yang dimaksud bukanlahmerupakan absorbing state yang nyata karena keadaan ini dapatditinggalkan setelah aksi reparasi dilakukan. Berikut ini akandiuraikan metode perhitungan yang dipakai untuk menghitung berapainterval waktu rata – rata dari suatu sistem sebelum absorbing statetercapai.
Jika P merupakan matrik STP dari sistem, sebuah truncatedmatrix Q dapat dibuat dengan menghapus kolom dan baris matrikyang berkaitan dengan absorbing state. Untuk persamaan (9.1) yangmewakili sebuah matrik STP sistem, jika state 2 didefinisikan sebagaiabsorbing state, maka matrik Q hanya akan memiliki satu elemen,yaitu [P11]. Ini terjadi karena kolom kedua dan baris kedua darimatrik STP tersebut telah dihilangkan.
Secara umum, nilai harapan dari sebuah variabel randomdidefinisikan oleh
∑∞
=
=1i
iiPxxE )( (9.14)
Persamaan ini tidak hanya berlaku untuk elemen probabilitas tunggalPi tetapi juga untuk elemen probabilitas multi yang dinyatakan olehmatrik Q. Oleh karena itu jika N menyatakan jumlah interval waktuyang diharapkan, maka
15
12 1111 −++++= nQQQIN .... (9.15)
dimana I merupakan matrik identitas.Angka 1 pada tiap – tiap suku dapat dijelaskan sebagai berikut.
Untuk suku pertama, 1 mewakili kontribusi terhadap nilai harapandari sistem yang mulai beroperasi pada state 1, sedangkan angka 1yang berada pada suku kedua mewakili kontribusi terhadap nilaiharapan dari sistem yang mulai beroperasi pada state 2, begituseterusnya. Sedangkan matrik satuan I pada suku pertama mewakiliprobabilitas terjadinya interval waktu pertama, probabilitas terjadinyainterval waktu kedua dinyatakan dengan Q, sedangkan sedangkanprobabilitas terjadinya interval waktu ketiga dinyatakan dengan Q3
begitu seterusnya.Persamaan (9.15) bukan merupakan persamaan yang siap
untuk dievaluasi. Dengan mempertimbnagkan persamaan berikut ini
NN QIQQQIQI −=++++− − ]...][[ 12 (9.16)
Karena nilai – nilai elemen matrik Q adalah kurang dari 1, maka akan
berlaku 0=∞→
nQn
lim, sehingga IQI n →− , dan persamaan (9.16)
berubah menjadi
IQQQIQI N =++++− − ]...][[ 12
16
atau
112 −− −=++++ ][]...[ QIQQQI N
Oleh karena itu, dari persamaan(9.15) dan (9.16) akan diperoleh
1−−= ][ QIN (9.17)
Contoh 9.3
Dengan menggunakan state – space diagram pada gambar 9.1, jikadidefinisikan state 2 merupakan absorbing state, tentukan untukberapa kali interval sistem itu rata – rata akan beroperasi sebelummencapai absorbing state.
Solusi
Jika state 2 didefinisikan sebagai absorbing state, maka truncatedmatrix Q dapat ditentukan sebagai berikut.
Q = P11 = ½
Sehingga
N = [ 1-1/2]-1 = 2
Jadi rata – rata sistem itu akan beroperasi selama 2 interval waktusebelum state 2 dimasuki. q
17
9.7 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. Henley, E.J. and Hiromitsu Kumamoto [1992], Probabilistic RiskAssessment : reliability Engineering, Design, and Analysis, IEEEPress, New York.
3. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
4. Ramakumar, R [1993]., Engineering Reliability : Fundamentalsand Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 4
18
Proses Markov Kontinyu(Continuous MarkovProcesses)
10.1 Pendahuluan
Masalah keandalan yang berhubungan dengan sistem secaranormal adalah space memiliki sifat diskrit - yaitu sistem tersebutdapat eksis pada salah satu keadaan diskrit dengan state yang dapatdiidentifikasi – dan sistem tersebut eksis secara kontinyu pada salahsatu state sampai terjadi sebuah transisi yang membawa sistemtersebut secara diskrit dari satu state ke state yang lain. Teknikevaluasi yang ditulis pada seksi ini akan menyinggung sistem yangdapat didiskripsikan sebagai stationary Markov proces, yaituprobabilitas kegagalan kondisional atau reparasi selama intervalwaktu yang tertentu adalah konstan. Hal ini mengimplikasikan bahwakarakteristik kegagalan dan reparasi dari komponen berhubungandengan distribusi eksponensial.
Jika kondisi yang disyaratkan seperti di atas terpenuhi, makapendekatan Markov dapat dipakai untuk berbagai permasalahanreliabiity, termasuk sistem yang repairaple atau non-repairable, jugatermasuk sistem yang terhubung secara seri, paralel atau standby.
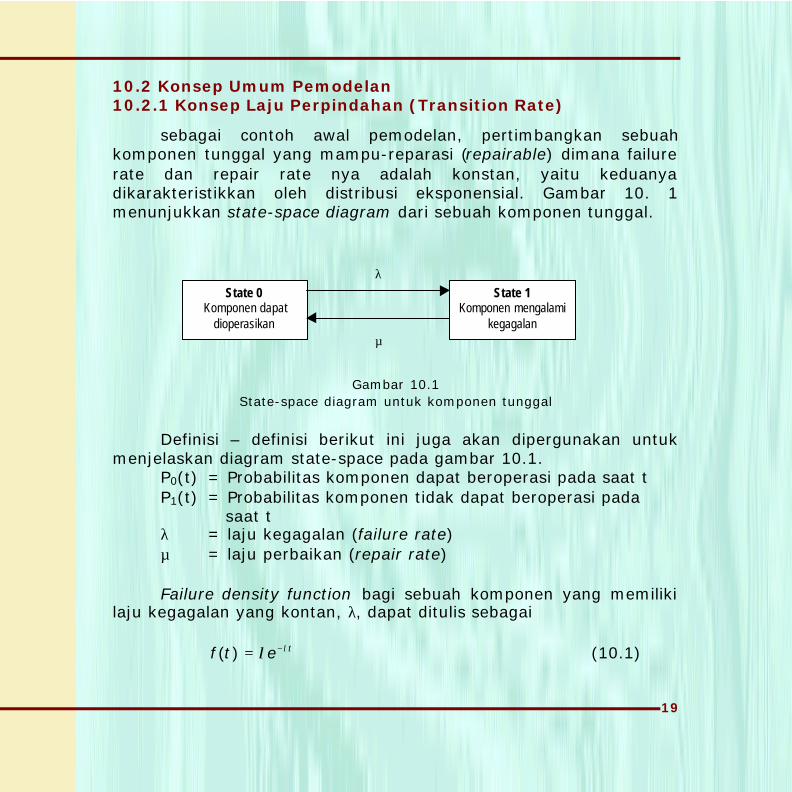
19
10.2 Konsep Umum Pemodelan10.2.1 Konsep Laju Perpindahan (Transition Rate)
sebagai contoh awal pemodelan, pertimbangkan sebuahkomponen tunggal yang mampu-reparasi (repairable) dimana failurerate dan repair rate nya adalah konstan, yaitu keduanyadikarakteristikkan oleh distribusi eksponensial. Gambar 10. 1menunjukkan state-space diagram dari sebuah komponen tunggal.
Gambar 10.1State-space diagram untuk komponen tunggal
Definisi – definisi berikut ini juga akan dipergunakan untukmenjelaskan diagram state-space pada gambar 10.1.
P0(t) = Probabilitas komponen dapat beroperasi pada saat tP1(t) = Probabilitas komponen tidak dapat beroperasi pada
saat tλ = laju kegagalan (failure rate)µ = laju perbaikan (repair rate)
Failure density function bagi sebuah komponen yang memilikilaju kegagalan yang kontan, λ, dapat ditulis sebagai
tetf λλ −=)( (10.1)
State 0Komponen dapat
dioperasikan
State 1Komponen mengalami
kegagalan
λ
µ
20
Dengan memanfaatkan persamaan (10.1), maka densityfunction diagram state-space pada gambar 10.1, density functionyang mewakili keadaan sistem pada saat beroperasi dan pada saatdalam keadaan gagal masing – masing dapat dituliskan sebagai
tetf λλ −=)(0 (10.2)
dan
tetf µµ −=)(1 (10.3)
Parameter – parameter λ dan µ menunjukkan laju transisi (transitionrate) karena masing –masing menyatakan dimana sistem berpindahdari satu keadaan ke keadaan yang lain.
10.2.2 Pengevaluasian Probabilitas yang Tergantung Waktu
State space diagram untuk komponen tunggal telahditunjukkan pada gambar 10.1. Pada discrete Markov chain,perpindahan dari satu keadaan ke keadaan lain ditunjukkan olehprobabilitas transitional. Untuk kasus continuous Markov processperpindahan dari satu keadaan ke keadaan lain dinyatakan oleh lajuperpindahan (transition rate), yaitu dengan parameter λ dan µ yangmasing – masing mewakili laju perubahan dari keadaan beroperasidan perubahan dari keadaan gagal.
Misalkan sebuah pertambahan interval waktu dt yang sangatkecil yang mewakili interval waktu pindah dari satu keadaan kekeadaan lain sehingga tidak memungkinkan terjadinya lebih dari satukegagalan pada interval waktu tersebut. Probabilitas bahwa
21
komponen tersebut tetap berada dalam keadaan beroperasi (state 0)pada saat (t + dt) dapat dinyatakan sebagai
[Probabilitas untuk tetap beroperasi pada saat t DAN tidakmengalami kegagalan pada saat dt] + [Probabilitas untukmengalami kegagalan pada saat t DAN akan dapat direparasipada saat dt]
Secara matematis, uraian di atas dapat ditulis sebagai berikut
))(())(()( dttPdttPdttP µλ 100 1 +−=+ (10.4)
atau
µλ )()()()(
tPtPdt
tPdttP10
00 +−=−+(10.5)
untuk dt à 0, maka
)(')()()(lim
tPdt
tdPdt
tPdttPdt 0
000
0==−+
→(10.6)
sehingga persamaan (10.5) akan berubah menjadi
µλ )()()(' tPtPtP 100 +−= (10.7)
Dengan pendekatan yang sama, probabilitas bahwa komponentersebut tetap berada dalam keadaan gagal (state 1) pada saat (t +dt) dapat dinyatakan sebagai
22
))(())(()( dttPdttPdttP λµ 011 1 +−=+ (10.8)
dimana untuk dt à 0 persamaan (10.8) dapat ditulis sebagai
)()()(' tPtPtP 101 µλ −= (10.9)
Persamaan (10.7) dan (10.9) dapat ditulis dalam sebuahbentuk persamaan matrik di bawah ini.
−
−=
µµλλ
)]()([)](')('[ tPtPtPtP 1010 (10.10)
Matrik koefisien pada persamaan (10.10) bukan merupakan matrikSTP karena penjumlahan semua koefisien pada satu barismenghasilkan nilai 0, sedangkan pada matrik STP akan menghasilkan1.
Persamaan (10.7) dan (10.9) merupakan persamaan diferensiallinier dengan koefisien – koefisen yang konstan. Kedua persamaan diatas dapat diselesaikan dengan berbagai cara. Salah satu cara yangpaling mudah dan banyak digunakan adalah dengan menggunakantransformasi La Place. Secara umum transformasi La Placedidefinisikan oleh
∫∞
−=0
dttfesF s t )()( (10.11)
sedangkan tabel 10.1 menunjukkan beberapa transformasi La Placeuntuk beberapa fungsi.
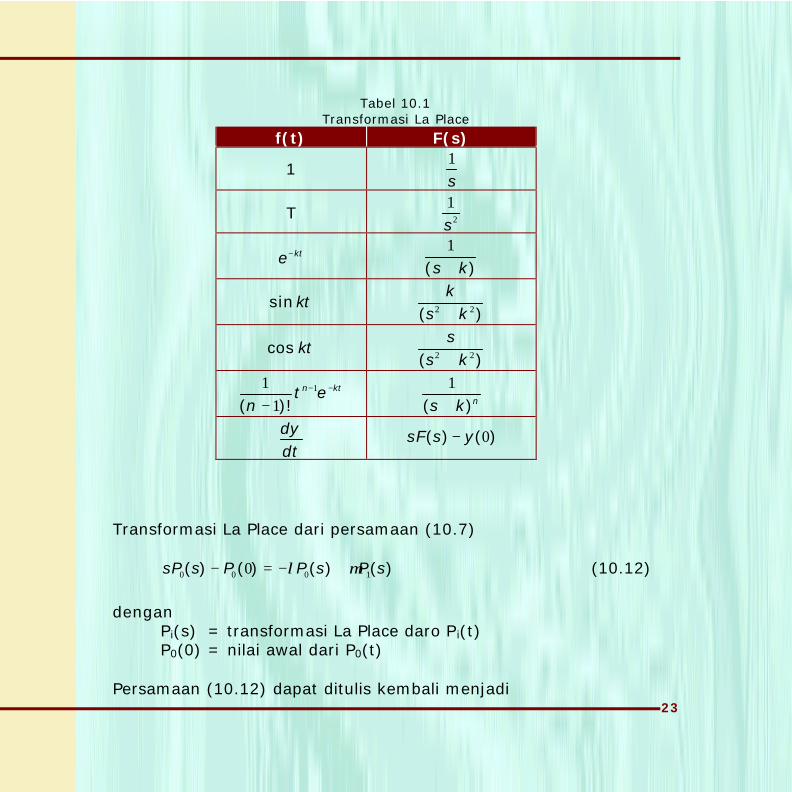
23
Tabel 10.1Transformasi La Place
f(t) F(s)
1s1
T 2
1s
kte−
)( ks +1
kt sin)( 22 ks
k+
kt cos)( 22 ks
s+
ktn etn
−−
−1
11
)!( nks )( +1
dtdy )()( 0yssF −
Transformasi La Place dari persamaan (10.7)
)()()()( sPsPPssP 1000 0 µλ +−=− (10.12)
denganPi(s) = transformasi La Place daro P i(t)P0(0) = nilai awal dari P0(t)
Persamaan (10.12) dapat ditulis kembali menjadi
24
)()()( 01
010 Ps
sPs
sPλλ
µ+
++
= (10.13)
demikian juga untuk persamaan (10.9), transformasi La Place daripersamaan ini dapat disederhanakan menjadi
)()()( 01
101 Ps
sPs
sPλλ
λ+
++
= (10.14)
denganP1(0) = nilai awal dari P1(t)
Persamaan (10.13) dan (10.14) dapat digunakan secaraserentak untuk mendapatkan nilai dari P0(s) dan P1(s), denganmenggunakan metode substitusi kita akan memperoleh
[ ])()()()(
)( 001100
1010
0 PPss
PPsP µλ
µλµλµλµ −
++⋅
++
+
+= (10.15)
[ ])()()()(
)( 001100
0110
1 PPss
PPsP λµ
µλµλµλλ −
++⋅
++
+
+= (10.16)
Persamaan (10.15) dan (10.16) harus ditransformasi kembali kefungsi waktu. Untuk itu, persamaan – persamaan di atas harusditransformasi kembali dengan menggunakan inverse transformasi LaPlace. Inverse transformasi La Place untuk persamaan (10.15) dan(10.16) masing – masing ditunjukkan oleh persamaan
25
[ ] [ ])()()()()()(
0000 10100 PPe
PPtPt
µλµλµλ
µ µλ
−+
+++
=+−
(10.17)
[ ] [ ])()()()()()(
0000 01101 PPe
PPtPt
λµµλµλ
λ µλ
−+
+++
=+−
(10.18)
Untuk semua kondisi akan berlaku P0(0) + P1(0) = 1, oleh karena itupersamaan (10.17) dan (10.18) akan berubah menjadi
[ ])()()()(
00 100 PPe
tPt
µλµλµλ
µ µλ
−+
++
=+−
(10.19)
[ ])()()()(
00 011 PPe
tPt
λµµλµλ
λ µλ
−+
++
=+−
(10.20)
Secara praktekpada umumnya sistem berawal dari state 0,yaitu sistem berada pada kondisi yang dapat dioperasikan pada saat t= 0. Untuk kasu ini P0(0) = 1 dan P1(0) = 0, dan persamaan (10.19)dan (10.20) dapat ditulis menjadi
µλµ
µλµ µλ
++
+=
+− tetP
)(
)(0 (10.21)
µλλ
µλλ µλ
+−
+=
+− tetP
)(
)(1 (10.22)
Persamaan (10.21) dan (10.22) masing – masing menyatakanprobabilitas dari sistem untuk berada pada keadaan beroperasi dan
26
gagal sebagai fungsi dari waktu dimana sistem mulai beroperasi padasaat t = 0 pada saat sistem dalam keadaan beroperasi.
10.2.3 Pengevaluasian Probabilitas Untuk Kondisi Batas
Probabilitas batas keadaan (Limiting state probability) atauprobabilitas untuk kondisi mantap (steady-state probability) tidakakan sama dengan nol untuk sebuah continuous Markov processdimana sistemnya adalah ergodic. Untuk kasus komponen tunggalyang repairable seperti yang ditunjukkan pada gambar 10.1,probabilitas batas keadaan dapat dihitung dari persamaan (10.21)dan (10.22) dengan membiarkan t à ∞ . Jika nilai dari probabilitaskondisi batas didefinisikan oleh P0 dan P1 masing – masing untukkeadaan beroperasi dan keadaan gagal, maka persamaan (10.21)dan (10.22) dapat ditulis menjadi
µλµ+
=0P (10.23)
µλλ+
=1P (10.24)
Ekspresi probabilitas batas keadaan dapat diterapkan tanpamemandang apakah sistem berawal dari keadaan beroperasi atauberawal dari keadaan gagal.
Salah satu karakteristik distribusi eksponensial adalah MTTFdari distribusi ini dapat diitung langsung dari λ
1=MTTF , dengan
demikian µ1=MTTR . Dengan mensubstitusikan kedua persamaan ini
ke dalam persamaan (10.23) dan (10.24), maka akan diperoleh
27
MTTRMTTFMTTF
P+
=0 (10.25)
MTTRMTTFMTTR
P+
=1 (10.26)
Nilai dari P0 dan P1 umumnya masing – masing dirujuk sebagaiketersediaan sistem pada keadaan mantap (steady state availability)A, dan ketaktersediaan sistem pada keadaan mantap (steady stateavailability) U. Sedangkan ketersediaan sistem yang tergantungwaktu (time dependent availability) diberikan oleh persamaan(10.21). Persamaan ini menyatakan probabilitas untuk mendapatkansistem dalam keadaan beroperasi pada saat t dimana sistem beradadalam keadaan beroperasi pada saat t = 0. Hal ini tentunnya sangatberbeda dengan keandalan R(t) yang diberikan oleh persamaan
tetR λ−=)(
Keandalan ini menyatakan probabilitas dari suatu sistem untuk tetapberada pada keadaan beroperasi sebagai fungsi dari waktu dimanasistem juga berada dalam keadaan beroperasi pada saat t = 0.Gambar 10.2 menunjukkan hubungan antara A(t) dan R(t).
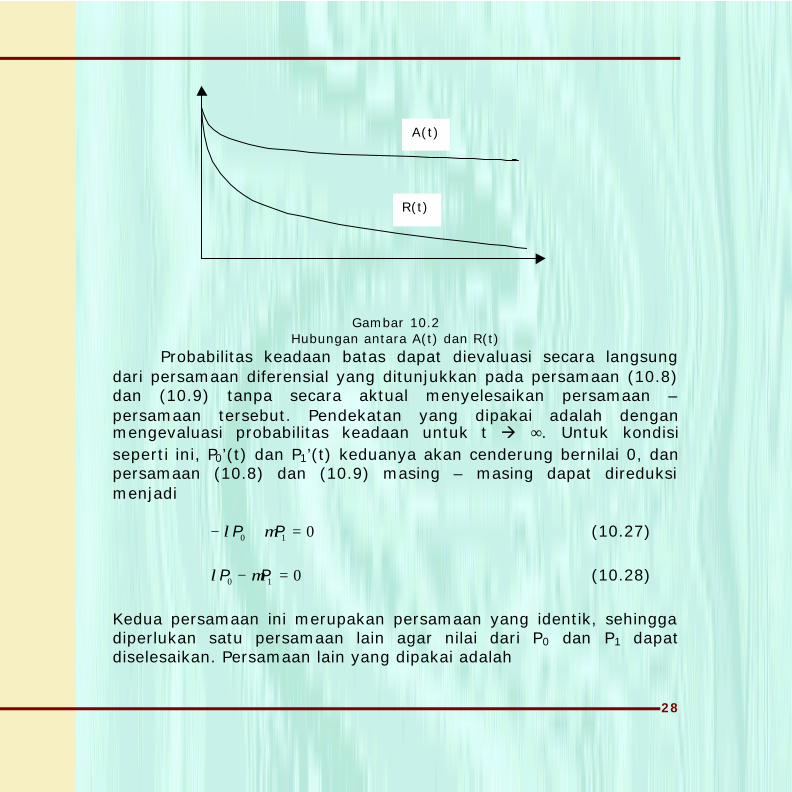
28
Gambar 10.2Hubungan antara A(t) dan R(t)
Probabilitas keadaan batas dapat dievaluasi secara langsungdari persamaan diferensial yang ditunjukkan pada persamaan (10.8)dan (10.9) tanpa secara aktual menyelesaikan persamaan –persamaan tersebut. Pendekatan yang dipakai adalah denganmengevaluasi probabilitas keadaan untuk t à ∞. Untuk kondisiseperti ini, P0’(t) dan P1’(t) keduanya akan cenderung bernilai 0, danpersamaan (10.8) dan (10.9) masing – masing dapat direduksimenjadi
010 =+− PP µλ (10.27)
010 =− PP µλ (10.28)
Kedua persamaan ini merupakan persamaan yang identik, sehinggadiperlukan satu persamaan lain agar nilai dari P0 dan P1 dapatdiselesaikan. Persamaan lain yang dipakai adalah
A(t)
R(t)
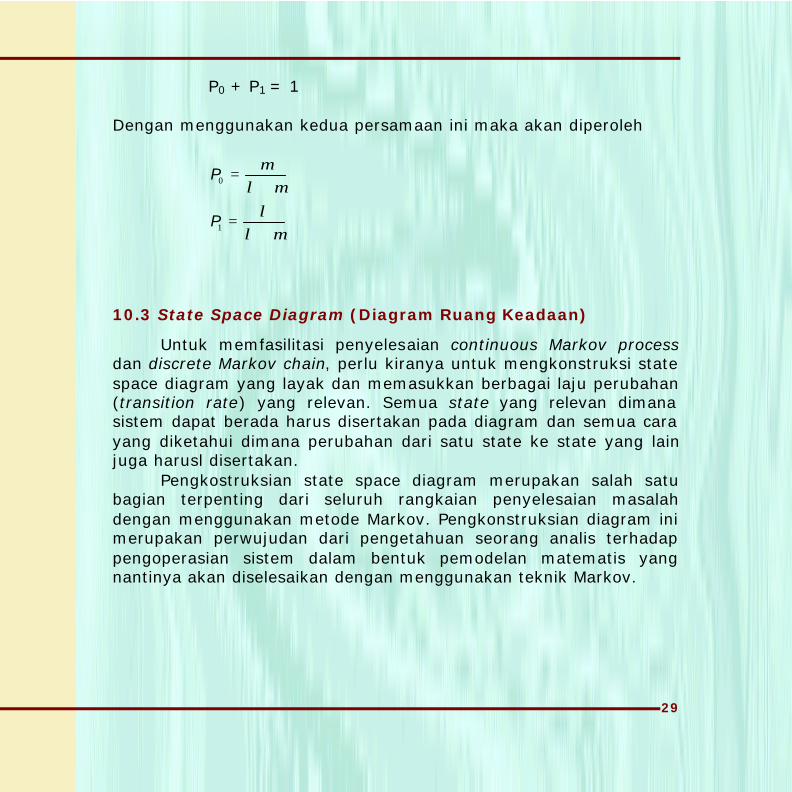
29
P0 + P1 = 1
Dengan menggunakan kedua persamaan ini maka akan diperoleh
µλµ+
=0P
µλλ+
=1P
10.3 State Space Diagram (Diagram Ruang Keadaan)
Untuk memfasilitasi penyelesaian continuous Markov processdan discrete Markov chain, perlu kiranya untuk mengkonstruksi statespace diagram yang layak dan memasukkan berbagai laju perubahan(transition rate) yang relevan. Semua state yang relevan dimanasistem dapat berada harus disertakan pada diagram dan semua carayang diketahui dimana perubahan dari satu state ke state yang lainjuga harusl disertakan.
Pengkostruksian state space diagram merupakan salah satubagian terpenting dari seluruh rangkaian penyelesaian masalahdengan menggunakan metode Markov. Pengkonstruksian diagram inimerupakan perwujudan dari pengetahuan seorang analis terhadappengoperasian sistem dalam bentuk pemodelan matematis yangnantinya akan diselesaikan dengan menggunakan teknik Markov.
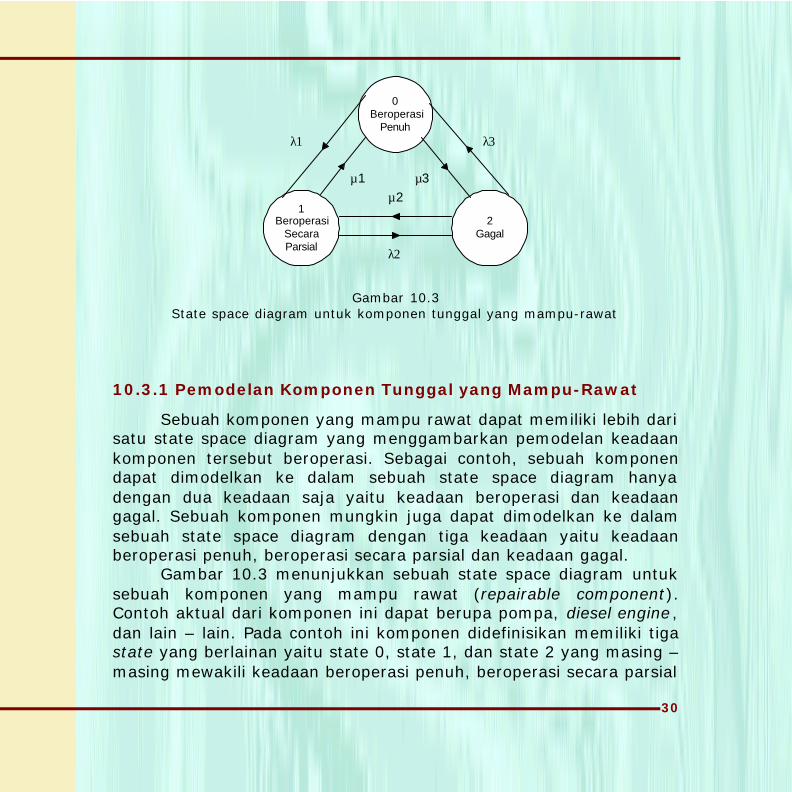
30
0Beroperasi
Penuh
1Beroperasi
SecaraParsial
2Gagal
µ2
µ1 µ3
λ1
λ2
λ3
Gambar 10.3State space diagram untuk komponen tunggal yang mampu-rawat
10.3.1 Pemodelan Komponen Tunggal yang Mampu-Rawat
Sebuah komponen yang mampu rawat dapat memiliki lebih darisatu state space diagram yang menggambarkan pemodelan keadaankomponen tersebut beroperasi. Sebagai contoh, sebuah komponendapat dimodelkan ke dalam sebuah state space diagram hanyadengan dua keadaan saja yaitu keadaan beroperasi dan keadaangagal. Sebuah komponen mungkin juga dapat dimodelkan ke dalamsebuah state space diagram dengan tiga keadaan yaitu keadaanberoperasi penuh, beroperasi secara parsial dan keadaan gagal.
Gambar 10.3 menunjukkan sebuah state space diagram untuksebuah komponen yang mampu rawat (repairable component).Contoh aktual dari komponen ini dapat berupa pompa, diesel engine ,dan lain – lain. Pada contoh ini komponen didefinisikan memiliki tigastate yang berlainan yaitu state 0, state 1, dan state 2 yang masing –masing mewakili keadaan beroperasi penuh, beroperasi secara parsial
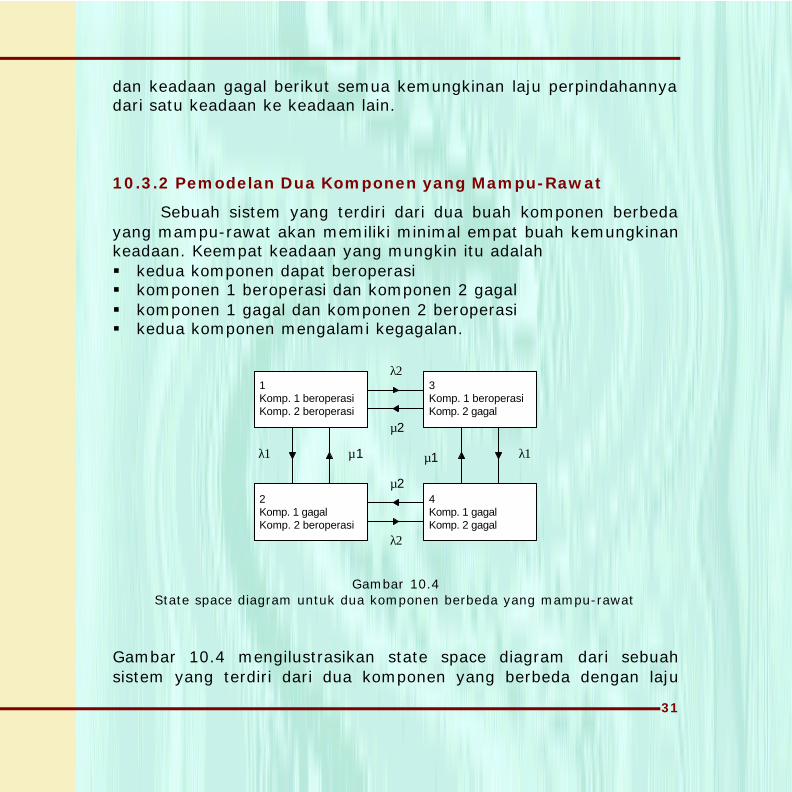
31
dan keadaan gagal berikut semua kemungkinan laju perpindahannyadari satu keadaan ke keadaan lain.
10.3.2 Pemodelan Dua Komponen yang Mampu-Rawat
Sebuah sistem yang terdiri dari dua buah komponen berbedayang mampu-rawat akan memiliki minimal empat buah kemungkinankeadaan. Keempat keadaan yang mungkin itu adalah§ kedua komponen dapat beroperasi§ komponen 1 beroperasi dan komponen 2 gagal§ komponen 1 gagal dan komponen 2 beroperasi§ kedua komponen mengalami kegagalan.
1Komp. 1 beroperasiKomp. 2 beroperasi
3Komp. 1 beroperasiKomp. 2 gagal
4Komp. 1 gagalKomp. 2 gagal
2Komp. 1 gagalKomp. 2 beroperasi
λ1
λ2
λ1
λ2
µ1 µ1
µ2
µ2
Gambar 10.4State space diagram untuk dua komponen berbeda yang mampu-rawat
Gambar 10.4 mengilustrasikan state space diagram dari sebuahsistem yang terdiri dari dua komponen yang berbeda dengan laju
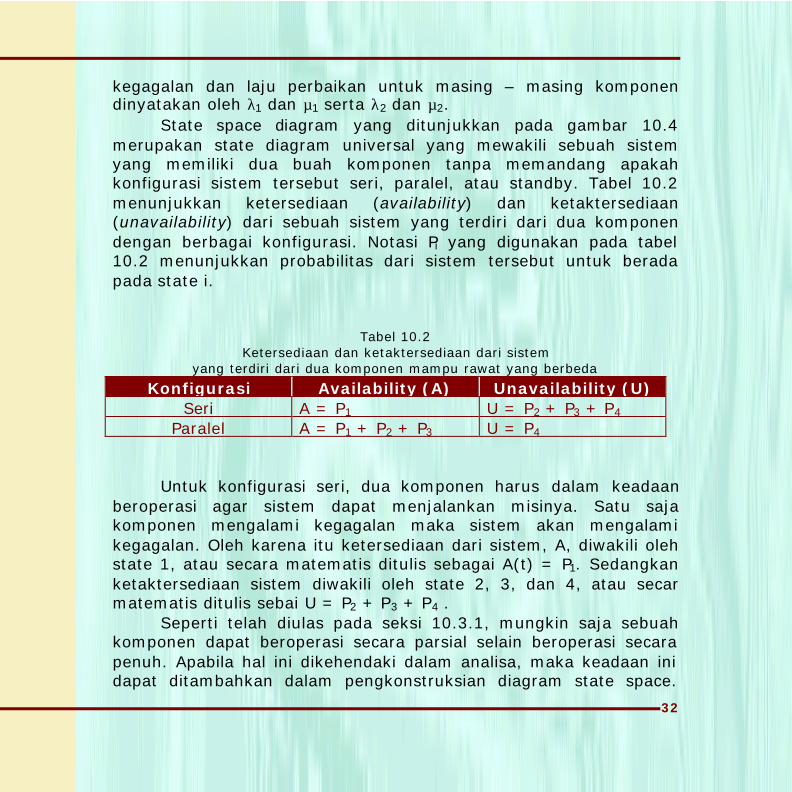
32
kegagalan dan laju perbaikan untuk masing – masing komponendinyatakan oleh λ1 dan µ1 serta λ2 dan µ2.
State space diagram yang ditunjukkan pada gambar 10.4merupakan state diagram universal yang mewakili sebuah sistemyang memiliki dua buah komponen tanpa memandang apakahkonfigurasi sistem tersebut seri, paralel, atau standby. Tabel 10.2menunjukkan ketersediaan (availability) dan ketaktersediaan(unavailability) dari sebuah sistem yang terdiri dari dua komponendengan berbagai konfigurasi. Notasi Pi yang digunakan pada tabel10.2 menunjukkan probabilitas dari sistem tersebut untuk beradapada state i.
Tabel 10.2Ketersediaan dan ketaktersediaan dari sistem
yang terdiri dari dua komponen mampu rawat yang berbeda
Konfigurasi Availability (A) Unavailability (U)Seri A = P1 U = P2 + P3 + P4
Paralel A = P1 + P2 + P3 U = P4
Untuk konfigurasi seri, dua komponen harus dalam keadaanberoperasi agar sistem dapat menjalankan misinya. Satu sajakomponen mengalami kegagalan maka sistem akan mengalamikegagalan. Oleh karena itu ketersediaan dari sistem, A, diwakili olehstate 1, atau secara matematis ditulis sebagai A(t) = P1. Sedangkanketaktersediaan sistem diwakili oleh state 2, 3, dan 4, atau secarmatematis ditulis sebai U = P2 + P3 + P4 .
Seperti telah diulas pada seksi 10.3.1, mungkin saja sebuahkomponen dapat beroperasi secara parsial selain beroperasi secarapenuh. Apabila hal ini dikehendaki dalam analisa, maka keadaan inidapat ditambahkan dalam pengkonstruksian diagram state space.
33
Perlu dicatat pula bahwa untuk transisi tertentu di dalam model statespace mungkin secara fisik tidak mungkin dan harus dihilangkan dantransisi lain mungkin harus ditambahkan. Sebagai contoh jika keduakomponen di dalam sistem mengalami kegagalan, perbaikankomponen 2 mungkin tidak akan dilakukan sebelum komponen 1selesai diperbaiki sehingga transisi dari state µ2 dari state 4 ke state2 tidak ada. Selain itu, mungkin saja kedua komponen akanmengalami kegagalan secara serentak sehingga transisi dari state 1ke state 4 menjadi ada.
Untuk situasi praktis tertentu, state space diagram padagambar 10.4 dapat disederhanakan dan direduksi. Sebagai contoh,jika salah satu komponen mengalami kegagalan untuk sistem dengankonfigurasi seri, maka komponen lain tidak lagi beroperasi dan lajuperubahannya untuk situasi ini menjadi nol. Sehingga untuk kasus inistate 4 menjadi tidak ada.
Jika kedua komponen adalah identik, maka state 2 dan state 3juga akan identik sehingga kedua state ini dapt dikombinasikan yangpada akhirnya akan mengurangi jumlah model state space dari 4state menjadi 3 state seperti yang ditunjukkan pada gambar 10.5.Laju kegagalan 2λ dan 2µ pada gambar 10.4 menunjukkan bahwamasing – masing ada dua komponen yang tersedia untuk mengalamikegagalan atau untuk diperbaiki pada pertambahan waktu berikutnyadan hanya ada satu dari dua komponen yang dapat mengalamikegagalan atau direparasi, tetapi tidak kedua-duanya pada intervalwaktu tersebut.
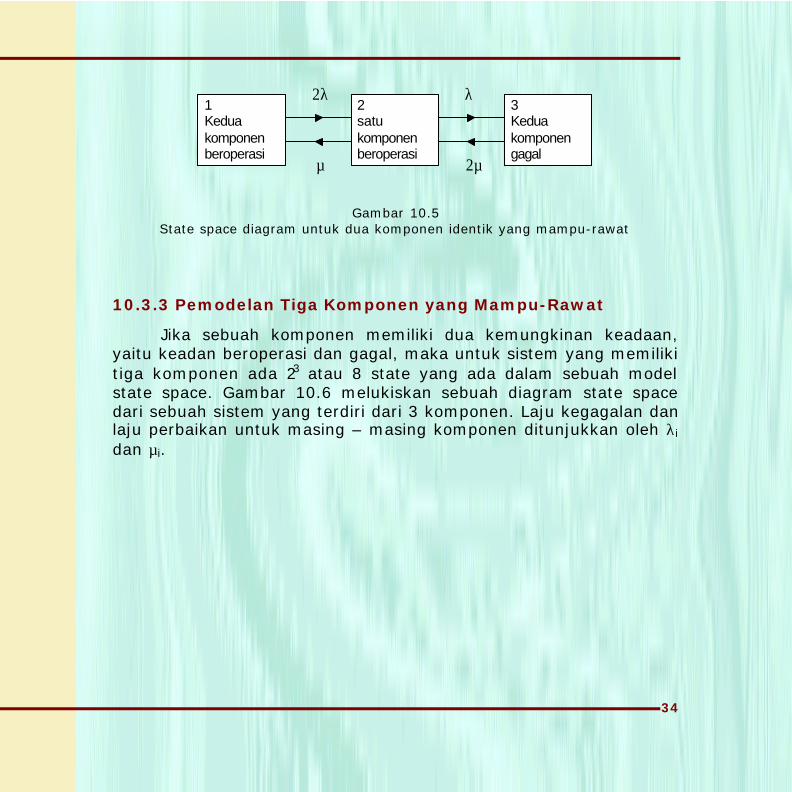
34
1Keduakomponenberoperasi
3Keduakomponengagal
2satukomponenberoperasi
2λ λ
µ 2µ
Gambar 10.5State space diagram untuk dua komponen identik yang mampu-rawat
10.3.3 Pemodelan Tiga Komponen yang Mampu-Rawat
Jika sebuah komponen memiliki dua kemungkinan keadaan,yaitu keadan beroperasi dan gagal, maka untuk sistem yang memilikitiga komponen ada 23 atau 8 state yang ada dalam sebuah modelstate space. Gambar 10.6 melukiskan sebuah diagram state spacedari sebuah sistem yang terdiri dari 3 komponen. Laju kegagalan danlaju perbaikan untuk masing – masing komponen ditunjukkan oleh λi
dan µi.
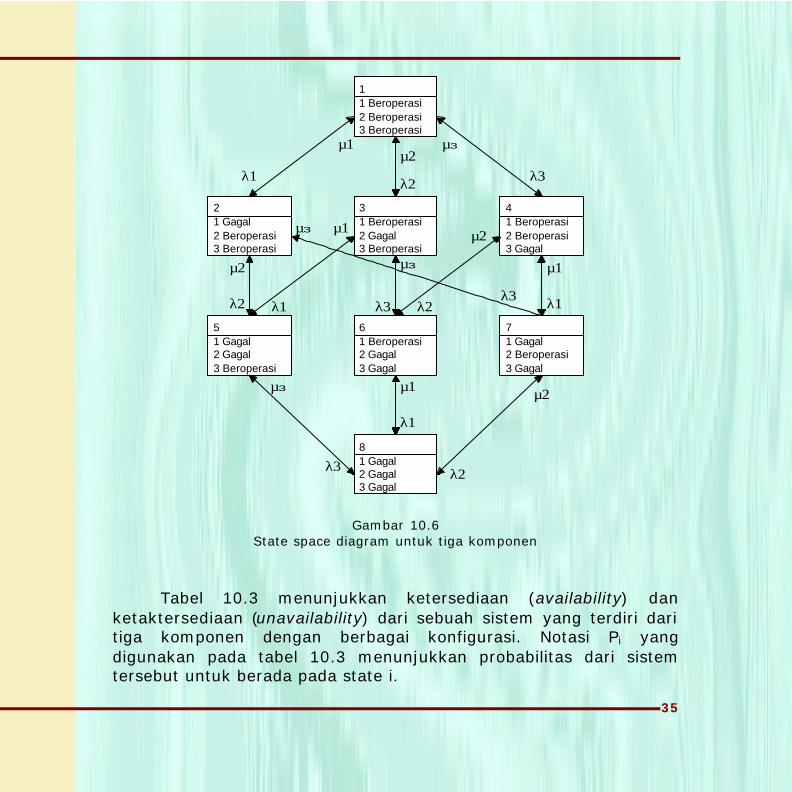
35
11 Beroperasi2 Beroperasi3 Beroperasi
21 Gagal2 Beroperasi3 Beroperasi
31 Beroperasi2 Gagal3 Beroperasi
41 Beroperasi2 Beroperasi3 Gagal
51 Gagal2 Gagal3 Beroperasi
61 Beroperasi2 Gagal3 Gagal
71 Gagal2 Beroperasi3 Gagal
81 Gagal2 Gagal3 Gagal
µ1 µ3µ2
µ1
µ1
µ1
µ2
µ2
µ2
µ3
µ3
µ3
λ1 λ2 λ3
λ1 λ1
λ1
λ2
λ2
λ2
λ3
λ3λ3
Gambar 10.6State space diagram untuk tiga komponen
Tabel 10.3 menunjukkan ketersediaan (availability) danketaktersediaan (unavailability) dari sebuah sistem yang terdiri daritiga komponen dengan berbagai konfigurasi. Notasi Pi yangdigunakan pada tabel 10.3 menunjukkan probabilitas dari sistemtersebut untuk berada pada state i.
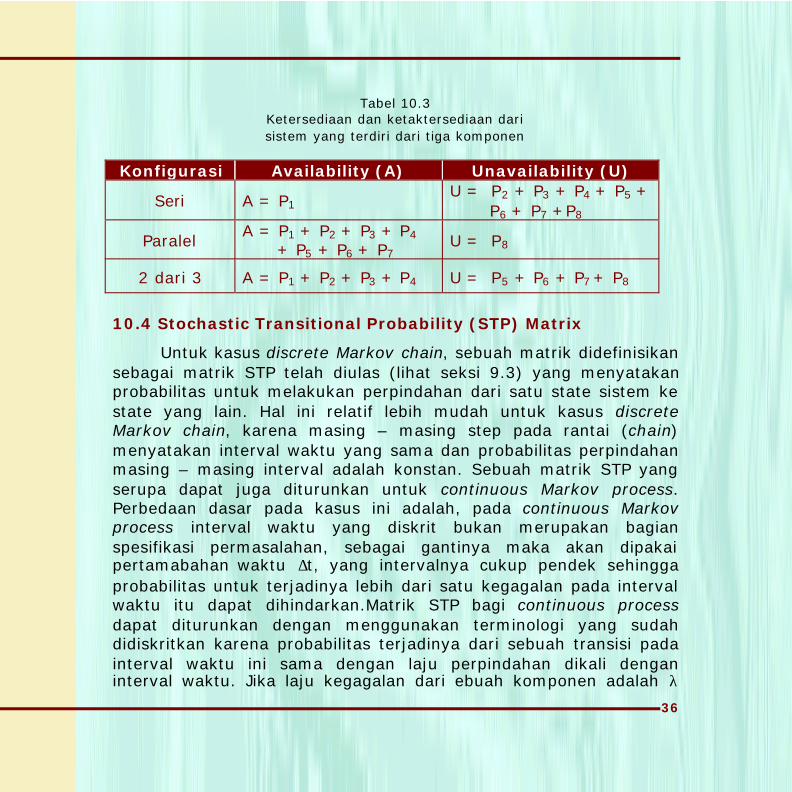
36
Tabel 10.3Ketersediaan dan ketaktersediaan darisistem yang terdiri dari tiga komponen
Konfigurasi Availability (A) Unavailability (U)
Seri A = P1U = P2 + P3 + P4 + P5 + P6 + P7 +P8
ParalelA = P1 + P2 + P3 + P4
+ P5 + P6 + P7U = P8
2 dari 3 A = P1 + P2 + P3 + P4 U = P5 + P6 + P7 + P8
10.4 Stochastic Transitional Probability (STP) Matrix
Untuk kasus discrete Markov chain, sebuah matrik didefinisikansebagai matrik STP telah diulas (lihat seksi 9.3) yang menyatakanprobabilitas untuk melakukan perpindahan dari satu state sistem kestate yang lain. Hal ini relatif lebih mudah untuk kasus discreteMarkov chain, karena masing – masing step pada rantai (chain)menyatakan interval waktu yang sama dan probabilitas perpindahanmasing – masing interval adalah konstan. Sebuah matrik STP yangserupa dapat juga diturunkan untuk continuous Markov process.Perbedaan dasar pada kasus ini adalah, pada continuous Markovprocess interval waktu yang diskrit bukan merupakan bagianspesifikasi permasalahan, sebagai gantinya maka akan dipakaipertamabahan waktu ∆t, yang intervalnya cukup pendek sehinggaprobabilitas untuk terjadinya lebih dari satu kegagalan pada intervalwaktu itu dapat dihindarkan.Matrik STP bagi continuous processdapat diturunkan dengan menggunakan terminologi yang sudahdidiskritkan karena probabilitas terjadinya dari sebuah transisi padainterval waktu ini sama dengan laju perpindahan dikali denganinterval waktu. Jika laju kegagalan dari ebuah komponen adalah λ
37
maka probabilitas dari sebuah kegagalan pada waktu ∆t adalah λ∆tdan probabilitas untuk tidak mengalami kegagalan pada interval ∆t iniadalah 1 – λ∆t.
Untuk kasus sebuah komponen yang mampu rawat sepertiyang ditunjukkan pada gambar 10.1, maka matrik STP-nya adalah
∆−∆
∆∆−=
tttt
Pµµ
λλ1
1(10.29)
10.5 Pengevaluasian Probabilitas Untuk Kondisi Batas
10.5.1 Komponen Tunggal yang Mampu-Rawat
Pada seksi 9.5 telah ditunjukkan bahwa matrik STP memangsecara ideal diperuntukkan untuk mengevaluasi probabilitas kondisibatas (limiting state probability). Pendekatan yang dilakukan adlaahdengan mendefinisikan matrik A sebagai vektor probabilitas kondisibatas yang tidak akan berubah jika dikalikan dengna matrik STP,yaitu
AAP = (10.30)
Jika A adalah [ ]10 PP untuk komponen tunggal yang mampu rawat,
maka dari persamaan (10.29) dan persamaan (10.30)
[ ] [ ]1010 1
1PP
tttt
PP =
∆−∆
∆∆−µµ
λλ(10.31)
38
yang dapat ditulis dalam bentuk eksplisit
0101 PtPPt =∆+∆− µλ )( (10.32)
110 1 PtPtP =∆−+∆ )( µλ (10.33)
dan dapat disederhanakan menjadi
010 =∆+∆− tPtP µλ (10.34)010 =∆−∆ tPtP µλ (10.35)
Pada persamaan (10.34) dan (10.35) nilai dari ∆t adalah tidak nol,sehingga kedua persamaan di atas dapat disederhanakan menjadi
010 =+− PP µλ (10.36)010 =− PP µλ (10.37)
yang identik dengan persamaan (10.27) dan (10.28) yang juga
memiliki solusi µλ
µ+
=0P dan µλ
λ+
=1P .
Suku ∆t yang muncul pada persamaan (10.34) dan (10.35)dapat dihilangkan, oleh karena itu akan lebih mudah bilamenghapuskan seluruh ∆t pada saat memformulasikan matrik awaldan mengekspresikan probabilitas perubahan dalam bentuk lajuperubahan. Untuk kasus ini matrik STP yang diberikan padapersamaan (10.29) akan berubah menjadi
−
−=
µµλλ
1
1P (10.38)
39
Perlu ditekannkan bahwa persamaan (10.38) merupakan bentuk taklengkap dari matrik STP karena λ dan µ bukanlah secara khususmenyatakan probabilitas.
10.5.2 Dua Komponen yang Mampu-Rawat
Untuk kasus ini, state space diagram dari dua komponenditunjukkan oleh gambar 10.5. Matrik STP untuk state space diagramini adalah
−−−
−=
µµλµλµ
λλ
2120
1
0221
P (10.39)
Oleh karena itu, jika vektor probabilitas kondisi batasnyaadalah [ ]321 PPP , maka persamaan (10.30) dapat ditulis menjadi
[ ] [ ] P P 11 3232
2120
1
0221
PPPP =
−−−
−
µµλµλµ
λλ(10.40)
yang dapat ditulis dalam bentuk eksplisit
12121 PPP =+− µλ)( (10.41)
2321 212 PPPP =+−−+ µµλλ )( (10.42)
40
332 21 PPP =−+ )( µλ (10.43)
Dengan menyusun ulang ketiga persamaan di atas menjadi
02 21 =+− PP µλ (10.44)
022 321 =++− PPP µµλλ )( (10.45)
02 32 =− PP µλ (10.46)
Probabilitas keadaan batas untuk masing – masing keadaan dapatdihitung secara langsung dengan menyelesaikan tiga buahpersamaan serentak, dimana dua diantaranya dipilih dari persamaan(10.44) sampai (10.46) sedangkan satu persamaan lainnya adalahpersamaan 1321 =++ PPP . Solusi dari ketiga persamaan serentak itu
adalah
( ) ( ) ( )2
2
3222
2
1
2
µλλ
µλλµ
µλµ
+=
+=
+= PPP (10.47)
Tabel 10.4 menunjukkan ketersediaan (availability) danketaktersediaan (unavailability) dari sebuah sistem yang terdiri daridua komponen dengan berbagai konfigurasi. Notasi Pi yangdigunakan pada tabel 10.4 menunjukkan probabilitas dari sistemtersebut untuk berada pada state i.
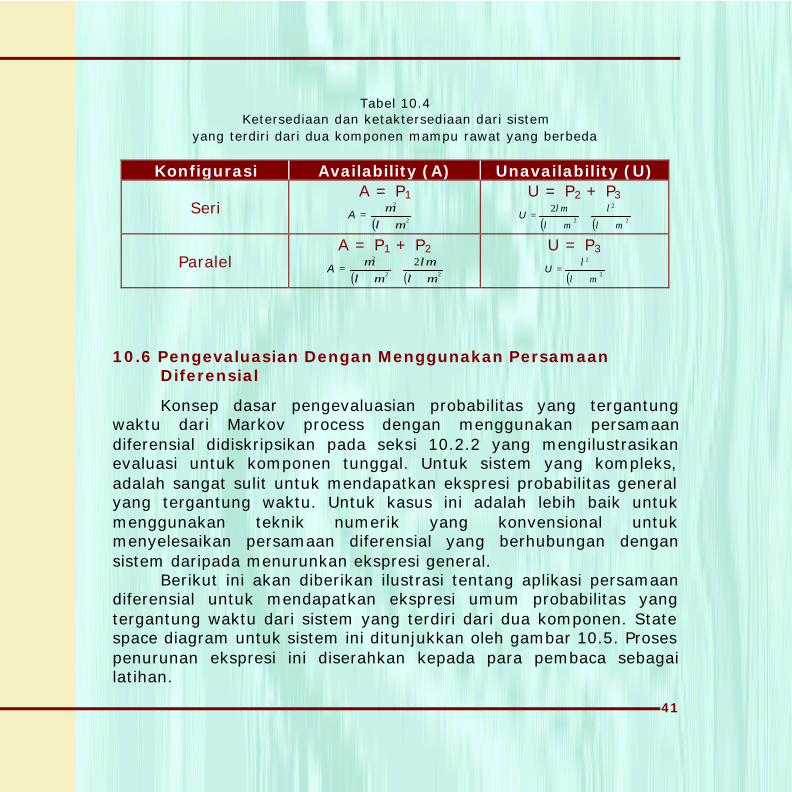
41
Tabel 10.4Ketersediaan dan ketaktersediaan dari sistem
yang terdiri dari dua komponen mampu rawat yang berbeda
Konfigurasi Availability (A) Unavailability (U)
SeriA = P1
( )
2
2
µλµ+
=A
U = P2 + P3
( ) ( )2
2
2
2
µλ
λ
µλ
λµ
++
+= U
ParalelA = P1 + P2
( ) ( )22
2 2
µλλµ
µλµ
++
+=A
U = P3
( )2
2
µλ
λ
+=U
10.6 Pengevaluasian Dengan Menggunakan PersamaanDiferensial
Konsep dasar pengevaluasian probabilitas yang tergantungwaktu dari Markov process dengan menggunakan persamaandiferensial didiskripsikan pada seksi 10.2.2 yang mengilustrasikanevaluasi untuk komponen tunggal. Untuk sistem yang kompleks,adalah sangat sulit untuk mendapatkan ekspresi probabilitas generalyang tergantung waktu. Untuk kasus ini adalah lebih baik untukmenggunakan teknik numerik yang konvensional untukmenyelesaikan persamaan diferensial yang berhubungan dengansistem daripada menurunkan ekspresi general.
Berikut ini akan diberikan ilustrasi tentang aplikasi persamaandiferensial untuk mendapatkan ekspresi umum probabilitas yangtergantung waktu dari sistem yang terdiri dari dua komponen. Statespace diagram untuk sistem ini ditunjukkan oleh gambar 10.5. Prosespenurunan ekspresi ini diserahkan kepada para pembaca sebagailatihan.
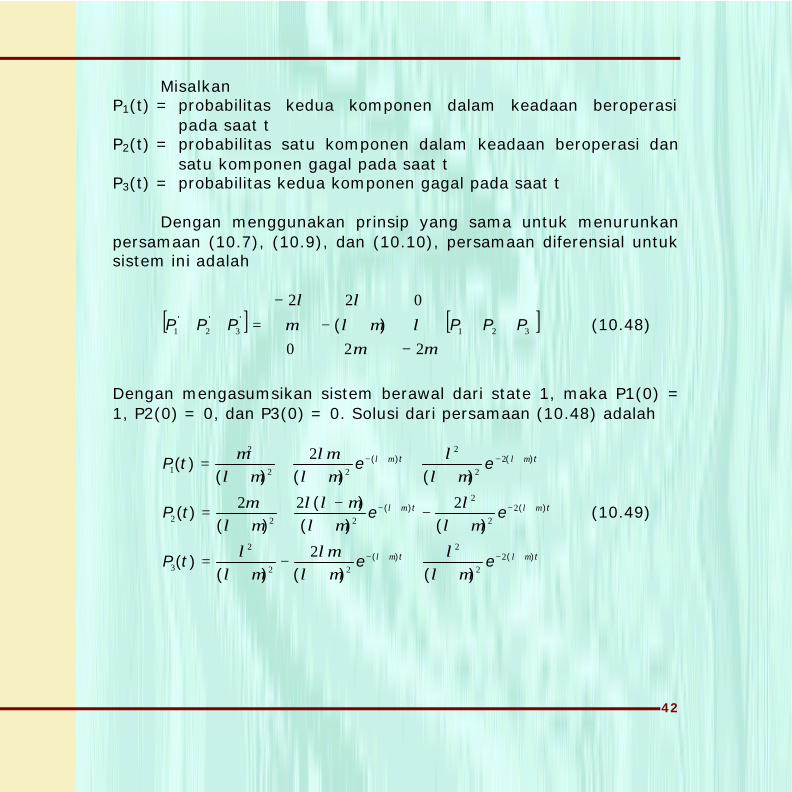
42
MisalkanP1(t) = probabilitas kedua komponen dalam keadaan beroperasi
pada saat tP2(t) = probabilitas satu komponen dalam keadaan beroperasi dan
satu komponen gagal pada saat tP3(t) = probabilitas kedua komponen gagal pada saat t
Dengan menggunakan prinsip yang sama untuk menurunkanpersamaan (10.7), (10.9), dan (10.10), persamaan diferensial untuksistem ini adalah
[ ] [ ]321321
220
022
PPPPPP )('''
−+−
−=
µµλµλµ
λλ(10.48)
Dengan mengasumsikan sistem berawal dari state 1, maka P1(0) =1, P2(0) = 0, dan P3(0) = 0. Solusi dari persamaan (10.48) adalah
tt
tt
tt
eetP
eetP
eetP
)()(
)()(
)()(
)()()()(
)()()(
)()(
)()()()(
µλµλ
µλµλ
µλµλ
µλλ
µλλµ
µλλ
µλλ
µλµλλ
µλµ
µλλ
µλλµ
µλµ
+−+−
+−+−
+−+−
++
+−
+=
+−
+−+
+=
++
++
+=
22
2
22
2
3
22
2
222
22
2
22
2
1
2
222
2
(10.49)
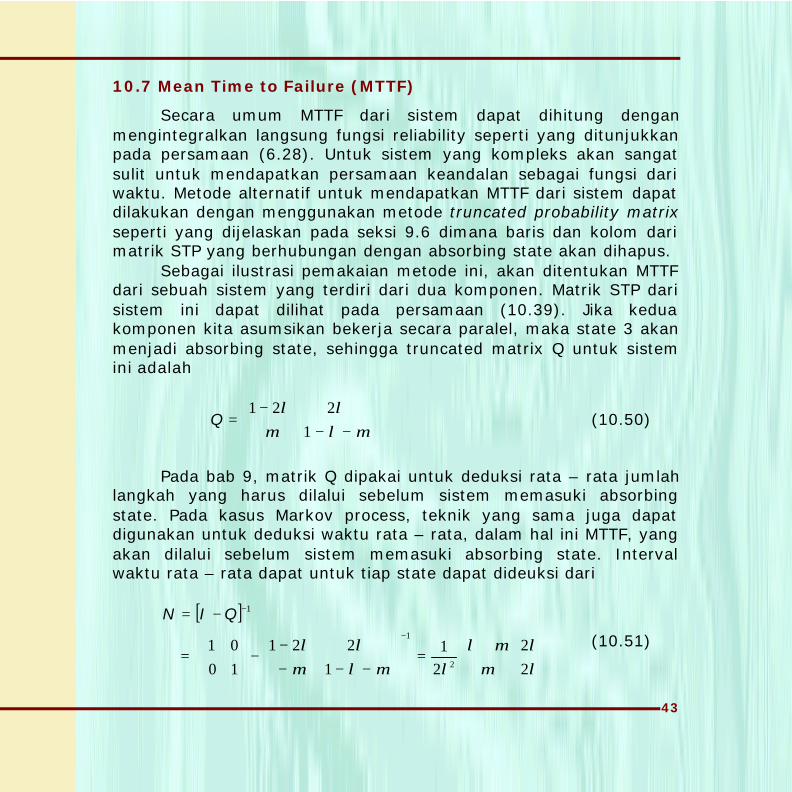
43
10.7 Mean Time to Failure (MTTF)
Secara umum MTTF dari sistem dapat dihitung denganmengintegralkan langsung fungsi reliability seperti yang ditunjukkanpada persamaan (6.28). Untuk sistem yang kompleks akan sangatsulit untuk mendapatkan persamaan keandalan sebagai fungsi dariwaktu. Metode alternatif untuk mendapatkan MTTF dari sistem dapatdilakukan dengan menggunakan metode truncated probability matrixseperti yang dijelaskan pada seksi 9.6 dimana baris dan kolom darimatrik STP yang berhubungan dengan absorbing state akan dihapus.
Sebagai ilustrasi pemakaian metode ini, akan ditentukan MTTFdari sebuah sistem yang terdiri dari dua komponen. Matrik STP darisistem ini dapat dilihat pada persamaan (10.39). Jika keduakomponen kita asumsikan bekerja secara paralel, maka state 3 akanmenjadi absorbing state, sehingga truncated matrix Q untuk sistemini adalah
−−
−=
µλµλλ
1
221Q (10.50)
Pada bab 9, matrik Q dipakai untuk deduksi rata – rata jumlahlangkah yang harus dilalui sebelum sistem memasuki absorbingstate. Pada kasus Markov process, teknik yang sama juga dapatdigunakan untuk deduksi waktu rata – rata, dalam hal ini MTTF, yangakan dilalui sebelum sistem memasuki absorbing state. Intervalwaktu rata – rata dapat untuk tiap state dapat dideuksi dari
[ ]
+=
−−−
−−
=
−=−
−
λµλµλ
λµλµλλ
2
2
21
1
221
10
012
1
1
QIN
(10.51)
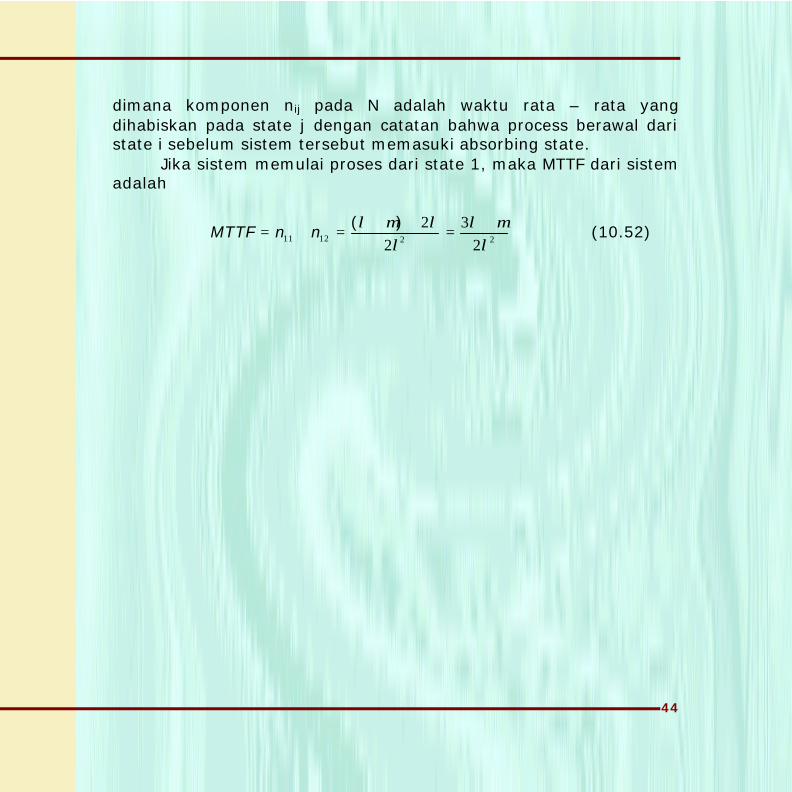
44
dimana komponen nij pada N adalah waktu rata – rata yangdihabiskan pada state j dengan catatan bahwa process berawal daristate i sebelum sistem tersebut memasuki absorbing state.
Jika sistem memulai proses dari state 1, maka MTTF dari sistemadalah
221211 23
22
λµλ
λλµλ +=++=+= )(
nnMTTF (10.52)
45
10.8 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. Henley, E.J. and Hiromitsu Kumamoto [1992], Probabilistic RiskAssessment : reliability Engineering, Design, and Analysis, IEEEPress, New York.
3. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
4. Ramakumar, R [1993]., Engineering Reliability : Fundamentalsand Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 4
46
Simulasi Monte Carlo
11.1 Konsep Simulasi
Metode evaluasi secara analitis sangat dimungkinkan untuksistem dengan konfigurasi yang sederhana. Untuk sistem yangkompleks, Bridges [1974] menyarankan untuk menggunakan tekniksimulasi yang dikenal dengan simulasi Monte Carlo. Simulasi MonteCarlo terdiri dari sebuah model matematis yang di set di dalamprogram komputer dan dengan menggunakan random sampling daridistribusi kegagalan dan distribusi reparasi dari masing-masingkomponen yang ada di dalam sistem, reliability dan availability darisistem dapat diprediksi. Random sampling merupakan hasil darirandom number generator. Random sampling ini kemudiandimanfaatkan untuk melakukan penilaian reliability dan availabilityatau parameter lain yang dikehendaki.
Keuntungan dan kekurangan teknik simulasi bila dibandingkandengan teknik analitis adalah sebagai berikut.
47
§ Waktu yang diperlukan untuk solusi secara analitis umumnyarelatif lebih singkat sedangkan untuk simulasi relatif lebih lama.Hal ini tidak menjadi masalah untuk simulasi yang dilakukandengan komputer yang mempunyai kecepatan dan memori yanglebih besar.
§ Pemodelan secara analitis akan selalu memberikan hasil numerikyang sama untuk sistem, model, dan satu set data yang sama,sedangkan hasil dari simulasi tergantung dari random numbergenerator yang dipakai dan jumlah simulasi yang dilakukan. Hasildari pendekatan secara analitis yang konsisten membangkitkankeyakinan bagi user tetapi mungkin juga menjadi tidak realistik.
§ Model yang dipergunakan untuk pendekatan secara analitisbiasanya merupakan penyederhanaan dari sebuah sistem, danterkadang terlalu disederhanakan sehingga menjadi tidak realistik.Sedangkan teknik simulasi dapat melibatkan dan menyimulasikansemua karakteristik sistem yang diketahui.
§ Teknik simulasi dapat memberikan output parameter denganrange yang sangat luas termasuk semua momen dan probabilitydensity function yang lengkap, sedangkan output dari metodeanalitis biasanya terbatas hanya pada expected value.
11.2 Random Number Generator
Random number merupakan hal terpenting untuk semua tekniksimulasi. Sebuah random number yang uniform mempunyai nilaiyang terdistribusi secara uniform pada interval (0,1), yaitu variabeldapat berniali sembarang antara 0 dan 1 dengan kemungkinan yangsama. Random number dapat diciptakan dengan sebuah komputerdigital dengan menggunakan algotima deterministik yang dikenaldengan random number generator. Karena random number
48
dihasilkan mengikuti algoritma matematis tertentu, maka randomnumber tersebut tidaklah benar-benar berupa random number danoleh karena itu disebut dengan pseudo-random number. Randomnumber generator harus memnuhi persyaratan minimal untuk dapatdipakai untuk menghasilkan random number. Berikut ini beberapakarakteristik yang harus dimiliki oleh random number generator.
§ Random number yang dihasilkan harus terdistribusi secarauniform dan acak.
§ Harus memiliki periode yang panjang sebelum urutan randomnumber yang dihasilkan terulang kembali.
§ Harus memiliki kemampuan reproduksi sehingga sequenceyang sama dapat diulangi.
§ Harus memiliki efisiensi dalam metode perhitungannya.
Algoritma populer yang sering dipakai untuk menghasilkanrandom number adalah congruential generator dimana randomnumber yang baru Xi+1 dalam satu urutan dihitung dari randomnumber yang terdahulu Xi dengan menggunakan persamaan
))(mod(1 BCAXX ii +=+ (11.1)
dengan,A = pengali (multiplier)B = modulusC = pertambahan
49
Beberapa subroutine random number generator denganmenggunakan algoritma congruential generator yang ditulis dalambahasa FORTRAN dapat dilihat pada [5].
11.3 Konversi Uniform Random Number
Serangkaian random number yang dihasilkan dari randomnumber generator merupakan basis untuk data input yang diperlukanuntuk simulasi Monte Carlo. Random number yang uniform terkadangdapat langsung dipakai untuk beberpa jenis simulasi. Untuk kasussimulasi evaluasi relibility, random number ini harus dikonversi kedistribusi non-uniform yang lain sebelum proses simulasi dapatdilakukan.
Metode transformasi invers (inverse transformation method)merupakan salah satu metode yang dapat dipakai untukmengkonversi uniform random number ke distribusi yang lain.Sedangkan distribusi dari fungsi invers yang diperoleh daripengkonversian suatu distribusi tertentu, dapat ditentukan sebagaiberikut.
Misalkan T menyatakan variabel random dengan cummulativedistribution function FT(t) , yang nilainya terus naik untuk semua t,sedemikian rupa sehingga )(1 yFT
− secara unik ditentukan oleh semuanilai y ∈ (0,1), dan lebih jauh Y = FT(T). Maka cummulativedistribution function FY(y) dari Y dapat diperoleh dengan
1 0untuk ))(())((
))(()()(11 <<==≤=
≤=≤=−− yyyFFyFTP
yTFPyYPyF
TTT
TY (11.2)
50
Dari sini terlihat bahwa Y = FT(T) memiliki distribusi uniform antara(0,1). Ini menyatakan bahwa jika variabel Y memiliki distribusiuniform antara (0,1) maka )(1 YFT T
−= memiliki distribusi yang samadengan fungsi distribusi FT(t).
11.4 Algoritma Simulasi
Untuk memberi ilustrasi bagaiman simulasi monte carlo dipakaiutnuk menganalisa dan mendapatkan indeks keandalan sistem,berikut ini akan diberikan sebuah contoh sederhana tentangperbandingan bagaimana mengevaluasi indeks keandalan sebuahkomponen dengan metode analitis dan simulasi.
Berikut ini beberapa buah contoh permasalahan simulasikeandalan sistem, berikut algoritma untuk menyimulasikan sistemyang terdiri dari dua komponen dengan konfigurasi seri, paralel danstandby. Sedangkan untuk sistem yang lebih kompleks, algoritmasimulasi dapat dikembangkan dari algoritma yang akan dibahasberikut ini.
11.4.1 Algoritma Konfigurasi Seri Untuk Sistem Non-Repairable system
Langkah 1: Generate dua buah random number, yang pertama untukkomponen 1 dan yang kedua unutk komponen kedua.
Langkah 2: Konversi random number menjadi variabel randomwaktu, T, untuk masing-masing komponen.
Langkah3: Jika salah satu waktu ini kurang dari waktu yangdiperlukan untuk menyelesaikan satu misi, hitung event
51
ini sebagai event kegagalan. Sebaliknya, jika keduawaktu ini sama atau lebih besar dari waktu yangdiperlukan untuk menyelesaikan satu misi, hitung eventini sebagai event sukses.
Langkah 4: Ulangi lagkah 1 – 3, jumlahkan semua kegagalan dankesuksesan , dan lanjutkan untuk jumlah simulasi yangdikehendaki.
Langkah 5: Evaluasi reliability sistem sebagai jumlah kesuksesandibagi dengan jumlah simulasi.
11.4.2 Algoritma Konfigurasi Paralel Untuk Sistem Non-Repairable system
Langkah 1: Generate dua buah random number, yang pertama untukkomponen 1 dan yang kedua unutk komponen kedua.
Langkah 2: Konversi random number menjadi variabel randomwaktu, T, untuk masing-masing komponen.
Langkah3: Jika salah satu waktu ini lebih dari waktu yang diperlukanuntuk menyelesaikan satu misi, hitung event ini sebagaievent sukses. Jika kedua waktu ini kurang dari waktuyang diperlukan untuk menyelesaikan satu misi, hitungevent ini sebagai event kegagalan.
Langkah 4: Ulangi lagkah 1 – 3, jumlahkan semua kegagalan dankesuksesan , dan lanjutkan untuk jumlah simulasi yangdikehendaki.
Langkah 5: Evaluasi reliability sistem sebagai jumlah kesuksesandibagi dengan jumlah simulasi.
52
11.4.3 Algoritma Konfigurasi Paralel Repairable System
Langkah 1: Generate sebuah random numberLangkah 2: Konversi random number menjadi variabel random
waktu, T, yang merupakan waktu pengoperasiankomponen
Langkah 3: Generate sebuah random number yang baruLangkah 4: Konversi random number menjadi variabel random
waktu, T, yang merupakan waktu yang diperlukan untukmereparasi komponen
Langkah5: Ulangi langkah 1 – 4 untuk satu periode yang sama ataulebih besar dari waktu yang diperlukan untukmenyelesaikan satu misi
Langkah 6: Ulangi lagkah 1 – 5Langkah 7: Bandingkan urutan dari masing-masing komponen. Jika
selama misinya tidak terjadi reparasi yang overlap, misidari sistem dapat dianggap sebagai sukses. Sebaliknya,jika terjaadi reparasi yang overlap, misi dari sistem dapatdianggap gagal.
Langkah 8: Ulangi langkah 1 – 7 untuk jumlah simulasi yangdiinginkan.
11.4.4 Algoritma Konfigurasi Standby System
Langkah 1: Buat urutan pengoperasian, dalam hal ini time to failure(TTF) dari komponen dipakai sebagai acuan, untukkomponen A. Komponen B akan langsung dioperasikanbila komponen A mengalami kegagalan.
Langkah 2: Buat urutan kedua yang berhubungan dengan waktureparasi (TTR – time to repair) yang dimulai pad saat
53
komponen A mengalami kegagalan. Masing-masingelemen berikutnya dari urutan ini dimulai jika komponenyang sedang beroperasi mengalami kegagalan.
Langkah 3: Jika waktu reparasi TTR dari sebuah komponen lebihbesar dari waktu pengoperasian TTF untuk komponenyang sedang disimulasikan, maaka sistem akanmengalami kegagalan.
Langkah 4: Ulangi lagkah 1 – 3 sampai waktu simulasi total samadengan atau lebih besar dari waktu yang diperlukanuntuk satu misi.
Langkah 5: Ulangi langkah 1 – 4 untuk jumlah simulasi yangdiinginkan.
Untuk sistem yang kompleks algoritma di atas dapat dipakaisebagai referensi untuk taylor-made program.
54
11.5 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. Bridgees, D.C. [1974], The Application of Reliability to the Designof Ships’ Machinery, Transaction IMarE, Vol. 86.
3. Henley, E.J. and Hiromitsu Kumamoto [1992], Probabilistic RiskAssessment : reliability Engineering, Design, and Analysis, IEEEPress, New York.
4. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
5. Press , W.H., Saul A. Teukolsky, William T. Vetterling, and Brian P.Flannery [1992], Numerical Recipes in FORTRAN : The Art ofScientific Computing, 2nd edition, Cambridge University Press, NewYork.
KEMBALI KE DAFTAR ISI MODUL 4
KEANDALAN DAN PERAWATAN
Strategi UntukKebijaksanaan Perawatan
OlehIr. Dwi Priyanta, MSE
JURUSAN TEKNIK SISTEM PERKAPALANFAKULTAS TEKNOLOGI KELAUTANINSTITUT TEKNOLOGI SEPULUH NOPEMEBERSURABAYA
© Copyright ada pada penulis
MODUL5
DAFTAR ISI MODUL 5
BAB 12Strategi Untuk Kebijaksanaan Perawatan12.1 Pendahuluan12.2 Jenis Perawatan12.3 Pemodelan Perawatan Terjadwal Ideal (Ideal Scheduled
Maintenance)12.4 Perbaikan Ideal12.4.1 Kasus Kusus Waktu Antar Kegagalan yang Terdistribusi Secara
Eksponensial12.5 Perbaikan Ideal dan Perawatan Preventif12.6 Ekonomi dari reparasi dan Perawatan12.7 Analisa Ketersediaan12.8 Referensi dan Bibliografi
KEMBALI KE MENU UTAMA
FOR INTERNAL USE ONLY
1
Strategi UntukKebijaksanaan Perawatan
12.1 Pendahuluan
Saat ini peralatan dan plant yang dioperasikan cenderungsemakin kompleks dan membutuhkan modal yang sangat besar baikuntuk investasi awal maupun untuk biaya operasional. Untuk itu,strategi dan kebijaksanaan perawatan sangat diperlukan agar semuaperalatan yang beroperasi di dalam sistem tidak sering mengalamikegagalan dalam pengoperasiannya. Secara tradisional, perawatandipandang sebagai sesuatu yang hanya dipertimbangkan jika telahterjadi sesuatu yang salah pada suatu sistem atau sesuatu yangsalah akan segera terjadi, bila hal ini terjadi maka biasanya fungsiperawatan yang ada tidak terorganisasi dan tidak sistematis.Berbagai upaya untuk mengoptimalkan perawatan, baik bentukmaupun beaya perawatan telah banyak dilakukan yang kesemuanyabertujuan untuk menjaga ketersediaan (availability) sistem. Olehkarena itu, untuk saat ini teknik perawatan lebih banyakdikonsentrasikan pada perawatan pencegahan / preventif untukmenghindari kerusakan yang lebih serius, dan strategi perawatanpencegahan ini juga difokuskan untuk mempertahankan efisiensi dari
2
sistem sedekat mungkin dengan efisiensi maksimum yang sudahdidesain.
Umumnya, regulasi dan policy baik internal maupun eksternalakan menentukan kebijakan perawtan yang berkaitan dengankeselamatan. Sedangkan perawatan yang berkaitan denganketersediaan dan konsumsi energi, optimasi harus dijadikan sebagaibasis penentuan kebijaksanaan perawatan, karena penambahantugas perawatan tidak hanya akan menambah ketersediaan sistemtetapi juga akan menambah beaya perawatan nya. Sehingga tujuandari implementasi perawatan itu hendaknya diharapkan jugamempertimbagkan optimalisasi berbagai faktor yang saling berkaitan.
Perawatan merupakan hal yang sangat mahal dan merupakansuatu godaan yang kuat untuk menundanya sampai esok hari danmenghemat dana untuk hari ini. Ekspresi minimal maintenanceapproach menunjukkan tindakan perawatan terhadap suatu plantyang dilakukan hanya untuk memenuhi persyaratan dan hukum yangtelah ditentukan oleh badan pembuat peraturan. Jika tindakan inidikombinasikan dengan manajemen perawatan yang terabaikan ,maka hal ini akan memperpendek masa berguna (useful life) dariplant dan juga meungkin juga akan menambah beaya lainnya sepertibeaya kerusakan (downtime cost) dan berbagai denda yang timbulakibat dampak yang mungkin ditimbulkan oleh kerusakan sistem.
12.2 Jenis Perawatan
Ada berbagai jenis perawatan yang banyak dilakukan secarapraktis. Jenis – jenis perawatan ini secara skematis dapat dilihat padagambar 12.1 di bawah ini, yang secara umum dibagi menjadi plannedmaintenance (perawatan terencana) dan unplanned maintenance(perawatan tak terencana).
3
Perawatan terencana adalah perawatan yang diorganisir dandilakukan dengan perencanaan dan pengonntrolan yang sudahditentukan terlebih dahulu. Sedangkan perawatan tak terencanaadalah satu jenis perawatan yang dilakukan tanpa perencanaanterlebih dahulu.
Perawatan preventif adalah perawatan yang dilakukan padainterval waktu yang sudah ditentukan – contoh dari strategi iniadalah scheduled maintenance - atau berhubungan dengan kriteriayang sudah ditentukan - contoh dari strategi ini adalah conditionmaintenance .Dengan melakukan perawatan preventif, mengandungmaksud untuk mengurangi probabilitas kegagalan atau penurunanperformance dari suatu sistem.
Perawatan korektif adalah perawatan yang dilakukan setelahperalatan mengalami kegagalan dan perawatan ini dimaksudkanuntuk mengembalikan sistem ke keadaan dimana sistem tersebutdapat melakukan fungsinya kembali. Emergency maintenance adalahsalah satu jenis dari corrective maintenance yang diperlukan untukmemfungsikan kembali peralatan secepatnya agar dampak yang lebihburuk dapat dihindari.
Perawatan preventif dapat dibagi lagi menjadi scheduledmaintenance (perawatan terjadwal) dan condition based maintenance(Perawatan yang berbasis pada kondisi sistem). Perawatan terjadwaldilakukan pada interval waktu tertentu, baik itu banyaknya jam kerja,jumlah siklus yang ytelah dilalui, dan lain – lain. Pemilihan intervalwaktu perawatan untuk satu komponen tertentu terbukti sangat sulit.Bentuk dari perawatan preventif biasanya berupa pengecekan(inspection) terhadap berbagai komponen secara periodik untukmenentukan apakah pengaturan (adjustment) dan penggantian(replacement) sudah diperlukan. Jika interval ini terlalu sering, makapengecekan ini akan mengurangi ketersediaan sistem dan menambahresiko kesalahan re-assembly. Sedangkan pengecekan yang jarangmungkin akan menimbulkan kerusakan sistem yang tidak diinginkan.
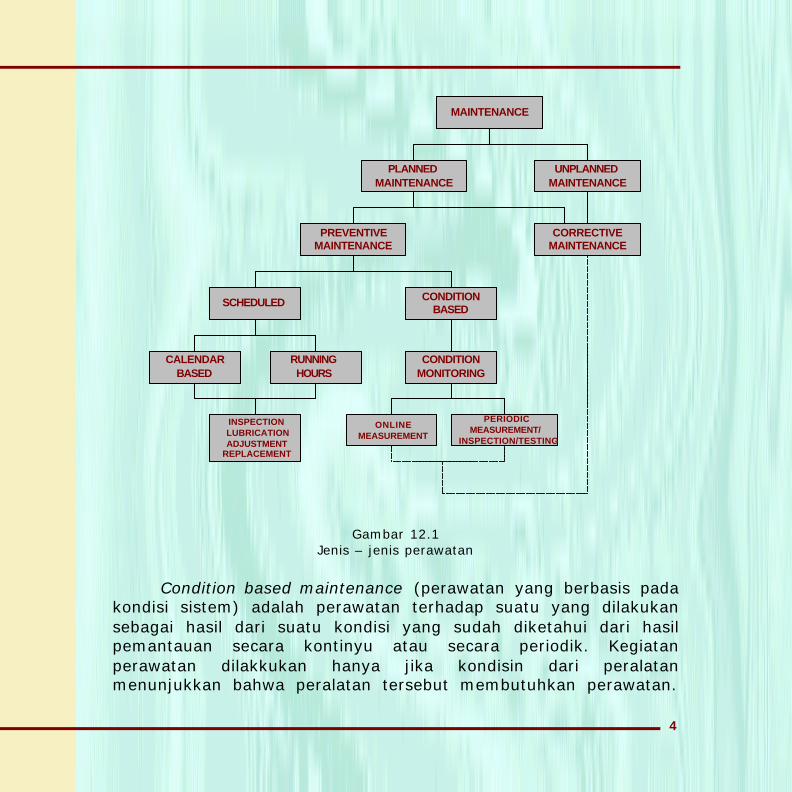
4
MAINTENANCE
PLANNEDMAINTENANCE
UNPLANNEDMAINTENANCE
PREVENTIVEMAINTENANCE
CORRECTIVEMAINTENANCE
SCHEDULED CONDITIONBASED
RUNNINGHOURS
CALENDARBASED
CONDITIONMONITORING
INSPECTIONLUBRICATIONADJUSTMENT
REPLACEMENT
ONLINEMEASUREMENT
PERIODICMEASUREMENT/
INSPECTION/TESTING
Gambar 12.1Jenis – jenis perawatan
Condition based maintenance (perawatan yang berbasis padakondisi sistem) adalah perawatan terhadap suatu yang dilakukansebagai hasil dari suatu kondisi yang sudah diketahui dari hasilpemantauan secara kontinyu atau secara periodik. Kegiatanperawatan dilakkukan hanya jika kondisin dari peralatanmenunjukkan bahwa peralatan tersebut membutuhkan perawatan.
5
Dengan pendekatan ini perawatan hanya dilakkukan bila hal itudiperlukan.
Condition monitoring (pemantauan kondisi) adalah pengukuransecara periodik dan kontinyu dan menginterpretasikan data yangmenunjukkan kondisi dari peralatan dan menentukan apakahperalatan tersebut perlu membutuhkan perawatan atau tidak.Pemanatauan kondisi secara normal dilakukan pada saat peralatansedang beroperasi dan tidak sedang dalam keadaan rusak berat.
Aplikasi dari pengukuran secara kontinyu mungkin bisadibandingkan dengan pemakaian proses sistem alarm. Pada sistemalarm ini parameter operasional yang kritis dimonitor secara terusmenerus dan alarm akan berbunyi bila kondisi tertentu dilampaui.Tujuan dari pemantauan kondisi adalah untuk mengkuantifikasikankondisi suatu peralatan dan tidak begitu saja memberikan peringatanbila batas operasi yang ditentukan telah dicapai.
Pengukuran secara periodik umumnya mempunyai tujuan untukmemberikan proteksi yang cukup dari suatu peralatan terhadapkondisi yang buruk atau kondisi yang perlahan-lahan mengarah keterjadinya suatu kegagalan. Suatu pengukuran mungkin dapatdilakukan pada interval yang lebih pendek bila running hoursperalatan semakin bertambah.
12.3 Pemodelan Perawatan Terjadwal Ideal (Ideal ScheduleMaintenance)
Misalkan sebuah komponen yang tidak mampu rawat tetapikomponen tersebut menjalani perawatan preventive/terjadwal.Perwatan seperti ini dikatakan ideal jika perawatan ini membutuhkanwaktu yang singkat (interval waktu perawatan diamsusikanmendekati /sama dengan nol) untuk menyelesaikannya dan jikakomponen tersebut dikembalikan ke kondisi seperti baru lagi setelah
6
perawatan usai. Meskipun komponen tidak mampu rawat dandibuang pada saat mengalami kegagalan, alasan untuk perawatanterjadwal agar tetap untuk memperpanjang usia komponen danmenunda kegagalannya.
Jika komponen memiliki laju kegagalan konstan maka waktukegagalan komponen (time to failure) memiliki distribusieksponensial. Dengan kata lain probabilitas kegagalan selamapertambahan waktu t∆ berikutnya agar tetap tidak berubah selamausia komponen, hal ini menunjukan bahwa komponen ini tetapsebagus kondisi barunya tanpa tanpa memandang berapa lamakomponen tersebut telah dioperasikan. Pada kasusu seperti iniperawatan preventive menjadi tidak relevan .
Jika komponen memiliki laju kegagalan yang menurun, yangberarti laju kegaglannya semakin membaik seiring bertambahnyawaktu, perawatan yang bertujuan untuk menggembalikan komponenke kondisi seperti baru adalah tidak menguntungkan dan tidakdisarankan.
Perawatan terjadwal akan berharga hanya jika komponenmemiliki laju kegagaln yang semakin meningkat. Sebagian besardidiskusikan pada seksi ini mengamsusikan bahwa komponenmemiliki laju kegagalan yang meningkat dan perawatan dilakukanhanya pada komponen – komponen yang bekerja.
Jika
=)(tTf Failure density function
MT = interval waktu yang tetap diantara 2 perawatan)()(1 tftf T= MTt ≤<0
=)(tR fungsi keandalan komponen
maka density function )(* tfT untuk komponen setelah mengalamiperawatan dapat ditulis sebagai
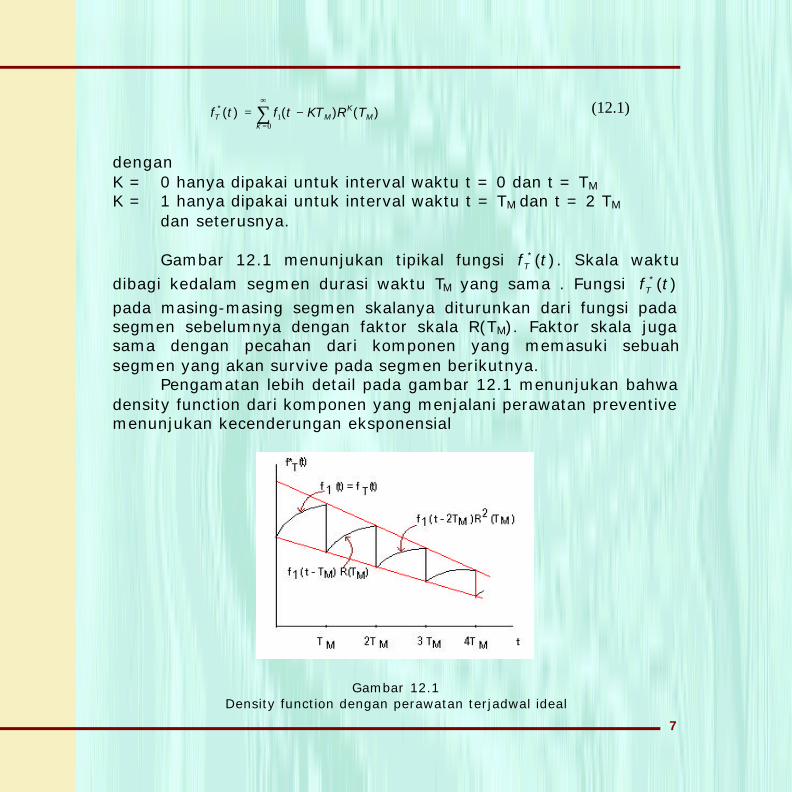
7
∑∞
=−=
01
kM
KMT TRKTtftf )()()(* (12.1)
denganK = 0 hanya dipakai untuk interval waktu t = 0 dan t = TM
K = 1 hanya dipakai untuk interval waktu t = TM dan t = 2 TM
dan seterusnya.
Gambar 12.1 menunjukan tipikal fungsi )(* tfT . Skala waktudibagi kedalam segmen durasi waktu TM yang sama . Fungsi )(* tfT
pada masing-masing segmen skalanya diturunkan dari fungsi padasegmen sebelumnya dengan faktor skala R(TM). Faktor skala jugasama dengan pecahan dari komponen yang memasuki sebuahsegmen yang akan survive pada segmen berikutnya.
Pengamatan lebih detail pada gambar 12.1 menunjukan bahwadensity function dari komponen yang menjalani perawatan preventivemenunjukan kecenderungan eksponensial
Gambar 12.1Density function dengan perawatan terjadwal ideal
8
Dampak terpenting dari perawatan preventive secara periodik adalahdensity fuction dari bentuk aslinya. Perubahan ini merupakan salahsatu dari berbagai justifikasi mengapa distribusi eksponensialdigunakan untuk memodelkan umur hidup komponen
Contoh 12.1
Asumsikan sebuah komponen yang umur hidupnya secara uniformdidefinisikan oleh
25,0)( =tf 40 ≤< t tahunkomponen ini menjalani perawatan secara teratur (asumsikansebagai perawatan ideal) sekali setahun. Tentukan modifikasi densityfunction jika perawatan dilaksanakan.
Solusi
§ Cumulative distribution function
∫ ==t
tdttftF0
250,)()( untuk 40 ≤< t
§ Fungsi keandalan
ttR
tFdttftR
25,01)(
)(1)()(
0−=
−== ∫∞
untuk 40 ≤< t
§ laju kegagalan
ttRtf
t2501
0250,
,)()(
)(−
==λ
§ MTTF komponen tanpa perawatan
9
MTTF = ∫ =4
02)( dttR Tahun
§ Jika perawatan terjadwal TM, adalah 1 th, makaR(TM) = R(1) = 0,75
§ Dengan menggunakan persamaan 12.1
∑∞
=
=0
750250K
KT tf ),)(,()(*
§ Rata – rata laju kegagalan ( )(* tλ )
28770
34
44
2501250
441
1
0
1
0
1
0
1
0
,lnln
)ln(
,,
)()(*
=−=
−−=−
=
−==
∫
∫ ∫
tt
dt
dtt
dttt λλ
§ Perawatan periodik telah menggantikan density function f(t)dengan density function yang memiliki tendensi eksponensial.Berdasarkan aproksimasi eksponensial, MTTF dari komponenadalah
MTTF = 476.32877,01 ≈ tahun
§ Sedangkan nilai eksak dari MTTF dengan memasukan faktorperawatan adalah
10
tahun
K
dtttfMTTF
K
K
T
5,3
)12()75,0(81
)(
0
0
**
=
+=
=
∑
∫
∞
=
∞
12.4 Perbaikan Ideal
Perbaikan ideal (ideal repair) memiliki 2 kondisi yang harusdipenuhi :1. Durasi perbaikan setelah masing-masing kegagalan adalah sangat
pendek dibandingkan dengan waktu diantara dua kegagalansehingga dapat diasumsikan sama dengan nol.
2. Setelah diperbaiki, komponen dikembalikan pada kondisi sepertibaru.
Contoh yang bagus dari perbaikan ideal adalah penggantiankomponen yang gagal dengan proses penggantiannya memerlukanwaktu yang sangat singkat. Ada perbedaan fundamental antaraperbikan ideal dan perawatan terjadwal. Perawatan terjadwal idealdilakukan pada interval waktu yang sudah ditentukan dimanakomponen masih dalam kondisi tidak rusak (bekerja) sedangkanperbaikan ideal selalu dilakukan setelah terjadi kegagalan, dan waktukegagalannya tidak ditentukan (random).
Mengamsusikan umur hidup komponen T merupakan variabelrandom yang kontinu dengan density function
11
[ ]ttTtPt
tftT ∆+≤<
∆=
→∆(lim)(
10
(12.2)
jelas terlihat bahwa density function f1(t) untuk random variabel yangmewakili kegagalan pertama adalah )(tfT . Pertanyaan yang harusdijawab adalah, apakah bentuk density function )(tf 2 untuk randomvariabel kontinyu untuk kegagalan kedua ?
Asumsikan bahwa kegagalan pertama terjadi disekitar waktu τ.Maka probabilitas untuk kegagalan kedua dalam interval waktu(t,t+∆t), t>τ, untuk τ tertentu adalah
[ ] [ ]ttfttf ∆∆−∆≈∆ )(f )()( 1 τττ12 (12.3)
karena durasi dari umur hidup (lifetime) kedua adalah t – τ.Dengan mempertimbangkan semua nilai – nilai yang mungkin
dari τ yang kurang t, kita akan memperoleh
2 1 10
( ) ( ) ( )t
f t f f t dτ τ τ= −∫ (12.4)
Argumen yang sama mengarahkan kita ke density function untukvariabel random kontinyu yag menunjukkan kegagalan ke-k, yaitu
1 10
( ) ( ) ( ) untuk 2t
k kf t f f t d kτ τ τ−= − ≥∫ (12.5)
pada saat mempertimbangkan semua kegagalan – kegagalanpertama, kedua, ketiga, dan seterusnya – probabilitas darisembarang kegagalan yang terjadi pada interval (t,t+∆t) merupakanpenjumlahan probabilitas dari kegagalan pertama, kedua, ketiga, danseterusnya yang terjadi pada interval waktu yang telah
12
dipertimbangkan. Jika L(t) menyatakan density function darisembarang kegagalan yang terjadi pada perbaikan ideal, maka
L(t) ∆t = probabilitas beberapa kegagalan yang terjadi padainterval (t,t+∆t)
1
1( ) [sembarang kegagalan pada (t,t+ t)]
0
= ( )kk
limL t P
t t
f t∞
=
= ∆∆ → ∆
∑(12.5)
atau
∑∫∞
=− −+=
2 0111
k
t
k dtfftftL τττ )()()()( (12.6)
12.4.1 Kasus Kusus Waktu Antar Kegagalan yang Terdistribusi Secara Eksponensial
Jika waktu antar kegagalan terdistribusi secara eksponensial,maka fk(t) menjadi distribusi khusus Erlangian, yang merupakandistribusi Gamma dengan nilai β yang bulat. Penurunan distribusi ituadalah sebagai berikut
tT etftf λλ −== )()(1 (12.7)
tt
t tedetf λτλ λτλ −−− == ∫ 2
02
)(()( (12.8)
13
∫ −−−− =t
tt et
deetf0
232
3 2λτλλτ λτλτλ )()()( (12.9)
Pattern dari persamaan – persamaan ini dapat ditulis dalam bentukumum, yaitu
tk
kk e
kt
tf λλ −−
−=
)!()(
1
1
(12.10)
Fungsi densitas probabilitas L(t) bagi sembarang kegagalan yangterjadi pada perbaikan ideal untuk kasus ini dapat ditulis sebagai
λλλλ λλλ ==−
== ∑ ∑∞
=
∞
=
−−
−
1 1
1
1k k
ttk
tk ee
kt
etftL)!(
)()()()( (12.11)
Contoh 12.2
Kembali pada contoh 12.1, jika perbaikan ideal pada komponenmasing – masing dilakukan pada masing – masing kegagalan,tentukan fungsi densitas kegagalan komopnen tersebut.
Solusi
Fungsi densitas untuk masing – masing kegagalan adalah
2501 ,)()( == tftf T
tdtft
241
02 250250 )(),)(,()( == ∫ τ
14
∫ ==t
tdtf0
23
41
412
41
3
2
)()()()()( ττ
Bentuk umum dari fk(t) dapat disimpulkan dari pattern persamaan –persamaan di atas yaitu
−
=
−
)!()(
141 1
kt
tfkk
k
Oleh karena itu
∞
=
−∞
=
=−
== ∑∑ 4
1
14
1
25014
1t
k
kt
kk e
ktftL ,
)!()(
)()(
12.5 Perbaikan Ideal dan Perawatan Preventif
Dari berbagai uraian sebelumnya terlihat bahwa, bagi sebuahkomponen yang memiliki fungsi laju kegagalan yang semakinmeningkat, perawatan preventif secara periodik akan meningkatkanMTTF dan sebagai hasilnya fungsi densitas kegagalan (failure densityfunction) dari komponen tersebut akan memilimi kecenderunganeksponensial. Jika kemungkinan perawatan ideal dimasukkan dalamanalisa, maka hasil yang diperoleh adalah berkurangnya frekuensiperawatan. Dengan mengasumsikan perawatan ideal pada intervalperiodik TM, frekuensi perbaikan fR akan sama dengan rata – ratadensitas kegagalan pada durasi waktu TM, yaitu
15
∫=MT
MR dttL
Tf
0
1)( (4.12)
Dimana L(t) diberikan oleh persamaan (12.6). Jika frekuensiperawatan bertambah panjang maka TM dan fR akan berkurang.Dengan kata lain, MTTF efektif yang merupakan kebalikan dari fRakan bertambah.
Contoh 12.3
Jika komponen pada contoh 12.1 dan 12.2 menjalani perawatanpreventif tiap interval waktu TM dan juga dikenakan perbaikan ideal,tentukan frekuensi perbaikan dai komponen tersebut.
Solusi
Frekuensi perawatan
−=== ∫∫ 1
1250
11 4
0
4
0
MMM T
M
T t
M
T
MR e
Tdte
TdttL
Tf ,)(
Jika TM = 1 tahun , maka
tahunper ,2840141
=−= efR
16
12.6 Ekonomi Dari Reparasi Dan Perawatan
Kita lihat pada pemebahasan terdahulu, bahwa perawatanpreventif secara periodik akan menambah MTTF dari komponen yangmemiliki fungsi laju kegagalan yang semakin meningkat. Perawatanpreventif juga mengurangi frekuensi reparasi baki komponen yangmampu-rawat (repairable). Penambahan frekuensi perawatan (sebagai dampaknya, akan mengurangi waktu antara dua perawatan )lebih lanjut akan mengurangi frekuensi reparasi. Yang menjadipermasalahan sekarang adalah, berapa waktu optimum diantara duaperawatan ? Jawabannya tergantung pada beaya relatif dari reparasidan pemeliharaan.
UmpamakanCR = Nilai reparasiCM = Nilai satu perawatan.
Jika CR dan CM nilainya kira-kira hampir sama, maka pelaksanaanperawatan akan menjadi tidak ekonomis. Untungnya, dalam banyakhal CM << CR, dan pelaksanaan perawatan dapat ditentukan bagikomponen dengan fungsi laju kegagalan yang semakin meningkat.Harga total perunit waktu untu perbaikan dan perawatan adalah
MfMCRfRCK += (12.13)
dimana=Rf frekuensi reparasi
dan=Mf frekuensi perawatan =1/TM
Untuk mendapatkan harga yang optimum dari TM, definisikanKo = K/CR sebagai fungsi dari TM dan dapatkan harga TM yangmeminimumkan Ko. Jadi
17
MfR
CM
C
RfR
CK
K +==0 (12.14)
Dengan menggunakan persamaan (4.12), maka persamaan (12.14)akan berubah menjadi
+= ∫
MT
MR
M
M
fCC
dttLT
K0
0
1)( (12.15)
atay
+= ∫
MT
MR
MM f
CC
dttLKT0
0 )( (12.16)
Dengan mendiferensialkan persamaan (12.16) terhadap TM, maka
)( MM
M TLdTdK
TK =+ 00 (12.17)
dimana
KoMTMTL
MTMdTdKo 11 −= )( (12.18)
Dengan menyamakan MdTdKo / sama dengan nol dan
mensubsitusikan Ko dari persamaan (12.15)., kita akan peroleh
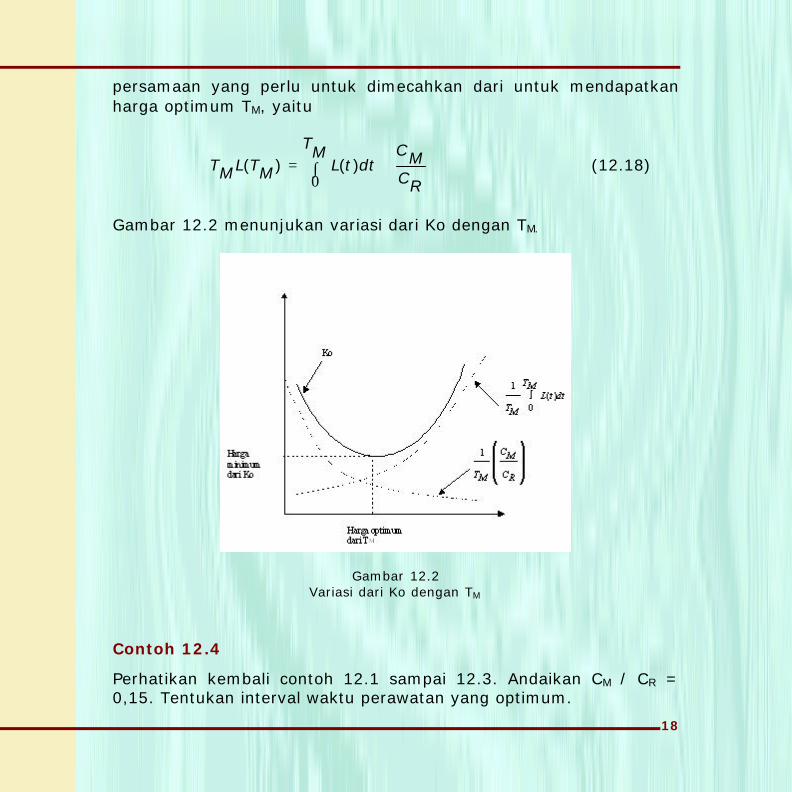
18
persamaan yang perlu untuk dimecahkan dari untuk mendapatkanharga optimum TM, yaitu
∫ +=MT
RCMC
dttLMTLMT0
)()( (12.18)
Gambar 12.2 menunjukan variasi dari Ko dengan TM.
Gambar 12.2Variasi dari Ko dengan TM
Contoh 12.4
Perhatikan kembali contoh 12.1 sampai 12.3. Andaikan CM / CR =0,15. Tentukan interval waktu perawatan yang optimum.
19
Solusi
Dengan menggunakan persamaan (12.15) dan (12.18) untuk0<TM≤4, maka akan kita peroleh
[ ] 85025014 ,, =− M
T
TeM
dengan menyelesaikan persamaan ini, interval waktu optimum akandiperoleh interval waktu optimum untuk berbagai kondisi yang sudahditetapkan yaitu selama 1,869 tahun. Jadi bila perawatan dilakukanpada interval waktu 1,869 tahun akan meminimalkan beayaperawatan total dan prebaikan. Secara praktis, anhka ini akandibulatkan menjadi dua tahun.
12.7 Analisa Ketersediaan
Produktivitas dari sebuah plant diukur oleh kombinasi bebagaiindeks yang dipengaruhi oleh besarnya, frekuensi dan durasi dariwaktu out of service, maupun beayanya. Analisa rekayasaketersediaan (availability engineering analysis) adalah sebuahmetodologi yang dapat membantu para insiyur dalam memperbaikiproduktivitas dari sebuah plant. Jenis analisa ini selalu memasukanperbandingan harga ketersediaan dan harga keuntungan penjualan.Penyelesaian untuk optimasi produktivitas plant direkomendasikanberdasarkan pada hasil analisis ketersediaan
MTTR dari komponen adalah ukuran kemampu-rawatan darisebuah komponen, dan MTTF adalah ukuran dari keandalankomponen. Sering kita menghadapi masalah perbandingan antarakeandalan dan kemampurawatanan untuk meminimalkan beayasecara keseluruhan. Analisa ketersediaan menawarkan sebuah
20
metodologi untuk meminimkan harga ini, sebagai tambahan daripemenuhan seluruh spesifikasi yang telah ditetapkan.
Misalkan sebuah komponen yang mampu-rawat dengan lajukegagalan dan laju perbaikan masing – masing λ dan µ. Daripembahasan sebelumnya kita mempunyai
λ1=MTTF (12.19)
µ1=MTTR (12.20)
dan
µλµ+
=+
==MTTRMTTF
MTTFA tyAvailabili (12.21)
Denngan mengekspresikan MTTR sebagai fungsi dari MTTF dan A,kita akan mempunyai
MTTFA
AMTTR
−= 1
(12.22)
Untuk masing- masing harga dari A, plot dari MTTR lawan MTTF akanberupa garis lurus dengan kemiringan (1 – A)/A, seperti yangdiilustrasikan dalam gambar 12.3.
Berikut ini faktor – faktor tipikal yang akan ditentukan :1. Level minimum ketersediaan yang diperlukan2. MTTF minimum yang diperlukan3. MTTR maksimum yang diijinkan
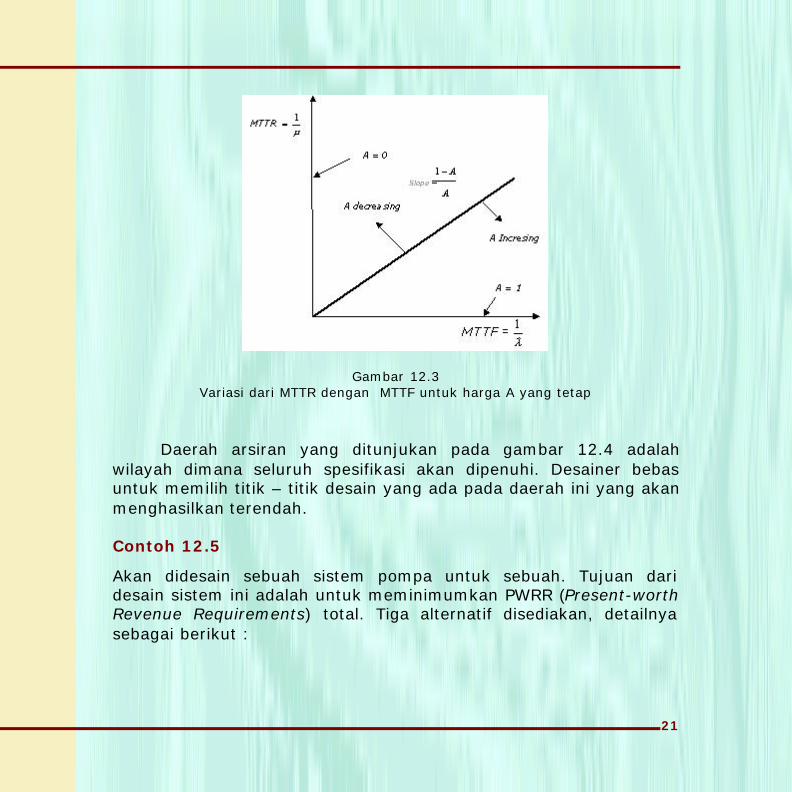
21
Gambar 12.3Variasi dari MTTR dengan MTTF untuk harga A yang tetap
Daerah arsiran yang ditunjukan pada gambar 12.4 adalahwilayah dimana seluruh spesifikasi akan dipenuhi. Desainer bebasuntuk memilih titik – titik desain yang ada pada daerah ini yang akanmenghasilkan terendah.
Contoh 12.5
Akan didesain sebuah sistem pompa untuk sebuah. Tujuan daridesain sistem ini adalah untuk meminimumkan PWRR (Present-worthRevenue Requirements) total. Tiga alternatif disediakan, detailnyasebagai berikut :
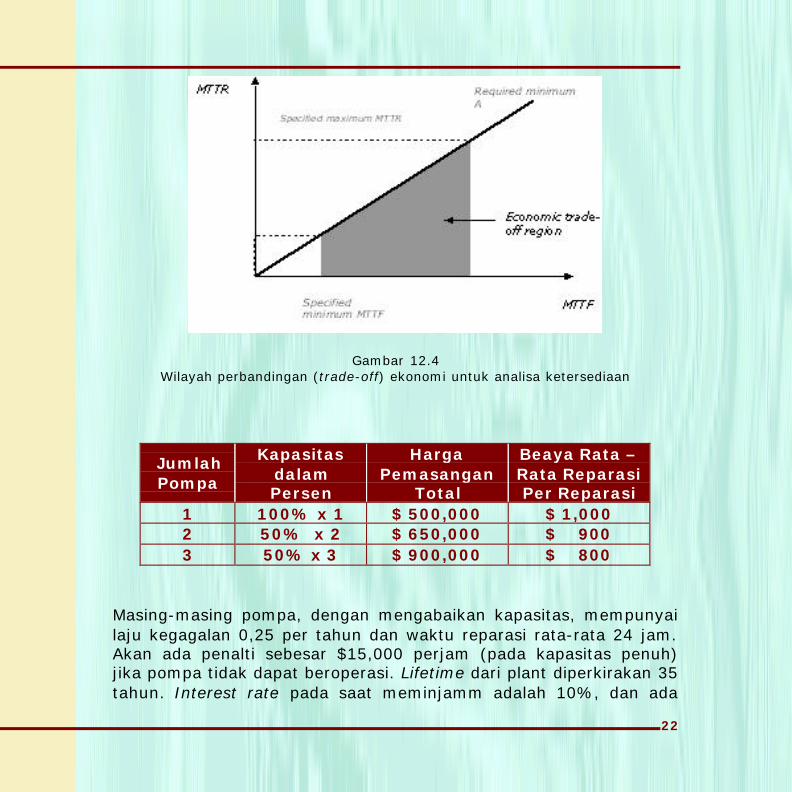
22
Gambar 12.4Wilayah perbandingan (trade-off) ekonomi untuk analisa ketersediaan
JumlahPompa
KapasitasdalamPersen
HargaPemasangan
Total
Beaya Rata –Rata ReparasiPer Reparasi
1 100% x 1 $ 500,000 $ 1,0002 50% x 2 $ 650,000 $ 9003 50% x 3 $ 900,000 $ 800
Masing-masing pompa, dengan mengabaikan kapasitas, mempunyailaju kegagalan 0,25 per tahun dan waktu reparasi rata-rata 24 jam.Akan ada penalti sebesar $15,000 perjam (pada kapasitas penuh)jika pompa tidak dapat beroperasi. Lifetime dari plant diperkirakan 35tahun. Interest rate pada saat meminjamm adalah 10%, dan ada
23
pembayaran tahunan tambahan sebesar 15% untuk pengembalianmodal yang telah dipinjam, biaya operasi dan perawatan. TentukanPWRR bagi masing – masing skenario desain sistem.
Solusi
Untuk masing-masing pompa
425011 ===,λ
MTTF tahun
24=MMTR jam = 760824,
tahun
dan
Availability = 0643504035
760824
4
4,,
,
=+
Oleh karena ituA = 0,9993155
dan
U = 0,0006845
Dengan mencicil pembayaran n tahun, EPWF (Effective Present-WorthFactor) untuk tarif r per unit adalah
nrr
nrEPWF
)(
)(
+−+
=1
111
24
Untuk r = 0,1 dan n = 35, maka
EPWF = 9.644
Alternatif 1
Jumlah jam yang tidak berfungsi per tahun adalah= (0.00068445)(8.760) = 6 jam
Jika pompa tidak beroperasi / berfungsi maka sistem 100% tidakberfungsi maka kapasitas plant juga akan berkurang 100%.
Beaya tahunan yang harus dikeluarkan tiap tahunnya akibat planttidak berfungsi adalah
= 6 x $ 15,000 = $90,000.
Oleh karena itu
6715931
0001250000900005001506449
..$).)(,(.).)(,)[(,$(
coscoscosarg)(
=++=
+
+
=
trepairannual
toutageannual
tinstalledtotal
rateech
annualEPWFPWRR
Alternatif 2
Dengan dua pompa yang identik, ada tiga kemungkinan yangdipertimbangkan :i. Kedua pompa bekerja. Maka tidak ada pengurangan dalam
kapasitas dan tidak ada penalti.
25
ii. Satu pompa up dan satu down. Maka pengurangan 50% dalammenghasilkan kapasitas dan probability dari bagian ini adalah
= 2AU = 0.00136806iii. Kedua pompa down. Maka ada pengurangan 100% dalam
kapasitas, dan probabilitas pada bagian ini adalah= U2 = 469 x 10-9
Beaya tahunan yang harus dikeluarkan tiap tahunnya akibat planttidak berfungsi adalah
[ ] 943897608104690100368400015
76081104692
00136806000015
66
9
,$),(..),$(
),(.
),$(
=+=
+=
−−
−
xx
xx
PWRR = (9.644)[(0.15)(650,000) + 89,943 + 2(0.25)(900)] = $ 1,812,040
Alternatif 3
Dengan tiga pompa yang identik, ada empat kemungkinan yangdipertimbangkan :i. Ketiga pompa bekerja seluruhnya. Maka tidak ada pengurangan
kapasitasii. Hanya dua pompa bekerja. Maka, tetap tidak pengurangan
kapasitasiii. Hanya satu pompa yang bekerja. Maka ada pengurangan 50%
kapasitas, dan probabilitas untuk keadaan ini adalah= 3AU2 = 1.405 x 10-6
iv. Seluruh pompa down. Maka ada pengurangan 100% kapasitasdan probabilitas pada keadaan ini adaalh
= U3 = 0.3207158 x 10-9
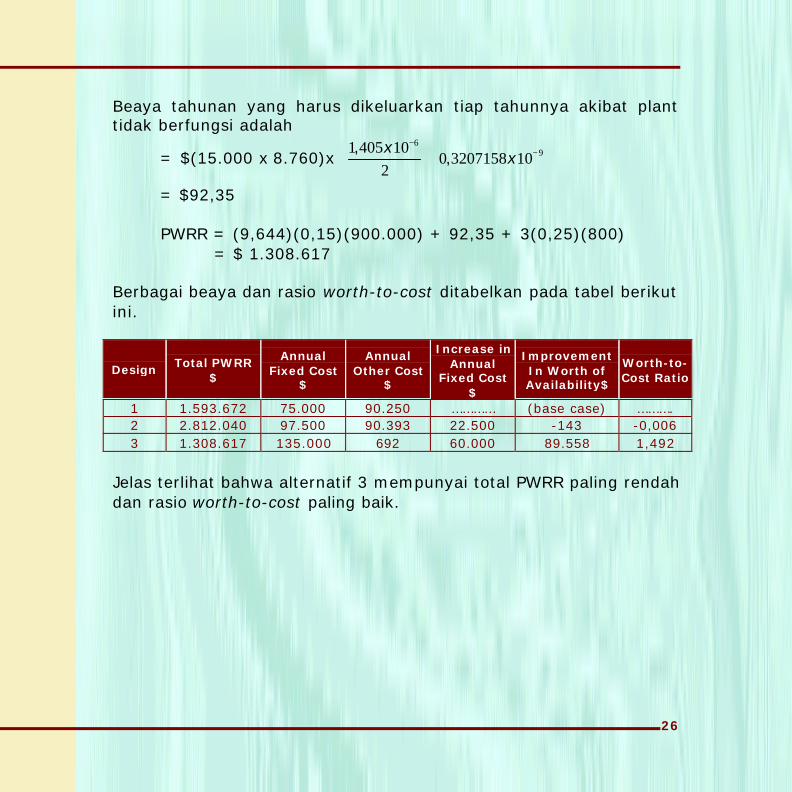
26
Beaya tahunan yang harus dikeluarkan tiap tahunnya akibat planttidak berfungsi adalah
=
+ −
−9
6
10320715802
104051x
x,
, 8.760)x x $(15.000
= $92,35
PWRR = (9,644)(0,15)(900.000) + 92,35 + 3(0,25)(800) = $ 1.308.617
Berbagai beaya dan rasio worth-to-cost ditabelkan pada tabel berikutini.
DesignTotal PWRR
$
AnnualFixed Cost
$
AnnualOther Cost
$
Increase inAnnual
Fixed Cost$
ImprovementIn Worth ofAvailability$
Worth-to-Cost Ratio
1 1.593.672 75.000 90.250 ………… (base case) ……….2 2.812.040 97.500 90.393 22.500 -143 -0,0063 1.308.617 135.000 692 60.000 89.558 1,492
Jelas terlihat bahwa alternatif 3 mempunyai total PWRR paling rendahdan rasio worth-to-cost paling baik.
27
12.8 Referensi dan Bibliografi
1. Billinton, R. and Ronald N. Allan [1992], Reliability Evaluation ofEngineering Systems: Concepts and Techniques, 2nd edition,Plenum Press, New York and London
2. Henley, E.J. and Hiromitsu Kumamoto [1992], Probabilistic RiskAssessment : reliability Engineering, Design, and Analysis, IEEEPress, New York.
3. H∅yland, Arnljot and Marvin Rausand [1994], System ReliabilityTheory Models And Statistical Methods, John Willey & Sons, Inc.
4. Ramakumar, R [1993]., Engineering Reliability : Fundamentalsand Applications, Prentice Hall, Inc. Englewood Cliffs, New Jersey07632.
KEMBALI KE DAFTAR ISI MODUL 5







