
1
DESAIN DAN PROTOTIPE ALAT PEMINDAH BARANG
BERDASARKAN WARNA MENGGUNAKAN MIKROKONTROLER
ATMEGA32*)
Kiki Ayu Winarni**)
, M. Muslim, S.Pd.,M.Si.***)
Jurusan Pendidikan Fisika
Fakultas Keguruan dan Ilmu Pendidikan
Universitas Sriwijaya
Jln. Raya Palembang-Prabumulih, Inderalaya. Ogan Ilir, 30662 Telp. (0711) 580058, 580085. Fax. (0711) 580058
Email: [email protected]
ABSTRAK
Prototipe alat pemindah barang berdasarkan warna menggunakan mikrokontroler
ATMega32 telah berhasil dibuat dan dapat bekerja dengan presentase keberhasilan
88,67%. Prototipe alat pemindah barang ini dibuat menggunakan data input berupa warna yang diperoleh menggunakan sensor warna dengan memanfaatkan prinsip kerja
dari photodiode. Selanjutnya warna tersebut akan dijadikan sebagai input Fuzzy Logic.
Output dari Fuzzy Logic PWM (Pulse Width Modulation) sebagai penentu putaran servo untuk memindahkan barang sesuai data warna.
Kata Kunci: ATMega32, sensor warna, photodiode, fuzzy logic, servo.
PENDAHULUAN
Perkembangan bahan semikonduktor semakin pesat. Pada abad ke 20 ini
penemuan semikonduktor telah membawa manusia ke jaman paling modern yang
tidak pernah terbayangkan oleh manusia dulunya. Saat ini semua alat yang dipakai
oleh manusia tidak lepas dari semikonduktor. Aplikasinya banyak kita lihat pada
peralatan elektronika. Sehingga dunia pendidikan haruslah mampu mengimbangi
perkembangan bahan semikonduktor untuk memanfaatkannya menciptakan alat-
alat yang bergerak otonom. Hal ini dapat dilakukan dengan menggabungkan ilmu
sains fisika dengan ilmu komputer.
Salah satu bentuk alat yang bergerak otonom yang dirancang dengan
memanfaatkan ilmu sains fisika dan ilmu komputer adalah alat penyeleksi dan
pemindah barang yang telah diteliti oleh Indrayanto, dkk (2011). Alat ini
dirancang dan diimplementasikan menggunakan mikrokontroler ATMEL
90S8515 dengan sensor berupa infrared dan limit switch. Alat ini bekerja dengan
memindahkan barang ke suatu tempat yang telah ditentukan berdasarkan tinggi
benda tersebut.
Sehingga dalam tugas ini, penulis juga mencoba untuk mendesain dan
membuat prototipe alat pemindah barang berdasarkan warna menggunakan
ATMega32. Alat ini didesain agar dapat memindahkan barang sesuai warnanya
dengan panjang gelombang tertentu. Alat ini, dilengkapi dengan sensor warna
menggunakan photodiode dan untuk sistem kendali digunakan mikrokontroler
ATMega32. Prototipe alat pemindah barang berdasarkan warna ini didesain
*) Telah diseminarkan pada seminar fisika tanggal 12 Februari 2014
**) Mahasiswa Pendidikan Fisika FKIP Universitas Sriwijaya
***) Dosen Pembimbing Pendidikan Fisika FKIP Universitas Sriwijaya
2
sebagai salah satu aplikasi dari pembelajaran elektronika yang dapat dimanfaatkan
dalam bidang pendidikan untuk megeksplorasi pengetahuan ilmu sains fisika dan
ilmu komputer dan bila dikembangkan lagi dapat bermanfaat di bidang industri.
Sensor Warna
Sensor yang digunakan adalah sensor warna yang menggunakan
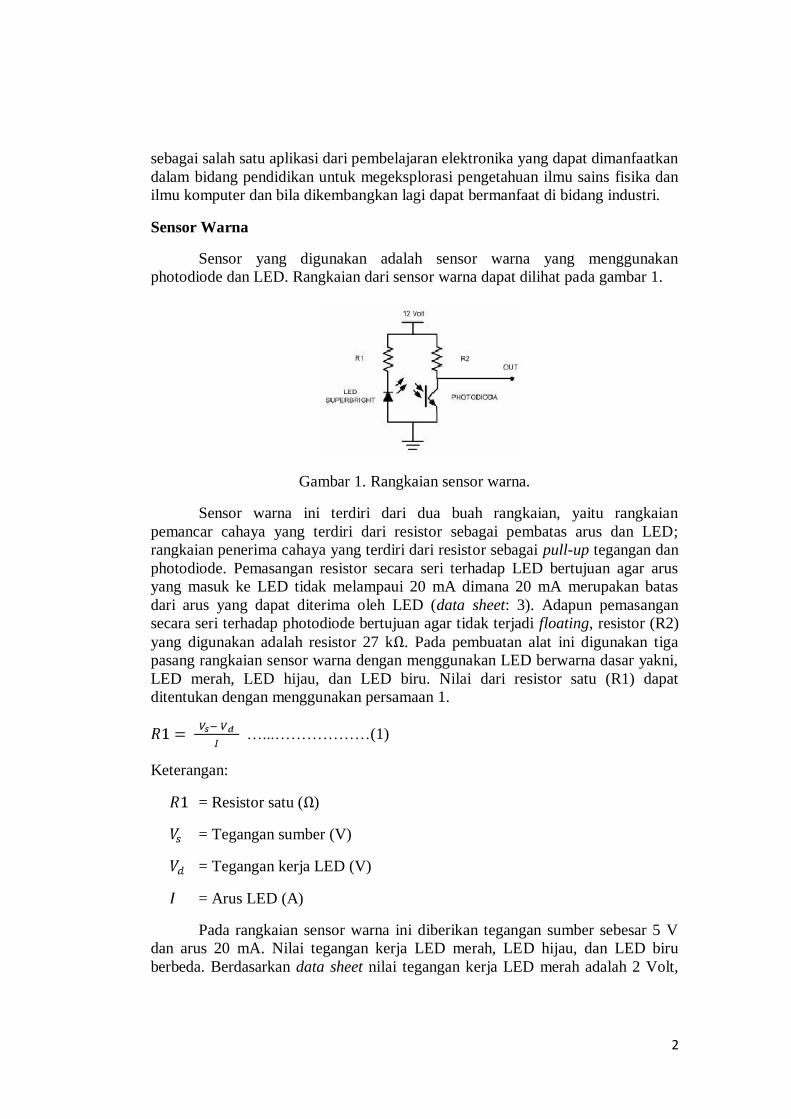
photodiode dan LED. Rangkaian dari sensor warna dapat dilihat pada gambar 1.
Gambar 1. Rangkaian sensor warna.
Sensor warna ini terdiri dari dua buah rangkaian, yaitu rangkaian
pemancar cahaya yang terdiri dari resistor sebagai pembatas arus dan LED;
rangkaian penerima cahaya yang terdiri dari resistor sebagai pull-up tegangan dan
photodiode. Pemasangan resistor secara seri terhadap LED bertujuan agar arus
yang masuk ke LED tidak melampaui 20 mA dimana 20 mA merupakan batas
dari arus yang dapat diterima oleh LED (data sheet: 3). Adapun pemasangan
secara seri terhadap photodiode bertujuan agar tidak terjadi floating, resistor (R2)
yang digunakan adalah resistor 27 kΩ. Pada pembuatan alat ini digunakan tiga
pasang rangkaian sensor warna dengan menggunakan LED berwarna dasar yakni,
LED merah, LED hijau, dan LED biru. Nilai dari resistor satu (R1) dapat
ditentukan dengan menggunakan persamaan 1.
…...………………(1)
Keterangan:
= Resistor satu (Ω)
= Tegangan sumber (V)
= Tegangan kerja LED (V)
= Arus LED (A)
Pada rangkaian sensor warna ini diberikan tegangan sumber sebesar 5 V
dan arus 20 mA. Nilai tegangan kerja LED merah, LED hijau, dan LED biru
berbeda. Berdasarkan data sheet nilai tegangan kerja LED merah adalah 2 Volt,

3
tegangan kerja LED hijau dan LED biru adalah 2,8 Volt. Sehingga nilai R1 pada
masing-masing pasang rangkaian dapat ditentukan sebagai berikut:
Nilai R1 yang dirangkai seri dengan LED merah
Nilai R1 yang dirangkai seri dengan LED hijau
Nilai R1 yang dirangkai seri dengan LED hijau
Rangkaian sensor warna ini akan mendeteksi warna sesuai dengan panjang
gelombang warna tertentu.
Mikrokontroler ATMega32
AVR ATMega32 merupakan sebuah mikrokontroler low power CMOS 8
bit berdasarkan arsitektur AVR RISC. Arisitektur AVR ini menggabungkan
perintah secara efektif dengan 32 register umum. Semua register tersebut
langsung terhubung dengan Arithmatic Logic Unit (ALU) yang memungkinkan 2
register terpisah diproses dengan satu perintah tunggal dalam satu clock cycle. Hal
ini menghasilkan code yang efektif dan kecepatan prosesnya 10 kali lebih cepat
dari pada mikrokontroler CISC biasa.
Motor Servo
Servo merupakan suatu alat yang digunakan untuk menghasilkan output
yang sesuai dengan perintah yang diinginkan dengan menggunakan feedback
(umpan balik). Servo ini terdiri dari motor dc, rangkaian gear, potensio meter dan
rangkaian kontrol. Untuk mengoperasikannya yaitu dengan memberikan pulsa
digital tertentu pada motor ini. Pada dasarnya penggunaan servo itu menggunakan
cara yang sama (yaitu dengan memberikan lebar pulsa tertentu) hanya salah satu
perbedaanya yaitu pada sudut putarnya. Untuk servo standard, sudut putarnya
adalah 180 derajat yang dapat dioperasikan dalam dua arah (clock wise/ counter
clock wise).
Perancangan Alat
Diagram blok pada perancangan Prototipe Lengan Alat dapat dilihat pada
gambar 2.

4
Gambar 2. Diagram Blok Prototipe Lengan Alat.
Dari gambar tersebut terdapat 3 bagian penting dalam Prototipe Lengan
Alat yakni mikrokontroler, sensor dan servo.
1. Sistem Minimum Mikrokontroler ATMega32, untuk mendapatkan nilai
ADC dari sensor warna sehingga dapat terdeteksi warna merah, biru, dan
hijau. Mikrokontroler ATMega32 ini juga berfungsi untuk mengatur
putaran servo dengan sistem fuzzy logic.
2. Sensor warna yang menggunakan photodiode dan LED.
3. Servo
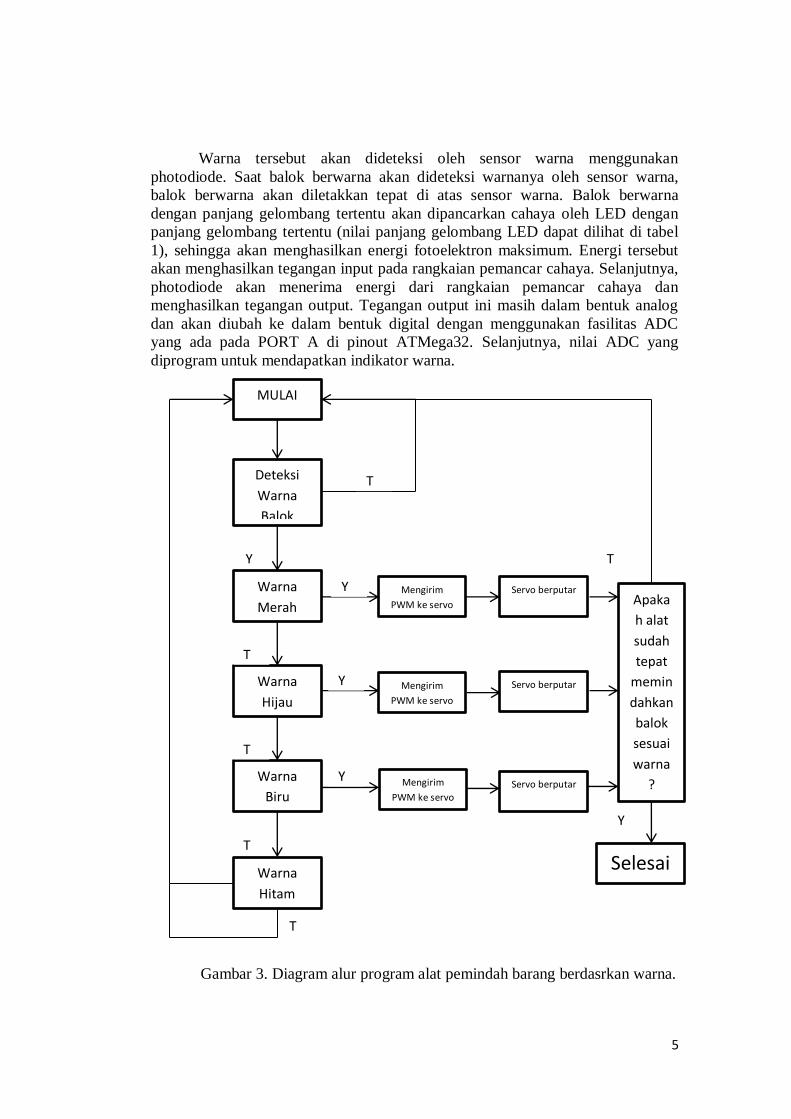
Perancangan perangkat lunak dari alat pemindah barang berdasarkan
warna ini meliputi pendeteksian warna dan pengiriman PWM ke servo untuk
menghasilkan putaran servo tertentu dalam memindahkan barang berdasarkan
warna. Diagram alur dari program yang akan dibuat dapat dilihat pada gambar 3.
Prinsip Kerja Alat
Sistem dari pemindahan barang berdasarkan warna menggunakan
ATMega32 ini diharpakan bekerja sesuai dengan dua tahap:
1. Tahap Pertama
Pada tahap pertama pembuatan prototipe alat pemindah barang
berdasarkan warna ini, sistem akan mendeteksi warna merah dengan panjang
gelombang (625 – 740) nm, warna hijau dengan panjang gelombang (520 – 565)
nm, dan warna biru dengan panjang gelombang (450 – 495) nm.
input
output
ADC Warna
Terdeteksi
Putaran
Servo
Sistem Minimum
ATMega32
Sensor
Warna
Servo
PWM
M
5
Warna tersebut akan dideteksi oleh sensor warna menggunakan
photodiode. Saat balok berwarna akan dideteksi warnanya oleh sensor warna,
balok berwarna akan diletakkan tepat di atas sensor warna. Balok berwarna
dengan panjang gelombang tertentu akan dipancarkan cahaya oleh LED dengan
panjang gelombang tertentu (nilai panjang gelombang LED dapat dilihat di tabel
1), sehingga akan menghasilkan energi fotoelektron maksimum. Energi tersebut
akan menghasilkan tegangan input pada rangkaian pemancar cahaya. Selanjutnya,
photodiode akan menerima energi dari rangkaian pemancar cahaya dan
menghasilkan tegangan output. Tegangan output ini masih dalam bentuk analog
dan akan diubah ke dalam bentuk digital dengan menggunakan fasilitas ADC
yang ada pada PORT A di pinout ATMega32. Selanjutnya, nilai ADC yang
diprogram untuk mendapatkan indikator warna.
Gambar 3. Diagram alur program alat pemindah barang berdasrkan warna.
Selesai
Servo berputar
Servo berputar
MULAI
Deteksi
Warna
Balok
Warna
Merah
Warna
Hijau
Warna
Biru
Warna
Hitam
Mengirim
PWM ke servo
Mengirim
PWM ke servo
Mengirim
PWM ke servo
T
Y
Y
T
T
Y
T
Y
T
Servo berputar Apaka
h alat
sudah
tepat
memin
dahkan
balok
sesuai
warna
?
T
Y

6
Tabel 1. Panjang gelombang LED.
LED Panjang Gelombang (nm)
Merah 630
Hijau 525
Biru 470
Sumber: data sheet 5 mm standard oval LEDs AVAGO Technologies
o Penentuan perintah deteksi warna merah
Diketahui:
λ = 630 nm = 6,3 × 10-7
m
λ0 = (625 – 740) nm = (6,25 × 10-7
– 7,4 × 10-7
) m
Frekuensi LED merah adalah:
Frekuensi ambang warna merah pada λ0 = adalah:
Frekuensi ambang warna merah pada λ0 = adalah:
Frekuensi ambang warna merah pada λ0 = adalah:
Karena energy minimum yang diperlukan untuk melepaskan electron dari
permukaan warna merah yang disinari LED merah tidak boleh melebihi energy
dari cahaya datang LED merah, maka nilai frekuensi ambang tidak boleh melebihi
frekuensi LED merah, . Maka batas dari sensor warna ini mampu
mendeteksi warna merah adalah warna merah dengan panjang gelombang yang
berkisar antara (640 – 740) nm.
Selanjutnya, tegangan LED ( ) dapat diketahui dengan menggunakan
persamaan (19).
Tegangan LED ( ) pada adalah:

7
Tegangan LED ( ) pada = adalah:
Nilai dan maka,
Tegangan output ( ) pada adalah:
Tegangan output ( ) pada adalah:
Nilai ADC1 batas atas adalah:
Nilai ADC1 batas bawah adalah:
8
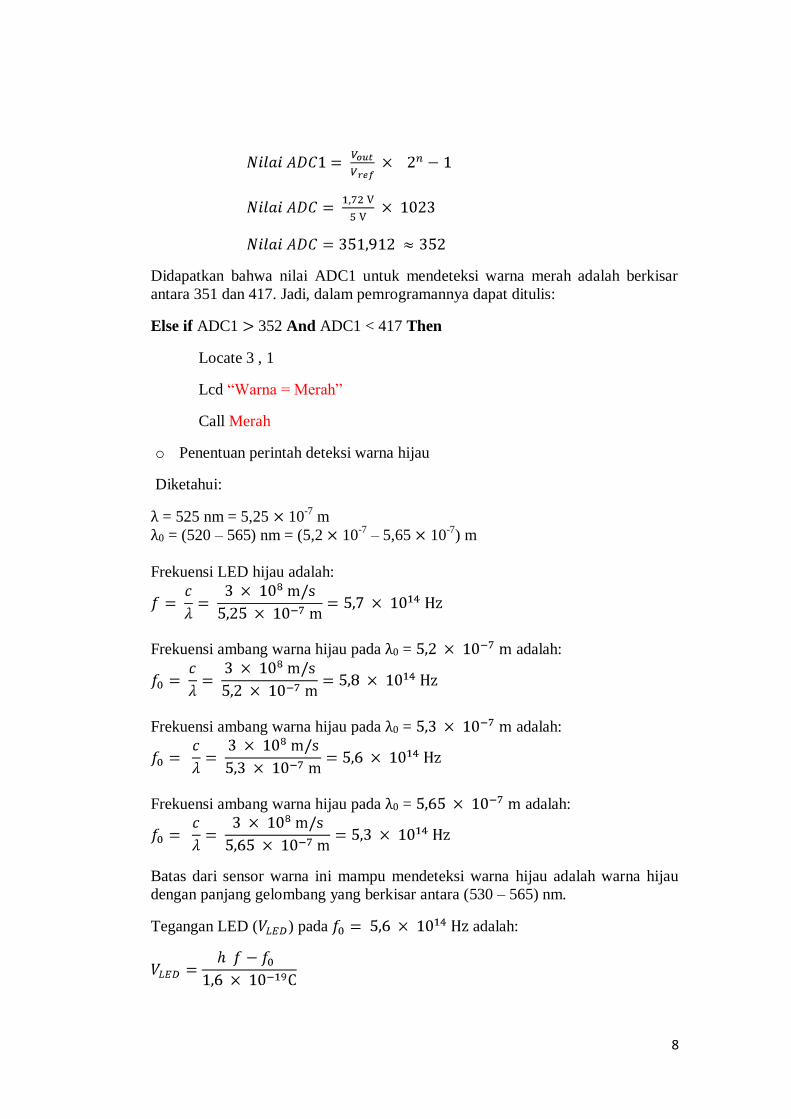
Didapatkan bahwa nilai ADC1 untuk mendeteksi warna merah adalah berkisar
antara 351 dan 417. Jadi, dalam pemrogramannya dapat ditulis:
Else if ADC1 > 352 And ADC1 < 417 Then
Locate 3 , 1
Lcd “Warna = Merah”
Call Merah
o Penentuan perintah deteksi warna hijau
Diketahui:
λ = 525 nm = 5,25 × 10-7
m
λ0 = (520 – 565) nm = (5,2 × 10-7
– 5,65 × 10-7
) m
Frekuensi LED hijau adalah:
Frekuensi ambang warna hijau pada λ0 = adalah:
Frekuensi ambang warna hijau pada λ0 = adalah:
Frekuensi ambang warna hijau pada λ0 = adalah:
Batas dari sensor warna ini mampu mendeteksi warna hijau adalah warna hijau
dengan panjang gelombang yang berkisar antara (530 – 565) nm.
Tegangan LED ( ) pada adalah:

9
Tegangan LED ( ) pada = adalah:
Nilai dan maka,
Tegangan output ( ) pada adalah:
Tegangan output ( ) pada adalah:
Nilai ADC2 batas atas adalah:
Nilai ADC2 batas bawah adalah:

10
Didapatkan bahwa nilai ADC1 untuk mendeteksi warna merah adalah berkisar
antara 581 dan 626. Jadi, dalam pemrogramannya dapat ditulis:
Else if ADC2 > 581 And ADC2 < 626 Then
Locate 3 , 1
Lcd “Warna = Hijau”
Call Hijau
o Penentuan perintah deteksi warna biru
Diketahui:
λ = 470 nm = 4,7 × 10-7
m
λ0 = (450 – 495) nm = (4,5 × 10-7
– 4,95 × 10-7
) m
Frekuensi LED hijau adalah:
Frekuensi ambang warna hijau pada λ0 = adalah:
Frekuensi ambang warna hijau pada λ0 = adalah:
Frekuensi ambang warna hijau pada λ0 = adalah:
Batas dari sensor warna ini mampu mendeteksi warna biru adalah warna biru
dengan panjang gelombang yang berkisar antara (480 – 495) nm.
Tegangan LED ( ) pada adalah:

11
Tegangan LED ( ) pada = adalah:
Nilai dan maka,
Tegangan output ( ) pada adalah:
Tegangan output ( ) pada adalah:
Berdasarkan persamaan (3) maka,
Nilai ADC2 batas atas adalah:
Nilai ADC2 batas bawah adalah:

12
Didapatkan bahwa nilai ADC1 untuk mendeteksi warna merah adalah berkisar
antara 589 dan 900. Jadi, dalam pemrogramannya dapat ditulis:
Else if ADC2 > 589 And ADC2 < 900 Then
Locate 3 , 1
Lcd “Warna = Biru”
Call Biru
2. Tahap Kedua
Balok yang telah terdeteksi warnanya oleh sensor warna menggunakan
photodiode, akan dipindahkan ke kotak yang sesuai dengan warna balok. Untuk
memindahkannya digunakan 6 buah servo yang akan diatur putarannya
menggunakan fasilitas PWM yang ada pada PORT D di pinout ATMega32. Saat
lengan alat akan memindahkan balok ada beberapa perintah umum, yakni turun,
jepit, angkat, lepas, dan kembali. Nilai PWM dari masing-masing perintah dapat
dilihat di tabel 2.
Tabel 2. Nilai PWM dari perintah umum
No. Perintah Servo Nilai PWM
1 Turun 2 78
3 160
4 150
2 Jepit 5 130
6 160
3 Angkat 2 70
3 120
4 160
4 Lepas 5 160
6 130
5 Kembali 1 63
2 100
3 85
4 130

13
PENGUJIAN ALAT
Pengujian tingkat keberhasilan alat secara keseluruhan dapat dilihat pada tabel 3.
Tabel 3. Hasil pengujian alat pemindah barang berdasarkan warna menggunakan mikrokontroler
ATMega32.
Perhitungan keberhasilan alat lengan dalam memindahkan balok yang sesuai dengan warna baloknya
dapat dihitung sebagai berikut:
Alat Mendeteksi Balok merah
Alat Mendeteksi Balok Hijau
Pengujian
Ke Balok
Tampilan LCD Peletakkan
Balok Hasil Data 1 Data
2
Data
3
Warna
1
Merah 729 403 981 Merah Kotak
merah
Berhasil
Hijau 637 859 991 Hijau Kotak hijau Berhasil
Biru 361 817 970 Biru Kotak biru Berhasil
2
Merah 699 315 967 Merah Kotak
merah
Berhasil
Hijau 608 788 989 Hijau Kotak hijau Berhasil
Biru 228 793 976 Biru Kotak biru Berhasil
3
Merah 625 696 965 Merah Jatuh Tidak
Berhasil
Hijau 646 746 969 Hijau Kotak hijau Berhasil
Biru 259 809 994 Biru Kotak biru Berhasil
4
Merah 652 736 979 Merah Kotak
merah
Berhasil
Hijau 477 848 998 Hijau Kotak hijau Berhasil
Biru 622 802 995 Hijau Kotak hijau Tidak
Berhasil
5
Merah 600 419 927 Merah Kotak
merah
Berhasil
Hijau 639 833 997 Hijau Kotak hijau Berhasil
Biru 324 814 1004 Biru Kotak biru Berhasil
6
Merah 634 289 969 Merah Kotak
merah
Berhasil
Hijau 445 776 996 Hijau Kotak hijau Berhasil
Biru 320 800 997 Biru Kotak biru Berhasil

14
Alat Mendeteksi Balok Biru
Presentase rata-rata keberhasilan alat lengan dalam memindahkan balok berwarna sesuai dengan
warnanya adalah:
Sehingga diperoleh presentase keberhasilan alat lengan dalam memindahkan balok berwarna sesuai
dengan warnanya sebesar 88,67%.
PEMBAHASAN
Prototipe alat pemindah barang ini dibuat dengan sistem kontrol menggunakan ATMega32. Alasan
menggunakan mikrokontroler ATMega32 karena ia memiliki fasilitas ADC yang dapat mengubah data
analog ke data digital dan fasilitas PWM yang dapat mengatur putaran servo. Dalam pembuatan alat ini
dapat juga menggunakan mikrokontroler lainnya yang karakteristiknya sama, misalnya mikrokontroler
ATMega8. Akan tetapi mikrokontroler ATMega8 memiliki 8 Kb dalam sistem pemrogramannya, dimana
kapasitas ini dikhawatirkan akan kurang saat menyuntikkan program alat pemindah barang ke dalam
mikrokontroler tersebut. Sehingga mikrokontroler yang digunakan adalah mikrokontroler ATMega32
dengan kapasitas memori 32 Kb dalam sistem pemrogramannya. Memori 32 Kb dirasa sudah lebih dari
cukup untuk menyuntikkan program yang dibuat untuk alat pemindah barang berdasarkan warna sehingga
tidak perlu menggunakan mikrokontroler yang kapasitas memorinya lebih tinggi dari mikrokontroler
ATMega32.
Pengujian dilakukan untuk melihat keberhasilan prototipe lengan alat menggunakan ATMega32
dalam memindahkan balok berdasarkan warna pada balok. Pengujian pertama yakni menguji rangkaian
sensor warna menggunakan photodiode dalam mendeteksi warna balok. Pengujian sensor warna ini
dilakukan sebanyak 6 kali percobaan pada masing-masing balok berwarna.
Dalam 6 kali percobaan ada 3 kali sensor salah mendeteksi warna, yakni: pada percobaan pertama
balok hijau terdeteksi menjadi warna merah dan balok biru terdeteksi menjadi balok hijau; pada percobaan
ketiga balok merah terdeteksi menjadi warna hijau. Hal ini dikarenakan sensor warna sangat sensitif
terhadap cahaya yang masuk. Kesalahan dalam mendeteksi warna sering kali terjadi apabila ada cahaya luar
selain dari cahaya pantulan LED pada rangkaian yang jatuh ke permukaan balok. Hal ini akan
mempengaruhi nilai dari energi cahaya yang jatuh ke permukaan balok. Sehingga saat tegangan output yang
terbaca pada photodiode diubah ke dalam data digital maka nilai ADC akan tidak sesuai dengan yang telah
diprogram.
Pengujian berikutnya yakni menguji prototipe lengan alat secara keseluruhan, pengujian dilakukan
dengan melihat apakah sensor warna telah dapat mendeteksi warna pada balok dengan baik dan lengan alat
dapat memindahkan balok sesuai dengan warna yang terdeteksi. Pengujian dilakukan sebanyak 6 kali
percobaan dari masing-masing balok berwarna (balok merah, balok hijau, dan balok biru). Dari enam kali
percobaan, terdapat dua kali percobaan gagal. Percobaaan ketiga gagal karena servo terlalu kuat bergerak
sedangkan jepitan servo terhadap balok tidak pas sehingga balok terlepas dari jepitan alat. Hal ini adalah
salah satu konsekuensi menggunakan motor servo, kekuatan gerak motor servo tidak bisa diatur, program

15
hanya bisa mengatur putaran servo. Percobaan keempat gagal karena sensor salah mendeteksi warna balok
sehingga tidak ditempatkan ke tempat yang warnanya sama dengan balok (lihat tabel 7). Hal ini dikarenakan
balok tidak begitu menempel di atas sensor warna sehingga cahaya dari luar ikut masuk ke area deteksi
sensor warna.
KESIMPULAN
Desain dan Prototipe alat pemindah barang menggunakan mikrokontroler ATMega32 telah berhasil
dibuat dengan persentase keberhasilan adalah 88,67%. Besar ketidakberhasilan alat ini dalam memindahkan
balok adalah 11,33%. Kegagalan disebabkan ada cahaya luar selain dari cahaya pantulan LED pada
rangkaian yang jatuh ke permukaan balok. Hal ini akan mempengaruhi nilai dari energi cahaya yang jatuh
ke permukaan balok. Sehingga saat tegangan output yang terbaca pada photodiode diubah ke dalam data
digital maka nilai ADC akan tidak sesuai dengan yang telah diprogram. Selain itu, jepitan servo tidak kuat
sehingga balok terlepas sebelum masuk ke kotak yang semestinya.

16
DAFTAR PUSTAKA
Beiser, Arthur. 1991. Konsep Fisika Modern. Jakarta: Erlangga.
Bolton, W. 2006. Sistem Instrumentasi dan Sistem Kontrol. Jakarta: Erlangga.
Budiharto, Widodo dan Paulus Andi Nalwan. 2013. Membuat Sendiri Robot
Humanoid. Jakarta: Elex Media Komputindo.
Bramasti, Rully. 2013. Taktis Menguasai Elektronika Digital. Surakarta: Aksarra
Sinergi Media.
Data sheet AVR ATMega32. ATMEL.
Data sheet 5 mm standard oval LED. Avago Technologies.
Havitz, H.E. 2008. Rancang Bangun Gerak Alat Pemindah Barang Berdasrkan
Jalur Garis Hitam Dengan Basis Mikrokontroler AT89S52. Jakarta:
Prosiding Seminar Nasional Teknoin 2008 Bidang Elektro.
Indrayanto, Andes. 2003. Aplikasi Mikrokontroler ATMEL 90S8515 Sebagai
Pengatur Pada Alat Penyeleksian dan Pemindah Barang. Semarang:
Jurnal Jurusan Teknik Elektro Universitas Diponogoro.
Nurhayati, Diah. 2013. Analisis Pengaruh Warna Bahan Uji Terhadap Tegangan
Output Sensor Warna. Semarang: Jurnal jurusan IKIP PGRI Semarang.
Plant, Malcolm dan Jan Stuart. 1985. Pengantar Ilmu Teknik Instrumentasi.
Jakarta: Gramedia.
Purnawan. 2001. Prototif Alat Pemindah Balok dengan Mikrokontroler AT89C51.
Semarang: Jurnal Teknik Elektro.







