control pelacak matahari
DESCRIPTION
dfTRANSCRIPT

PERANCANGAN DAN SIMULASI SISTEM KONTROL PERANCANGAN DAN SIMULASI SISTEM KONTROL
POSISI PADA PANEL SURYA DENGAN POSISI PADA PANEL SURYA DENGAN
MENGGUNAKAN METODE MENGGUNAKAN METODE FUZZY FUZZY SLIDING MODE SLIDING MODE
CONTROLCONTROL ((FFSMC)SMC)
OLEH :
WAWAN ISMANTO (1205 100 063)
DOSEN PEMBIMBING:
Dra. Mardlijah, M.T (131 933 301)
Drs. I Gst Ngr Rai Usadha, M.Si (131 846 103)

DAFTAR ISIDAFTAR ISI1. LATAR BELAKANG
2. RUMUSAN DAN BATASAN MASALAH
3. TUJUAN DAN MANFAAT
4. SISTEM PENGENDALIAN
5. DESKRIPSI DAN SISTEM KERJA PANEL SURYA
6. EFEKTIVITAS PANEL SURYA
7. MOTOR SERVO DC, AMPLIFIER, TAKOMETER, DAN RODA GIGI
8. SLIDING MODE CONTROL (SMC)
9. FUZZY LOGIC CONTROL (FLC)
10. FUZZY SLIDING MODE CONTROL (FSMC)
11. METODE PENELITIAN
12. PEMODELAN MATEMATIKA SISTEM PANEL SURYA
13. PERANCANGAN PENGENDALI SMC
14. PERANCANGAN PENGENDALI FLC
15. PERANCANGAN PENGENDALI FSMC
16. HASIL SIMULASI DENGAN TANPA GANGGUAN
17. HASIL SIMULASI DENGAN GANGGUAN INTERNAL
18. HASIL SIMULASI DENGAN GANGGUAN EKSTERNAL
19. KESIMPULAN DAN SARAN
20. SIMULASI MATLAB DAN FLASH

LATAR BELAKANGLATAR BELAKANG
INDONESIA POTENSI ENERGI
TERBATAS SO, WHAT???
ENERGI SURYAPANEL SURYA
PID, SMC, FLC FSMC
SISTEM PENGENDALI
ROBUST
T U G A S A K H I R
RUMUSAN DAN BATASAN MASALAHRUMUSAN DAN BATASAN MASALAH
� Bagaimana rancangan sistem kontrol posisi padapelacak matahari dengan menggunakan metodeSMC
� Bagaimana performansi sistem kontrol posisipada pelacak matahari dengan menggunakanmetode SMmetode SM
• Model fuzzy yang digunakan adalah model fuzzy mamdani• Diasumsikan sistem dari panel surya bersifat terkontrol
(controllable).• Diasumsikan bahwa model pergerakan matahari adalah konstan.• Posisi yang dimaksud dalam tugas akhir ini adalah posisi sudut.• Model dari sistem panel surya sudah diambil dari referensi.• Gangguan pada sistem adalah semua gangguan yang berhubungan
dengan berubahnya pergerakan panel surya
TUJUAN DAN MANFAATTUJUAN DAN MANFAAT
TUJUAN :� Merancang sistem kontrol posisi pada panel surya
dengan menggunakan metode FSMC.� Menganalisa performansi sistem kontrol posisi
pada panel surya dengan menggunakan metode pada panel surya dengan menggunakan metode FSMC.
MANFAAT :
Diperoleh rancangan sistem kontrol posisi pada panel suryadengan menggunakan metode FSMC yang robust terhadapsistem nonlinier serta memiliki banyak ketidakpastiansehingga dapat diterapkan pada sel surya dalammemaksimalkan penyerapan cahaya matahari.

SISTEM PENGENDALIANSISTEM PENGENDALIAN
SISTEM PENGENDALI
OPERATORNYA
MANUAL OTOMATIK
JARINGAN
LOOP TERBUKA
LOOP TERTUTUP
DESKRIPSI DAN SISTEM KERJA DESKRIPSI DAN SISTEM KERJA PANEL SURYAPANEL SURYA
Sensor
MatahariPengendali
Driver
Motor
+
+
Laju sinar matahari
Laju motor
perintaahLaju TrimGalat posisi
iθ
Pengurang
Kecepatan
+
Piringan Pengumpul
Beban
Usikan torsi Td
oθ
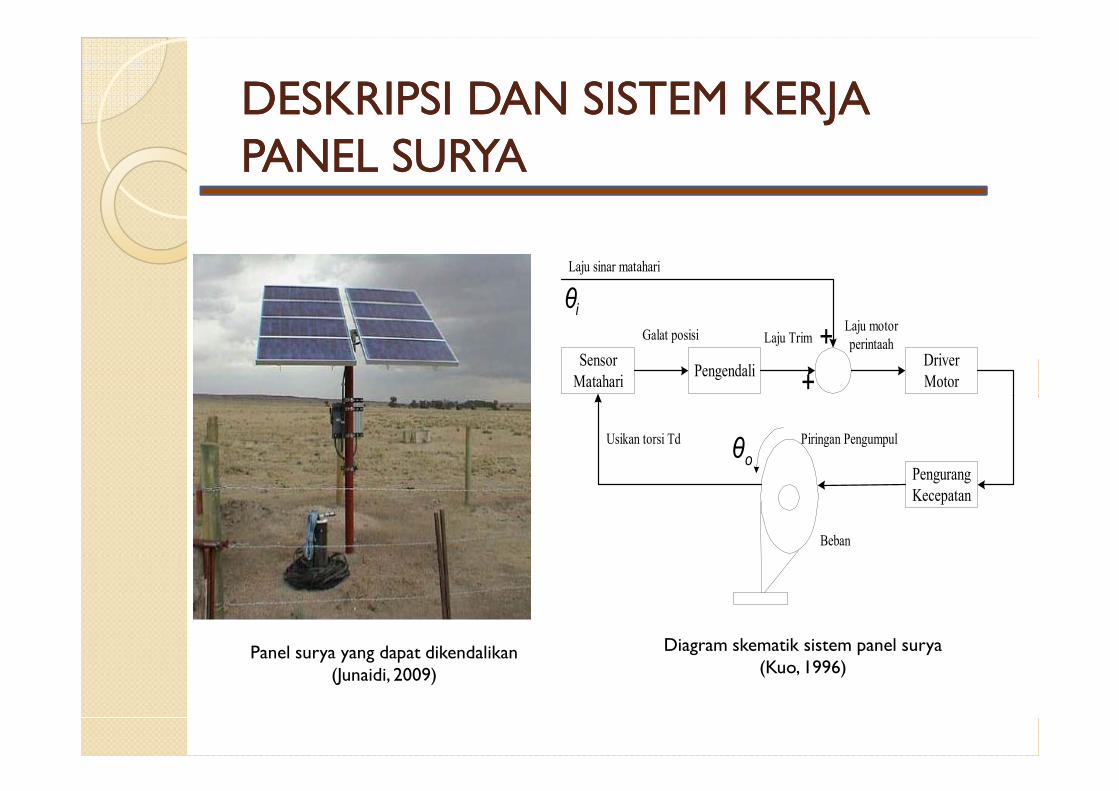
Panel surya yang dapat dikendalikan (Junaidi, 2009)
Diagram skematik sistem panel surya (Kuo, 1996)

EFEKTIVITAS PANEL SURYAEFEKTIVITAS PANEL SURYA
PANEL SURYA EFEKTIF = MAKSIMUM
POSISI SUDUT POSISI SUDUT
MATAHARI

MOTOR SERVO DC, AMPLIFIER, MOTOR SERVO DC, AMPLIFIER, TAKOMETER, DAN RODA GIGITAKOMETER, DAN RODA GIGI
( ) ( ) ( ) ( )tedt
tdiLtiRte b
a
aaaa ++=
( ) ( )tKte mbb ω=
( ) ( )tiKtT amm =
Motor Servo DC Amplifier
( ) ( ) ( )[ ] ( )tKeteteKte stoa -- =+=
Takometer
( ) ( )tKte mtt ω=( ) ( )tiKtT amm =
( ) ( ) ( )tBdt
tdJtT m
mm ω
ω+= Roda Gigi
mnθθ
10 =

SLIDING MODE CONTROL (SMC)SLIDING MODE CONTROL (SMC)
( )( )
)1(11
1, knk
nn
ek
nke
dt
dtxS −−
−
=
−
−=
+= ∑ λλ
Fungsi Switching
Sistem Dinamis
0k kdt =
∑
atau
Permukaan Sliding
Kondisi Sliding
Kondisi sliding

FUZZY LOGIC CONTROL (FLC)FUZZY LOGIC CONTROL (FLC)
Harga kebenaran logika fuzzy diberikan dalamterminologi linguistik dengan menyertakan predikatkekaburan (fuzzines) pada proposisinya
suatu himpunan fuzzy (fuzzy set) A dalam semestapembicaraan (Universe of discourse) U dinyatakanpembicaraan (Universe of discourse) U dinyatakandengan fungsi keanggotaan (membership function)µA, yang harganya berada dalam interval [0,1].Harga kebenaran dalam logika fuzzy dinyatakanberdasarkan fungsi keanggotaan µA, dimana untukµA = 1 berarti memiliki keanggotaan penuh,sedangkan µA = 0 berarti tidak termasuk sebagaianggota dari himpunan bagian tersebut
A = { (u, µA (u) / u ∈ U) }
LANJUTAN FLCLANJUTAN FLC
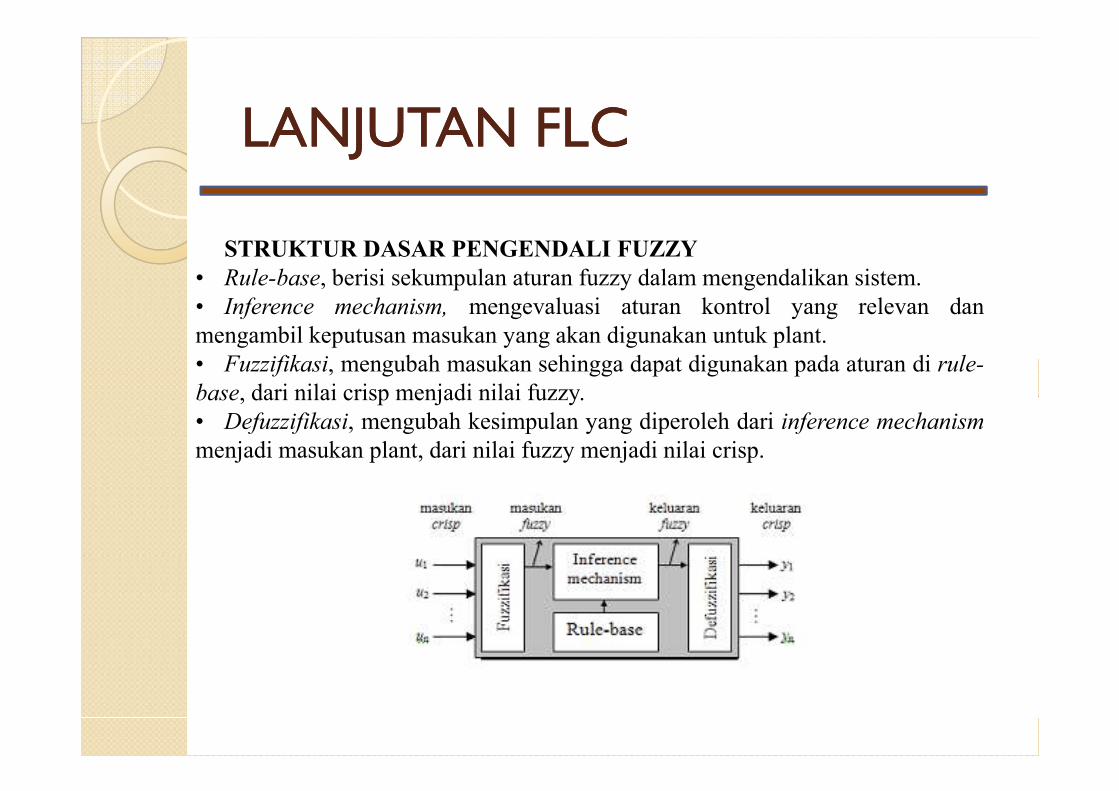
STRUKTUR DASAR PE�GE�DALI FUZZY
• Rule-base, berisi sekumpulan aturan fuzzy dalam mengendalikan sistem.
• Inference mechanism, mengevaluasi aturan kontrol yang relevan dan
mengambil keputusan masukan yang akan digunakan untuk plant.
• Fuzzifikasi, mengubah masukan sehingga dapat digunakan pada aturan di rule-
base, dari nilai crisp menjadi nilai fuzzy.base, dari nilai crisp menjadi nilai fuzzy.
• Defuzzifikasi, mengubah kesimpulan yang diperoleh dari inference mechanism
menjadi masukan plant, dari nilai fuzzy menjadi nilai crisp.

FUZZY SLIDING MODE CONTROL FUZZY SLIDING MODE CONTROL (FSMC)(FSMC)
menunjukkan jarak antara titik
Interpretasi grafis dari Sp dan d (Palm, 1997)
menunjukkan jarak antara titik
keadaan dan permukaan sliding. d
menunjukkan jarak antara titik keadaan
dan garis normal dari permukaan
sliding yang melalui titik asal bidang
METODE PENELITIANMETODE PENELITIAN
1. Studi Literatur.
2. Pemodelan Sistem Posisi Panel Surya.
3. Perancangan Pengendali Sistem
Posisi Panel surya.Posisi Panel surya.
4. Simulasi Sistem Pengendali Pada
Matlab.
5. Analisa Hasil Simulasi.
6. Penyimpulan Hasil Simulasi dan
Pemberian Saran.

PEMODELAN MATEMATIKA PADA PEMODELAN MATEMATIKA PADA SISTEM POSISI PANEL SURYASISTEM POSISI PANEL SURYA

PERANCANGAN PENGENDALI PERANCANGAN PENGENDALI SMCSMC
1 2ˆ ˆ
ˆˆ ( )ˆ ˆ ˆ d
D Du d
C C C
λ λω ω ω
−= + + −& &
1 1 2 2ˆˆ ˆ
max max maxD D D D d d
KC C C C
ηω ω
− − −= + + +
&
1 2 1 1 2 2ˆˆ ˆ ˆ ˆ
max max max ( )ˆ ˆ ˆ d
D D D D D D d d Su Sat
C C C CC C C
λ λ ηω ω ω ω ω
− − − −= + + − + + +
Φ & & &
PERANCANGAN PENGENDALIPERANCANGAN PENGENDALIFLCFLC
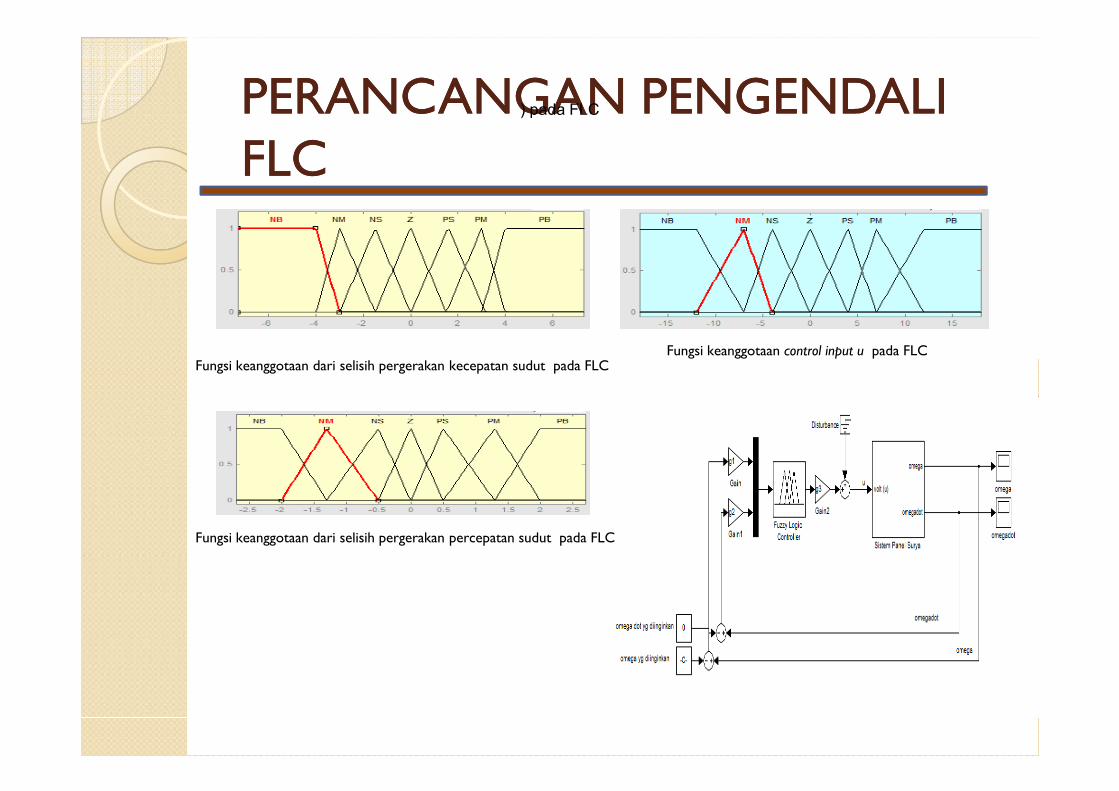
) pada FLC
Fungsi keanggotaan dari selisih pergerakan kecepatan sudut pada FLCFungsi keanggotaan control input u pada FLC
Fungsi keanggotaan dari selisih pergerakan percepatan sudut pada FLC

PERANCANGAN PENGENDALIPERANCANGAN PENGENDALIFSMCFSMC
Fungsi Switching S
Permukaan Sliding
Fungsi keanggotaan d pada FSMC
Fungsi keanggotaan Sp pada FSMCFungsi keanggotaan control input u pada FSMC
HASIL SIMULASI DENGAN TANPA HASIL SIMULASI DENGAN TANPA GANGGUANGANGGUAN
2,
3,
4,
5,
6,
7,
8,x 10
-5Kecepatan sudut (rad/detik)
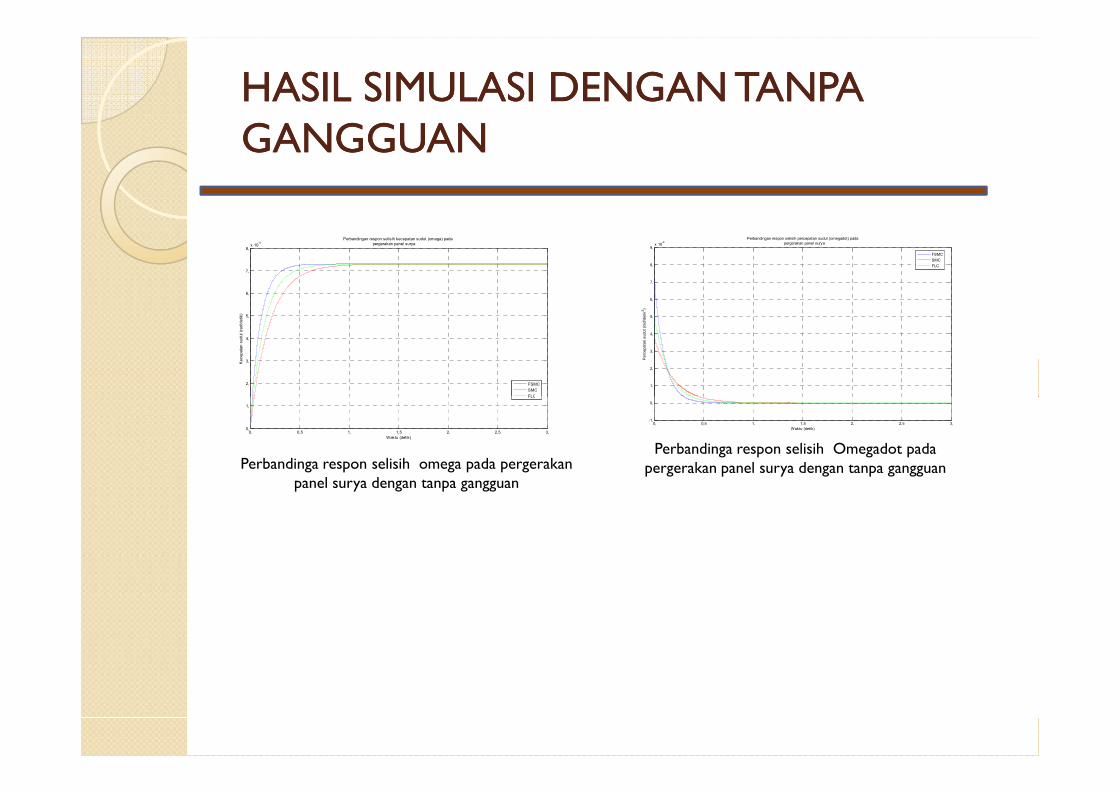
Perbandingan respon selisih kecepatan sudut (omega) pada
pergerakan panel surya
FSMC
SMC
FLC
1,
2,
3,
4,
5,
6,
7,
8,
9,x 10
-4
Percepatan sudut (rad/detik2)
Perbandingan respon selisih percepatan sudut (omegadot) pada
pergerakan panel surya
FSMC
SMC
FLC
0, 0,5 1, 1,5 2, 2,5 3,0,
1,
Waktu (detik)
FLC
0, 0,5 1, 1,5 2, 2,5 3,-1,
0,
Waktu (detik)
Perbandinga respon selisih omega pada pergerakan panel surya dengan tanpa gangguan
Perbandinga respon selisih Omegadot pada pergerakan panel surya dengan tanpa gangguan
HASIL SIMULASI DENGAN GANGGUAN HASIL SIMULASI DENGAN GANGGUAN EKSTERNALEKSTERNAL
0,6
0,7
0,8
0,9
1,x 10
-3
Kecepatan sudut (rad/detik)
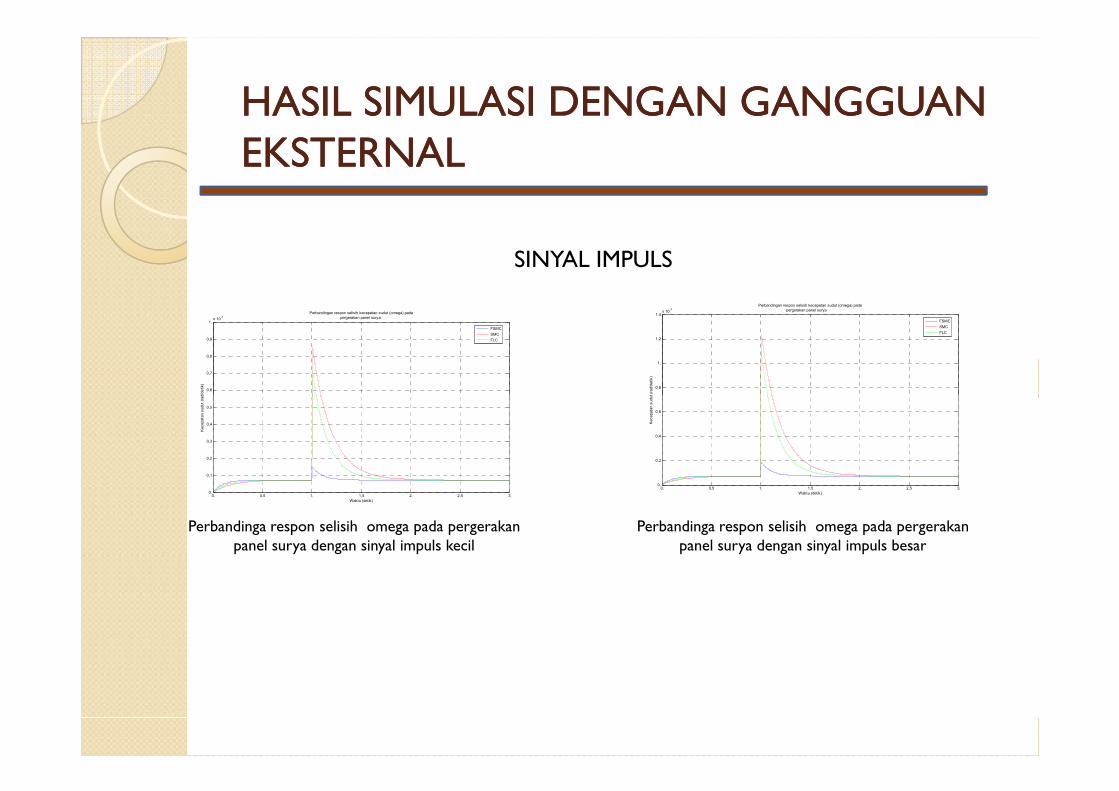
Perbandingan respon selisih kecepatan sudut (omega) pada
pergerakan panel surya
FSMC
SMC
FLC
0,8
1,
1,2
1,4x 10
-3
Kecepatan sudut (rad/detik)
Perbandingan respon selisih kecepatan sudut (omega) pada
pergerakan panel surya
FSMC
SMC
FLC
SINYAL IMPULS
0, 0,5 1, 1,5 2, 2,5 3,0,
0,1
0,2
0,3
0,4
0,5
Waktu (detik)
Kecepatan sudut (rad/detik)
0, 0,5 1, 1,5 2, 2,5 3,
0,
0,2
0,4
0,6
Waktu (detik)
Kecepatan sudut (rad/detik)
Perbandinga respon selisih omega pada pergerakan panel surya dengan sinyal impuls kecil
Perbandinga respon selisih omega pada pergerakan panel surya dengan sinyal impuls besar
0,02
0,025
0,03
Kecepatan sudut (rad/detik)
Perbandingan respon selisih kecepatan sudut (omega) pada
pergerakan panel surya
FSMC
SMC
FLC
0,04
0,05
0,06
Kecepatan sudut (rad/detik)
Perbandingan respon selish kecepatan sudut (omega) pada
pergerakan panel surya
FSMC
SMC
FLC
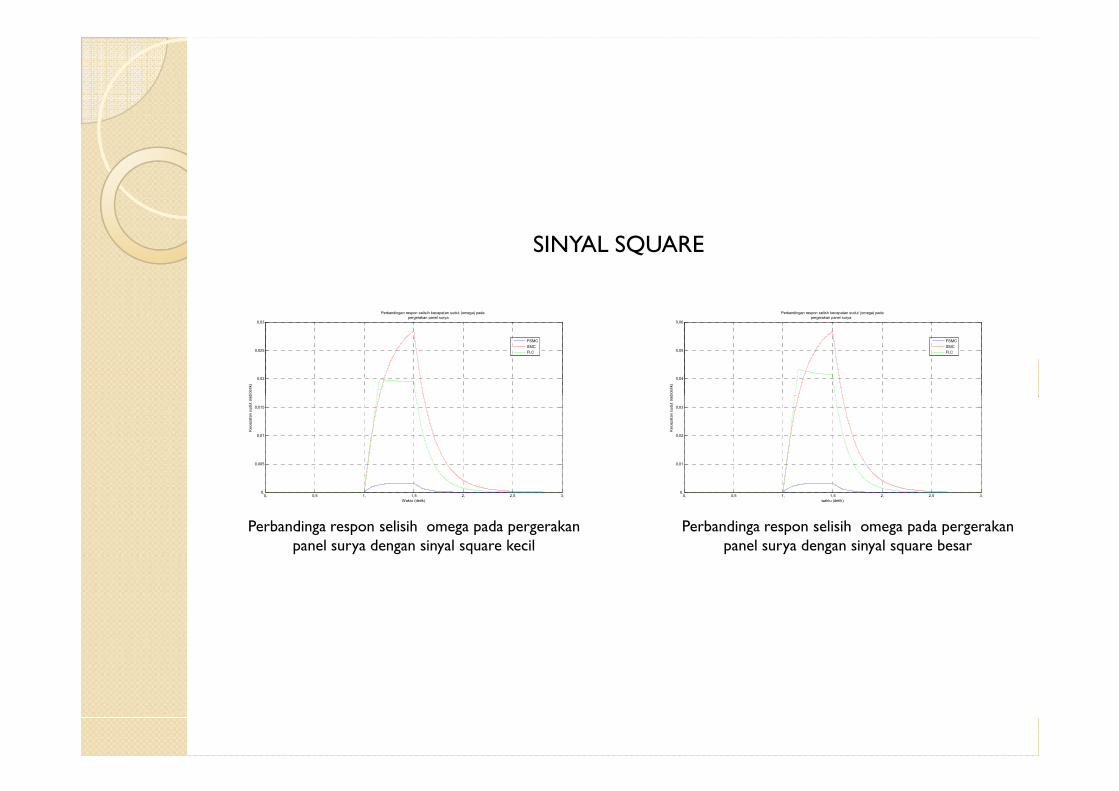
SINYAL SQUARE
0, 0,5 1, 1,5 2, 2,5 3,0,
0,005
0,01
0,015
Waktu (detik)
Kecepatan sudut (rad/detik)
0, 0,5 1, 1,5 2, 2,5 3,
0,
0,01
0,02
0,03
waktu (detik)
Kecepatan sudut (rad/detik)
Perbandinga respon selisih omega pada pergerakan panel surya dengan sinyal square kecil
Perbandinga respon selisih omega pada pergerakan panel surya dengan sinyal square besar

HASIL SIMULASI DENGAN HASIL SIMULASI DENGAN GANGGUAN INTERNALGANGGUAN INTERNAL
2,
3,
4,
5,
6,
7,
8,x 10
-5
Kecepatan sudut (rad/detik)
Perbandingan respon kecepatan sudut (omega) pada
pergerakan panel surya
2,
3,
4,
5,
6,
7,
8,x 10
-5
Kecepatan sudut (rad/detik)
Perbandingan respon selisih kecepatan sudut (omega) pada
pergerakan panel surya
0, 0,5 1, 1,5 2, 2,5 3,0,
1,
2,
Waktu (detik)
FSMC
SMC
FLC
0, 0,5 1, 1,5 2, 2,5 3,0,
1,
Waktu (detik)
FSMC
SMC
FLC
Perbandinga respon selisih omega pada pergerakan panel surya dengan perubahan parameter minimum
Perbandinga respon selisih omega pada pergerakan panel surya dengan perubahan parameter maksimum
KESIMPULAN DAN SARANKESIMPULAN DAN SARAN
Kesimpulan
Dari analisis dan pembahasan yang telah dilakukan pada sistem pengendali FSMC pada plant sistem panel surya diperoleh kesimpulan bahwa :
1. Rancangan sistem pengendali FSMC pada sistem panel surya yang robust terhadap berbagai gangguan terdiri dari fungsi keanggotaan fuzzy, aturan fuzzy, dan susunan diagram blok dari pengendali pada sistem panel surya telah dikerjakan sebelumnya
2. Rancangan pengendali FSMC dimulai dengan pembentukan fungsi switching S, yaitu :
Performansi sistem pengendali FSMC pada sistem panel surya memilki beberapa kelebihan dibandingkan sistem pengendali SMC dan FLC, yaitu :
� Lebih robust terhadap berbagai gangguan eksternal yang bersifat kecil maupun besar.
� Lebih robust terhadap gangguan internal yang berupa ketidakpastian parameter.
� Lebih mudah dan sederhana dalam perancangannya.
� Waktu respon lebih cepat.
Namun, masih terdapat beberapa kekurangan yang dimilki sistem pengendali FSMC, yaitu :
1. Membutuhkan penalaan gain agar logika fuzzy dapat mencapai performansi yang baik serta dapat bekerja dengan baik.
2. Adanya overshoot pada pengujian gangguan yang bersifat ekstenal, tetapi overshoot yang ada masih dapat ditolerir.
Permukaan Sliding :
Lanjutan...Lanjutan...
Saran
� Dalam tugas akhir ini pengontrolan panel surya agarmengikuti arah gerak matahari adalah melaluikecepatan sudut dari motor servo DC, oleh karenaitu akan lebih baik lagi apabila pengontrolan dilakukandengan melihat sudut dari matahari dikaji lebih lanjutitu akan lebih baik lagi apabila pengontrolan dilakukandengan melihat sudut dari matahari dikaji lebih lanjutpada penelitian selanjutnya agar memperoleh hasilyang maksimal.
� Setelah pengujian sistem pengendali FSMC padasistem panel surya diperoleh hasil yang baik, makasebaiknya sistem pengendali FSMC diuji lebih lanjutpada sistem-sistem lainnya.
SIMULASI MATLAB DAN FLASHSIMULASI MATLAB DAN FLASH
DAFTAR PUSTAKADAFTAR PUSTAKA
� Arismunandar, W. 1995. Teknologi Rekayasa Surya. Jakarta: PT PRADNYA PARAMITA
� Junaidi, M.A. 2009. Perancangan dan Simulasi Sistem Kontrol Posisi Pada Panel Surya dengan Menggunakan Metode Sliding Mode Control (SMC). Surabaya: Institut Teknologi Sepuluh Nopember
� Kuo, C. B. 1998. Teknik Kontrol Automatik Jilid 1. Jakarta: Prenhallindo
� Leksono, E. dan Hadi, S. 2000. “Perancangan Sistem Sliding Mode Control dengan Penala Logika Fuzzy untuk Manipulator Robot”. Proceeding Seminar of Intelligent Technology and Its Applications. SITIA’2000.
� Messner, W. dan Tilbury, D. 1998. Control Tutorials for Matlab and Simulink. <URL: http: //www. engin. umich. edu/ class/ ctms/ simulink/ examples/ pend/ pendsim. htm
� Mintorogo, D.S. 2000. Strategi Aplikasi Sel Surya (Photovoltaic Cells) Pada Perumahan dan Bangunan Komersial. Surabaya: Universitas Kristen Petra.Surabaya: Universitas Kristen Petra.
� Musafa, A. 2003. Perancangan dan Simulasi Sistem Kontrol Posisi Pelacak Matahari Dengan Pengendali PID. Fakultas Teknik Universitas Budi Luhur.
� Ogata, K. 1996. Teknik Kontrol Automatik Edisi Kedua Jilid 1. Jakarta: Erlangga
� Palm, R., Driankov, D., dan Hellendoorn, H. 1997. Model Based Fuzzy Control: Fuzzy Gain Schedulers and Sliding Mode Fuzzy Controllers. Berlin: Springer-Verlag.
� Passino, K.M. dan Yurkovich, S. 1998. Fuzzy Control. California: Addison Wesley Longman, Inc.
� Perruquetti, W. dan Barbot, J.P. 2002. Sliding Mode Control in Engineering. New York: Marcel Dekker, Inc.
� Rizan, R.I. 2008. Analisis dan Perancangan Sistem Pengendali Pada Inverted Pendulum Menggunakan Metode Fuzzy Sliding Mode Control. Surabaya. Institut Teknologi Sepuluh Nopember.
� Setiadi, I. 2009. Optimalisasi Arah Solar Cell Terhadap Intensitas Cahaya Matahari Dalam Dua Sumbu Berbasis Mikrokontroller. Surabaya : Institut Teknologi Sepuluh Nopember.
� Tien, N.T. 2002. Sliding Control. Applied Nonlinear Control. <URL: https://www2.hcmut.edu.vn/~nttien/Lectures/Applied%20nonlinear%20control/ C.7%20Sliding%20Control.pdf>
� Zhang, H. dan Liu, D. 2006. Fuzzy Modeling and Fuzzy Control. Boston: Birkhäuser.
� Zhu, F.Q.Q.M., Winfield, A., dan Melhuish, C. 2003. “Fuzzy Sliding Mode Control for Discrete Nonlinear Sistems”. Transactions of China Automation Society, Vol. 22, No. 2 (Sum No. 86).
�
SEKIAN ...SEKIAN ...TERIMA KASIHTERIMA KASIHTERIMA KASIHTERIMA KASIH