bab iv osilasi tujuan instruksional · dalam pegas shock absorber mobil. karakteristik gerak...
TRANSCRIPT
94
BAB IV
Osilasi
Tujuan Instruksional
Setelah mempelajari bab ini pembaca diharapkan dapat:
1. Menuliskan persamaan differensial ayunan sederhana.
2. Menentukan solusi analitik persamaan differensial ayunan sederhana.
3. Menentukan solusi numerik persamaan differensial ayunan sederhana.
4. Menuliskan persamaan differensial gerak harmonik sederhana.
5. Menentukan solusi analitik persamaan differensial gerak harmonik sederhana.
6. Menentukan solusi numerik persamaan differensial gerak harmonik sederhana.
7. Memahami pengaruh Increment terhadap solusi numerik persamaan
differensial dengan solusi berupa gelombang sinusoidal.
8. Memahami metode Leapfrog sebagai metode perbaikan metode Euler dalam
analisis osilasi.
9. Memahami metode Euler-Cromer sebagai metode perbaikan metode Euler
dalam analisis osilasi.
10. Menentukan solusi numerik osilator non harmonik.
11. Menentukan solusi analitik dan numerik gerak harmonik dengan redaman.
Pendahuluan
Gerak harmonik sederhana merupakan satu topik penting dalam ilmu
fisika. Pemahaman tentang gerak harmonik sederhana menjadi suatu kebutuhan
bukan saja untuk ilmuwan akan tetapi juga kalangan insinyur. Hal ini terjadi
karena bagi ilmuwan gerak harmonik sederhana merupakan dasar-dasar
memahami berbagai gejala fisika yang lebih kompleks seperti redaman sedangkan
bagi insinyur pemahaman tentang gerak harmonik sederhana penting sekali
sebagai dasar perancangan berbagai aplikasi gerak harmonik sederhana seperti
dalam pegas shock absorber mobil. Karakteristik gerak harmonik sederhana
biasanya dinyatakan dalam persamaan differensial yang secara umum diselesaikan
menurut analisis analitik namun demikian pada banyak kasus (gerak yang tidak

95
harmonik) ditemui banyak kesulitan untuk menentukan solusi menurut
pendekatan analitik, pada keadaan demikian pemecahan dengan pendekatan
analisis numerik dapat dipergunakan untuk mempelajari karakteristik sistemnya.
4.1 Ayunan Sederhana
4.1.1 Analisis Ayunan Sederhana dengan Pendekatan Analitik
Osilasi terjadi jika suatu sistem diganggu dari posisi kesetimbangan
stabilnya. Karakteristik pokok gerak osilasi adalah adanya gerak yang bersifat
periodik (berulang-ulang). Salah satu contoh gerak osilasi adalah gerak osilasi
bandul (ayunan sederhana). Gerak bandul dikategorikan gerak harmonik jika
amplitudo geraknya kecil. Sebagai contoh bandul sederhana adalah sebuah beban
bermassa m yang dihubungkan dengan benang yang massanya dapat diabaikan
seperti gambar berikut.
Gambar 4.1 Ayunan Sederhana yang Terdiri Atas Sebuah Beban yang
Dihubungkan pada Seutas Benang yang Digantungkan pada
Dinding
Misalkan Ѳ adalah sudut yang dibuat oleh benang terhadap garis vertikal
dengan asumsi benang selalu tegang (tidak kendor). Berdasarkan gambar (4.1)
dapat diuraikan gaya-gaya yang bekerja pada beban sebagi berikut. T menyatakan
tegangan tali dan mg menyatakan gaya gravitasi. Pada beban bekerja dua gaya
yaitu mg cos θ sebagai komponen radial dan dan mg sin θ sebagai komponen
tangensial. Lintasan gerak ayunan sederhana berupa busur lingkaran sehingga
m g cos θ mg mg sinθ
θ
θ T l
s

96
gaya berat berfungsi sebagai gaya sentripetal agar beban tetap bergerak dalam
lintasan busur lingkaran sedangkan komponen tangensialnya berperan sebagai
gaya pemulih. Dengan demikian besarnya gaya pemulih adalah
𝐹𝜃 = −𝑚𝑔 sin 𝜃 …(4.1)
dengan g menyatakan percepatan gravitasi, tanda minus menandakan bahwa gaya
pemulih selalu berlawanan dengan arah gerak beban.
Dengan aplikasi hukum Newton kedua yang menyatakan bahwa gaya
sebanding dengan massa dikalikan percepatan partikel sepanjang busur lingkaran
sebagai lintasan partikel, maka gaya juga dapat dinyatakan dengan persamaan
𝐹𝜃 = 𝑚 𝑑2𝑠
𝑑𝑡 2 …(4.2)
dengan demikian apabila persamaan (4.1) dan (4.2) digabungkan akan diperoleh
𝑑2𝑠
𝑑𝑡 2 = −𝑔 sin 𝜃 …(4.3)
Perpindahan sepanjang busur lingkaran adalah s = l sin θ dimana l menyatakan
panjang tali dan θ menyatakan sudut simpangannya. Apabila diasumsikan bahwa
Ѳ nilainya kecil maka berlaku sin Ѳ Ѳ, sehingga dapat dinyatakan s =l θ,
apabila persamaan ini dideferensialkan dua kali terhadap t akan diperoleh
𝑑2𝑠
𝑑𝑡 2 = 𝑙𝑑2𝜃
𝑑𝑡 2 …(4.4)
Apabila persamaan (4.4) disubstitusikan dalam persamaan (4.3) akan diperoleh
𝑙𝑑2𝜃
𝑑𝑡 2 = −𝑔 sin 𝜃
𝑑2𝜃
𝑑𝑡 2= −
𝑔
𝑙𝜃
𝑑2𝜃
𝑑𝑡 2 +𝑔
𝑙𝜃 = 0 …(4.5)
Persamaan (4.5) disebut sebagai persamaan differensial ayunan sederhana.
Adapun solusi umumnya persamaan (4.5) adalah
𝜃 = 𝜃0 𝑠𝑖𝑛 ( ω 𝑡 + ϕ ) …(4.6)
Apabila 𝜙 = 𝛿 +𝜋
2 maka persamaan (4.6) dapat dituliskan sebagai
𝜃 = 𝜃0 𝑐𝑜𝑠 ( ω 𝑡 + δ ) …(4.7)

97
Berdasarkan persamaan (4.6) dan (4.7) disimpulkan bahwa untuk gerak harmonik
sederhana dapat digambarkan sebagai fungsi gelombang sinus maupun cosinus,
adapun yang membedakan gelombang sinus dan cosinus adalah adanya perbedaan
fase (𝜙). Dengan mendefferensialkan persamaan (4.7) terhadap waktu dapat
ditentukan persamaan kecepatan sudut dan percepatan sudut sehingga akan
diperoleh persamaan berikut.
𝜔 =𝑑𝜃
𝑑𝑡= −𝜃0 ω sin(ωt + δ) …(4.8)
𝛼 = 𝑑2𝜃
𝑑𝑡 2= −𝜃0 ω2 𝑐𝑜𝑠 (ω𝑡 + δ) …(4.8)
dimana
𝜔 = 𝑔
𝑙
Berdasarkan definisi bahwa 𝜔 =2𝜋
𝑇 maka periode ayunannya dapat dinyatakan
dengan persamaan
𝑇 = 2𝜋 𝑙
𝑔 …(4.9)
Untuk menentukan besarnya periode kita juga dapat menggunakan cara lain yakni
apabila sin Ѳ Ѳ maka kita dapat menuliskan persamaan (4.1) dengan
𝐹𝜃 = −𝑚𝑔𝜃 …(4.10)
Dengan mensubstitusi s =l θ ke dalam persamaan (4.10) akan diperoleh
𝐹𝜃 = −𝑚𝑔𝑠
𝑙= −
𝑚𝑔
𝑙𝑠
Untuk sudut ayunan yang kecil maka besar gaya pemulih sebanding dengan
tetapan gaya k = mg/l sehingga berdasarkan definisi 𝜔 = 𝑘
𝑚 maka
𝜔 = 𝑚𝑔
𝑙𝑚=
𝑔
𝑙
Dengan demikian berlaku
𝑇 = 2𝜋 𝑙
𝑔
Berdasarkan definisi 𝑓 = 1
𝑇 maka frekuensi osilasinya dapat dinyatakan dengan

98
𝑓 =1
2𝜋
𝑙
𝑔 …(4.11)
dengan:
𝜃0 = posisi awal (rad)
𝜙 = fase awal
𝛿 = tetapan
𝜔 = kecepatan sudut (rad/s)
T = periode (s)
f = frekuensi (Hz)
Berdasarkan persamaan (4.6) sampai (4.11) disimpulkan bahwa posisi, kecepatan
dan percepatan sudutnya merupakan fungsi gelombang sinusoidal terhadap waktu.
Periode dan frekuensi ayunan hanya dipengaruhi oleh panjang talinya saja, masa
beban tidak berpengaruh terhadap periode ayunannya.
4.1.2 Analisis Ayunan Sederhana dengan Pendekatan Numerik
Dengan menggunakan pendekatan analitik dalam menyelesaikan suatu
persoalan maka akan diperoleh hasil yang eksak. Namun demikian dalam
pendekatan dengan analisis analitik kita sering dihadapkan pada persoalan yang
cukup rumit seperti ketika kita harus menyelesaikan suatu persamaan differensial
namun kita tidak tahu solusi analitik persamaan differensial tersebut. Kesulitan
lain yang mungkin ditemui adalah persamaan differensial yang tidak linear. Cara
yang dapat digunakan untuk mengatasi kesulitan tersebut adalah dengan
menggunakan pendekatan numerik.
Adapun langkah dalam menganalisis kasus ayunan sederhana dengan
analisis numerik adalah sebagai berikut. Persamaan (4.5) dapat dinyatakan
kembali dengan persamaan
𝑑2𝜃
𝑑𝑡 2 =𝑔
𝑙𝜃 …(4.12)
Berdasarkan definisi
𝑑2𝜃
𝑑𝑡 2=
𝑑𝜔
𝑑𝑡
maka persamaan ( 4.12) dapat dituliskan
𝑑𝜔
𝑑𝑡= −
𝑔
𝑙𝜃 …(4.13)

99
dengan mempergunakan teori Euler maka persamaan (4.13) dapat diuraikan
menjadi
𝑑𝜔
𝑑𝑡= limΔ𝑡→0
𝜔 𝑡+Δ𝑡 −𝜔(𝑡)
Δ𝑡= −
𝑔
𝑙𝜃 …(4.14)
sehingga dapat dituliskan
𝜔 𝑡+Δ𝑡 −𝜔(𝑡)
Δ𝑡= −
𝑔
𝑙𝜃
atau
𝜔 𝑡 + Δ𝑡 = 𝜔 𝑡 −𝑔
𝑙𝜃(𝑡) Δ𝑡 …(4.15)
secara umum persamaan ( 4.15 ) dapat dituliskan
𝜔1+1 = 𝜔𝑖 − 𝑔
𝑙 𝜃𝑖 Δ𝑡 …(4.16)
dengan cara yang sama, berdasarkan definisi
𝑑𝜃
𝑑𝑡= 𝜔 …(4.17)
maka persamaan (4.17) dapat diuraikan menjadi
𝜃 𝑡+Δ𝑡 −𝜃(𝑡)
Δ𝑡= 𝜔
𝜃 𝑡 + Δ𝑡 = 𝜃 𝑡 + 𝜔 Δ𝑡 …(4.18)
Secara umum persamaan (4.18) dapat dinyatakan dengan
𝜃𝑖+1 = 𝜃𝑖 + 𝜔𝑖 Δ𝑡 …(4.19)
dengan:
ω = kecepatan sudut ( rad/s)
Ѳ = posisi sudut (rad)
∆t = selang waktu
ωi = kecepatan sudut pada t = t
ωi+1 = kecepatan sudut pada t = t+∆t
θi = posisi sudut pada t = t
θi+1 = posisi sudut pada t = t+∆t

100
Contoh 4.1
Suatu ayunan sederhana terdiri dari seutas tali yang memiliki panjang 1m dengan
beban dengan masa 10 gram mula-mula dalam keadaan diam dengan posisi sudut
awal 0,15 rad. Jika kecepatan sudut awalnya 0 rad/s dan beban kemudian
dilepaskan analisislah gerakannya dengan menggunakan Spreadsheet dengan
menggunakan pendekatan analitik dan analitik numerik (catatan g = 9,8 dan ∆t =
0,03).
Penyelesaian:
Langkah awal dalam menyelesaikan soal dalam Spreadsheet adalah dengan
mendeklarasikan variabel-variabel dalam persamaan ayunan sederhana seperti
dalam tabel berikut.
Tabel 4.1 Varibel-Variabel dalam Persamaan Ayunan Sederhana
Variabel Nilai Satuan
L 1 m
m 0,01 kg
g 9.8 m/s2
ωo 0 rad/s
∆t 0.03
θ0 0.15 rad
ω 3.130495168
Langkah selanjutnya adalah melakukan komputasi dengan Spreadsheet sehingga
akan diperoleh tabel hasil komputasi seperti berikut.

101
Tabel 4.2 Perbandingan Nilai θ, ω dan α untuk Ayunan Sederhana dengan
Pendekatan Analitik dan Numerik
t θ_numerik ω_numerik α_numerik θ_analitik ω_analitik α_analitik
0 0.15 0 -1.47 0.15 0 -1.47
0.03 0.15 -0.0441 -1.47 0.149339 -0.044035 -1.4635221
0.06 0.148677 -0.0882 -1.4570346 0.147362 -0.087682 -1.4441453
0.09 0.146031 -0.131911038 -1.4311038 0.144086 -0.130557 -1.4120406
0.12 0.142073669 -0.174844152 -1.39232195 0.13954 -0.17228 -1.3674909
0.15 0.136828344 -0.216613811 -1.34091777 0.133764 -0.212485 -1.3108887
0.18 0.13032993 -0.256841344 -1.27723331 0.126809 -0.250818 -1.242733
0.21 0.12262469 -0.295158343 -1.20172196 0.118737 -0.28694 -1.1636244
0.24 0.113769939 -0.331210002 -1.11494541 0.109618 -0.320533 -1.0742602
0.27 0.103833639 -0.364658364 -1.01756967 0.099533 -0.351301 -0.975428
0.3 0.092893888 -0.395185454 -0.91036011 0.088571 -0.378973 -0.8679988
0.33 0.081038325 -0.422496257 -0.79417558 0.076829 -0.403304 -0.7529196
0.36 0.068363437 -0.446321525 -0.66996168 0.064409 -0.424081 -0.6312044
0.39 0.054973791 -0.466420375 -0.53874315 0.051421 -0.441121 -0.5039261
0.42 0.04098118 -0.48258267 -0.40161556 0.03798 -0.454273 -0.3722065
0.45 0.0265037 -0.494631137 -0.25973626 0.024205 -0.46342 -0.2372064
0.48 0.011664766 -0.502423225 -0.11431471 0.010216 -0.468484 -0.1001157
0.51 -0.00340793 -0.505852666 0.033397723 -0.003863 -0.469419 0.03785744
0.54 -0.01858351 -0.504850734 0.182118407 -0.017908 -0.466216 0.17549688
0.57 -0.03372903 -0.499387182 0.330544523 -0.031795 -0.458904 0.31158957
0.6 -0.04871065 -0.489470846 0.477364354 -0.045402 -0.447548 0.44493606
… … … … … … …
Berdasarkan tabel 4.2 dapat dikemukakan bahwa t = 0,03 s menurut analisis
analitik posisi beban adalah 0.149339 rad sedangkan menurut analisis numerik
posisi beban adalah 0.15 rad sehingga perhitungan secara numerik mengandung
kesalahan 0,44%. Menurut analisis numerik ayunan ini memiliki periode 1,77 s
sedangkan menurut analisis analitik periode ayunan ini adalah 2,00 s dengan
demikian perhitungan dengan analisis numerik mengandung kesalahan sebesar
11,5 %. Pada saat t = 6 s posisi beban menurut analisis analitik adalah 0.149668
radian sedangkan menurut analisis numerik posisi beban adalah 0.358298712
102
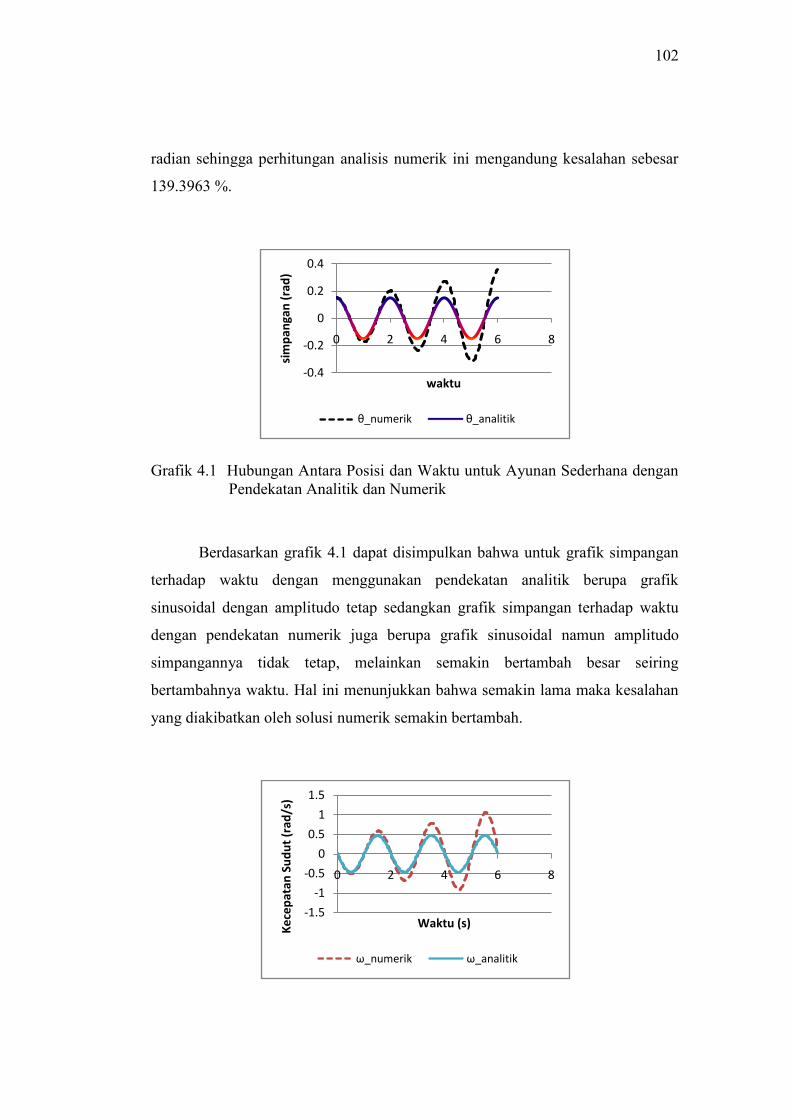
radian sehingga perhitungan analisis numerik ini mengandung kesalahan sebesar
139.3963 %.
Grafik 4.1 Hubungan Antara Posisi dan Waktu untuk Ayunan Sederhana dengan
Pendekatan Analitik dan Numerik
Berdasarkan grafik 4.1 dapat disimpulkan bahwa untuk grafik simpangan
terhadap waktu dengan menggunakan pendekatan analitik berupa grafik
sinusoidal dengan amplitudo tetap sedangkan grafik simpangan terhadap waktu
dengan pendekatan numerik juga berupa grafik sinusoidal namun amplitudo
simpangannya tidak tetap, melainkan semakin bertambah besar seiring
bertambahnya waktu. Hal ini menunjukkan bahwa semakin lama maka kesalahan
yang diakibatkan oleh solusi numerik semakin bertambah.
-0.4
-0.2
0
0.2
0.4
0 2 4 6 8
sim
pan
gan
(ra
d)
waktu
θ_numerik θ_analitik
-1.5
-1
-0.5
0
0.5
1
1.5
0 2 4 6 8
Ke
cep
atan
Su
du
t (r
ad/s
)
Waktu (s)
ω_numerik ω_analitik
103
Grafik 4.2 Hubungan Antara Kecepatan dan Waktu untuk Ayunan Sederhana
dengan Pendekatan Analitik dan Numerik
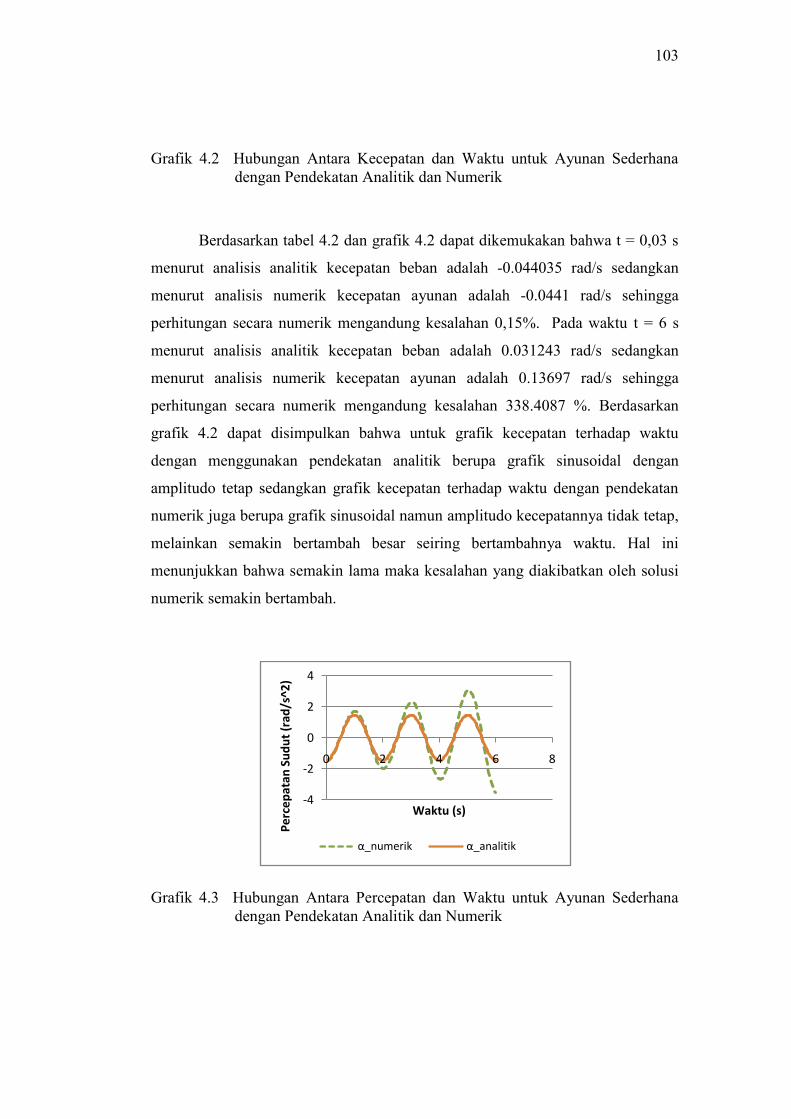
Berdasarkan tabel 4.2 dan grafik 4.2 dapat dikemukakan bahwa t = 0,03 s
menurut analisis analitik kecepatan beban adalah -0.044035 rad/s sedangkan
menurut analisis numerik kecepatan ayunan adalah -0.0441 rad/s sehingga
perhitungan secara numerik mengandung kesalahan 0,15%. Pada waktu t = 6 s
menurut analisis analitik kecepatan beban adalah 0.031243 rad/s sedangkan
menurut analisis numerik kecepatan ayunan adalah 0.13697 rad/s sehingga
perhitungan secara numerik mengandung kesalahan 338.4087 %. Berdasarkan
grafik 4.2 dapat disimpulkan bahwa untuk grafik kecepatan terhadap waktu
dengan menggunakan pendekatan analitik berupa grafik sinusoidal dengan
amplitudo tetap sedangkan grafik kecepatan terhadap waktu dengan pendekatan
numerik juga berupa grafik sinusoidal namun amplitudo kecepatannya tidak tetap,
melainkan semakin bertambah besar seiring bertambahnya waktu. Hal ini
menunjukkan bahwa semakin lama maka kesalahan yang diakibatkan oleh solusi
numerik semakin bertambah.
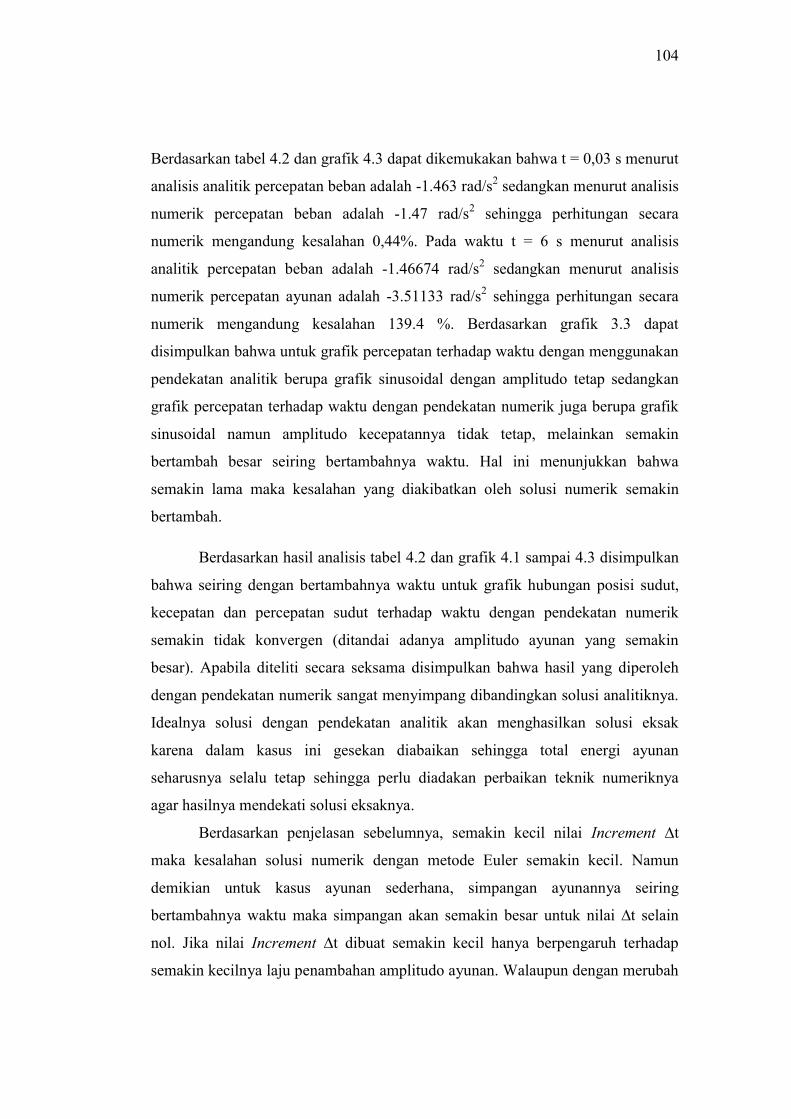
Grafik 4.3 Hubungan Antara Percepatan dan Waktu untuk Ayunan Sederhana
dengan Pendekatan Analitik dan Numerik
-4
-2
0
2
4
0 2 4 6 8
Pe
rce
pat
an S
ud
ut
(rad
/s^2
)
Waktu (s)
α_numerik α_analitik
104
Berdasarkan tabel 4.2 dan grafik 4.3 dapat dikemukakan bahwa t = 0,03 s menurut
analisis analitik percepatan beban adalah -1.463 rad/s2 sedangkan menurut analisis
numerik percepatan beban adalah -1.47 rad/s2 sehingga perhitungan secara
numerik mengandung kesalahan 0,44%. Pada waktu t = 6 s menurut analisis
analitik percepatan beban adalah -1.46674 rad/s2 sedangkan menurut analisis
numerik percepatan ayunan adalah -3.51133 rad/s2 sehingga perhitungan secara
numerik mengandung kesalahan 139.4 %. Berdasarkan grafik 3.3 dapat
disimpulkan bahwa untuk grafik percepatan terhadap waktu dengan menggunakan
pendekatan analitik berupa grafik sinusoidal dengan amplitudo tetap sedangkan
grafik percepatan terhadap waktu dengan pendekatan numerik juga berupa grafik
sinusoidal namun amplitudo kecepatannya tidak tetap, melainkan semakin
bertambah besar seiring bertambahnya waktu. Hal ini menunjukkan bahwa
semakin lama maka kesalahan yang diakibatkan oleh solusi numerik semakin
bertambah.
Berdasarkan hasil analisis tabel 4.2 dan grafik 4.1 sampai 4.3 disimpulkan
bahwa seiring dengan bertambahnya waktu untuk grafik hubungan posisi sudut,
kecepatan dan percepatan sudut terhadap waktu dengan pendekatan numerik
semakin tidak konvergen (ditandai adanya amplitudo ayunan yang semakin
besar). Apabila diteliti secara seksama disimpulkan bahwa hasil yang diperoleh
dengan pendekatan numerik sangat menyimpang dibandingkan solusi analitiknya.
Idealnya solusi dengan pendekatan analitik akan menghasilkan solusi eksak
karena dalam kasus ini gesekan diabaikan sehingga total energi ayunan
seharusnya selalu tetap sehingga perlu diadakan perbaikan teknik numeriknya
agar hasilnya mendekati solusi eksaknya.
Berdasarkan penjelasan sebelumnya, semakin kecil nilai Increment ∆t
maka kesalahan solusi numerik dengan metode Euler semakin kecil. Namun
demikian untuk kasus ayunan sederhana, simpangan ayunannya seiring
bertambahnya waktu maka simpangan akan semakin besar untuk nilai ∆t selain
nol. Jika nilai Increment ∆t dibuat semakin kecil hanya berpengaruh terhadap
semakin kecilnya laju penambahan amplitudo ayunan. Walaupun dengan merubah

105
nilai Increment ∆t sekecil apapun akan tetapi untuk Increment ∆t yang tidak sama
dengan nol akan selalu ditemukan bahwa amplitudo ayunannya selalu bertambah
seiring dengan bertambahnya waktu dengan demikian disimpulkan bahwa
penggunaan metode Euler untuk gerak harmonik sederhana kurang tepat. Hal ini
menunjukkan bahwa metode Euler tidak stabil. Meskipun tidak stabil namun
metode Euler terbukti cukup ampuh dalam menyelesaikan persoalan-persoalan
yang tidak harus memenuhi hukum kekekalan energi sehingga kesalahan
penggunaan metode numerik dengan metode Euler dapat diabaikan. Sebaliknya
untuk permasalahan-permasalahan yang melibatkan gerak osilasi dimana kita
sering menyelidiki perilaku ayunan untuk berbagai nilai periode maka metode
numerik yang digunakan harus dapat memenuhi hukum kekekalan energi
sehingga pada kasus ini metode Euler bukanlah pilihan yang tepat.
Salah satu hal dapat dilakukan untuk memperbaiki metode Euler adalah
menggunakan metode Euler-Cromer maupun metode Leapfrog. Dalam
kesempatan ini metode yang akan dipakai adalah metode Leapfrog. Berdasarkan
penjelasan bab II tentang metode Leapfrog, maka dengan menggunakan metode
Leapfrog, persamaan posisi dan kecepatan sudut ayunan sederhana diituliskan
dengan persamaan berikut.
𝜃𝑖+1 = 𝜃𝑖 + 𝜔𝑖∆𝑡 +𝛼𝑖 ∆𝑡2
2 …(4.20)
𝜔𝑖+1 = 𝜔𝑖 +𝛼𝑖+𝛼𝑖+1
2 ∆𝑡 …(4.21)
dengan demikian apabila contoh 4.1 kita kerjakan dengan menggunakan metode
Leapfrog akan kita dapatkan solusi-solusi yang dinyatakan dalam tabel berikut.
106
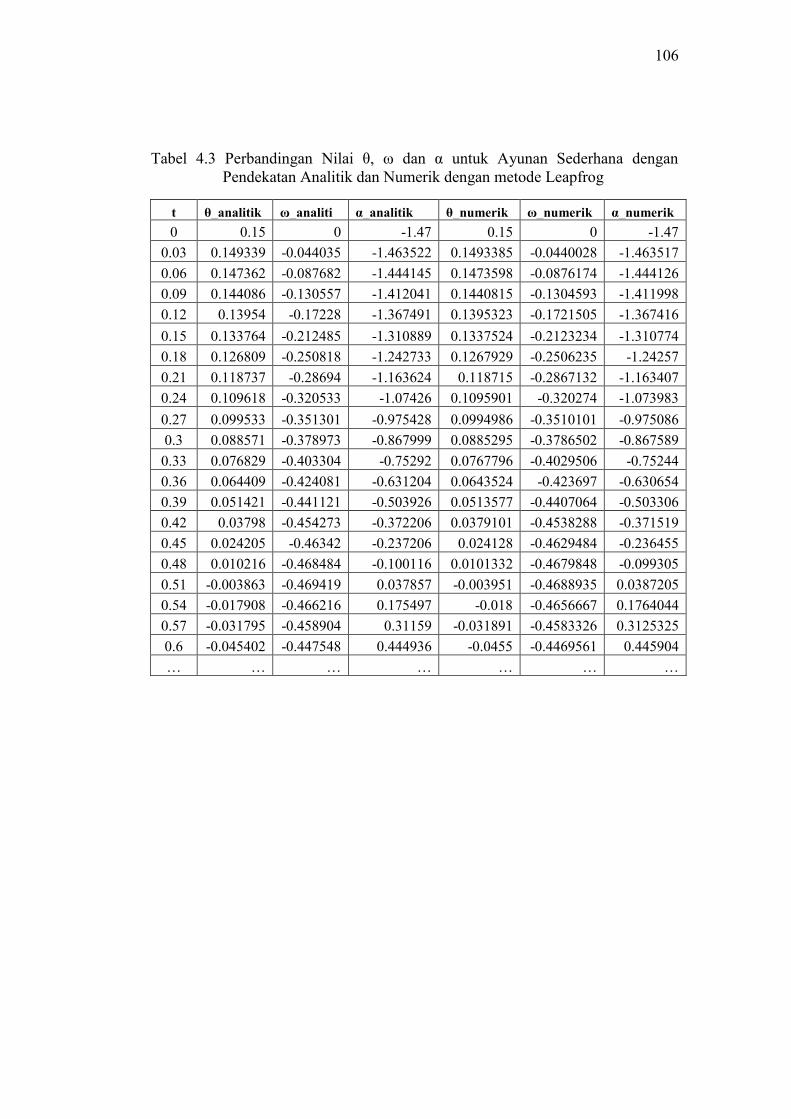
Tabel 4.3 Perbandingan Nilai θ, ω dan α untuk Ayunan Sederhana dengan
Pendekatan Analitik dan Numerik dengan metode Leapfrog
t θ_analitik ω_analiti α_analitik θ_numerik ω_numerik α_numerik
0 0.15 0 -1.47 0.15 0 -1.47
0.03 0.149339 -0.044035 -1.463522 0.1493385 -0.0440028 -1.463517
0.06 0.147362 -0.087682 -1.444145 0.1473598 -0.0876174 -1.444126
0.09 0.144086 -0.130557 -1.412041 0.1440815 -0.1304593 -1.411998
0.12 0.13954 -0.17228 -1.367491 0.1395323 -0.1721505 -1.367416
0.15 0.133764 -0.212485 -1.310889 0.1337524 -0.2123234 -1.310774
0.18 0.126809 -0.250818 -1.242733 0.1267929 -0.2506235 -1.24257
0.21 0.118737 -0.28694 -1.163624 0.118715 -0.2867132 -1.163407
0.24 0.109618 -0.320533 -1.07426 0.1095901 -0.320274 -1.073983
0.27 0.099533 -0.351301 -0.975428 0.0994986 -0.3510101 -0.975086
0.3 0.088571 -0.378973 -0.867999 0.0885295 -0.3786502 -0.867589
0.33 0.076829 -0.403304 -0.75292 0.0767796 -0.4029506 -0.75244
0.36 0.064409 -0.424081 -0.631204 0.0643524 -0.423697 -0.630654
0.39 0.051421 -0.441121 -0.503926 0.0513577 -0.4407064 -0.503306
0.42 0.03798 -0.454273 -0.372206 0.0379101 -0.4538288 -0.371519
0.45 0.024205 -0.46342 -0.237206 0.024128 -0.4629484 -0.236455
0.48 0.010216 -0.468484 -0.100116 0.0101332 -0.4679848 -0.099305
0.51 -0.003863 -0.469419 0.037857 -0.003951 -0.4688935 0.0387205
0.54 -0.017908 -0.466216 0.175497 -0.018 -0.4656667 0.1764044
0.57 -0.031795 -0.458904 0.31159 -0.031891 -0.4583326 0.3125325
0.6 -0.045402 -0.447548 0.444936 -0.0455 -0.4469561 0.445904
… … … … … … …
107
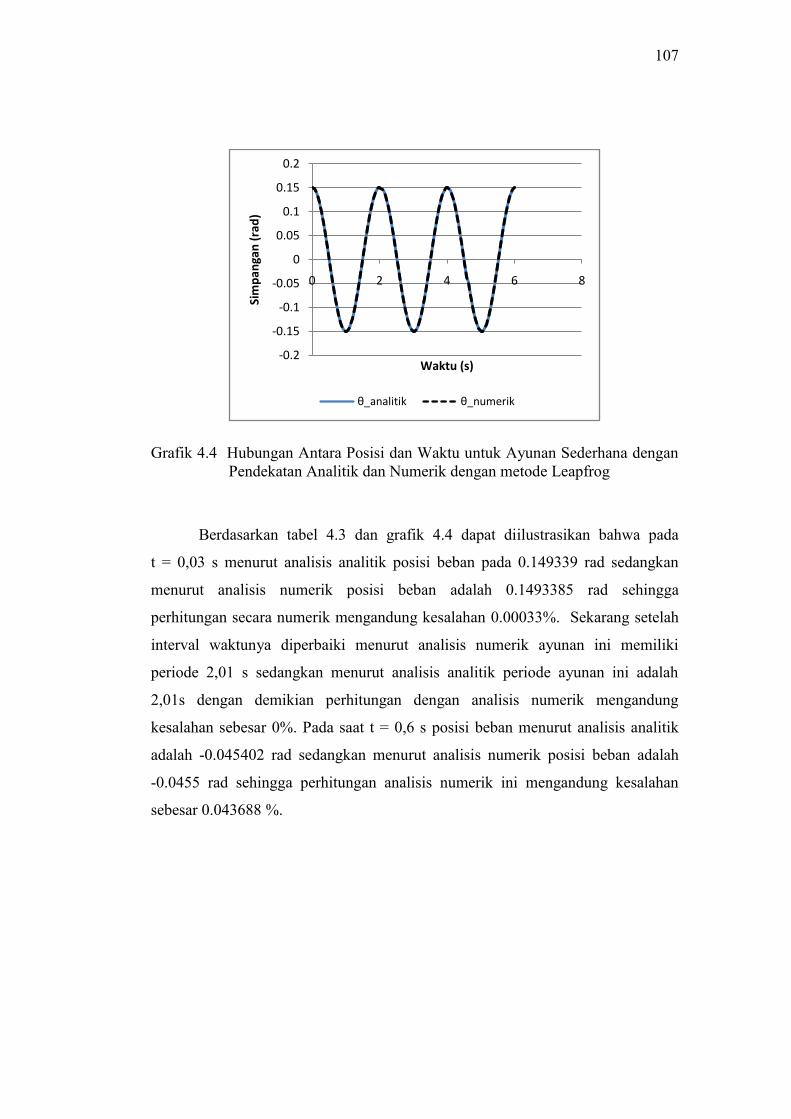
Grafik 4.4 Hubungan Antara Posisi dan Waktu untuk Ayunan Sederhana dengan
Pendekatan Analitik dan Numerik dengan metode Leapfrog
Berdasarkan tabel 4.3 dan grafik 4.4 dapat diilustrasikan bahwa pada
t = 0,03 s menurut analisis analitik posisi beban pada 0.149339 rad sedangkan
menurut analisis numerik posisi beban adalah 0.1493385 rad sehingga
perhitungan secara numerik mengandung kesalahan 0.00033%. Sekarang setelah
interval waktunya diperbaiki menurut analisis numerik ayunan ini memiliki
periode 2,01 s sedangkan menurut analisis analitik periode ayunan ini adalah
2,01s dengan demikian perhitungan dengan analisis numerik mengandung
kesalahan sebesar 0%. Pada saat t = 0,6 s posisi beban menurut analisis analitik
adalah -0.045402 rad sedangkan menurut analisis numerik posisi beban adalah
-0.0455 rad sehingga perhitungan analisis numerik ini mengandung kesalahan
sebesar 0.043688 %.
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0 2 4 6 8
Sim
pan
gan
(ra
d)
Waktu (s)
θ_analitik θ_numerik
108
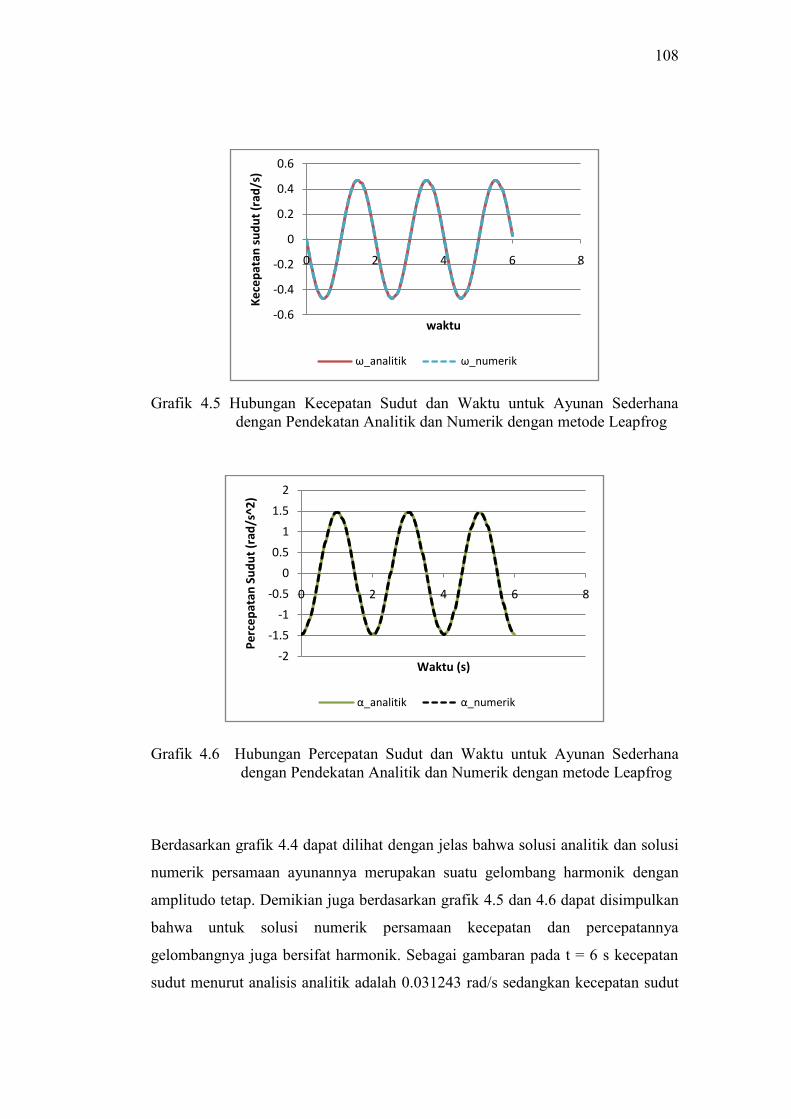
Grafik 4.5 Hubungan Kecepatan Sudut dan Waktu untuk Ayunan Sederhana
dengan Pendekatan Analitik dan Numerik dengan metode Leapfrog
Grafik 4.6 Hubungan Percepatan Sudut dan Waktu untuk Ayunan Sederhana
dengan Pendekatan Analitik dan Numerik dengan metode Leapfrog
Berdasarkan grafik 4.4 dapat dilihat dengan jelas bahwa solusi analitik dan solusi
numerik persamaan ayunannya merupakan suatu gelombang harmonik dengan
amplitudo tetap. Demikian juga berdasarkan grafik 4.5 dan 4.6 dapat disimpulkan
bahwa untuk solusi numerik persamaan kecepatan dan percepatannya
gelombangnya juga bersifat harmonik. Sebagai gambaran pada t = 6 s kecepatan
sudut menurut analisis analitik adalah 0.031243 rad/s sedangkan kecepatan sudut
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 2 4 6 8K
ece
pat
an s
ud
ut
(rad
/s)
waktu
ω_analitik ω_numerik
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 2 4 6 8
Pe
rce
pat
an S
ud
ut
(rad
/s^2
)
Waktu (s)
α_analitik α_numerik
109
menurut analisis numeriknya adalah 0.0279745 rad/s sehingga perhitungan
analisis numeriknya mengandung kesalahan 10%. Dengan demikian dapat
disimpulkan bahwa dengan menggunakan metode Leapfrog dapat menghasilkan
suatu solusi numerik yang cukup teliti.
Pertanyaan 4.1
Berdasarkan contoh 4.1, jawablah pertanyaan-pertanyaan berikut!
1. Berapakah periode bandul tersebut? Bandingkan nilai periode yang diperoleh
berdasarkan metode analitik dan numerik!
2. Bagaimanakah pengaruh nilai Increment waktu (∆t) terhadap grafik numerik
jika dibandingkan dengan grafik analitiknya?
3. Bagaimanakah pengaruh perubahan nilai ω0 terhadap grafik numerik jika
dibandingkan dengan grafik analitiknya?
4. Analog dengan soal di atas, jika nilai ∆t divariasikan pada nilai 0,01 s, 0,1 s
dan 1s pada nilai Increment (∆t) berapakah grafik numeriknya menunjukkan
bentuk yang hampir sama dengan grafik dengan pendekatan analitik?
5. Bagaimanakah pengaruh panjang tali terhadap periode getarannya?
6. Bagaimanakah pengaruh amplitudo terhadap periode getarannya?
4.2 Gerak Harmonik Sederhana
4.2.1 Analisis Gerak Harmonik Sederhana dengan Pendekatan Analitik
4.2.1.1 Analisis Gerak Harmonik Sederhana dengan Pendekatan Analitik
pada Beban dan Pegas pada Posisi Horizontal
Gerak harmonik sederhana merupakan salah satu contoh gerak osilasi yang
sangat penting dalam fisika. Sebagai contoh gerak harmonis sederhana adalah
sebuah beban bermassa m yang diikatkan pada pegas ideal dengan konstanta
pegas k dimana beban tesebut bebas bergerak di atas permukaan horizontal tanpa
gesekan.

110
Gambar 4.2 Pegas dalam Posisi Horizontal
Sesuai hukum Hooke, jika beban digeser k ke kanan, maka gaya yang dilakukan
oleh pegas mengarah ke kiri. Jika beban bergeser ke arah kiri, maka gaya yang
akan dilakukan oleh pegas mengarah ke kanan dengan persamaan F= -kx. Pada
keadaan ini, gaya yang dilakukan pegas disebut sebagai gaya pemulih dan gerak
beban yang berisolasi ini adalah gerak harmonik sederhana. Untuk menganalisis
gerakan ini, maka dipergunakan hukum kedua Newton yaitu
F= m a = -kx …(4.22)
dengan mengingat bahwa 𝑑2𝑥
𝑑𝑡 2 = 𝑎 maka persamaan (4.22) dapat dituliskan
sebagai
𝑚𝑑2𝑥
𝑑𝑡 2 = −𝑘𝑥 …(4.23)
atau
𝑑2𝑥
𝑑𝑡 2+
𝑘
𝑚𝑥 = 0 …(4.24)
dengan solusi umum persamaan (4.24) adalah
𝑥 = 𝐴 𝑠𝑖𝑛 ( ω 𝑡 + ϕ ) …(4.25)
apabila 𝜙 = 𝛿 +𝜋
2 maka persamaan (4.25) dapat dituliskan sebagai
𝑥 = 𝐴 𝑐𝑜𝑠 ( ω 𝑡 + δ ) …(4.26)
𝑣 =𝑑𝑥
𝑑𝑡= −𝐴𝜔 Sin (ωt + δ) …(4.27)
F
F
x
x
x = 0 F= 0

111
a= 𝑑2𝑥
𝑑𝑡 2 = −𝐴ω2 𝐶𝑜𝑠 (ω𝑡 + δ) …(4.28)
dimana 𝜔 = km
Berdasarkan definisi bahwa 𝜔 =2𝜋
𝑇 maka periode gerak harmonik sederhana
dapat dinyatakan dengan persamaan
𝑇 = 2𝜋 𝑚
𝑘 …(4.29)
Dengan mengingat definisi 𝑓 = 1
𝑇 maka frekuensi osilasinya dapat dinyatakan
dengan
𝑓 =1
2𝜋
𝑘
𝑚 …(4.30)
dengan:
= fase awal
A = amplitudo maksimum (m)
𝛿 = tetapan
m = masa beban (kg)
k = konstanta pegas (N/m)
berdasarkan persamaan (4.26) sampai (4.28) dapat disimpulkan bahwa gerak
harmoniknya dapat digambarkan sebagai fungsi gelombang sinusoidal terhadap
waktu selamanya tanpa mengalami peluruhan dengan asumsi bahwa gesekan
dapat diabaikan. Kecepatan sudut osilasi ( merupakan fungsi panjang tali dan k
tetapi tidak tergantung pada m dan amplitudo geraknya.

112
4.2.1.2 Analisis Gerak Harmonik Sederhana dengan Pendekatan Analitik
pada Beban dan Pegas Vertikal dengan Posisi Vertikal
Misalkan sebuah beban bermasa m tergantung pada sebuah pegas yang
memiliki panjang l, kostanta pegas k dan masa pegas dapat diabaikan seperti
gambar berikut.
Gambar 4.3 Pegas dalam Posisi Vertikal
Jika beban digantungkan pada pegas maka pegas akan memanjang sebesar y0 dari
posisi setimbang. Pada keadaan ini, pegas akan memberikan gaya pemulih pada
beban sebesar
𝐹1 = −𝑘 𝑦0
𝑦0 = −𝐹1
𝑘 …(4.31)
sedangkan pada beban bekerja gaya berat sebesar mg. Apabila gaya ke bawah
dianggap positif maka persamaan kesetimbangannya dapat dinyatakan dengan
persamaan
𝑚𝑔 − 𝑘 𝑦0 = 0
𝑦0 =𝑚𝑔
𝑘
apabila beban ditarik ke bawah sepanjang y dari y0 maka besarnya gaya pemulih
yang diberikan pegas terhadap beban adalah
𝐹2 = −𝑘 (𝑦 + 𝑦0) …(4.32)
dengan mensubstitusikan persamaan (4.31) dalam persamaan (4.32) diperoleh
𝐹2 = −𝑚𝑔 − 𝑘𝑦
l
y0
y

113
dengan mengaplikasikan hukum Newton kedua maka gaya total yang bekerja
pada beban dinyatakan dengan persamaan
𝑚𝑑2𝑦
𝑑𝑡 2= −𝑘𝑦
𝑑2𝑦
𝑑𝑡 2 +𝑘
𝑚𝑦 = 0 …(4.33)
Solusi umum persamaan differensial (4.33) adalah
𝑦 = 𝐴 cos(𝜔𝑡 + 𝛿) …(4.34)
dengan 𝜔 =𝑘
𝑚
berdasarkan definisi 𝜔 =2𝜋
𝑇 maka periode gerak harmoniknya adalah
𝑇 = 2𝜋 𝑚
𝑘 …(4.36)
dengan mensubstitusikan 𝑦0 =𝑚𝑔
𝑘 ke dalam persamaan (4.36) akan diperoleh
𝑇 = 2𝜋 𝑦0
𝑔 …(4.37)
Persamaan (4.36) dan (4.37) dapat digunakan untuk menentukan periode gerak
harmonik, namun demikian dengan menggunakan persamaan (4.37) kita dapat
menentukan periode gerak harmonik tanpa harus mengetahui nilai konstanta pegas
dan masa bebannya. Adapun langkah yang perlu dilakukan untuk menentukan
kecepatan dan percepatannya adalah dengan menurunkan persamaan (4.34)
terhadap t.
4.2.2 Analisis Gerak Harmonik Sederhana dengan Pendekatan Numerik
4.2.2.1 Analisis Gerak Harmonik Sederhana dengan Pendekatan Numerik
pada Beban dan Pegas dengan Posisi Horizontal
Berdasarkan definisi bahwa percepatan merupakan turunan kecepatan
terhadap waktu ( 𝑑2𝑥
𝑑𝑡 2=
𝑑𝑣
𝑑𝑡) maka persamaan (4.23) dapat disusun kembali menjadi
𝑑𝑣
𝑑𝑡= −
𝑘
𝑚𝑥 …(4.38)
dengan mempergunakan teori Euler maka
𝑑𝑣
𝑑𝑡= limΔ𝑡→0
𝑣 𝑡+Δ𝑡 −𝑣(𝑡)
Δ𝑡= −
𝑘
𝑚𝑥

114
sehingga
𝑣 𝑡+Δ𝑡 −𝑣(𝑡)
Δ𝑡= −
𝑘
𝑚𝑥 …(4.39)
atau
𝑣 𝑡 + Δ𝑡 = 𝑣 𝑡 −𝑘
𝑚𝑥(𝑡) Δ𝑡
Secara umum persamaan (4.39 ) dapat dituliskan sebagai
𝑣𝑖+1 = 𝑣𝑖 − 𝑘
𝑚 𝑥 𝑖Δ𝑡 …(4.40)
dengan cara yang sama berdasarkan definisi bahwa kecepatan merupakan turunan
posisi terhadap waktu
𝑑𝑥
𝑑𝑡= 𝑣
Apabila persamaan di atas di uraikan dengan teori Euler akan diperoleh
𝑥 𝑡 + Δ𝑡 = 𝑥(𝑡) + 𝑣(𝑡) Δ𝑡
secara umum persamaan di atas dapat dinyatakan sebagai
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖 Δ𝑡 …(4.41)
dengan:
v = kecepatan linear (m/s)
k = konstanta pegas (N/m)
∆t = selang waktu (Increment )
vi = kecepatan linear pada t = t
vi+1 = kecepatan linear pada t = t+∆t
xi = posisi beban pada t = t
xi+1 = posisi beban pada t = t+∆t
Contoh 4.2
Suatu sistem terdiri dari pegas dengan tetapan 2 N/m dengan beban seberat 2 kg
mula-mula dalam keadaan diam kemudian beban ditarik sepanjang 10 cm dalam
arah horizontal kemudian dilepaskan. Analisislah gerakannya dengan
115
menggunakan Spreadsheet melalui pendekatan analisis analitik dan analisis
numerik (catatan bahwa g = 9,8 dan ∆t = 0,1).
Penyelesaian
Sebagai langkah awal untuk menyelesaikan soal di atas adalah dengan
mendeklarasikan variabel-variabel persamaan geraknya seperti dalam tabel
berikut.
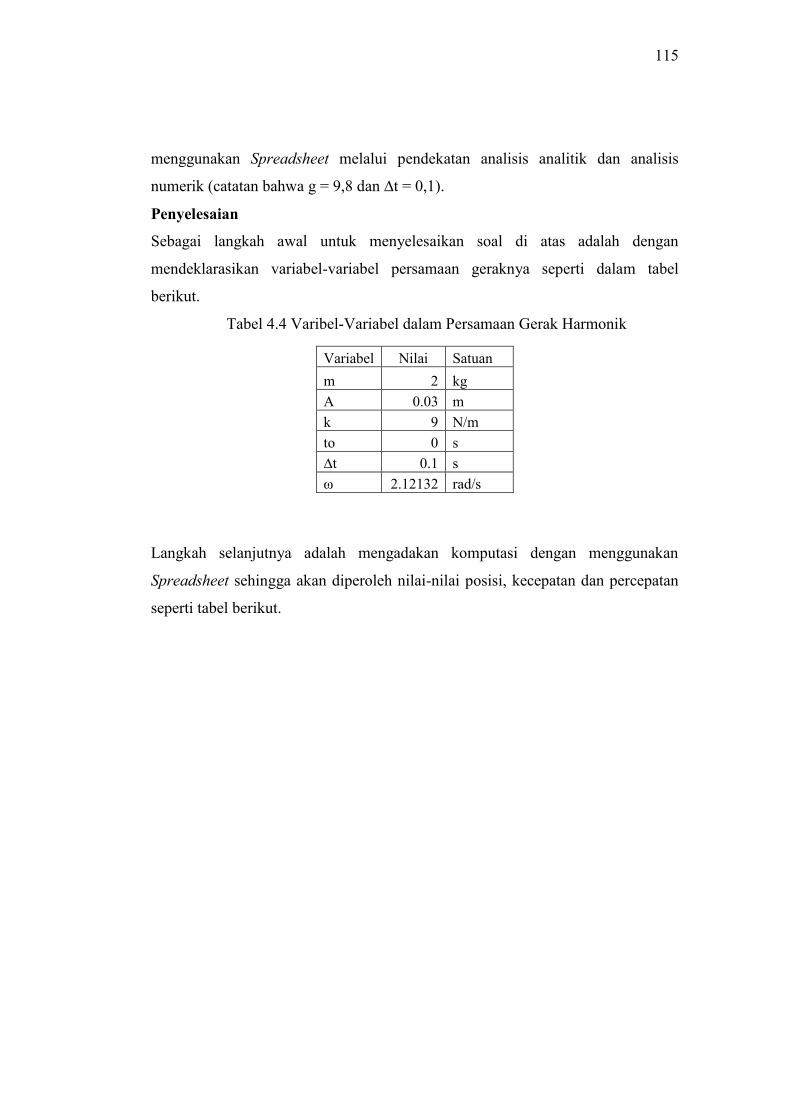
Tabel 4.4 Varibel-Variabel dalam Persamaan Gerak Harmonik
Variabel Nilai Satuan
m 2 kg
A 0.03 m
k 9 N/m
to 0 s
∆t 0.1 s
ω 2.12132 rad/s
Langkah selanjutnya adalah mengadakan komputasi dengan menggunakan
Spreadsheet sehingga akan diperoleh nilai-nilai posisi, kecepatan dan percepatan
seperti tabel berikut.
116
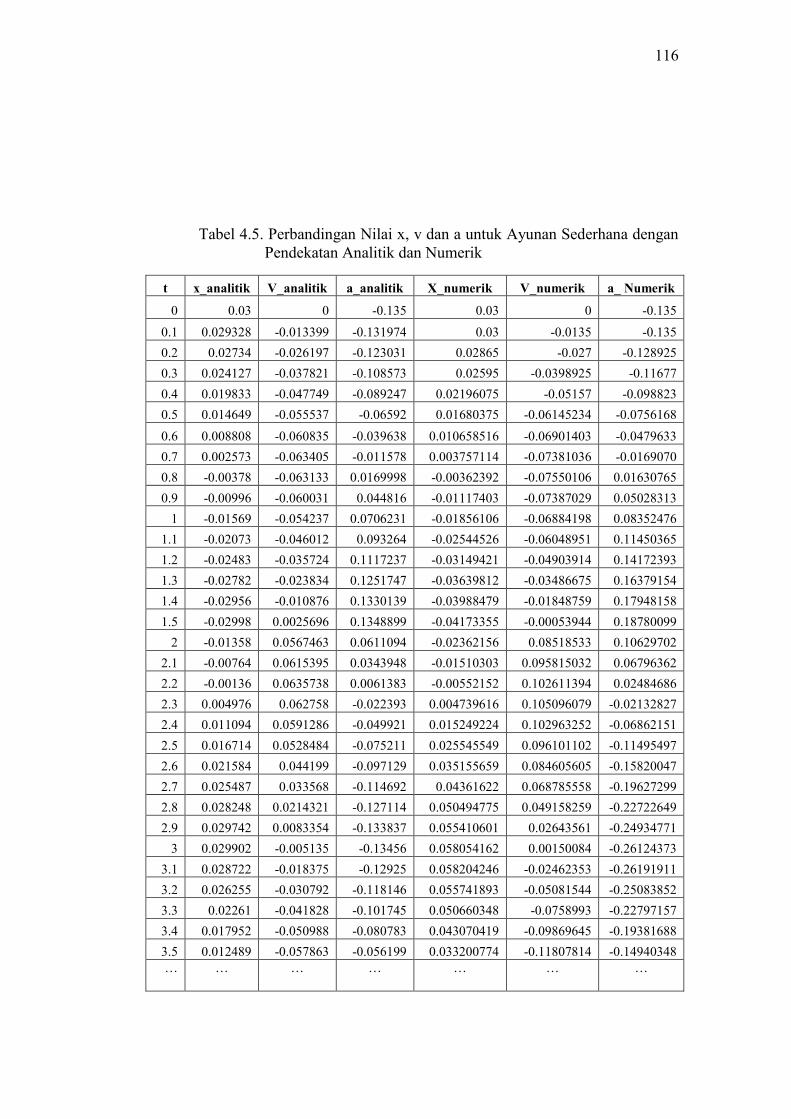
Tabel 4.5. Perbandingan Nilai x, v dan a untuk Ayunan Sederhana dengan
Pendekatan Analitik dan Numerik
t x_analitik V_analitik a_analitik X_numerik V_numerik a_ Numerik
0 0.03 0 -0.135 0.03 0 -0.135
0.1 0.029328 -0.013399 -0.131974 0.03 -0.0135 -0.135
0.2 0.02734 -0.026197 -0.123031 0.02865 -0.027 -0.128925
0.3 0.024127 -0.037821 -0.108573 0.02595 -0.0398925 -0.11677
0.4 0.019833 -0.047749 -0.089247 0.02196075 -0.05157 -0.098823
0.5 0.014649 -0.055537 -0.06592 0.01680375 -0.06145234 -0.0756168
0.6 0.008808 -0.060835 -0.039638 0.010658516 -0.06901403 -0.0479633
0.7 0.002573 -0.063405 -0.011578 0.003757114 -0.07381036 -0.0169070
0.8 -0.00378 -0.063133 0.0169998 -0.00362392 -0.07550106 0.01630765
0.9 -0.00996 -0.060031 0.044816 -0.01117403 -0.07387029 0.05028313
1 -0.01569 -0.054237 0.0706231 -0.01856106 -0.06884198 0.08352476
1.1 -0.02073 -0.046012 0.093264 -0.02544526 -0.06048951 0.11450365
1.2 -0.02483 -0.035724 0.1117237 -0.03149421 -0.04903914 0.14172393
1.3 -0.02782 -0.023834 0.1251747 -0.03639812 -0.03486675 0.16379154
1.4 -0.02956 -0.010876 0.1330139 -0.03988479 -0.01848759 0.17948158
1.5 -0.02998 0.0025696 0.1348899 -0.04173355 -0.00053944 0.18780099
2 -0.01358 0.0567463 0.0611094 -0.02362156 0.08518533 0.10629702
2.1 -0.00764 0.0615395 0.0343948 -0.01510303 0.095815032 0.06796362
2.2 -0.00136 0.0635738 0.0061383 -0.00552152 0.102611394 0.02484686
2.3 0.004976 0.062758 -0.022393 0.004739616 0.105096079 -0.02132827
2.4 0.011094 0.0591286 -0.049921 0.015249224 0.102963252 -0.06862151
2.5 0.016714 0.0528484 -0.075211 0.025545549 0.096101102 -0.11495497
2.6 0.021584 0.044199 -0.097129 0.035155659 0.084605605 -0.15820047
2.7 0.025487 0.033568 -0.114692 0.04361622 0.068785558 -0.19627299
2.8 0.028248 0.0214321 -0.127114 0.050494775 0.049158259 -0.22722649
2.9 0.029742 0.0083354 -0.133837 0.055410601 0.02643561 -0.24934771
3 0.029902 -0.005135 -0.13456 0.058054162 0.00150084 -0.26124373
3.1 0.028722 -0.018375 -0.12925 0.058204246 -0.02462353 -0.26191911
3.2 0.026255 -0.030792 -0.118146 0.055741893 -0.05081544 -0.25083852
3.3 0.02261 -0.041828 -0.101745 0.050660348 -0.0758993 -0.22797157
3.4 0.017952 -0.050988 -0.080783 0.043070419 -0.09869645 -0.19381688
3.5 0.012489 -0.057863 -0.056199 0.033200774 -0.11807814 -0.14940348
… … … … … … …
117
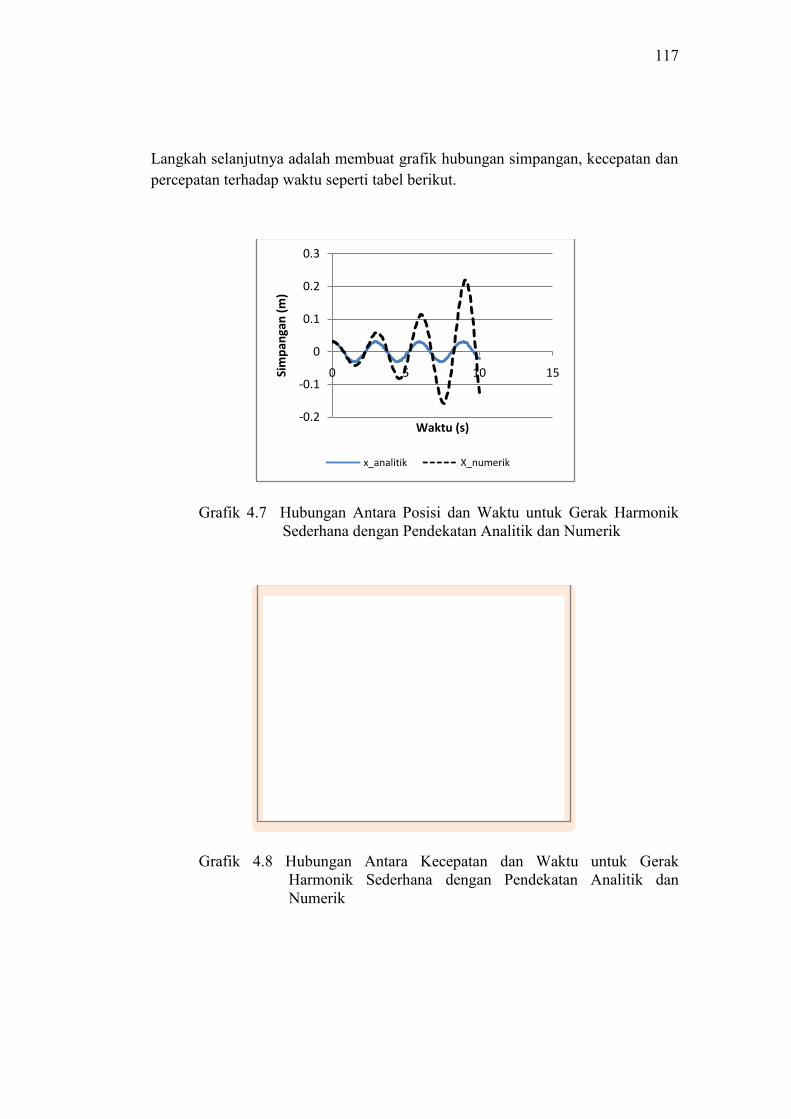
Langkah selanjutnya adalah membuat grafik hubungan simpangan, kecepatan dan
percepatan terhadap waktu seperti tabel berikut.
Grafik 4.7 Hubungan Antara Posisi dan Waktu untuk Gerak Harmonik
Sederhana dengan Pendekatan Analitik dan Numerik
Grafik 4.8 Hubungan Antara Kecepatan dan Waktu untuk Gerak
Harmonik Sederhana dengan Pendekatan Analitik dan
Numerik
-0.2
-0.1
0
0.1
0.2
0.3
0 5 10 15Sim
pan
gan
(m
)
Waktu (s)
x_analitik X_numerik
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0 5 10 15
Ke
cep
atan
(m
/s)
Waktu (s)
V_analitik V_numerik
118
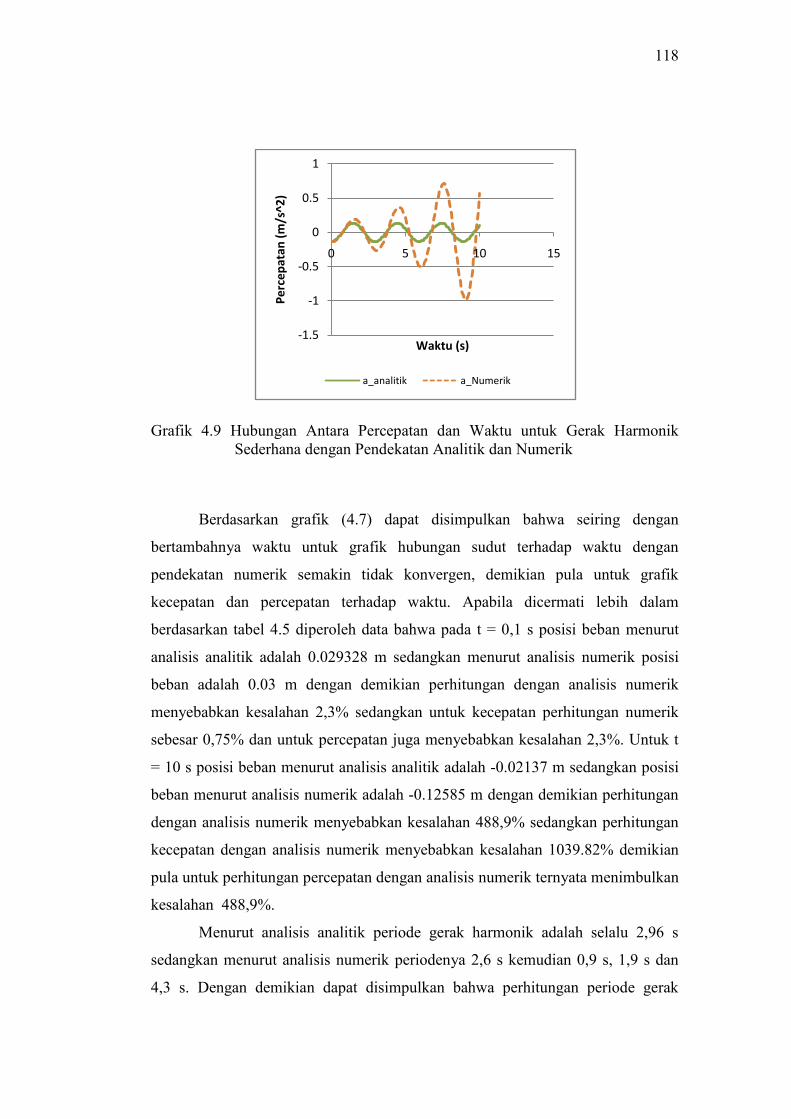
Grafik 4.9 Hubungan Antara Percepatan dan Waktu untuk Gerak Harmonik
Sederhana dengan Pendekatan Analitik dan Numerik
Berdasarkan grafik (4.7) dapat disimpulkan bahwa seiring dengan
bertambahnya waktu untuk grafik hubungan sudut terhadap waktu dengan
pendekatan numerik semakin tidak konvergen, demikian pula untuk grafik
kecepatan dan percepatan terhadap waktu. Apabila dicermati lebih dalam
berdasarkan tabel 4.5 diperoleh data bahwa pada t = 0,1 s posisi beban menurut
analisis analitik adalah 0.029328 m sedangkan menurut analisis numerik posisi
beban adalah 0.03 m dengan demikian perhitungan dengan analisis numerik
menyebabkan kesalahan 2,3% sedangkan untuk kecepatan perhitungan numerik
sebesar 0,75% dan untuk percepatan juga menyebabkan kesalahan 2,3%. Untuk t
= 10 s posisi beban menurut analisis analitik adalah -0.02137 m sedangkan posisi
beban menurut analisis numerik adalah -0.12585 m dengan demikian perhitungan
dengan analisis numerik menyebabkan kesalahan 488,9% sedangkan perhitungan
kecepatan dengan analisis numerik menyebabkan kesalahan 1039.82% demikian
pula untuk perhitungan percepatan dengan analisis numerik ternyata menimbulkan
kesalahan 488,9%.
Menurut analisis analitik periode gerak harmonik adalah selalu 2,96 s
sedangkan menurut analisis numerik periodenya 2,6 s kemudian 0,9 s, 1,9 s dan
4,3 s. Dengan demikian dapat disimpulkan bahwa perhitungan periode gerak
-1.5
-1
-0.5
0
0.5
1
0 5 10 15
Pe
rce
pat
an (
m/s
^2)
Waktu (s)
a_analitik a_Numerik

119
harmonik sederhana dengan metode Euler tidak dapat diterima karena periode
ayunan selalu berubah-ubah semakin lama semakin besar sedangkan menurut
analisis analitik periodenya selalu tetap.
Berdasarkan hasil-hasil tersebut maka disimpulkan bahwa perhitungan
kasus gerak harmonik sederhana dengan metode Euler tidak dapat dipakai
sehingga dibutuhkan metode numerik yang lain. Salah satu metode numerik yang
akan dipakai pada kesempatan ini adalah metode Euler-Cromer dimana metode ini
merupakan metode perbaikan dari metode Euler. Berdasarkan penjelasan bab II
tentang metode Euler-Cromer , maka kecepatan dan posisi beban dapat dinyatakan
dengan persamaan
𝑣𝑖+1 = 𝑣𝑖 −𝑘
𝑚 𝑥𝑖∆𝑡 ...(4.42)
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖+1 ∆𝑡 ...(4.43)
dengan membandingkan persamaan (4.40) sampai (4.41) dan persamaan ((4.42)
sampai (4.43) disimpulkan bahwa apabila menggunakan metode Euler nilai v dan
x sebelumnya dipakai untuk menghitung nilai v dan x yang baru sedangkan
dengan metode Euler-Cromer nilai v dan x sebelumnya dipakai untuk menghitung
nilai v yang baru akan tetapi nilai v yang baru dipergunakan untuk menghitung
nilai x yang baru. Dengan demikian apabila soal (4.2) dikerjakan dengan metode
Euler-Cromer akan diperoleh hasil komputasi seperti dalam tabel berikut.
120
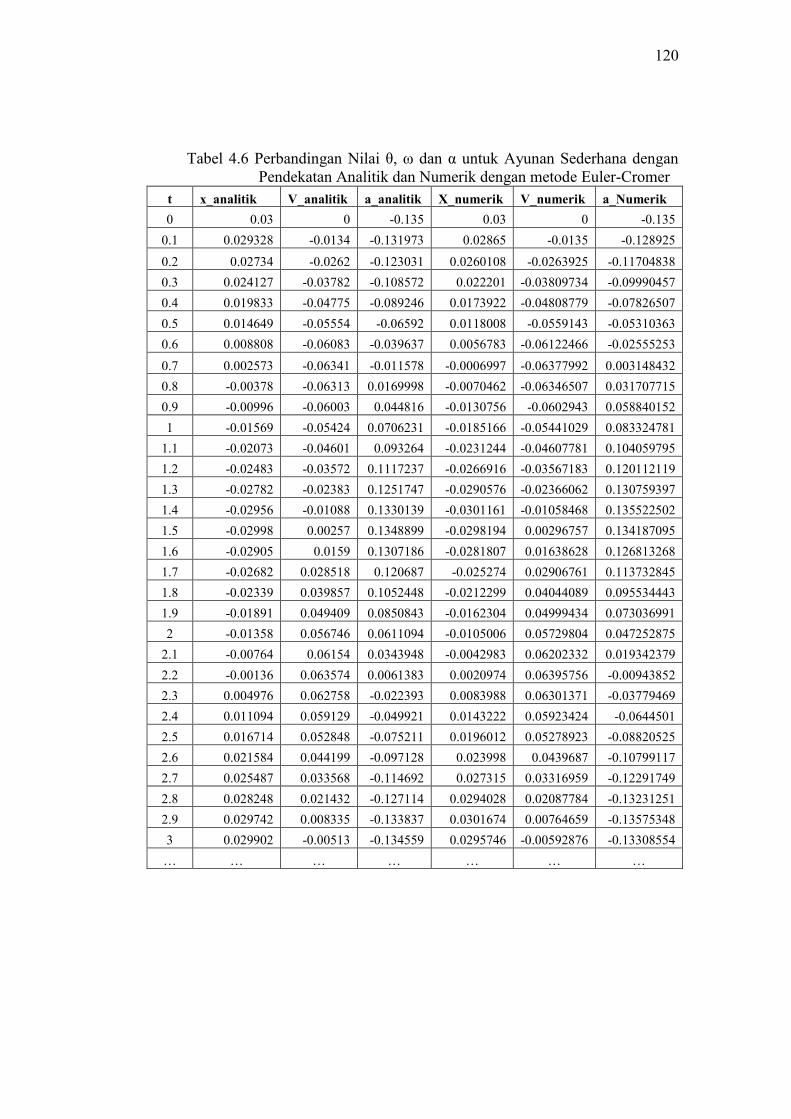
Tabel 4.6 Perbandingan Nilai θ, ω dan α untuk Ayunan Sederhana dengan
Pendekatan Analitik dan Numerik dengan metode Euler-Cromer
t x_analitik V_analitik a_analitik X_numerik V_numerik a_Numerik
0 0.03 0 -0.135 0.03 0 -0.135
0.1 0.029328 -0.0134 -0.131973 0.02865 -0.0135 -0.128925
0.2 0.02734 -0.0262 -0.123031 0.0260108 -0.0263925 -0.11704838
0.3 0.024127 -0.03782 -0.108572 0.022201 -0.03809734 -0.09990457
0.4 0.019833 -0.04775 -0.089246 0.0173922 -0.04808779 -0.07826507
0.5 0.014649 -0.05554 -0.06592 0.0118008 -0.0559143 -0.05310363
0.6 0.008808 -0.06083 -0.039637 0.0056783 -0.06122466 -0.02555253
0.7 0.002573 -0.06341 -0.011578 -0.0006997 -0.06377992 0.003148432
0.8 -0.00378 -0.06313 0.0169998 -0.0070462 -0.06346507 0.031707715
0.9 -0.00996 -0.06003 0.044816 -0.0130756 -0.0602943 0.058840152
1 -0.01569 -0.05424 0.0706231 -0.0185166 -0.05441029 0.083324781
1.1 -0.02073 -0.04601 0.093264 -0.0231244 -0.04607781 0.104059795
1.2 -0.02483 -0.03572 0.1117237 -0.0266916 -0.03567183 0.120112119
1.3 -0.02782 -0.02383 0.1251747 -0.0290576 -0.02366062 0.130759397
1.4 -0.02956 -0.01088 0.1330139 -0.0301161 -0.01058468 0.135522502
1.5 -0.02998 0.00257 0.1348899 -0.0298194 0.00296757 0.134187095
1.6 -0.02905 0.0159 0.1307186 -0.0281807 0.01638628 0.126813268
1.7 -0.02682 0.028518 0.120687 -0.025274 0.02906761 0.113732845
1.8 -0.02339 0.039857 0.1052448 -0.0212299 0.04044089 0.095534443
1.9 -0.01891 0.049409 0.0850843 -0.0162304 0.04999434 0.073036991
2 -0.01358 0.056746 0.0611094 -0.0105006 0.05729804 0.047252875
2.1 -0.00764 0.06154 0.0343948 -0.0042983 0.06202332 0.019342379
2.2 -0.00136 0.063574 0.0061383 0.0020974 0.06395756 -0.00943852
2.3 0.004976 0.062758 -0.022393 0.0083988 0.06301371 -0.03779469
2.4 0.011094 0.059129 -0.049921 0.0143222 0.05923424 -0.0644501
2.5 0.016714 0.052848 -0.075211 0.0196012 0.05278923 -0.08820525
2.6 0.021584 0.044199 -0.097128 0.023998 0.0439687 -0.10799117
2.7 0.025487 0.033568 -0.114692 0.027315 0.03316959 -0.12291749
2.8 0.028248 0.021432 -0.127114 0.0294028 0.02087784 -0.13231251
2.9 0.029742 0.008335 -0.133837 0.0301674 0.00764659 -0.13575348
3 0.029902 -0.00513 -0.134559 0.0295746 -0.00592876 -0.13308554
… … … … … … …
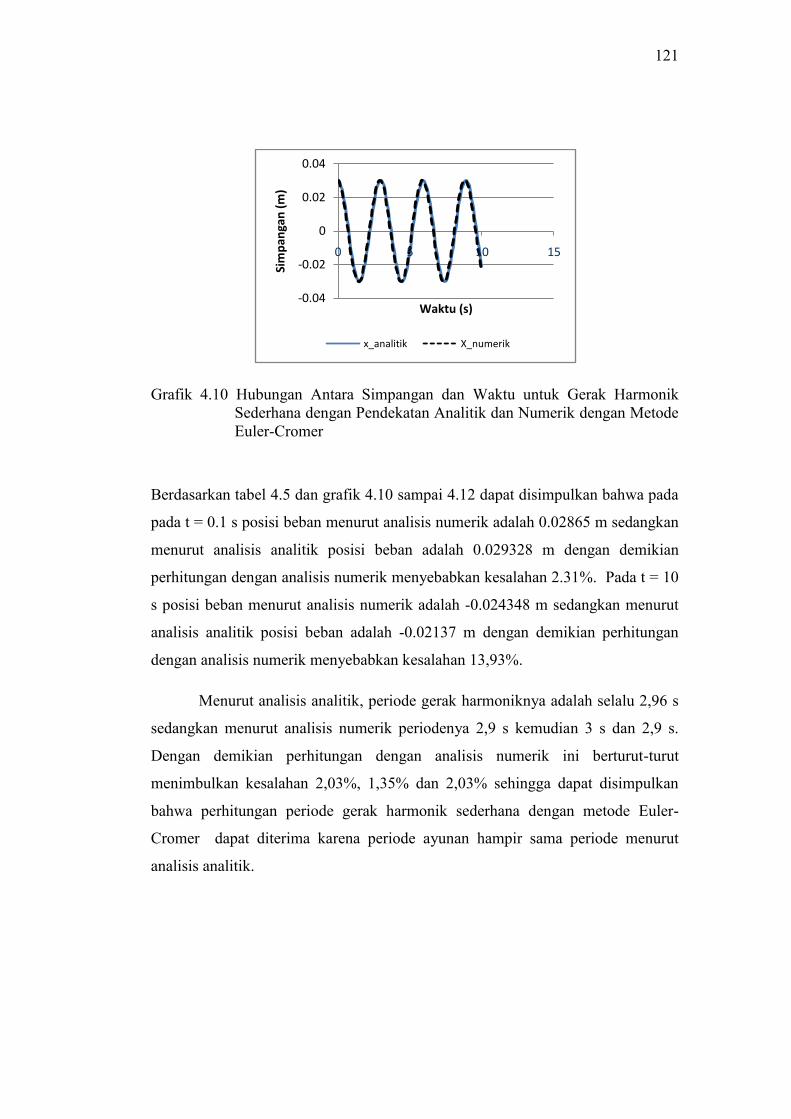
121
Grafik 4.10 Hubungan Antara Simpangan dan Waktu untuk Gerak Harmonik
Sederhana dengan Pendekatan Analitik dan Numerik dengan Metode
Euler-Cromer
Berdasarkan tabel 4.5 dan grafik 4.10 sampai 4.12 dapat disimpulkan bahwa pada
pada t = 0.1 s posisi beban menurut analisis numerik adalah 0.02865 m sedangkan
menurut analisis analitik posisi beban adalah 0.029328 m dengan demikian
perhitungan dengan analisis numerik menyebabkan kesalahan 2.31%. Pada t = 10
s posisi beban menurut analisis numerik adalah -0.024348 m sedangkan menurut
analisis analitik posisi beban adalah -0.02137 m dengan demikian perhitungan
dengan analisis numerik menyebabkan kesalahan 13,93%.
Menurut analisis analitik, periode gerak harmoniknya adalah selalu 2,96 s
sedangkan menurut analisis numerik periodenya 2,9 s kemudian 3 s dan 2,9 s.
Dengan demikian perhitungan dengan analisis numerik ini berturut-turut
menimbulkan kesalahan 2,03%, 1,35% dan 2,03% sehingga dapat disimpulkan
bahwa perhitungan periode gerak harmonik sederhana dengan metode Euler-
Cromer dapat diterima karena periode ayunan hampir sama periode menurut
analisis analitik.
-0.04
-0.02
0
0.02
0.04
0 5 10 15
Sim
pan
gan
(m
)
Waktu (s)
x_analitik X_numerik
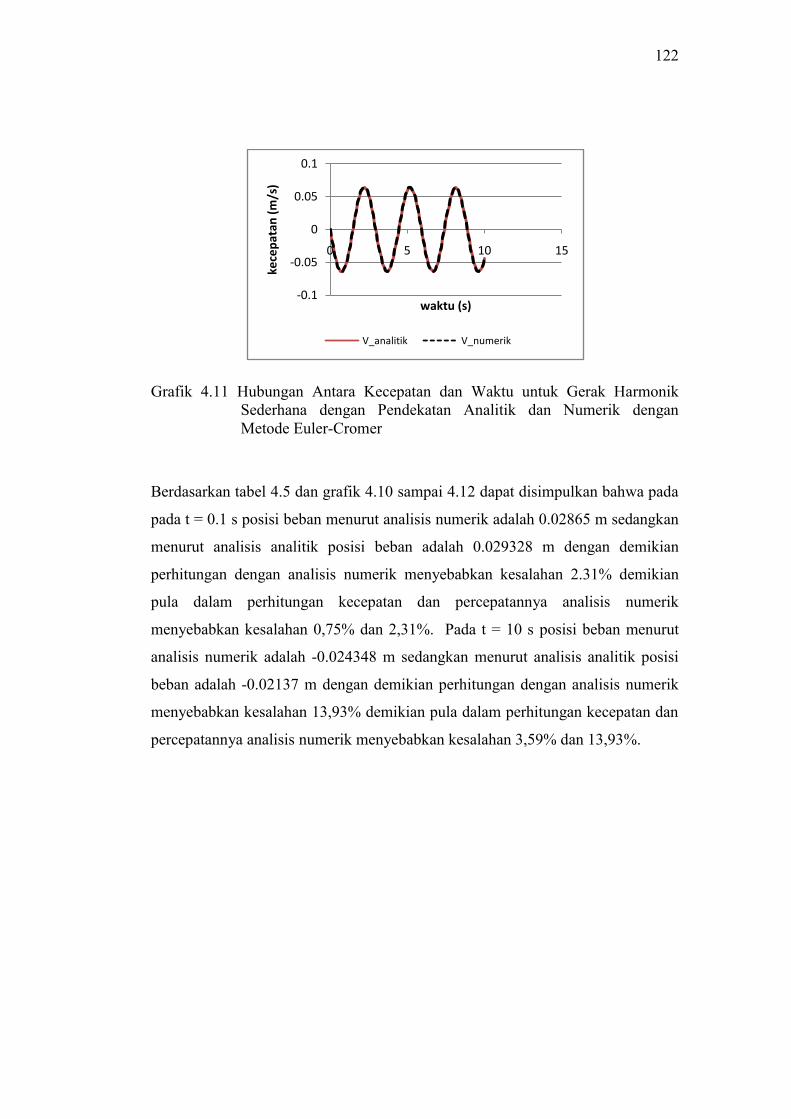
122
Grafik 4.11 Hubungan Antara Kecepatan dan Waktu untuk Gerak Harmonik
Sederhana dengan Pendekatan Analitik dan Numerik dengan
Metode Euler-Cromer
Berdasarkan tabel 4.5 dan grafik 4.10 sampai 4.12 dapat disimpulkan bahwa pada
pada t = 0.1 s posisi beban menurut analisis numerik adalah 0.02865 m sedangkan
menurut analisis analitik posisi beban adalah 0.029328 m dengan demikian
perhitungan dengan analisis numerik menyebabkan kesalahan 2.31% demikian
pula dalam perhitungan kecepatan dan percepatannya analisis numerik
menyebabkan kesalahan 0,75% dan 2,31%. Pada t = 10 s posisi beban menurut
analisis numerik adalah -0.024348 m sedangkan menurut analisis analitik posisi
beban adalah -0.02137 m dengan demikian perhitungan dengan analisis numerik
menyebabkan kesalahan 13,93% demikian pula dalam perhitungan kecepatan dan
percepatannya analisis numerik menyebabkan kesalahan 3,59% dan 13,93%.
-0.1
-0.05
0
0.05
0.1
0 5 10 15
kece
pat
an (
m/s
)
waktu (s)
V_analitik V_numerik

123
Grafik 4.12 Hubungan Antara Percepatan dan Waktu untuk Gerak Harmonik
Sederhana dengan Pendekatan Analitik dan Numerik dengan Metode
Euler-Cromer
Menurut analisis analitik periode gerak harmoniknya adalah selalu 2,96 s
sedangkan menurut analisis numerik periodenya 2,9 s kemudian 3 s dan 2,9 s.
Dengan demikian perhitungan dengan analisis numerik ini berturut-turut
menimbulkan kesalahan 2,03%, 1,35% dan 2,03% sehingga dapat disimpulkan
bahwa perhitungan periode gerak harmonik sederhana dengan metode Euler-
Cromer dapat diterima karena periode ayunan hampir sama periode menurut
analisis analitik.
Pertanyaan 4.2
Berdasarkan contoh soal 4.2, jawablah soal-soal berikut!
1. Jika nilai ∆t divariasikan pada nilai 0,01 s, 0,1 s dan 1s pada nilai increment
(∆t) berapakah periode gerak harmonik sederhana yang dihitung dengan
analisis numerik paling mendekati periode eksaknya?
2. Dengan menggunakan analisis analitik dan numerik selidikilah apakah periode
getaran pada pegas untuk gerak harmonik sederhana dipengaruhi oleh
amplitudonya?
3. Bagaimanakah pengaruh perubahan massa (m) terhadap periode gerak
harmonik sederhana? Apakah grafiknya dengan pendekatan numerik sesuai
dengan bentuk grafik dengan analisis analitik?
4. Bagaimanakah pengaruh perubahan nilai k terhadap periodenya?
-0.2
-0.1
0
0.1
0.2
0 5 10 15
Pe
rce
pat
an (
m/s
^2
Waktu (s)
a_analitik a_Numerik

124
4.2.2.2 Analisis Gerak Harmonik Sederhana dengan Pendekatan Numerik
pada Beban dan Pegas dengan Posisi Vertikal
Untuk kasus beban pada pegas vertikal ini karakteristiknya sama dengan
beban pada pegas horizontal sehingga untuk menganalisisnya digunakan teori
Euler-Cromer. Analog dengan kasus beban pada pegas horizontal maka solusi
numerik posisi dan kecepatan beban dirumuskan sebagai.
𝑣𝑖+1 = 𝑣𝑖 −𝑘
𝑚 𝑦𝑖∆𝑡 …(4.44)
𝑦𝑖+1 = 𝑦𝑖 + 𝑣𝑖+1 ∆𝑡 …(4.45)
dengan:
𝑣𝑖+1 = kecepatan beban pada waktu t = t +∆t
𝑣𝑖 = kecepatan beban pada waktu t = t
∆𝑡 = nilai Increment waktu (s)
4.2.3 Energi Gerak Harmonik Sederhana
Pada gerak harmonik sederhana berlaku hukum kekekalan energi sehingga
jumlah energinya selalu konstan. Hal ini berlaku jika tidak ada gaya disipatif yang
bekerja seperti adanya gaya gesek. Secara matematis persamaan energi untuk
gerak harmonik sederhana adalah
𝐸 = 𝐸𝑝 + 𝐸𝑘 …(4.46)
dimana Ep menyatakan energi potensial sedangkan Ek menyatakan energi
kinetik. Secara matematis besarnya energi potensial ini dirumuskan sebagai
𝐸𝑝 =1
2𝑘𝑥2 …(4.47)
dengan 𝑥 = 𝐴 𝑐𝑜𝑠 ( ω 𝑡 + δ ) Sehingga persamaan (4.47) dapat dituliskan
sebagai
𝐸𝑝 =1
2𝑘𝐴2 𝑐𝑜𝑠2 ( ω 𝑡 + δ ) …(4.48)
Karena cosines maksimum bernilai 1 maka besarnya energi potensial maksimum
adalah 𝐸𝑝 =1
2𝑘𝐴2. Secara umum besarnya energi kinetik gerak harmonik
sederhana dirumuskan sebagai

125
𝐸𝑘 =1
2 𝑚𝑣2 …(4.49)
dengan mengingat bahwa 𝑣 = −𝐴𝜔 Sin (ωt + δ) maka persamaan (4.49) dapat
dituliskan menjadi
𝐸𝑘 =1
2 𝑚𝐴2𝜔2 Sin2 (ωt + δ) …(4.50)
Karena 𝜔 = 𝑘
𝑚 maka persamaan (4.50) dapat dituliskan menjadi
𝐸𝑘 =1
2 𝑘𝐴2 Sin2 (ωt + δ) …(4.51)
Berdasarkan persamaan (4.50) dan (4.51) disimpulkan bahwa energi kinetik akan
bernilai maksimum 1
2 𝑚𝐴2𝜔2 dan
1
2 𝑘𝐴2. Besarnya energi mekanik adalah
𝐸𝑀 = 𝐸𝑝 + 𝐸𝑘
𝐸𝑀 =1
2𝑘𝐴2 …(4.52)
Dengan demikian dapat disimpulkan bahwa besarnya energi mekanis totalnya
adalah tetap, pada saat energi kinetiknya maksimum maka besarnya energi
potensial adalah nol dan sebaliknya.
Contoh 4.3
Suatu sistem terdiri dari pegas dengan tetapan 2 N/m dengan beban seberat 2 kg
mula-mula dalam keadaan diam kemudian beban ditarik sepanjang 10 cm dalam
arah horizontal kemudian dilepaskan. Analisislah gerakannya dengan
menggunakan Spreadsheet. Gunakan analitik dan metode metode Euler-Cromer
kemudian bandingkan hasil komputasinya (gunakan g= 9.8 m/s2 dan ∆t = 0,01s).
Penyelesaian
Langkah awal yang perlu kita lakukan untuk menyelesaikan soal tersebut adalah
dengan mendeklarasikan variable-variabel persamaanya dalam Spreadsheet
seperti tabel berikut.
Tabel 4.6 Variabel-Variabel Energi Gerak Harmonik Sederhana
Variabel Nilai Satuan
m 2 kg
A 0.1 m
k 2 N/m
to 0 s
∆t 0.01 s

126
ω 1 rad/s
Langkah selanjutnya adalah mengadakan komputasi dengan Spreadsheet untuk
menentukan nilai energi potensial, energi kinetik dan energi mekanik seperti tabel
berikut.
Tabel 4.7 Perbandingan Energi Potensial, Energi Kinetik dan Energi Mekanik
t Ep Ek EP +EK EM
0 0.01000 0.00000 0.01000 0.01
0.01 0.01000 0.00000 0.01000 0.01
0.02 0.00999 0.00000 0.01000 0.01
0.03 0.00999 0.00001 0.01000 0.01
0.04 0.00998 0.00002 0.01000 0.01
0.05 0.00997 0.00002 0.01000 0.01
0.06 0.00996 0.00004 0.00999 0.01
0.07 0.00994 0.00005 0.00999 0.01
0.08 0.00993 0.00006 0.00999 0.01
0.09 0.00991 0.00008 0.00999 0.01
0.1 0.00989 0.00010 0.00999 0.01
0.11 0.00987 0.00012 0.00999 0.01
0.12 0.00984 0.00014 0.00999 0.01
0.13 0.00982 0.00017 0.00999 0.01
0.14 0.00979 0.00019 0.00999 0.01
0.15 0.00976 0.00022 0.00999 0.01
0.16 0.00973 0.00025 0.00998 0.01
0.17 0.00970 0.00029 0.00998 0.01
0.18 0.00966 0.00032 0.00998 0.01
0.19 0.00962 0.00036 0.00998 0.01
0.2 0.00959 0.00039 0.00998 0.01
0.21 0.00955 0.00043 0.00998 0.01
0.22 0.00950 0.00048 0.00998 0.01
0.23 0.00946 0.00052 0.00998 0.01
0.24 0.00941 0.00057 0.00998 0.01
0.25 0.00936 0.00061 0.00998 0.01
0.26 0.00931 0.00066 0.00998 0.01
0.27 0.00926 0.00071 0.00997 0.01
0.28 0.00921 0.00076 0.00997 0.01
0.29 0.00915 0.00082 0.00997 0.01
0.3 0.00910 0.00087 0.00997 0.01
… … … … …
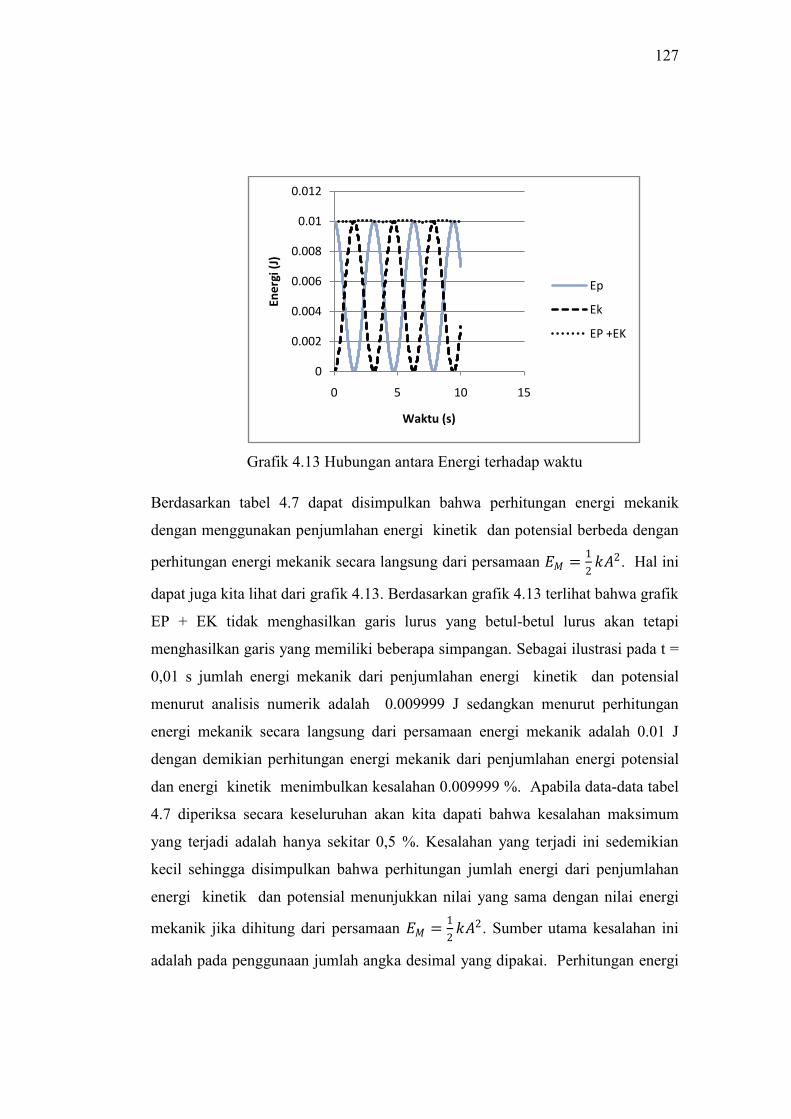
127
Grafik 4.13 Hubungan antara Energi terhadap waktu
Berdasarkan tabel 4.7 dapat disimpulkan bahwa perhitungan energi mekanik
dengan menggunakan penjumlahan energi kinetik dan potensial berbeda dengan
perhitungan energi mekanik secara langsung dari persamaan 𝐸𝑀 =1
2𝑘𝐴2. Hal ini
dapat juga kita lihat dari grafik 4.13. Berdasarkan grafik 4.13 terlihat bahwa grafik
EP + EK tidak menghasilkan garis lurus yang betul-betul lurus akan tetapi
menghasilkan garis yang memiliki beberapa simpangan. Sebagai ilustrasi pada t =
0,01 s jumlah energi mekanik dari penjumlahan energi kinetik dan potensial
menurut analisis numerik adalah 0.009999 J sedangkan menurut perhitungan
energi mekanik secara langsung dari persamaan energi mekanik adalah 0.01 J
dengan demikian perhitungan energi mekanik dari penjumlahan energi potensial
dan energi kinetik menimbulkan kesalahan 0.009999 %. Apabila data-data tabel
4.7 diperiksa secara keseluruhan akan kita dapati bahwa kesalahan maksimum
yang terjadi adalah hanya sekitar 0,5 %. Kesalahan yang terjadi ini sedemikian
kecil sehingga disimpulkan bahwa perhitungan jumlah energi dari penjumlahan
energi kinetik dan potensial menunjukkan nilai yang sama dengan nilai energi
mekanik jika dihitung dari persamaan 𝐸𝑀 =1
2𝑘𝐴2. Sumber utama kesalahan ini
adalah pada penggunaan jumlah angka desimal yang dipakai. Perhitungan energi
0
0.002
0.004
0.006
0.008
0.01
0.012
0 5 10 15
Ene
rgi (
J)
Waktu (s)
Ep
Ek
EP +EK
128
mekanik dengan persamaan 𝐸𝑀 =1
2𝑘𝐴2 menggunakan 2 angka desimal
sedangkan perhitungan jumlah energi dari penjumlahan energi kinetik dan
potensial menggunakan 4 angka desimal sehingga otomatis menghasilkan hasil
perhitungan yang berbeda. Oleh karena itu hal yang perlu dilakukan agar hasil
perhitungan menunjukkan nilai yang teliti perlu dilakukan dengan angka desimal
yang banyak namun jumlah angka desimal yang digunakan sama.
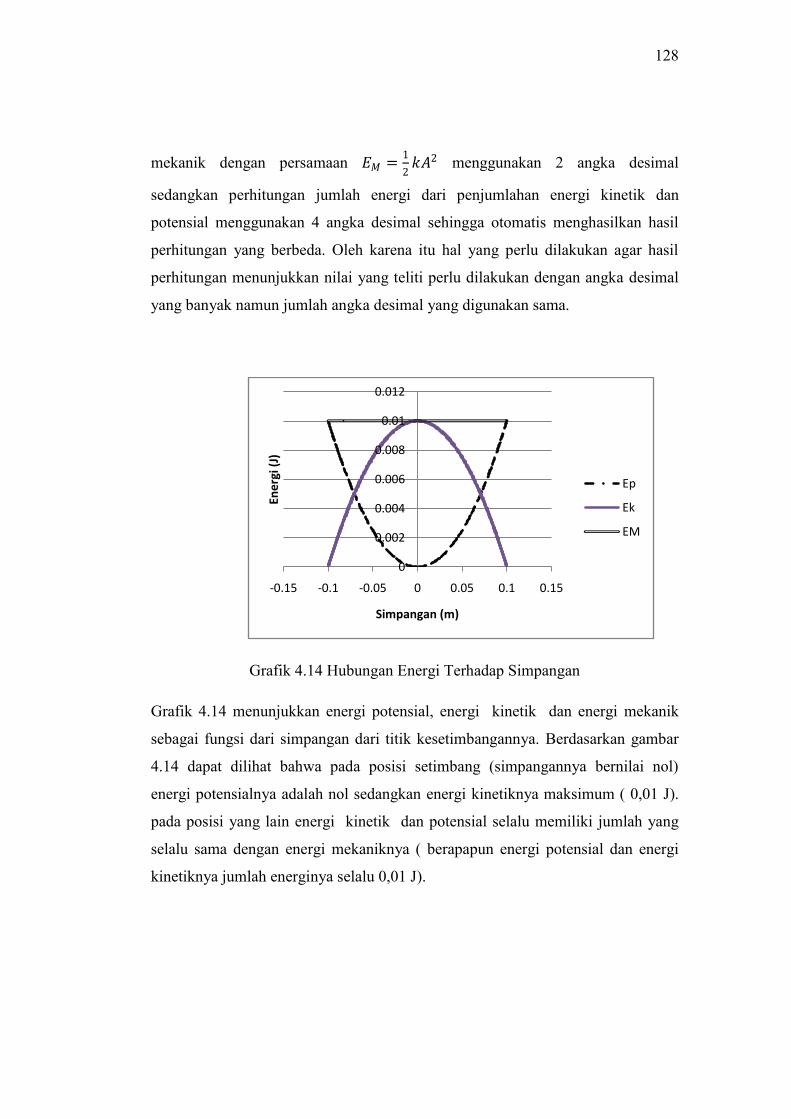
Grafik 4.14 Hubungan Energi Terhadap Simpangan
Grafik 4.14 menunjukkan energi potensial, energi kinetik dan energi mekanik
sebagai fungsi dari simpangan dari titik kesetimbangannya. Berdasarkan gambar
4.14 dapat dilihat bahwa pada posisi setimbang (simpangannya bernilai nol)
energi potensialnya adalah nol sedangkan energi kinetiknya maksimum ( 0,01 J).
pada posisi yang lain energi kinetik dan potensial selalu memiliki jumlah yang
selalu sama dengan energi mekaniknya ( berapapun energi potensial dan energi
kinetiknya jumlah energinya selalu 0,01 J).
0
0.002
0.004
0.006
0.008
0.01
0.012
-0.15 -0.1 -0.05 0 0.05 0.1 0.15
Ene
rgi (
J)
Simpangan (m)
Ep
Ek
EM
129
Pertanyaan 4.3
Berdasarkan soal contoh 4.3, jawablah pertanyaan-pertanyan berikut!
1. Bagaimanakah pengaruh fase getaran terhadap energi mekaniknya?
2. Berapakah energi potensial rata-ratanya?
3. Kapan jumlah energi potensial besarnya sama dengan energi kinetiknya?
4. Apa yang perlu dilakukan agar energi mekanik gerak harmonik sederhana
menjadi dua kali energi awal? Bagaimanakah pengaruhnya terhadap frekuensi
getarannya?
5. Berapakah energi kinetik dan potensialnya jika simpangannya adalah
setengah dari simpangan maksimumnya?
4.3 Osilator Non Harmonik
Pada sub bab sebelumnya telah dijelaskan bahwa salah satu ciri gerak
harmonik adalah periode osilasi yang tidak bergantung pada amplitudo. Pada
kasus tersebut selalu berlaku hukum Hooke, namun untuk suatu sistem dengan
pegas yang tidak mematuhi hukum Hooke apakah periodenya tetap tidak
tergantung amplitudonya? Untuk menjawab pertanyaan ini mungkin berdasarkan
intusisi dapat dikemukakan bahwa periodenya tergantung pada amplitudonya.
Namun bagaimanakah hubungan antara periode terhadap amplitudonya?
Misalkan terdapat suatu pegas yang diletakkan pada bidang datar diberikan
beban pada ujungnya kemudian beban ini ditarik pada jarak tertentu, pegas yang
dipakai memiliki gaya pemulih yang dinyatakan dengan persamaan F = -k x3.
Berdasarkan hukum kedua Newton maka persamaan geraknya dapat dituliskan
𝐹 = 𝑚𝑎 = −𝑘𝑥3 …(4.53)
Apabila percepatan dinyatakan dalam persamaan differensial maka persamaan
(4.53 ) dituliskan sebagai
𝑚𝑑2𝑥
𝑑𝑡 2 = −𝑘𝑥3

130
𝑑2𝑥
𝑑𝑡 2 = −𝑘
𝑚𝑥3 …(4.54)
apabila persamaan (4.54) dituliskan dalampersamaan differensial, maka akan kita
peroleh persamaan berikut
𝑑2𝑥
𝑑𝑡 2+
𝑘
𝑚𝑥3 = 0
persamaan differensial di atas tentu cukup sulit dipecahkan apabila kita
menggunakan pendekatan analitik karena sifatnya yang tidak linear. Salah satu
cara yang dapat kita gunakan untuk memecahkan persamaan (4.54) adalah dengan
menggunakan metode numerik, dengan uraian sebagai berikut. Persamaan (4.54)
dapat kita tuliskan dalam bentuk lain sebagai berikut
𝑑𝑣
𝑑𝑡= −
𝑘
𝑚𝑥3 …(4.55)
dengan mempergunakan teori Euler maka persamaan (4.55) dapat kita tuliskan
menjadi
𝑑𝑣
𝑑𝑡= limΔ𝑡→0
𝑣 𝑡+Δ𝑡 −𝑣(𝑡)
Δ𝑡= −
𝑘
𝑚𝑥3
sehingga
𝑣 𝑡+Δ𝑡 −𝑣(𝑡)
Δ𝑡= −
𝑘
𝑚𝑥3
atau
𝑣 𝑡 + Δ𝑡 = 𝑣 𝑡 −𝑘
𝑚𝑥3(𝑡) Δ𝑡 …(4.56)
Secara umum persamaan (4.56 ) dapat dituliskan
𝑣𝑖+1 = 𝑣𝑖 − 𝑘
𝑚 𝑥3
𝑖 Δ𝑡 …(4.57)
dengan cara yang sama, maka persamaan posisi x dapat kita peroleh dengan cara
yang sama yakni dengan menuliskan persamaan posisi dalam persamaan berikut
𝑑𝑥
𝑑𝑡= 𝑣 …(4.58)

131
apabila diuraikan dengan teori Euler maka persamaan (4.58) dituliskan sebagai
𝑥𝑖+1 = 𝑥3𝑖 + 𝑣𝑖 Δ𝑡
karena osilator non harmonik tidak memenuhi hukum kekekalan energi, maka
maka metode Euler tidak dapat digunakan lagi. Metode yang kita pilih adalah
metode Euler-Cromer sehingga persamaan kecepatan dan posisinya dapat
dinyatakan dengan persamaan berikut.
𝑣𝑖+1 = 𝑣𝑖 −𝑘
𝑚 𝑥3
𝑖 ∆𝑡 …(4.59)
𝑥𝑖+1 = 𝑥3𝑖 + 𝑣𝑖+1 ∆𝑡 …(4.60)
Contoh 4.4
Suatu osilator non harmonik terdiri dari pegas dengan tetapan 9 N/m dengan
beban seberat 0,2 kg mula-mula dalam keadaan diam kemudian beban ditarik
sepanjang 20 cm dalam arah horizontal kemudian dilepaskan. Analisislah
gerakannya dengan menggunakan Spreadsheet. Gunakan analitik dan metode
metode Euler-Cromer kemudian bandingkan hasil komputasinya. Catatan bahwa
g = 9,8 dan ∆t = 0,01s). Kemudian bandingkan hasilnya jika simpangan
maksimumnya diubah menjadi 1 m!
Penyelesaian
Langkah awal yang perlu kita lakukan untuk menyelesaikan soal tersebut adalah
dengan mendeklarasikan variabel-variabel persamaanya dalam Spreadsheet
seperti tabel berikut.
Tabel 4.8 Variabel-Variabel dalam Osilator Non Harmonik
Variabel Nilai Satuan
m 0.2 kg
A 0.2 m
k 9 N/m
to 0 s
∆t 0.01 s
vo 0 m/s

132
Langkah selanjutnya adalah mengadakan komputasi dengan Spreadsheet untuk
menentukan nilai energi potensial, energi kinetik dan energi mekanik seperti tabel
berikut.
Tabel 4.9 Posisi, Kecepatan dan Percepatan untuk Osilator Non Harmonik
Amplitudo = 0,2 m Amplitudo = 1 m
t Posisi Kecepatan Percepatan Posisi Kecepatan Percepatan
0 0.2 0 -0.36 1 0 -45
0.01 0.199964 -0.0036 -0.3598056 0.9955 -0.45 -44.3952296
0.02 0.199892019 -0.00719805 -0.359417 0.986560477 -0.8939523 -43.2099389
0.03 0.199784097 -0.01079222 -0.35883538 0.97329996 -1.3260516 -41.4908785
0.04 0.199640291 -0.01438058 -0.35806106 0.955890355 -1.7409604 -39.3040001
0.05 0.199460679 -0.01796119 -0.35709551 0.934550351 -2.1340004 -36.7299746
0.06 0.199245358 -0.02153214 -0.35594028 0.909537349 -2.5013002 -33.8589998
0.07 0.198994442 -0.02509155 -0.35459724 0.881138446 -2.8398902 -30.7854117
0.08 0.198708067 -0.02863752 -0.35306853 0.849661003 -3.1477443 -27.6025732
0.09 0.198386385 -0.03216820 -0.35135659 0.815423302 -3.4237700 -24.3984292
0.1 0.198029567 -0.03568177 -0.34946415 0.778745759 -3.6677543 -21.2519897
0.11 0.197637803 -0.03917641 -0.34739420 0.739943016 -3.8802742 -18.2308677
0.12 0.1972113 -0.04265035 -0.34515001 0.699317187 -4.0625829 -15.38987
0.13 0.196750281 -0.04610185 -0.34273511 0.65715237 -4.2164816 -12.7705837
0.14 0.196254989 -0.0495292 -0.34015325 0.613710494 -4.3441875 -10.4016722
0.15 0.195725681 -0.0529307 -0.33740845 0.569228452 -4.4482042 -8.29988953
0.16 0.195162633 -0.0563048 -0.33450492 0.52391642 -4.5312031 -6.47140446
0.17 0.194566134 -0.0596498 -0.33144713 0.477957249 -4.5959171 -4.91337227
0.18 0.193936491 -0.0629643 -0.32823970 0.431506739 -4.6450509 -3.61555741
0.19 0.193274024 -0.0662467 -0.32488748 0.384694674 -4.6812064 -2.56189329
0.2 0.192579067 -0.0694956 -0.3213954 0.33762642 -4.7068254 -1.73189590
0.21 0.191851972 -0.0727095 -0.31776884 0.290384976 -4.724144 -1.10188163
0.22 0.191093099 -0.0758872 -0.31401292 0.243033344 -4.7351632 -0.64596666
0.23 0.190302825 -0.07902739 -0.31013317 0.195617116 -4.7416228 -0.33684729
0.24 0.189481538 -0.08212872 -0.30613513 0.148167202 -4.7449913 -0.14637562
0.25 0.188629637 -0.0851900 -0.30202459 0.100702651 -4.7464551 -0.04595526
133
0.26 0.187747534 -0.08821032 -0.2978072 0.053233505 -4.7469145 -0.00678840
0.27 0.18683565 -0.09118839 -0.29348895 0.00576368 -4.7469825
-8.61613E-
06
0.28 0.185894417 -0.09412328 -0.28907567 -0.04170614 -4.7469826 0.00326447
0.29 0.184924277 -0.09701403 -0.28457339 -0.08917564 -4.7469499 0.031911801
0.3 0.183925679 -0.09985977 -0.27998812 -0.13664195 -4.7466308 0.114806034
0.31 0.182899082 -0.10265965 -0.27532591 -0.18409673 -4.7454828 0.280770265
0.32 0.181844953 -0.10541291 -0.27059282 -0.23152353 -4.7426750 0.558467548
0.33 0.180763765 -0.10811884 -0.26579490 -0.27889443 -4.7370904 0.976184872
0.34 0.179655997 -0.11077679 -0.26093820 -0.32616772 -4.7273285 1.561476533
0.35 0.178522135 -0.11338617 -0.25602874 -0.37328486 -4.7117138 2.340634742
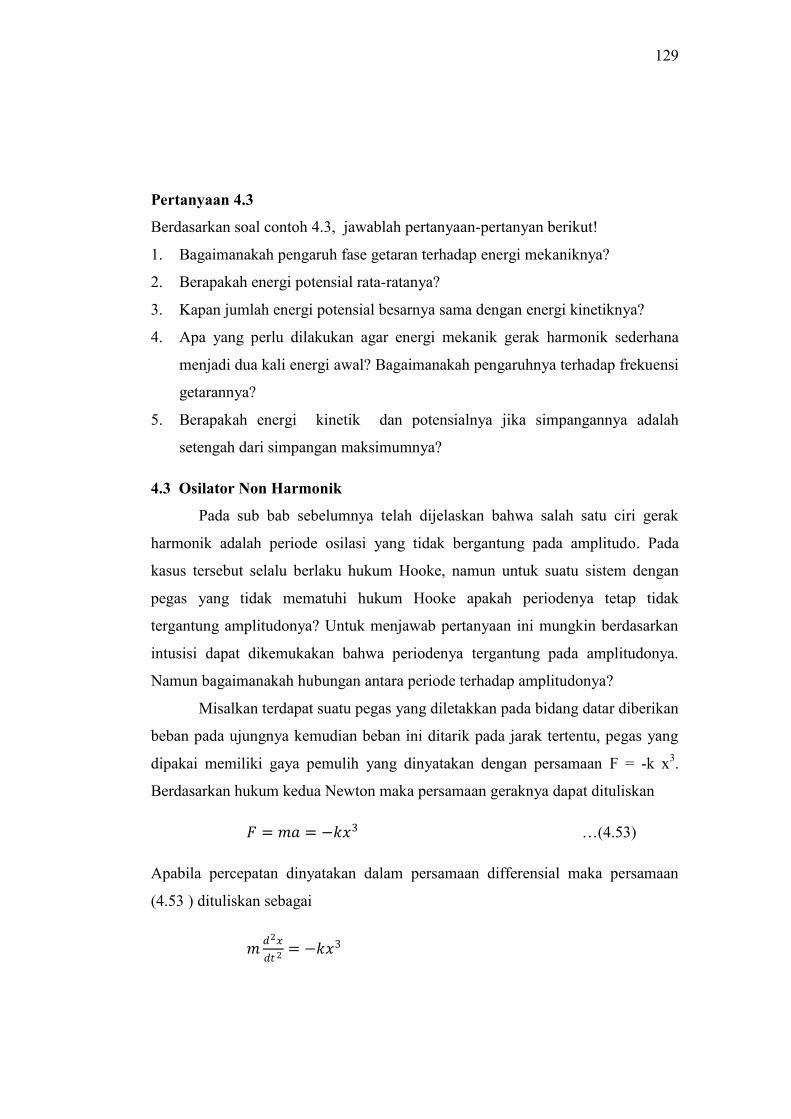
Berdasarkan tabel 4.9 dapat disimpulkan bahwa pada saat amplitudonya bernilai
0,2 m maka periode adalah sekitar 5.51 s sedangkan pada saat amplitudonya 1
maka periodenya menjadi 2,19 s hal ini menunjukkan bahwa untuk sistem osilator
non harmonik berlaku bahwa jika amplitudo semakin besar maka periode osilasi
osilatornya semakin kecil.
Grafik 4.15 Posisi Terhadap Waktu Dalam Osilator Non Harmonik untuk
Amplitudo 0,2 m
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 2 4 6 8Po
sisi
(m
)
Waktu (s)
134
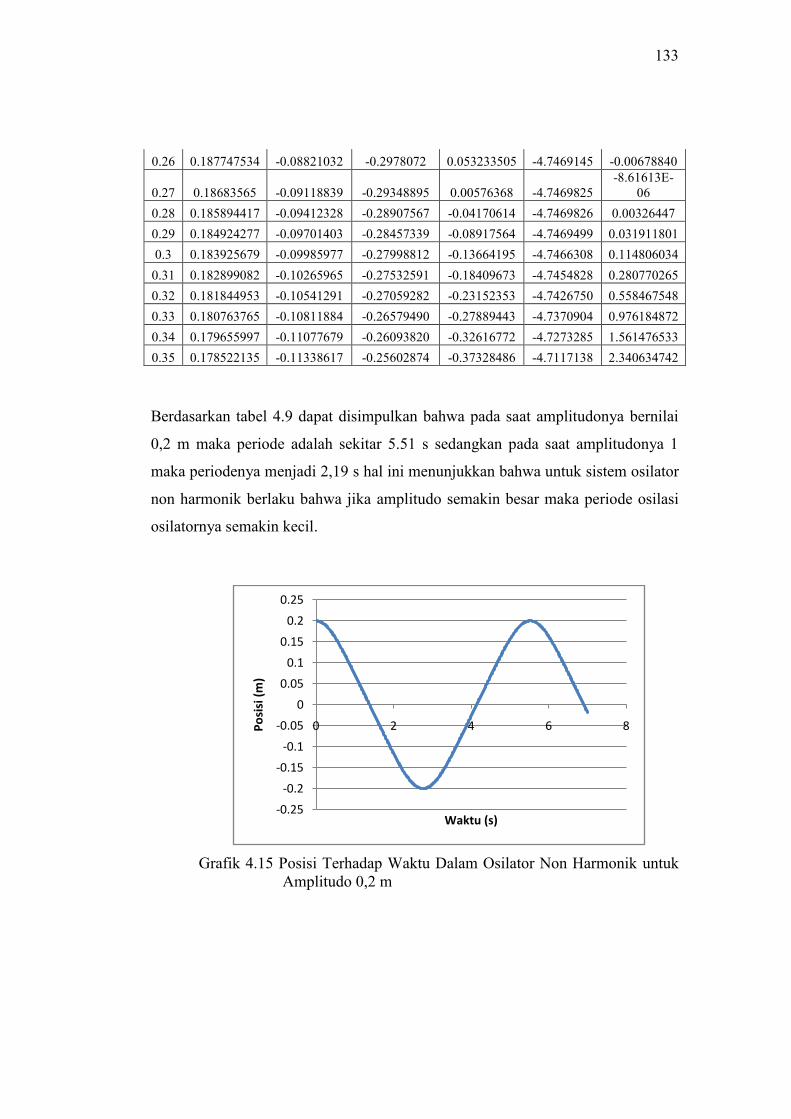
Grafik 4.16 Kecepatan Terhadap Waktu untuk Osilator Non Harmonik
untuk Amplitudo 0,2 m
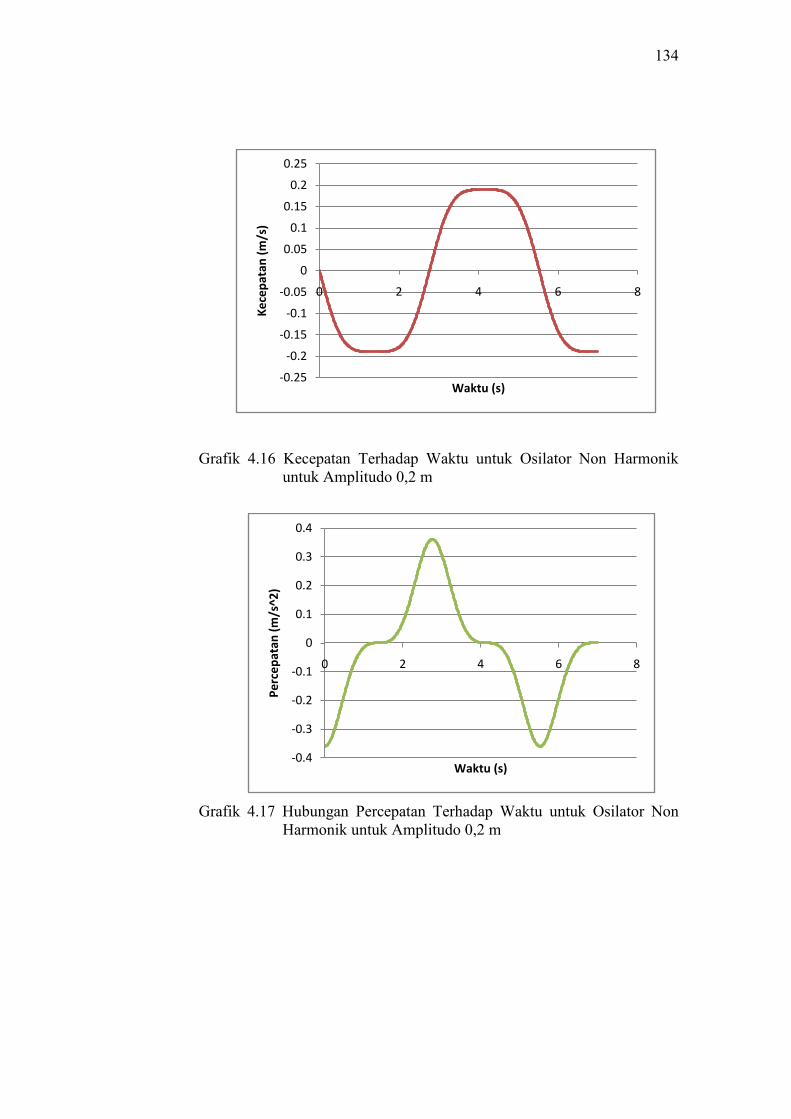
Grafik 4.17 Hubungan Percepatan Terhadap Waktu untuk Osilator Non
Harmonik untuk Amplitudo 0,2 m
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 2 4 6 8
Ke
cep
atan
(m
/s)
Waktu (s)
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 2 4 6 8
Pe
rce
pat
an (
m/s
^2)
Waktu (s)
135
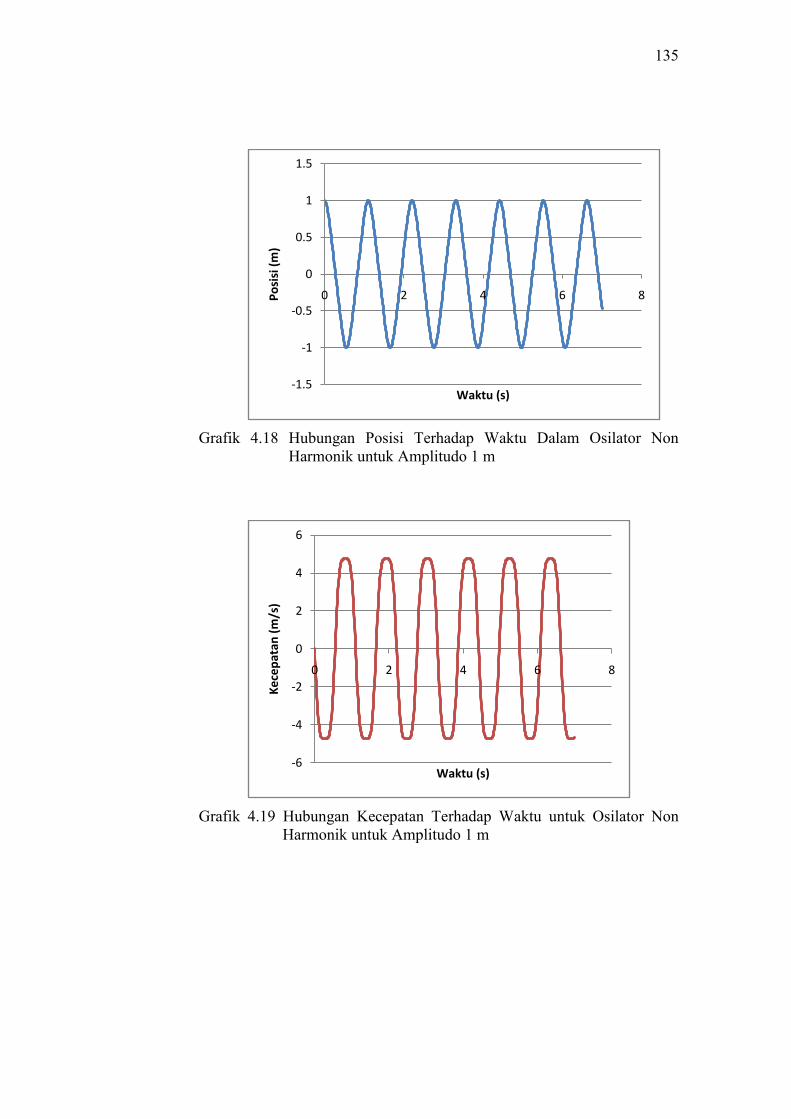
Grafik 4.18 Hubungan Posisi Terhadap Waktu Dalam Osilator Non
Harmonik untuk Amplitudo 1 m
Grafik 4.19 Hubungan Kecepatan Terhadap Waktu untuk Osilator Non
Harmonik untuk Amplitudo 1 m
-1.5
-1
-0.5
0
0.5
1
1.5
0 2 4 6 8Po
sisi
(m
)
Waktu (s)
-6
-4
-2
0
2
4
6
0 2 4 6 8
Ke
cep
atan
(m
/s)
Waktu (s)
136
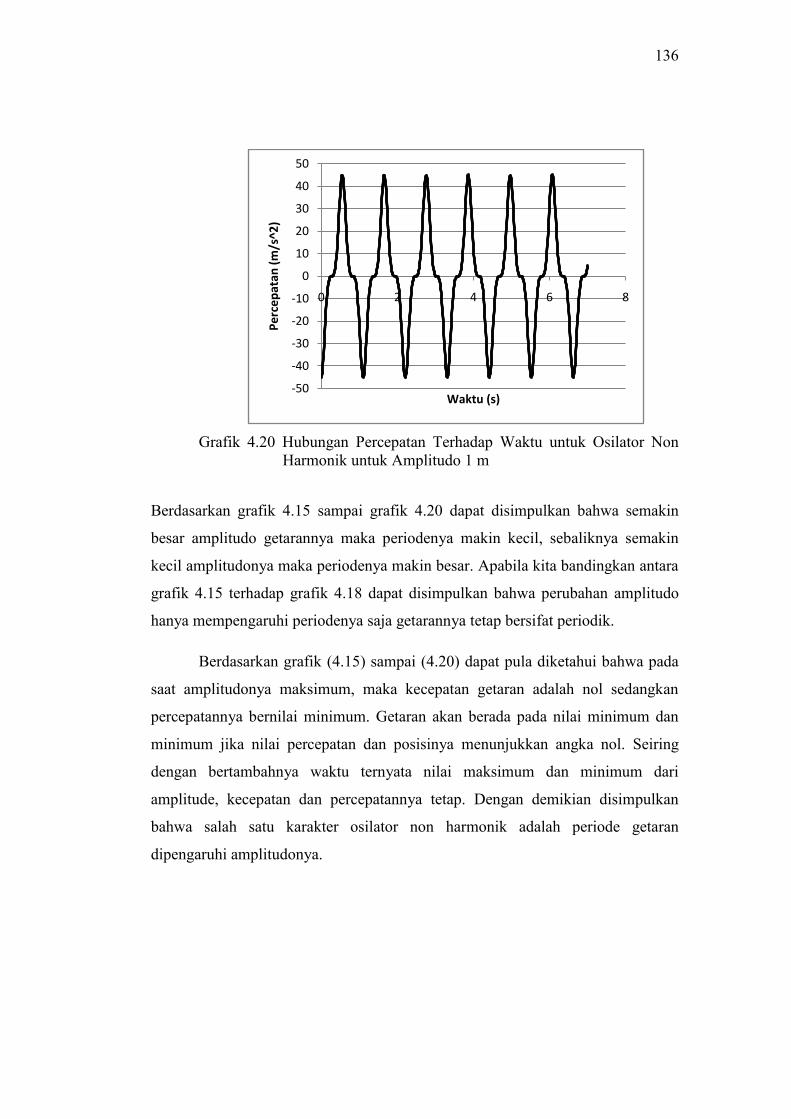
Grafik 4.20 Hubungan Percepatan Terhadap Waktu untuk Osilator Non
Harmonik untuk Amplitudo 1 m
Berdasarkan grafik 4.15 sampai grafik 4.20 dapat disimpulkan bahwa semakin
besar amplitudo getarannya maka periodenya makin kecil, sebaliknya semakin
kecil amplitudonya maka periodenya makin besar. Apabila kita bandingkan antara
grafik 4.15 terhadap grafik 4.18 dapat disimpulkan bahwa perubahan amplitudo
hanya mempengaruhi periodenya saja getarannya tetap bersifat periodik.
Berdasarkan grafik (4.15) sampai (4.20) dapat pula diketahui bahwa pada
saat amplitudonya maksimum, maka kecepatan getaran adalah nol sedangkan
percepatannya bernilai minimum. Getaran akan berada pada nilai minimum dan
minimum jika nilai percepatan dan posisinya menunjukkan angka nol. Seiring
dengan bertambahnya waktu ternyata nilai maksimum dan minimum dari
amplitude, kecepatan dan percepatannya tetap. Dengan demikian disimpulkan
bahwa salah satu karakter osilator non harmonik adalah periode getaran
dipengaruhi amplitudonya.
-50
-40
-30
-20
-10
0
10
20
30
40
50
0 2 4 6 8
Pe
rce
pat
an (
m/s
^2)
Waktu (s)
137
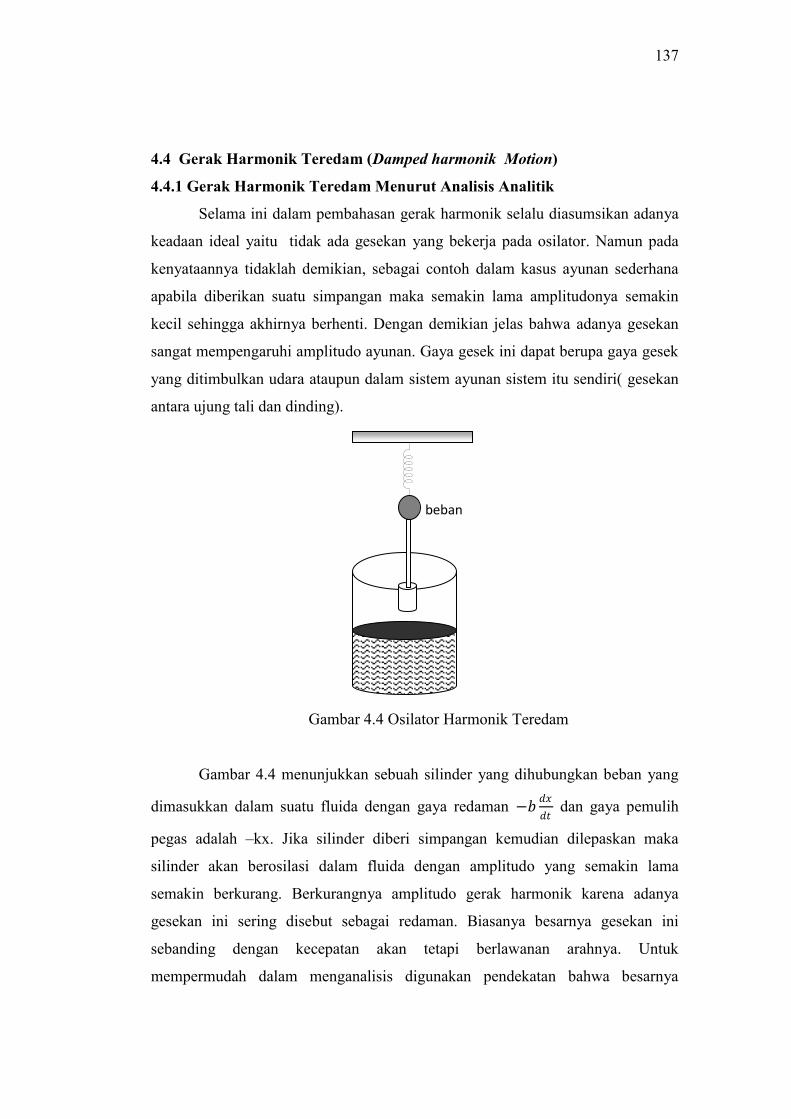
4.4 Gerak Harmonik Teredam (Damped harmonik Motion)
4.4.1 Gerak Harmonik Teredam Menurut Analisis Analitik
Selama ini dalam pembahasan gerak harmonik selalu diasumsikan adanya
keadaan ideal yaitu tidak ada gesekan yang bekerja pada osilator. Namun pada
kenyataannya tidaklah demikian, sebagai contoh dalam kasus ayunan sederhana
apabila diberikan suatu simpangan maka semakin lama amplitudonya semakin
kecil sehingga akhirnya berhenti. Dengan demikian jelas bahwa adanya gesekan
sangat mempengaruhi amplitudo ayunan. Gaya gesek ini dapat berupa gaya gesek
yang ditimbulkan udara ataupun dalam sistem ayunan sistem itu sendiri( gesekan
antara ujung tali dan dinding).
Gambar 4.4 Osilator Harmonik Teredam
Gambar 4.4 menunjukkan sebuah silinder yang dihubungkan beban yang
dimasukkan dalam suatu fluida dengan gaya redaman −𝑏𝑑𝑥
𝑑𝑡 dan gaya pemulih
pegas adalah –kx. Jika silinder diberi simpangan kemudian dilepaskan maka
silinder akan berosilasi dalam fluida dengan amplitudo yang semakin lama
semakin berkurang. Berkurangnya amplitudo gerak harmonik karena adanya
gesekan ini sering disebut sebagai redaman. Biasanya besarnya gesekan ini
sebanding dengan kecepatan akan tetapi berlawanan arahnya. Untuk
mempermudah dalam menganalisis digunakan pendekatan bahwa besarnya
beban

138
gesekan sebanding dengan kecepatan beban yang berosilasi. Gejala adanya
redaman dalam gerak harmonik ini dapat ditemui pada shock absorber sepeda
motor atau mobil. Misalkan besarnya gaya gesek adalah Fx = - b vx dimana vx
menyatakan kecepatan gerak osilasinya. Tanda negatif muncul karena gaya gesek
ini berlawanan arah dengan arah gerak osilasinya. Dengan menggunakan hukum
kedua Newton maka gaya total yang bekerja pada beban yang berosilasi
dinyatakan dengan
Σ𝐹𝑥 = −𝑏𝑣𝑥 − 𝑘𝑥 …(4.61)
𝑚 𝑑2𝑥
𝑑𝑡 2 = −𝑏𝑑𝑥
𝑑𝑡− 𝑘𝑥
apabila kedua ruas persamaan dibagi dengan m akan diperoleh
𝑑2𝑥
𝑑𝑡 2 =−𝑏
𝑚
𝑑𝑥
𝑑𝑡−
𝑘
𝑚𝑥 …(4.62)
persamaan (4.62) dapat pula kita susun kembali menjadi persamaan berikut
𝑑2𝑥
𝑑𝑡 2 +𝑏
𝑚
𝑑𝑥
𝑑𝑡+
𝑘
𝑚𝑥 = 0 …(4.63)
Persamaan (4.63) adalah persamaan differensial gerak osilator harmonik dengan
redaman. solusi analitik persamaan (4.63) adalah
𝑥 = 𝐴𝑒− 𝑏
2𝑚 𝑡cos(𝜔′𝑡 + 𝜙) …(4.64)
frekuensi sudut 𝜔′ didefinisikan sebagai
𝜔′ = 𝑘
𝑚−
𝑏
2𝑚
2
…(4.65)
Kita dapat mengecek kebenaran bahwa persamaan (4.64) merupakan solusi
persamaan (4.63) dengan menghitung turunan pertama dan kedua dari x kemudian
mensubstitusikan kedalam persamaan (4.62 ) lalu mengecek bahwa suku kiri dan
kanan adalah sama.
139
Berdasarkan persamaan (4.64) dapat disimpulkan bahwa amplitudo
getaran 𝐴𝑒− 𝑏
2𝑚 𝑡 tidaklah konstan akan tetapi berkurang menurut faktor 𝑒−
𝑏
2𝑚 𝑡
sehingga amplitudo getarannya dapat berfluktuasi hingga menjadi nol. Dengan
memperhatikan persamaan (4.65) kita ketahui bahwa nilai 𝜔′ tidak tetap tetapi
tergantung pada nilai b dengan uraian sebagai berikut.
Jika 𝑘
𝑚=
𝑏
2𝑚
2
maka akan terjadi redaman kritis (Critical Damped).
Pada keadaan redaman kritis ini sistem tidak akan berosilasi lagi akan
tetapi akan kembali pada posisi kesetimbangan tanpa berosilasi ketika
diberi simpangan kemudian dilepaskan.
Jika 𝑘
𝑚>
𝑏
2𝑚
2
maka akan terjadi redaman kurang (Under Damped) pada
kondisi ini maka sistem akan berosilasi namun dengan amplitudo yang
akan semakin berkurang dengan bertambahnya waktu.
Jika 𝑘
𝑚<
𝑏
2𝑚
2
maka akan terjadi redaman lebih (Over Damped). Pada
keadaan ini sistem tidak akan berosilasi lagi, namun sistem akan kembali
pada posisi kesetimbangan lebih lambat jika dibandingkan dalam kasus
teredam kritis.
4.4.2 Gerak Harmonik Teredam Menurut Analisis Numerik
Pada kesempatan ini kita akan menganalisis gerak harmonik dengan
redaman menggunakan pendekatan analisis numerik. Untuk menganalisis gerak
tersebut akan digunakan metode Euler-Cromer dengan uraian sebagai berikut.
Persamaan (4.63 ) kita uraiakan sebagai berikut
𝑑2𝑥
𝑑𝑡 2 =−𝑏
𝑚
𝑑𝑥
𝑑𝑡−
𝑘
𝑚𝑥 …(4.66)
Berdasarkan definisi bahwa 𝑑2𝑥
𝑑𝑡 2 =𝑑𝑣
𝑑𝑡 maka persamaan ( 4.66) dapat dituliskan
menjadi
𝑑𝑣
𝑑𝑡=
−𝑏
𝑚
𝑑𝑥
𝑑𝑡−
𝑘
𝑚𝑥 …(4.67)

140
𝑑𝑥
𝑑𝑡= 𝑣 …(4.68)
Solusi numerik dengan metode Euler-Cromer persamaan (4.67) dan (4.68) adalah
𝑣𝑖+1 = 𝑣𝑖 −𝑏
𝑚 𝑣𝑖 Δ𝑡 −
𝑘
𝑚𝑥𝑖 Δ𝑡 …(4.69)
dan
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖+1 Δ𝑡 …(4.70)
Berdasarkan persamaan (4.69 ) dan (4.70) jelas dapat disimpulkan bahwa solusi
dengan analisis numerik lebih mudah dibandingkan solusi eksaknya.
Contoh 4.5
Misalkan dalam sistem gerak harmonik teredam terdapat balok dengan massa 1 kg
dan konstanta pegas 8 N/m. Kemudian balok ditarik sejauh 20 cm kemudian
dilepaskan, jika b= 0,23 analisislah geraknya kemudian bandingkan solusi analitik
terhadap solusi numeriknya.
Penyelesaian
Langkah awal yang perlu kita lakukan untuk menyelesaikan soal tersebut adalah
dengan mendeklarasikan variabel-variabel persamaanya dalam Spreadsheet
seperti tabel berikut.
Tabel 4.10 Variabel-Variabel dalam Gerak Harmonik Teredam
Variabel Nilai Satuan
v 0 m/s
k 8 N/m
xo 0.2 m
b 0.23
dt 0.05 s
m 1 kg

141
Langkah selanjutnya adalah mengadakan komputasi dengan Spreadsheet untuk
menentukan nilai energi potensial, energi kinetik dan energi mekanik seperti tabel
berikut.
Tabel 4.11 Perbandingan Posisi Benda Menurut Analisis Analitik dan
Numerik
t v X _Numerik
X
_Analitik
0 0 0.2 0.2
0.05 -0.08 0.196 0.19687136
0.1 -0.15748 0.188126 0.18987013
0.15 -0.23092 0.17658003 0.1791796
0.2 -0.2989 0.16163524 0.16505417
0.25 -0.36011 0.14362961 0.14781355
0.3 -0.41342 0.12295845 0.12783561
0.35 -0.45785 0.10006584 0.10554827
0.4 -0.49261 0.07543518 0.0814204
0.45 -0.51712 0.04957907 0.05595201
0.5 -0.53101 0.02302872 0.02966406
0.55 -0.53411 -0.0036769 0.00308779
0.6 -0.5265 -0.0300018 -0.0232459
0.65 -0.50844 -0.055424 -0.048817
0.7 -0.48043 -0.0794453 -0.0731266
0.75 -0.44312 -0.1016015 -0.0957065
0.8 -0.39739 -0.1214709 -0.1161282
0.85 -0.34423 -0.1386823 -0.134011
0.9 -0.2848 -0.1529222 -0.1490289
0.95 -0.22035 -0.1639398 -0.1609165
1 -0.15224 -0.171552 -0.1694737
1.05 -0.08187 -0.1756456 -0.1745685
1.1 -0.01067 -0.1761792 -0.1761395
1.15 0.059922 -0.173183 -0.1741957
1.2 0.128507 -0.1667577 -0.168816
1.25 0.193732 -0.1570711 -0.1601464
1.3 0.254332 -0.1443545 -0.1483967
1.35 0.309149 -0.128897 -0.1338353
1.4 0.357153 -0.1110394 -0.1167834
1.45 0.397461 -0.0911663 -0.0976081
1.5 0.429357 -0.0696985 -0.0767143
1.55 0.452299 -0.0470835 -0.0545365
1.6 0.465931 -0.023787 -0.0315295

142
1.65 0.470087 -0.0002826 -0.0081597
1.7 0.464795 0.02295714 0.01510488
1.75 0.450267 0.04547046 0.03780359
… … … …
Langkah selanjutnya adalah membuat grafik dengan Spreadsheet untuk hubungan
simpangan terhadap waktu seperti tabel berikut.
Gambar 4.21 Gerak Harmonik Teredam Terhadap Waktu untuk 𝜙 = 0
Berdasarkan tabel (4.7) dan grafik (4.21) disimpulkan bahwa amplitudo
gerak harmonik dengan redaman tidaklah tetap, akan tetapi amplitudonya
menurun sebagai fungsi waktu. Berdasarkan tabel (4.7) dapat disimpulkan bahwa
simpangan pada t = 0.05 s menurut analisis analitik adalah 0.19687136 m
sedangkan menurut analisis numerik simpangannya adalah 0.196 m dengan
demikian perhitungan dengan analsis numerik mengandung kesalahan 0.44%.
Namun demikian kesalahan yang ditimbulkan perhitungan dengan analisis
numerik tidaklah linear akan tetapi selalu berfluktuasi terhadap waktunya.
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 10 20 30 40 50 60Sim
pan
gan
(m
)
Waktu (s)
x Numerik x Analitik
143
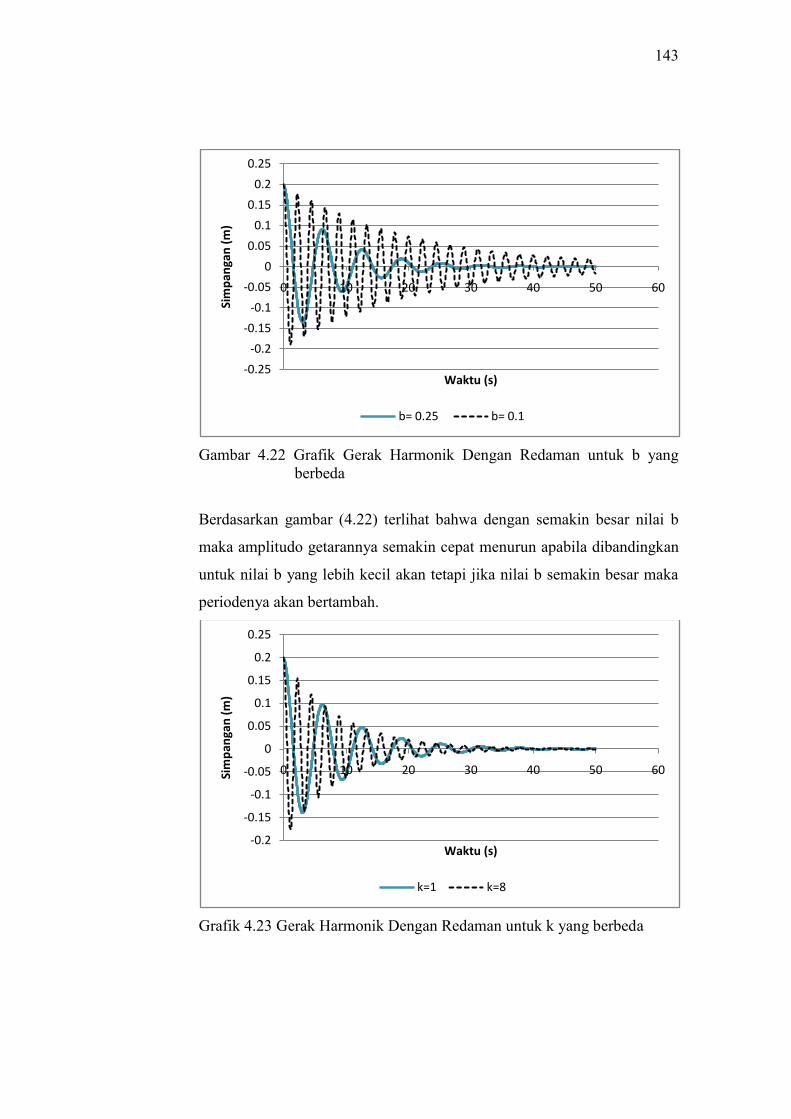
Gambar 4.22 Grafik Gerak Harmonik Dengan Redaman untuk b yang
berbeda
Berdasarkan gambar (4.22) terlihat bahwa dengan semakin besar nilai b
maka amplitudo getarannya semakin cepat menurun apabila dibandingkan
untuk nilai b yang lebih kecil akan tetapi jika nilai b semakin besar maka
periodenya akan bertambah.
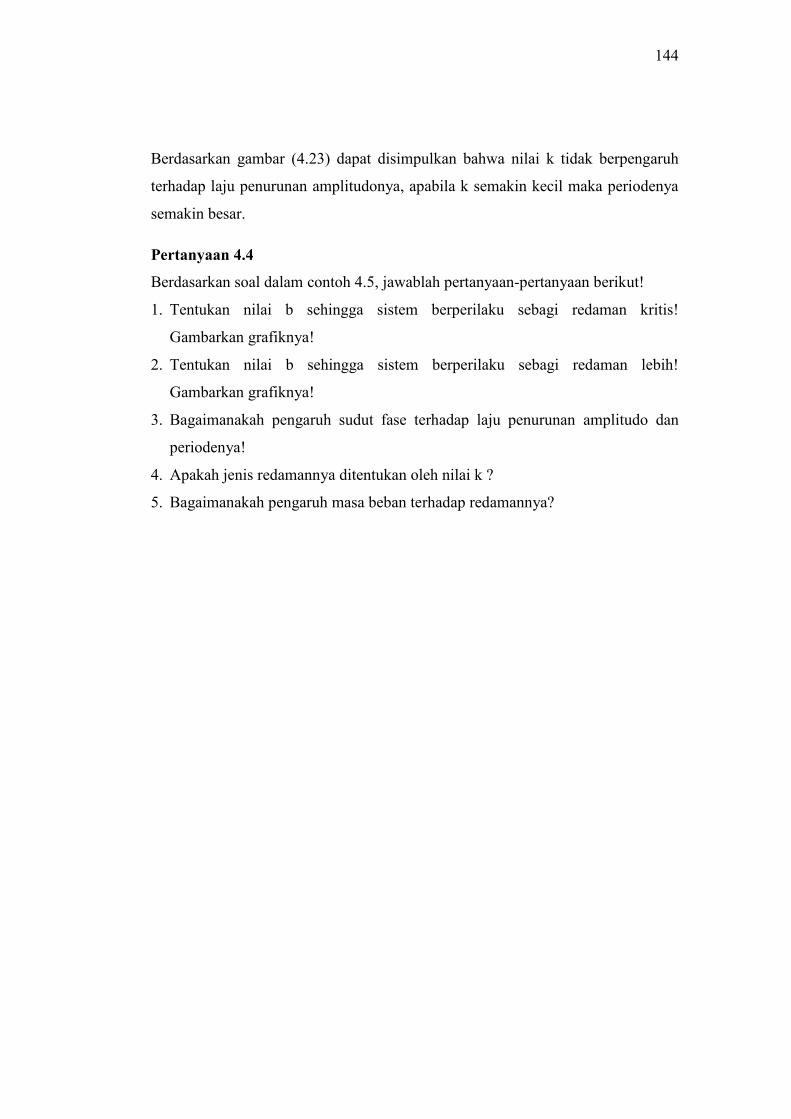
Grafik 4.23 Gerak Harmonik Dengan Redaman untuk k yang berbeda
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 10 20 30 40 50 60
Sim
pan
gan
(m
)
Waktu (s)
b= 0.25 b= 0.1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 10 20 30 40 50 60Sim
pan
gan
(m
)
Waktu (s)
k=1 k=8
144
Berdasarkan gambar (4.23) dapat disimpulkan bahwa nilai k tidak berpengaruh
terhadap laju penurunan amplitudonya, apabila k semakin kecil maka periodenya
semakin besar.
Pertanyaan 4.4
Berdasarkan soal dalam contoh 4.5, jawablah pertanyaan-pertanyaan berikut!
1. Tentukan nilai b sehingga sistem berperilaku sebagi redaman kritis!
Gambarkan grafiknya!
2. Tentukan nilai b sehingga sistem berperilaku sebagi redaman lebih!
Gambarkan grafiknya!
3. Bagaimanakah pengaruh sudut fase terhadap laju penurunan amplitudo dan
periodenya!
4. Apakah jenis redamannya ditentukan oleh nilai k ?
5. Bagaimanakah pengaruh masa beban terhadap redamannya?

145
Kesimpulan
1. Solusi analitik ayunan sederhana untuk sudut yang cukup kecil dinyatakan
dalam persamaan:
𝜃 = 𝜃0 𝑐𝑜𝑠 ( ω 𝑡 + δ )
𝜔 =𝑑𝜃
𝑑𝑡= −𝜃0 ω sin(ωt + δ)
𝛼 = 𝑑2𝜃
𝑑𝑡 2 = −𝜃0 ω2 𝑐𝑜𝑠 (ω𝑡 + δ)
2. Solusi numerik ayunan sederhana untuk sudut yang cukup kecil
dinyatakan dalam persamaan:
𝜔1+1 = 𝜔𝑖 − 𝑔
𝑙 𝜃𝑖 Δ𝑡
𝜃𝑖+1 = 𝜃𝑖 + 𝜔𝑖 Δ𝑡
3. Solusi numerik ayunan sederhana untuk sudut yang cukup kecil dengan
metode Leapfrog dinyatakan dalam persamaan:
𝜃𝑖+1 = 𝜃𝑖 + 𝜔𝑖∆𝑡 +𝛼𝑖 ∆𝑡2
2
𝜔𝑖+1 = 𝜔𝑖 +𝛼𝑖+𝛼𝑖+1
2 ∆𝑡
4. Solusi analitik gerak harmonik sederhana dengan pegas dalam posisi
horizontal dinyatakan dalam persamaan:
𝑥 = 𝐴 𝑐𝑜𝑠 ( ω 𝑡 + δ )
𝑣 =𝑑𝑥
𝑑𝑡= −𝐴𝜔 Sin (ωt + δ)
a= 𝑑2𝑥
𝑑𝑡 2 = −𝐴ω2 𝐶𝑜𝑠 (ω𝑡 + δ)
5. Solusi analitik posisi untuk gerak harmonik sederhana dengan pegas dalam
posisi vertikal dinyatakan dalam persamaan 𝑦 = 𝐴 cos(𝜔𝑡 + 𝛿)
6. Solusi numerik gerak harmonik sederhana dengan pegas dalam keadaan
horizontal dinyatakan dalam persamaan:
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖 Δ𝑡
𝑣𝑖+1 = 𝑣𝑖 − 𝑘
𝑚 𝑥 𝑖Δ𝑡
7. Solusi numerik gerak harmonik sederhana dengan pegas dalam keadaan
horizontal dengan metode Euler Cromer dinyatakan dalam persamaan:

146
𝑣𝑖+1 = 𝑣𝑖 −𝑘
𝑚 𝑥𝑖∆𝑡
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖+1 ∆𝑡
8. Solusi numerik gerak harmonik sederhana dengan pegas dalam keadaan
vertical dengan metode Euler Cromer dinyatakan dalam persamaan:
𝑣𝑖+1 = 𝑣𝑖 −𝑘
𝑚 𝑦𝑖∆𝑡
𝑦𝑖+1 = 𝑦𝑖 + 𝑣𝑖+1 ∆𝑡
9. Besarnya energi pada gerak harmonik sederhana dinyatakan dengan
persamaan:
𝐸𝑝 =1
2𝑘𝐴2 𝑐𝑜𝑠2 ( ω 𝑡 + δ )
𝐸𝑘 =1
2 𝑘𝐴2 Sin2 (ωt + δ)
𝐸𝑀 =1
2𝑘𝐴2
10. Pada gerak Osilasi Non harmonik periode osilasinya tergantung pada
amplitudo getarannya.
11. Persamaan differensial gerak harmonik dengan redaman dinyatakan
dengan persamaan 𝑑2𝑥
𝑑𝑡 2 +𝑏
𝑚
𝑑𝑥
𝑑𝑡+
𝑘
𝑚𝑥 = 0
12. Solusi analitik gerak harmonik dengan redaman dinyatakan dalam
persamaan:
𝑥 = 𝐴𝑒− 𝑏
2𝑚 𝑡cos(𝜔′𝑡 + 𝜙)
𝜔′ = 𝑘
𝑚−
𝑏
2𝑚
2
13. Solusi numerik gerak harmonik dengan redaman dinyatakan dalam
persamaan:
𝑣𝑖+1 = 𝑣𝑖 −𝑏
𝑚 𝑣𝑖 Δ𝑡 −
𝑘
𝑚𝑥𝑖 Δ𝑡
𝑥𝑖+1 = 𝑥𝑖 + 𝑣𝑖+1 Δ𝑡

147
Soal:
1. Buatlah lembar kerja dalam Spreadsheet untuk menganalisis pengaruh
sudut osilasi dalam kasus ayunan sederhana dengan sudut yang besar
misalkan pada sudut 200 terhadap periode getarannya. Bandingkan hasil
komputasi Anda dengan analisis analitik yang menyatakan bahwa untuk
sudut besar berlaku bahwa periodenya dirumuskan menurut persamaan:
𝑇 = 2𝜋 𝑙
𝑔 1 +
12
22𝑠𝑖𝑛2
𝜃
2+
12
22
32
42𝑠𝑖𝑛4
𝜃
2+ ⋯
2. Suatu ayunan sederhana terdiri dari seutas tali yang memiliki panjang 1m
dengan beban seberat 10 gra.m mula-mula dalam keadaan diam dengan
posisi sudut awal 0,15 rad. Jika kecepatan sudut awalnya 0 rad/s dan beban
kemudian dilepaskan analisislah gerakannya dengan menggunakan
Spreadsheet dengan menggunakan analitik dan pendekatan numerik
dengan menggunakan metode Euler-Cromer dan metode Leapfrog
kemudian selidikilah metode manakah yang memiliki ketelitian lebih
tinggi jika dibandingkan solusi analitiknya. (catatan bahwa g = 9,8 dan ∆t
= 0,04).
3. Gaya pemulih suatu pegas dalam kasus gerak harmonik sederhana
dinyatakan dengan 𝐹 = −𝑘𝑥2. Buatlah suatu lembar kerja dalam
Spreadsheet untuk menganalisis kasus ini kemudian selidikilah apakah
periode getarannya tergantung pada amplitudo getarannya atau tidak!
4. Buatlah lembar kerja dalam Spreadsheet untuk menganalisis pengaruh
beda fase terhadap periode getaran gerak harmonik dengan redaman.