abstrak - repo.polinpdg.ac.idrepo.polinpdg.ac.id/1043/1/dina_nurul_fadila.pdf · menggerakan belt...
TRANSCRIPT

ABSTRAK
Motor listrik merupakan salah satu sistem peralatan yang mengubah energi listrik
menjadi energi mekanik. Motor listrik yang sering digunakan di industri adalah
motor induksi tiga fasa. Beltconveyor adalah alat yang digunakan untuk
mengangkat atau memindakan barang-barang padat dan berat dalan suatu industri.
Untuk menggerakkan beltconveyor sebagai alat simulasi pada proses pemindahan
batu bara dari dalam lorong bawah tanah menuju keluar menggunaka motor
induksi. Untuk menjamin proses simulasi pengangkutan batu bara berjalan lancar
diharapkan motor sebagai unit penggerak bekerja secara efisien agar dapat
menggerakan belt conveyor. Untuk dapat menggerakkan motor tersebut daya
motor yang digunakan harus sesuai agar tidak terjadi kerusakan pada motor, jadi
besar torsi motor tergantung dari besar daya keluar dari motor tersebut. Daya
keluaran dari motor bersifat elektrik diubah menjadi daya mekanik berupa torsi
dan putaran pada poros dan selanjutnya dipakai untuk memutar beban. Besarnya
daya motor dipengaruhi oleh besar arus dan berat beban yang akan digerkkan oleh
motor, semakin besar arus motor dan berat beban yang digerakkan maka semakin
besar daya yang dikeluarkan oleh motor tersebut.
Kata kunci : motor induksi, beltconveyor, daya
1
BAB I
PENDAHULUAN
1.1 Latar Belakang
Motor penggerak pada bidang industri memegang peranan penting serta
banyak digunakan. Hal ini dikarenakan motor listrik merupakan salah satu sistem
peralatan yang mengubah energi listrik menjadi energi mekanik. Dimana energi
mekanik ini banyak digunakan untuk berbagai keperluan pelayanan beban
ekonomis. Pada umumnya motor listrik yang sering digunakan di industri adalah
motor induksi tiga fasa, karena motor tersebut mempunyai konstruksi yang sangat
kuat dan sederhana dan tidak mudah rusak, sehingga mudah dalam perawatan
serta putaran-putaran motor relative konstan dengan perubahan beban.
Ban berjalan di Ombilin Minning Trainning College sebagai alat untuk simulasi
proses pemindahan batu bara dari dalam lorong bawah tanah menuju keluar
menggunakan motor induksi. Motor unit penggerak pada ban berjalan tersebut
sangat penting, karna apabila motor penggerak di Ombilin Minning College tidak
bekerja maka proses simulasi tersebut akan terganggu dan proses untuk
pensimulasian tersebut akan memakan waktu yang banyak. Untuk menjamin
proses simulasi pengangkutan batu bara tersebut berjalan dengan lancar
diharapkan motor sebagai unit penggerak dapat bekerja secara efsisien untuk
menggerakan ban berjalant tersebut.
Keperluan penyesuaian antara sistem penggerak dan beban yang akan
digerakkan harus diketahui besarnya torsi pada sumbu motor yang dipakai untuk
menggerakkan beban tersebut. Seperti diketahui bahwa daya atau energi yang
2
terdapat pada sumbu motor berupa daya mekanis yaitu berupa torsi dan putaran.
Jadi besarnya torsi motor listrik tergantung dari besarnya daya keluar dari motor
tersebut. Oleh sebab itu untuk menghitung besarnya torsi pada poros motor yang
akan dipakai untuk mengangkat beban harus diketahui lebih dulu besarnya daya
keluaran dari motor. Jadi daya keluaran dari motor yang bersifat elektris tersebut
diubah menjadi daya mekanis berupa torsi dan putaran pada poros dan selanjutnya
dipakai untuk memutar beban. Dengan demikian dalam bidang perencanaan yang
akan mengguankan motor listrik perlu diketahui dengan jalan melakukan
pembahasan mengenai daya-daya yang bekrja pada motor induksi (Suyamto,
2009).
Studi ini bertujuan untuk mengetahui hubungan antara daya sistem
penggerak dari jenis motor induksi dengan beban yang akan digerakkan dimana
hal tersebut sangat penting dalam perencanan sistem penggerak menggunakan
mesin listrik. Dalam penerapan penggunaan ban berjalan hal yang perlu
diperhatikan adalah tenaga penggerak dari conveyorbelt tersebut, karna mengingat
kondisi lokasi di tambang bawah tanah yang berbentuk seperti lorong-lorong dan
tidak jarang juga kondisi didalam tambang tersebut yang miring.
Berdasarkan permasalahan tersebut penulis membuat tugas akhir yaitu dengan
judul Studi Estimasi Perhitungan Kapasitas daya Angkut Belt Conveyor
Menggunakan Daya Motor 11 kW.
1.2 Rumusan Masalah
a. Bagaimana daya listrik yang dibutuhkan oleh motor induksi sebagai
penggerak ban berjalan
3
b. Bagaimana efesiensi ekonomis dari output yang dihasilkan oleh motor
penggerak ban berjalan
c. Berapa berat beban yang dapat diangkut oleh motor dengan daya 11 kW
1.3 Tujuan
1. Untuk mengetahui aplikasi nyata dari sebuah motor penggerak ban
berjalan
2. Untuk mengetahui besar daya sebenarnya sehingga terjadinya kerusakan
pada motor dapat dihindari
3. Untuk mengetahui berat beban yang dapat diangkut oleh ban berjalan
dengan daya motor 11 kW
1.4 Batasan Masalah
Penulis akan membahas tentang bagaimana perhitungan daya motor induksi
dan perhitungan berat beban yang dapat diangkut oleh ban berjalan dengan daya
motor 11 kW
1.5 Sistematika Penulisan
Dalam penulisan laporan ini penulis menggunakan metode penulisan yaitu
sebagai berikut :
1. Bab 1 Pendahuluan
Bab ini berisikan tentang latar belakang, rumusan masalah, batasan
masalah, tujuan, manfaat dan metode penulisan
2. Bab II Tinjauan Pustaka
Pada bab ini berisikan teori-teori yang mendukung pembuatan laporan ini
4
3. Bab III Keadaan Umum
Pada bab ini membahas hasil pengamatan dilapangan, jenis data yang
dipakai dan teknik analisa data yang dipakai
4. Bab IV Analisa
Pada bab ini membahas tentang perhitungan besar daya motor penggerak
ban berjalan, dan efesiensi ekonomis dan membandingkan dengan data
yang ada dilapangan
5. Bab V Penutup
Bsb ini berisikan kesimpulan tentang alat yang dibuat dan saran-saran
yang diperlukan
5
BAB II
TINJAUAN PUSTAKA
2.1 Ban Berjalan
2.1.1 Pengertian Ban Berjalan
Ban berjalan adalah pesawat pengangkut yang digunakan untuk
memindahkan muatan dalam bentuk satuan atau tumpahan, dengan arah
horizontal atau membentuk sudut dari suatu sistem operasi yang satu sistem ke
sistemoperasi yang laindalam satu line proses produksi. Ban berjalan pada
dasarnya adalah peralatan yang sederhana, alat tersebut terdiri dari sabuk yang
tahan terhadap pengangkutan benda padat.sabuk yang digunakan pada ban
berjalan dapat dibuat dari berbagai jenis bahan misalnya dari karet, plastik,kulit
ataupun logam yang tergantung dari jenis dan sifat bahaya yang akan diangkut.
Ban berjalan digunakan untuk memindahkan material atau hasil produksi
dalam jumlah besar dari suatu tempat ke tempat yang lain. Ban berjalan mungkin
memiliki panjang beberapa kilometer atau mungkin beberapa meter tergantung
jenis aplikasi yang diinginginkan. Ada beberapa hal yang perlu diperhatikan
dalam pemilihan suatu mesin pemindah bahan yaitu faktor ekonomis, kondisi
sutua lokasi atau pabrik serta karakteristiki beban muatan.
Ban berjalan sendiri digunakan oleh kebanyak industri karena beberapa
alasan yairu :
6
1. Ban berjalan memiliki kapasitas angkut yang cukup besar (500 sampai 5000
m3/jam atau lebih),
2. Pemindahan barang dapat dilakukan secara kontinyu, jarak pemindahan yang
cukup jauh (500 sampai 5000 m atau lebih) lintasan tetap.
3. Bahan material yang dapat diangkat dapat berupa material curah (bulk load)
atau muatan satuan (unit load), berat mesin relatif ringan serta pemeliharaan
dan operasinal yang mudah (Zainuri, 2012).
Prinsip kerja dari belt conveyor adalah mentranspor material yang ada diatas
belt dan setelah mencapai ujung belt maka material ditumpahkan akibatnya belt
berbalik arah. Ban berjalan digerakan oleh motor listrik. Motor lostrik menarik
belt dengan prinsip adanya gesekan antara permukaan idler roller dengan belt
sehingga kapasitasnya tergantung gaya gesekan tersebut.
Berdasarkan lintasan gerak ban berjalan diklasifikasikan sebagai berikut :
a. Horizontal
b. Inklansi
c. Kombinasi horizontal dan inklansi
Pada umumnya belt conveyor terdiri : kerangka, dua buah puli yaitu puli
penggerak pada head end dan pulley pembalik pada tail end, sabuk lingkar idler
roller atas dan idle roller bawah, unit penggerak , cawan pengisi yang dipasang
diatas conveyor, saluran buang dan pembersih ban berjalan yang biasanya
dipasang dekat head puli
7
Gambar 2.1 Komponen-komponen Pada Ban Berjalan
2.1.2 Jenis – Jenis Ban Berjalan
Berdasarkan transmisi daya mesin pemindah bahan dibedakan menjadi beberapa
jensi yaitu :
1. Ban berjalan mekanis
2. Ban berjalan pneumatik
3. Ban Berjalan hidraulik
4. Ban Berjalan gravitasi
8
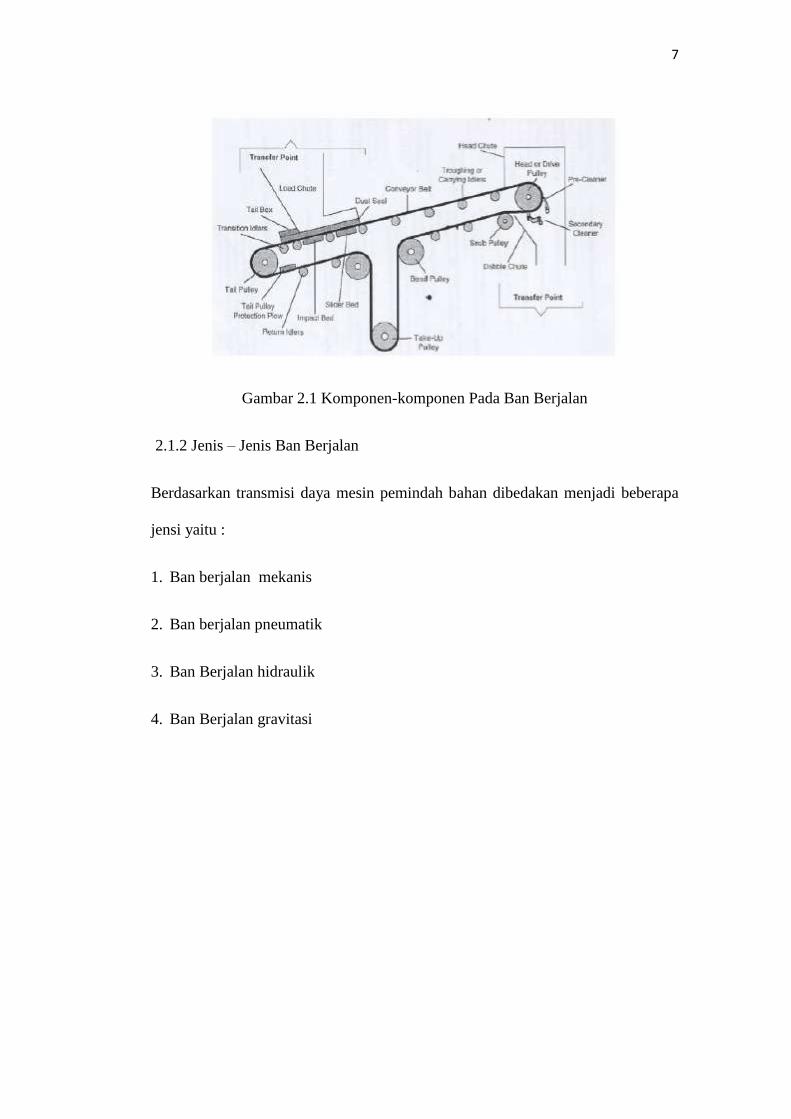
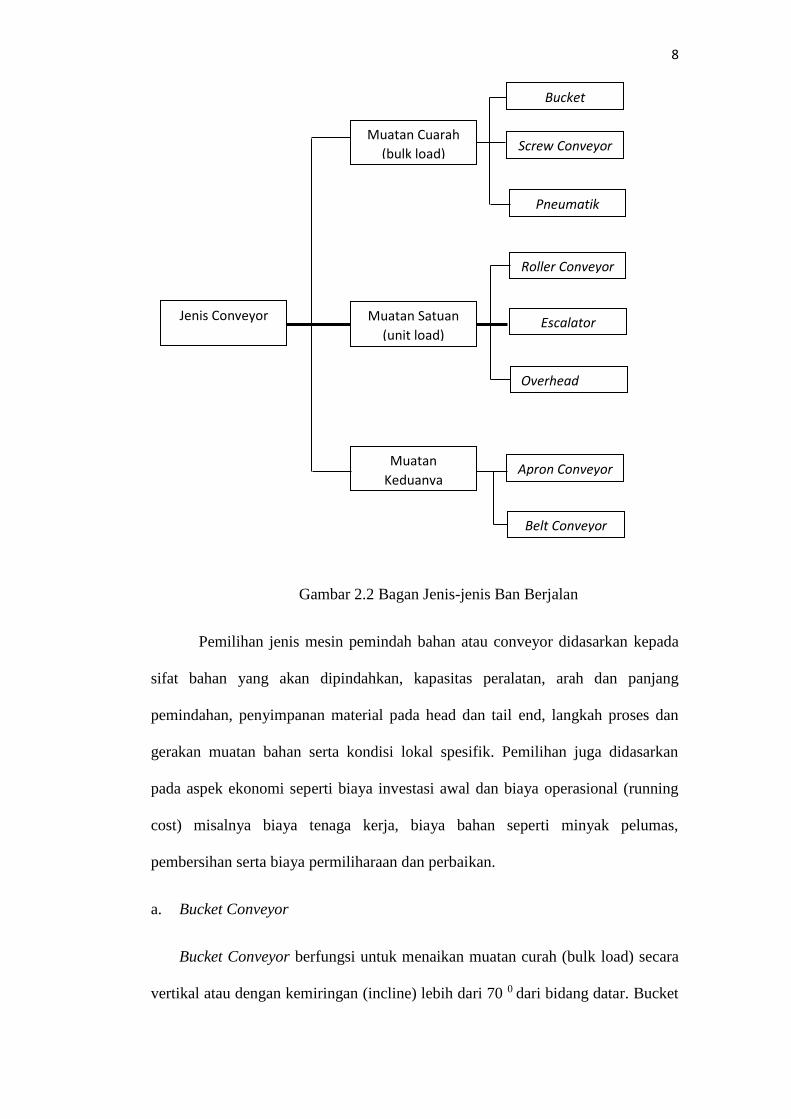
Gambar 2.2 Bagan Jenis-jenis Ban Berjalan
Pemilihan jenis mesin pemindah bahan atau conveyor didasarkan kepada
sifat bahan yang akan dipindahkan, kapasitas peralatan, arah dan panjang
pemindahan, penyimpanan material pada head dan tail end, langkah proses dan
gerakan muatan bahan serta kondisi lokal spesifik. Pemilihan juga didasarkan
pada aspek ekonomi seperti biaya investasi awal dan biaya operasional (running
cost) misalnya biaya tenaga kerja, biaya bahan seperti minyak pelumas,
pembersihan serta biaya permiliharaan dan perbaikan.
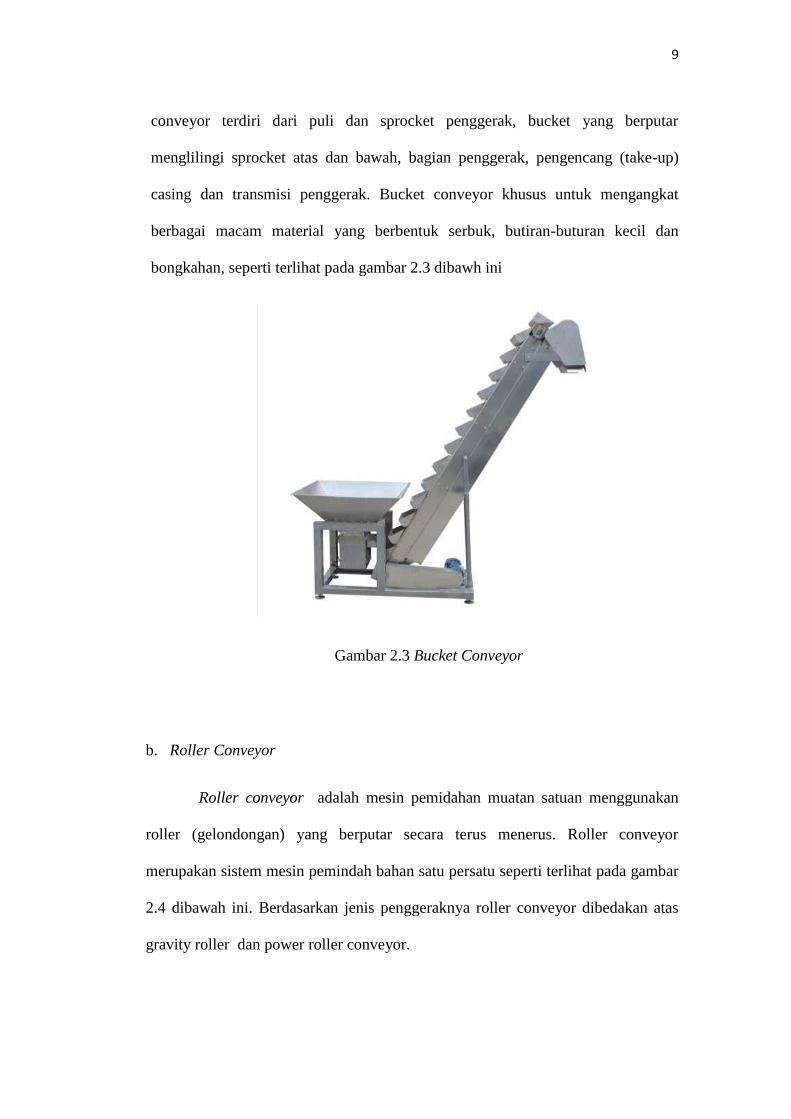
a. Bucket Conveyor
Bucket Conveyor berfungsi untuk menaikan muatan curah (bulk load) secara
vertikal atau dengan kemiringan (incline) lebih dari 70 0 dari bidang datar. Bucket
Jenis Conveyor
Muatan
Keduanya
Muatan Cuarah
(bulk load)
Muatan Satuan
(unit load)
Bucket
Conveyor
Screw Conveyor
Pneumatik
Conveyor
Roller Conveyor
Overhead
Conveyor
Escalator
Belt Conveyor
Apron Conveyor
9
conveyor terdiri dari puli dan sprocket penggerak, bucket yang berputar
menglilingi sprocket atas dan bawah, bagian penggerak, pengencang (take-up)
casing dan transmisi penggerak. Bucket conveyor khusus untuk mengangkat
berbagai macam material yang berbentuk serbuk, butiran-buturan kecil dan
bongkahan, seperti terlihat pada gambar 2.3 dibawh ini
Gambar 2.3 Bucket Conveyor
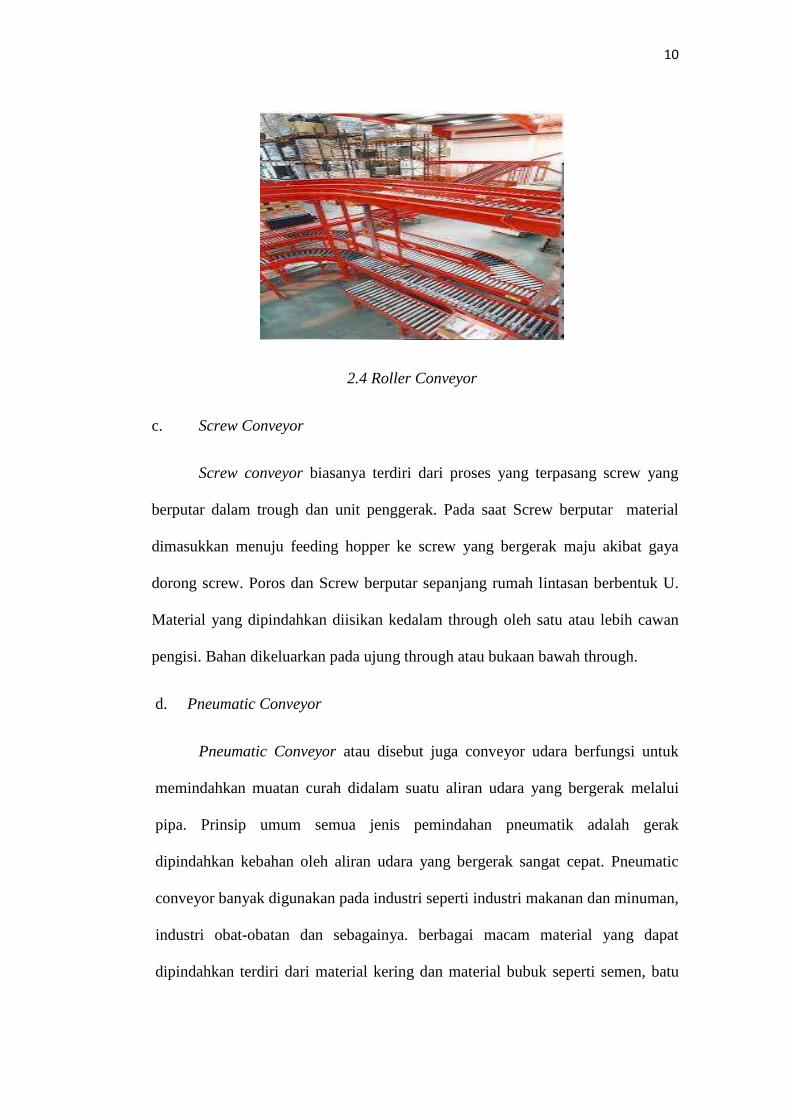
b. Roller Conveyor
Roller conveyor adalah mesin pemidahan muatan satuan menggunakan
roller (gelondongan) yang berputar secara terus menerus. Roller conveyor
merupakan sistem mesin pemindah bahan satu persatu seperti terlihat pada gambar
2.4 dibawah ini. Berdasarkan jenis penggeraknya roller conveyor dibedakan atas
gravity roller dan power roller conveyor.
10
2.4 Roller Conveyor
c. Screw Conveyor
Screw conveyor biasanya terdiri dari proses yang terpasang screw yang
berputar dalam trough dan unit penggerak. Pada saat Screw berputar material
dimasukkan menuju feeding hopper ke screw yang bergerak maju akibat gaya
dorong screw. Poros dan Screw berputar sepanjang rumah lintasan berbentuk U.
Material yang dipindahkan diisikan kedalam through oleh satu atau lebih cawan
pengisi. Bahan dikeluarkan pada ujung through atau bukaan bawah through.
d. Pneumatic Conveyor
Pneumatic Conveyor atau disebut juga conveyor udara berfungsi untuk
memindahkan muatan curah didalam suatu aliran udara yang bergerak melalui
pipa. Prinsip umum semua jenis pemindahan pneumatik adalah gerak
dipindahkan kebahan oleh aliran udara yang bergerak sangat cepat. Pneumatic
conveyor banyak digunakan pada industri seperti industri makanan dan minuman,
industri obat-obatan dan sebagainya. berbagai macam material yang dapat
dipindahkan terdiri dari material kering dan material bubuk seperti semen, batu

11
bara, butiran alumina, apatitte, concentrte, serbuk kayu, dan sebaginya seperti
terlihat pada gambar 2.5
Gambar 2.5 Pneumatic Conveyor
e. Over Head Conveyor
Over head conveyor terdiri dari bagian penarik atau (pulling member)
dengan troli, pembawa dan pemegang muatan, lintasan overhead, penggerak, pulli
pembelok dan lintasan pengarah. Bagian penarik biasanya terbuat dari rantai atau
steel rope fleksibel yang dapat naik turun dengan adanya lintasan pembelok untuk
memindahkan muatan baik secara manual ataupun secara otomatis dari motor
penggerak.
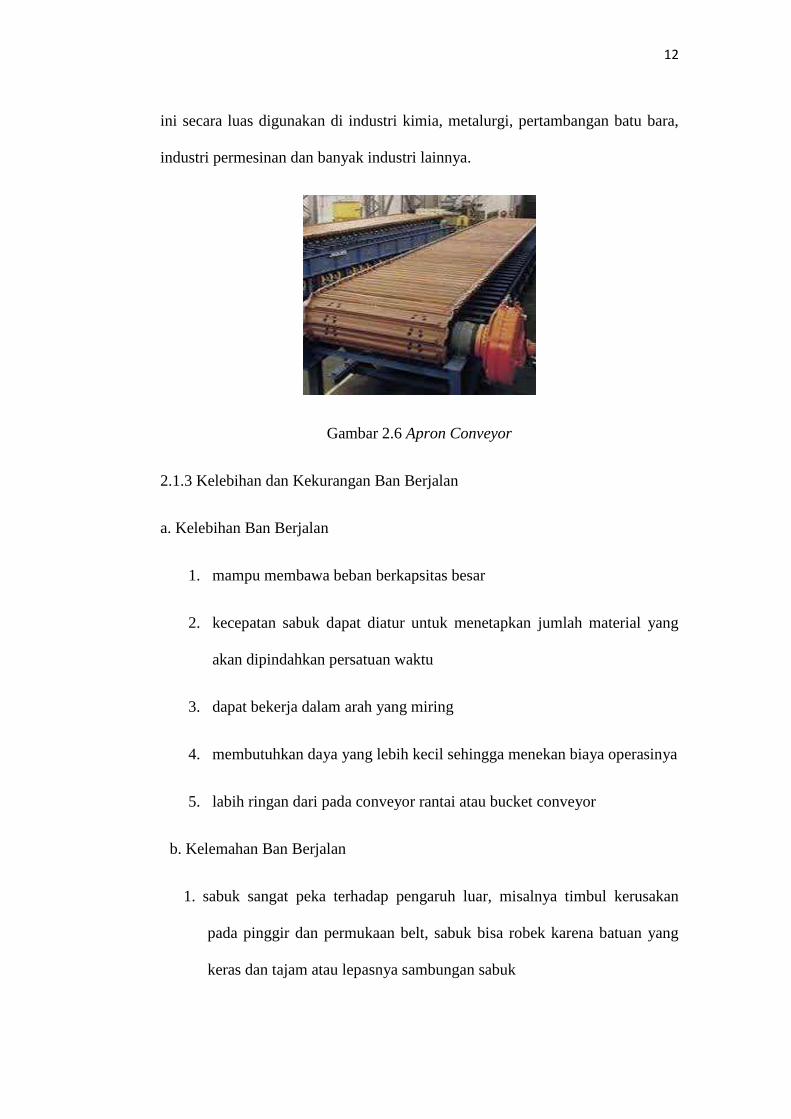
f. Apron Conveyor
Apron conveyor disebut juga terdiri dari frame, penggerak, take-up
spocket dan discharge spout. Apron conveyor digunakan untuk memindahkan
berbagai macam muatan curah atau satuan baik secara horizontal atau
membentuk sudut inklansi seperti terlihat pad gambar 2.6 dibawah ini. Conveyor
12
ini secara luas digunakan di industri kimia, metalurgi, pertambangan batu bara,
industri permesinan dan banyak industri lainnya.
Gambar 2.6 Apron Conveyor
2.1.3 Kelebihan dan Kekurangan Ban Berjalan
a. Kelebihan Ban Berjalan
1. mampu membawa beban berkapsitas besar
2. kecepatan sabuk dapat diatur untuk menetapkan jumlah material yang
akan dipindahkan persatuan waktu
3. dapat bekerja dalam arah yang miring
4. membutuhkan daya yang lebih kecil sehingga menekan biaya operasinya
5. labih ringan dari pada conveyor rantai atau bucket conveyor
b. Kelemahan Ban Berjalan
1. sabuk sangat peka terhadap pengaruh luar, misalnya timbul kerusakan
pada pinggir dan permukaan belt, sabuk bisa robek karena batuan yang
keras dan tajam atau lepasnya sambungan sabuk
13
2. biaya perawatan mahal
3. jalur pemindahan (transfer line) karena untuk satu unit ban berjalan hanya
bisa dipasang untuk jalur lurus
4. kemiringan atau sudut inklansi yang terbatas.
2.2 Motor Induksi
2.2.1 Pengertian Motor Induksi
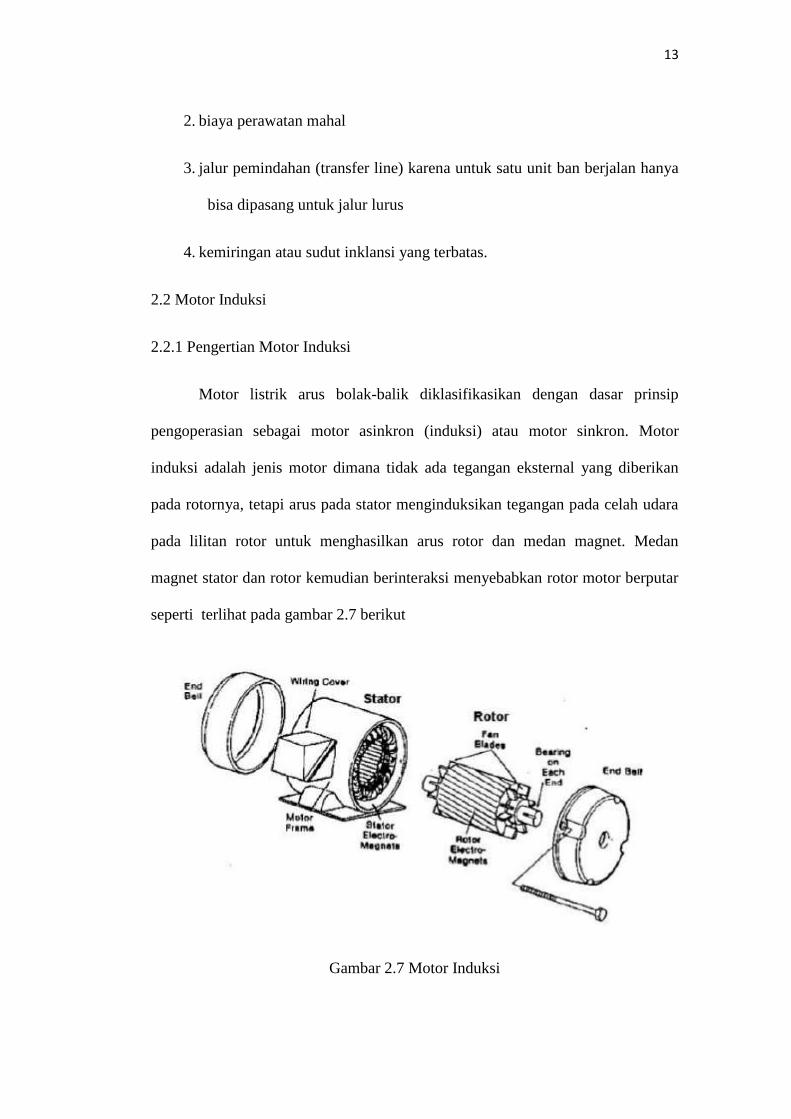
Motor listrik arus bolak-balik diklasifikasikan dengan dasar prinsip
pengoperasian sebagai motor asinkron (induksi) atau motor sinkron. Motor
induksi adalah jenis motor dimana tidak ada tegangan eksternal yang diberikan
pada rotornya, tetapi arus pada stator menginduksikan tegangan pada celah udara
pada lilitan rotor untuk menghasilkan arus rotor dan medan magnet. Medan
magnet stator dan rotor kemudian berinteraksi menyebabkan rotor motor berputar
seperti terlihat pada gambar 2.7 berikut
Gambar 2.7 Motor Induksi
14
Motor arus bolak-balik menggunakan arus lsitrik yang membalikkan
arahnya secara teratur pada rentang waktu tertentu. Pada dasarnya motor induksi
terdiri dari satu bagian yang tidak berputar (stator) dan bagian yang bergerak
memutar (rotor). Secara ringkas stator terdiri dari belk-belk dinamo yang
berisolasi pada sisinya dan mempunyai ketebalan 0,35-0,5 disusun menjadi
sebuah paket blek yang berbentuk gelang. Dan sisi dalamnya dilengkapi dengan
alur-alur dalam alur ini terdapat perbedaan antara motor asinkron dengan lilitan
sarang dan gelang seret dengan lilitan tiga fasa. Motor arus bolak-balik adalah
motor yang kecepatannya sulit untuk dikendalikan, motor AC bekrja berdasarkan
frekuensi tertentu.
Motor induksi dapat diklasifikasikan menjadi dua kelompok utama yaitu
motor induksi satu fasa dan motor induksi tiga fasa. Motor induksi satu fasa
memiliki satu gulungan stator, beroperasi dengan pasokan daya daya satu fasa,
memiliki sebuah rotor sangakar tupai dan membutuhkan sebuah alat untuk
menghidupkannya. Sejauh ini motor induksi satu fasa banyak digunakan untuk
peralatan rumah tangga seperti fan angin, mesin cuci dan pengering pakaian. Yang
kedua ada motor induksi tiga fasa, medan magnet yang berputar dihasilkan oleh
pasokan tiga fasa yang seimbang. Motor induksi tiga fasa memiliki kemampuan
daya yang tinggi, dapat memiliki sangkar tupai atau gulungan rotor dan penyalaan
sendiri.
Di industri untuk penyesuaian antara sistem penggerak dan beban yang
akan digerakkan harus diketahui besarnya torsi pada sumbu motor yang dipakai
untuk menggerakkan beban tersebut. Seperti diketahui daya atau energi yang
terdapat pada sumbu motor berupa daya mekanis berupa torsi dan putaran. Jadi

15
besarnya torsi motor listrik tergantung dari besarnya daya keluaran dari motor
tersebut. Untuk menghitung bsarnya torsi pada poros motor yang akan dipakai
untuk mengangkat beban harus diketahui dulu besarnya daya keluaran dari motor.
Daya keluaran motor bersifat elektrsi diubah menjadi daya mekanis berupa torsi
dan putaran pada poros yang selanjutnya dipakai untuk memutar beban. Karna
daya masukan pada motor bersifat elektris maka setelah dikurangi dengan seluruh
daya yang adal dalam motor keluarannya juga bersifat elektris, seperti telihat pada
gambar 2.8 berikut.
Gambar 2.8 Macam-macam Daya pada Motor Listrik
Apabila diketahui nilai daya keluaran maka dapat dihiutng besarnya torsi
pada poros motor dengan rumus sebagai berikut.
............................................................................................ (2.1)
Dengan :
P = Daya keluaran (watt)
T : torsi (N-m)
n : Putaran pada motor (rpm)
Dari gambar 2.8 dapat dilihat bahwa untuk menghitung besarnya daya keluaran
motor perlu diketahui besarnya seluruh rugi-rugi daya yang ada pada motor
16
induksi, yaitu meliputi rugi inti stator, rugi lilitan stator,rugi inti rotor, rugi lilitan
rotor, rugi fluks bocor, rugi gesek dan rugi angin. Untuk menentukan rugi-rugi
daya misalnya rugi daya lilitan baik stator maupun rotor sulit untuk diketahui,
demikian juga dengan rugi gesek dan angin serte daya keluaran yang bersifat
mekanik seperti rugi gesek dan angin serta daya keluaran yang sulit untuk
diketahui melalui pengukuran. Untuk itu perlu cara lain untuk menghitug daya
tersebut salah satu cara yang banyak digunakan adalah dengan menggunakan teori
diagram lingkaran motor induksi. Dari teori tersebut dapat diketahui besarnya
seluruh daya mekanik keluaran dari motor induksi baik secara langsung dengan
peritungan ataupun tidak langsung menggunakan diagram lingkaran. Disamping
dengan menggunakan diagram lingkaran motor induksi juga bisa dengan melihat
rangkaian e3kvalennya dimana rangkaian ekivalen moto induksi mirip dengan
rangkaian ekivalen transformator. Perbedaannya adalah terletak pada sisi sekunder
pada trafo dan sisi rotor pada motor. Pada transformator keluarannya berupa
besaran listrik dan tidak ada gerakan sehingga rangkaian ejivalen trafo pada sisi
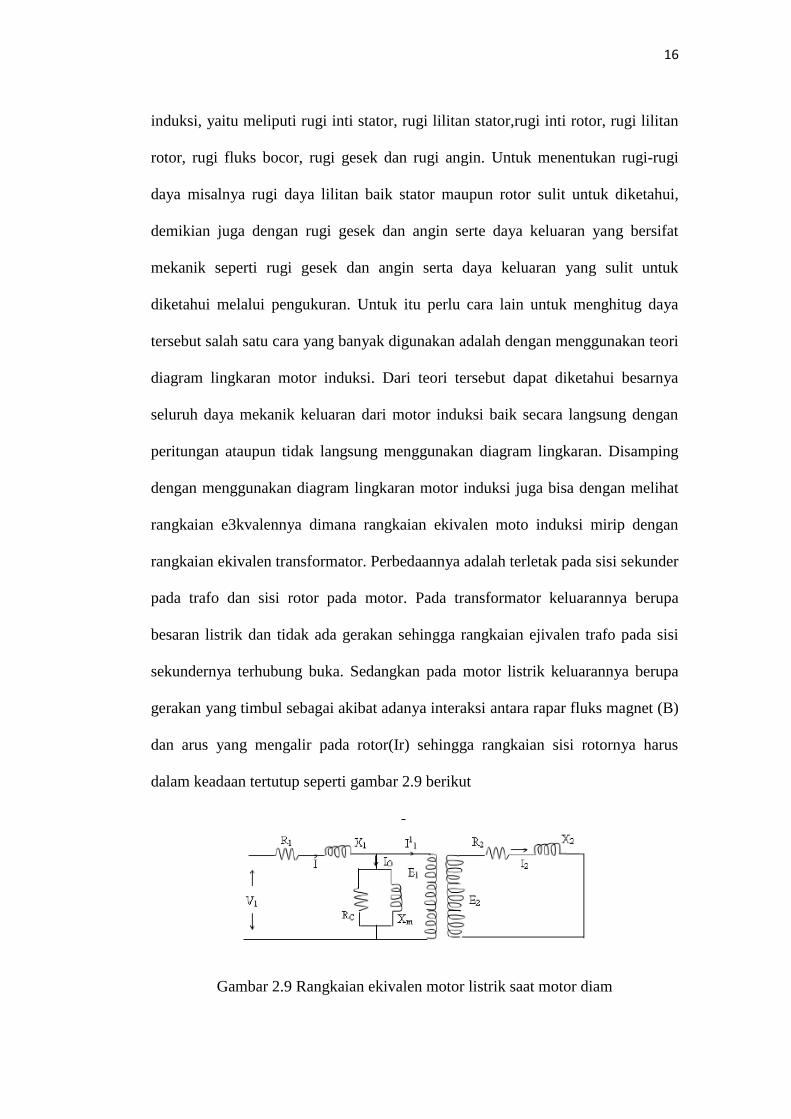
sekundernya terhubung buka. Sedangkan pada motor listrik keluarannya berupa
gerakan yang timbul sebagai akibat adanya interaksi antara rapar fluks magnet (B)
dan arus yang mengalir pada rotor(Ir) sehingga rangkaian sisi rotornya harus
dalam keadaan tertutup seperti gambar 2.9 berikut
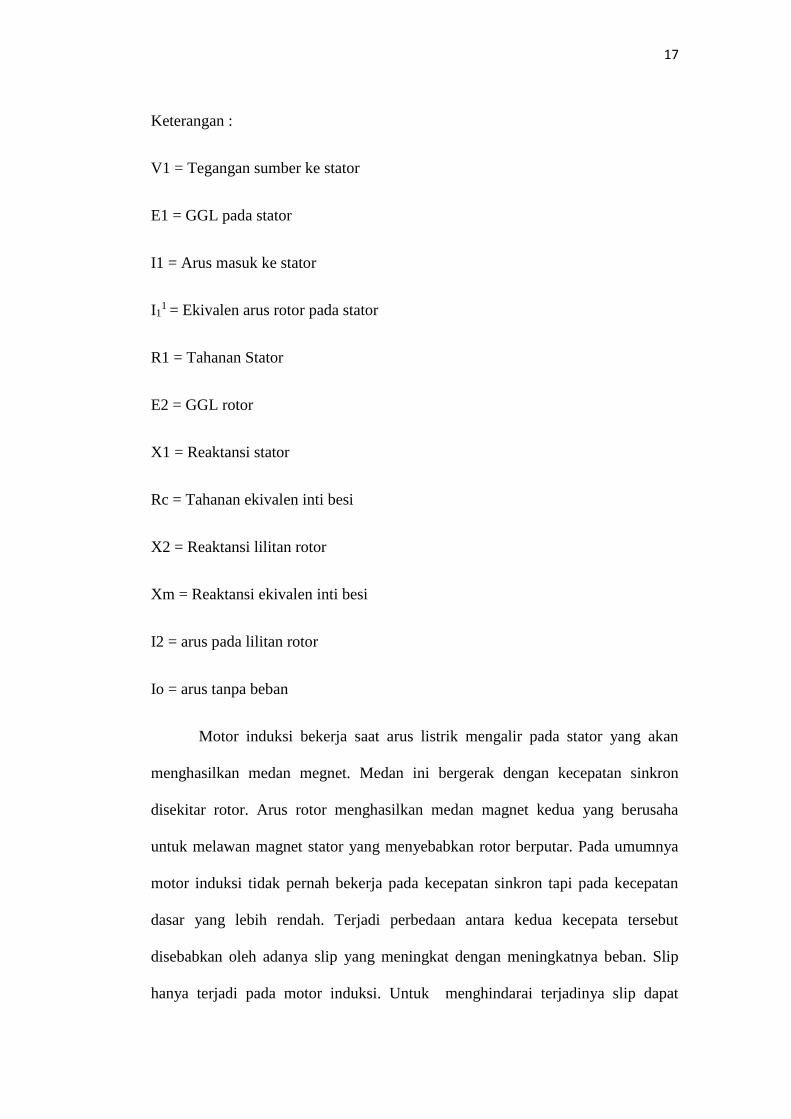
Gambar 2.9 Rangkaian ekivalen motor listrik saat motor diam
17
Keterangan :
V1 = Tegangan sumber ke stator
E1 = GGL pada stator
I1 = Arus masuk ke stator
I11 = Ekivalen arus rotor pada stator
R1 = Tahanan Stator
E2 = GGL rotor
X1 = Reaktansi stator
Rc = Tahanan ekivalen inti besi
X2 = Reaktansi lilitan rotor
Xm = Reaktansi ekivalen inti besi
I2 = arus pada lilitan rotor
Io = arus tanpa beban
Motor induksi bekerja saat arus listrik mengalir pada stator yang akan
menghasilkan medan megnet. Medan ini bergerak dengan kecepatan sinkron
disekitar rotor. Arus rotor menghasilkan medan magnet kedua yang berusaha
untuk melawan magnet stator yang menyebabkan rotor berputar. Pada umumnya
motor induksi tidak pernah bekerja pada kecepatan sinkron tapi pada kecepatan
dasar yang lebih rendah. Terjadi perbedaan antara kedua kecepata tersebut
disebabkan oleh adanya slip yang meningkat dengan meningkatnya beban. Slip
hanya terjadi pada motor induksi. Untuk menghindarai terjadinya slip dapat
18
dipasang sebuau cincin geser /slip ring dan motor tersebut dinamakan motor
cincin geser atau slip ring motor.
2.2.2 Konstruksi Motor Induksi
Komponen utama dari motor adalah sebagai berikut :
a. Rotor terdiri dari dua jenis
1. Rotor Sangkar tupai, terdiri dari batang penghantar tebal yang
diletakkan dalam petak-petak atau slot paralel. Batang- batang tersebut
diberi hubung pendek pada kedua ujungya dengan alat cincin
hubungan pendek.
2. Rotor belitan yang memiliki 3 fasa, lapisan ganda, dan terdistribusi.
Dibuat melingkar sebanyak kutub stator. Tiga fasa digulungi kawat
pada bagian dalamnya dengan ujung lainnya dihubungkan dengan ke
cincin kecil yang dipasang pada batang as dengan sikat yang
menempel padanya.
b. Stator, dibuat dari sejumlah stamping dan slots untuk membawa gulungan
tiga fasa. Gulungan ini dilingkarkan untuk sejumlah kutub tertentu dan
diberi spasi geometri sebesar 120 0 . Pada bagian stator terdapat beberapa
slot yang merupakan tempat kawat (konduktor) dari tiga kumparan tiga
fasa yang disebut kumparan stator, yang masing-masing kumparan
mendapatkan suplai arus tiga fasa. Stator terdiri dari plat besi yang disusun
sama besar dengan rotor dan pada bagian dalam mempunyai banyak alur-
alur yang diberi kumparan kawat tembaga yang bersiolasi. Kumparan
19
tersebut akan menghasilkan flux magnet putar karena flux magnet putar
pada kumparan stator.
............................................................................ (2.2)
Dimana :
Ns = kecpatan sinkron (rpm)
F = frekueni (Hz)
P = jumlah pasng kutub
Pada bagian stator terdapat :
a. Bodi motor
b. Inti kutub magnet
c. Sikat
d. Komutator
e. Lilitan jangkar
a. Bodi motor
Fungsi utama dari bodi motor adalah sebagai tempat mengalirnya flux
magnet yang dihasilkan kutub-kutub magnet. Selain itu bodi motor ini juga
berfungsi sebagai tempat untuk meletakan alat-alat tertentu dan melindungi
bagian mesin lainnya. Biasanya pada motor terdapat name plate yang bertuliskan
spesifikasi umur dari motor.
20
b. Inti kutub magnet
Flux magnet yang terdapat pada motor arus searah dihasilkan oleh kutub
magnet buatan yang dibuat dengan prinsip elektromagnetik. Lilitan penguat
magnet ini berfungsi untuk mengalirkan arus listrik agar terjadi proses
elektromagnetik.
c. Sikat
Fungsi dari sikat adalah sebagai jembatan bagi aliran arus dari sumber.
Disamping itu sikat juga berperan untuk terjadinya komutasi. Sikat-sikat akan aus
selama beroperasi, arus yang dizinkan ditentukan oleh konstruksi dari ganggan
sikat. Bagian puncak sikat diberi plat tembaga yang berfungsi untuk mendapatkan
kontak yang baik antara sikat dan dinding ganggang sikat.
d. Komutator
Komutator berfungsi sebagai penyearah mekanik yang bersama-sama
dengan sikat membuat suatu kerja sama yang disebut komutasi. Supaya
menghsilkan penyearah yang lebih baik maka komutator yang digunakan
hendaknya dalam jumlah yang besar. Setiap belahan segmen komutator berbentuk
lempengan. Disamping penyearah mekanik komutator juga berfungsi untuk
mengumpulkan ggl induksi yang terbentuk pada sisi-sisi kumparan. Oleh karena
itu komutaor dibuat dari konduktor.
Motor induksi dapat diklasifikasikan menjadi dua kelompok yaitu :
21
a. Motor induksi satu fasa
Motor ini hanya memiliki satu gulungan stator. Beroperasi dengan
pasokan daya satu fasa, memiliki sebuah motor sangkar tupai dan membutuhkan
sebuah alat untuk menghidupkan motornya. Motor indukis satu fasa adalah motor
yang paling umum digunakan pada peralatan rumah tangga seperti kipas angin,
mesin cuci dan lain-lain.
b. Motor indusksi tiga fasa
Medan magnet yang dihasilkan oleh pasokan tiga fasa yanh seimbang.
Motor tersebut meimiliki kemampuan daya yang tinggi, dapat berupa sangkar
tupai.
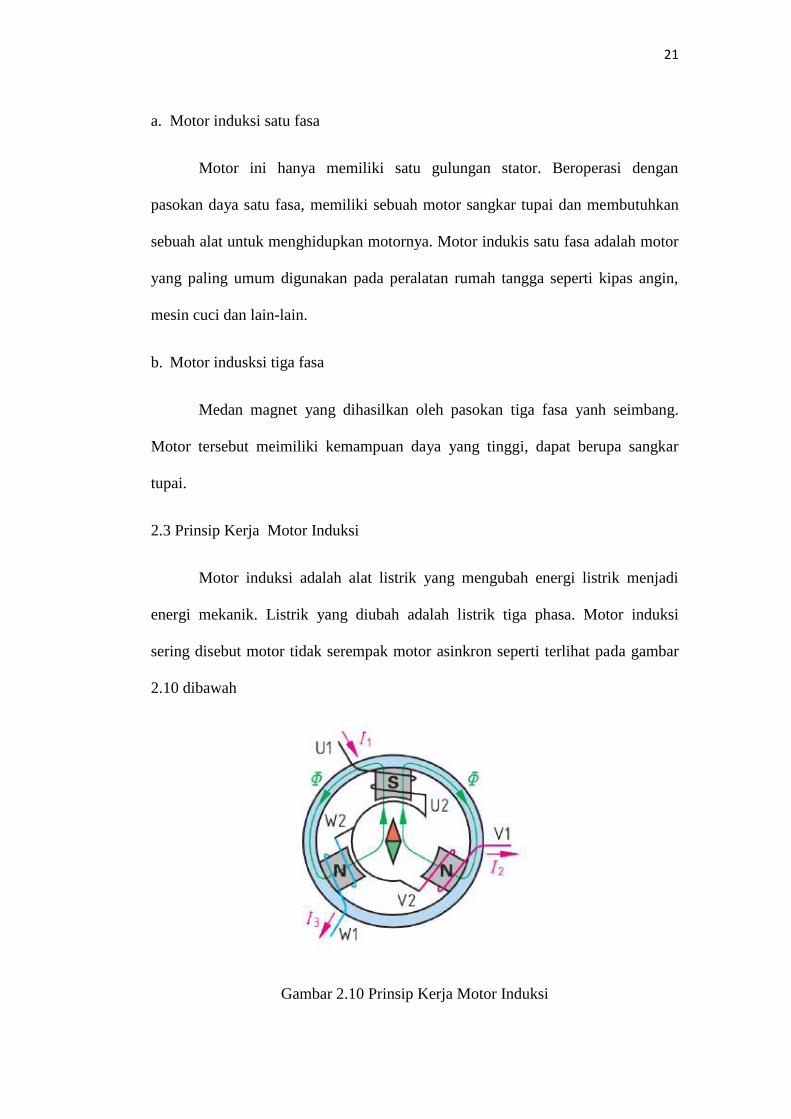
2.3 Prinsip Kerja Motor Induksi
Motor induksi adalah alat listrik yang mengubah energi listrik menjadi
energi mekanik. Listrik yang diubah adalah listrik tiga phasa. Motor induksi
sering disebut motor tidak serempak motor asinkron seperti terlihat pada gambar
2.10 dibawah
Gambar 2.10 Prinsip Kerja Motor Induksi
22
Ketika tegangan phasa U masuk belitan stator menjadikan kutub S (selatan), garis-
garis gaya magnet mengalir melalui stator. Sedangkan dua kutub lainnya adalah N
(utara) untuk phasa V dan phasa W. Kompas akan saling tarik menarikdengan
kutub S. Selanjutnya kutub S pindah ke phas V, kompas berputar 120 0 dilanjutkan
kutub S pindah ke phasa W sehingga pada belitan stator timbul medan magnet
putar. Buktinya kompas akan memutar lagi menjadi 240 0 . Kejadian berlangsung
silih berganti membentuk medan magnet putar sehingga kompas berputar dalam
satu putaran penuh, proses ini berlangsung terus-menerus. Dalam motot induksi
kompas digantikan oleh sangkar yang akan berputar pada porosnya. Karena ada
perbeadaan antara medan putar stator dengan putaran rotor maka motor ini disebut
motor tidak serempak atau asinkton.
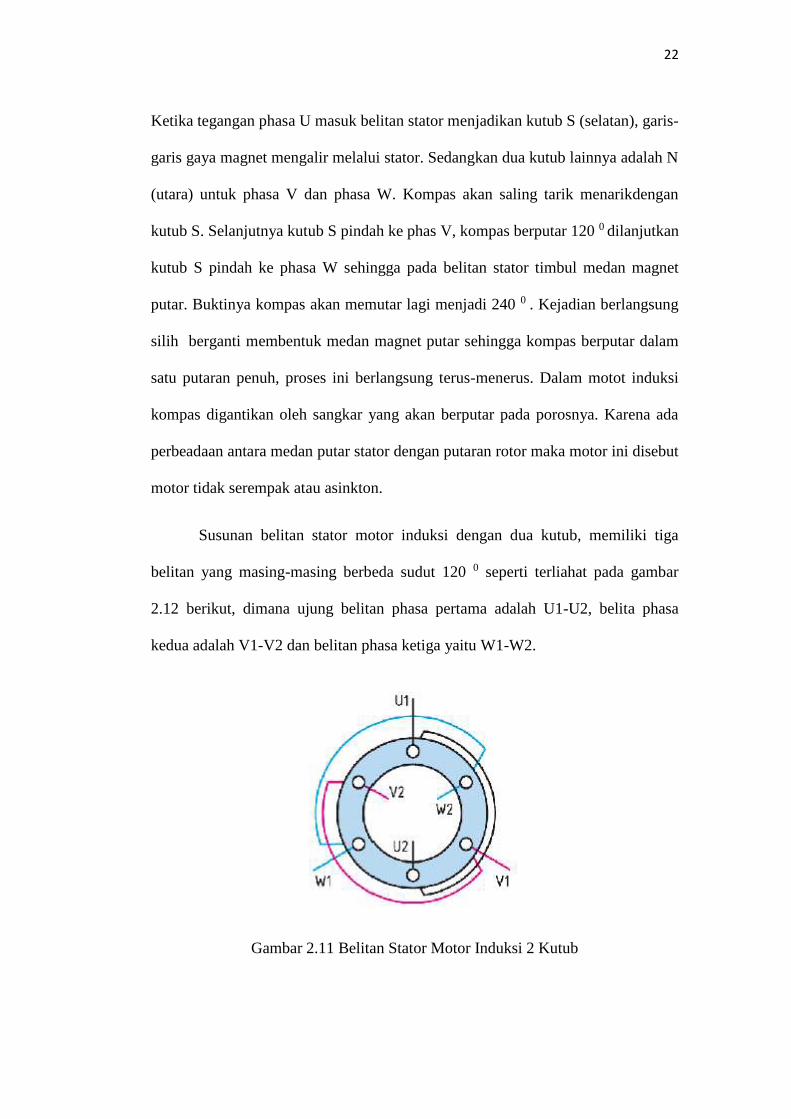
Susunan belitan stator motor induksi dengan dua kutub, memiliki tiga
belitan yang masing-masing berbeda sudut 120 0 seperti terliahat pada gambar
2.12 berikut, dimana ujung belitan phasa pertama adalah U1-U2, belita phasa
kedua adalah V1-V2 dan belitan phasa ketiga yaitu W1-W2.
Gambar 2.11 Belitan Stator Motor Induksi 2 Kutub

23
Prinsip kerja motor induksi dijelaskan dengan gelombang sinusoida sebagai
berikut
Gambar 2.12 Bentuk Gelombang Sinusoida dan Timbulnya Medan
Magnet pada Stator
1. Saat disudut 0 0 arus I1 bernilai positif dan arus I2 dan arus I3 bernilai negatif
dalam hal ini belitan V2 U1 dan W2 bertanda silang, dan belitan V1 U2 dan W1
bertanda titik. Terbentuk flux magnet pada garis horizontal sudut 0 0 kutub selatan
dan kutub utara.
2. Saat sudut 120 0 arus I2 bernilai positif sedangan arus I1 dan I3 bernilai negatif
dalam hal ini belitan W2 V1 dan U2 bertanda silang dan kawat W1 V2 dan U1
bertanda titik. Garis flux magnet kutub selatan dan utara bergeser 120 0 darai
posisi awal.
3. Saat sudut 240 0 arus I3 bernilai positif I1 dan I2 bernilai negatif, belitan U2 W1
dan V2 bertanda silang, dan kawt U1 W2 dan V1 bertanda titik. Garik flux amgnet
kutub S dan N bergeser 120 0 dari posisi kedua.
24
4. Saat sudut 360 0 posisi ini sama dengan posisi sudut 0 0 dimana kutub S dan N
kembali ke posisi awal
Dari keempat kondisi diatas saat sudut 00, 1200, 2400, 3600, dapat
dijelaskan tebentuknya medan putar pada stator, medan magnet putar stator akan
memotong belitan rotor. Kecepatan medan putar stator sering disebut kecepatan
sinkron dan tidak dapat diamati dengan alat ukur tetapi dapat dihitung secara
teoritis besarnya. Rotor ditempatkan didalam rongga stator sehingga garis medan
magnet putar stator akan memotong belitan rotor. Rotor motor induksi adalah
beberapa batang penghantar yang ujung-ujungnya dihubung singkatkan
menyerupai sangkar tupai seperti terlihat pada gambar 2.11 dibawah dimana
kejadian ini menyebabkan pada rotor timbul induksi eleketromagnetis. Medan
magnet putar dari stator saling berinteraksi dengan medan magnet rotor terjadi lah
torsi putar yang menyebebkan rotor berputar.
Kecepatan medan magnet putar pada stator
........................................................................................... (2.2)
............................................................................ (2.3)
Ns = kecepatan medan stator
Nr = kecepatan medan rotor
Slip = selisih kecepatan sator dan rotor
25
2.4 Keunggulan dan kelemahan dari Motor Induksi
Motor induksi adalah motor yang paling banyak digunakan di industri, hal
ini dikarenakan motor induksi mempunyai banyak keunggulan dan kelemahan
antara lain :
A. Kelebihan
a. Bentuknya sederhana, mempunyai rangka yang kokoh, kuat dan tidak musah
rusak
b. Efesiensinya tinggi pada keadaan normal, tidak membutuhkan sikat sehingga
rugi-rugi gesekan dapat dikurangi
c. Perawatannya lebih mudah
d. Pada saat mulai beroperasi tidak membutuhkan tambahan peraltan khusus
B. Kelemahan
1. Pengaturan kecepatan sangat mempengaruhi efesiensinya
2. Kecepatan akan berkurang jika bebannya bertambah
3. Torsi awalnya lebih rendah dari pada torsi awal motor DC Shunt
2.5 Daya Listrik
Daya adalah energi yang dikeluarkan untuk melakukan usaha. Dalam sistem
tenaga lsitrik daya merupakan jumlah energi lsitrik yang digunakan untuk
melakukan kerja atau usaha. Daya listrik biasanya dinyatakan dalam satuan Watt
atau Horsepower (HP), Horsepower merupakan satauan daya listrik dimana 1 HP
setara dengan 746 Watt atau ibft/second. Sedangkan Watt merupakan unit daya
26
lsitrik dimana satu watt memiliki daya setara dengan daya yang dihasilkan oleh
perkalian arus dan tegangan. Sehingga besar daya dinyatakan
................................................................................................. (2.4)
Dimana : P = daya (Watt)
V = Tegangan (Volt)
I = Arus (Ampere)
Adapun pengertian daya yaitu : daya aktif (nyata), daya reaktif, dan daya semu
a. Daya aktif (daya nyata) , daya aktif adalah daya yang diubah menjadi daya
thermis mekanis dan langsung dapat dinikmati oleh konsumen. Satuannya watt
(W), kilowatt (KW), dan megawatt (MW).
.......................................................................(2.5)
............................................................ (2.6)
b. Daya Reaktif, adalah jumlah daya yang diperlukan untuk pembentukan medan
magnet. Pembentukan medan magnet akan terbentuk fluks medan magnet. Contoh
daya yang menghasilkan daya reaktif adalah transformator, motor, lampu pijar.
Satuan untuk daya reaktif adalah Var
......................................................................... (2.7)
............................................................... (2.8)
27
c. Daya nyata, adalah daya yang dihasilkan oleh perkalian antara teganagan rms
dan arus rms dalam suatu jaringan atau daya merupaka hasil penjumlahan
trigonometri daya aktif dan daya reaktif. Satuan daya nyata adalah VA
Gambar 2.13 Segitiga Daya
2.6 Daya pada Motor Induksi
Pada motor induksi terjadi perubahan energi listrik menjadi energi mekanik
dalam bentuk putaran rotor. Pada motor induksi daya mekanik yang dihasilkan
digunakan untuk berbagai keperluan sesuai dengan keinginan. Daya pada motor
listrik dapat dihitung menggunakan perhitungan perfasa ataupun 3 phasa yang
dapat dirumuskan sebagai berikut :
.............................................................................. (2.9)
..................................................................................... (2.10)
Harga tegangan fasa (Vp) adalah
........................................................................................... (2.11)
Dimana : P1 = Daya aktif satu fasa(watt)
28
P3 = daya aktif tifa fasa
VL= Tegangan Line-line (volt)
Vp = Tegangan perfasa (Volt)
2.7 Rugi-rugi Pada Motor Induksi
Seperti diketahui bahwa motor-motor listrik adalah suatu alat yang
digunakan untuk mengkonfirmasi energi listrik menjadi energi mekanis. Keadaan
ideal dalam sistem konversi energi yaitu mempunyai daya output tepat sama
dengan daya input yang dapat dikatakan efesiensi 100%. Tetapi pada keadaan
yang sebenarnya tentu ada kerugian energi yang menyebabkan efesiensi dibawah
100%. Dalam operasi motor listrik total daya yang diterima sama dengan daya
yang diberikan, ditambah dengan kerugian daya yang terjadi atau
....................................................... (2.12)
Dimana : Pin = Total Daya yang diterima
Pout = Daya yang diberikan untuk melakukan kerja
Prugi-rugi = Total kerugian yang dihasilkan oleh motor
2.5.1 Rugi-rugi Inti
Rugi-rugi init dihasilkan oleh stator dan rotor akibat timbulnya efek
hesteris dan arus pusar (eddy current). Timbulnya rugi-rugi ini ketika besi jangkar
atau struktur rotor mengalami perubahan fluks terhadap waktu.
2.5.2 Rugi-rugi Mekanik
29
Rugi-rugi gesekan atau mekanik adalah energi mekanik yang dipakai dalam
motor listrik untuk mengurangi gesekan bantalan poros, gesekan sikat melawan
komutator atau slip ring, gesekan bagian yang berputar terhadap angin terutama
pada daun kipas pendingin.
2.8 Efisisensi Daya Motor
Efesisensi daya motor adalah perbandingan daya output dengan daya input.
Daya output dinyatakan sebagai daya input dikurangi rugi-rugi pada motor
............................................ (2.13)
Efisiensi motor tidak distandarisasi masing-masing pabrik pembuat motor
memproduksi motor dengan harga efisiensi sesuai dengan pertimbangan aspek
ekonomis dsn teknis. Selain itu efisiensi motor juga berbeda apabila kapasitasnya
berbeda, makin besar kapasitas makin tinggi effisiensinya.Perubahan kecepatan
pada motor juga akan mempengaruhi nilai efisiensinnya
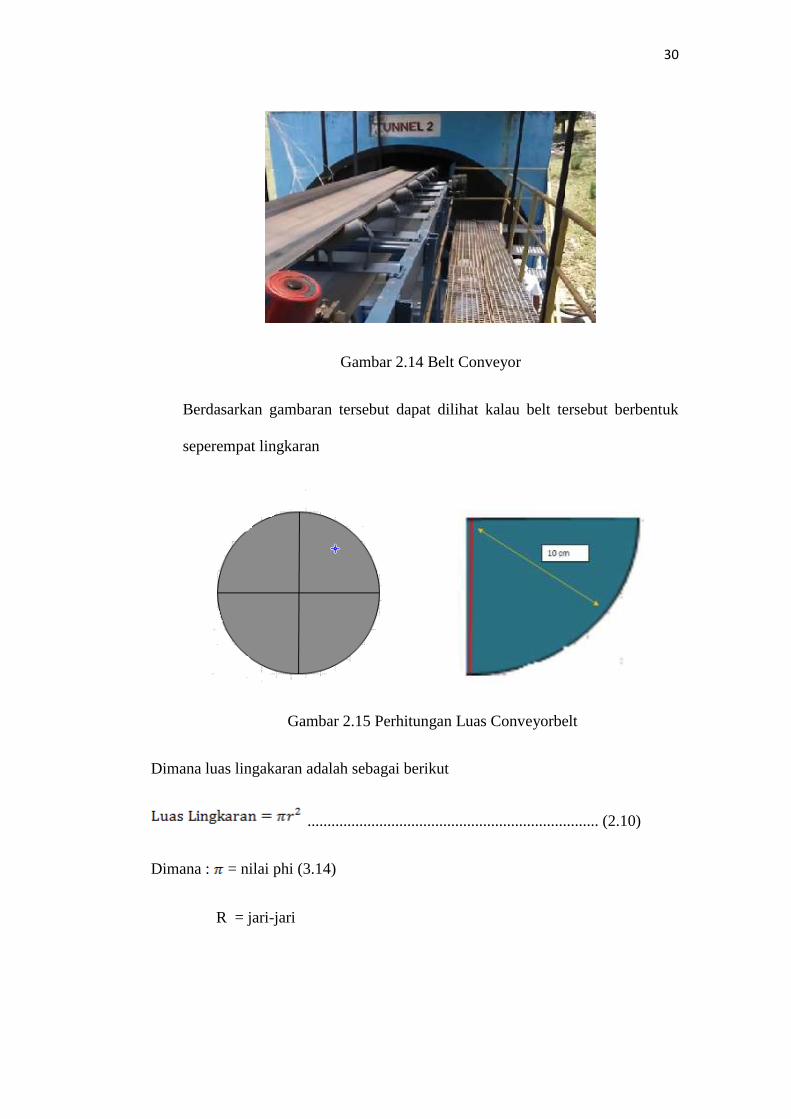
2.9 Cara Menentukan Volume Daya Angkut Pada Belt Conveyor
Beltconveyor pada Ombilin Minning Trainning College mempunyai kedalaman
lengkung belt seperti terlihat pada gambar 2.13 berikut
30
Gambar 2.14 Belt Conveyor
Berdasarkan gambaran tersebut dapat dilihat kalau belt tersebut berbentuk
seperempat lingkaran
Gambar 2.15 Perhitungan Luas Conveyorbelt
Dimana luas lingakaran adalah sebagai berikut
......................................................................... (2.10)
Dimana : = nilai phi (3.14)
R = jari-jari
31
Setelah didapatkan berapa volume yang dapat ditampung oleh belt tersebut maka
barulah bisa ditentukan berapa beban yang dapat diangkut oleh belt denga
mengkonversikan nilai satuan volume ke satuan berat
Dimana untuk 1 liter = 1 dm3 = 1000 cm3 ..................................... (2.11)
1 Liter = 1 kg = 1 ml .............................................. (2.12)
1 kg= 1000 g .......................................................... (2.13)
(sumber : perhitunngan konversi satuan, volume, dosis, iu, dan berat oleh
Afiesh sp)
2.10 Pemeliharan Motor Induksi
Motor pada umumya terbuat dari baja silikon atau baja gulungan dingin yang
dihilangkan karbonnya, sifat-sifat listrinya tidak berubah. Perawatan yang buruk
dapat memperburuk efisiensi motor karena umur motor dan operasi yang tidak
handal. Sebagai contoh pelumas yang tidak benar dapat menyebabkan
meningktnya gesekan pada motor. Suhu ekstrim, kadar debu yang tinggi, atmosfir
yang korosif, dan kelembapan dapt merusaksifat-sifat bahan isolasi, tekanan
mekanis karena siklus pembebanan dapat mengakibatkan kesalahan
penggabungan.
Perawatan yang tepat dibutuhkan untuk menjaga kinerja motor, perawatan
yang dapat dilakukan berupa :
32
a. Pemeriksaan motor secara teratur untuk pengguanaan bearing dan untuk
kotoran atau debu pada saluran ventilasi motor (untuk menjaga
pendinginan motor)
b. Pemeriksaan kondisi beban untuk meyakinkan bahwa motor tidak
kelebihan atau kekurangan beban. Perubahan pada beban motor dari
pengujian terakhir mengindikasi suatu perubahan pada beban yang
digerakkan
c. Pemeberian pelumas secra teratur, biasanya pabrik pembuat
merekomendasikan untuk waktu dan cara pemberian pelumas. Pelumas
yang tidak cukup dapat menimbulkan masalah
d. Pemeriksaan secara berkala untuk sambungan motor yang benar dan
peralatan yang digerakkan. Sambungan yang tidak benar dapat
mengakibatkan sambunga as dan bearing lebih cepat aus yang
mengkibatkan kerusakan terhadapa motor dan peralatan yang digerakkan
e. Memastikan bahwa kawat pemasok, ukuran kotak terminal terpasang
dengan benar
f. Sambungan-sambungan pada motor dan stater harus diperiksa untuk
meyakinkan kebersihan
g. Penyediaan ventilasi yang cukup dan menjaga agar saluran pendingin
motor bersih untuk membantu penghilangan panan untuk mengurangi
kehilangan yang berlebihan

33
33
BAB III
METODOLOGI PENELITIAN
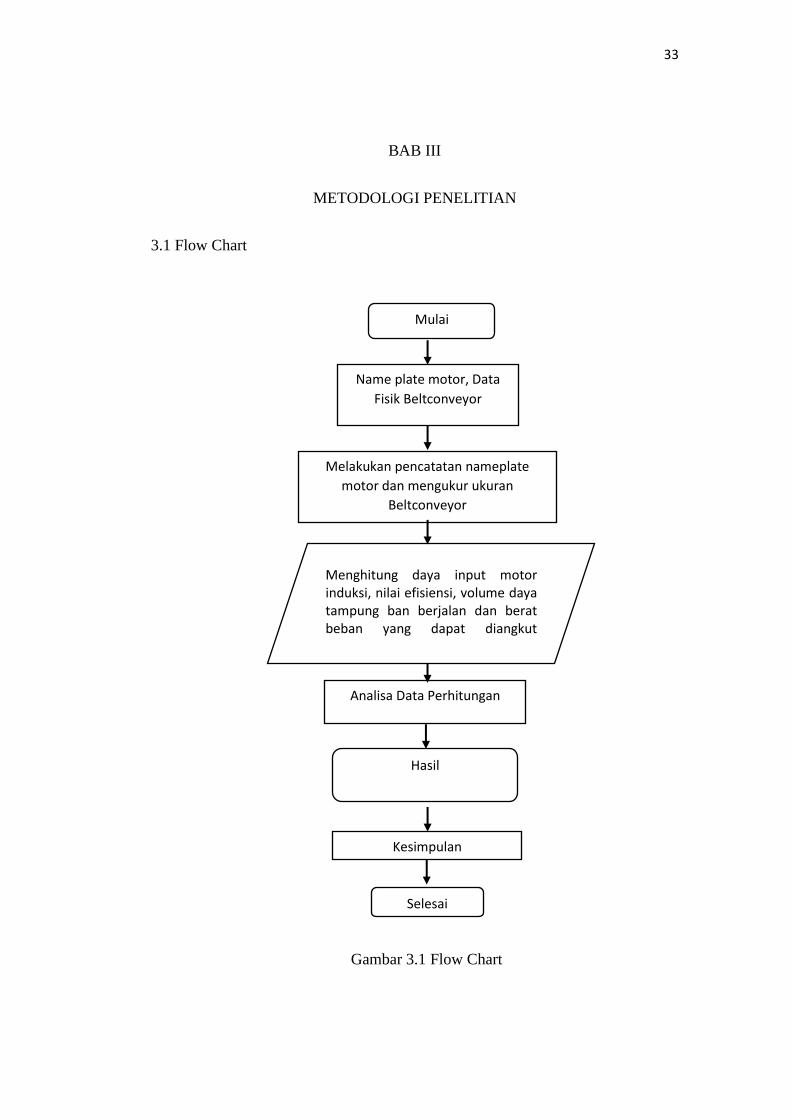
3.1 Flow Chart
Gambar 3.1 Flow Chart
Name plate motor, Data
Fisik Beltconveyor
Melakukan pencatatan nameplate
motor dan mengukur ukuran
Beltconveyor
Menghitung daya input motor induksi, nilai efisiensi, volume daya tampung ban berjalan dan berat beban yang dapat diangkut beltconveyor menggunakan motor induksi 11 kW
Analisa Data Perhitungan
Kesimpulan
Mulai
Selesai
Hasil
34
3.2 Metode Penelitian
Metode penelitian ini menjelaskan menegnai proses pengambilan data
sampai tahap perhitungan dan pembahasan.
3.3 Jenis Penelitian
Penelitian ini dilakukan dengan metode diskriptif analisis, yaitu suatu metode
penelitian yang dilakukan dengan cara mengumpulkan data secara langsung dan
menganalisanya serta mengambil suatu kesimpulan yang dapat digunakan sebagai
proses dasar untuk menentukan berapa kapasitas daya angkut yang dapat dibawa
oleh beltconveyor dengan menggunakan motor induksi 11 kW
3.4 Objek penelitian
Objek penelitian untuk bahan penlitian ini adalah motor induksi tiga fasa
dengan daya 11 kW di Ombilin Minning Trainning College
3.5 Langkah Penelitian
Berdasarkan studi kasus yang dihadapi, maka pada tugas akhir ini akan
membahas tentang berapa berat bean yang dapat diangkut oleh motor dengan daya
11 kW.
Dalam prosedur pengambilan data yang dilakukan untuk mendapatkan data-
data yang lengkap melalui beberapa tahapan yaitu :
3.5.1 Studi Literatur
Tahapan ini mempelajari teori-teori dasar yang menunjang yaitu tenyang
motor induksi tiga fas, beltconveyor
3.5.2 Pengumpulan Data Materi
35
Pada tahapan pengumpulan data penulis akan terjun langsung ke lokasi
untuk mengambil data-data yang dibutuhkan.
3.6 Teknik Pengambilan Data
1. Data Name Plate motor Induksi tiga fasa
2. Data fisik Beltconveyor
Cara pengambilan data dilakukan denngan studi dokumentasi dan teknik
wawancara
3.6.1 Studi Dokumentasi
Yaitu berupa pengambilan data yang berhubungan dengan penelitian
3.6.2 Teknik Wawancara
Data yang diperoleh berdasarkan dari keterangan dari karyawan di
Ombilin Minning Trainning College
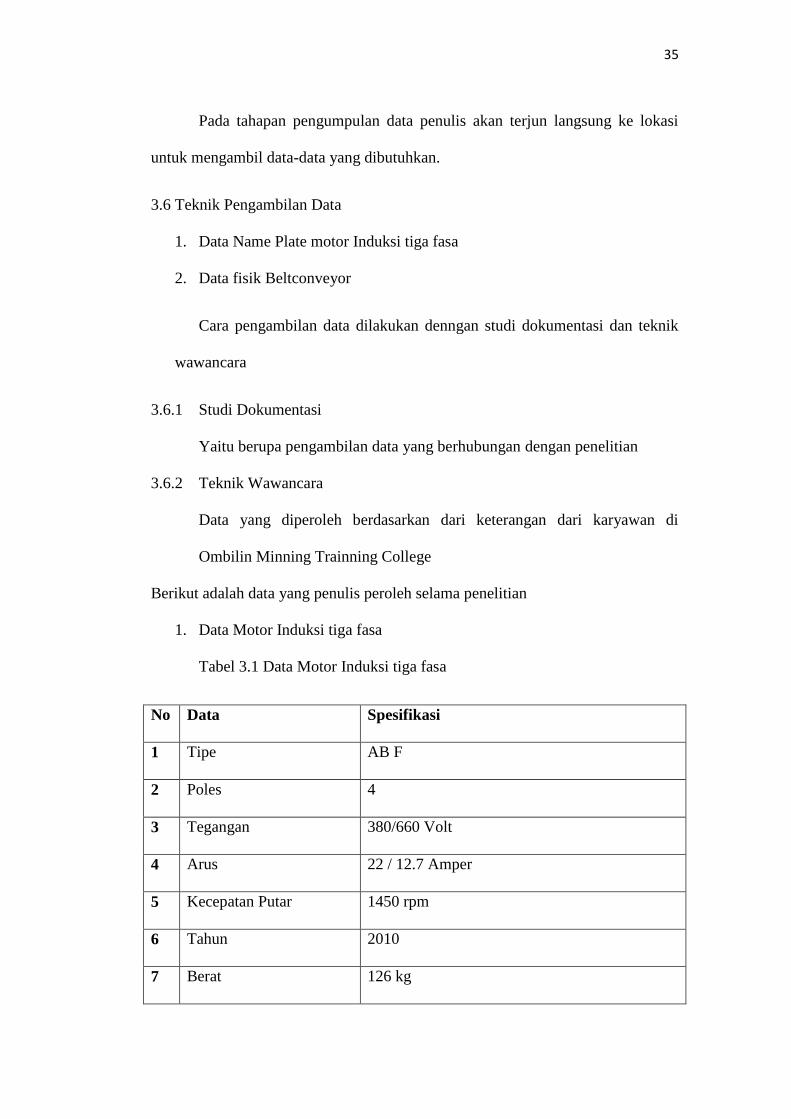
Berikut adalah data yang penulis peroleh selama penelitian
1. Data Motor Induksi tiga fasa
Tabel 3.1 Data Motor Induksi tiga fasa
No Data Spesifikasi
1 Tipe AB F
2 Poles 4
3 Tegangan 380/660 Volt
4 Arus 22 / 12.7 Amper
5 Kecepatan Putar 1450 rpm
6 Tahun 2010
7 Berat 126 kg

36
8 Frekuensi 50 Hz
9 Daya 11 Kw
10 Design CNS-2934 C4088
11 No Seri 120406506906
12 Gambar motor induksi 3
phasa
2. Data Fisik Belt Conveyor
No Data Ukuran
1 Panjang belt 20 meter
2 Lebar belt 110 cm
3 Tinggi belt 140 cm
37
4 Dalam lengkung Belt 10 cm
5 Jumlah Beltconveyor Satu beltconveyor miring dan satu
beltconveyor datar
3.7 Teknik Pemecahan Masalah
Dalam tugas akhir ini pemecahan masalah yang dilakukan yaitu dengan cara
menganalsis bagaimana motor yang digunakan dan berapa berat beban yang
dapat diangkut oleh motor pada saat menggerakkan beltconveyor dengan cara
melakukan perhitungan. Perhitungan yang dilakukan berdasarkan landasan
teori yang mendukung sesui dengan pembahasan.
3.8 Analisa Perhitungan
Perhitungan yang dilakukan untuk mengetahui berapa nilai efesinsi motor,
nilai daya input pada motor, dan berpa berat beban yang dapat diangkut oleh
beltconveyor menggunakan motor induksi 11 kW adalah sebagai berikut :
a. Untuk nilai efesiensi daya motor
................................ (3.1)
Dengan :
Pin = Daya Input (watt)
Prugi-rugi = Rugi daya yang dialami saat bekerja
b. Untuk menentukan daya input pad motor induksi adalah sebagai berikut ;

38
............................................................................. (3.2)
Dengan:
= daya tiga fasa
= daya satu fasa
Dimana untuk menentukan nilai satu fasa adalah sebgai berikut :
................................................................. (3.3)
Dengan :
= daya satu fasa
Vp = tegangan antar fasa
Ip= arus antar fasa
c. Untuk menentukan berapa berat beban yang dapat diangkut oleh motor
dengan daya 11 kW adalah dengan menggunakan rumusan sebagai
berikut:
Beban yang dapat angkut beltconveyor = panjang lintasan belt x Volume
daya tampug belt
Untuk vOlume daya daya tampung pada beltconveyor adalah sebagai
berikut :
................................. (3.4)
Dimana:
39
R= jari-jari (m)
3.8 Penarikan Kesimpulan
Penarikan kesimpulan diperoleh dari hasil analisa data dan
perhitungan sehingga dapt ditarik kesimpulan bahwa hasil tersbebut dpat
diterima atau tidak secara teoritis dengan memberikan alasan yang kuat
sesuai isi dari permasalahan yang dihadapi dan merupakan hasil yang
dapat dipertanggung jawabkan .
44
BAB IV
ANALISA DAN PERHITUNGAN
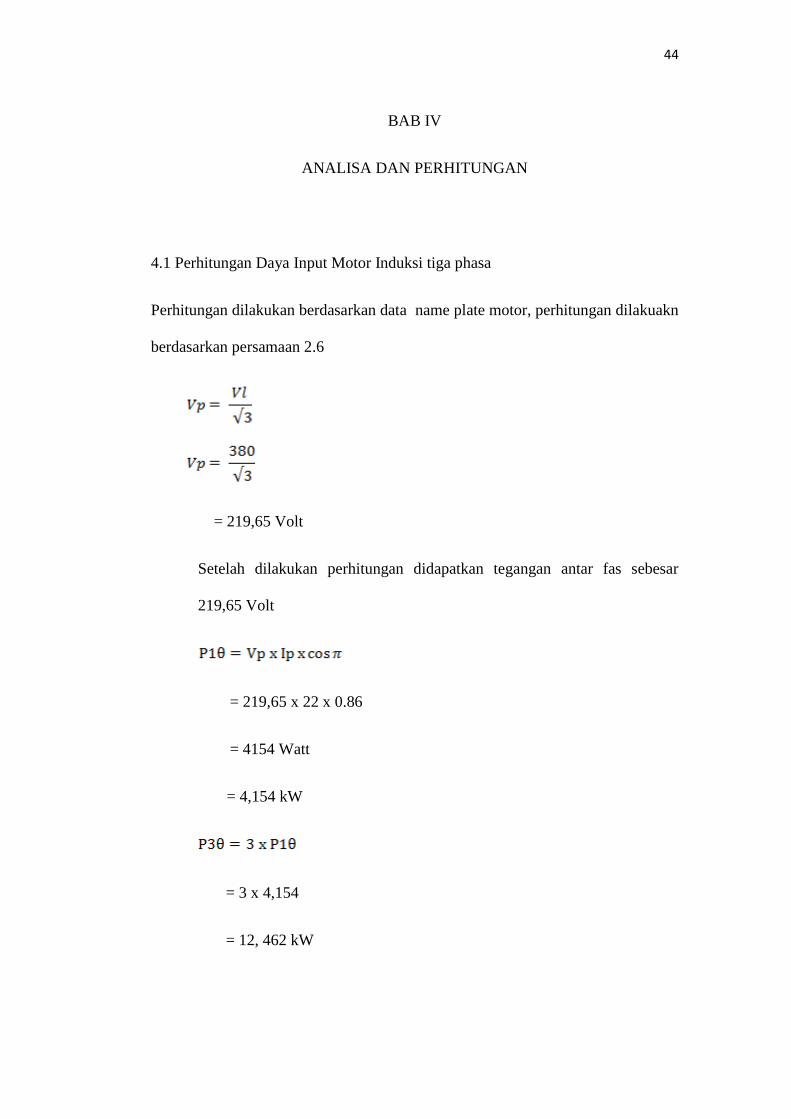
4.1 Perhitungan Daya Input Motor Induksi tiga phasa
Perhitungan dilakukan berdasarkan data name plate motor, perhitungan dilakuakn
berdasarkan persamaan 2.6
= 219,65 Volt
Setelah dilakukan perhitungan didapatkan tegangan antar fas sebesar
219,65 Volt
= 219,65 x 22 x 0.86
= 4154 Watt
= 4,154 kW
= 3 x 4,154
= 12, 462 kW
45
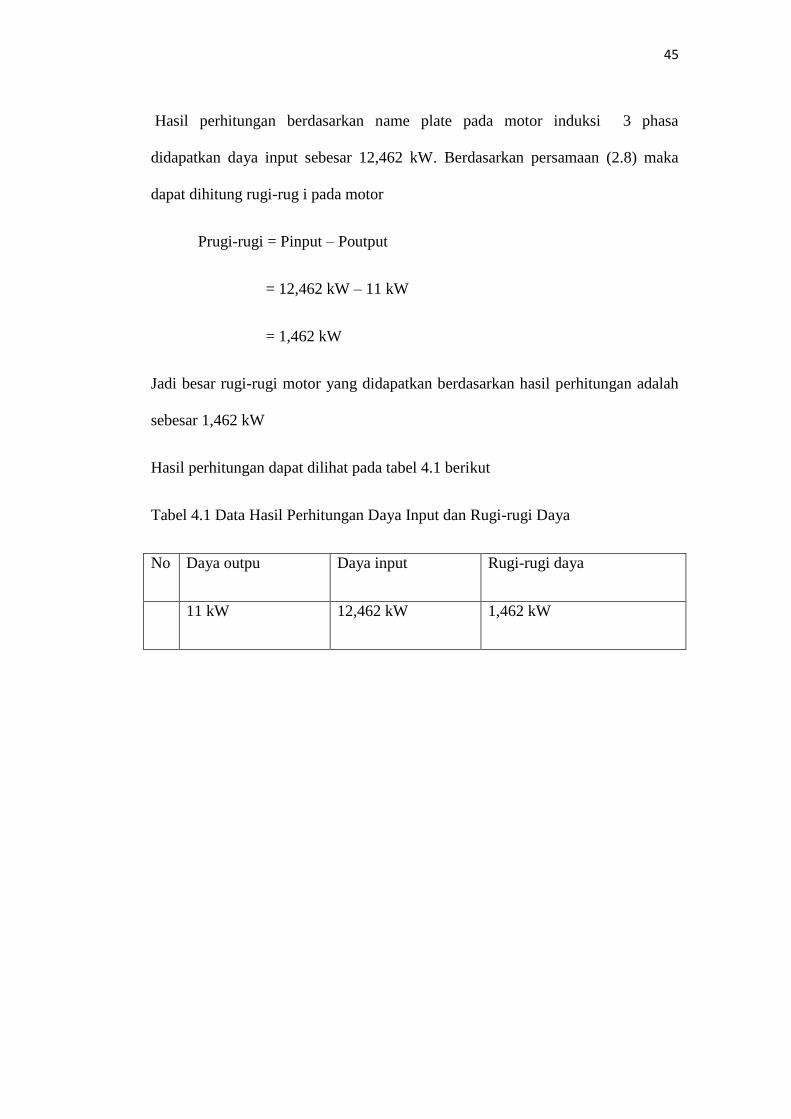
Hasil perhitungan berdasarkan name plate pada motor induksi 3 phasa
didapatkan daya input sebesar 12,462 kW. Berdasarkan persamaan (2.8) maka
dapat dihitung rugi-rug i pada motor
Prugi-rugi = Pinput – Poutput
= 12,462 kW – 11 kW
= 1,462 kW
Jadi besar rugi-rugi motor yang didapatkan berdasarkan hasil perhitungan adalah
sebesar 1,462 kW
Hasil perhitungan dapat dilihat pada tabel 4.1 berikut
Tabel 4.1 Data Hasil Perhitungan Daya Input dan Rugi-rugi Daya
No Daya outpu Daya input Rugi-rugi daya
11 kW 12,462 kW 1,462 kW
46
4.3 Perhitungan Efisiensi Motor
Berdasarkan persamaan (2.9) untuk mendapatkan harga efisiensi
didapatkan dari hasil daya input dikurangi rugi-rugi daya pada motor induksi.
= 88,26 %
Jadi berdasarkan persamaan (2.9) didapatkan hasil efesiensi motor yaitu sebesar
88,26%
4.4 Tabel Data Motor Induksi tiga Phasa
Setelah melakukan perhitungan maka dapat dilihat tabel hasil perhitungan
dibawah ini, dapat dilihat bahwa terdapat perbedaan antara daya yang terpasang
dengan daya hasil perhitungan
Tabel 4.2 Data Motor Induksi 3 Phasa yang Terpasang Sebagai penggerak
Beltconveyor
No Data Motor Induksi yang Terpasang
1 Daya 11 Kw
2 Tegangan 380 Volt
Sumber : ombilin mining trainning colloge
47
4.5 Analisa Hasil Perhitungan dengan Data Kondisi di Lapangan
Setelah melihat perbandingan dari tabel 4.2 diatas maka terlihat perbedaan
dimana hasil dari data perhitungan dapat dilihat pada tabel 4.2 berikut
Tabel 4.3 Tabel Perbandingan Daya Terpasang dan Daya Terhitung
No Daya Output yang Terpasang Daya Input
1 11 kW 12, 462 kW
Berdasarkan hasil perhitungan daya pada betlconveyor di Ombilin Minning
Trainning College Sawahlunto dapatlah hasil pembahasan yaitu sebagai berikut :
1. Daya Keluaran motor dipengaruhi oleh besar kecilnya arus motor dan
faktor daya untuk tegangan yang konstan. Daya input motor yang didapat
dari hasil perhitungan adalah sebesar 12,462 kW dengan arus 22 Ampere
dan tegangan 380 Volt dan fakotr daya 0,86. Jelas terlihat bahwa semakin
besar arus dan faktor daya maka daya masukan daya motor tersebut akan
semakin membesar, dan begitu juga sebaliknya apabila arus dan faktor
dayanya kecil maka daya masukan motor akan semakin ini. Ini berarti
bahwa daya masukan motor berbanding lurus terhadapa tegangan (volt),
arus (A), dan faktor daya (cos ).
2. Daya untuk rugi-rugi pada motor yang didapat dari hasil perhitungan
adalah sebesar 1,462 kW
3. Efisiensi daya yang dihasilkan dari perhitungan berdasarkan perbandingan
daya keluaran dapat dinyatakan sebagai daya masukan dikurangi daya
48
rugi-rugi pada motor. Daya motor yang baik itu adalah apabila nilai
efisiensi motor tersebut berkisar antara 80% sampai 100%, apabila nilai
efisiensi motor sudah mencapai nilai tersebut makan bisa dikatakan bahwa
motor tersebut penggunaannya sangat efektif. Pada perhitungan yang
dilakukan terhadap motor induksi tiga phasa sebagai penggerak
beltconveyor untutk simulasi sistem pengangkutan batu bara di Ombilin
Minning Trainnig College didapatkan hasil efisiensi motor yang terpasang
sebesar 88,26 %. Dapat dikatakan motor yang ada pada Ombilin Minning
Trainning College tersebut efisien dalam arti bahwa penggunaan motor
sebagai penggerak beltconveyor efektif
4.5 Perhitungan Beban yang Dapat di angkut pada Beltconveyor
Tabel 4.4 Data Beltconveyor
No Data Ukuran
1 Panjang belt 20 meter
2 Lebar belt 110 cm
3 Tinggi belt 140 cm
4 Dalam lengkung Belt 10 cm
Untuk menentukan volume pada belt maka digunakanlah rumusan berdasarkan
persamaan 2.10 yaitu sebagai berikut
49
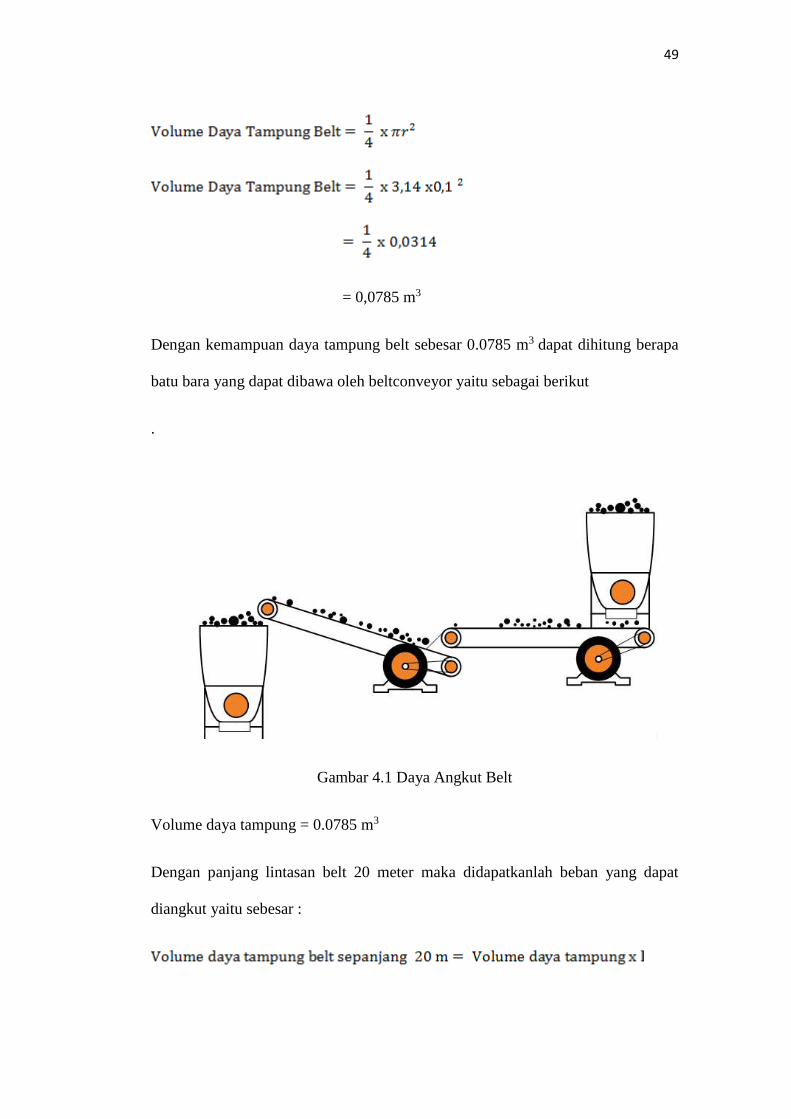
= 0,0785 m3
Dengan kemampuan daya tampung belt sebesar 0.0785 m3 dapat dihitung berapa
batu bara yang dapat dibawa oleh beltconveyor yaitu sebagai berikut
.
Gambar 4.1 Daya Angkut Belt
Volume daya tampung = 0.0785 m3
Dengan panjang lintasan belt 20 meter maka didapatkanlah beban yang dapat
diangkut yaitu sebesar :
50
= 0,157 m3
= 0,0785 x 40
= 3,14 m3
Untuk menghitung berapa beban yang dapat diangkut oleh beltconveyor
berdasarkan persamaan (2.11, 2.12, 2.13 ) maka didapatkan hasil berat beban yang
dapat diangkut oleh motor adalah sebagai berikut 3,14 m3 = 3140 dm3
3140 dm3 = 3140 Liter
3140 Liter = 3140 kg
Berdasarka hasil perhitungan tersebut didapatkan berat beban yang dapat diangkut
oleh beltconveyor menggunakan motor induksi 11 kW adalah sebesar 3140 kg,
Untuk sebuah motor dapat menggerakan beltconveyor itu syaratnya adalah torsi
motor lebih besar dari torsi beban, dimana untuk nilia torsi beban dapat ditentukan
dengan cara berikut.
51
Untuk membuktikan bahwa dengan motor induksi tiga fasa tersebut bisa
menggerakkan beltconveyor dengan berat beban sebesar 3140 kg dapat dilihaat
berdasarkan perhitungan torsi pada motor tersebut, dimana untuk menggerakkan
sebuah beban torsi motor harus lebih besar dari torsi beban yang akan diangkut.
1. Untuk nilai torsi motor
2. Untuk nilai torsi beban
`
52
Berdasarkan hasil perhitungan tersebut didapatkan nilai Tm>dari nilai Tl yaitu
72,4 Nm > 63,7 Nm
Berdasarkan hasil perhitungan tersebut maka didapatkanlah data sebagai berikut
1. Volume daya tampung pada belt tersebut adalah sebesar 0,0785 m3
2. Untuk beban yang dapat ditampung dengan panjang beltconveyor 20
meter adalah sebesar 157 kg
3. Untuk beban yang yang dapat ditampung denan panjang beltconveyor 40
meter adalah sebesar 3140 kg
4. Untuk nilai torsi motor adalah sebesar 7,2 Nm
53
53
BAB V
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil perhitungan yang telah diuraikan pada studi estimasi daya
perhitungan kapasitas daya angkut beltconveyor untuk daya motor 11 kW dapat
diambil kesimpulan sebagai berikut :
1. Dalam pemanfaantan motor sebagai mesin penggerak, salah satunya
penggeraka beltconveyor maka ukuran motor tersebut harus sesuai dengan
beban yang akan digerakkan.
2. Besarnya daya input tidak sama dengan besarnya daya output karena pada
saat bekerja motor tersebut mengalami rugi-rugi. Pada motor di Ombilin
Minning Trainning College motor mengalami rugi-rugi sebesar 1,462 kW.
Besarnya daya motor dipengaruhi oleh beberapa faktor yaitu besarnya arus
dan berat beban yang akan digerakkan oleh motor tersebut. Semakin besar
arus motor dan berat beban yang digerakkan oleh motor maka akan
semakin besar daya yang akan dikeluarkan oleh motor tersebut. Efesisensi
daya yang dihasilkan dari perhitungan adalah sebesar 88,26 %. Nilai
efesiensi yang baik adalah berkisar dari 80 % - 100 % maka dapat
dikatakan motor yang berada di Ombilin Minning Trainning College
bekerja secara efisien.
Efesisensi daya yang dihasilkan dari perhitungan adalah sebesar 88,26 %.
Nilai efesiensi yang baik adalah berkisar dari 80 % - 100 % maka dapat
54
54
dikatakan motor yang berada di Ombilin Minning Trainning College
bekerja secara efisien.
3. Untuk beban yang dapat diangkut oleh belt sepanjang 40 meter yang
digerakkan oleh motor dengan daya 11 kW berdasarkan perhitungan
adalah sebesar 3140 kg
5.2 Saran
1. Dalam perhitungan yang dilakukan hendaknya lebih banyak menggunakan
referensi tentang perhitungan daya motor induksi dari berbagai sumber
2. Untuk setiap kerusakan pada motor sebaiknya dicatat secara khusus
kemudian diadakan pengelompokan kerusakan agar lebih mudah untuk
menanggulanginya
STUDI ESTIMASI PERHITUNGAN KAPASITAS
ANGKUT BELT CONVEYOR MENGGUNAKAN DAYA
MOTOR 11 kW
TUGAS AKHIR
Sebagai salah satu syarat untuk memperoleh gelar Ahli Madya dari
Politeknik Negeri Padang
DINA NURUL FADILA
BP :1301032051
PROGRAM STUDI TEKNIK LISTRIK
JURUSAN TEKNIK ELEKTRO
POLITEKNIK NEGERI PADANG
2016
DAFTAR GAMBAR
Hal
Gambar 2.1 Komponen Pada Belt Conveyor .................................................................... 7
Gambar2.2 Bagan Jenis-Jenis Conveyor .......................................................................... 8
Gambar 2.3 Bucket Conveyor ........................................................................................... 9
Gambar 2.4 Roller Conveyor .......................................................................................... 10
Gambar 2.5 Pneumatic Conveyor ................................................................................... 11
Gambar 2.6 Apron Conveyor .......................................................................................... 12
Gambar 2.7 Motor Induksi .............................................................................................. 14
Gambar 2.8 Medan Magnet Mengelilingi Konduktor..................................................... 16
Gambar 2.9 Rangkaian Ekivalen Motor Listrik .............................................................. 17
Gambar 2.10 Prinsip Kerja Motor Induksi ...................................................................... 22
Gambar 2.11 Belitan Stator Motor Induksi ..................................................................... 23
Gambar 2.12 Gelombang Sinusoida ............................................................................... 24
Gambar 2.13 Segitiga Daya ............................................................................................ 28
Gambar 2.14 Conveyorbelt ............................................................................................. 30
Gambar 2.15 Perhitungan Luas Permukaan Conveyorbelt ............................................. 31
Gambar 3.1 Flow Chart ................................................................................................... 34
Gambar 4.1 Daya Angkut Conveyorbelt ......................................................................... 46
DAFTAR PUSTAKA
1. Antonov, Y. O. (2016). Studi Pengaruh Torsi Beban Terhadap Kinerja motor 5(2252), 9–
15.
2. Suyamto. (2009). Analisis daya dan torsi pada motor induksi, (November), 206.
3. Kanaalaq, Regerishire. 2013. Analisa Daya Motor Induksi Tiga Phasa Penggerak Belt
Conveyor BC-11
4. Isdiyarto. (2010). Dampak Perubahan Putaran Terhadap Unjuk Kerja Motor Induksi 3
Phasa Jenis Rotor Sangkar, 1(2), 58.
5. Istanto w. Djatmiko dan Kustono. (2009). Performansi Parameter Motor Induksi Tiga
Fasa dengan Sumber Tegangan dan Frekuensi Variabel
6. Afiesg sp.(2013). Perhitungan Konversi Satuan Volume, Dosis, IU, dan Berat
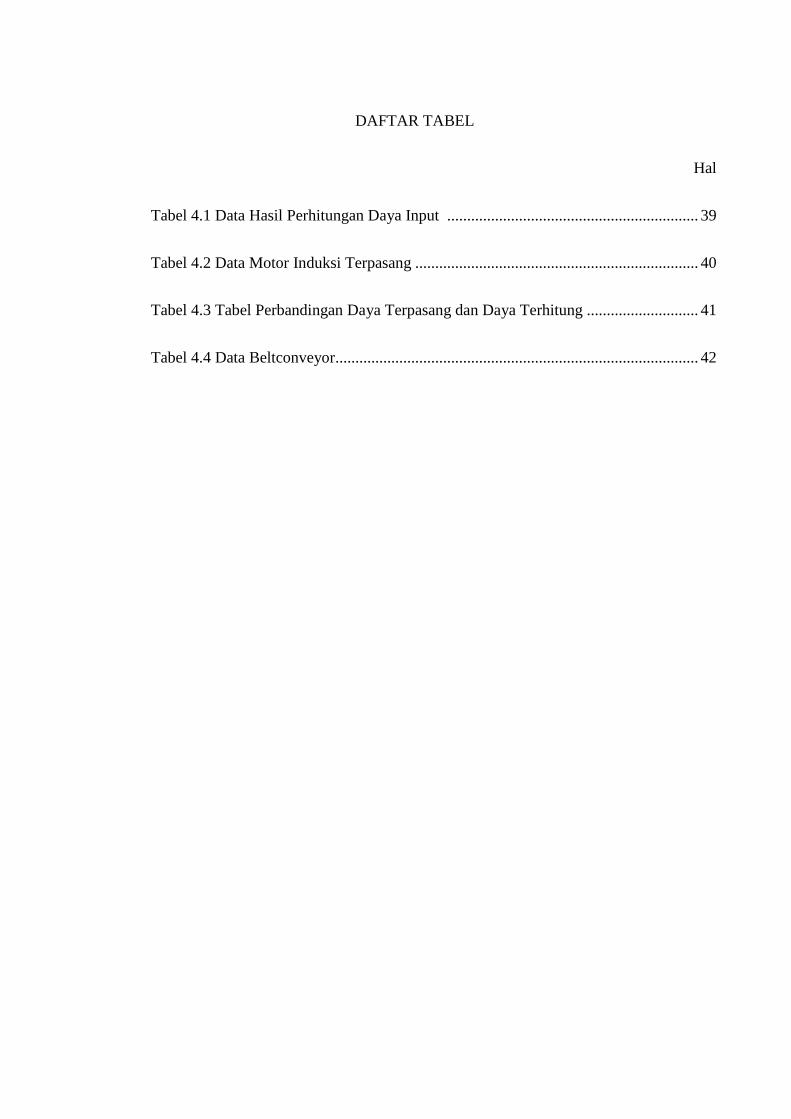
DAFTAR TABEL
Hal
Tabel 4.1 Data Hasil Perhitungan Daya Input ............................................................... 39
Tabel 4.2 Data Motor Induksi Terpasang ....................................................................... 40
Tabel 4.3 Tabel Perbandingan Daya Terpasang dan Daya Terhitung ............................ 41
Tabel 4.4 Data Beltconveyor........................................................................................... 42
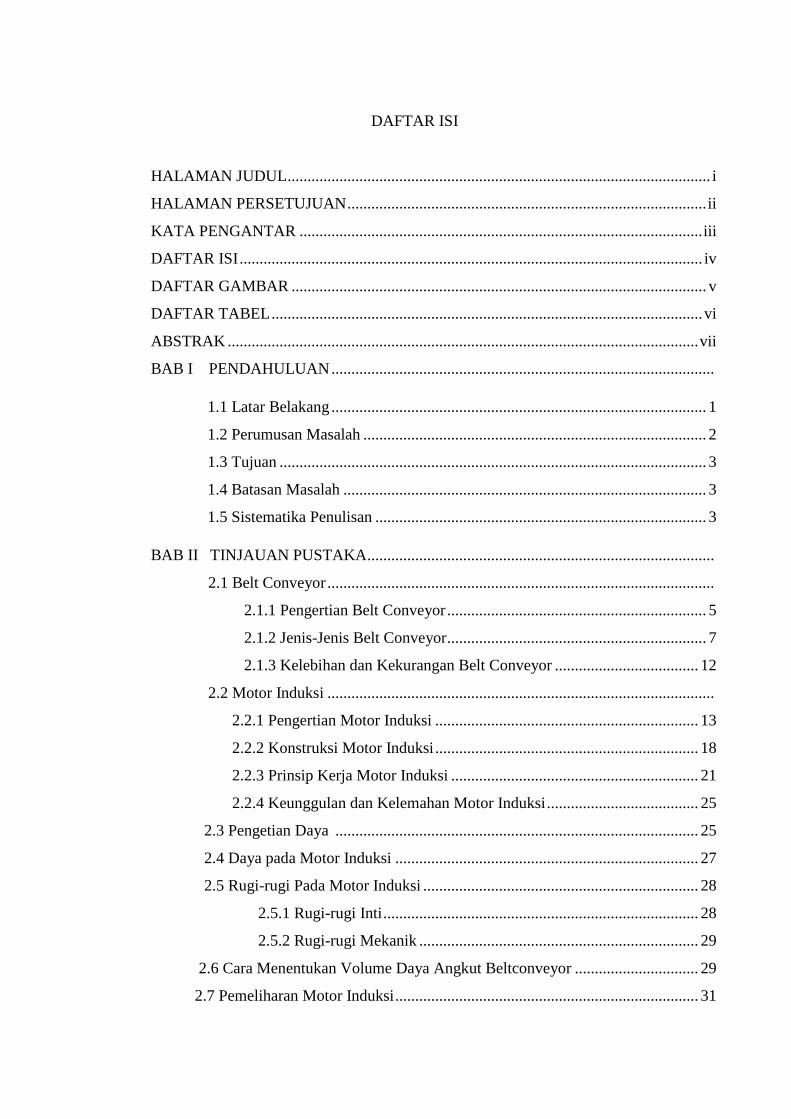
DAFTAR ISI
HALAMAN JUDUL .......................................................................................................... i
HALAMAN PERSETUJUAN .......................................................................................... ii
KATA PENGANTAR ..................................................................................................... iii
DAFTAR ISI .................................................................................................................... iv
DAFTAR GAMBAR ........................................................................................................ v
DAFTAR TABEL ............................................................................................................ vi
ABSTRAK ...................................................................................................................... vii
BAB I PENDAHULUAN ................................................................................................
1.1 Latar Belakang .............................................................................................. 1
1.2 Perumusan Masalah ...................................................................................... 2
1.3 Tujuan ........................................................................................................... 3
1.4 Batasan Masalah ........................................................................................... 3
1.5 Sistematika Penulisan ................................................................................... 3
BAB II TINJAUAN PUSTAKA .......................................................................................
2.1 Belt Conveyor .................................................................................................
2.1.1 Pengertian Belt Conveyor ................................................................. 5
2.1.2 Jenis-Jenis Belt Conveyor ................................................................. 7
2.1.3 Kelebihan dan Kekurangan Belt Conveyor .................................... 12
2.2 Motor Induksi .................................................................................................
2.2.1 Pengertian Motor Induksi .................................................................. 13
2.2.2 Konstruksi Motor Induksi .................................................................. 18
2.2.3 Prinsip Kerja Motor Induksi .............................................................. 21
2.2.4 Keunggulan dan Kelemahan Motor Induksi ...................................... 25
2.3 Pengetian Daya ........................................................................................... 25
2.4 Daya pada Motor Induksi ............................................................................ 27
2.5 Rugi-rugi Pada Motor Induksi ..................................................................... 28
2.5.1 Rugi-rugi Inti ............................................................................... 28
2.5.2 Rugi-rugi Mekanik ...................................................................... 29
2.6 Cara Menentukan Volume Daya Angkut Beltconveyor ............................... 29
2.7 Pemeliharan Motor Induksi ............................................................................ 31
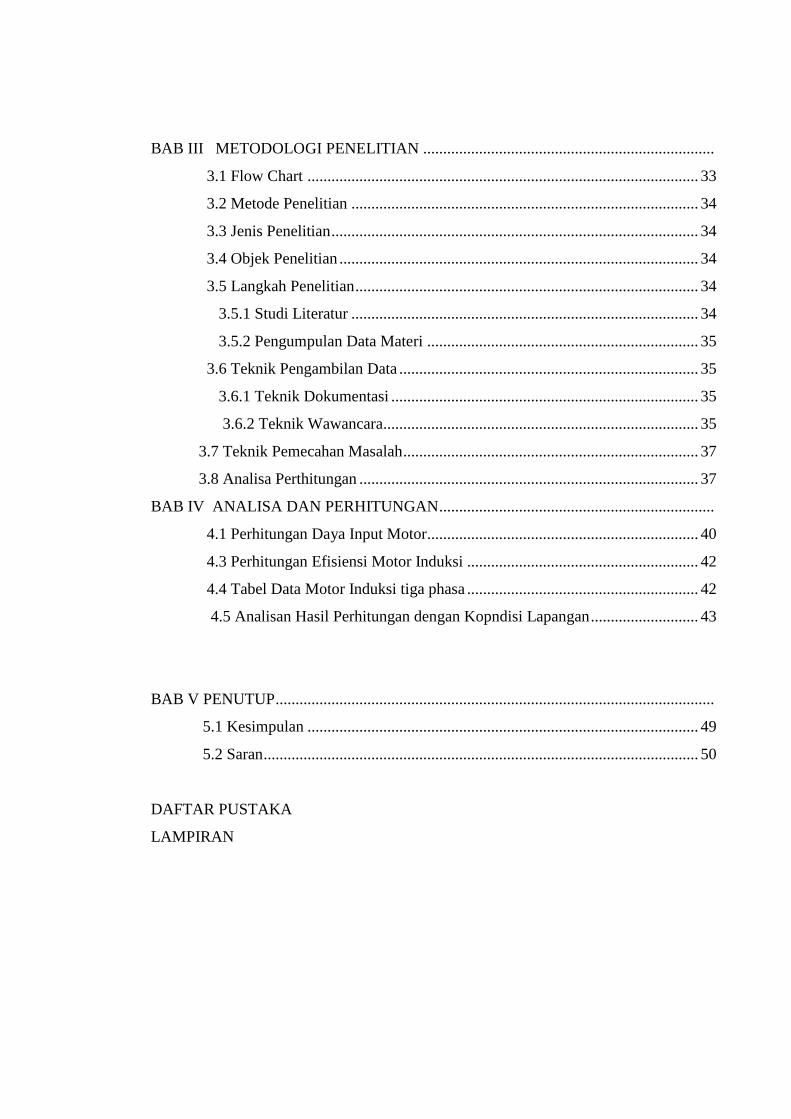
BAB III METODOLOGI PENELITIAN .........................................................................
3.1 Flow Chart .................................................................................................. 33
3.2 Metode Penelitian ....................................................................................... 34
3.3 Jenis Penelitian ............................................................................................ 34
3.4 Objek Penelitian .......................................................................................... 34
3.5 Langkah Penelitian ...................................................................................... 34
3.5.1 Studi Literatur ....................................................................................... 34
3.5.2 Pengumpulan Data Materi .................................................................... 35
3.6 Teknik Pengambilan Data ........................................................................... 35
3.6.1 Teknik Dokumentasi ............................................................................. 35
3.6.2 Teknik Wawancara............................................................................... 35
3.7 Teknik Pemecahan Masalah .......................................................................... 37
3.8 Analisa Perthitungan ..................................................................................... 37
BAB IV ANALISA DAN PERHITUNGAN .....................................................................
4.1 Perhitungan Daya Input Motor.................................................................... 40
4.3 Perhitungan Efisiensi Motor Induksi .......................................................... 42
4.4 Tabel Data Motor Induksi tiga phasa .......................................................... 42
4.5 Analisan Hasil Perhitungan dengan Kopndisi Lapangan ........................... 43
BAB V PENUTUP ..............................................................................................................
5.1 Kesimpulan .................................................................................................. 49
5.2 Saran ............................................................................................................. 50
DAFTAR PUSTAKA
LAMPIRAN