6.bab ii new
TRANSCRIPT
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 1/28
BAB II
TEORI PENUNJANG
Pada bab ini akan dijelaskan mengenai teori-teori yang digunakan
dalam penyelesaian proyek akhir ini, dintaranya sekilas tentang tanaman
tomat, pembuatan miniatur greenhouse, karakteristik sensor suhu,
kelembaban, cahaya yang digunakan, serta perangkat keras lain yang
digunakan.
2.1. DASAR TEORI TOMAT
2.1.1. Karakteristik Tomat
Klasifikasi botani tanaman bayam adalah sebagai berikut :Kingdom : Plantae (Tumbuh-tumbuhan)
Divisi : Spermatophyta (tumbuhan berbiji)
Subdivisi : Angiospermae (berbiji tertutup)
Kelas : Dicotylodenae (biji berkeping satu)
Ordo : Tubiflorae
Famili : Solanaceae
Genus : Lycopersicum
Spesies : Lycopersicum esculentum Mill
2.1.2 Syarat Pertumbuhan Tomat
Syarat tumbuh tanaman tomat adalah sebagai berikut:
a) Tumbuh pada dataran rendah maupun dataran tinggi
b) Suhu : 25-30 ° C
c) Kelembaban : 80%
2.2. LDR (Light Dependent Resistor)
LDR atau light Dependent Resistor adalah salah satu jenis
resistor yang nilai hambatannya dipengaruhi oleh cahaya yangditerima olehnya. LDR dibuat dari Cadmium Sulfida yang peka
terhadap cahaya. Seperti yang telah diketahui bahwa cahaya
memiliki dua sifat yang berbeda yaitu sebagai gelombang
elektromagnetik dan foton/partikel energi (dualisme cahaya).
Saat cahaya menerangi LDR, foton akan menabrak ikatan
Cadmium Sulfida dan melepaskan elektron. Semakin besar
intensitas cahaya yang datang, semakin banyak elektron yang
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 2/28
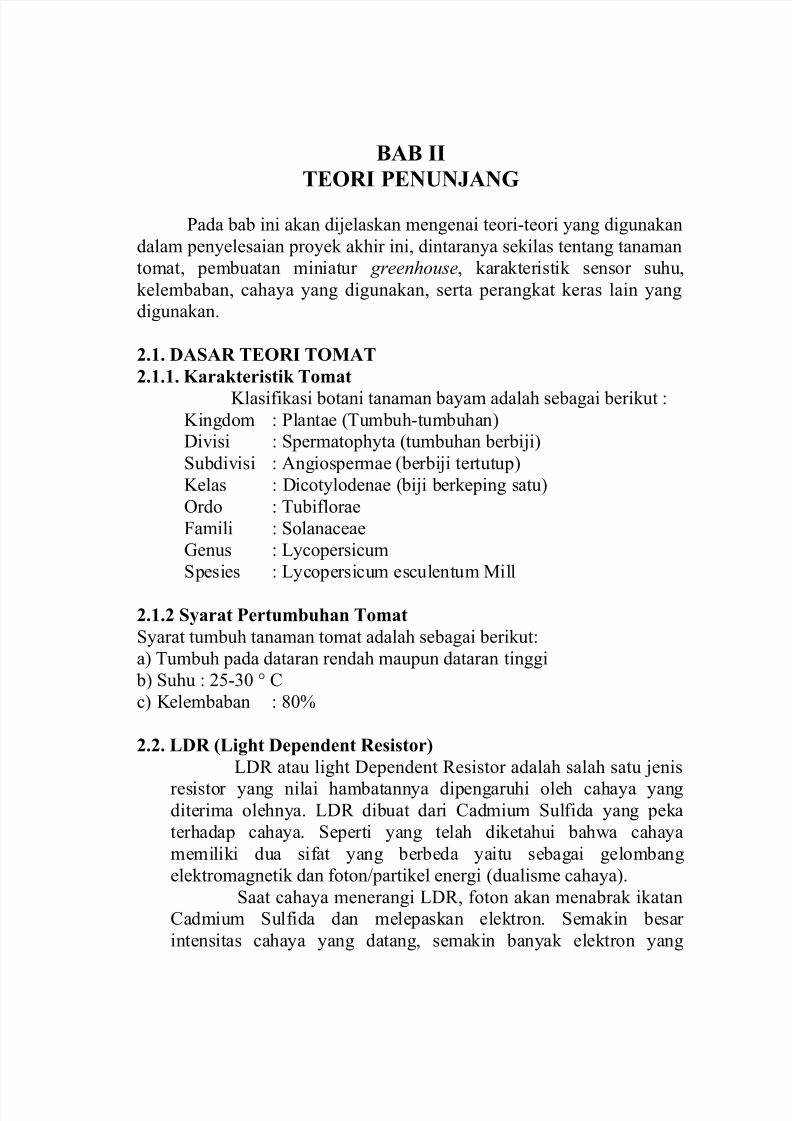
terlepas dari ikatan. Sehingga hambatan LDR akan turun saat
cahaya meneranginya.
Gambar 2.1 Karakteristik LDR
Gambar 2.2 Simbol LDR
Gambar 2.3 Fisik LDR
2.3. Sensor Temperatur dan Kelembaban
H500M sebagai alat deteksi temperature dan kelembaban
yang memiliki karakteristik sebagai berikut :
1. Range kelembaban 0% - 100%RH
2. Output kelembaban berupa tegangan dengan range 0.38-3.68V
(linier 0%RH – 100%RH)
3. Akurasi ±≤ 4%RH (@250C, 30%RH – 80%RH)
4. Konsumsi Daya < 1.5mA
5. Input tegangan 5V dc ±2%
6. Range temperatur 0 - 50
0
C
6
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 3/28
Gambar 2.4 Sensor H500M
2.4. Programmable Logic Controller (PLC)
Sebuah PLC ( Programmable Logic Controller ) adalah sebuah
alat yang digunakan untuk menggantikan rangkaian sederetan relai
yang dijumpai pada sistem kontrol proses konvensional. PLC
bekerja dengan cara mengamati masukan (melalui sensor-sensor
terkait), kemudian melakukan proses dan melakukan tindakan
sesuai yang dibutuhkan, yang berupa menghidupkan atau
mematikan keluarannya.
Semakin kompleks proses yang harus ditangani, semakin
penting penggunaan PLC untuk mempermudah proses-proses
tersebut (dan sekaligus menggantikan beberapa alat yang
diperlukan). Selain itu sistem kontrol proses konvensional
memiliki beberapa kelemahan, antara lain :
1) Perlu kerja keras saat dilakukan pengkabelan.
2) Kesulitan saat dilakukan penggantian dan atau perubahan.
3) Kesulitan saat dilakukan pelacakan kesalahan.
4) Saat terjadi masalah, waktu tunggu tidak menentu dan
biasanya lama.Sedangkan penggunaan kontroler PLC memiliki beberapa
kelebihan dibandingkan dengan sistem kontrol konvesional, antara
lain:1) Dibandingkan dengan sistem kontrol proses konvensional,
jumlah kabel yang dibutuhkan bisa berkurang hingga 80 %.
2) PLC mengkonsumsi daya lebih rendah dibandingkan dengan
sistem kontrol proses konvensional (berbasis relay).
3) Fungsi diagnostik pada sebuah kontroler PLC membolehkan
7
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 4/28
pendeteksian kesalahan yang mudah dan cepat.4) Perubahan pada urutan operasional atau proses atau aplikasi
dapat dilakukan dengan mudah, hanya dengan melakukan perubahan atau penggantian program, baik melalui terminal
konsol maupun komputer PC.5) Tidak membutuhkan spare part yang banyak.
6) Ketahanan PLC jauh lebih baik dibandingkan dengan relay
auto- mekanik.
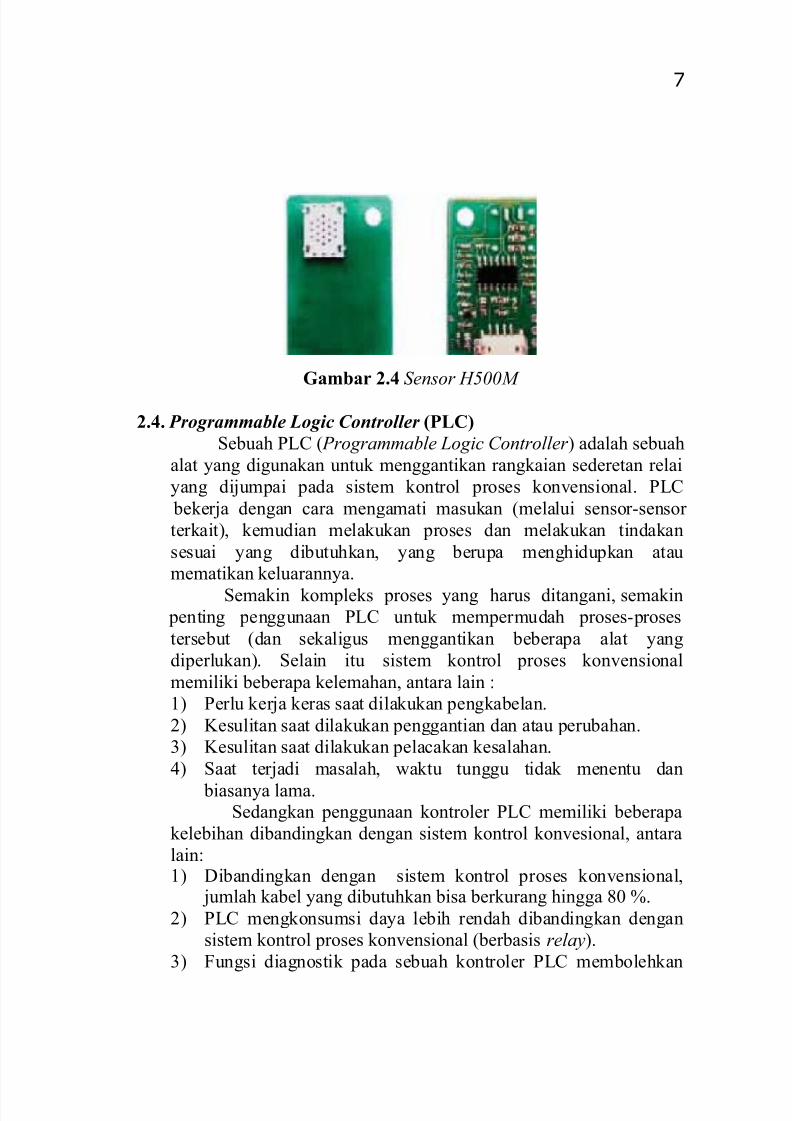
2.4.1. Komponen-Komponen PLC
PLC sesungguhnya merupakan sistem mikrokontroller
khusus untuk industri, artinya seperangkat perangkat lunak dan
keras yang diadaptasi untuk keperluan aplikasi dalam dunia
industri. Elemen – elemen dasar sebuah PLC terdiri dari CPU,Memory, dan Perangkat Input/Output. Gambar dibawah
menunjukkan elemen-elemen dari PLC
Gambar 2.5 Elemen – Elemen PLC
2.4.1.1. CPU (Central Processing Unit )
CPU merupakan otak dari sebuah kontroller PLC. CPU itu
sendiri biasanya merupakan sebuah mikrokontroller (versi mini
mikrokomputer lengkap). Pada awalnya merupakan
8
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 5/28
mikrokontroller 8-bit seperti 8051, namun saat ini bisa
merupakan mikrokontroller 16 atau 32-bit.
2.4.1.2. Memori
Memori digunakan oleh PLC untuk sistem kontrol proses.
Selain berfungsi untuk menyimpan sistem operasi, juga
digunakan untuk menyimpan program yang harus dijalankan,
dalam bentuk biner, hasil terjemahan diagram tangga yang telah
dibuat oleh pemrogram.
Sistem memori PLC dibagi berdasarkan tugas yang
diberikan:
1. Executive Memory, lokasi memori untuk menyimpan
kumpulan program secara permanen yang merupakan
instruksi software, yaitu relay instruction, block transfer, dan
math instruction. Lokasi memori ini tidak tersedia bagi
pemakai tetapi memori ini yang menjalankan sistem.
2. Application Memory, lokasi memori untuk
menyimpan kumpulan user program (program pemakai),
yaitu area yang menyimpan ladder diagram, timer, dan data –
data yang telah dimasukkan.
2.4.1.2.1. Tipe Memori PLC
1. ROM ( Read Only Memory)
ROM dirancang untuk menyimpan secara permanent
yang telah fixed. Isinya masih bisa diuji dan dibaca tetapi
tidak bisa dubah, ROM tidak memerlukan back up power
untuk menjaga memorinya. Executive program biasanya
disimpan di ROM.2. RAM ( Random Access Memory)
RAM dikenal sebagai read write memori dan
dirancang supaya informasi dapat ditulis dan dibaca dari
lokasi manapun. Ada 2 jenis RAM, Volatile dan Non
Volatile. Volatile memerlukan battery back up kalau power
hilang sedangkan non volatile RAM akan menjaga
programnya meskipun power hilang.
3. PROM ( Programmable Read Only Memory)
9
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 6/28
PERIKSA STATUS
MASUKAN
EKSEKUSI
PROGRAM
UPDATE STATUS
KELUARAN
Memori ini biasanya digunakan untuk program yang
diyakini benar untuk system control dengan PLC. Jika
dibutuhkan perubahan algoritma pada sistem kontrol
tersebut, maka PROM harus diganti (di upload) dengan
program baru. PROM bisa digunakan sebagai back up
permanen user program.
4. EPROM ( Erasable Programmable Read Only
Memory)
Memori ini mirip PROM, tetapi masih dapat dihapus
dengan membuka jendela dibagian atas IC dengan disinari
UV selama beberapa menit. EPROM bisa dipertimbangkan
sebagai alat penyimpanan semi permanen sehingga akan
menyimpan sebuah program secara permanen sampaidirasakan perlu adanya perubahan.
5. EEPROM ( Electrically Erasable Programmable Read
Only Memory)
Memori ini mirip EPROM, tetapi cara
penghapusannya lebih fleksible. Cara penghapusan
program dengan memberikan tegangan pada kedua kaki
(pin) memori untuk proses burning. Hal ini berarti bahwa
tipe memori ini bisa dipakai berulang.
2.4.1.3. Pemrograman PLC
Kontroller PLC dapat diprogram melalui komputer, tetapi
juga bisa diprogram melalui pemrograman manual, yang biasa
disebut dengan konsol (console). Untuk keperluan ini
dibutuhkan perangkat lunak, yang biasanya juga bergantung
pada produk PLC-nya.
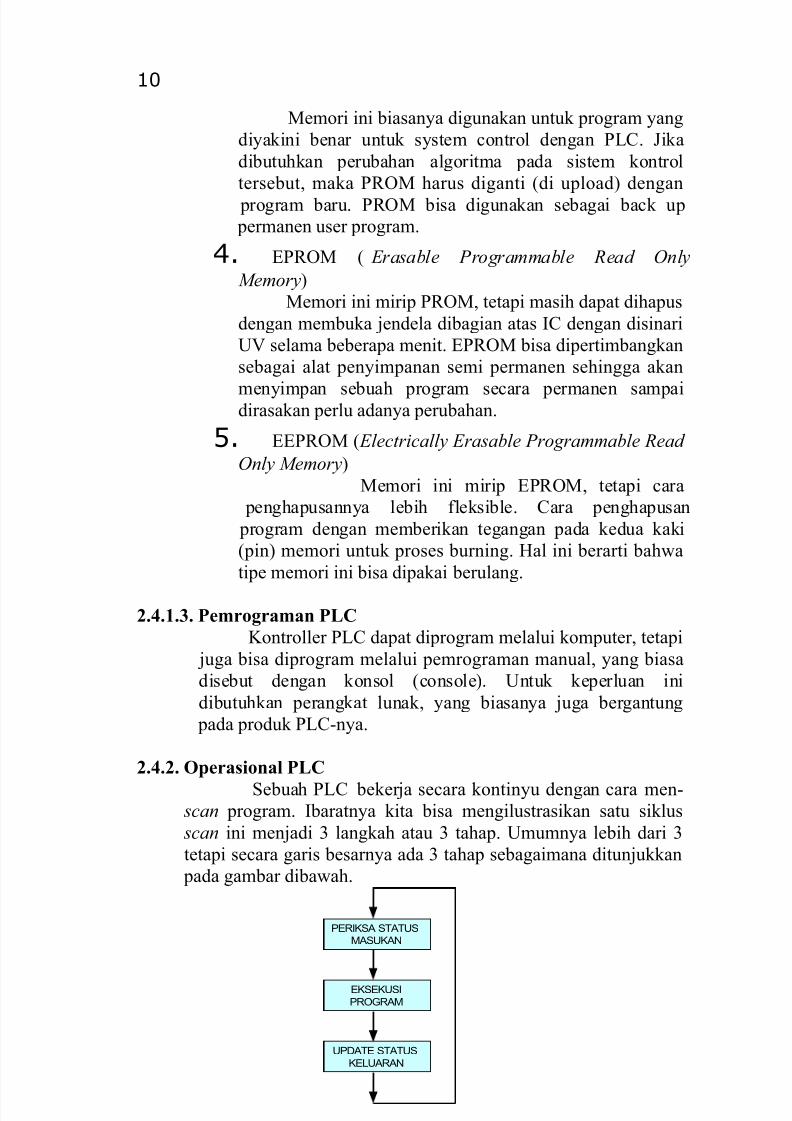
2.4.2. Operasional PLC
Sebuah PLC bekerja secara kontinyu dengan cara men- scan program. Ibaratnya kita bisa mengilustrasikan satu siklus
scan ini menjadi 3 langkah atau 3 tahap. Umumnya lebih dari 3
tetapi secara garis besarnya ada 3 tahap sebagaimana ditunjukkan
pada gambar dibawah.
10
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 7/28
Gambar 2.6 Proses Scanning Program PLC
Keterangan :
1. Periksa status masukan, pertama PLC akan melihat masing-
masing status keluaran apakah kondisinya sedang ON atau
OFF . Dengan kata lain, apakah sensor yang terhubungkandengan masukan pertama ON ? Bagaimana dengan yang
terhubungkan pada masukan kedua ? Demikian seterusnya,
hasilnya disimpan ke dalam memori yang terkait dan akan
digunakan pada langkah berikutnya.2. Eksekusi Program, berikutnya PLC akan mengerjakan atau
mengeksekusi program Anda (diagram tangga) per instruksi.Mungkin program Anda mengatakan bahwa masukan pertamastatusnya ON maka keluaran pertama akan di-ON -kan.
Karena PLC sudah tahu masukan yang mana saja yang ON dan OFF , dari langkah pertama dapat ditentukan apakahmemang keluaran pertama harus di-ON -kan atau tidak (berdasarkan status masukan pertama). Kemudian akanmenyimpan hasil eksekusi untuk digunakan kemudian.
3. Perbaharui status keluaran, akhirnya PLC akanmemperbaharui atau mengupdate status keluaran. Pembaharuankeluaran ini bergantung pada masukan mana yang ON selamalangkah 1 dan hasil dari eksekusi program di langkah 2. Jikamasukan pertama statusnya ON , maka dari langkah 2,eksekusi program akan menghasilkan keluaran pertama,sehingga pada langkah 3 ini keluaran pertama akandiperbaharui menjadi ON .
Setelah langkah 3, PLC akan menghalangi lagi scanning
program-nya dari langkah 1, demikian seterusnya. Waktu
scan didefinisikan sebagai waktu yang dibutuhkan untuk
mengerjakan tiga langkah tersebut. Masing- masing langkah bisa
memiliki waktu tanggap (response time) yang berbeda-beda,
11
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 8/28
waktu total tanggap atau total response time adalah jumlah
semua waktu tanggap masing-masing langkah.
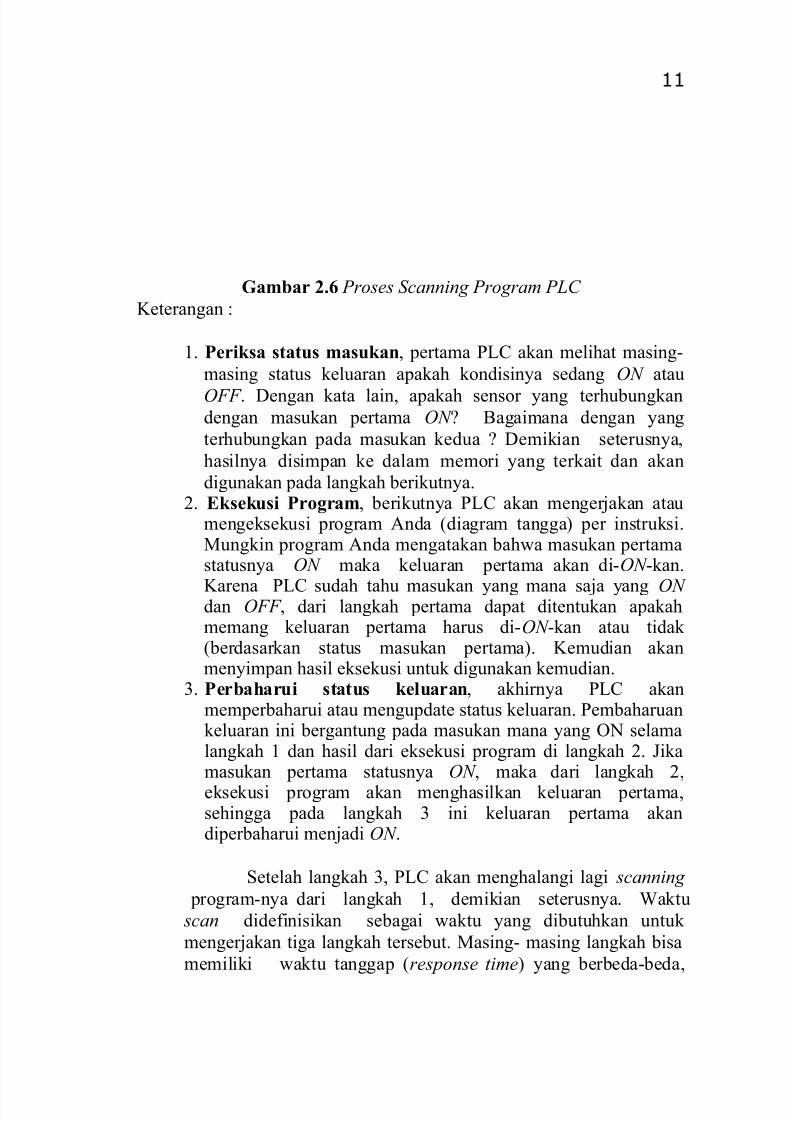
2.5. PLC Allen BradleyProgrammable Logic Controler (PLC) Allen Bradley
merupakan salah satu jenis PLC yang banyak digunakan untuk keperluan otomasi di industri. Ada 2 macam bentuk PLC AllenBradley yaitu bentuk compact dan bentuk modular . Untuk bentuk compact , PLCnya menggunakan system rak (CPU dan I/O jadi satukesatuan) dengan kapasitas memori yang terbatas.
Gambar 2.7 Bentuk PLC Compact
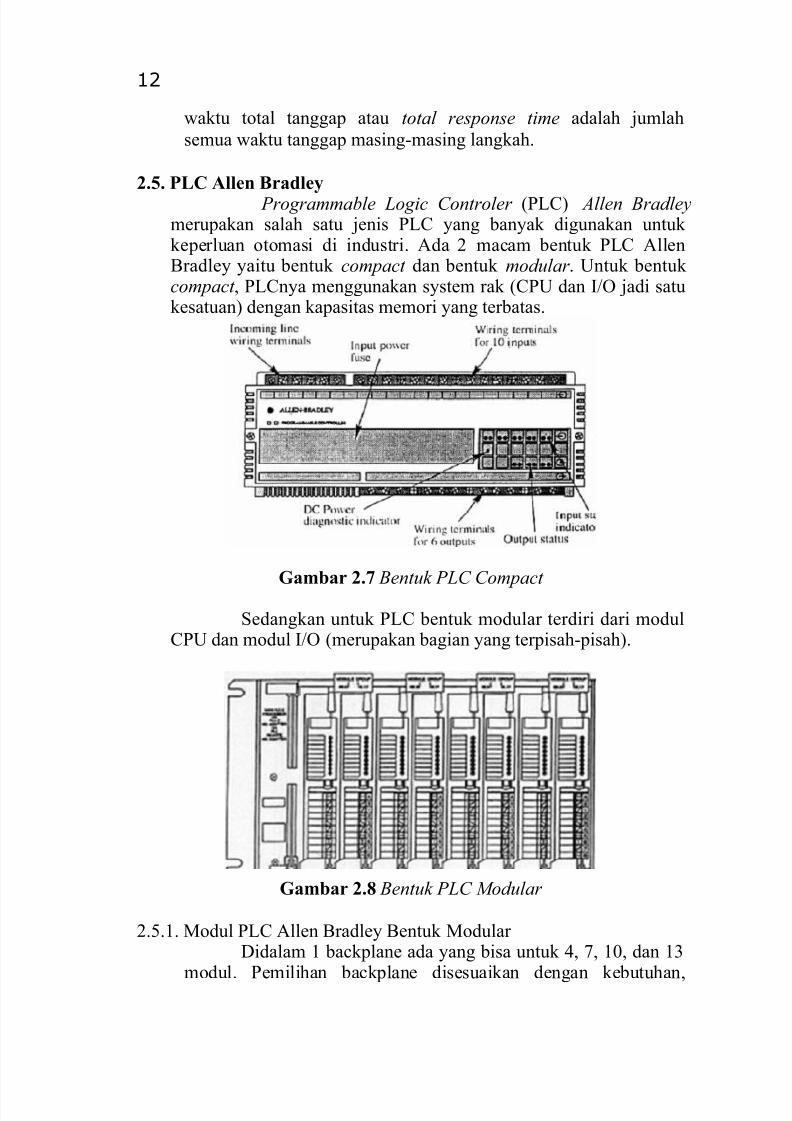
Sedangkan untuk PLC bentuk modular terdiri dari modulCPU dan modul I/O (merupakan bagian yang terpisah-pisah).
Gambar 2.8 Bentuk PLC Modular
2.5.1. Modul PLC Allen Bradley Bentuk Modular Didalam 1 backplane ada yang bisa untuk 4, 7, 10, dan 13
modul. Pemilihan backplane disesuaikan dengan kebutuhan,
12
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 9/28
semakin komplek system yang dibuat maka semakin banyak backplane yang digunakan. Apabila modul yang dibutuhkan lebihdari 13, maka harus menggunakan tambahan backplane karenatiap backplane maksimal untuk 13 modul saja.
2.5.1.1. Processor SLC 5/05Kecerdasan PLC ditentukan oleh tipe prosesor
(mikroprosesor) yang digunakan. Prosesor bertugas untuk memerintah dan mengontrol kegiatan-kegiatan di seluruhsistem. Prosesor tipe SLC 5/05(1747-L552C 5/05 CPU -32K Mem) mempunyai kapasitas maksimum 28,672instruction words.
2.5.1.2. Analog Input (1746-N14)Modul analog input ini terdiri dari 4 channel, input tiapchannel dapat berupa tegangan dc maupun arus dc. Untuk merubah input tegangan atau arus digunakan dip switch yangletaknya berada pada sisi modul. Pada modul tipe ini rangetegangannya +/- 10 V sedangkan range arus +/- 20 mA.
2.5.1.3. Analog Output (1746-NO41)Seperti modul analog input, modul ini juga terdiri dari 4
channel namun output tiap channelnya hanya berupa arus dc
dengan range 4mA – 21mA.
2.5.1.4. Digital Input (746-IB16)Modul digital input mempunyai 16 terminal. Inputnya
berupa tegangan dc dengan range 10-30 V.
2.5.1.5. Digital Output (1746-OW16)Modul digital output mempunyai 2 channel dengan 8
terminal output tiap channelnya. Outputnya dapat berupa
tegangan dc dengan range 5-125 V atau berupa tegangan acdengan range 5-265 V.
2.5.2. Instruksi-Instruksi PemrogramanInstruksi-instruksi pemrograman PLC tipe ini yakni :
Tabel 2.1 Tipe-tipe Relay Logic ( Bit )
T e Nama Mnemonic
Rela Normall Close XIC
13

5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 10/28
Lo ic Bit Normall O en XIO
Out ut Ener ize OTE
Out ut Latch OTL
Out ut Unlatch OTU
One Shot Risin OSR
Dimana :
1. Examine If Close (XIC)
Gambar 2.9 Instruksi XIC
Fun g si : Menentukan status bit B sebagaikondisi eksekusi untuk operasi selanjutnya di dalamsuatu baris instruksi.
Contoh:
Gambar 2.10 Contoh Penggunaan Instruksi XIC
2. Examine If Open (XIO)
Gambar 2.11 Instruksi XIO
14
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 11/28
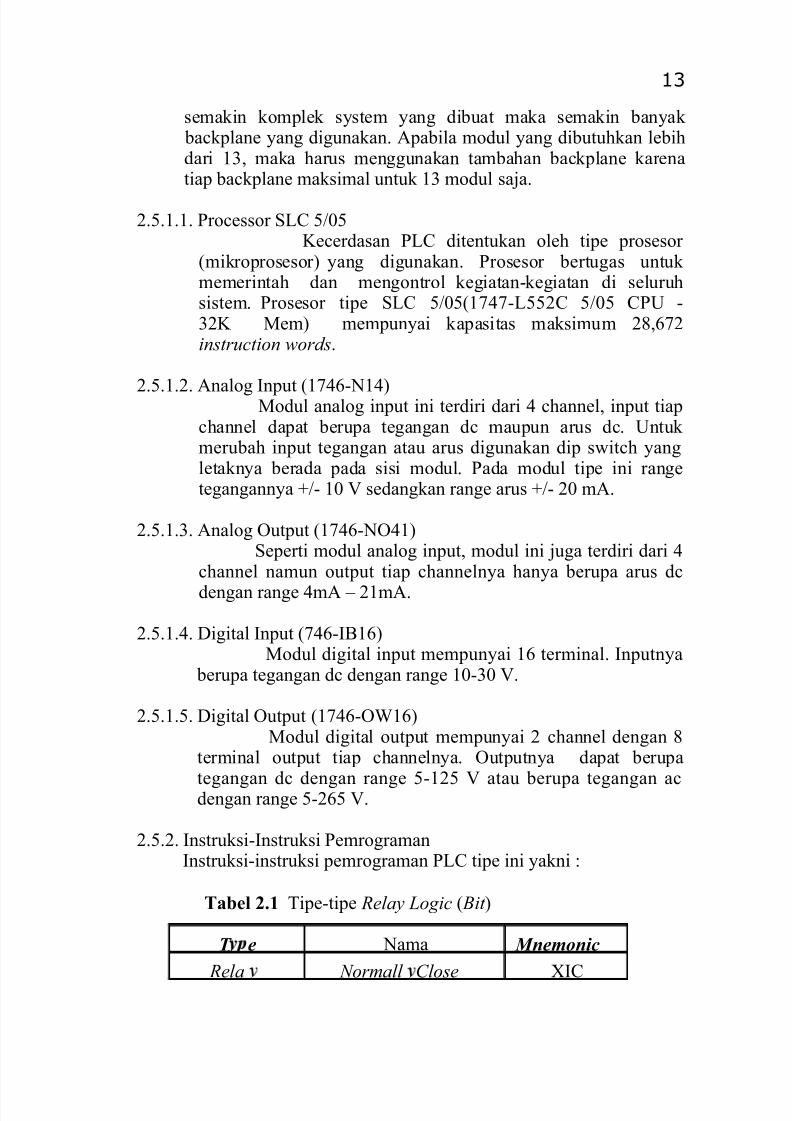
F u ngsi : Menentukan status dari invers bit B sebagai
kondisi eksekusi untuk operasi selanjutnya di dalam
suatu baris instruksi.
Contoh :
Gambar 2.12 Contoh Penggunaan Instruksi XIO
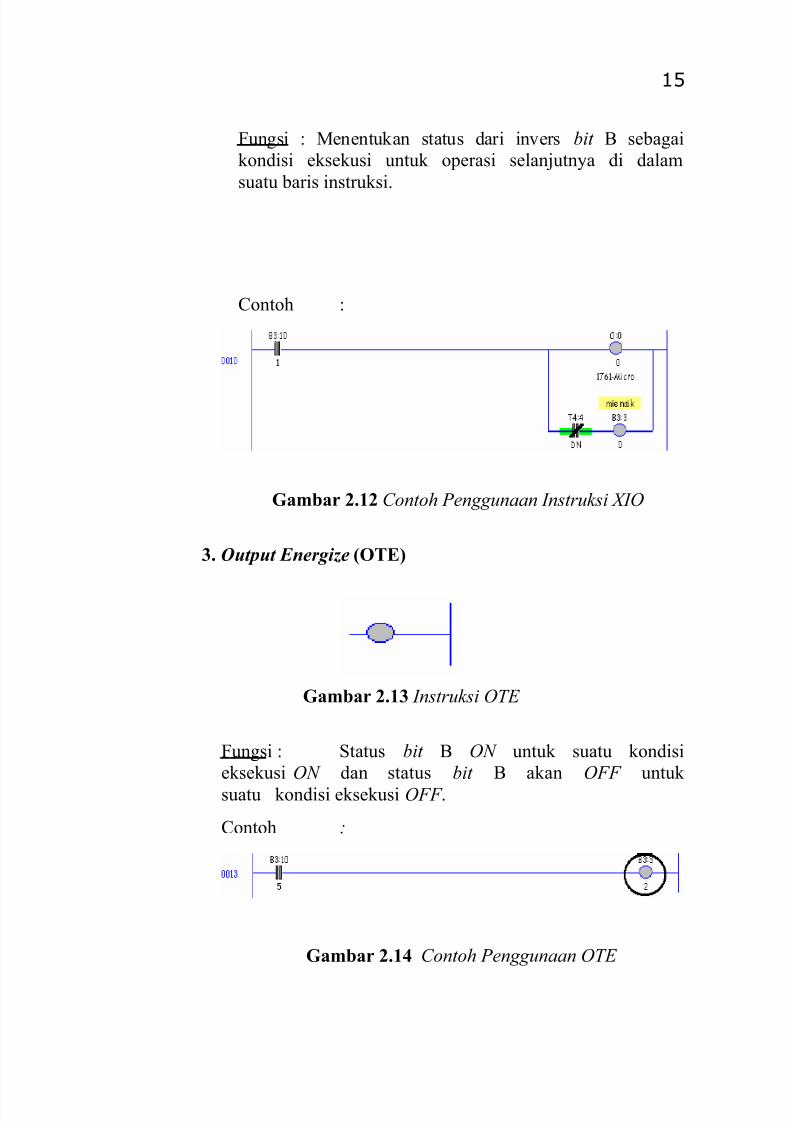
3. Output Energize (OTE)
Gambar 2.13 Instruksi OTE
F u ng s i : Status bit B ON untuk suatu kondisi
eksekusi ON dan status bit B akan OFF untuk
suatu kondisi eksekusi OFF .
Contoh :
Gambar 2.14 Contoh Penggunaan OTE
15
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 12/28
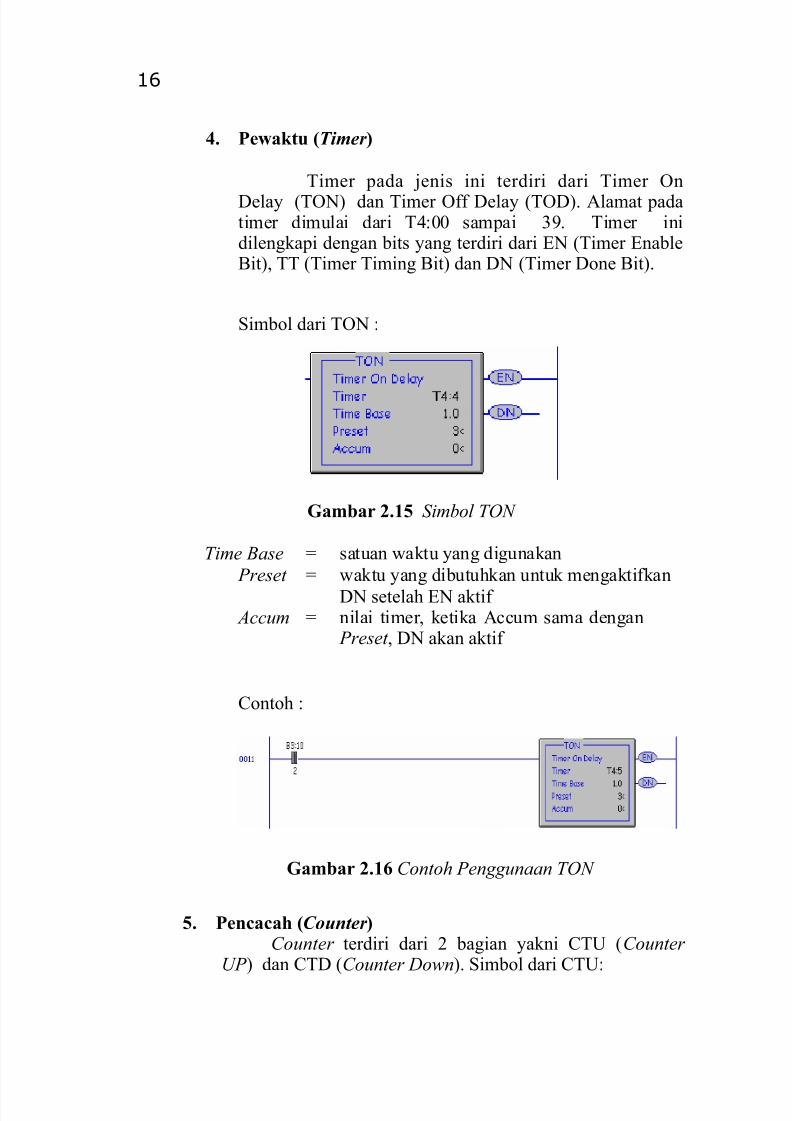
4. Pewaktu (Timer )
Timer pada jenis ini terdiri dari Timer On
Delay (TON) dan Timer Off Delay (TOD). Alamat padatimer dimulai dari T4:00 sampai 39. Timer inidilengkapi dengan bits yang terdiri dari EN (Timer EnableBit), TT (Timer Timing Bit) dan DN (Timer Done Bit).
Simbol dari TON :
Gambar 2.15 Simbol TON
Time Base = satuan waktu yang digunakan
Preset = waktu yang dibutuhkan untuk mengaktifkan
DN setelah EN aktif Accum = nilai timer, ketika Accum sama dengan
Preset , DN akan aktif
Contoh :
Gambar 2.16 Contoh Penggunaan TON
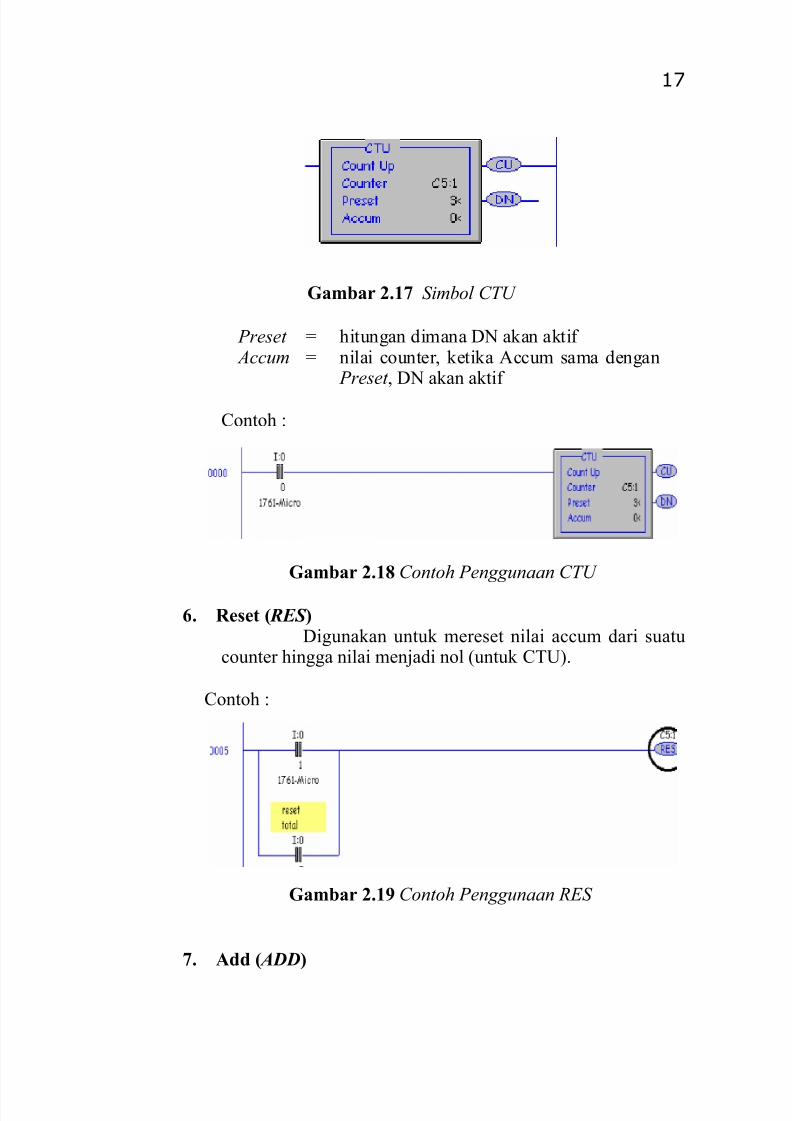
5. Pencacah (Counter )Counter terdiri dari 2 bagian yakni CTU (Counter
UP ) dan CTD (Counter Down). Simbol dari CTU:
16
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 13/28
Gambar 2.17 Simbol CTU
Preset = hitungan dimana DN akan aktif Accum = nilai counter, ketika Accum sama dengan
Preset , DN akan aktif
Contoh :
Gambar 2.18 Contoh Penggunaan CTU
6. Reset ( RES )Digunakan untuk mereset nilai accum dari suatu
counter hingga nilai menjadi nol (untuk CTU).
Contoh :
Gambar 2.19 Contoh Penggunaan RES
7. Add ( ADD)
17
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 14/28
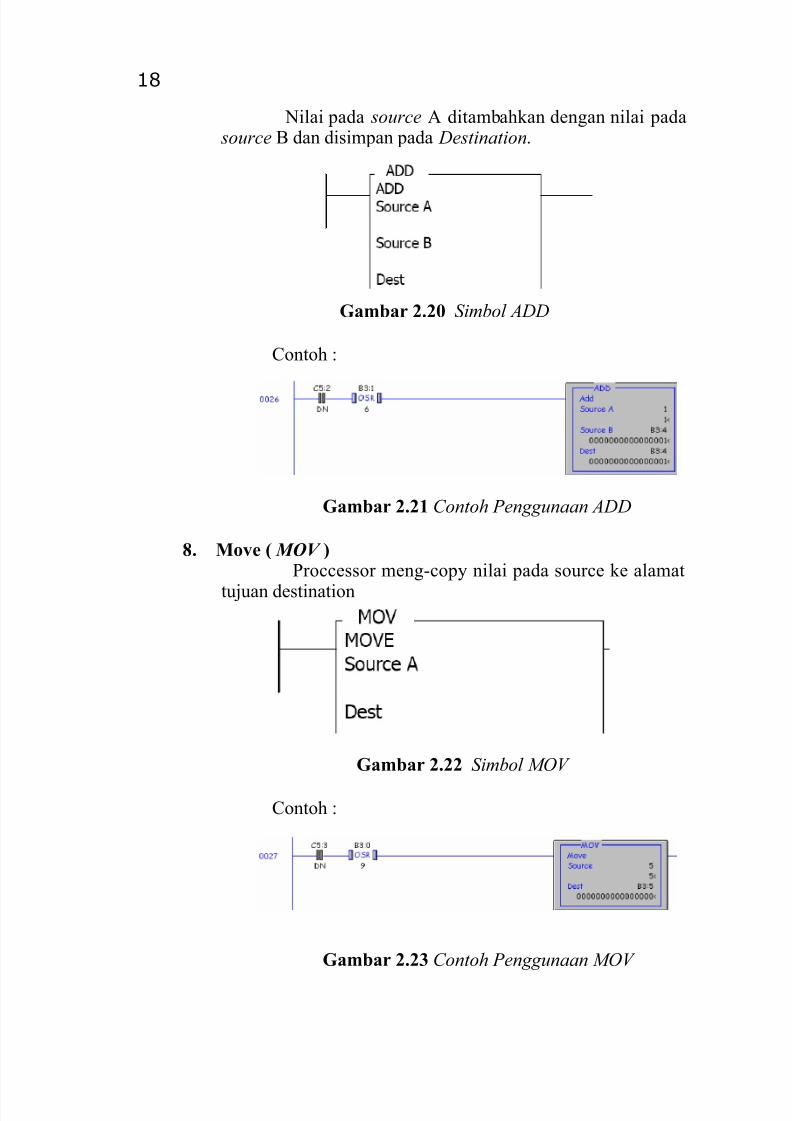
Nilai pada source A ditambahkan dengan nilai pada source B dan disimpan pada Destination.
Gambar 2.20 Simbol ADD
Contoh :
Gambar 2.21 Contoh Penggunaan ADD
8. Move ( MOV )Proccessor meng-copy nilai pada source ke alamat
tujuan destination
Gambar 2.22 Simbol MOV
Contoh :
Gambar 2.23 Contoh Penggunaan MOV
18
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 15/28
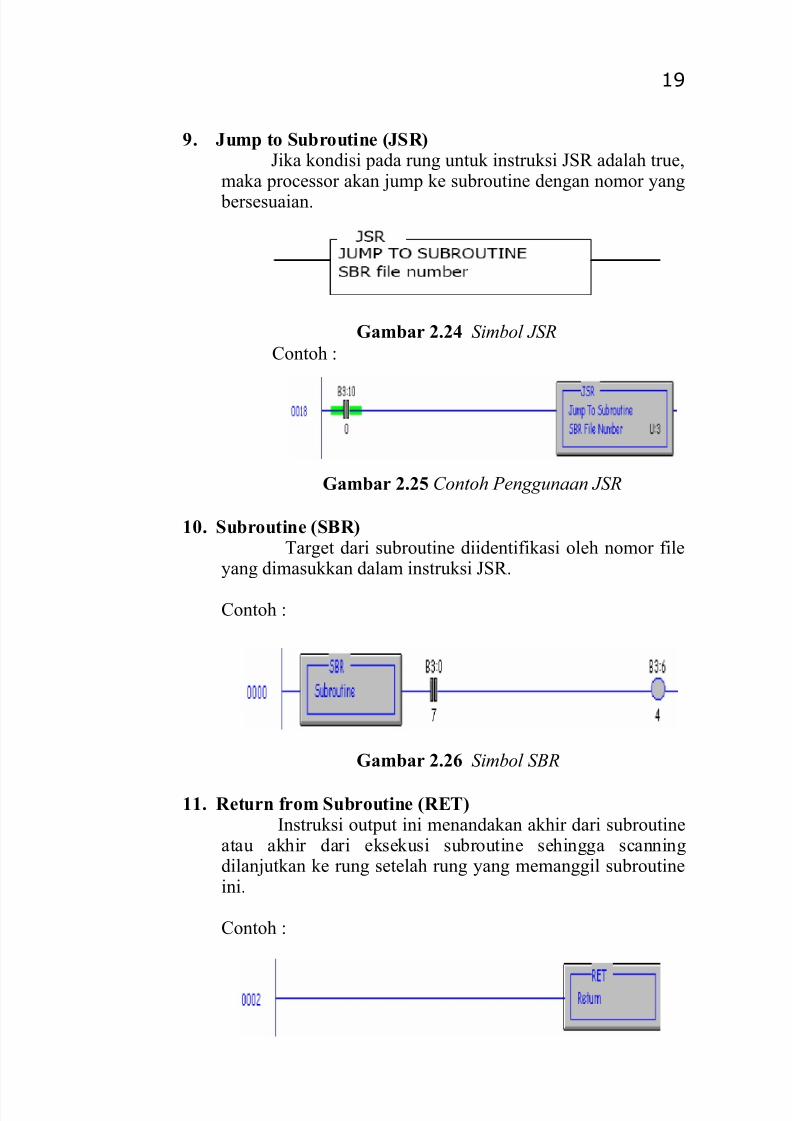
9. Jump to Subroutine (JSR)Jika kondisi pada rung untuk instruksi JSR adalah true,
maka processor akan jump ke subroutine dengan nomor yang
bersesuaian.
Gambar 2.24 Simbol JSR
Contoh :
Gambar 2.25 Contoh Penggunaan JSR
10. Subroutine (SBR)Target dari subroutine diidentifikasi oleh nomor file
yang dimasukkan dalam instruksi JSR.
Contoh :
Gambar 2.26 Simbol SBR
11. Return from Subroutine (RET)Instruksi output ini menandakan akhir dari subroutine
atau akhir dari eksekusi subroutine sehingga scanningdilanjutkan ke rung setelah rung yang memanggil subroutineini.
Contoh :
19
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 16/28
Gambar 2.27 Simbol RET
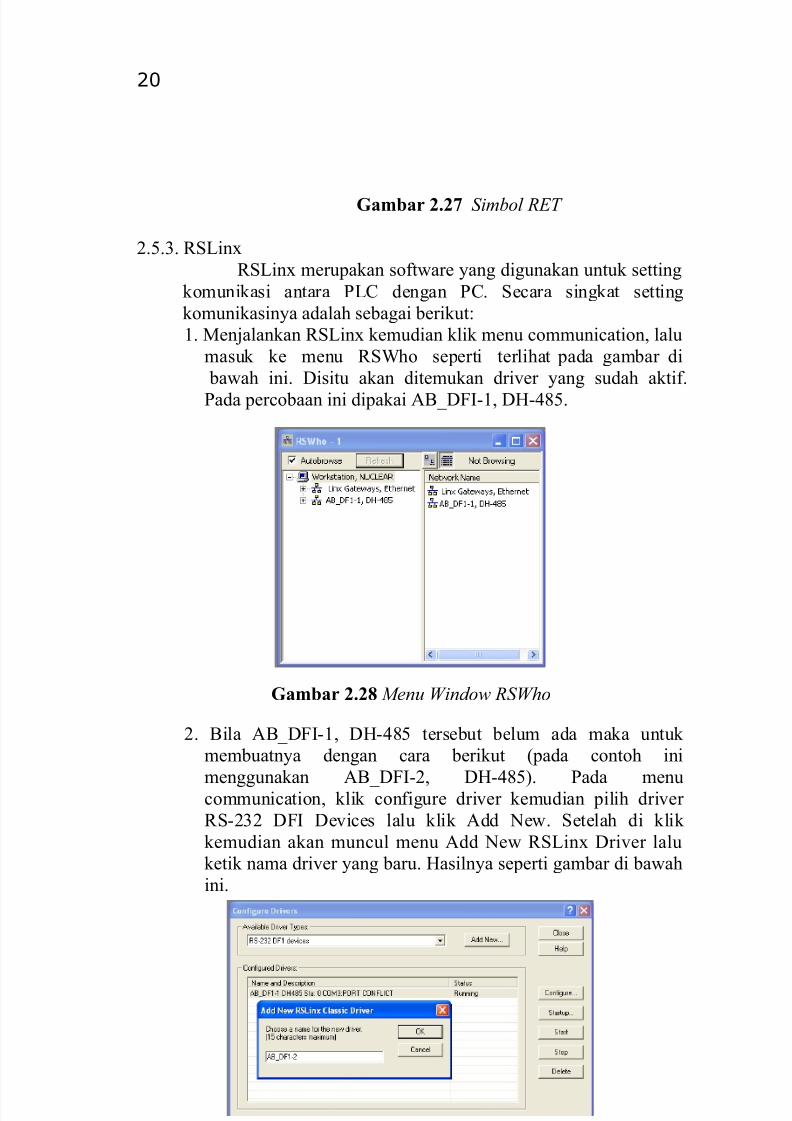
2.5.3. RSLinx
RSLinx merupakan software yang digunakan untuk setting
komunikasi antara PLC dengan PC. Secara singkat setting
komunikasinya adalah sebagai berikut:
1. Menjalankan RSLinx kemudian klik menu communication, lalu
masuk ke menu RSWho seperti terlihat pada gambar di
bawah ini. Disitu akan ditemukan driver yang sudah aktif.
Pada percobaan ini dipakai AB_DFI-1, DH-485.
Gambar 2.28 Menu Window RSWho
2. Bila AB_DFI-1, DH-485 tersebut belum ada maka untuk
membuatnya dengan cara berikut (pada contoh ini
menggunakan AB_DFI-2, DH-485). Pada menucommunication, klik configure driver kemudian pilih driver
RS-232 DFI Devices lalu klik Add New. Setelah di klik
kemudian akan muncul menu Add New RSLinx Driver lalu
ketik nama driver yang baru. Hasilnya seperti gambar di bawah
ini.
20
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 17/28
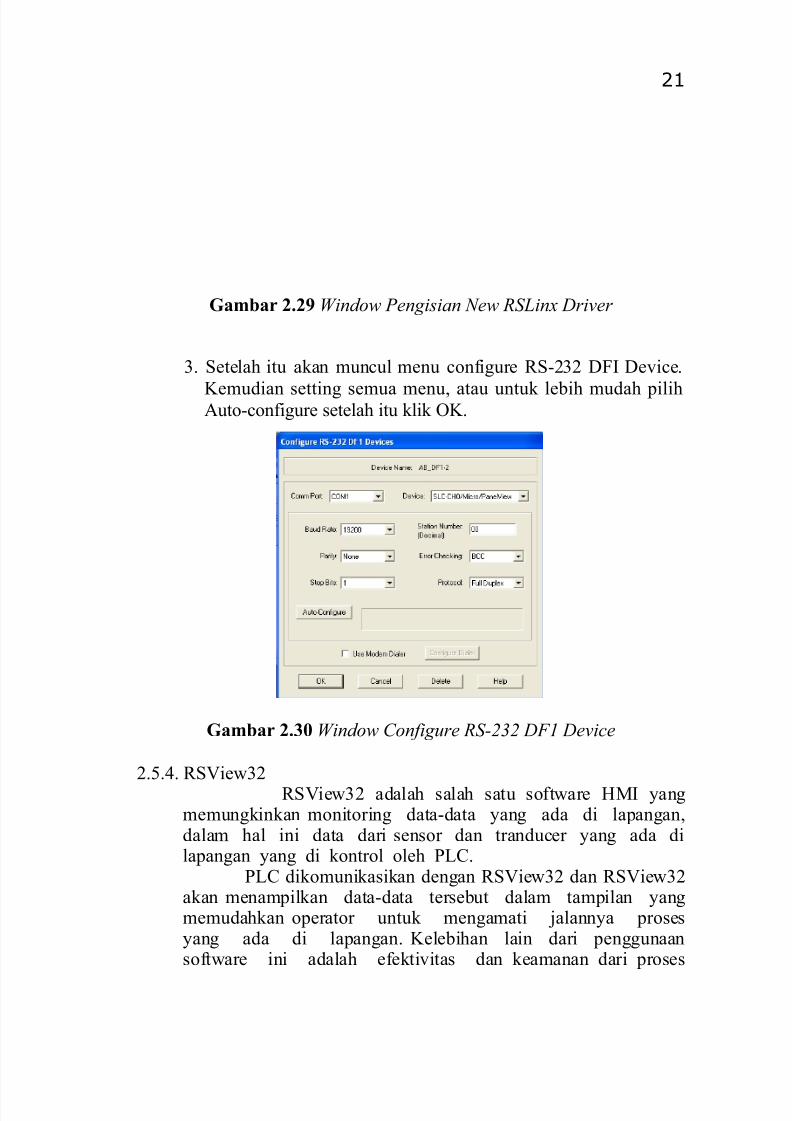
Gambar 2.29 Window Pengisian New RSLinx Driver
3. Setelah itu akan muncul menu configure RS-232 DFI Device.
Kemudian setting semua menu, atau untuk lebih mudah pilihAuto-configure setelah itu klik OK.
Gambar 2.30 Window Configure RS-232 DF1 Device
2.5.4. RSView32RSView32 adalah salah satu software HMI yang
memungkinkan monitoring data-data yang ada di lapangan,dalam hal ini data dari sensor dan tranducer yang ada dilapangan yang di kontrol oleh PLC.
PLC dikomunikasikan dengan RSView32 dan RSView32akan menampilkan data-data tersebut dalam tampilan yangmemudahkan operator untuk mengamati jalannya prosesyang ada di lapangan. Kelebihan lain dari penggunaansoftware ini adalah efektivitas dan keamanan dari proses
21
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 18/28
kontrol dan monitoring. Berikut adalah setting supaya RSView bisa dihubungkan dengan PLC :
1 1. Mengatur konfigurasi komunikasi antara PC ( Personal
Computer ) dengan PLC ( Programmable Logic Controller )menggunakan software RSLinx.
2 2. Menjalankan software RSLogix lalu membuka ladder yang
telah dibuat atau membuat ladder baru.
3 3. Men-download ladder yang aktif ke PLC.
4 4. Menjalankan software RSView lalu membuka project yang
telah dibuat atau membuat project baru.
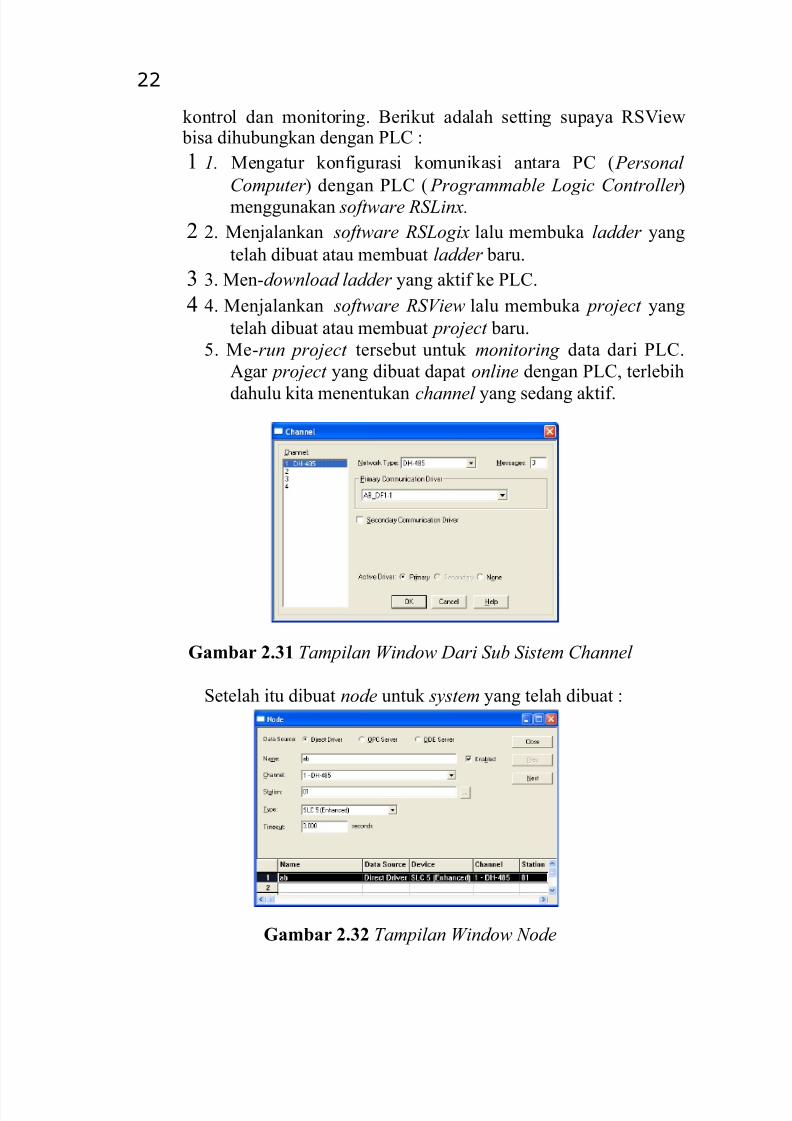
5. Me-run project tersebut untuk monitoring data dari PLC.
Agar project yang dibuat dapat online dengan PLC, terlebih
dahulu kita menentukan channel yang sedang aktif.
Gambar 2.31 Tampilan Window Dari Sub Sistem Channel
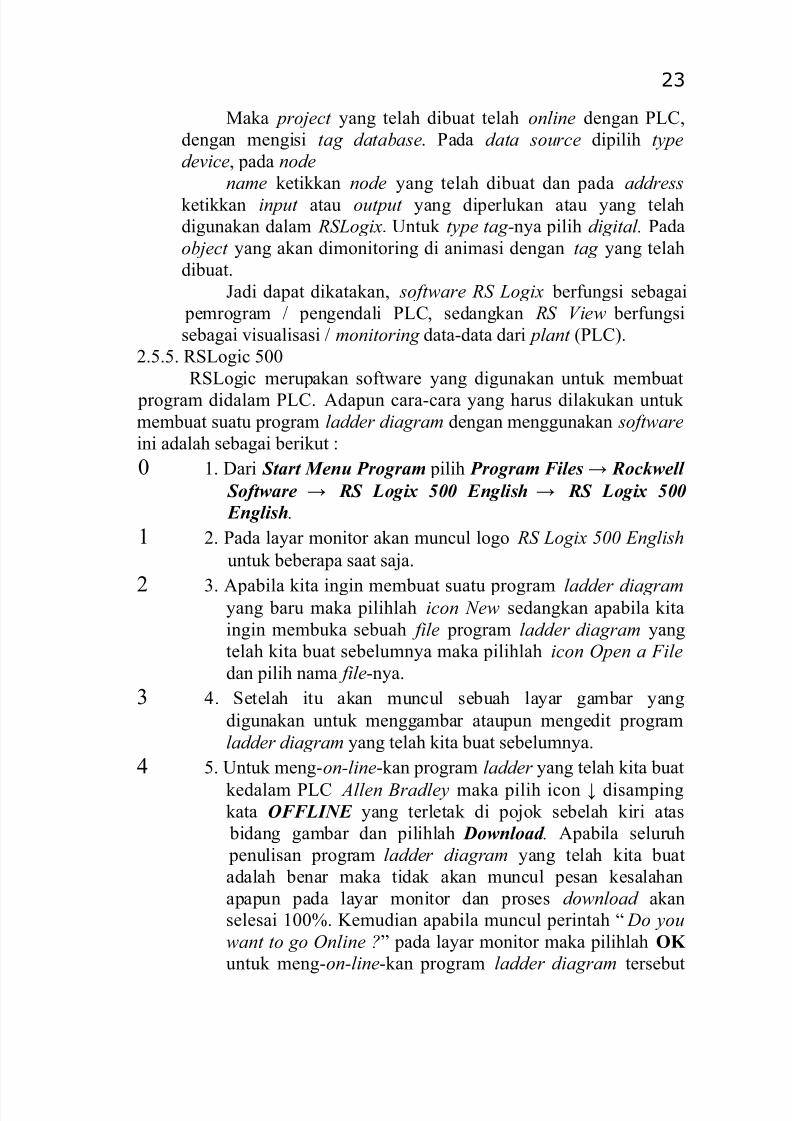
Setelah itu dibuat node untuk system yang telah dibuat :
Gambar 2.32 Tampilan Window Node
22
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 19/28
Maka project yang telah dibuat telah online dengan PLC,
dengan mengisi tag database. Pada data source dipilih type
device, pada node
name ketikkan node yang telah dibuat dan pada address
ketikkan input atau output yang diperlukan atau yang telah
digunakan dalam RSLogix. Untuk type tag-nya pilih digital. Pada
object yang akan dimonitoring di animasi dengan tag yang telah
dibuat.
Jadi dapat dikatakan, software RS Logix berfungsi sebagai
pemrogram / pengendali PLC, sedangkan RS View berfungsi
sebagai visualisasi / monitoring data-data dari plant (PLC).
2.5.5. RSLogic 500
RSLogic merupakan software yang digunakan untuk membuat
program didalam PLC. Adapun cara-cara yang harus dilakukan untuk
membuat suatu program ladder diagram dengan menggunakan software
ini adalah sebagai berikut :
0 1. Dari Start Menu Program pilih Program Files → Rockwell
Software → RS Logix 500 English → RS Logix 500
English.
1 2. Pada layar monitor akan muncul logo RS Logix 500 English
untuk beberapa saat saja.
2 3. Apabila kita ingin membuat suatu program ladder diagramyang baru maka pilihlah icon New sedangkan apabila kita
ingin membuka sebuah file program ladder diagram yang
telah kita buat sebelumnya maka pilihlah icon Open a File
dan pilih nama file-nya.
3 4. Setelah itu akan muncul sebuah layar gambar yang
digunakan untuk menggambar ataupun mengedit program
ladder diagram yang telah kita buat sebelumnya.
4 5. Untuk meng-on-line-kan program ladder yang telah kita buat
kedalam PLC Allen Bradley maka pilih icon ↓ disampingkata OFFLINE yang terletak di pojok sebelah kiri atas
bidang gambar dan pilihlah Download . Apabila seluruh
penulisan program ladder diagram yang telah kita buat
adalah benar maka tidak akan muncul pesan kesalahan
apapun pada layar monitor dan proses download akan
selesai 100%. Kemudian apabila muncul perintah “ Do you
want to go Online ?” pada layar monitor maka pilihlah OK
untuk meng-on-line-kan program ladder diagram tersebut
23

5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 20/28
kedalam PLC Allen Bradley dan apabila kita tidak ingin
meng-on-line-kan program tersebut maka klik Cancel .
2.6. Kontroller
Karakteristik pada semua plant harus diterima sesuai dengan
yang telah dibuat sehingga komponen penyusun dari suatu sistem
tdak dapat diubah. Perubahan perilaku sistem hanya bisa dilakukan
dengan menambah suatu bab sistem yaitu kontroler. Oleh karena itu
kontroler dalam sebuah sistem kontrol mempunyai pengaruh yang
besar terhadap perilaku sistem.
Tujuan pembuatan sistem kontrol adalah untuk mendapatkan
sinyal aktual sesuai dengan yang diinginkan sehingga sinyal
tersebut sama dengan sinyal yang disetting. Pada sistem kontrol
yang berumpan balik merupakan sistem kontrol yang cenderung
menjaga hubungan yang telah ditentukan antara keluaran dan
masukan acuan dengan membandingkan dan menggunakan selisih
sebagai alat pengontrolan. Kerja dari kontroler yang maksimum dan
baik harus mampu mengamati perbedaan antara nilai setting dengan
nilai keluaran secara cepat agar segera dapat menghasilkan sinyal
keluaran untuk mempengaruhi plant. Apabila reaksi sistem semakin
cepat mengikuti sinyal aktual dan semakin kecil kesalahan (error)
yang terjadi, maka semakin baik kinerja dari sistem kontrol.
Dalam persyaratan umum sistem kontrol terdapat persyaratan
utama yaitu setiap sistem kontrol harus stabil. Tetapi selain
kestabilan mutlak, suatu sistem kontrol harus mempunyai kestabilan
relatif yang kayak jadi kecepatan respon harus cukup cepat dan
menunjukkan peredaman yang layak. Suatu sistem kontrol juga
harus mampu memperkecil kesalahan sampai nol atau sampai pada
suatu harga yang dapat ditoleransi. Setiap sistem kontrol yang
berguna harus memenuhi persyaratan ini. Persyaratan kestabilan
relatif yang layak dan ketelitian keadaan yang tunak (steady state)
cenderung tidak dapat dipenuhi secara bersama-sama. Oleh karena
itu dalam mendesain sistem kontrol perlu dilakukan kompromi yang
efektif diantara dua persyaratan ini.
Dalam menganalisis dan mendesain sistem kontrol, kita
harus mempunyai suatu dasar perbandingan performansi berbagai
sistem kontrol. Dengan sinyal masukan uji dapat dilakukan analisis
matematik dan eksperimental sistem kntrol secara mudah karena
sinyal-sinyal ini merupakan fungsi waktu yang sederhana. Sinyal
masukan uji yang biasa digunakan adalah fingsi tangga, fungsi
24
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 21/28
”ramp”, fungsi percepatan, fungsi sinusoidal,dsb. Salah satu
eksperimen yang dilakukan yaitu jika masukan sistem kontrol
merupakan fungsi waktu yang berangsur-angsur berubah maka
fungsi waktu ”ramp” merupakan sinyal uji yang baik.
Respon waktu sistem kontrol terdiri dari dua bagian yaitu
respon transien dan keadaan tunak (steady state). Yang dimaksud
dengan respon transien adalah respon sistem yang berlangsung dari
keadaan awal sampai keadaan akhir. Untuk respon keadaan tunak
dimaksudkan sebagai perilaku keluaran sistem jika t mendekati tak
terhingga. Sistem kontrol berada dalam kesetimbangan jika tidak
ada suatu gangguan atau masukan, keluaran berada dalam keadaan
yang tetap. Sistem kontrol linier parameter konstan tidak stabil jika
keluaran berosilasi terus-menerus atau keluaran membesar tanpa
batas dari keadaan kesetimbangannya ketika dikenai suatu
gangguan. Respon transien sistem kontrol praktis sering
menunjukkan osilasi teredam sebelum mencapai keadaan tunak.
Dalam menentukan karakteristik respon transien sistem
kontrol terhadap masukan tangga satuan, secara umum dicari
parameter berikut :
1. Waktu tunda (delay time) td : Waktu yang diperlukan
respon untuk mencapai setengah harga akhir yang pertama kali.
2. Waktu naik (rise time) tr : Waktu yang diperlukan
respon untuk naik dai 10-90% dari harga akhir.
3. Waktu puncak (peak time) tp : Waktu yang
diperlukan respon untuk mencapai puncak lewatan yang
pertama kali.
4. Lewatan maksimum (maksimum overshoot) Mp :
Harga puncak maksimum dari kurva respon yang diukur dari
satu.
Waktu penetapan (settling time) ts : Waktu yang diperlukan
kurva respon untuk mencapai dan menetap dalam daerah sekitar
harga akhir dengan ukuran ditentukan dari presentasi mutlak harga
akhir (5% atau 2%).
2.6.1 KONTROLER PROPORTIONAL
Kontroler proporsional memiliki keluaran yang
sebanding/proposional dengan besar dari sinyal kesalahan (selisih
antara besaran yang diinginkan dengan harga aktual). Secara lebih
sederhana dapat dikatakan, bahwa keluaran kontroler proporsional
merupakan perkalian antara konstanta proporsional dengan error.
25
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 22/28
Perubahan pada sinyal masukan akan segera menyebabkan sistem
secara langsung mengubah keluaran sebesar konstanta pengali.
Berikut ini merupakan ketentuan-ketentuan kontroler proporsional
yang perlu diperhatikan saat diterapkan pada suatu sistem, antara
lain:
1. Jika nilai Kp kecil, kontroler
proporsional hanya mampu melakukan koreksi kesalahan yang
kecil, sehingga akan menghasilkan respon sistem yang lambat.
2. Jika nilai Kp dinaikkan, respon sistem
menunjukkan semakin cepat mencapai keadaan mantap.
Namun jika nilai Kp diperbesar sehingga mencapai harga yang
berlebihan, akan mengakibatkan sistem bekerja tidak stabil,
atau respon sistem akan berosilasi.
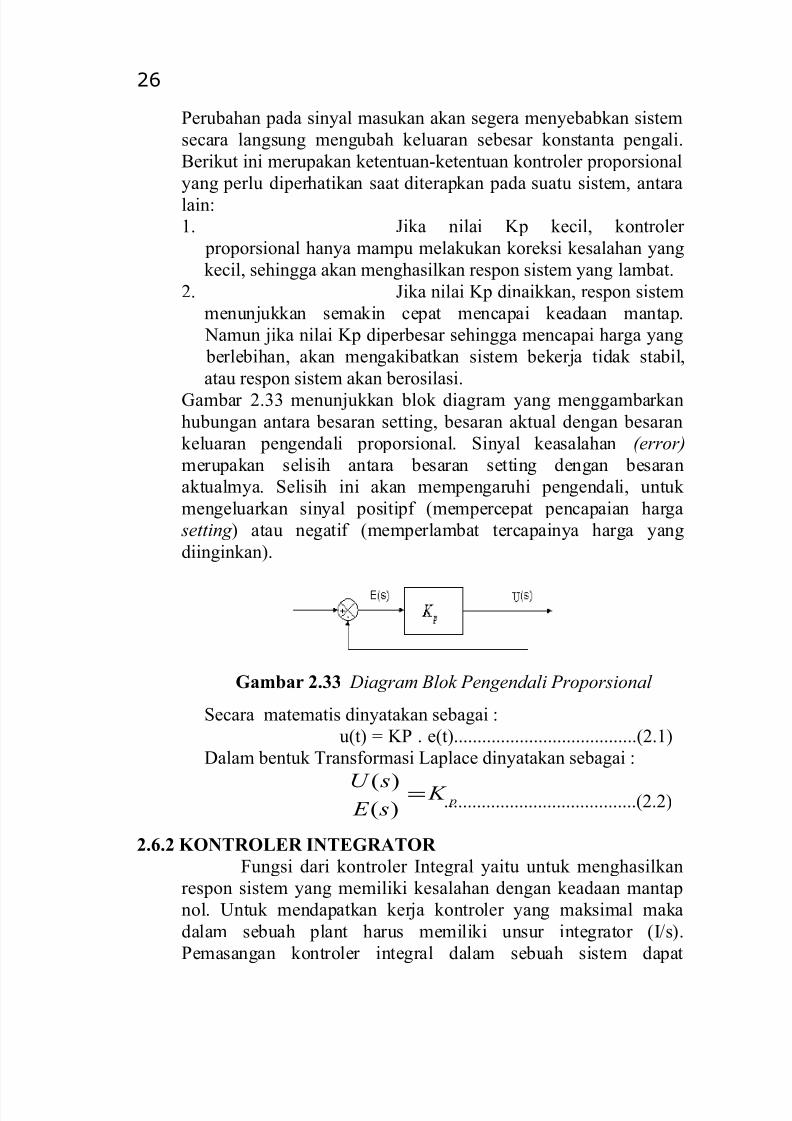
Gambar 2.33 menunjukkan blok diagram yang menggambarkan
hubungan antara besaran setting, besaran aktual dengan besaran
keluaran pengendali proporsional. Sinyal keasalahan (error)
merupakan selisih antara besaran setting dengan besaran
aktualmya. Selisih ini akan mempengaruhi pengendali, untuk
mengeluarkan sinyal positipf (mempercepat pencapaian harga
setting ) atau negatif (memperlambat tercapainya harga yang
diinginkan).
Gambar 2.33 Diagram Blok Pengendali Proporsional
Secara matematis dinyatakan sebagai :
u(t) = KP . e(t).......................................(2.1)
Dalam bentuk Transformasi Laplace dinyatakan sebagai :
.........................................(2.2)
2.6.2 KONTROLER INTEGRATOR
Fungsi dari kontroler Integral yaitu untuk menghasilkan
respon sistem yang memiliki kesalahan dengan keadaan mantap
nol. Untuk mendapatkan kerja kontroler yang maksimal maka
dalam sebuah plant harus memiliki unsur integrator (I/s).
Pemasangan kontroler integral dalam sebuah sistem dapat
26
p K s E sU =)()(

5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 23/28
memperbaiki respon sistem yaitu mempunyai kesalahan (error)
dengan keadaan stabil nol. Hal ini disebabkan terlalu cepat respon
yang dihasilkan oleh pengendali proporsional sehingga sulit
menekan agar sinyal error yang dihasilkan menjadi nol. Keluaran
kontroler integral sangat dipengaruhi olch perubahan yang
sebanding dengan nilai sinyal kesalahan. Keluaran kontroler ini
merupakan jumlahan yang terus menerus dari perubahan masukan.
Kalau sinyal kesalahan tidak mengalami perubahan, keluaran akan
menjaga keadaan seperti sebelum terjadi perubahan masukan.
Beberapa karakteristik yang perlu diperhatikan saat menggunakan
kontroler integral antara lain :
1. Keluaran kontroler membutuhkan
selang waktu tertentu, sehingga kontroler integral cenderung
memperlambat respon.
2. Ketika sinyal kesalahan berharga nol.
keluaran kontroler akan bertahan pada nilai sebelum ada
kesalahan.
3. Jika sinyal kesalahan tidak berharga
nol, keluaran akan menunjukkan kenaikan atau penurunan yang
dipengaruhi oleh besar dari sinyal kesalahan dan nilai Ki.
4. Konstanta integral Ki yang berharga
besar akan mempercepat penghilangan offset. Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan
osilasi dari sinyal keluaran kontroler
Pada gambar 2.34 menunjukkan blok diagram antara besaran
kesalahan dengan keluaran suatu pengendali integral.
Gambar 2.34 Blok Diagram Hubungan Antara Besaran Kesalahan Dengan Pengendali Integral
Secara matematis dinyatakan sebagai :
..............................(2.3)
Dalam bentuk Transformasi Laplace dinyatakan sebagai :
........................................(2.4)
27
∫ =t
i dt t e K t u0
)()(
s
K
s E
sU i
=)(
)(
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 24/28
2.6.3. KONTROLER DIFERENSIAL
Keluaran kontroler diferensial memiliki sifat sama seperti
suatu operasi derivatif. Perubahan yang mendadak pada masukan
kontroler akan mengakibatkan perubahan yang sangat besar dan
cepat.
Karakteristik kontroler diferensial adalah sebagai berikut :
1. Kontroler ini tidak dapat menghasilkan keluaran bila tidak
ada perubahan pada masukan (berupa sinyal kesalahan).
2. Jika sinyal kesalahan berubah terhadap waktu, maka
keluaran yang dihasilkan kontroler tergantung pada nilai Td dan
laju perubahan sinyal kesalahan.3. Kontroler diferensial mempunyai suatu karakter untuk
mendahului, sehingga kontroler ini dapat menghasilkan koreksi
yang signifikan sebelum pembangkit kesalahan menjasi sangat
besar.
Jadi kontroler diferensial dapat mengantisipasi pembangkit
kesalahan, memberikan aksi yang bersifat korektif dan cenderung
meningkatkan stabilitas sistem
Berdasarkan karakteristik kontroler tersebut, kontroler
diferensial secara umum dipakai untuk mempercepat respon awalsuatu sistem, tetapi tidak memperkecil kesalahan pada keadaan
mantap. Kerja kontroler diferensial hanya efektif pada lingkup
yang sempit, yaitu pada periode peralihan. Oleh sebab itu
kontroler diferensial tidak pernah digunakan tanpa ada kontroler
lain sebuah sistem.
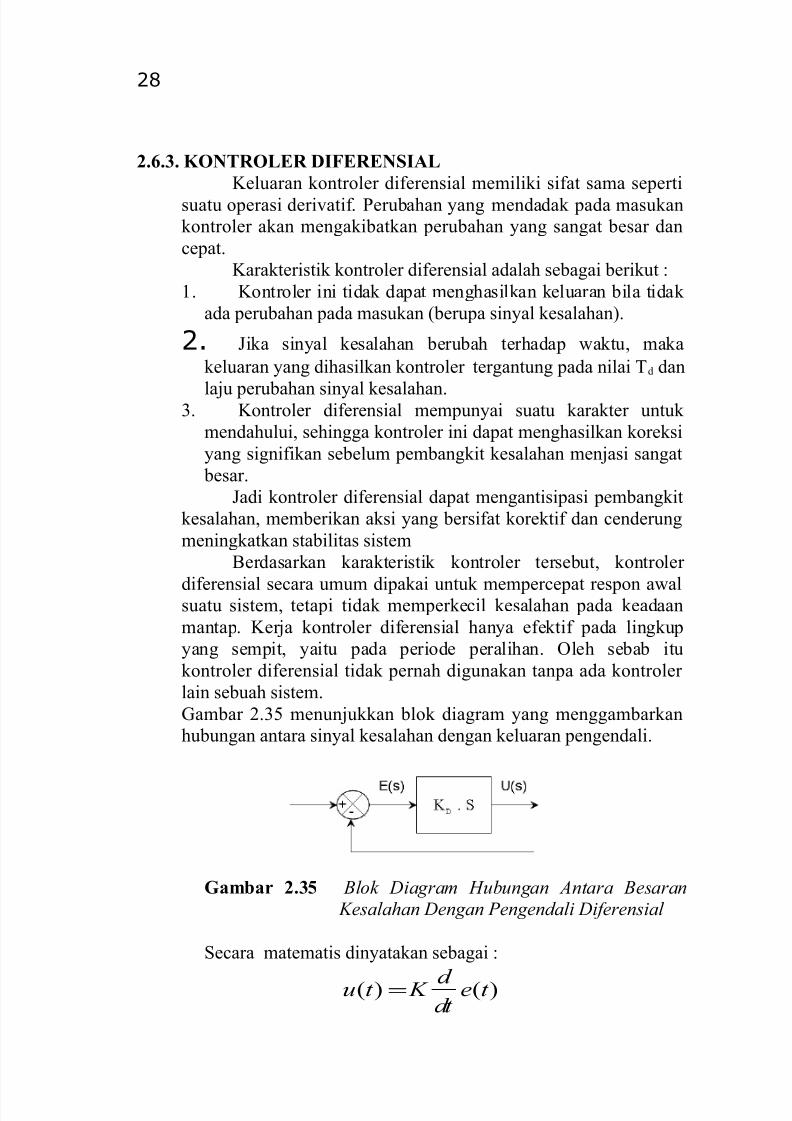
Gambar 2.35 menunjukkan blok diagram yang menggambarkan
hubungan antara sinyal kesalahan dengan keluaran pengendali.
Gambar 2.35 Blok Diagram Hubungan Antara Besaran Kesalahan Dengan Pengendali Diferensial
Secara matematis dinyatakan sebagai :
28
)()( t edt d K t u =
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 25/28
...................................(2.5)
Dalam bentuk Transformasi Laplace dinyatakan sebagai :
...................................(2.6)
2.6.4. KONTROLLER PID
Setiap kekurangan dan kelebihan dari masing – masing
kontroler P, I, D dapat saling menutupi dengan menggabungkan
ketiganya secara paralel menjadi kontroler proporsional plus
integral plus differensial ( kontroller PID ). Elemen – elemen
kontroller P,I, dan D masing – masing secara keseluruhan
bertujuan untuk mempercepat reaksi sebuah sistem,
menghilangkan offset dan menghasilkan perubahan awal yang
besar [3]. Keluaran kontroller PID merupakan jumlahan dari
keluaran kontroller proporsional, integral dan differensial.
Penyetelan konstanta K p, Ti dan Td akan mengakibatkan
penonjolan sifat dari masing – masing elemen. Satu atau dua dari
ketiga konstanta tersebut dapat disetel lebih menonjol dibanding
yang lain. Konstanta yang menonjol itulah yang akan memberi
konstribusi pengaruh pada respon sistem secara keseluruhan.
Kontroller PID memproduksi keluaran yang tergantung
pada magnitud ( besaran ), waktu, dan perubahan rata – rata dari
sinyal error sistem. PID bisa lebih cepat mengurangi error sistem
hingga nol daripada kontroller – kontroller yang lain.
Bagaimanapun kontroller ini harus selalu dituning untuk setiap
proses yang dikontrolagar bisa menghadapi perubahan –
perubahan proses dari waktu ke waktu. Tuning pada kontroller
PID terdiri dari penentuan – penentuan nilai yang sesuai untuk
penguatan ( proportional ) dan waktu ( integral dan differensial ).
Parameter tuning saling berhubungan untuk mengubah keluaran
kontroller dan memproduksi perubahan – perubahan nilai dari
proses variabel.
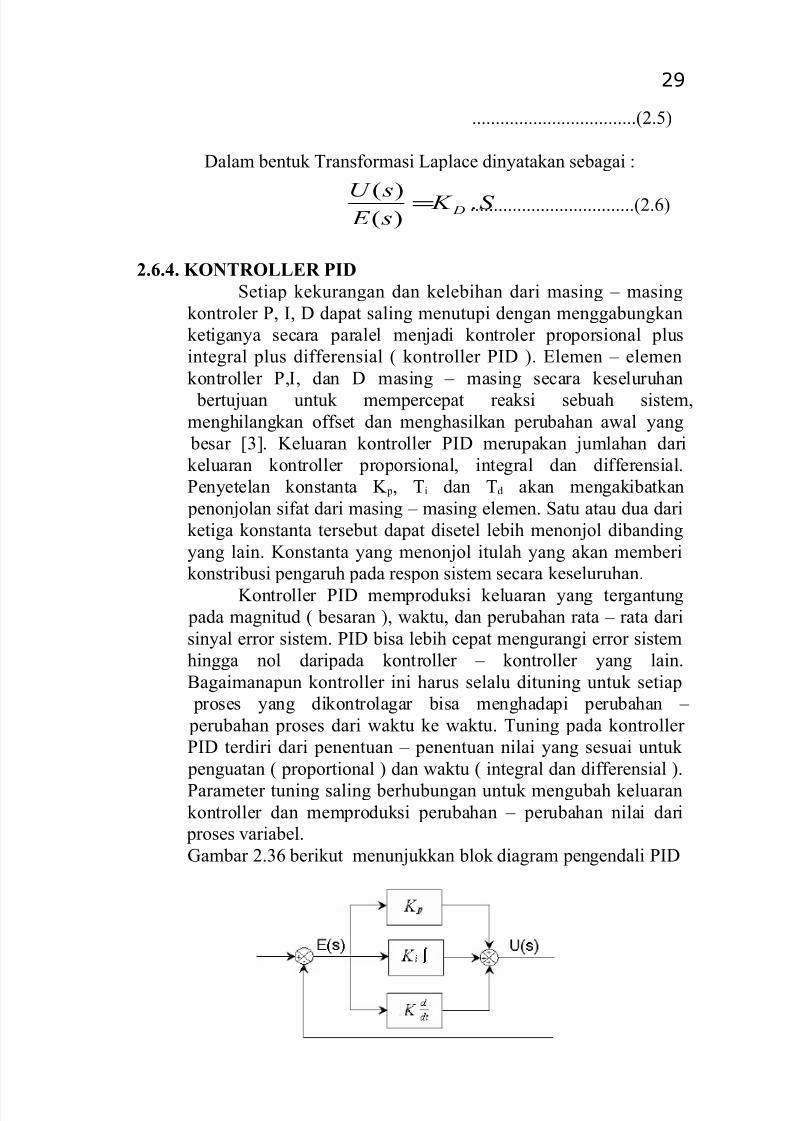
Gambar 2.36 berikut menunjukkan blok diagram pengendali PID
29
S K s E sU D .)()( =
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 26/28
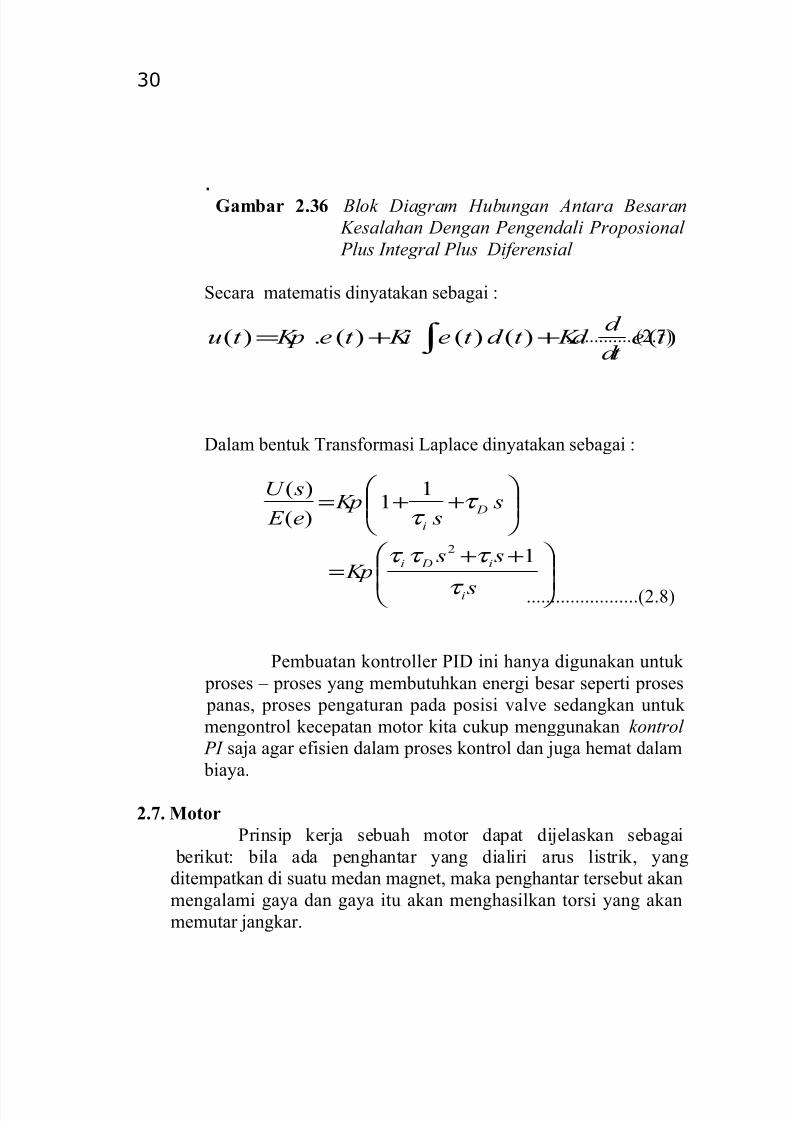
.Gambar 2.36 Blok Diagram Hubungan Antara Besaran
Kesalahan Dengan Pengendali Proposional
Plus Integral Plus Diferensial
Secara matematis dinyatakan sebagai :
...............(2.7)
Dalam bentuk Transformasi Laplace dinyatakan sebagai :
.......................(2.8)
Pembuatan kontroller PID ini hanya digunakan untuk
proses – proses yang membutuhkan energi besar seperti proses
panas, proses pengaturan pada posisi valve sedangkan untuk
mengontrol kecepatan motor kita cukup menggunakan kontrol
PI saja agar efisien dalam proses kontrol dan juga hemat dalam
biaya.
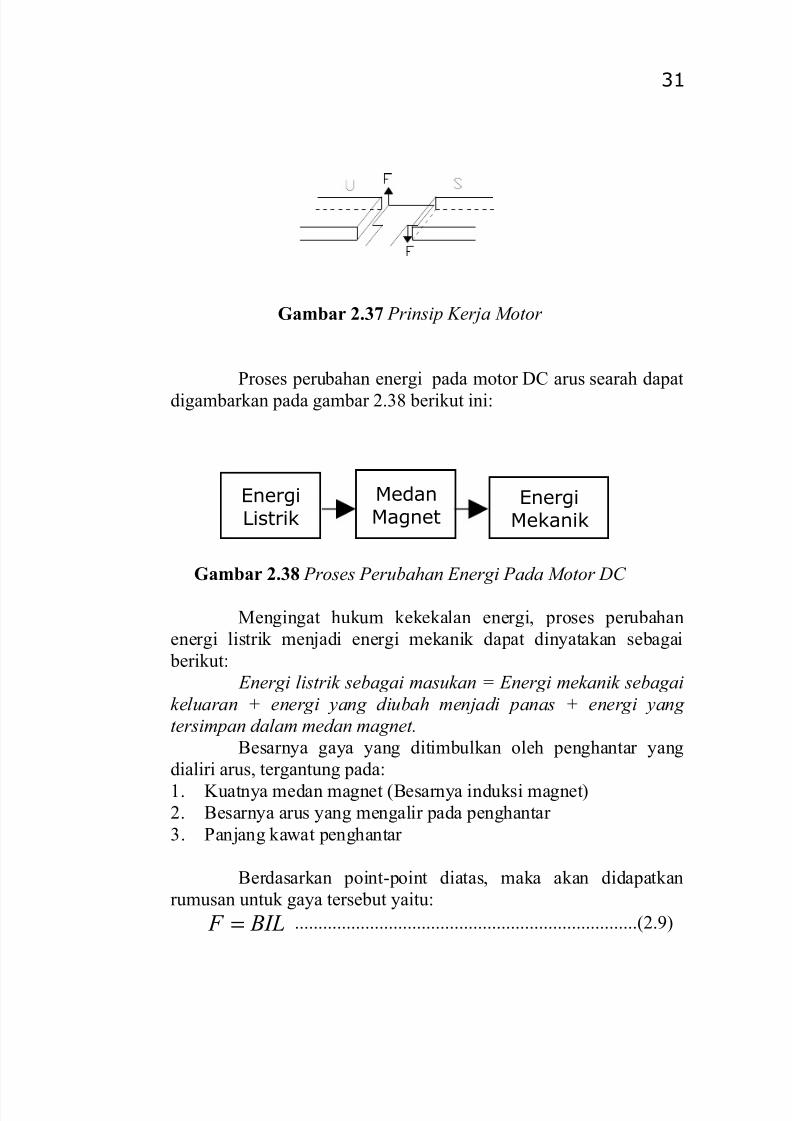
2.7. Motor
Prinsip kerja sebuah motor dapat dijelaskan sebagai
berikut: bila ada penghantar yang dialiri arus listrik, yang
ditempatkan di suatu medan magnet, maka penghantar tersebut akan
mengalami gaya dan gaya itu akan menghasilkan torsi yang akan
memutar jangkar.
30
)()()()(.)( t edt
d Kd t d t e Kit e Kpt u ++= ∫
++=
++=
s
s s Kp
s s
Kpe E
sU
i
i Di
D
i
τ
τ τ τ
τ
τ
1
11
)(
)(
2
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 27/28
Gambar 2.37 Prinsip Kerja Motor
Proses perubahan energi pada motor DC arus searah dapat
digambarkan pada gambar 2.38 berikut ini:
Gambar 2.38 Proses Perubahan Energi Pada Motor DC
Mengingat hukum kekekalan energi, proses perubahan
energi listrik menjadi energi mekanik dapat dinyatakan sebagai
berikut:
Energi listrik sebagai masukan = Energi mekanik sebagai
keluaran + energi yang diubah menjadi panas + energi yang
tersimpan dalam medan magnet.
Besarnya gaya yang ditimbulkan oleh penghantar yang
dialiri arus, tergantung pada:
1. Kuatnya medan magnet (Besarnya induksi magnet)
2. Besarnya arus yang mengalir pada penghantar
3. Panjang kawat penghantar
Berdasarkan point-point diatas, maka akan didapatkan
rumusan untuk gaya tersebut yaitu:
BIL F = .........................................................................(2.9)
31
EnergiListrik
MedanMagnet
EnergiMekanik
5/12/2018 6.BAB II new - slidepdf.com
http://slidepdf.com/reader/full/6bab-ii-new-55a4d8dd57f78 28/28
Halaman Ini Sengaja Dikosongkan
32