#3_hitung peratasdan kuadrat terkecil metode parameter (2)
DESCRIPTION
fsTRANSCRIPT
HITUNG PERATAAN KUADRAT TERKEC IL METODE PARAMETER
SISDANI AGUNG D (1525915)MARTA DWI SETYARINI (1525911)DEVI NOVITA SARI
(1525907)WIDYA AYU ANGGRAENI
(1525904)
T UG AS 3
PENDAHULUAN
• Dalam penggunaan matriks untuk penyelesaian Hitung Kuadrat Terkecil ada beberapa metode yang dapat digunakan, yaitu :
1. Metode Kondisi2. Metode Parameter3. Metode Kombinasi
PENGERTIAN
• Hitung perataan kuadrat terkecil dimaksudkan untuk mendapatkan harga estimasi dari suatu parameter yang paling mendekati harga yang sebenarnya dengan cara menentukan besaran yang tidak diketahui (parameter) dari sekumpulan data ukuran yang mempunyai pengamatan lebih.
• Penyelesaian hitung kuadrat terkecil dilakukan dengan mencari suatu nilai akhir yang unik dengan cara tertentu sehingga jumlah kuadrat residualnya (VTPV) minimum, sehingga tidak mungkin ada nilai hasil hitungan lain yang jumlah kuadrat residualnya (VTPV) lebih kecil. (Hadiman, 1991)
PENGERTIAN
• Nilai parameter yang diperoleh dengan hitung perataan sebenarnya merupakan nilai estimasi terhadap nilai benar atau representasi dari nilai terbaik.
• Prinsip hitung perataan adalah adanya ukuran lebih atau derajat kebebasan. Persamaan untuk menghitung derajat kebebasan (r) adalah :
r = n – uDalam hal ini :n = jumlah pengukuranu = jumlah parameter yang akan dicari
PENGERTIAN
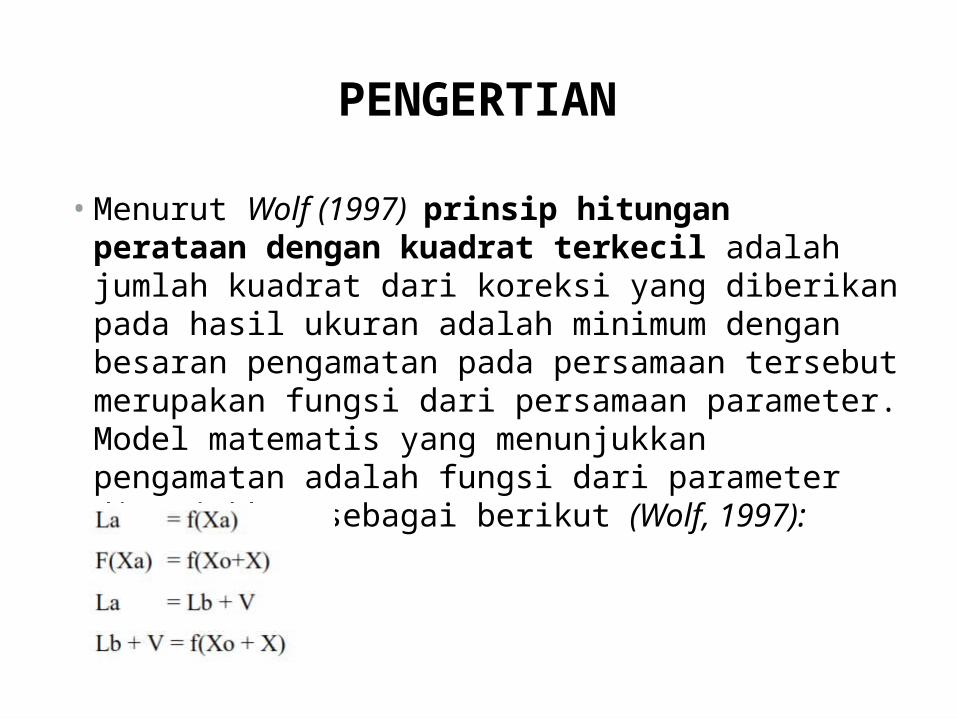
• Menurut Wolf (1997) prinsip hitungan perataan dengan kuadrat terkecil adalah jumlah kuadrat dari koreksi yang diberikan pada hasil ukuran adalah minimum dengan besaran pengamatan pada persamaan tersebut merupakan fungsi dari persamaan parameter. Model matematis yang menunjukkan pengamatan adalah fungsi dari parameter ditunjukkan sebagai berikut (Wolf, 1997):
PENGERTIAN
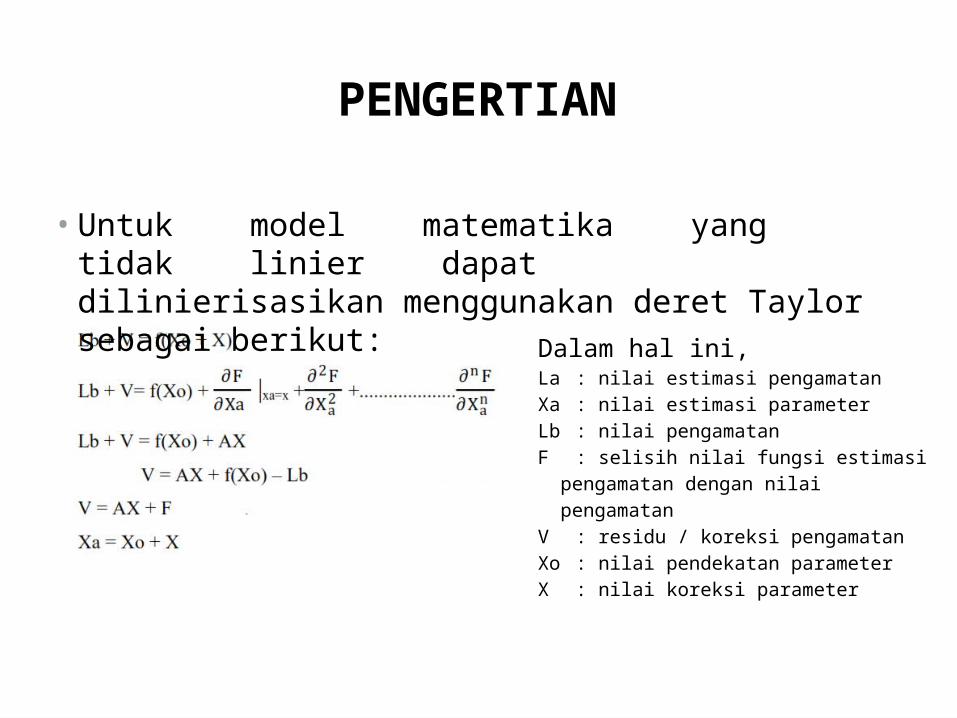
Dalam hal ini,La : nilai estimasi pengamatanXa : nilai estimasi parameterLb : nilai pengamatanF : selisih nilai fungsi estimasi pengamatan dengan nilai pengamatanV : residu / koreksi pengamatanXo : nilai pendekatan parameterX : nilai koreksi parameter
• Untuk model matematika yang tidak linier dapat dilinierisasikan menggunakan deret Taylor sebagai berikut:
PENGERTIAN
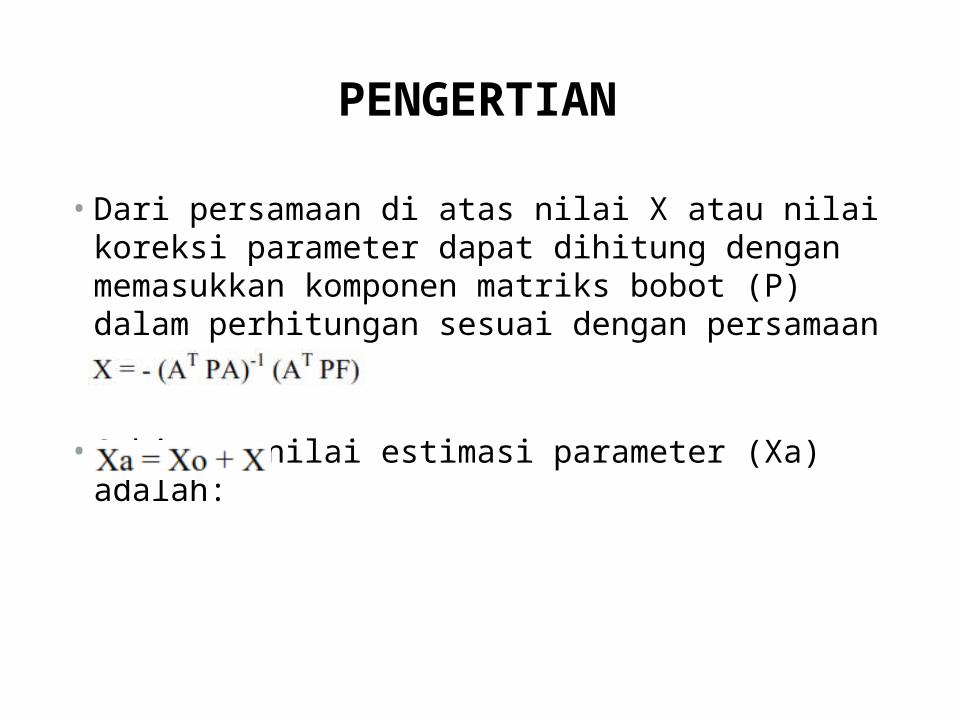
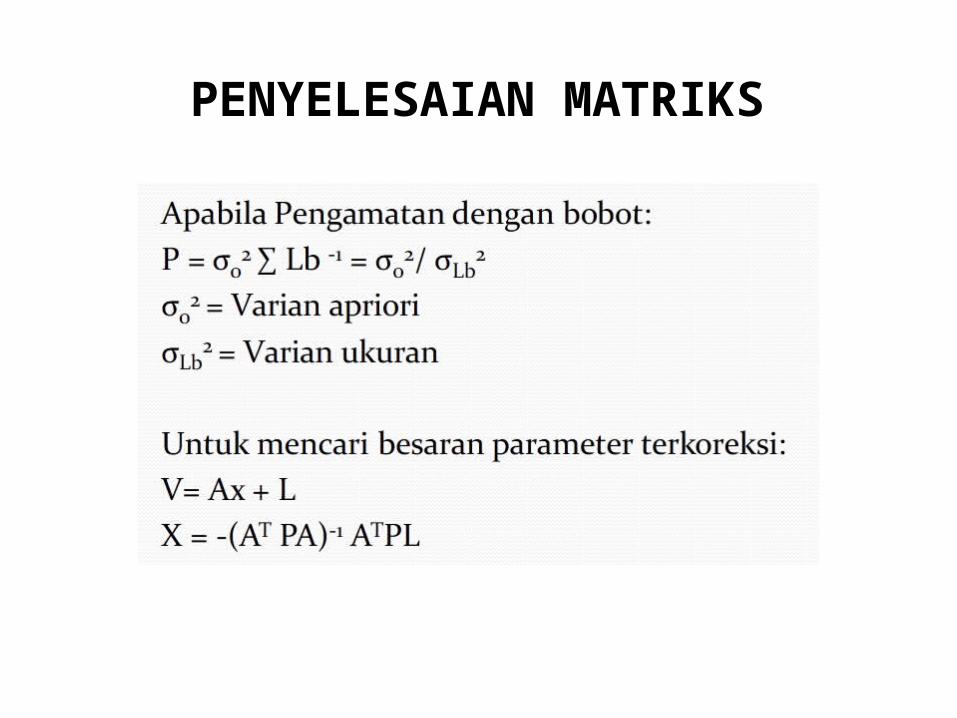
• Dari persamaan di atas nilai X atau nilai koreksi parameter dapat dihitung dengan memasukkan komponen matriks bobot (P) dalam perhitungan sesuai dengan persamaan berikut ini:
• Sehingga nilai estimasi parameter (Xa) adalah:
METODE PARAMETER
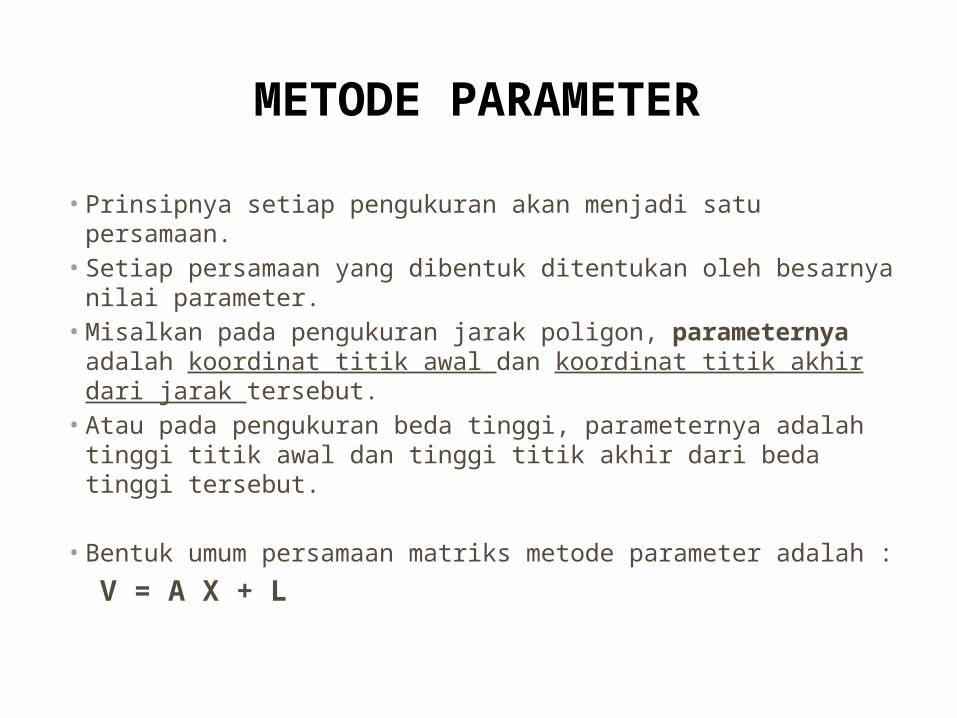
• Prinsipnya setiap pengukuran akan menjadi satu persamaan.• Setiap persamaan yang dibentuk ditentukan oleh besarnya
nilai parameter.• Misalkan pada pengukuran jarak poligon, parameternya
adalah koordinat titik awal dan koordinat titik akhir dari jarak tersebut.
• Atau pada pengukuran beda tinggi, parameternya adalah tinggi titik awal dan tinggi titik akhir dari beda tinggi tersebut.
• Bentuk umum persamaan matriks metode parameter adalah : V = A X + L
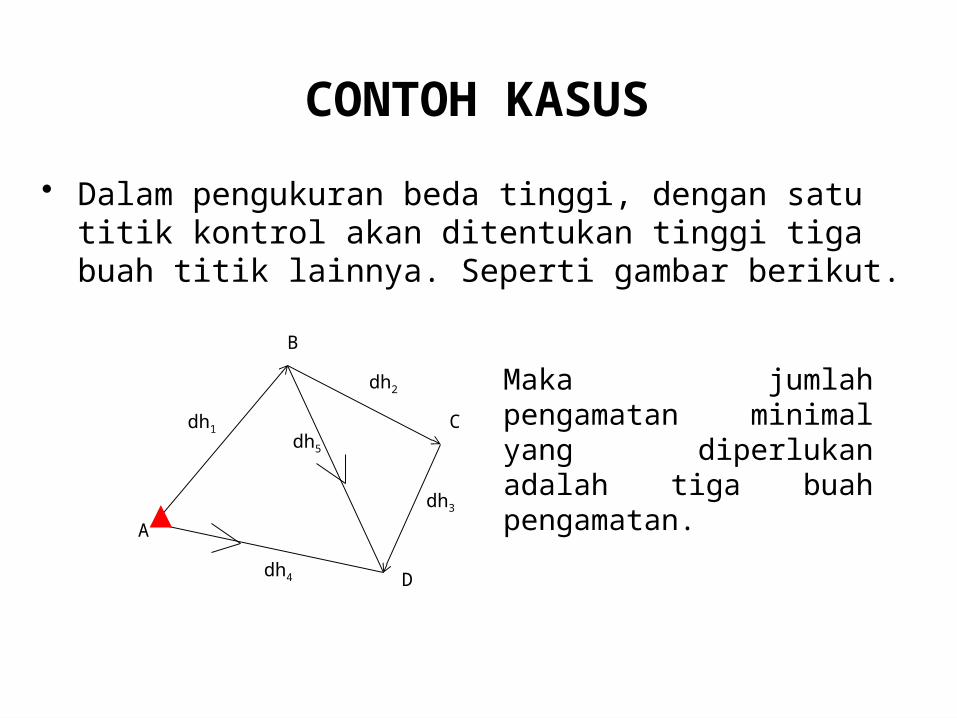
CONTOH KASUS• Dalam pengukuran beda tinggi, dengan satu titik
kontrol akan ditentukan tinggi tiga buah titik lainnya. Seperti gambar berikut.
dh1
dh2
dh3
dh4
dh5
B
A
C
D
Maka jumlah pengamatan minimal yang diperlukan adalah tiga buah pengamatan.
PENYELESAIAN METODE PARAMETER
• Dalam membentuk persamaan parameter, perhatikan jumlah pengukuran (n) dan jumlah parameter yang akan ditentukan (u)
• Dimana jumlah pengukuran harus lebih besar dari jumlah parameter yang akan ditentukan (n>u).
• Dan jumlah persamaan yang terbentuk (r) adalah sama dengan jumlah pengukuran (r = n).
• Semakin besar jumlah pengukuran dibandingkan dengan jumlah parameter yang akan ditentukan, hasilnya akan semakin baik.
DATA
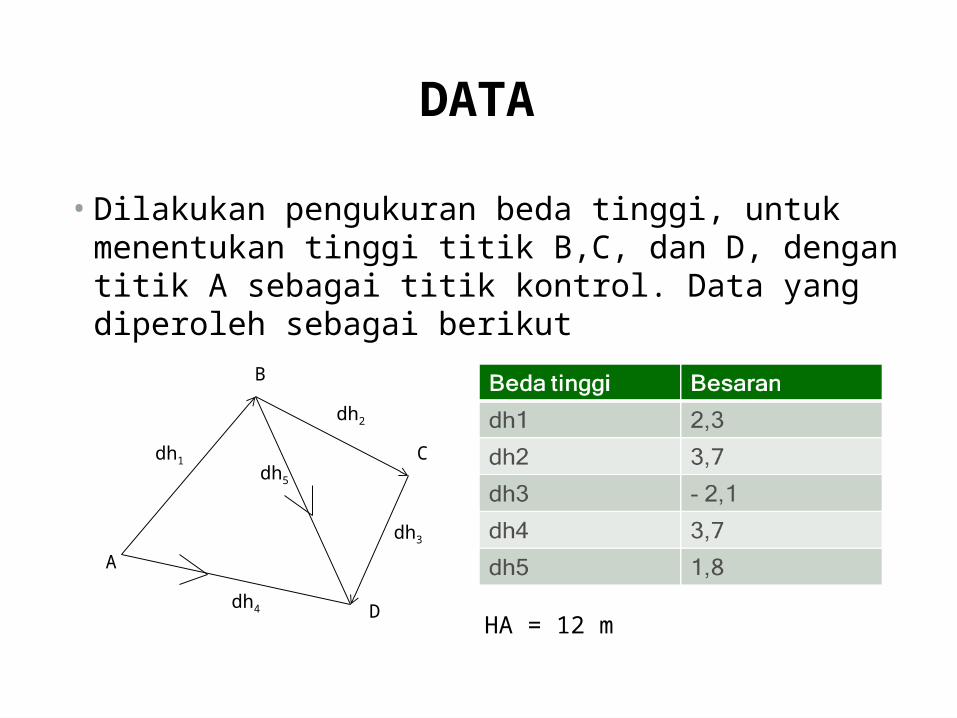
• Dilakukan pengukuran beda tinggi, untuk menentukan tinggi titik B,C, dan D, dengan titik A sebagai titik kontrol. Data yang diperoleh sebagai berikut
dh1
dh2
dh3
dh4
dh5
B
A
C
D HA = 12 m
PERSAMAAN YANG DIPERLUKAN
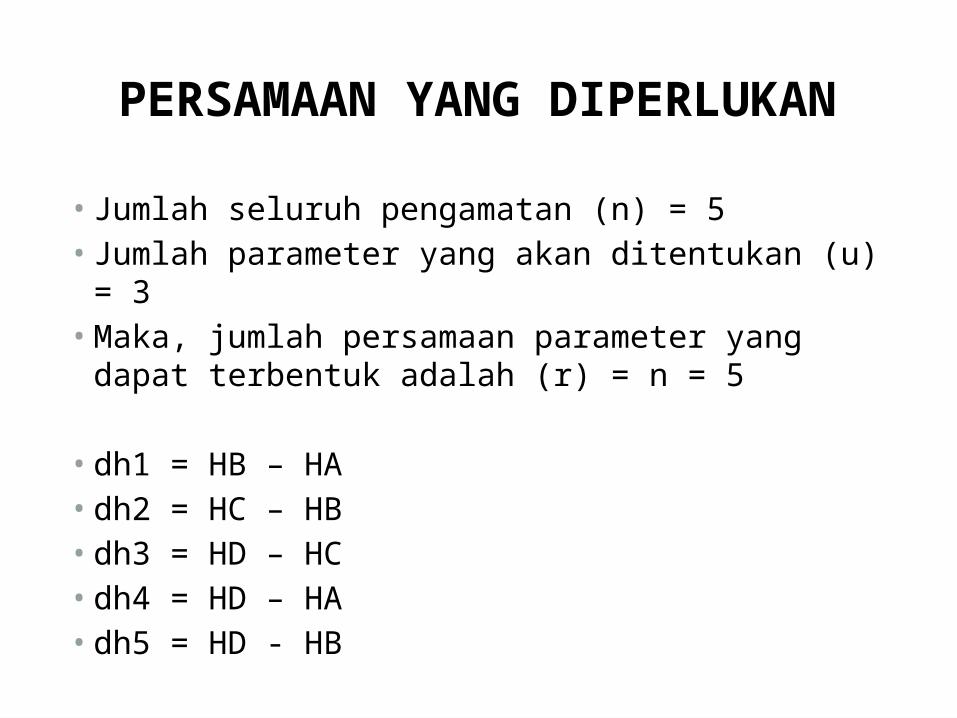
• Jumlah seluruh pengamatan (n) = 5• Jumlah parameter yang akan ditentukan (u) = 3• Maka, jumlah persamaan parameter yang dapat
terbentuk adalah (r) = n = 5
• dh1 = HB – HA• dh2 = HC – HB • dh3 = HD – HC• dh4 = HD – HA• dh5 = HD - HB
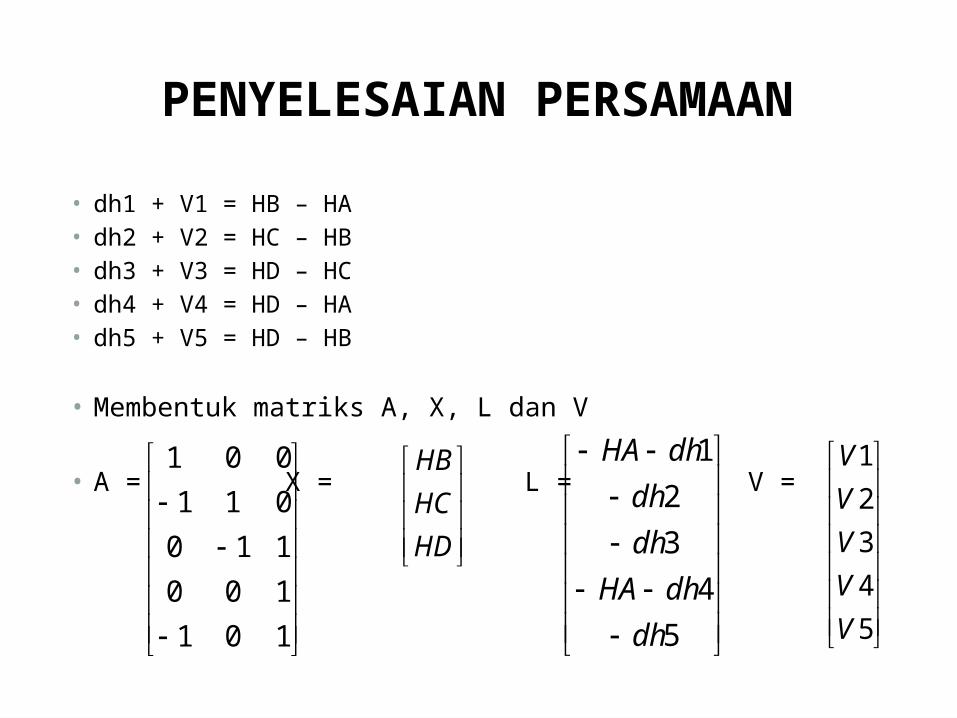
PENYELESAIAN PERSAMAAN• dh1 + V1 = HB – HA• dh2 + V2 = HC – HB • dh3 + V3 = HD – HC• dh4 + V4 = HD – HA• dh5 + V5 = HD – HB
• Membentuk matriks A, X, L dan V
• A = X = L = V =
101100110011001
HDHCHB
54
321
dhdhHA
dhdhdhHA
54321
VVVVV
PENYELESAIAN MATRIKS
HASIL PENYELESAIAN
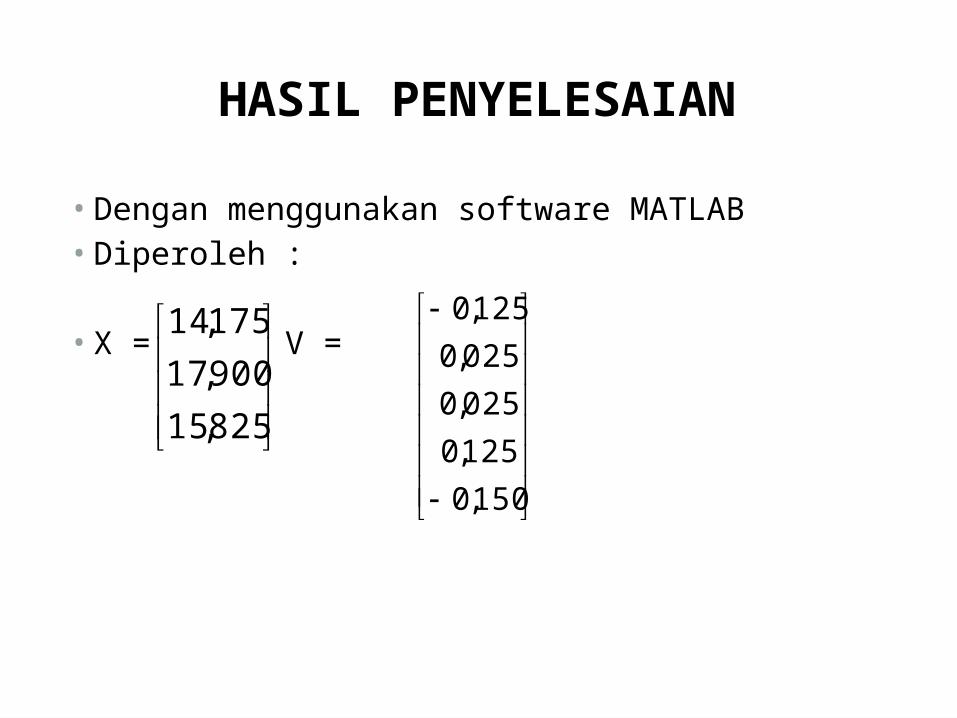
• Dengan menggunakan software MATLAB• Diperoleh :
• X = V =
825,15900,17175,14
150,0125,0025,0025,0125,0
SUMBER
• http://bumise.blogspot.co.id/2015_03_01_archive.html
• http://etd.repository.ugm.ac.id/index.php?mod=download&sub=DownloadFile&act=view&typ=html&id=67527&ftyp=potongan&potongan=S1-2014-269146-chapter1.pdf
• http://ahmadkhatib79.blogspot.co.id/2015/03/aplikasi-aljabar-linier-dalam-hitungan_19.html