digilib.uns.ac.id · ii analisis serat optik multimode inficore 300 terbengkokkan untuk aplikasi...
TRANSCRIPT
i
ANALISIS SERAT OPTIK MULTIMODE INFICORE 300
TERBENGKOKKAN UNTUK APLIKASI PENIMBANGAN
BEBAN KENDARAAN BERJALAN (WEIGH IN MOTION)
TESIS
Disusun untuk Memenuhi Sebagian Persyaratan Mencapai Derajat MagisterProgram Studi Ilmu Fisika
Oleh :
WAHYU HIDAYAT
S911208009
PROGRAM PASCASARJANA
UNIVERSITAS SEBELAS MARET
SURAKARTA
2015
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
ii
ANALISIS SERAT OPTIK MULTIMODE INFICORE 300
TERBENGKOKKAN UNTUK APLIKASI PENIMBANGAN BEBAN
KENDARAAN BERJALAN (WEIGH IN MOTION)
TESIS
OlehWahyu Hidayat
S911208009
Komisi
Pembimbing
Nama Tanda
Tangan
Tanggal
Pembimbing IAhmad MarzukiS.Si, Ph.D
NIP. 19680508 199702 1 001
………….. …………
Pembimbing II Ir. Ari Setyawan, M.Sc, PhD
NIP. 19661204 199512 1 001
………….. …………
Telah dinyatakan memenuhi syaratPada tanggal.… Januari 2015
Ketua Program Studi Ilmu Fisika
Program Pascasarjana UNS
Prof. Drs. Cari, M.Sc., M.A., Ph.DNIP : 19610306 198503 1 002
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
iii
ANALISIS SERAT OPTIK MULTIMODE INFICORE 300
TERBENGKOKKAN UNTUK APLIKASI PENIMBANGAN BEBAN
KENDARAAN BERJALAN (WEIGH IN MOTION)
TESIS
OlehWAHYU HIDAYAT
S911208009
Tim Penguji
Jabatan NamaTandaTangan
Tanggal
KetuaProf. Drs.Cari, M.Sc., M.A., Ph.DNIP . 19610306 198503 1 002 ................... .. Februari 2015
SekretarisDr. AgusSupriyanto, S.Si.,M.SiNIP.19690826 199903 1 001 .................. .. Februari 2015
AnggotaPenguji
Ahmad MarzukiS.Si, Ph.D
NIP. 19680508 199702 1 001.................. .. Februari 2015
Ir. AriSetyawan, M.Sc, PhD
NIP. 19661204 199512 1 001................... .. Februari 2015
Telah dipertahankan di depan PengujiDinyatakan memenuhi syaratPadaTanggal.... Februari 2015
Direktur Program PascasarjanaUNS Ketua Program Studi IlmuFisika
Prof. Dr. Ir. Ahmad Yunus, M.SNIP. 19610717198601 1 001
Prof Drs. Cari, M.Sc., M.A., Ph.DNIP : 19610306 198503 1 002
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
iv
PERNYATAAN ORIENTASI DAN PUBLIKASI TESIS
Sayamenyatakandengansebenarnyabahwa:
1. Tesis yang berjudul: “Analisis Serat Optik Multimode Inficore 300
Terbengkokkan Untuk Aplikasi Penimbangan Beban Kendaraan Berjalan
(Weigh In Motion).” Ini adalah karya penelitian saya sendiri bebas plagiat,
serta tidak terdapat karya yang pernah diajukan orang lain untuk memperoleh
gelar akademik serta tidak terdapat karya atau pendapat yang pernah ditulis
atau diterbitkan orang lain kecuali secara tertulis digunakan sebagian acuan
dalam naskah ini dan disebut dalam sumber acuan serta daftar pustaka. Apabila
di kemudian hari terbukti terdapat plagiat dalam karya ilmiah ini, maka saya
sedia menerima sanksi sesuai ketentuan peraturan perundang- undangan
(Permendiknas No. 17, tahun 2010)
2. Publikasi sebagian atau keseluruhan isi Tesis pada jurnal atau forum ilmiah
lain harus seijin dan menyertakan tim pembimbing sebagai author dan PPs
UNS sebagai institusinya. Apabila dalam waktu sekurang-kurangnya satu
semester (enam bulan sejak pengesahan Tesis) saya tidak melakukan publikasi
dari sebagian atau keseluruhan Tesis ini, maka Prodi Ilmu Fisika PPs-UNS
berhak mempublikasikannya pada jurnal ilmiah yang diterbitkan oleh Prodi
Ilmu Fisika PPs-UNS. Apabila saya melakukan pelanggaran dari ketentuan
publikasi ini, maka saya bersedia mendapatkan sanksi akademik yang berlaku.
Surakarta, Januari 2015
Wahyu Hidayat
S911208009
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
v
MOTTO
Hidayah adalah Anugerah Terindah Yang Pernah Kumiliki,
Pegang Erat Jangan Sampai Lepas
Nglurug tanpa Bala, Digdaya tanpa Aji, Menang Tanpa Ngasorake
Life is like ridding a bycycle. To keep your balance you must keep moving
(Einstein)
Life is a choice, make your life colourful
Wong nandur iku bakale ngunduh,
Gelo mesti neng mburi, mumpung isih gesang tumindak ingkap sae
Kesyukuran adalah poin penting mengarungi kehidupan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
vi
PERSEMBAHAN
Dengan segenap penuh rasa syukur kepada Allah SWT
Kupersembahkan karya indah ini kepada:
Orangtuaku tercinta di Cemani, Sukoharjo
Terimakasih atas kasih sayang yang tiada akhir
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user

vii
Wahyu Hidayat, S911208009. Analisis Serat Optik Multimode INFICORE 300Terbengkokkan Untuk Aplikasi Penimbangan Beban Kendaraan Berjalan (Weigh inMotion). Tesis. Pembimbing I: Ahmad Marzuki S.Si., Ph.D II: Ir. Ari Setyawan, M.Sc, Ph.D.Program Studi Ilmu Fisika, Program Pascasarjana, Universitas Sebelas Maret Surakarta.
ABSTRAK
Tesis ini berisi analisis tentang pengujian prototipe sensor penimbangan beban kendaraanyang sedang berjalan dengan menggunakan konfigurasi silinder rubber berulir yang diberi lilitanserat optik jenis multimode INFICORE 300. Tujuan dari penelitian ini adalah untuk mengetahuisensor penimbangan beban kendaraan berjalan yang dibuat dari serat optik yang terlilit danmengetahui pengaruh kecepatan terhadap perubahan intensitas cahaya yang terdapat pada sensorpenimbangan beban kendaraan berjalan (WIM). Pengujian konfigurasi silinder rubber berulirdimulai dari pengujian jari-jari kritis, pengujian histerisis dan dilanjutkan dengan pengujianpergeseran terhadap transmitansi dan loss. Dari pengujian jari-jari kritis didapatkan hasil bahwapada daerah dengan diameter 1 cm. 1,5 cm, 2 cm dan 2,5 cm merupakan daerah sensitifitasterbaik. Sementara itu pengujian histerisis loss di daearah diameter 1 cm, 1,5 cm, 2 cm dan 2,5cm dengan pergeseran 0,25 cm, 0,5 cm dan 0,75 cm menghasilkan nilai perubahan loss pada saatdiberi tekanan dan saat tekanan dihilangkan secara bertahap dalam batas-batas ketelitianeksperimen adalah sama. Dan pengujian pergeseran terhadap transmitansi dan loss padadiameter 1 cm. 1,5 cm, 2 cm dan 2,5 cm dengan lilitan 1- 4 mendapatkan hasil bahwa semakinkecil diameter maka semakin besar nilai loss dan semakin kecil nilai transmitansinya sedangkansemakin besar diameter maka menyebabkan semakin besar nilai transmitansi dan semakin kecilnilai loss. Sedangkan Pengaruh perubahan kecepatan terhadap perubahan intensitas cahayadalam penelitian ini yaitu semakin besar kecepatan maka nilai perubahan transmitansi akansemakin kecil dan semakin kecil kecepatan akan menyebabkan perubahan nilai transmitansisemakin besar serta posisi penempatan beban tidak mempengaruhi nilai total gaya berat tetapibeban yang diberikan pada kendaraan yang berjalan akan terdistribusi secara merata padamasing-masing sumbu roda kendaraan. Sedangkan posisi penempatan akan mempengaruhipersentase berat yang terdistribusi pada masing-masing sumbu kendaraan.
Kata kunci : Sensor, WIM, Transmitansi Cahaya, Loss, Kecepatan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
viii
Wahyu Hidayat, S911208009. An Analysis on Bended Multimode INFICORE300 Fiber Optic for Weigh in Motion Application. Thesis. First Counselor:Ahmad Marzuki S.Si., Ph.D, Second Counselor: Ir. Ari Setyawan, M.Sc, Ph.D.Physics Study Program, Postgraduate Program, Surakarta Sebelas MaretUniversity.
Abstract
This thesis contained an analysis on the weigh in motion sensory prototypetesting using threaded rubber cylinder configuration with INFICORE 300 fiberoptic coil. The objective of research was to find out the sensor of Weigh inMotion made of coiled fiber optic and to find out the effect of speed on thechanging light intensity existing in weigh in motion (WIM) sensor. The threadedrubber cylinder configuration was tested from critical radius, hysteresis, and shifttests on transmittance and loss. From the critical radius testing, it could be foundthat the area with 1 cm, 1.5 cm and 2.5 cm diameters is the one with the bestsensitivity. Meanwhile, hysteresis loss testing in an area with 1 cm, 1.5 cm, 2 cmand 2.5 cm diameters with shift of 0,25 cm, 0.5 cm, and 0.75 cm showed that thechange of loss when the pressure was applied and when the pressure was removedgradually in the experimental precision limit was equal. And the shift testing onloss transmittance in 1 cm, 1.5 cm, 2 cm and 2.5 cm diameters and 1-4 coilshowed that the smaller the diameter, the larger was the loss value and the smallerwas the transmittance value, while the larger the diameter, the larger was thetransmittance value and the smaller the loss value. Meanwhile, the effect ofchanging speed on the changing light intensity in this research was that the higherthe speed, the smaller was the changing transmittance value, and the lower thespeed, the larger was the transmittance value and the burden positioning did notaffect the total gravitation value but the burden applied to the moving vehicle willbe distributed evenly in each vehicle’s wheel axis. Whereas, the positioning wouldaffected the percentage weigh distributed in each vehicle axis.
Keywords: Sensor, WIM, Light Intensity, Loss, Speed.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
ix
KATA PENGANTAR
Miliaran Ucapan syukur penulis ucapkan kehadirat ALLAH SWT dengan
ucapan Alhamdulillahirobbil ‘Alamin yang telah melimpahkan sehat, rahmat dan
hidayah yang luar biasa poolnya. Syukur tak lupa penulis ucapkan kepada Nabi
Muhammad SAW, keluarganya, para sahabatnya dan umatnya yang selalu
istiqomah dijalan kebenaran.
Tesis yang penulis susun sebagai bagian dari syarat untuk mendapatkan gelar
Magister sains ini penulis beri judul “Analisis Serat Optik Multimode Inficore
300 Terbengkokkan Untuk Aplikasi Penimbangan Beban Kendaraan Berjalan
(Weigh In Motion)”. Terselesaikannya tesis ini adalah suatu kebanggaan tersendiri
bagi saya. Dengan segala suka dan dukanya, akhirnya mampu terselesaikan.
Kepada berbagai pihak yang telah membantu penulis menyelesaikan Tesis ini
penulis ucapkan terima kasih. Atas bantuannya yang sangat besar selama proses
pengerjaan tesis ini, ucapan terima kasih secara khusus penulis sampaikan
kepada:
Bapak Prof. Dr. Ir. Ahmad Yunus, M.S, selaku Direktur Program
Pascasarjana Universitas Sebelas Maret Surakarta.
Bapak Prof. Cari M.Sc. Ph.D dan Ibu Prof. Suparmi M.Sc. Ph. D. selaku
pembimbing Prodi Ilmu Fisika Pasca Sarjana UNS yang telah menerima
penulis bisa kuliah di kampus terindah ini dan terimakasih penulis ucapkan
karena telah banyak mencurahkan waktu, tenaga dan pikiran beliau dalam
menyelesaikan karya indah ini.
Bapak Ahmad Marzuki, S.Si., Ph.D selaku pembimbing satu yang banyak
mencurahkan tenaga dan pikiran beliau dalam menyelesaikan karya ini.
Bapak Ir. H. Ari Setyawan, M.Sc, PhD selaku pembimbing dua yang
banyak mendukung dalam menyelesaikan karya indah ini.
Bapak dan Ibuku (keluarga Kardiman) di Cemani yang amat sangat aku
sayangi dan adikku (Hesti Purnamasari) serta istriku tercinta ( Adinda
Rere ) yang amat aku Cintai terimakasih atas semua kasih sayang dan
perhatian yang luar biasa kepada penulis.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
x
Bapak dan Ibu dosen serta Staff di Prodi Ilmu Fisika Pasca Sarjana UNS
yang telah banyak memberikan ilmu tidak ternilai besarnya bagi penulis.
Sahabat- sahabat di Laboratorium Optics & Photonics Edi Pras, Gio, Mas
Adi, Mbak Titin, Pak Bangun, Pak Agus, Mas Danang Kristianto yang
banyak memberikan inspirasi bagi penulis.
Sahabat – sahabat penulis teman seperjuangan pasca sarjana ilmu fisika
angkatan September 2012 Pak Lukman, Pak Supri, Intan, Visty, Umi,
Ikhtiari dan duo Libya Afrika mas Khaleed Almoqadmi from Naluth dan
Salsabeil Hissen & Ahmed Hissen from Sabha.
PUSJATAN (Pusat Jalan dan Jembatan Nasional) di Bandung yang telah
memberikan bantuan sehingga tesis ini dapat terselaikan dengan lancar.
Semoga amal baik mereka mendapat balasan dari ALLAH SWT .
Perlu disadari bahwa dengan segala keterbatasan, dalam penulisan Tesis
ini masih jauh dari sempurna, sehingga masukan dan kritikan yang membangun
sangat penulis harapkan demi kedepan yang lebih baik dan semoga karya ini
bermanfaat
Surakarta, 03 Februari 2015
Penulis
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xi
PUBLIKASI
Dengan ini saya menyatakan bahwa tesis saya ini yang berjudul
“Analisis Serat Optik Multimode Inficore 300 Terbengkokkan Untuk Aplikasi
Penimbangan Beban Kendaraan Berjalan ( Weigh In Motion).”Telah
dipublikasikan pada tiga tempat diantaranya :
Second International Conference on Technological Advances in Electrical
Electronics and Computer Engineering (TAEECE), April 2014, Kuala Lumpur,
Malaysia dengan “Judul Intensity Modulated Fiber Sensor Configuration
Equipped with a Variable Fiber Optic Attenuator” : ISBN : 978-0-9891305-4-7
2014 SDIWC
Prosiding Seminar Nasional Sains dan Pendidikan Sains IX, Fakultas Sains dan
Matematika UKSW Salatiga 21 Juni 2014,Vol 5, No. 1, ISSN : 2087-0922 dengan
judul “Analisis Cahaya keluaran pada serat optik terbengkokan untuk aplikasi
weigh in motion”
Prosiding Seminar Nasional Matematics and Sciences Forum (MasiF) Fakultas
Pendidikan Matematika dan Ilmu Pengetahuan Alam Universitas PGRI Semarang
23 Agustus 2014, dengan judul “Studi Histerisis Loss pada Serat Optik Berbentuk
Lilitan”
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xii
DAFTAR ISIHalaman
HALAMAN JUDUL ........................................................................................ iHALAMAN PERSETUJUAN........................................................................ iiHALAMAN PENGESAHAN ......................................................................... iiiHALAMAN PERNYATAAN ......................................................................... ivHALAMAN MOTTO ...................................................................................... vHALAMAN PERSEMBAHAN ...................................................................... viHALAMAN ABSTRAK .................................................................................. viiHALAMAN ABSTRACT ............................................................................... viiiKATA PENGANTAR ..................................................................................... ixHALAMAN PUBLIKASI ............................................................................... xiDAFTAR ISI .................................................................................................... xiiDAFTAR TABEL............................................................................................. xivDAFTAR GAMBAR........................................................................................ xvDAFTAR SIMBOL.......................................................................................... xviiiDAFTAR LAMPIRAN.................................................................................... xxBAB I PENDAHULUAN ................................................................................ 1
1.1. Latar Belakang................................................................................ 11.2. Perumusan Masalah........................................................................ 21.3. Batasan Masalah............................................................................. 31.4. TujuanPenelitian............................................................................ 31.5. ManfaatPenelitian .......................................................................... 3
BAB II TINJAUAN PUSTAKA..................................................................... 42.1. Serat Optik...................................................................................... 42.2. Gelombang Elektromagnetik......................................................... 52.3. Pandu Gelombang.......................................................................... 72.4. Karakteristik Transmisi Optik........................................................ 8
2.4.1.Pembiasan (Refraction)......................................................... 82.4.2.Atenuasi............................................................................... 122.4.3.Hamburan Rayleigh (Scattering).........................................2.4.4.Penyerapan (Absorption).....................................................2.4.5.Pemantulan Fresnell............................................................2.4.6.Pelengkungan (Bending).....................................................
13131416
2.5. Kelengkungan dan Jari-Jari Kelengkungan................................. 192.6. WIM (Weight In Motion).............................................................. 21
2.6.1. Sensor Piezoelectric.......................................................... 212.6.2. Sensor Bending Plate......................................................... 222.6.3. Sensor Load Cell............................................................... 232.6.4. Sensor Serat Optik............................................................ 242.6.5. Sensor Capasitive Mats..................................................... 24
2.7. WIM Untuk Sensor Serat Optik................................................ 252.7.1 Sensor Serat Optik Modulasi Intensitas....................... 262.7.2 Sensor Serat Optik Modulasi Panjang Gelombang....... 272.7.3 Sensor Serat Optik Modulasi Phase.............................
2.8. Sistem Akuisisi Data....................................................................2829
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xiii
BAB III METODOLOGI PENELITIAN...................................................... 313.1. Tempat dan Waktu Penelitian ........................................................ 313.2. Alat dan Bahan yang Digunakan....................................................... 31
3.2.1. Alat yang Digunakan............................................................ 323.2.2. Bahan yang Digunakan....................................................... 333.2.3. Software Penunjang............................................................. 34
3.3. Metode Penelitian ........................................................................... 353.3.1. Penyiapan Alat dan Bahan................................................... 363.3.2. Pembuatan Sumber Cahaya, Detektor dan Transmisi Chy..3.3.2.1 Pembuatan Sumber Cahaya.................................................3.3.2.2 Pembuatan Detektor Cahaya...............................................3.3.2.3 Pembuatan Sistem Transmisi Cahaya.................................
36363738
3.4. Pembuatan Silinder Ulir................................................................... 393.4.1. Pembuatan Sistem Serat Optik Silinder Rubber Ulir Berongga 40
3.5. Set up Alat........................................................................................ 433.6 Pengujian Jari- Jari Kritis................................................................. 443.7. Pengambilan Data............................................................................ 453.8. Pengujian Histerisis Loss pada Serat Optik..................................... 453.9. Analisis Data.................................................................................... 473.10 Kesimpulan...................................................................................... 47
BAB IV HASIL DAN PEMBAHASAN........................................................ 484.1. Hasil Uji LDR.................................................................................. 494.2. Hasil Uji Jari-Jari Kritis................................................................... 504.3. Pengujian Transmitansi dan Loss terhadap Pergeseran................... 53
4.3.1.Pengujian Transmitansi Terhadap Pergeseran....................... 554.3.2.Pengujian Loss Terhadap Pergeseran.................................... 594.3.3.Pengujian Histerisis Loss pada Serat Optik Yang Terlilit..... 62
4.4. Hasil Data Pengaruh Perubahan Signal Akibat Pengaruh Variasi MassaBeban Berjalan.......................................................................................
71
4.4.1. Pengujian Variasi Massa Beban Berjalan............................ 714.4.2. Pengujian Variasi Kecepatan Beban Berjalan 80
BAB V PENUTUP ........................................................................................... 855.1. Kesimpulan ..................................................................................... 855.2. Saran ............................................................................................... 85
DAFTAR PUSTAKA ...................................................................................... 86LAMPIRAN ..................................................................................................... 89
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xiv
DAFTAR TABEL
HalamanTabel 3.1. Variasi massa beban bagian belakang....................................... 46Tabel 3.2. Variasi massa beban bagian tengah........................................... 46Tabel 3.3. Variasi massa beban bagian depan............................................ 47Tabel 3.4. Variasi Kecepatan dengan massa beban tetap........................... 47Tabel 4.1. Persamaan garis pada grafik hubungan pergeseran dengan
transmitansi............................................................................. 58Tabel 4.2 Gradien Garis Loss Cahaya Pada Serat Optik.......................... 61Tabel 4.3 Persamaan garis variasi penjumlahan total beban.................... 77Tabel 4.4 Persamaan garis variasi acak posisi penambahan massa beban 79
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xv
DAFTAR GAMBAR
HalamanGambarGambar
2.12.2.
Struktur Serat Optik............................................................Polarisasi Gelombang Elektromagnetik..............................
45
Gambar 2.3. Spektrum Radiasi Elektromagnetik dengan Range PanjangGelombang Untuk Berbagai Macam Warna padaSpektrum Cahaya Tampak.................................................. 6
Gambar 2.4. Pola Mode Melintang di Dalam Pemandu Gelombang PlatSimetris............................................................................... 7
Gambar 2.5. Pemantulan dan Pembiasan cahaya................................... 8Gambar 2.6. Perambatan Sinar dalam Serat Optik .................................. 9Gambar 2.7. Sudut Penerimaan ketika sinar cahaya memasuki serat
optik...................................................................................... 10Gambar 2.8. Sinar Cahaya yang Masuk pada Serat Optik dengan ɸ >
Sudut Kritis......................................................................... 10Gambar 2.9. Loss Transmission in Fiber.................................................. 12Gambar 2.10. Pemantulan Fresnell............................................................ 15Gambar 2.11. Mekanisme Jalannya Cahaya pada peristiwa
pembengkokan Makro......................................................... 16Gambar 2.12. Profil Indeks Bias pada Serat Optik.................................... 17Gambar 2.13. Loss Energi pada Bengkokkan Serat Optik ....................... 18Gambar
Gambar
2.14
2.15.
Geometri Ellips Struktur Perubahan Jari-jari kelengkunganSerat Optik........................................................................Loss Karena Lengkungan dengan Variasi Jari-Jari danJumlah Lilitan ......................................................................
19
20
Gambar 2.16. Linear Quartz Piezo Electric Weigh In Motion ................... 22Gambar 2.17. Sensor Weigh In Motion Bending Plate............................... 23Gambar 2.18. Sensor Single Load Cell....................................................... 24Gambar 2.19 Sistem Weigh in Motion pada Capasitive Mats yang
terhubung dengan sistem akuisisi data................................. 25Gambar 2.20 Kurva Karakteristik sistem Macrobending......................... 27Gambar 2.21 Struktur Umum Sebuah Sistem Serat Optik Sensor............. 28Gambar 3.1. Skema Set- Up Alat Eksperimen.......................................... 31Gambar 3.2 Diagram Alir Penelitian....................................................... 35Gambar 3.3 Rangkaian Sumber Cahaya................................................. 36Gambar 3.4 Rangkaian Detektor Cahaya................................................ 37Gambar 3.5 Konfigurasi Sistem Transmisi Pada Serat Optik................. 38Gambar 3.6. Desain Rubber Berulir......................................................... 39
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xvi
Gambar 3.7. Cetakan Berulir Diameter (a) 1 cm (b) 1,5 cm (c) 2 cm (d)2,5 cm .................................................................................. 40
Gambar 3.8. Cetakan Silinder berulir .................................. 41Gambar 3.9. Set Pompa dan Tabung Campuran rubber .......................... 42Gambar 3.10 Silinder Berulir pada Rubber.............................................. 42Gambar 3.11. Skema tempat Sensor Serat Optik (a) tampak depan (b)
tampak belakang................................................................... 43Gambar 3.12. Rangkaian Arduino Uno................................................... 43Gambar 3.13. Alat Uji Jari-Jari Kritis...................................................... 44Gambar 3.14 Mobil RC dengan posisi tanpa beban.................................. 46Gambar 4.1. Hasil Pengujian LDR hubungan antara intensitas cahaya
dengan tegangan.................................................................. 49Gambar 4.2. Grafik Hubungan Loss dengan Diameter............................ 50Gambar 4.3. Perjalanan Sinar di Dalam Serat Optik Terlilit..................... 54Gambar 4.4. Grafik Hubungan Pergeseran dengan Transmitansi pada
Diameter lilitan (a) 1 cm, (b) 1,5 cm (c) 2 cm, (d) 2,5 cm .. 56Gambar 4.5. Grafik Hubungan Pergeseran dengan Loss pada Diameter
lilitan (a) 1 cm, (b) 1,5 cm (c) 2 cm, (d) 2,5 cm ................. 61Gambar 4.6. Grafik Hubungan Pergeseran dengan Transmitansi pada 1
lilitan pergeseran 0,25 mm variasi diameter (a) 1 cm, (b)1,5 cm (c) 2 cm, (d) 2,5 cm ................................................. 64
Gambar 4.7. Grafik Hubungan Pergeseran dengan Transmitansi pada 1lilitan pergeseran 0,50 mm variasi diameter (a) 1 cm, (b)1,5 cm (c) 2 cm, (d) 2,5 cm ................................................. 65
Gambar 4.8 Grafik Hubungan Pergeseran dengan Transmitansi pada 1lilitan pergeseran 0,75 mm variasi diameter (a) 1 cm, (b)1,5 cm (c) 2 cm, (d) 2,5 cm ................................................. 67
Gambar 4.9 Penggambaran Terjadinya Rugi-Rugi (Loss) pada LilitanSerat Optik .......................................................................... 68
Gambar 4.10. Grafik Hubungan Pergeseran dengan Transmitansi padadiameter1,5 cm, 2 cm dan 2,5 cm (a) 1lilitan pergeseran0,25 mm, (b) 2 lilitan pergeseran 0,25 mm, (c) 3 lilitanpergeseran 0,25 mm, .......................................................... 70
Gambar 4.11. Rafik Hubungan Transmitansi dengan waktu dalampengujian sensor serat optik yang diberi perlakuanpenekanan mobil RC......................................................... 72
Gambar 4.12. Grafik Hubungan Beban Total dengan Kedalaman Lembahpada variasi massa (a) Bagian Depan (b) Bagian tengah (c)Bagian Belakang.................................................................. 74
Gambar 4.13. Grafik Hubungan Beban Total dengan Jumlah KedalamanLembah pada variasi beban (a) Bagian Depan (b) Bagiantengah (c) Bagian Belakang................................................. 76
Gambar 4.14. (a) Grafik Hubungan Beban Total dengan KedalamanLembah pada variasi beban bagian belakang dan (b) 78
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xvii
Grafik Hubungan Beban Total dengan Jumlah KedalamanLembah pada variasi beban bagian belakang......................
Gambar 4.15. Grafik Gabungan variasi depan, tengah, belakang dan acak/ bebas.................................................................................. 79
Gambar 4.16. Grafik Hubungan Transmitansi dan Kecepatan pada rodabelakang RC........................................................................ 80
Gambar 4.17. Grafik Hubungan Transmitansi dan Kecepatan pada rodadepan RC............................................................................. 81
Gambar 4.18. Rubber Silicone yang dipandang sebagai deretan pegas..... 82Gambar 4.19. Pegas yang terkena gaya penekan oleh massa..................... 82Gambar 4.20. Grafik Hubungan Beban Total dengan Kedalaman Lembah
pada dua kecepatan yang berbeda...................................... 84
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xviii
DAFTAR SIMBOL
Satuan= Indeks Bias Medium Pertama= Indeks Bias Medium Kedua= Sudut Sinar Datang Dengan Garis Normal Radian Atau Derajat= Sudut Sinar Bias Dengan Garis Normal Radian Atau Derajat= Sudut Kritis Radian atau Derajt= Sudut Maksimum Radian Atau Derajat
NA = Numerical Aperture Radian Atau Derajat= Indeks Bias Relatif Core dengan Cladding= jumlah mode efektif= Parameter Serat Optik= 3,14= Panjang Gelombang m= Jarak Penjalaran Gelombang Cahaya mɛ = Medan Gelombang Awal J= Penitration Depth= Radius Kelengkungan Serat Optik m= Jari-jari Kritis (Critical Radius) m= Kelengkungan m-1
= KelengkunganMaksimum m= Transmitansi Cahaya a.u= Intensitas Modulasi Watt/m2
= Intensitas Referensi Watt/m2
= Konstanta= Konstanta= Koefisien Atenuasi km-1
= Intensitas Cahaya Masuk Watt/m2
= Intensitas Cahaya Keluar Setelah N Lilitan Watt/m2℃ = suhu Celcius= koefisien refleksi= koefisien transmisiΔ = Indeks Bias Relatif CoreDengan Cladding= Tegangan Modulasi Volt= Tegangan Referensi Volt= Daya Diterima Detektor Watt= Daya Masuk Watt= Faktor Kesebandingan= Arus Listrik AmpereΔ = Perubahan Sudut Radian Atau DerajatΔ = Perubahan Jarak mΔt = perubahan Waktu s
ω = frekuensi sudut radian/ detikk = faktor propagasi gelomabang
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xix
c = kecepatan cahaya m/sv = kelajuan m/s
= Gaya Berat NEk = Energi kinetik JouleEp = Energi potensial JouleI = Implus N.tH = Konstanta kesebandingan (konstanta Planc) J.sᶹ = frekuensi radiasi HzPin = Daya masuk WattPout = Daya Keluar Watts = Panjang ma = diameter inti mR = Radius Bending m
= Profil Indeks bias efektif= Profil Indeks bias awal
dB = Rugi-Rugi Daya dBL = Panjang Kmy = Kedalaman Penetrasi nm
= Jumlah Mode efektif= Jumlah total mode
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
xx
DAFTAR LAMPIRAN
HalamanLampiran 1 Data Pengujian LDR..................................................... 89Lampiran 2 Data Pengujian Nilai Pergeseran Dengan Jari-Jari
Kritis.............................................................................. 90Lampiran 3 Data Pengujian Serat Optik Dengan Variasi Diameter.. 91Lampiran 4 Data Transmitansi Histerisis........................................... 95Lampiran 5 Grafik Gabungan Histerisis............................................ 101Lampiran 6 Data Transmitansi Silikon Rubber Berulir yang Terlilit
Serat Optik Ketika Diberi Beban Statis........................ 106Lampiran 7 Data Pergeseran Silikon Rubber Berulir Terlilit Serat
Optik............................................................................. 112Lampiran 8 Data Transmitansi Cahaya Silikon Rubber Berulir
Terlilit Serat Optik Ketika Dilewati Beban Berjalan...... 113Lampiran 9 Data Variasi Beban Bagian Depan................................ 119Lampiran 10 Data Variasi Beban Bagian Tengah............................... 120Lampiran 11 Data Variasi Beban Bagian Belakang.......................... 121Lampiran 12 Data Kedalaman Lembah dengan Dua Kecepatan
Berbeda........................................................................ 122Lampiran 13 Data Variasi Beban Acak............................................. 123Lampiran 14 Data Tinjauan Transmitansi Silikon Rubber Berulir
terlilit Serat Optik yang Dilewati Beban Berjalandengan Kecepatan Bervariasi....................................... 124
Lampiran 15 Contoh Grafik Transmitansi Silikon Rubber Beruliryang terlilit Serat Optik ketika Dilewati BebanBerjalan....................................................................... 126
Lampiran 16 List Program Arduino................................................ 127
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
1
BAB I
PENDAHULUAN
1.1. Latar Belakang
Transportasi memegang peranan penting guna mendukung kelancaran kegiatan
ekonomi terutama pergerakan barang. Pergerakan barang melalui darat terutama
menggunakan sarana jalan masih menjadi pilihan yang dianggap lebih efisien karena jalan
darat mempunyai keunggulan dalam hal aksesibilitas dan mobilitas. Pilihan ini tentu
berpengaruh terhadap beban lalu lintas di jalan dan mempercepat tingkat kerusakan jalan.
Kerusakan jalan dapat diakibatkan dari 3 faktor yakni faktor perancangan, faktor
pelaksanaan dan faktor operasional. Diantara ketiga faktor tersebut, faktor operasional adalah
yang paling mendominasi. Salah satu dari faktor operasional yaitu banyaknya kendaraan
barang yang melebihi tonase yang menjadi penyebab rusaknya jalan (Solopos, 21 Januari
2014). Kerusakan jalan mengakibatkan lumpuhnya perekonomian, meningkatnya biaya
transportasi karena waktu perjalanan menjadi lebih lama, kerusakan kendaraan akibat
guncangan pada jalan berlubang, dan meningkatnya jumlah kecelakaan lalu-lintas. Salah satu
terobosan baru diantaranya pembuatan sensor beban.
Sensor beban yang selama ini diterapkan di jalan adalah stasiun jembatan timbang.
Berdasarkan PP 43 tahun 1993, jembatan timbang adalah alat penimbangan yang dapat
menimbang kendaraan bermotor sehingga dapat diketahui berat kendaraan dan muatannya
sebagai upaya pengawasan dan pengamanan prasarana dan sarana jalan dan angkutan jalan.
Pada pelaksanaannya di lapangan, Stasiun Jembatan timbang mempunyai beberapa kendala
diantaranya harus berhenti saat pengukuran, biaya konstruksi dan biaya pemeliharaan yang
mahal, kehilangan waktu dan kemacetan lalu lintas (DEPHUB, 1997). Untuk mengatasi
kekurangan dari stasiun jembatan timbang, baru-baru ini telah dikembangkan teknologi baru
yang bernama Weigh in Motion (WIM).
Weigh in motion (WIM) merupakan teknologi pengukuran beban untuk kendaraan
berjalan (Cheng dkk, 2007). Ada beberapa keuntungan pengukuran kendaraan berjalan
menggunakan sistem WIM diantaranya penghematan waktu dan biaya serta menghindari
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
2
kemacetan lalu lintas (Malla dkk, 2008). Sehingga terobosan ini dapat mendukung
modernisasi pada sistem lalu lintas (Corttel, 1992)
Banyak teknologi sensor beban berbasis WIM telah dikembangkan salah satunya
adalah WIM berbasis sensor serat optik (Yuan dkk, 2005). Serat optik memiliki berbagai
kelebihan diantaranya: bandwith yang besar, transmitansi cahaya yang hilang kecil, tahan
terhadap interferensi elektromagnetik, tahan terhadap radiasi serta ukuran dan berat yang
kecil (M. Arumugam, 2001). Pada tahun 2009 harga 1 meter serat grating dipatok oleh
industri serat corning adalah $1000. Harga serat telekomunikasi untuk panjang yang sama
dari corning hanya sekitar $0.20. Berkait dengan kendala harga dan besarnya rugi-rugi yang
ditimbulkan, beberapa orang telah berupaya untuk merekayasa serat optik dari telkom yang
murah itu untuk menjadi sensor serat optik, salah satunya dengan memanfaatkan timbulnya
rugi-rugi pada serat optik karena pembengkokan (Marzuki, 2012).
Prinsip kerja dari sensor serat optik yang digunakan dalam penelitian ini adalah
menggunakan perubahan intensitas. Lekukan yang tajam (macrobend) pada sebuah kabel
serat optik dapat menyebabkan timbulnya rugi daya yang cukup serius dan lebih jauh
kemungkinan terjadinya kerusakan mekanis (pecahnya serat optik). Rugi daya karena
lekukan serat optik sebenarnya dapat dimanfaatkan untuk banyak hal melalui dua cara:
dengan memanfaatkan peningkatan loss yang terjadi di dalam serat optik dan dengan
memanfaatkan cahaya yang lolos dari serat optik. Dengan memanfaatkan rugi-rugi daya
akibat kenaikan atenuasi didalam serat optik yang dilekukan dapat dimanfaatkan salah
satunya adalah untuk membuat sensor beban (Crisp dan Elliot, 2005). Sensor serat optik
berbasis aplikasi Weigh in Motion (WIM) yang akan dibuat dalam penelitian ini,
memanfaatkan rugi-rugi daya yang dihasilkan dari lekukan pada serat optik yang telah
dililitkan pada silinder rubber ulir berongga. Dari hasil penelitian dapat diperoleh grafik linier
yang mencerminkan keterkaiatan antara jari-jari kelengkungan dengan intensitas cahaya dan
kecepatan sehingga hasilnya dapat memunuhi syarat untuk dijadikan sensor berbasis serat
optik dengan aplikasi weight in motion (WIM).
1.2. Perumusan Masalah
Uji loss untuk serat optik yang terlilit dalam Silinder Rubber yang terulir telah
dilakukan. Pertanyaan yang akan dijawab dalam penelitian adalah :
1. Bagaimana serat optik dapat terlilit dibuat menjadi sensor Weigh In Motion (WIM)?
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
3
2. Bagaimana pengaruh kecepatan massa berjalan terhadap loss pada sensor serat optik
berbasis Weigh in Motion (WIM) ?
1.3 Batasan Masalah
Penelitian ini dilakukan dengan batasan :
1. Lilitan dibuat dengan jari-jari di sekitar jari-jari kritis.
2. Sensor dibuat dengan bobot beban hingga 10 ton.
1.4. Tujuan Penelitian
Tujuan dari diadakannya penelitian ini adalah :
1. Mengetahui sensor weigh in motion (WIM) yang dibuat dari serat optik yang
terlilit.
2. Mengetahui pengaruh kecepatan terhadap perubahan intensitas cahaya yang
terdapat pada sensor serat optik berbasis aplikasi weigh in motion (WIM).
1.5. Manfaat Penelitian
Dari hasil penelitian ini manfaat yang diharapkan adalah :
1. Dapat mengetahui manfaat dari serat optik yang terlilit yang dapat
dimanfaatkan sebagai sensor serat optik yang berbasis modulasi intensitas
untuk pemantauan bobot kendaraan berjalan .
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
4
BAB II
TINJAUAN PUSTAKA
2.1 Serat Optik
Serat optik adalah untaian tipis yang terbuat dari kaca atau plastik yang
menghubungkan sumber cahaya ke tempat tujuan (Decusatis, 2006). Struktur dasar serat
optik terdiri dari 3 macam bagian yaitu inti (core), selubung (cladding) dan lapisan
pelindung (coating). Gambar 2.1. menunjukkan struktur serat optik. Inti (core ) berada pada
lapisan yang terdalam kemudian dilapisi lapisan selubung (cladding) dan lapisan terluar
adalah lapisan pelindung (coating).
Gambar 2.1 Struktur Serat Optik
Inti (Core) adalah sebuah material batang silinder dielektrik dan umumnya terbuat dari
kaca atau plastik. Kaca yang digunakan dalam pembuatan inti serat optik ini sangat murni
terbuat dari silikon dioksida. Inti juga merupakan bagian terkecil dari serat optik dan bagian
yang paling mudah pecah. Perambatan cahaya terjadi pada bagian inti. (Woodward dan
Husson, 2005)
Selubung (Cladding) adalah bahan dielektrik yang terbuat dari kaca atau plastik yang
berada mengelilingi lapisan inti dan mempunyai indeks bias lebih kecil dibandingkan inti.
Hal ini berguna agar inti serat optik dapat bekerja secara optimal . Fungsi dari cladding ini
antara lain yaitu mengeksekusi fungsi seperti penurunan hilangnya cahaya dari inti ke udara
sekitar, mengurangi kerugian hamburan di permukaan inti, melindungi serat dari menyerap
permukaan kontaminan dan menambahkan kekuatan mekanik.
Sedangkan lapisan pelindung (Coating) merupakan lapisan bahan yang digunakan untuk
melindungi serat optik dari kerusakan fisik. Bahan yang digunakan untuk buffer adalah jenis
plastik elastik yang berfungsi untuk mencegah terjadinya lecet. (Fidanboylu dan Efendioğlu,
2009).
CoatingCladdingCore
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
5
2.2 Gelombang Elektromagnet
Pada abad ke-17 Sir Isaac Newton mengemukakan teori emisi Newton yakni dari
sumber cahaya dipancarkan partikel-partikel yang sangat kecil dan ringan dengan kecepatan
yang sangat besar. Newton menganggap sinar cahaya seperti arus partikel yang sangat kecil
yang dipancarkan dari sumber cahaya dan bergerak pada garis lurus. Pada penelitian lain,
Christian Huygens menyatakan bahwa cahaya adalah gerak gelombang yang menyebar ke
segala arah dari sumber cahaya dan merambat menembus medium elastik. Kemudian James
Clerk Maxwel mengemukakan bahwa muatan listrik yang dipercepat menimbulkan gangguan
listrik dan magnetik yang menjalar terus-menerus melalui ruang hampa. Jika muatan bergetar
secara periodik menyebabkan munculnya gelombang dengan amplitudo berubah-rubah secara
periodik. Gelombang mempunyai komponen medan listrik dan medan magnet yang saling
tegak lurus. Ditunjukkan pada gambar 2.2 (Pedrotti, 1993).
Gambar 2.2 Polarisasi Gelombang Elektromagnetik (Wiliam dan David, 2009).
Gambar 2.2 Merupakan sebuah gelombang elektromagnetik yang terpolarisasi ke arah
sumbu-x. Komponen medan listrik ditunjukkan dengan simbol , komponen medan magnet
ditunjukkan dengan simbol H dan komponen A merupakan Amplitudo .Medan listrik E dan
medan magnet H merambat saling tegak lurus. Medan magnet merambat secara horizontal
terhadap sumbu-y. Medan listrik merambat secara vertikal terhadap sumbu-x.
Cahaya, panas, radar, gelombang radio, sinar x semuanya merupakan bentuk dari
radiasi elektromagnet. Masing-masing dikarakterisasi oleh sebuah jarak spesifik dari panjang
gelombang. Cahaya tampak memiliki area yang sangat sempit dalam spektrum radiasi
elektromagnetik yaitu pada jarak antara 0,4 μm sampai 0,7 μm. Cahaya putih merupakan
gabungan dari semua warna sesuai gambar 2.2. Sebuah radiasi elektromagnetik yang
menjalar pada ruang hampa disebut kecepatan cahaya yang dirumuskan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
6
c = (2.1)
dimana nilai c adalah 3 10 / (186,000 mil/s). Kecepatan c memiliki hubungan dengan
permitivitas listrik dalam ruang hampa dan permeabilitas magnet dalam ruang hampa.
Sehingga ada hubungan antara c dengan konstanta listrik dan magnetik. Dimana frekuensi v
dan panjang gelombang adalah sebuah fungsi dari c sesuai rumus
(2.2)
Frequensi memiliki satuan Hertz (Hz). Dimana 1 Hz = 1 putaran per sekon.
Gambar 2.3 Spektrum radiasi elektromagnetik dengan range panjang gelombang untuk berbagai macam
warna pada spektrum cahaya tampak (Serway dan Jewett, 2004)
Gambar 2.3 menjelaskan spektrum elektromagnetik sesuai dengan range panjang
gelombang. Tampak pada gambar bahwa range panjang gelombang cahaya tampak adalah
pada range 400 nm sampai 700 nm. Radiasi elektromagnetik dapat dipandang dari perspektif
mekanika kuantum. Radiasi elektromagnetik diartikan sebagai partikel yang terdiri dari
paket-paket energi yang disebut foton (Pedrotti, 1993). Menurut Planck, energi E radiasi
elektromagnetik sebanding dengan frekuensi radiasi v:
(2.3)
Dimana h adalah konstanta kesebandingan atau konstanta Planck yang memiliki nilai
6,63 x 10-34 J.s. Energi foton sebanding dengan frekuensi radiasi dan berbanding terbalik
dengan panjang gelombang.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
7
2.3 Pandu Gelombang
Konsep pemandu gelombang pada prinsipnya terdiri dari dua lapisan bahan kaca atau
silika yang memiliki indeks bias yang berbeda dan dimana < sehingga dapat
merambatkan cahaya dari ujung satu ke ujung yang lain.
Gb 2.4 Pola mode melintang di dalam pemandu gelombang plat simetris (Keiser, 2000)
Medan elektrik di dalam lapisan tipis akan berubah secara sinusoidal pada bidang
melintang yang disebabkan oleh adanya interferensi antara gelombang berjalan naik dan
turun. Penembusan ke lapisan luar bertambah dengan pertambahan orde mode ke-m. Bila m
bertambah maka sudut sinar akan mendekati sudut kritis. Gambar 2.4 menunjukkan adanya
perbedaan mode yaitu mode 1 ditunjukkan dengan , mode 2 dengan dan mode 3
dengan . TE merupakan medan listrik E yang tegak lurus bidang datang dan medan
Magnet B sejajar bidang datang. Selain itu dapat diketahui bahwa mode-mode yang berorde
tinggi dan bersudut curam merambat pada lintasan zig-zag yang lebih panjang daripada yang
berorde lebih rendah. Mode-mode yang mendekati putus adalah mode-mode yang berorde
tinggi dan sinarnya mendekati sudut kritis. Sinar-sinar ini akan mudah disimpangkan di
bawah sudut kritis sehingga medannya akan menembus dalam lapisan luar. Di daerah ini
mode-mode tersebut mengalami penyerapan dan menyusut cepat.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
8
2.4 Karakteristik Transmisi Optik
2.4.1 Pembiasan (Refraction)
Gambar 2.5. Pemantulan dan pembiasan cahaya (Griffiths, 1981)
Pada gambar 2.5 Ir merupakan besar intesitas cahaya yang dipantulkan, It merupakan
besar intensitas cahaya yang dibiaskan dan Ii merupakan besar intensitas cahaya datang.
Selain itu, dapat diketahui bahwa suatu sinar cahaya yang datang dari medium menuju
medium dimana > (indeks bias pertama lebih besar daripada indeks bias kedua)
maka sebagian sinar yang telah mengenai bidang batas akan mengalami pembiasan dan
sebagian lagi mengalami pemantulan. Sinar datang akan dipantulkan dengan sudut sama
besar dengan sudut sinar datang dan sinar bias dibiaskan menjauhi garis normal dengan
sudut .
Perambatan cahaya dalam serat optik mengikuti prinsip pemantulan internal total yang
sesuai dengan Hukum Snell. Hubungan analitis matematis antara dan dan dan
ditemukan melalui eksperimen pada tahun 1621 oleh Willebrord Snellius sebagai berikut:
sin 2.4Dimana dan secara berturut turut adalah nilai indeks bias bahan pertama dan bahan
kedua sedangkan dan berturut turut adalah sudut datang dan sudut bias. Persamaan 2.4
menjunjukkan bahwa Hukum Snell menjelaskan jalannya sinar pada dua medium yang
mempunyai indeks bias berbeda. Indeks bias merupakan perbandingan kecepatan cahaya di
dalam ruang hampa dibanding kecepatan cahaya di dalam medium.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
9
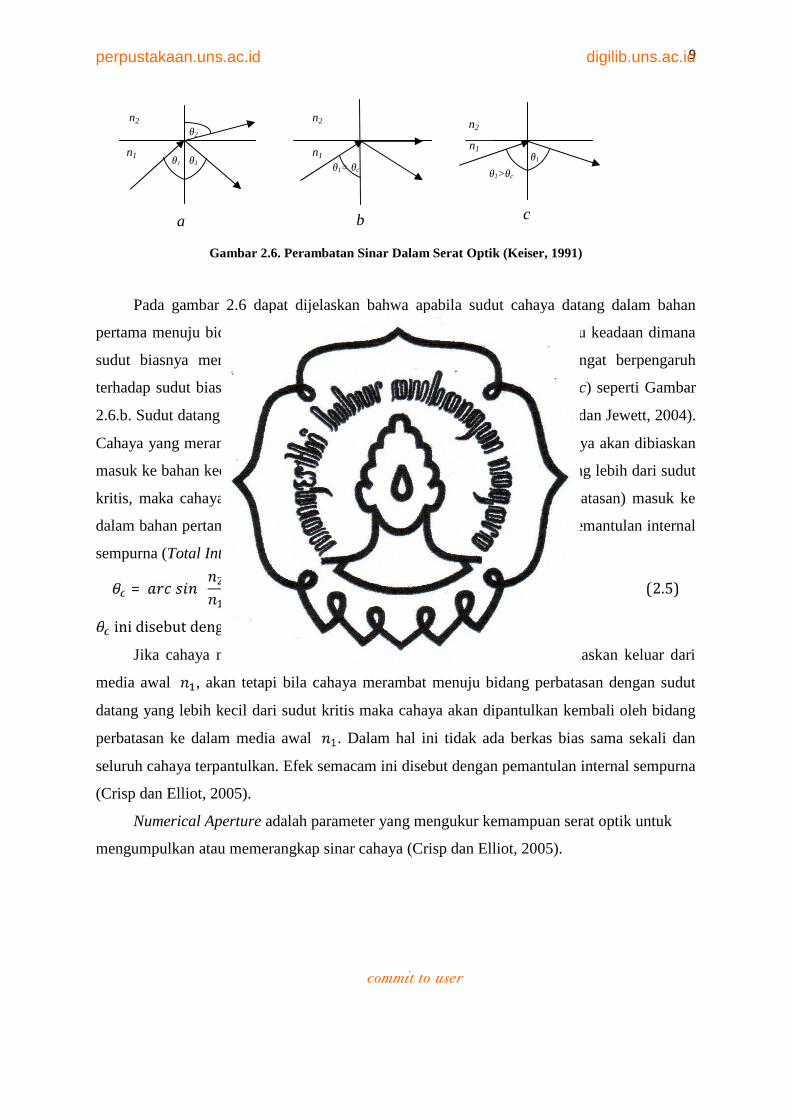
Gambar 2.6. Perambatan Sinar Dalam Serat Optik (Keiser, 1991)
Pada gambar 2.6 dapat dijelaskan bahwa apabila sudut cahaya datang dalam bahan
pertama menuju bidang perbatasan semakin diperbesar, akan tercapai suatu keadaan dimana
sudut biasnya menjadi bernilai 90°. Karena sudut datang tersebut sangat berpengaruh
terhadap sudut bias maka sudut datang ini dinamakan sudut kritis (θ1 = θc) seperti Gambar
2.6.b. Sudut datang dimana hal ini terjadi disebut sudut kritis ( ) (Serway dan Jewett, 2004).
Cahaya yang merambat dengan sudut datang kurang dari sudut kritis, cahaya akan dibiaskan
masuk ke bahan kedua. Namun, cahaya yang merambat dengan sudut datang lebih dari sudut
kritis, maka cahaya tersebut akan dipantulkan kembali (oleh bidang perbatasan) masuk ke
dalam bahan pertama seperti gambar 2.6 c.. Keadaan ini disebut sebagai pemantulan internal
sempurna (Total Internal Reflection)= (2.5)inidisebutdengansudutkritis ( ).
Jika cahaya merambat melebihi sudut kritis maka cahaya akan dibiaskan keluar dari
media awal , akan tetapi bila cahaya merambat menuju bidang perbatasan dengan sudut
datang yang lebih kecil dari sudut kritis maka cahaya akan dipantulkan kembali oleh bidang
perbatasan ke dalam media awal . Dalam hal ini tidak ada berkas bias sama sekali dan
seluruh cahaya terpantulkan. Efek semacam ini disebut dengan pemantulan internal sempurna
(Crisp dan Elliot, 2005).
Numerical Aperture adalah parameter yang mengukur kemampuan serat optik untuk
mengumpulkan atau memerangkap sinar cahaya (Crisp dan Elliot, 2005).
n1
θ2
n2
θ1
θ1>θc
θ1 θ1n1 n1
n2 n2
a b c
θ1= θc
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
10
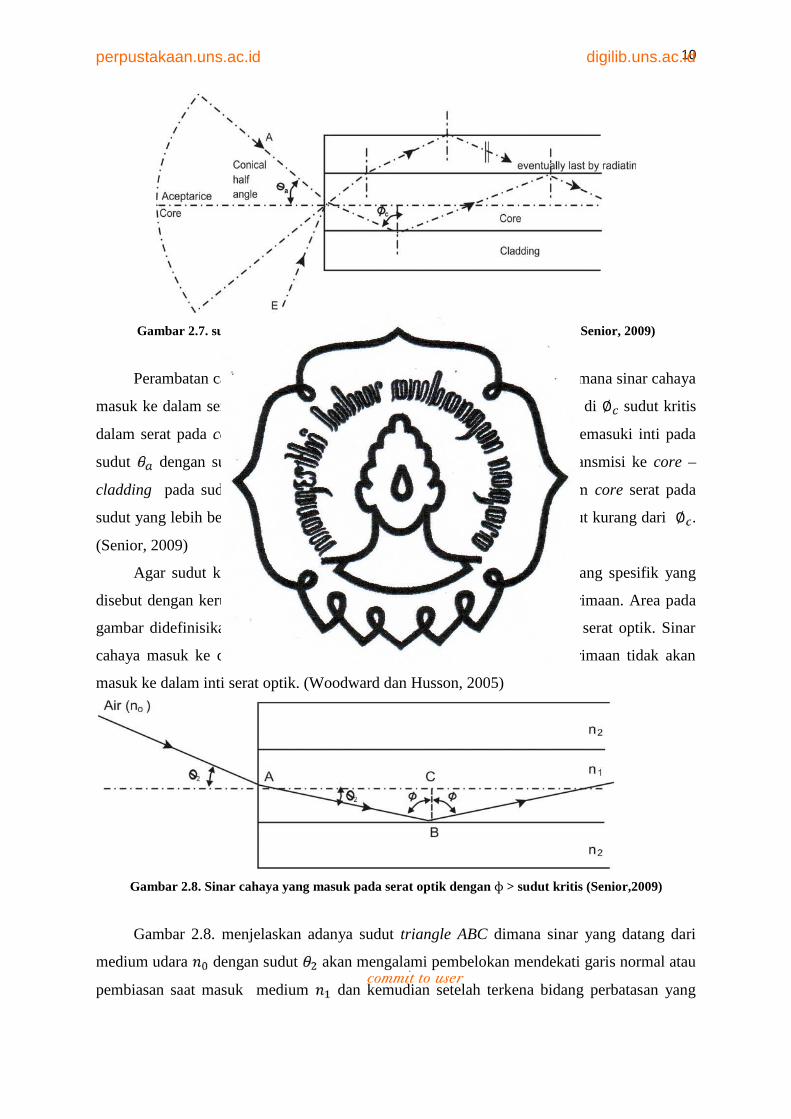
Gambar 2.7. sudut penerimaan ketika sinar cahaya memasuki serat optik (Senior, 2009)
Perambatan cahaya dalam serat optik bergantung kepada titik awal dimana sinar cahaya
masuk ke dalam serat optik. Gambar 2.7 menunjukkan sinar meridional A di ∅ sudut kritis
dalam serat pada core-cladding. Dari gambar ditunjukkan bahwa sinar memasuki inti pada
sudut dengan sumbu serat dan dibiaskan pada core udara sebelum transmisi ke core –
cladding pada sudut kritis pada serat. Setiap sinar yang datang ke dalam core serat pada
sudut yang lebih besar dari akan dikirimkan ke core-cladding pada sudut kurang dari ∅ .
(Senior, 2009)
Agar sudut kritis tetap terjaga, sinar harus masuk dengan range yang spesifik yang
disebut dengan kerucut penerimaan atau lebih dikenal dengan sudut penerimaan. Area pada
gambar didefinisikan oleh sebuah kerucut yang diperluas keluar dari inti serat optik. Sinar
cahaya masuk ke dalam inti dari luar kerucut atau melebihi sudut penerimaan tidak akan
masuk ke dalam inti serat optik. (Woodward dan Husson, 2005)
Gambar 2.8. Sinar cahaya yang masuk pada serat optik dengan ɸ> sudut kritis (Senior,2009)
Gambar 2.8. menjelaskan adanya sudut triangle ABC dimana sinar yang datang dari
medium udara dengan sudut akan mengalami pembelokan mendekati garis normal atau
pembiasan saat masuk medium dan kemudian setelah terkena bidang perbatasan yang
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user

11
memiliki indeks bias atau perbatasan core dan cladding sinar mengalami pemantulan
internal sempurna, hal ini terjadi dikarenakan sudut datang sinar lebih besar daripada sudut
kritis. Dari persamaan 2.29 tentang hukum Snellius dan sesuai gambar 2.8 tentang triangle
sudut ABC maka diperoleh :ɸ = − (2.6)
Dimana 1lebih besar daripada sudut kritis pada interface core –cladding, kemudian jika
disubtitusi pada persamaan 2.4 menjadisin = ɸ(2.7)Dengan menggunakan hubungan trigonometri ɸ+ ɸ= 1 , sehingga persamaan 2.7
dapat menjadisin = (1 − ɸ) (2.8)Ketika kasus dibatasi untuk total internal reflection, dimana menjadi sama dengan
sudut kritis untuk core dan cladding interface yang diberikan pada persamaan 2.5 dimana
menjadi dikombinasikan dengan persamaan 2.8 sehingga menjadisin = ( − ) (2.9)Sehingga= sin = ( − ) (2.10)Pertsamaan 2.10 menjelaskan bahwa Numerical Aperture (NA) sebanding dengan sudut
datang terbesar yang dapat diterima pemandu dan diteruskan. NA sering digunakan untuk
serat optik di udara dimana adalah kesatuan, hal itu sama dengan sin . Atau dalam range
0 ≤ ≤ sinar akan disebar di dalam serat optik. NA dapat juga dinyatakan dengan
perbedaan indeks bias relatif antara core dan cladding= ≃ untuk ≪ 1 (2.11)Kemudian digabungkan dengan persamaan 2.10 menjadi= (2 ) (2.12)Hubungan antara persamaan 2.10 dan 2.12 untuk numerical aperture adalah sangat berguna
untuk pengukuran kemampuan pengumpulan cahaya pada serat optik. (Senior, 2009).
Umunya NA pada single mode serat optik adalah 0,1 dan untuk serat optik multimode
berkisar 0,2 sampai 0,3. (Keiser, 2000).
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
12
2.4.2 Atenuasi
Atenuasi adalah rugi-rugi atau pelemahan energi atau daya yang dibawa oleh cahaya.
Besaran pelemahan energi sinyal informasi dari serat optik dinyatakan dalam deci-Bell (dB).
Atenuasi menyebabkan pelemahan energi sehingga amplitudo gelombang yang sampai pada
penerima menjadi lebih kecil daripada yang dikirimkan oleh pemancar (Keiser, 2000). Besar
atenuasi dapat dicari dengan persamaan:10 2.13Dari persamaan 2.13 dapat dijelaskan bahwa besarnya nilai atenuasi dalam satuan dB atau
deci-Bell diperoleh dari logaritma perbandingan nilai P2 atau Daya yang diterima detektor
(Watt) dibanding dengan nilai P1 Daya awal yang masuk (Watt)
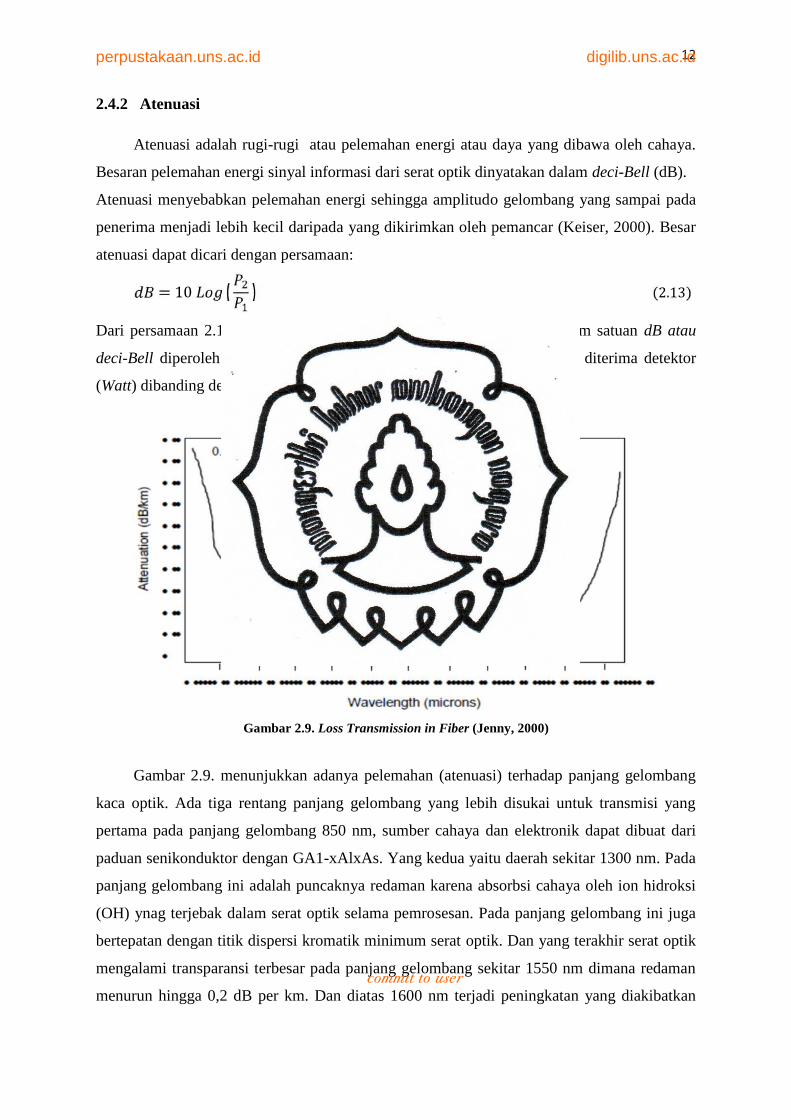
Gambar 2.9. Loss Transmission in Fiber (Jenny, 2000)
Gambar 2.9. menunjukkan adanya pelemahan (atenuasi) terhadap panjang gelombang
kaca optik. Ada tiga rentang panjang gelombang yang lebih disukai untuk transmisi yang
pertama pada panjang gelombang 850 nm, sumber cahaya dan elektronik dapat dibuat dari
paduan senikonduktor dengan GA1-xAlxAs. Yang kedua yaitu daerah sekitar 1300 nm. Pada
panjang gelombang ini adalah puncaknya redaman karena absorbsi cahaya oleh ion hidroksi
(OH) ynag terjebak dalam serat optik selama pemrosesan. Pada panjang gelombang ini juga
bertepatan dengan titik dispersi kromatik minimum serat optik. Dan yang terakhir serat optik
mengalami transparansi terbesar pada panjang gelombang sekitar 1550 nm dimana redaman
menurun hingga 0,2 dB per km. Dan diatas 1600 nm terjadi peningkatan yang diakibatkan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
13
adanya penyerapan. (Power, 1993) pada dasarnya hilangnya energi cahaya di dalam serat
optik ada dua yaitu bahan inti serat optik tidak cukup jernih atau kotor dan cahaya dibelokkan
ke arah yang salah (Crisp dan Elliot, 2005).
Beberapa hal yang menyebabkan terjadinya atenuasi dalam serat optik yaitu hamburan
Rayleigh (scattering), Penyerapan (absorption), Pemantulan Fresnel dan pembengkokan
(bending losses).
2.4.3 Hamburan Rayleigh (Scattering)
Ketika cahaya melewati sebuah material yang mempunyai indeks bias yang berbeda,
beberapa cahaya akan terhambur pada permukaan antara dua medium selama medium adalah
transparan, hamburan tersebut disebut hamburan Rayleigh. Hamburan Rayleigh merupakan
efek terpancarnya cahaya akibat terjadinya perubahan kecil yang bersifat lokal pada indeks
bias bahan inti dan bahan mantel. Dikatakan bersifat lokal, karena hanya terjadi di lokasi-
lokasi tertentu dan ukuran daerah yang terkena pengaruh perubahan ini sangat kecil, yaitu
kurang dari satu panjang gelombang cahaya. Hamburan Rayleigh disebabkan oleh adanya
ketidakmerataan adonan bahan-bahan pembuat serat optik dan pergeseran-pergeseran kecil
pada kerapatan bahan. (Crisp dan Elliot, 2005)
2.4.4 Penyerapan (Absorption)
Penyerapan cahaya oleh suatu molekul merupakan suatu bentuk interaksi antara
gelombang cahaya (foton) dengan atom / molekul. Energi yang diserap oleh atom/ molekul
akan digunakan elektron di dalam atom untuk bertransisi dari suatu level energi ( ) ke
tingkat energi elektronik yang lebih tinggi ( ). Penyerapan hanya terjadi jika selisih kedua
tingkat energi elektronik (∆ = − ) bersesuaian dengan energi cahaya yang datang
yakni :∆ = (2.14)
Penyerapan terjadi pada saat foton bertumbukan langsung pada suatu material dan
menyerahkan energinya pada elektron atom. Foton mengalami perlambatan dan akhirnya
berhenti, sehingga pancaran sinar yang keluar dari material berkurang dibanding saat masuk
ke material. Absorbansi menyatakan banyaknya cahaya yang diserap oleh suatu lapisan tipis
dari total yang dilewatkan pada lapisan tipis.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
14
Penyerapan terjadi karena tiga faktor yaitu disebabkan oleh adanya deffect atomic pada
komposisi kaca, adanya penyerapan dari luar dan juga adanya penyerapan dari dalam. Faktor
deffect atomic disebabkan karena ketidaksempurnaan dari material struktur atom pada serat
optik diantaranya kehilanghan molekul, area kerapatan yang tinggi dan oxygen deffect dalam
struktur kaca. (Keiser, 2000) Faktor dari dalam disebabkan karena bahan pembuat itu sendiri.
Sedangkan faktor dari luar terjadi karena campuran dalam serat. Zat kotoran (impurity) atau
apapun yang masih tersisa di dalam bahan inti akan menyerap sebagian energi cahaya yang
merambat di dalam serat optik. Zat kotoran yang tersisa dalam inti diantaranya yaitu logam
Iron, Chromium, Cobalt, Copper dan ion OH.
2.4.5 Pemantulan Fresnel
Pemantulan merupakan kejadian dimana cahaya terpantul pada medium. Pada saat
cahaya melewati medium menuju medium dimana > (indeks bias pertama lebih
besar daripada indeks bias kedua) dimana sudut datang mendekati garis normal (90 ), maka
sebagian besar cahaya akan dibiaskan menembus bidang perbatasan seperti dalam gambar 2.9
(a). Namun sebagian kecil dari cahaya yang datang dan hendak memasuki serat optik akan
terpantul balik oleh bidang perbatasan udara – inti seperti gambar 2.9 (b). Besarnya sudut
pemantulan sama dengan sudut datangnya cahaya, hal ini disebut dengan pemantulan Fresnel.
Pemantulan cahaya harus mempertimbangkan cahaya yang hilang ketika beberapa medium
saling berhadapan (Woodward dan Husson, 2005). Augustin Fresnel menjelaskan besarnya
cahaya yang hilang pada pemantulan Fresnel ketika melewati medium satu ke medium yang
lain dengan persamaan Fresnel sebagai berikut (Crisp dan Elliot, 2005):
= ( )( ) (2.15)
Persamaan 2.15 dapat dijelaskan bahwa nilai R yang merupakan koefisien redaman refleksi
Fresnel didapatkan dari pengurangan indeks bias relatif core dengan indeks bias udara dikuadratkan kemudian hasilnya dibagi kuadrat dari penjumlahan indeks bias relatif core dengan indeks bias udara . Hal ini berarti pemantulan Fresnel bergantung pada perbedaan
relatif antara dua indeks bias. Tingkat daya cahaya yang dipantulkan tergantung pada
kehalusan permukaan batas.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
15
Gambar 2.10. (a) Pemantulan Fresnel, (b) Pemantulan Fresnel di setiapBidang Batas (Crisp dan Elliot, 2005)
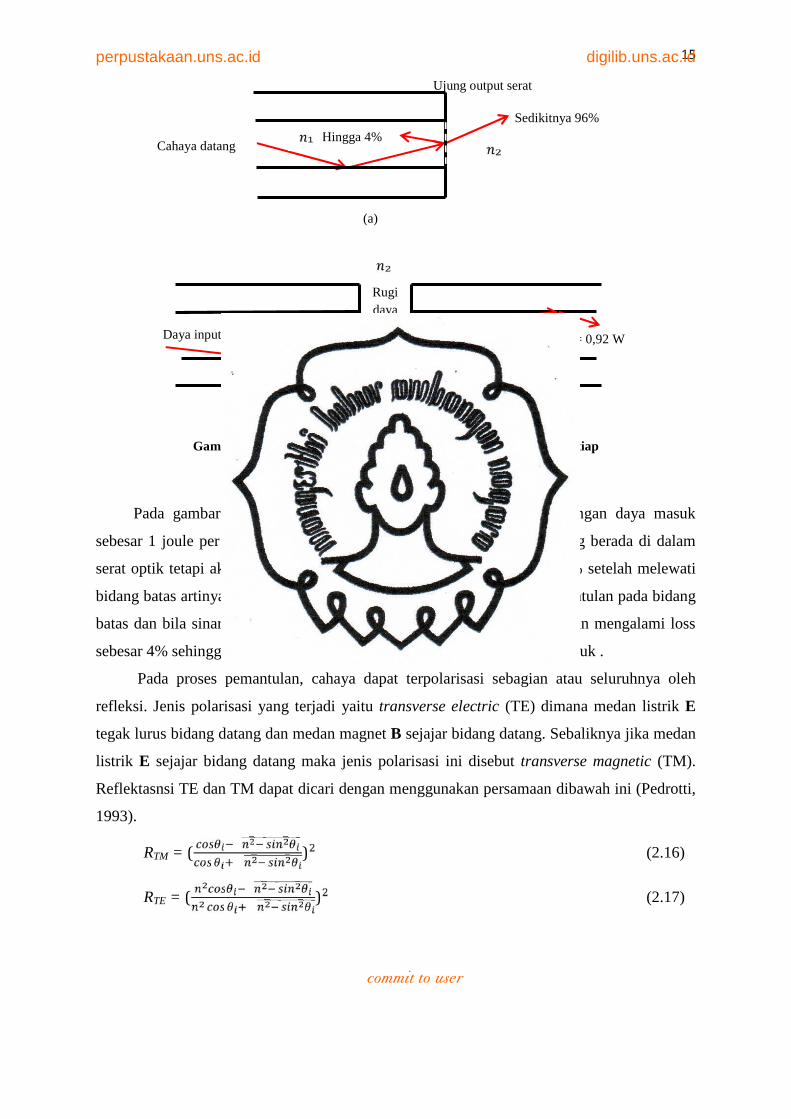
Pada gambar 2.10 dapat dijelaskan bahwa sinar yang datang dengan daya masuk
sebesar 1 joule per detik (Watt) akan mengalami pemantulan Fresnel yang berada di dalam
serat optik tetapi akan mengalami loss atau kehilangan energi sebesar 4% setelah melewati
bidang batas artinya hanya 96 % yang diteruskan karena mengalami pemantulan pada bidang
batas dan bila sinar tersebut masuk kembali pada serat optik lain juga akan mengalami loss
sebesar 4% sehingga sinar yang masuk hanya 92% dari total daya yang masuk .
Pada proses pemantulan, cahaya dapat terpolarisasi sebagian atau seluruhnya oleh
refleksi. Jenis polarisasi yang terjadi yaitu transverse electric (TE) dimana medan listrik E
tegak lurus bidang datang dan medan magnet B sejajar bidang datang. Sebaliknya jika medan
listrik E sejajar bidang datang maka jenis polarisasi ini disebut transverse magnetic (TM).
Reflektasnsi TE dan TM dapat dicari dengan menggunakan persamaan dibawah ini (Pedrotti,
1993).
RTM = ( ) (2.16)
RTE = ( ) (2.17)
Cahaya datang
Sedikitnya 96%
Ujung output serat
Hingga 4%
(a)
Rugidaya4%Daya input = 1 W Daya output = 0,92 W
Daya = 0.96 W
(b)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
16
2.4.6 Pelengkungan (Bending)
Rugi – rugi pembengkokan serat optik adalah hilangnya cahaya (loss) pada saluran
serat optik ketika serat optik mengalami pembengkokan atau lekukan. Di dalam serat optik
terdapat 2 jenis rugi-rugi pembengkokan (bending loss) yaitu pembengkokan mikro
(microbending) dan pembengkokan makro (macrobending). Microbending biasanya
disebabkan karena perbedaan laju pemuaian dan penyusutan antara serat optik dengan lapisan
pelindung luarnya. Jika bagian inti menyusut lebih lambat dari pada lapisan luarnya, maka
bagian inti akan bergeser dari posisi semula sehingga menimbulkan lekukan-lekukan pada
serat optik (Crisp dan Elliot, 2005).
Macrobending adalah pembengkokan serat optik dimana jari-jari bengkokannya lebih
besar dari pada diameter serat optik. Karena terjadi kelengkungan pada serat optik
menyebabkan cahaya yang melewati serat optik akan mengalami pelemahan atenuasi pada
bagian core serat optik, seperti terlihat pada Gambar 2.11.
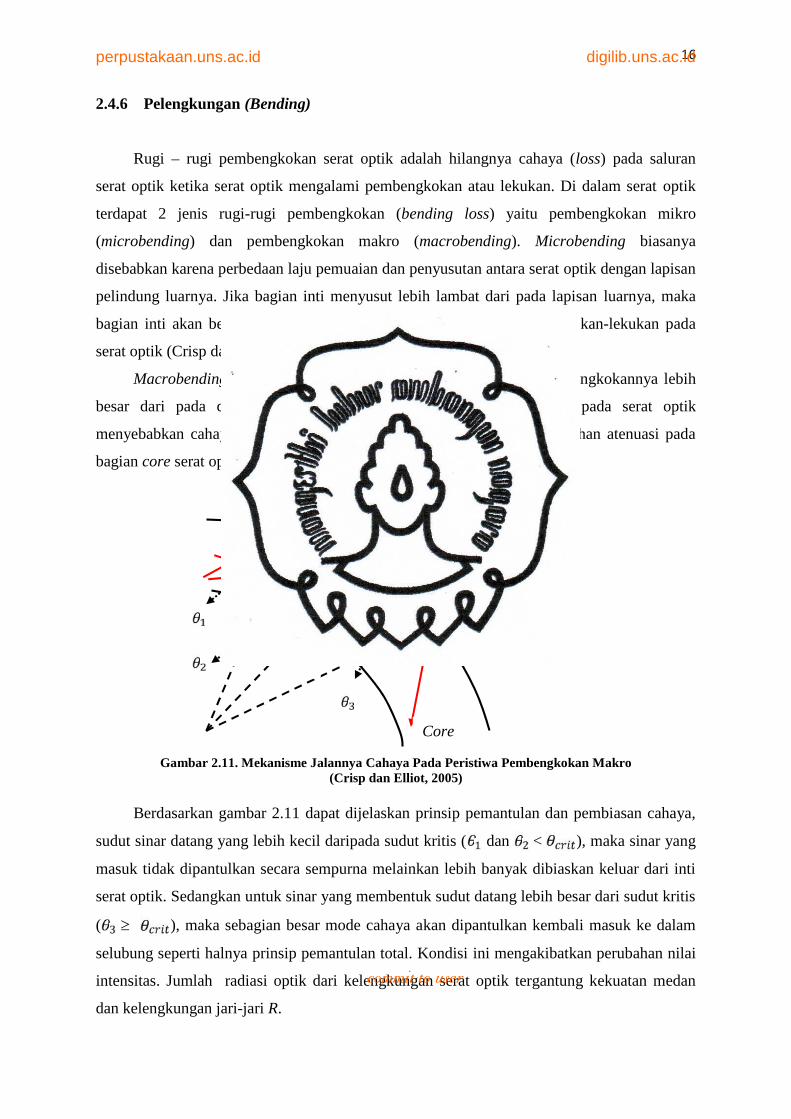
Gambar 2.11. Mekanisme Jalannya Cahaya Pada Peristiwa Pembengkokan Makro(Crisp dan Elliot, 2005)
Berdasarkan gambar 2.11 dapat dijelaskan prinsip pemantulan dan pembiasan cahaya,
sudut sinar datang yang lebih kecil daripada sudut kritis ( dan < ), maka sinar yang
masuk tidak dipantulkan secara sempurna melainkan lebih banyak dibiaskan keluar dari inti
serat optik. Sedangkan untuk sinar yang membentuk sudut datang lebih besar dari sudut kritis
( ), maka sebagian besar mode cahaya akan dipantulkan kembali masuk ke dalam
selubung seperti halnya prinsip pemantulan total. Kondisi ini mengakibatkan perubahan nilai
intensitas. Jumlah radiasi optik dari kelengkungan serat optik tergantung kekuatan medan
dan kelengkungan jari-jari R.
Cladding
Core
R
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
17
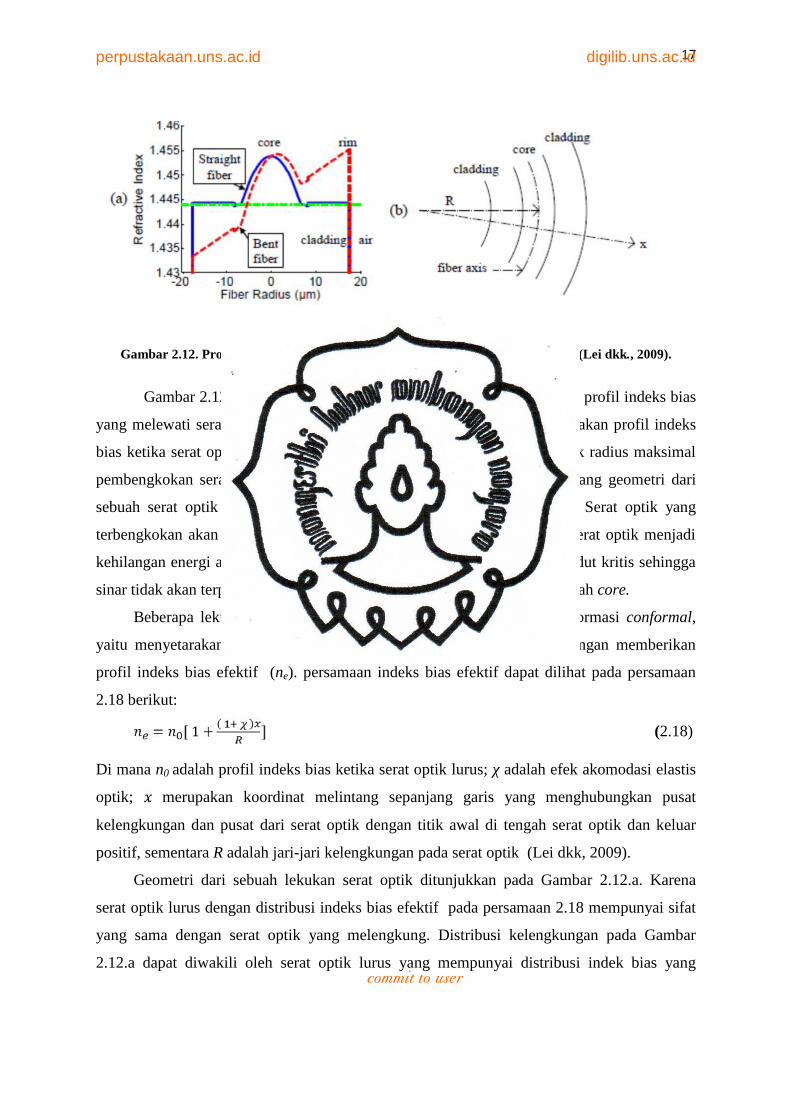
Gambar 2.12. Profil indeks bias (a) dan Geometri serat optik terbengkokkan (b) (Lei dkk., 2009).
Gambar 2.12 (a) dapat dijelaskan bahwa pada garis biru merupakan profil indeks bias
yang melewati serat optik terfabrikasi dan garis merah putus-putus merupakan profil indeks
bias ketika serat optik dibengkokkan di titik kritis dan rim merupakan titik radius maksimal
pembengkokan serat optik. Sedangkan gambar 2.12 (b) menjelaskan tentang geometri dari
sebuah serat optik yang terbengkokkan, x origin pada axis serat optik. Serat optik yang
terbengkokan akan menyebabkan sinar yang berada terkungkung dalam serat optik menjadi
kehilangan energi atau loss dikarenakan sudut datang sianr kurang dari sudut kritis sehingga
sinar tidak akan terpantul atau sinar mengalami pembiasan keluar dari daerah core.
Beberapa lekukan pada serat optik dapat dinyatakan dengan transformasi conformal,
yaitu menyetarakan dengan serat yang lurus dimana pengaruh kelengkungan memberikan
profil indeks bias efektif (ne). persamaan indeks bias efektif dapat dilihat pada persamaan
2.18 berikut: 1 (2.18)
Di mana n0 adalah profil indeks bias ketika serat optik lurus; χ adalah efek akomodasi elastis
optik; merupakan koordinat melintang sepanjang garis yang menghubungkan pusat
kelengkungan dan pusat dari serat optik dengan titik awal di tengah serat optik dan keluar
positif, sementara R adalah jari-jari kelengkungan pada serat optik (Lei dkk, 2009).
Geometri dari sebuah lekukan serat optik ditunjukkan pada Gambar 2.12.a. Karena
serat optik lurus dengan distribusi indeks bias efektif pada persamaan 2.18 mempunyai sifat
yang sama dengan serat optik yang melengkung. Distribusi kelengkungan pada Gambar
2.12.a dapat diwakili oleh serat optik lurus yang mempunyai distribusi indek bias yang
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
18
bervariasi seperti yang diilustrasikan secara skematik pada Gambar 2.11.b (Gambling dkk,
1979).
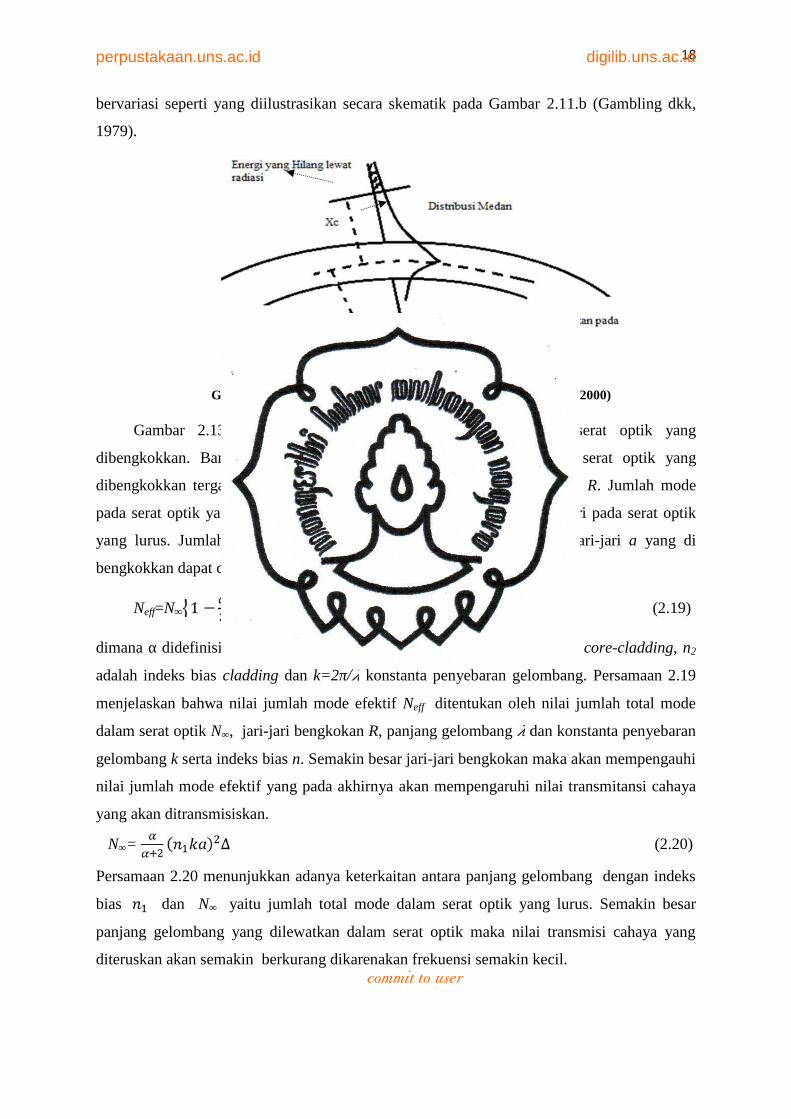
Gambar 2.13. Loss Energi pada Bengkokan Serat Optik (Keiser, 2000)
Gambar 2.13 menunjukkan adanya medan evanescent pada serat optik yang
dibengkokkan. Banyaknya pancaran cahaya yang keluar dari sebuah serat optik yang
dibengkokkan tergantung dari kuat medan di Xc dan jari-jari bengkokan R. Jumlah mode
pada serat optik yang dibengkokkan akan berkurang atau lebih sedikit dari pada serat optik
yang lurus. Jumlah mode efektif Neff pada serat optik multimode berjari-jari a yang di
bengkokkan dapat dilihat pada persamaan 2.19
Neff=N∞ 1 ∆ (2.19)
dimana α didefinisikan perbedaan indeks, ∆ adalah perbedaan indeks bias core-cladding, n2
adalah indeks bias cladding dan k=2π/ konstanta penyebaran gelombang. Persamaan 2.19
menjelaskan bahwa nilai jumlah mode efektif Neff ditentukan oleh nilai jumlah total mode
dalam serat optik N∞, jari-jari bengkokan R, panjang gelombang dan konstanta penyebaran
gelombang k serta indeks bias n. Semakin besar jari-jari bengkokan maka akan mempengauhi
nilai jumlah mode efektif yang pada akhirnya akan mempengaruhi nilai transmitansi cahaya
yang akan ditransmisiskan.
N∞= ∆ (2.20)
Persamaan 2.20 menunjukkan adanya keterkaitan antara panjang gelombang dengan indeks
bias dan N∞ yaitu jumlah total mode dalam serat optik yang lurus. Semakin besar
panjang gelombang yang dilewatkan dalam serat optik maka nilai transmisi cahaya yang
diteruskan akan semakin berkurang dikarenakan frekuensi semakin kecil.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
19
2.5. Kelengkungan dan Jari-Jari Kelengkungan
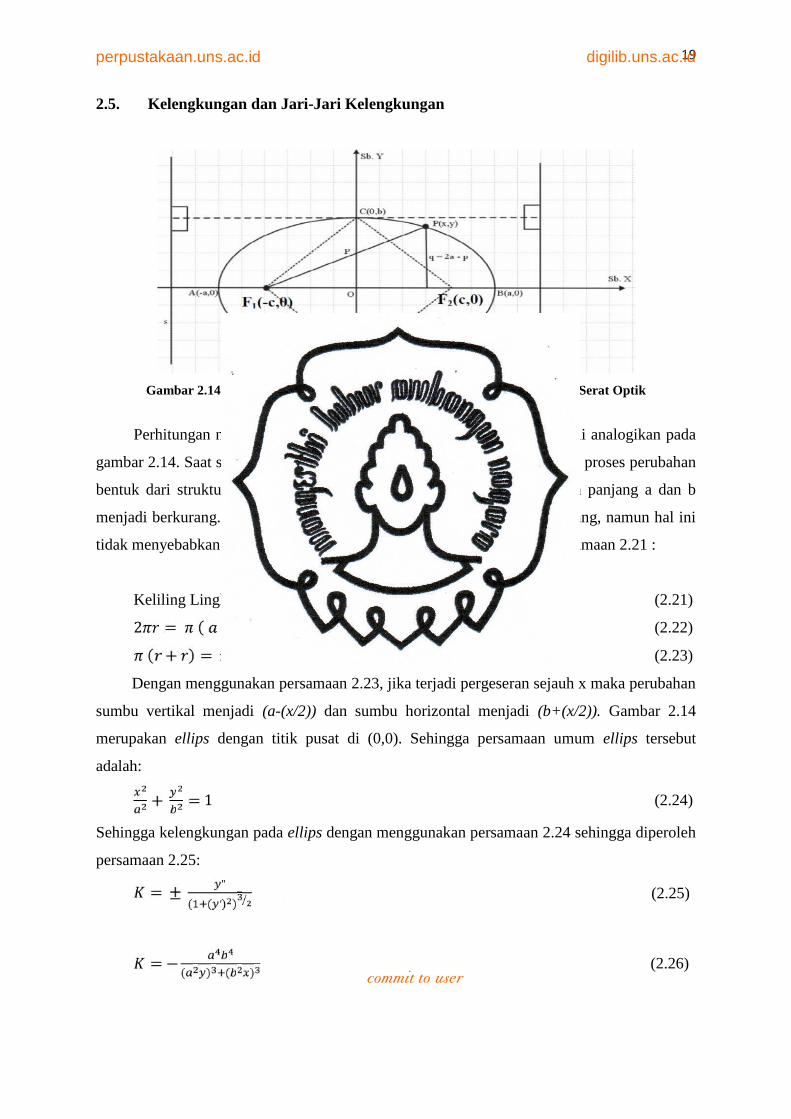
Gambar 2.14. Geometri Ellips Struktur Perubahan Jari-Jari Kelengkungan Serat Optik
Perhitungan nilai rugi-rugi pada serat optik secara melingkar dapat di analogikan pada
gambar 2.14. Saat serat optik mengalami pergeseran maka akan mengalami proses perubahan
bentuk dari struktur lingkaran menjadi ellips. Hal ini akan menyebabkan panjang a dan b
menjadi berkurang. Panjang nilai akan bertambah dan nilai b akan berkurang, namun hal ini
tidak menyebabkan perubahan keliling, seperti yang ditunjukkan pada persamaan 2.21 :
Keliling Lingkaran = Keliling Ellips (2.21)2 (2.22) (2.23)
Dengan menggunakan persamaan 2.23, jika terjadi pergeseran sejauh x maka perubahan
sumbu vertikal menjadi (a-(x/2)) dan sumbu horizontal menjadi (b+(x/2)). Gambar 2.14
merupakan ellips dengan titik pusat di (0,0). Sehingga persamaan umum ellips tersebut
adalah: 1 (2.24)
Sehingga kelengkungan pada ellips dengan menggunakan persamaan 2.24 sehingga diperoleh
persamaan 2.25: "′
(2.26)
(2.25)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
20
Pada Gambar 2.14 tersebut daerah kritis terjadi pada titik A(-a,0) dan B(a,0). maka dapat
diperoleh kelengkungan maksimum (Kmax) di titik (-a,0) dari persamaan 2.24. Yaitu: (2.27)
Setelah diketahui kelengkungan pada daerah kritis maka dapat diperoleh jari-jari
kelengkungannya (R) dengan memasukkan persamaan 2.26 ke persamaan 2.27.
(2.28) (2.29)
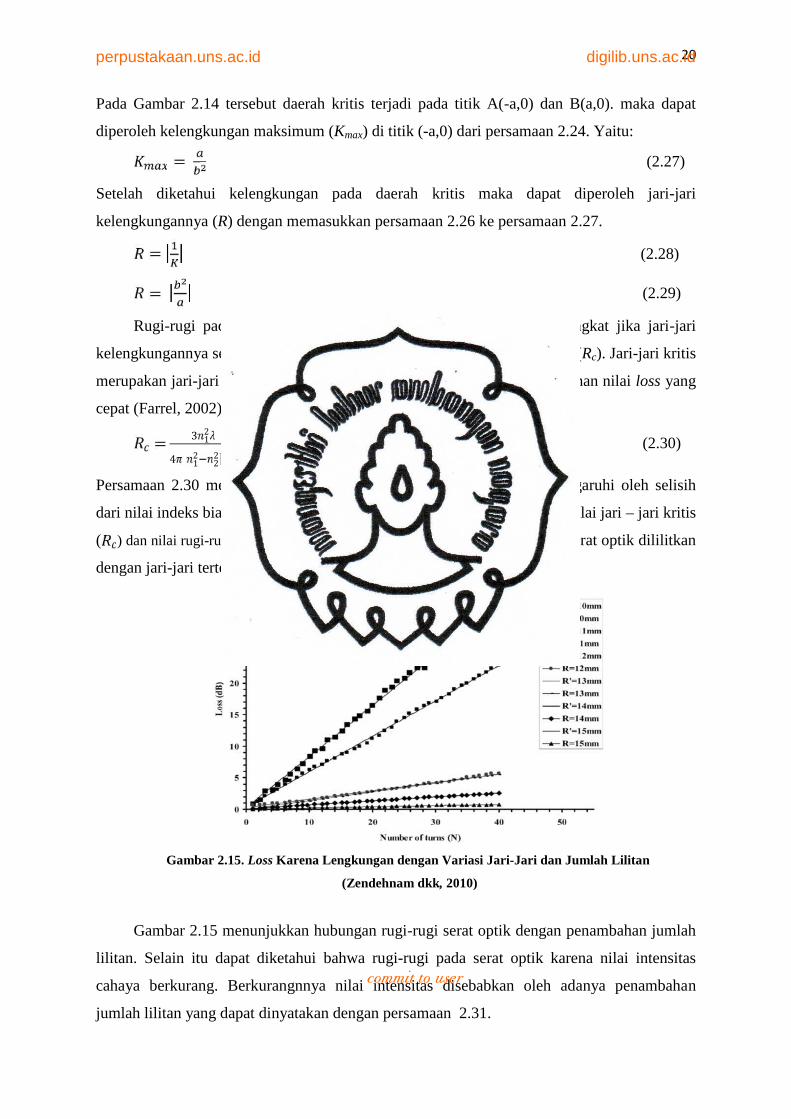
Rugi-rugi pada serat optik yang melengkung akan semakin meningkat jika jari-jari
kelengkungannya semakin kecil. Hal ini dikarenakan adanya jari-jari kritis (Rc). Jari-jari kritis
merupakan jari-jari lengkungan pada serat optik yang mendekati pertambahan nilai loss yang
cepat (Farrel, 2002).3 124 12 22 3 2 (2.30)
Persamaan 2.30 menjelaskan bahwa besarnya jari-jari kritis dapat dipengaruhi oleh selisih
dari nilai indeks bias. Numerical Aperture yang besar akan menghasilkan nilai jari – jari kritis
( ) dan nilai rugi-rugi yang kecil. Loss cahaya juga akan meningkat ketika serat optik dililitkan
dengan jari-jari tertentu sebanyak N lilitan (Gambar 2.15).
Gambar 2.15. Loss Karena Lengkungan dengan Variasi Jari-Jari dan Jumlah Lilitan
(Zendehnam dkk, 2010)
Gambar 2.15 menunjukkan hubungan rugi-rugi serat optik dengan penambahan jumlah
lilitan. Selain itu dapat diketahui bahwa rugi-rugi pada serat optik karena nilai intensitas
cahaya berkurang. Berkurangnnya nilai intensitas disebabkan oleh adanya penambahan
jumlah lilitan yang dapat dinyatakan dengan persamaan 2.31.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
21
= (2.31)
Dengan I in merupakan Intensitas cahaya yang masuk, Iout merupakan Intensitas cahaya
yang keluar, N jumlah Lilitan, koefisien atenuasi dan R adalah radius kelengkungan
(Marzuki, dkk, 2012)
2.6. WIM (Weigh in Motion)
Weigh in motion (WIM) merupakan teknologi pengukuran beban berjalan. (Cheng dkk,
2007) Weigh in Motion telah diperkenalkan lebih dari 50 tahun yang lalu. Prinsip kerja atau
metode teknologi Weigh in Motion adalah mendeteksi suatu berat kendaraan yang bergerak
pada kecepatan tertentu diatas jalan yaitu dengan mengukur beban roda kendaraan pada saat
berjalan. Berbeda dengan metode jembatan timbang, beberapa keuntungan teknologi Weigh
in Motion antara lain lebih efisien dan menghemat waktu, khususnya pada saat lalu lintas
sibuk. Hal ini akan mendukung modernisasi manajemen lalu lintas.
Teknologi Weigh in Motion (WIM) ada beberapa macam sensor yang telah
dikembangkan diantaranya sensor piezoelectric, bending plate, Load cell, capasitive mats dan
serat optik. Beberapa sensor tersebut dapat dijelaskan sebagai berikut :
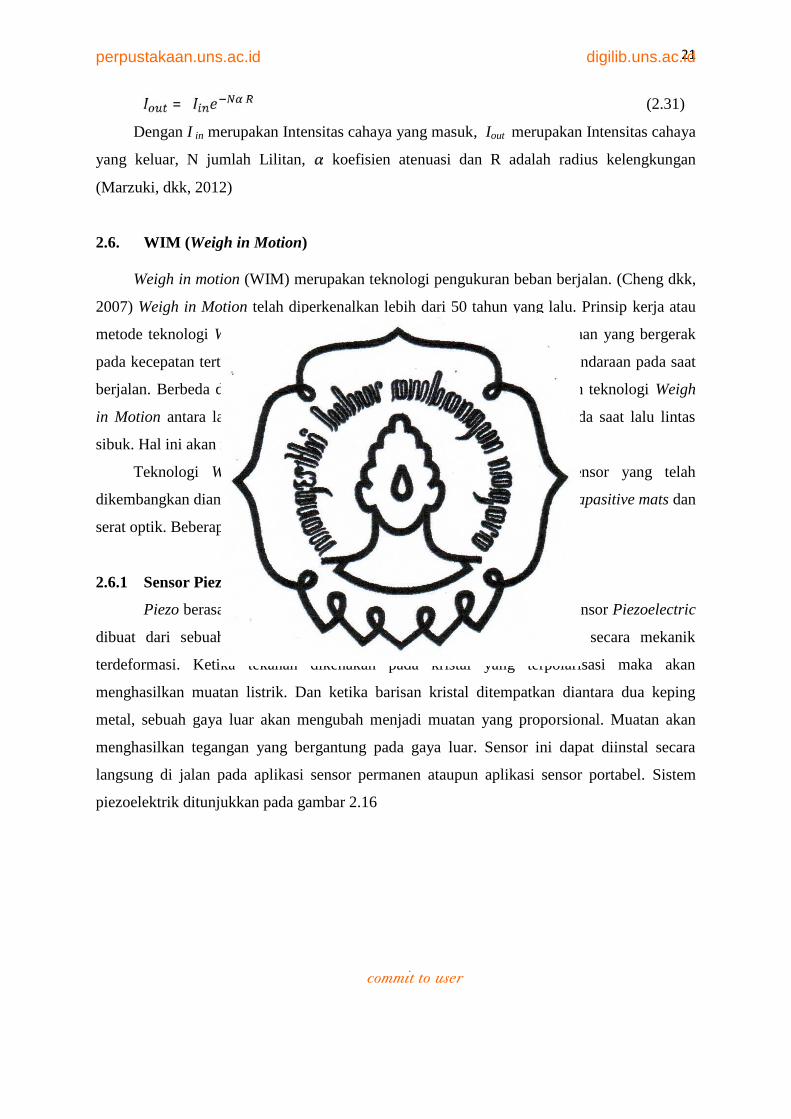
2.6.1 Sensor Piezoelektrik
Piezo berasal dari bahasa Yunani yang artinya saya beri tekanan. Sensor Piezoelectric
dibuat dari sebuah material yang menghasilkan muatan listrik ketika secara mekanik
terdeformasi. Ketika tekanan dikenakan pada kristal yang terpolarisasi maka akan
menghasilkan muatan listrik. Dan ketika barisan kristal ditempatkan diantara dua keping
metal, sebuah gaya luar akan mengubah menjadi muatan yang proporsional. Muatan akan
menghasilkan tegangan yang bergantung pada gaya luar. Sensor ini dapat diinstal secara
langsung di jalan pada aplikasi sensor permanen ataupun aplikasi sensor portabel. Sistem
piezoelektrik ditunjukkan pada gambar 2.16
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
22
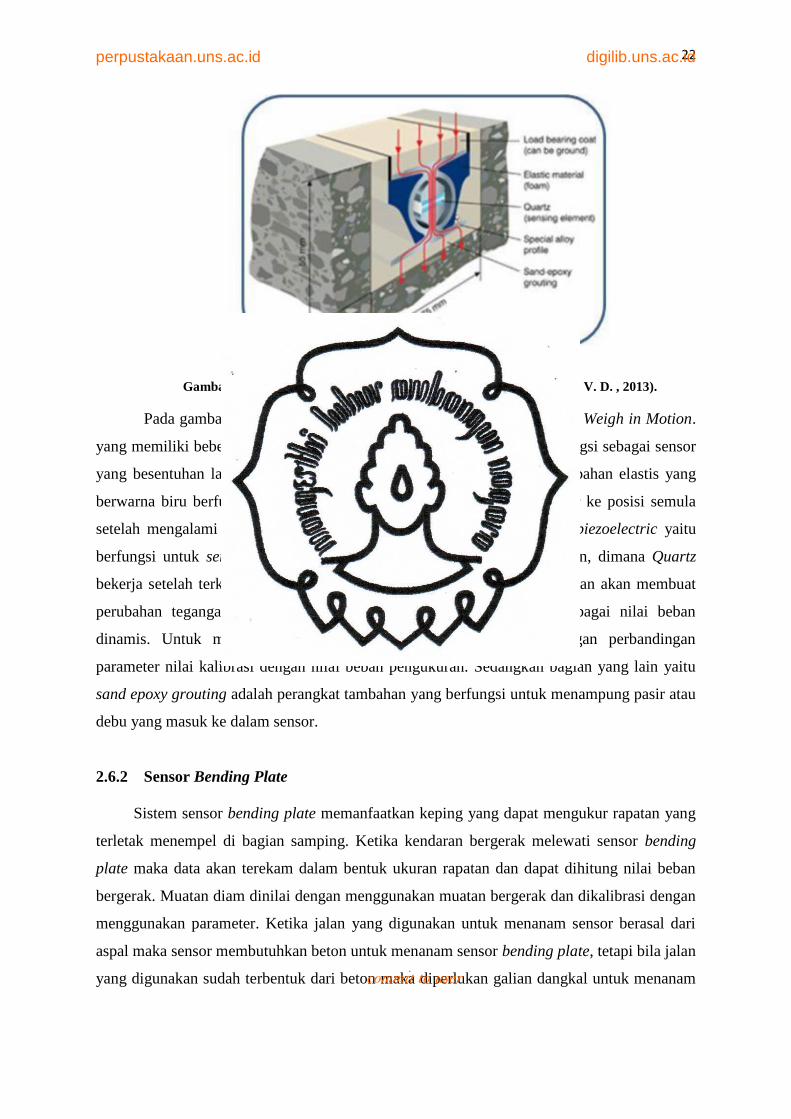
Gambar 2.16 Linear Quartz Piezo Electric Weigh in Motion (Kollipara, V. D. , 2013).
Pada gambar 2.16 ditunjukkan sistem Linear Quartz Piezo Electric Weigh in Motion.
yang memiliki beberapa bagian diantaranya load bearing coat yang berfungsi sebagai sensor
yang besentuhan langsung dengan ban kendaraan. Elastic material atau bahan elastis yang
berwarna biru berfungsi seperti pegas yaitu mengembalikan posisi sensor ke posisi semula
setelah mengalami penekanan. Quartz merupakan bagian utama sensor piezoelectric yaitu
berfungsi untuk sensing element atau berfungsi melakukan penginderaan, dimana Quartz
bekerja setelah terkena tekanan yang disebabkan beban kendaraan. Tekanan akan membuat
perubahan tegangan, perubahan tegangan inilah yang akan dicatat sebagai nilai beban
dinamis. Untuk menghitung nilai beban statis, dilakukan penghitungan perbandingan
parameter nilai kalibrasi dengan nilai beban pengukuran. Sedangkan bagian yang lain yaitu
sand epoxy grouting adalah perangkat tambahan yang berfungsi untuk menampung pasir atau
debu yang masuk ke dalam sensor.
2.6.2 Sensor Bending Plate
Sistem sensor bending plate memanfaatkan keping yang dapat mengukur rapatan yang
terletak menempel di bagian samping. Ketika kendaran bergerak melewati sensor bending
plate maka data akan terekam dalam bentuk ukuran rapatan dan dapat dihitung nilai beban
bergerak. Muatan diam dinilai dengan menggunakan muatan bergerak dan dikalibrasi dengan
menggunakan parameter. Ketika jalan yang digunakan untuk menanam sensor berasal dari
aspal maka sensor membutuhkan beton untuk menanam sensor bending plate, tetapi bila jalan
yang digunakan sudah terbentuk dari beton maka diperlukan galian dangkal untuk menanam
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
23
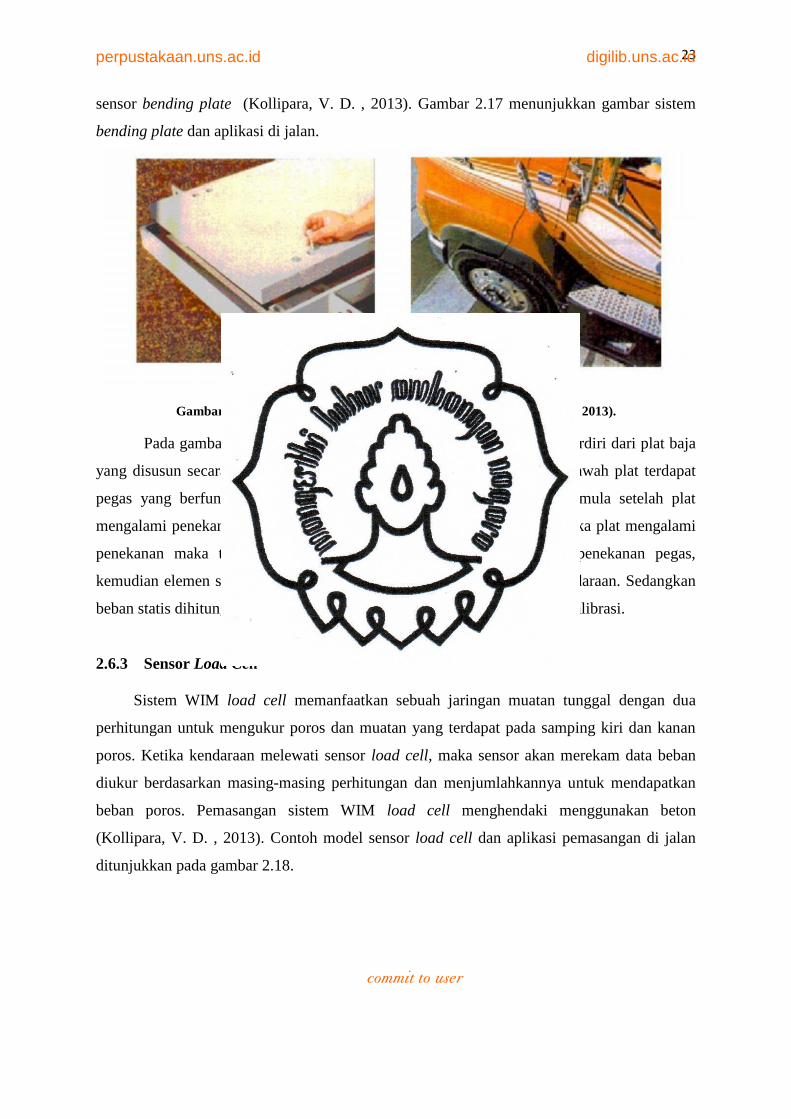
sensor bending plate (Kollipara, V. D. , 2013). Gambar 2.17 menunjukkan gambar sistem
bending plate dan aplikasi di jalan.
Gambar 2.17 Sensor Weigh in Motion Bending Plate (Kollipara, V. D. , 2013).
Pada gambar 2.17 merupakan gambar sensor bending plate yang terdiri dari plat baja
yang disusun secara tegak lurus dengan roda kendaraan. Sedangkan di bawah plat terdapat
pegas yang berfungsi untuk mengembalikan posisi sensor ke posisi semula setelah plat
mengalami penekanan. Prinsip kerja dari sensor bending plate adalah ketika plat mengalami
penekanan maka terjadi perubahan posisi plat yang berimbas pada penekanan pegas,
kemudian elemen sensor akan melakukan pengukuran beban dinamis kendaraan. Sedangkan
beban statis dihitung menggunakan perbandingan dengan nilai parameter kalibrasi.
2.6.3 Sensor Load Cell
Sistem WIM load cell memanfaatkan sebuah jaringan muatan tunggal dengan dua
perhitungan untuk mengukur poros dan muatan yang terdapat pada samping kiri dan kanan
poros. Ketika kendaraan melewati sensor load cell, maka sensor akan merekam data beban
diukur berdasarkan masing-masing perhitungan dan menjumlahkannya untuk mendapatkan
beban poros. Pemasangan sistem WIM load cell menghendaki menggunakan beton
(Kollipara, V. D. , 2013). Contoh model sensor load cell dan aplikasi pemasangan di jalan
ditunjukkan pada gambar 2.18.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
24
(a) (b)
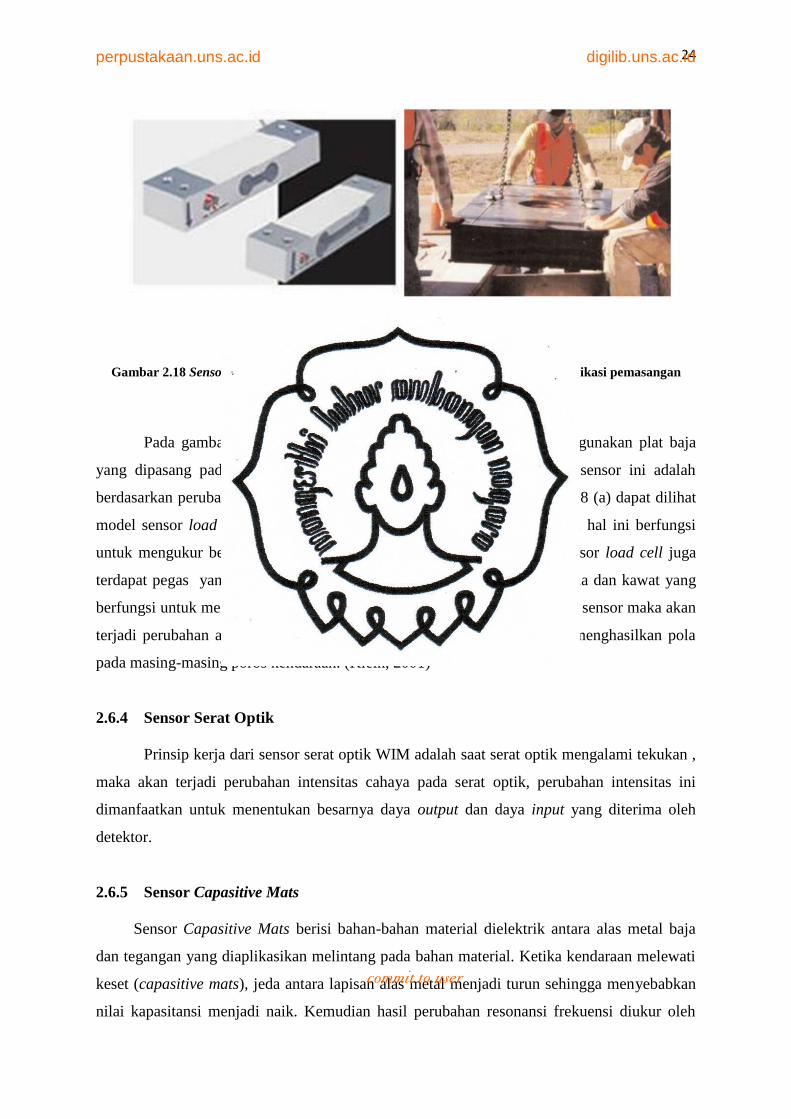
Gambar 2.18 Sensor Single Load Cell (a) model Sensor Single Load Cell dan (b) aplikasi pemasangan
Sensor Single Load Cell. (wimsystem.com)
Pada gambar 2.18 (b) dapat dilihat bahwa sensor load cell menggunakan plat baja
yang dipasang pada area pengukuran di jalan raya. Prinsip kerja dari sensor ini adalah
berdasarkan perubahan tekanan dan perubahan resistansi. Pada gambar 2.18 (a) dapat dilihat
model sensor load cell, ada 2 sensor yang dipasang pada kiri dan kanan, hal ini berfungsi
untuk mengukur beban pada masing-masing poros kendaraan. Dalam sensor load cell juga
terdapat pegas yang berfungsi mengembalikan posisi ke posisi plat semula dan kawat yang
berfungsi untuk mengalirkan arus listrik. Ketika beban kendaraan menekan sensor maka akan
terjadi perubahan arus dan perubahan hambatan yang selanjutnya dapat menghasilkan pola
pada masing-masing poros kendaraan. (Klein, 2001)
2.6.4 Sensor Serat Optik
Prinsip kerja dari sensor serat optik WIM adalah saat serat optik mengalami tekukan ,
maka akan terjadi perubahan intensitas cahaya pada serat optik, perubahan intensitas ini
dimanfaatkan untuk menentukan besarnya daya output dan daya input yang diterima oleh
detektor.
2.6.5 Sensor Capasitive Mats
Sensor Capasitive Mats berisi bahan-bahan material dielektrik antara alas metal baja
dan tegangan yang diaplikasikan melintang pada bahan material. Ketika kendaraan melewati
keset (capasitive mats), jeda antara lapisan alas metal menjadi turun sehingga menyebabkan
nilai kapasitansi menjadi naik. Kemudian hasil perubahan resonansi frekuensi diukur oleh
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
25
sirkuit rangakaian listrik dan dilanjutkan diubah oleh sistem akuisisi data. Sistem ini dapat
diklasifikasikan menjadi permanen dan portabel pada sistem WIM. Sistem sensor capasitive
mats sangat mahal dalam pengaplikasiannya. Akurasi dari sistem capasitive mats tidak terlalu
bagus dalam pengukuran beban poros bila dibandingkan sistem WIM pada load cell ataupun
bending plate. (Kollipara, V. D., 2013). Gambar sistem capasitive mats disajikan dalam
gambar 2.19.
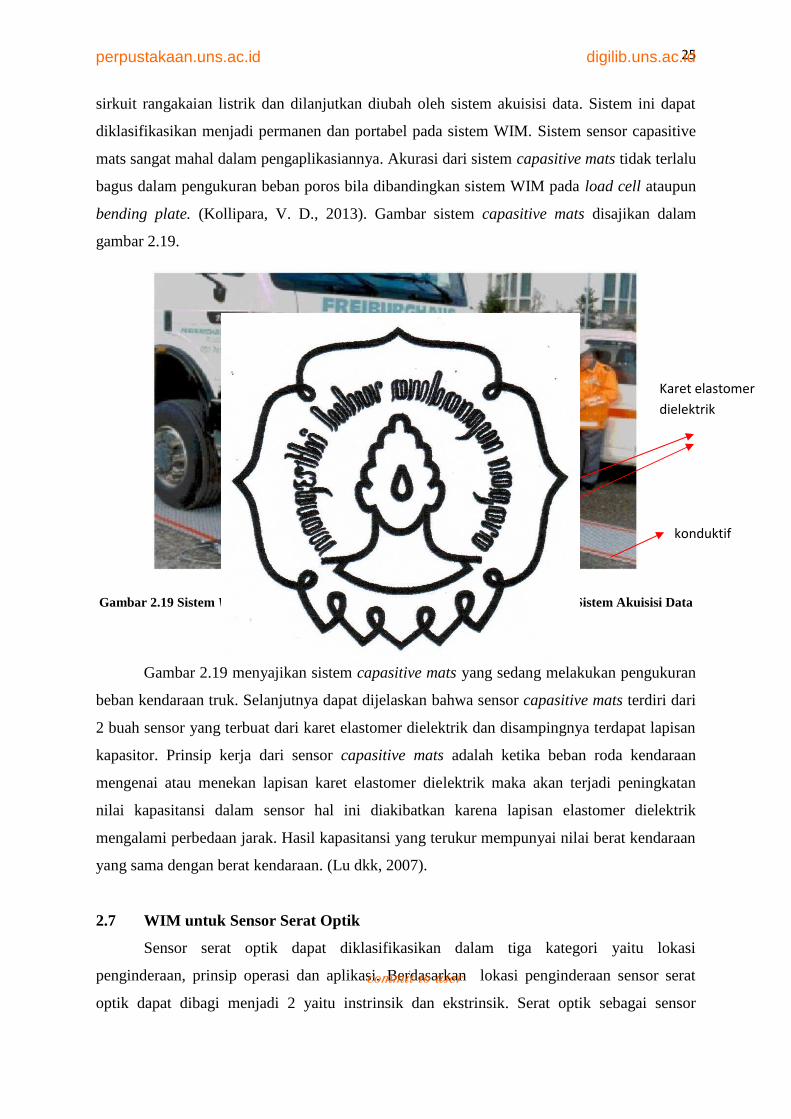
Gambar 2.19 Sistem Weigh in Motion pada Capasitive Mats yang terhubung dengan Sistem Akuisisi Data
(Lu dkk, 2007)
Gambar 2.19 menyajikan sistem capasitive mats yang sedang melakukan pengukuran
beban kendaraan truk. Selanjutnya dapat dijelaskan bahwa sensor capasitive mats terdiri dari
2 buah sensor yang terbuat dari karet elastomer dielektrik dan disampingnya terdapat lapisan
kapasitor. Prinsip kerja dari sensor capasitive mats adalah ketika beban roda kendaraan
mengenai atau menekan lapisan karet elastomer dielektrik maka akan terjadi peningkatan
nilai kapasitansi dalam sensor hal ini diakibatkan karena lapisan elastomer dielektrik
mengalami perbedaan jarak. Hasil kapasitansi yang terukur mempunyai nilai berat kendaraan
yang sama dengan berat kendaraan. (Lu dkk, 2007).
2.7 WIM untuk Sensor Serat Optik
Sensor serat optik dapat diklasifikasikan dalam tiga kategori yaitu lokasi
penginderaan, prinsip operasi dan aplikasi. Berdasarkan lokasi penginderaan sensor serat
optik dapat dibagi menjadi 2 yaitu instrinsik dan ekstrinsik. Serat optik sebagai sensor
Karet elastomerdielektrik
konduktif
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
26
intrinsik terjadi ketika satu atau lebih sifat fisik dari yang dialami serat berubah. Gangguan
yang terjadi menyebabkan perubahan karakteristik cahaya yang telah terjadi di dalam serat
optik. Sedangkan sensor ekstrinsik biasa digunakan untuk dari atau menuju alat optik
eksternal dimana pengukuran diambil. Dalam hal ini, serat optik bekerja jika mendapatkan
cahaya pada daerah pengukuran. Sensor serat optik dapat menjadi ekstrinsik bila modulasi
cahaya dilakukan oleh tranduser eksternal atau dapat menjadi sensor intrinsik bila modulasi
terjadi dalam serat optik.
Berdasarkan prinsip operasi atau modulasi dan proses demodulasi, sensor serat optik
dapat diklasifikasikan menjadi intensitas, phase, frekuensi atau sensor polarisasi. Semua
parameter tersebut dapat menjadi subjek yang menyebabkan perubahan dikarenakan
gangguan eksternal. Sehingga, dengan mendeteksi parameter tersebut dan perubahan yang
terjadi, maka gangguan dari luar dapat diukur. (Fidanboylu dan Efendioğlu, 2009).
Modulasi sumber cahaya adalah proses di mana informasi dicetak ke dalam sumber
cahaya yang disebut carrier untuk transmisi yang efisien. Efek lingkungan seperti suhu,
tekanan, regangan, dan lain sebagainya dapat dikonversi ke dalam sinyal listrik kemudian
dimodulasi lalu diinterpretasikan. Hal ini memungkinkan terdapat banyak jenis sensor yang
dapat mengukur efek lingkungan yang sama. Pemilihan metode yang tepat dengan rancangan
sensor yang cocok sangat penting dilakukan sehingga hanya efek lingkungan yang diinginkan
yang akan terdeteksi dan diukur (Yeh, 1990).
2.7.1 Sensor serat optik modulasi intensitas
Sensor serat optik modulasi intensitas menggunakan perubahan intensitas atau attenuasi
(pelemahan) sebagai dasar utama kerja sensor serat optik. Cara untuk melakukan attenuasi
yaitu dengan menggunakan bending pada serat optik sehingga terjadi rugi daya di dalam serat
optik yang menyebabkan attenuasi pada sinyal keluaran di ujung serat optik. Beberapa
konsep sensor berbasis modulasi intensitas adalah macrobending, transmisi, dan refleksi.
Sensor modulasi intensitas lebih sederhana dan tidak banyak memerlukan interface (Yeh,
1990). Salah satu yang dikembangkan dari sensor serat optik adalah sensor macrobending.
Sistem macrobending memanfaatkan daya yang hilang dalam serat optik yang dibengkokkan
sebagai sinyal dimana besarnya dipengaruhi oleh jari-jari pembengkokan. Ketika loop
menyentuh permukaan uji maka akan terjadi kecacatan serat optik dan merubah diameter
pembengkokan (Domanski,2010).
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
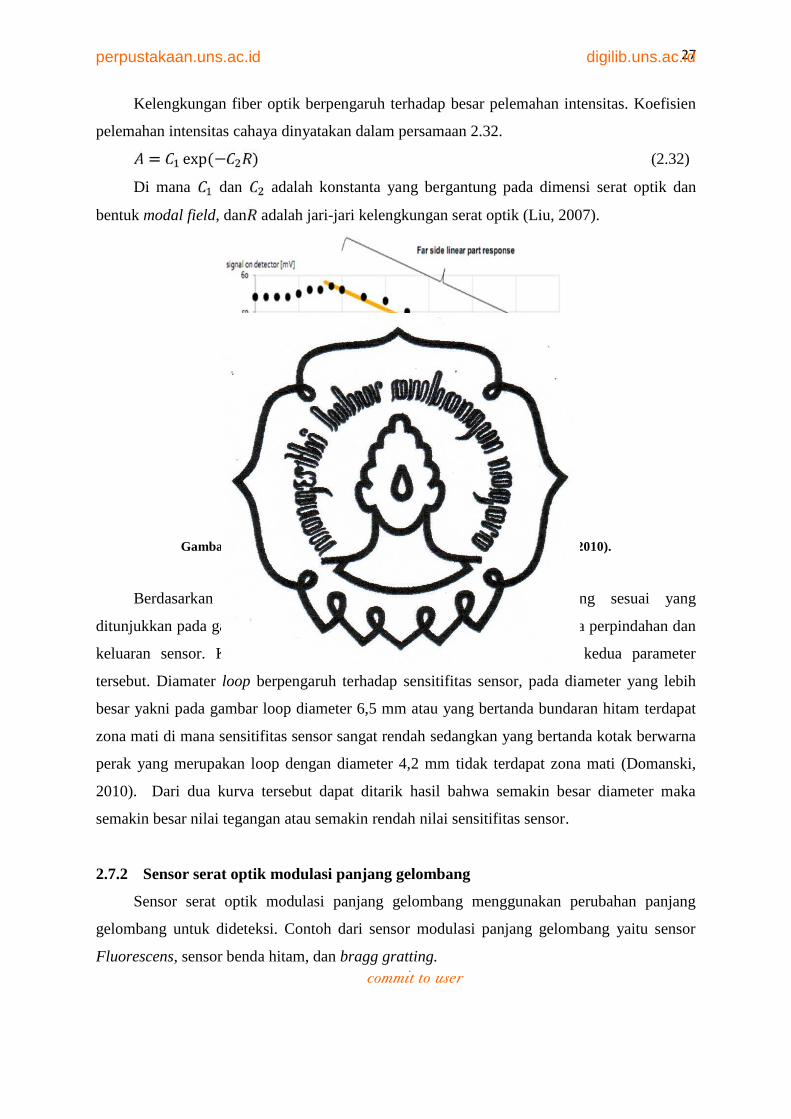
27
Kelengkungan fiber optik berpengaruh terhadap besar pelemahan intensitas. Koefisien
pelemahan intensitas cahaya dinyatakan dalam persamaan 2.32.exp (2.32)
Di mana dan adalah konstanta yang bergantung pada dimensi serat optik dan
bentuk modal field, dan adalah jari-jari kelengkungan serat optik (Liu, 2007).
Gambar 2.20. Kurva Karakteristik Sistem Macrobending (Domanski, 2010).
Berdasarkan hasil penelitian karakteristik sistem macrobending sesuai yang
ditunjukkan pada gambar 2.20 didapatkan sebuah kurva karakteristik antara perpindahan dan
keluaran sensor. Kurva menunjukkan adanya hubungan linier antara kedua parameter
tersebut. Diamater loop berpengaruh terhadap sensitifitas sensor, pada diameter yang lebih
besar yakni pada gambar loop diameter 6,5 mm atau yang bertanda bundaran hitam terdapat
zona mati di mana sensitifitas sensor sangat rendah sedangkan yang bertanda kotak berwarna
perak yang merupakan loop dengan diameter 4,2 mm tidak terdapat zona mati (Domanski,
2010). Dari dua kurva tersebut dapat ditarik hasil bahwa semakin besar diameter maka
semakin besar nilai tegangan atau semakin rendah nilai sensitifitas sensor.
2.7.2 Sensor serat optik modulasi panjang gelombang
Sensor serat optik modulasi panjang gelombang menggunakan perubahan panjang
gelombang untuk dideteksi. Contoh dari sensor modulasi panjang gelombang yaitu sensor
Fluorescens, sensor benda hitam, dan bragg gratting.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
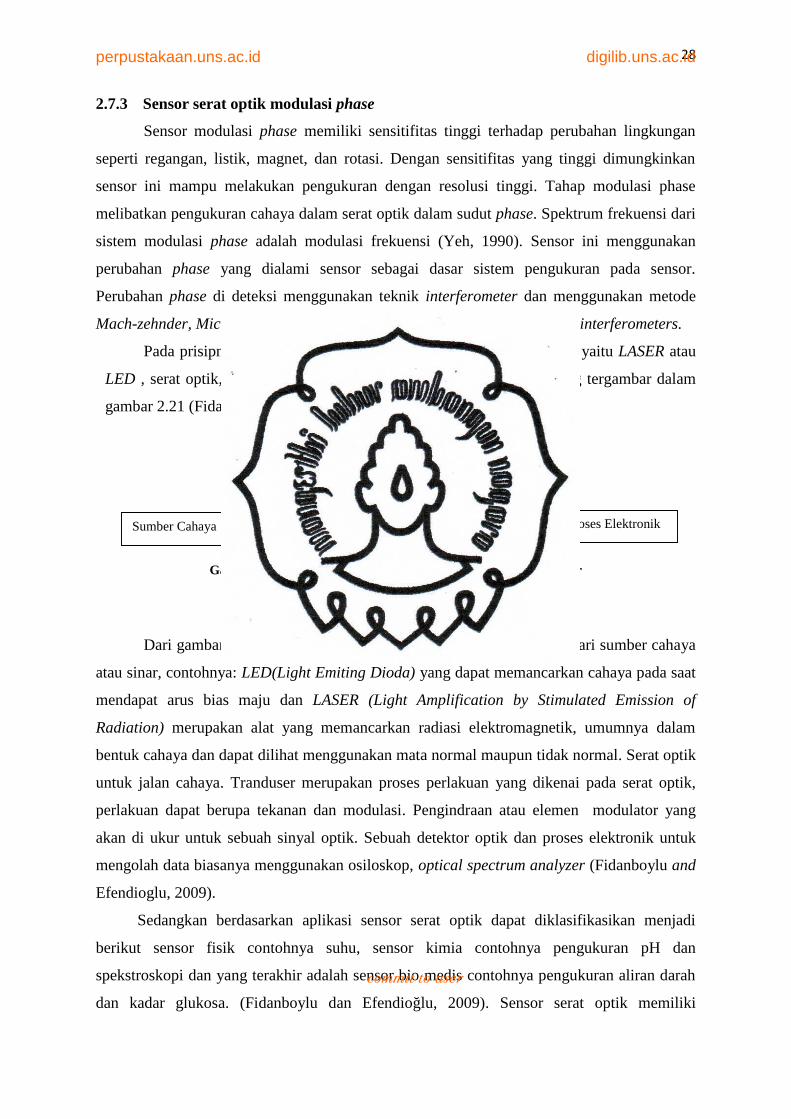
28
2.7.3 Sensor serat optik modulasi phase
Sensor modulasi phase memiliki sensitifitas tinggi terhadap perubahan lingkungan
seperti regangan, listik, magnet, dan rotasi. Dengan sensitifitas yang tinggi dimungkinkan
sensor ini mampu melakukan pengukuran dengan resolusi tinggi. Tahap modulasi phase
melibatkan pengukuran cahaya dalam serat optik dalam sudut phase. Spektrum frekuensi dari
sistem modulasi phase adalah modulasi frekuensi (Yeh, 1990). Sensor ini menggunakan
perubahan phase yang dialami sensor sebagai dasar sistem pengukuran pada sensor.
Perubahan phase di deteksi menggunakan teknik interferometer dan menggunakan metode
Mach-zehnder, Micholson, Fabry-perot, Sagnac, Polarimetric, dan grating interferometers.
Pada prisipnya sensor serat optik hanya terdiri dari sumber cahaya yaitu LASER atau
LED , serat optik, tranducer, detektor dan proses elektronik seperti yang tergambar dalam
gambar 2.21 (Fidanboylu dan Efendioğlu, 2009).
Gambar 2.21. Struktur Umum Sebuah Sistem Serat Optik Sensor
(Fidanboylu and Efendioglu, 2009).
Dari gambar 2.21 Struktur umum sistem serat optik sensor terdiri dari sumber cahaya
atau sinar, contohnya: LED(Light Emiting Dioda) yang dapat memancarkan cahaya pada saat
mendapat arus bias maju dan LASER (Light Amplification by Stimulated Emission of
Radiation) merupakan alat yang memancarkan radiasi elektromagnetik, umumnya dalam
bentuk cahaya dan dapat dilihat menggunakan mata normal maupun tidak normal. Serat optik
untuk jalan cahaya. Tranduser merupakan proses perlakuan yang dikenai pada serat optik,
perlakuan dapat berupa tekanan dan modulasi. Pengindraan atau elemen modulator yang
akan di ukur untuk sebuah sinyal optik. Sebuah detektor optik dan proses elektronik untuk
mengolah data biasanya menggunakan osiloskop, optical spectrum analyzer (Fidanboylu and
Efendioglu, 2009).
Sedangkan berdasarkan aplikasi sensor serat optik dapat diklasifikasikan menjadi
berikut sensor fisik contohnya suhu, sensor kimia contohnya pengukuran pH dan
spekstroskopi dan yang terakhir adalah sensor bio medis contohnya pengukuran aliran darah
dan kadar glukosa. (Fidanboylu dan Efendioğlu, 2009). Sensor serat optik memiliki
Sumber Cahaya Transducer Detektor Proses Elektronik
Pengukuran
Serat Optik Serat Optik
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
29
keuntungan dimensi kecil, resolusi dan akurasi yang baik, serta sangat baik mengirimkan
sinyal pada jarak yang panjang. Selain itu juga tahan terhadap medan elektromagnet serta
interferensi radio. (Lu dan Cai, 2007)
2.8. Sistem Akuisisi Data
Akuisisi data adalah proses dimana fenomena fisis dari dunia nyata ditransformasikan
ke dalam sinyal listrik yang diukur dan diubah kedalam format digital untuk pemprosesan,
analisis dan penyimpanan oleh komputer. Elemen dasar sistem akuisisi data terdiri atas
sensor dan transduser, pengkondisi sinyal, perangkat keras akusisi data, personal komputer
serta perangkat lunak akuisisi data (Park dan Mackay, 2003).
Sensor dan transduser adalah penghubung antara dunia nyata dengan sistem akuisisi
data dengan mengubah fenomena fisis menjadi sinyal listrik yang dapat diterima oleh
perangkat keras. Sensor dan transduser memberikan input listrik pada perangkat keras untuk
diolah lebih lanjut (Park dan Mackay, 2003).
Sinyal listrik dari transduser sering kali perlu diubah ke dalam bentuk yang bisa
diterima oleh perangkat keras sistem akuisisi data. pengkondisi sinyal mempunyai banyak
peran antara lain adalah filtering, penguatan, linierisasi, isolasi dan eksitasi. Pada penelitian
ini pengkondisi sinyal yang berperan dalam proses penguatan. Penguatan dilakukan supaya
data-data yang bernilai rendah dapat terbaca oleh perangkat keras sistem akuisisi data (Park
dan Mackay, 2003).
Perangkat keras sistem akuisisi data didefinisikan sebagai komponen pelengkap sistem
akuisisi data yang mempunyai fungsi sebagai input, pemprosesan dan mengubah ke dalam
format digital, dengan menggunakan ADC data sinyal analog dari sebuah sistem atau proses
kemudian diubah ke dalam format digital dan dikirim ke personal komputer untuk
ditampilkan, penyimpanan dan analisis. Perangkat keras juga digunakan sebagai input sinyal
digital yang berisi informasi dari sebuah sistem atau proses. Selain digunakan untuk
mengubah sinyal analog menjadi sinyal digital, perangkat keras juga dapat digunakan dalam
proses sebaliknya yaitu mengubah sinyal digital menjadi analog. Hal ini berguna saat
perangkat keras digunakan untuk mengontrol sistem atau proses. Fungsi lain selain sebagai
input, perangkat keras juga dapat digunakan untuk output sinyal digital.
Perangkat keras pada sistem akuisisi data tidak akan dapat bekerja tanpa menggunakan
perangkat lunak. Perangkat lunak berjalan pada sebuah komputer di bawah sistem operasi
yang mungkin single-tasking (contoh DOS) atau multi-tasking (contohnya Windows, Unix,
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
30
OS2) yang mengijinkan perangkat lunak dapat berjalan secara simultan. Namun hal yang
sangat penting dari sistem akuisisi data adalah personal komputer. Personal komputer
memiliki peran yang dalam input-Output (I/O) pada perangkat lunak maupun perangkat keras
yang semuanya bekerja secara berkesinambungan (Park dan Mackay, 2003)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
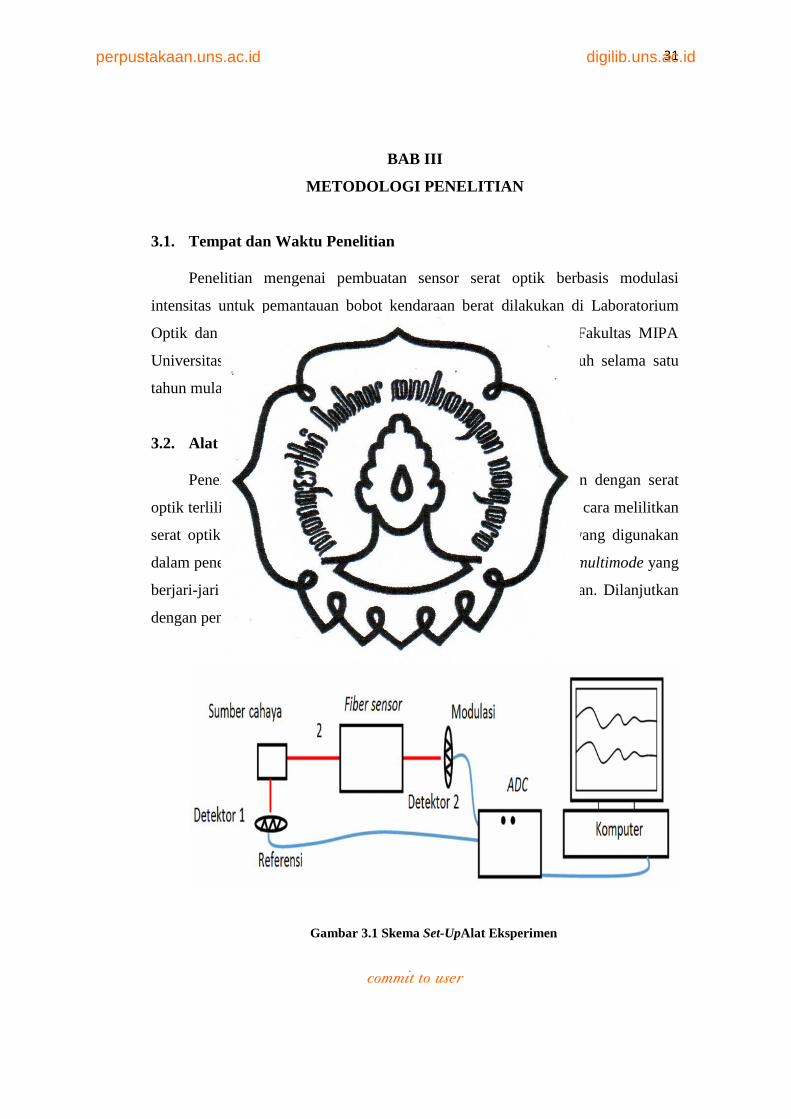
31
BAB III
METODOLOGI PENELITIAN
3.1. Tempat dan Waktu Penelitian
Penelitian mengenai pembuatan sensor serat optik berbasis modulasi
intensitas untuk pemantauan bobot kendaraan berat dilakukan di Laboratorium
Optik dan Fotonik serta Laboratorium Bengkel Jurusan Fisika Fakultas MIPA
Universitas Sebelas Maret.Waktu pelaksanaan penelitian ditempuh selama satu
tahun mulai dari bulan Agustus 2013 sampai Agustus 2014.
3.2. Alat dan Bahan yang Digunakan
Penelitian ini dilakukan menggunakan metode eksperimen dengan serat
optik terlilit. Metode ini merupakan metode makrobending dengan cara melilitkan
serat optik sedemikian hingga terbentuk gulungan. Serat optik yang digunakan
dalam penelitian ini adalah Polimer Optic Fiber (POF) jenis kaca multimode yang
berjari-jari 0,5 mm. Jumlah lilitan yang digunakan yaitu 1-4 lilitan. Dilanjutkan
dengan penelitian skala laboratorium.
Gambar 3.1 Skema Set-UpAlat Eksperimen
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
32
Skema set-up alat yang digunakan pada eksperimen ini ditunjukkan pada
gambar 3.1. adalah skema dengan atenuator. Atenuator diletakkan pada lengan
acuan. Tujuan dari penggunaan atenuator adalah untuk membandingkan dan
memposisikan serat optik yang digunakan pada sistem bending selalu mulai dalam
kondisi transmitansi bernilai 1.
Dari gambar 3.1 dapat dijelaskan bahwa cahaya dari LED dipecah menjadi
2. Cahaya yang pertama masuk ke serat optik yang telah dimodulasi, kemudian
cahaya keluarannya ditangkap oleh detektor 2. Hasil yang diperoleh pada detektor
2 adalah intensitas modulasi. Cahaya yang kedua masuk ke serat optik tanpa
modulasi. Cahaya yang ditangkap detektor 1 adalah intensitas referensi. Foto
detektor melakukan scanning pada masing-masing lengan detektor guna
mengamati perubahan intensitas yang terjadi. Intensitas cahaya akan dikonversi
menjadi tegangan oleh alat interface yang akan ditampilkan pada personal
computer. Software yang digunakan adalah labview dengan alat interface Arduino
Uno. Dalam pembuatan perangkat sensor optik berbasis komputer ini alat dan
bahan yang diperlukan adalah sebagai berikut :
3.2.1. Alat yang Digunakan
Alat yang digunakan dalam penelitian ini antara lain:
a. LED (Light Emiting Diode) berfungsi sebagai sumber cahaya. LED yang
digunakan adalah jenis High Power LED dengan warna cahaya LED yaitu
putih jenis polikromatik dimana sumber daya yang digunakan berupa adaptor
dengan tegangan yang digunakan untuk LED sebesar 5 V. Adaptor dipilih
karena mempunyai keluaran tegangan yang stabil sehingga tidak merubah
intensitas keluaran dari sumber cahaya.
b. Netbook yang dilengkapi dengan software akuisisi data Labview yang
terhubung dengan alat interface Arduino Uno,akuisisi data yang digunakan
untuk membaca data atau mencatat output sinar dari serat optik.
c. Micropositioner
Micropositioner digunakan sebagai alat pengatur posisi ujung serat optik.
Dengan menggunakan micropositioner, ujung serat optik dapat diatur
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
33
posisinya sehingga berkas cahaya yang masuk menuju ujung serat optik
(lengan 1 dan lengan 2) dapat diposisikan pada kedudukan yang tepat
sehingga diperoleh intensitas cahaya yang masuk tinggi.
d. LDR (Light DependenResistor) digunakan sebagai sensor untuk menangkap
cahaya yang keluar dari serat optik. LDR sendiri merupakan jenis resistor
yang merespon perubahan intensitas cahaya yang mengenainya. Semakin
tinggi intensitas cahaya yang masuk ke LDR, maka semakin kecil
hambatannya. LDR dipilih sebagai detektor karena mempunyai daerah kerja
yang sesuai dengan panjang gelombang sumber cahaya yang digunakan Light
Emiting Diode (LED).
e. Mikrometer Sekrup digunakan untuk melakukan variasi tekanan pada bahan
rubber. Guna mengetahui besarnya pembekokan yang diberikan pada serat
optik.
f. Alat Interface Arduino Uno berguna sebagai alat inteface untuk mengubah
data analog menjadi digital dari LDR.
g. Adaptor
Adaptor sebagai sumber tegangan pada light source. Adaptor dipilih karena
mempunyai keluaran tegangan yang stabil, sehingga intensitas cahaya yang
dihasilkan oleh light source juga stabil.
h. Multimeter
Multimeter digunakan untuk mengukur besar tegangan yang masuk pada
pembangkit getaran. Multimeter yang digunakan merupakan jenis multimeter
analog.
3.2.2. Bahan yang Digunakan
Bahan yang digunakan dalam penelitian ini antara lain:
a. Serat Optik yang digunakan dalam penelitian ini adalah serat optik berbahan
polimer dengan jenis multimode type INFICOR 300 dari halance China
dengan diameter 0,5 mm yang berfungsi sebagai waveguaide. Artinya serat
optik dapat mentransmisikan gelombang dari satu titik ke titik lain dimana
medan gelombang terkurung. Serat optik polimer dipilih karena mampu
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
34
mentransmisikan cahaya dalam jumlah besar sehingga cahaya pantulan dapat
terdeteksi.
b. Silicon Rubber RTV 683 buatan PT. Brataco Indonesia yang berfungsi
sebagai bending. Silicon Rubber digunakan sebagai media pelindung serat
optik dari penggunaan beban kendaraan dan sistem pegas pada serat optik
agar dapat kembali ke posisi semula setelah mengalami pendistribusian
beban.
c. Hardener 683 PT. Brataco Indonesia. digunakan sebagai katalis untuk Silicon
Rubber RTV 683
d. Resin Brataco merupakan cairan kimia cair yang digunakan untuk
pembentukan cetakan karet elastomer. Cetakan berfungsin untuk membentuk
karet elastomer yang merupakan bahan nutama dalam sensor serat serat optik
berbasis aplikasi Weigh in Motion.
e. Hardener Resin berguna untuk katalis resin.
3.2.3. Software Penunjang
a. Labview
Labview (Laboratory Virtual Instrumentation Engineering Workbench)
merupakan sofware penunjang untuk proses akuisisi data, pengolahan data
dan menampilkan data. Akuisisi data yang dimaksudkan adalah pengambilan
data dari Interface menuju komputer untuk diolah, sehingga dengan mudah
langsung dapat diperoleh serta diolah di dalam netbook.
b. Microsoft Excel
Microsoft Excel digunakan untuk menyimpan data yang didapatkan dari
labview. Data disimpan dalam format xls yang merupakan format yang
digunakan untuk microsoft Excel 1997-2003. Semua grafik yang diperoleh
dari pengambilan data dalam program Labview dapat di export ke dalam
format excel sehingga lebih mudah untuk disimpan dan diolah lebih lanjut.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
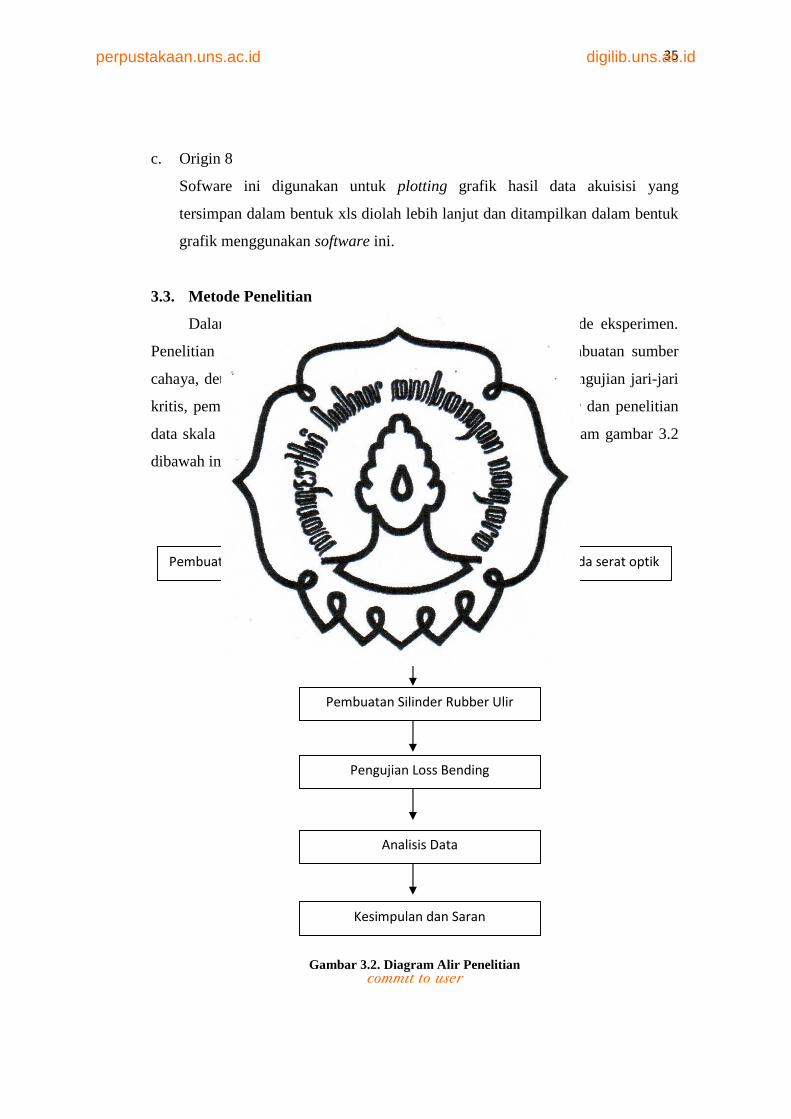
35
c. Origin 8
Sofware ini digunakan untuk plotting grafik hasil data akuisisi yang
tersimpan dalam bentuk xls diolah lebih lanjut dan ditampilkan dalam bentuk
grafik menggunakan software ini.
3.3. Metode Penelitian
Dalam penelitian ini metode yang digunakan adalah metode eksperimen.
Penelitian dapat dipisahkan menjadi berbagai tahapan yaitu pembuatan sumber
cahaya, detektor dan sistem transmisi cahaya pada serat optik, pengujian jari-jari
kritis, pembuatan silinder Rubber Berulir, pengujian loss bending dan penelitian
data skala laboratorium. Untuk lebih lengkapnya dapat dilihat dalam gambar 3.2
dibawah ini.
Gambar 3.2. Diagram Alir Penelitian
Persiapan Alat dan Bahan
Uji Jari-jari Kritis
Pembuatan Silinder Rubber Ulir
Pengujian Loss Bending
Analisis Data
Kesimpulan dan Saran
Pembuatan sumber cahaya, detektor dan sistem transmisi cahaya pada serat optik
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
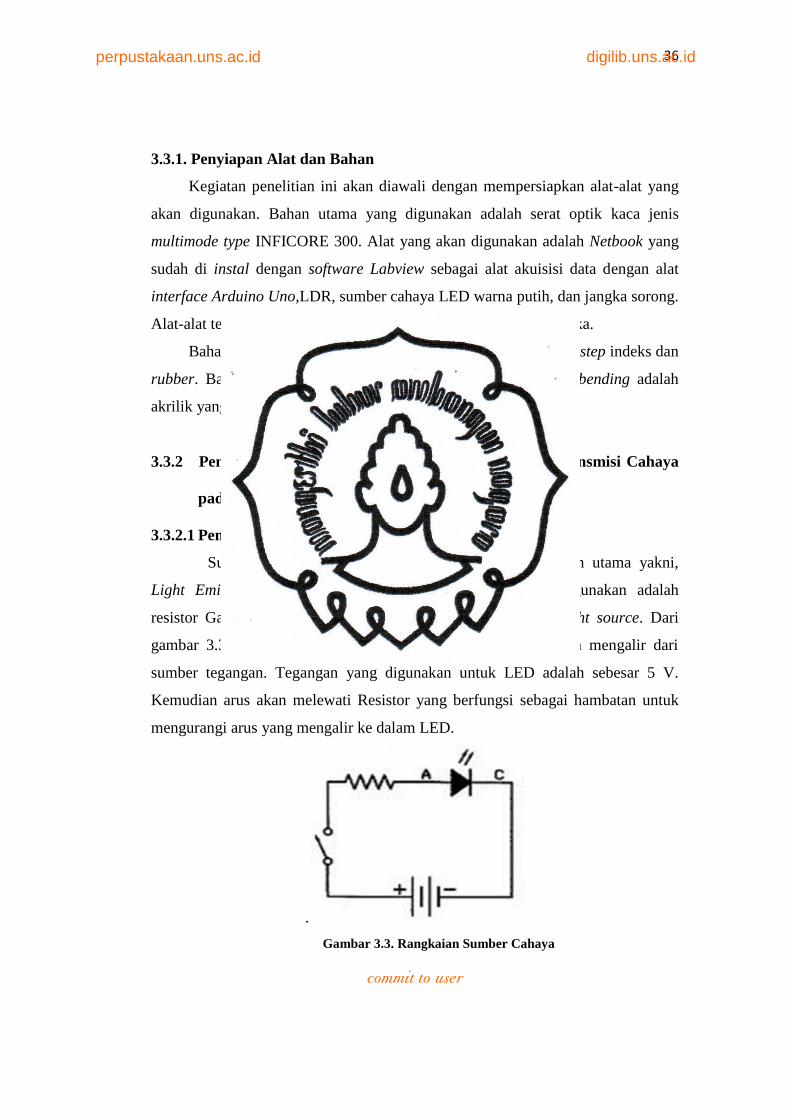
36
3.3.1. Penyiapan Alat dan Bahan
Kegiatan penelitian ini akan diawali dengan mempersiapkan alat-alat yang
akan digunakan. Bahan utama yang digunakan adalah serat optik kaca jenis
multimode type INFICORE 300. Alat yang akan digunakan adalah Netbook yang
sudah di instal dengan software Labview sebagai alat akuisisi data dengan alat
interface Arduino Uno,LDR, sumber cahaya LED warna putih, dan jangka sorong.
Alat-alat tersebut sudah tersedia di laboratorium optik jurusan Fisika.
Bahan yang akandigunakan ialah serat optic kaca multimode step indeks dan
rubber. Bahan yang digunakan untuk membuat set up alat uji bending adalah
akrilik yang digunakan untuk mengamati pergeseran.
3.3.2 Pembuatan Sumber Cahaya, Detektor dan Sistem Transmisi Cahaya
pada Serat Optik
3.3.2.1 Pembuatan Sumber Cahaya
Sumber cahaya dibuat dengan menggunakan komponen utama yakni,
Light Emitting Diode (LED). Komponen tambahan yang digunakan adalah
resistor Gambar 3.3 merupakan rangkaian untuk pembuatan light source. Dari
gambar 3.3 dapat dijelaskan ketika saklar dinyalakan arus akan mengalir dari
sumber tegangan. Tegangan yang digunakan untuk LED adalah sebesar 5 V.
Kemudian arus akan melewati Resistor yang berfungsi sebagai hambatan untuk
mengurangi arus yang mengalir ke dalam LED.
.
Gambar 3.3. Rangkaian Sumber Cahaya
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
37
vcc
Pin ADC sinyal analog
3.3.2.2 Pembuatan Detektor Cahaya
Detektor cahaya merupakan perangkat yang dapat memberikan respon
listrik untuk mengukur cahaya yang datang. Dalam Penelitian ini detektor yang
digunakan menggunakan LDR yang berfungsi memberikan respon berupa
perubahan hambatan ketika terkena paparan cahaya. Semakin tinggi intensitas
paparan yang mengenai LDR maka hambatannya akan semakin kecil, begitu pula
sebaliknya. Rangkaian detetor cahaya menggunakan LDR ditunjukan Gambar 3.4.
Gambar 3.4.Rangkaian Detektor Cahaya
Dari gambar 3.4 dapat dijelaskan bahwa sinyal analog dapat dihasilkan
dengan sistem pembagi tegangan 5V. Detektor dibuat dengan menggunakan
prinsip pembagi tegangan. Persamaan dari pembagi tegangan ditunjukkan sebagai
berikut :
Vout = Vcc (3.1)
Pembagi tegangan 5V terdiri dari LDR disusun seri dengan resistor 10KΩ. Kaki
input analog Arduino Uno atau PIN ADC digunakan untuk membaca sinyal ini.
Komponen utama dalam pembuatan detektor adalah Light Dependent Resistor
(LDR) sebagai sensor cahaya, variable resistor, dan kapasitor. Terdapat dua buah
detektor yang digunakan yaitu untuk mendeteksi intensitas modulasi dan
intensitas referensi. Setelah dibuat dan kemudian diuji dengan mencari 2 variabel
+5V
LDR
R 10 KΩ
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
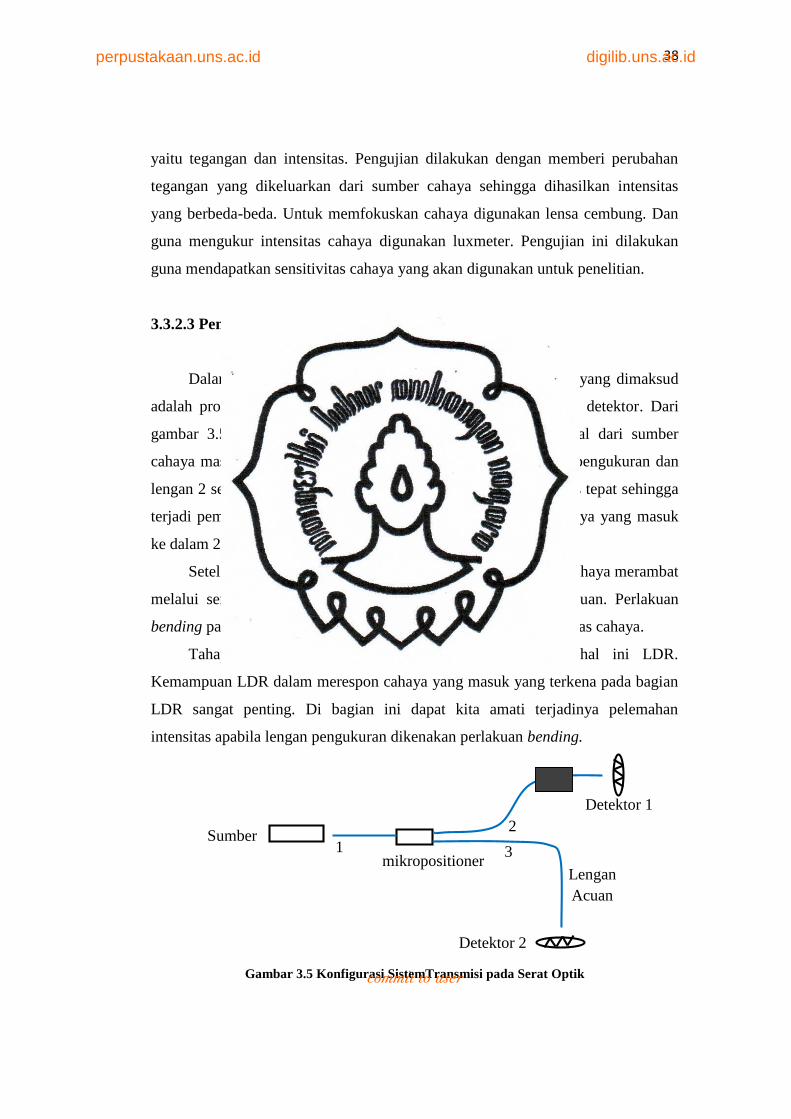
38
yaitu tegangan dan intensitas. Pengujian dilakukan dengan memberi perubahan
tegangan yang dikeluarkan dari sumber cahaya sehingga dihasilkan intensitas
yang berbeda-beda. Untuk memfokuskan cahaya digunakan lensa cembung. Dan
guna mengukur intensitas cahaya digunakan luxmeter. Pengujian ini dilakukan
guna mendapatkan sensitivitas cahaya yang akan digunakan untuk penelitian.
3.3.2.3 Pembuatan Sistem Transmisi Cahaya pada Serat Optik
Dalampembuatan sistem transmisi cahaya pada serat optik yang dimaksud
adalah proses jalannya cahaya dari sumber cahaya sampai pada detektor. Dari
gambar 3.5 dapat dijelaskan bahwa berkas cahaya yang berasal dari sumber
cahaya masuk ke dalam 2 lengan yaitu lengan 1 sebagai lengan pengukuran dan
lengan 2 sebagai lengan acuan. Penempatan mikropositioner harus tepat sehingga
terjadi pembagian cahaya secara maksimal artinya intensitas cahaya yang masuk
ke dalam 2 lengan serat optik sama besar.
Setelah berkas sinar masuk ke dalam serat optik kemudian cahaya merambat
melalui serat optik melewati lengan pengukuran dan lengan acuan. Perlakuan
bending pada lengan pengukuran menyababkan pelemahan intensitas cahaya.
Tahap terakhir akan dilakukan oleh detektor dalam hal ini LDR.
Kemampuan LDR dalam merespon cahaya yang masuk yang terkena pada bagian
LDR sangat penting. Di bagian ini dapat kita amati terjadinya pelemahan
intensitas apabila lengan pengukuran dikenakan perlakuan bending.
Gambar 3.5 Konfigurasi SistemTransmisi pada Serat Optik
LenganAcuan
SumberCahaya 3
21
mikropositioner
Detektor 2
Detektor 1
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
39
3.4 Pembuatan Silinder Ulir
Pembuatan silinder ulir menggunakan bahan rubber silicone RTV 683.
Bahan ini sangat bagus digunakan untuk eksperimen bending, hal ini dikarenakan
selain elastis atau dapat kembali ke bentuk semula, bahan ini juga tahan terhadap
suhu lingkungan.
Bahan rubber silicone RTV 683 kemudian dicampur dengan hardener
RTV683 kemudian dibuat cetakan. Diameter cetakan yang dipakai adalah 10 mm,
15 mm, 20 mm dan 25 mm (Gambar 3.7). Agar silinder dari rubber tersebut
mudah di bengkokkan saat ditekan tetapi elastis, maka silinder tersebut dicetak
dengan memberi lubang di bagian tengahnya (Gambar 3.6).
Gambar 3.6 Desain Rubber Berulir
Ulir yang ada di luar silinder ini berguna untuk menempatkan serat optik sehingga
serat optik terlindungi dan tidak bergeser saat adanya penekanan.Bahan yang
digunakan dalam pembuatan silinder ulir ialah silicone rubber RTV683 dan
Hardener silicone rubber 683. Cara pembuatan silinder ulir sebagai berikut:
1. Menuangkan silicone rubber RTV 683 sebanyak 50ml pada wadah.
2. Menuangkan hardener silicone rubber 683 ke dalam silicone rubber RTV
683 sebanyak 0,25 ml.
3. Mengaduk rubber hingga tercampur merata dan menunggu sesaat.
4. Menuangkan rubber ke dalam cetakan berulir.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
40
5. Memberikan plat batang silinder tepat ditengah-tengah cetakan ulir.
6. Setelah dibiarkan selama ± 24 jam kemudian diambil cetakannya.
(a) (b) (c) (d)
Gambar 3.7. Cetakan Berulir Diameter (a) 1 cm; (b) 1,5 cm; (c) 2 cm; (d) 2,5 cm.
Gambar 3.7 merupakan gambar cetakan berulir dengan beberapa diameter
yang berbeda yaitu diameter 1 cm, 1,5 cm, 2 cm dan 2,5 cm. Cetakan yang berada
pada gambar 3.7 terbuat dari besi berongga dengan bagian dalam besi terdapat ulir
dengan jarak antar ulir sebesar 1 mm. Sedangkan penutup cetakan terbuat dari
besi padat dimana ¾ bagian berbentuk polos dan ¼ bagian berbentuk ulir. Silinder
rubber ulir berongga dapat dibentuk melalui proses penuangan karet cair kedalam
cetakan berongga dan menutup dengan penutup cetakan.
3.4.1 Pembuatan Sistem Serat Optik Silinder Rubber Ulir Berongga
Tahap pembuatan sistem serat optik silinder rubber ulir berongga dibagi
menjadi tiga tahap yaitu : tahap pembuatan cetakan silinder rubber ulir berongga,
tahap pembuatan silinder rubber ulir berongga dan tahap pembuatan sensor serat
optik. Setelah membuat cetakan berulir diameter dan dilanjutkan pengujian,
kemudian diikuti dengan pembuatan sistem serat optik silinder rubber ulir
berongga. Pembuatan silinder rubber ulir berongga dimulai terlebih dahulu dibuat
tahap pembuatan cetakan silinder rubber ulir berongga mengguanakan resin.
PenutupCetakan polos
BadanCetakanberulir
PenutupCetakan Ulir
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
41
Cetakan silinder rubber ulir berongga dibuat dengan cara menuangkan bahan
resin ke dalam balok dari akrilik yang sebelumnya dipasang Besi berulir dengan
diameter 1 cm dan panjang 55 cm dibagian tengahnya. Besi berulir ini dapakai
karena berfungsi memberi motif ulir pada cetakan silinder berulir dan juga
memberi rongga. Pemberian ulir berguna untuk menempatkan serat optik agar
tidak bergeser saat diberi tekanan. Cetakan terbentuk sesuai gambar 3.8.
Gambar 3.8. Cetakan Silinder Berulir
Tahap berikutnya adalah Tahap pembuatan silinder rubber ulir berongga.
Teknik pembutan silinder rubber ulir berongga yaitu dengan menggunakan
pompa udara (gambar 3.9) untuk memasukkan rubber silicone yang sudah
dicampur dengan hardener kedalam cetakan gambar 3.8. Setelah rubber silicone
dipompa kedalam cetakan kemudian batang panjang dengan diameter 0.5 cm
dimasukkan untuk membuat rongga pada silinder berulir. Dengan menggunakan
teknik ini maka rubber silicone akan merata ke semua tempat pada cetakan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
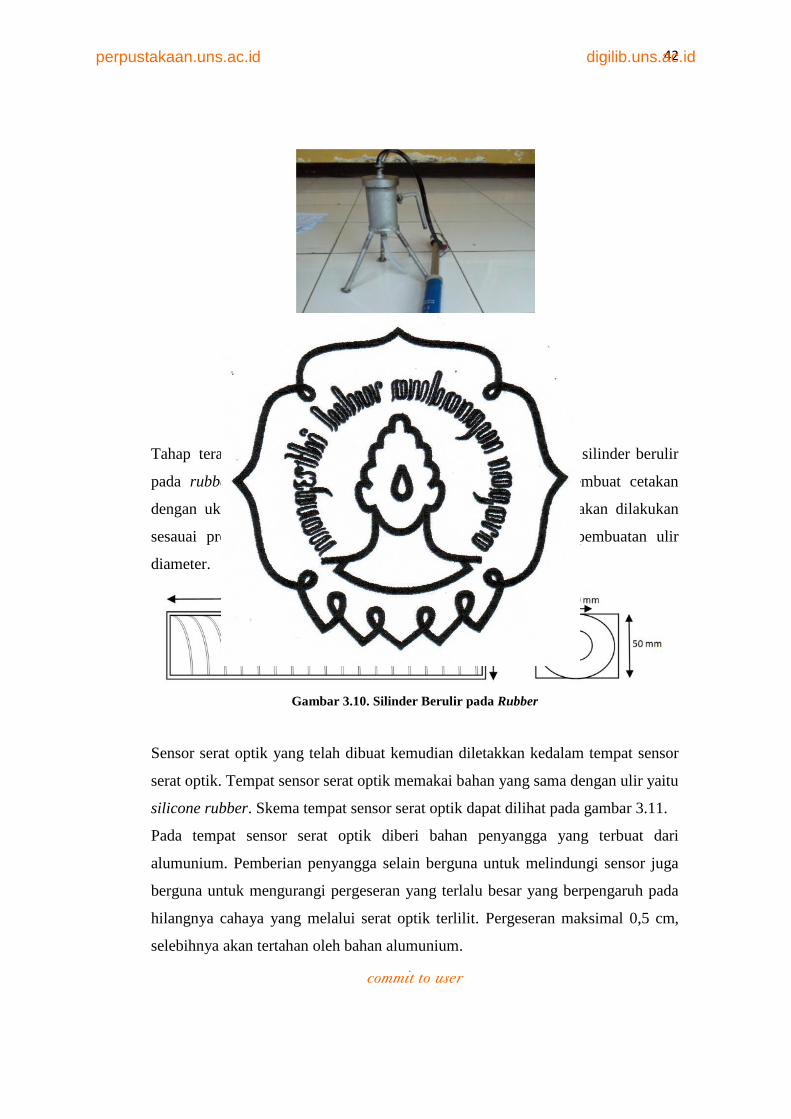
42
Gambar 3.9 Set Pompa dan Tabung Campuran Rubber
Tahap terakhir yaitu tahap pembuatan sensor serat optik dengan silinder berulir
pada rubber gambar 3.10. Pada tahap ini dimulai dengan membuat cetakan
dengan ukuran 50 cm x 2,5 cm x 1 cm. tahap pembuatan cetakan dilakukan
sesauai prosedur pembuatan ulir yang telah dilakukan pada pembuatan ulir
diameter.
Gambar 3.10. Silinder Berulir pada Rubber
Sensor serat optik yang telah dibuat kemudian diletakkan kedalam tempat sensor
serat optik. Tempat sensor serat optik memakai bahan yang sama dengan ulir yaitu
silicone rubber. Skema tempat sensor serat optik dapat dilihat pada gambar 3.11.
Pada tempat sensor serat optik diberi bahan penyangga yang terbuat dari
alumunium. Pemberian penyangga selain berguna untuk melindungi sensor juga
berguna untuk mengurangi pergeseran yang terlalu besar yang berpengaruh pada
hilangnya cahaya yang melalui serat optik terlilit. Pergeseran maksimal 0,5 cm,
selebihnya akan tertahan oleh bahan alumunium.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
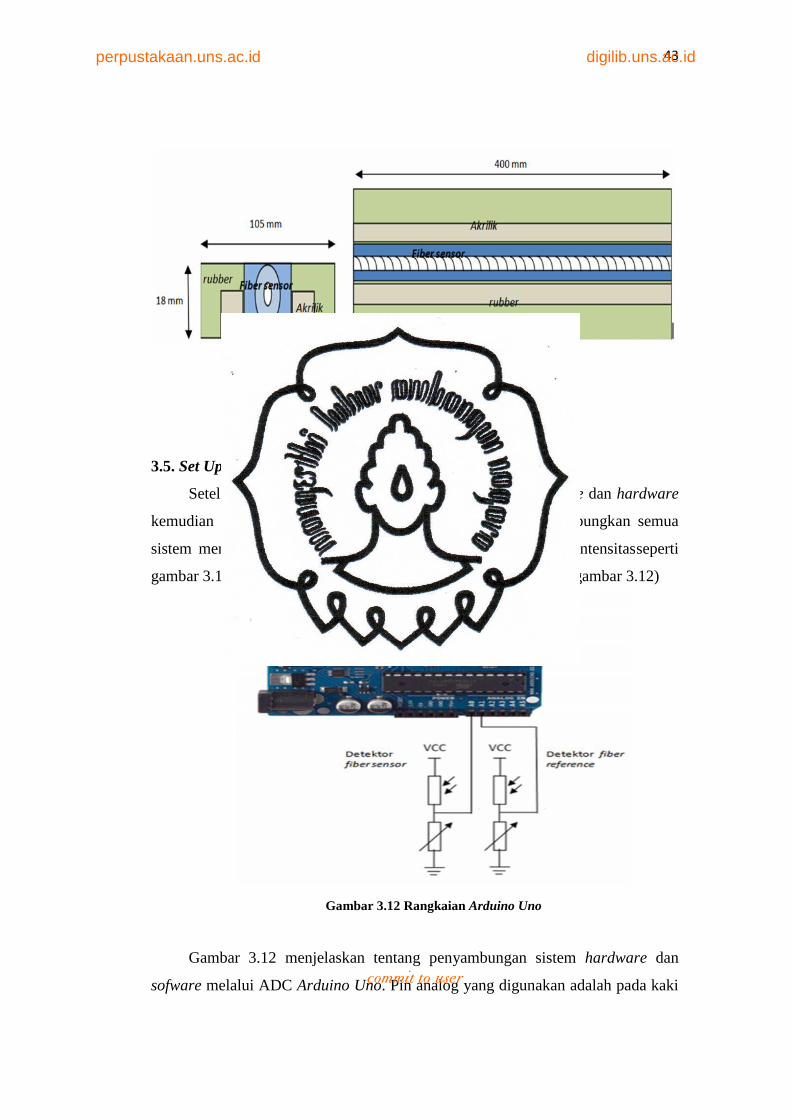
43
(a) (b)
Gambar 3.11. Skema Tempat Sensor Serat Optik
(a) Tampak depan, (b) Tampak Belakang,
3.5. Set Up Alat
Setelah semua sistem yang dibutuhkan tersedia baik sofware dan hardware
kemudian dilanjutkan dengan set up alat yaitu dengan menggabungkan semua
sistem menjadi perangkat sensor serat optik berbasis modulasi intensitasseperti
gambar 3.1. Interface ADC yang digunakan adalah Arduino Uno (gambar 3.12)
Gambar 3.12 Rangkaian Arduino Uno
Gambar 3.12 menjelaskan tentang penyambungan sistem hardware dan
sofware melalui ADC Arduino Uno. Pin analog yang digunakan adalah pada kaki
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
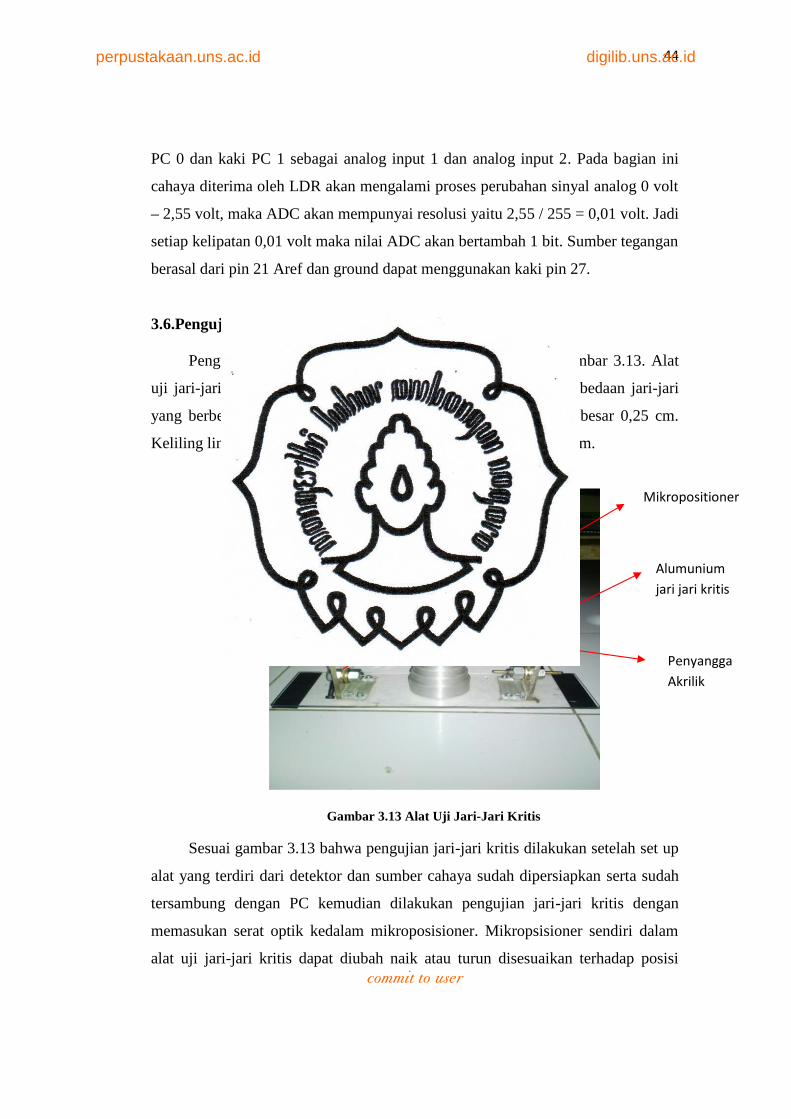
44
PC 0 dan kaki PC 1 sebagai analog input 1 dan analog input 2. Pada bagian ini
cahaya diterima oleh LDR akan mengalami proses perubahan sinyal analog 0 volt
– 2,55 volt, maka ADC akan mempunyai resolusi yaitu 2,55 / 255 = 0,01 volt. Jadi
setiap kelipatan 0,01 volt maka nilai ADC akan bertambah 1 bit. Sumber tegangan
berasal dari pin 21 Aref dan ground dapat menggunakan kaki pin 27.
3.6.Pengujian Jari-jari kritis
Pengujian jari jari kritis menggunakan alat seperti pada gambar 3.13. Alat
uji jari-jari kritis ini memiliki tinggi 24 cm dan memiliki 12 perbedaan jari-jari
yang berbeda dengan perbedaan antar jari-jari masing-masing sebesar 0,25 cm.
Keliling lingkaran paling besar adalah 3 cm dan paling kecil 0,25 cm.
Gambar 3.13 Alat Uji Jari-Jari Kritis
Sesuai gambar 3.13 bahwa pengujian jari-jari kritis dilakukan setelah set up
alat yang terdiri dari detektor dan sumber cahaya sudah dipersiapkan serta sudah
tersambung dengan PC kemudian dilakukan pengujian jari-jari kritis dengan
memasukan serat optik kedalam mikroposisioner. Mikropsisioner sendiri dalam
alat uji jari-jari kritis dapat diubah naik atau turun disesuaikan terhadap posisi
Mikropositioner
Alumuniumjari jari kritis
PenyanggaAkrilik
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
45
diameter alumunium jari-jari kritis yang dikehendaki. Peneliti harus memastikan
alumunium jari-jari kritis sudah berdiri tegak dalam penyangga akrilik.
3.7 Pengambilan Data
Pengambilan data dilakukan dengan pengukuran beda potensial.
Pengukuran beda potensial dilakukan dengan menggunakan software akuisisi data
yaitu Labview. Pengukuran beda potensial dilakukan setiap perubahan bending
yang diberikan. Nilai tegangan input (Vin) yang didapatkan dari detektor yang
berada pada lengan referensi yang tidak dikenai perlakuan bending dan tegangan
output (Vout) yang didapatkan dari detektor dimana detektor dihubungkan dengan
lengan modulasi.
3.8. Pengujian Histerisis Loss pada Serat Optik
Pengambilan data awal dilakukan setelah melakukan pengujian jari-jari
kritis adalah pengujian histerisis loss pada serat optik yang dililitkan pada rubber
yang berbentuk silinder berongga. Pengujian histerisis loss pada serat optik
menggunakan skema set up seperti pada gambar 3.1. pengujian ini mempunyai
tujuan untuk mengetahui bahwa perubahan loss saat diberi tekanan dan pada saat
dihilangkan secara bertahap dalam batas ketelitian laboratorium adalah sama.
Pengambilan data dilakukan dengan mengukur sinyal optik dari sensor serat
optik berdasarkan beban berjalan yang diberikan. Beban berjalan dalam penelitian
ini menggunakan mobil remote control (RC). Bagian atas mobil RC tersebut
diberi 3 tempat yakni depan, tengah dan belakang untuk meletakkan beban seperti
yang ditunjukkan pada gambar 3.14.
Data diambil dengan cara sensor serat optik dilewati mobil RC dengan
variasi beban dan kecepatan konstan. Kemudian dengan beban konstan dan variasi
kecepatan. Sistem yang sudah dibuat akan mencatat sinyal optik yang keluar dari
sensor serat optik. Sinyal optik ini kemudian ditampilkan dalam grafik
transmitansi cahaya versus waktu. Berikut merupakan tabel pengambilan data
beserta variasi yang dilakukan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
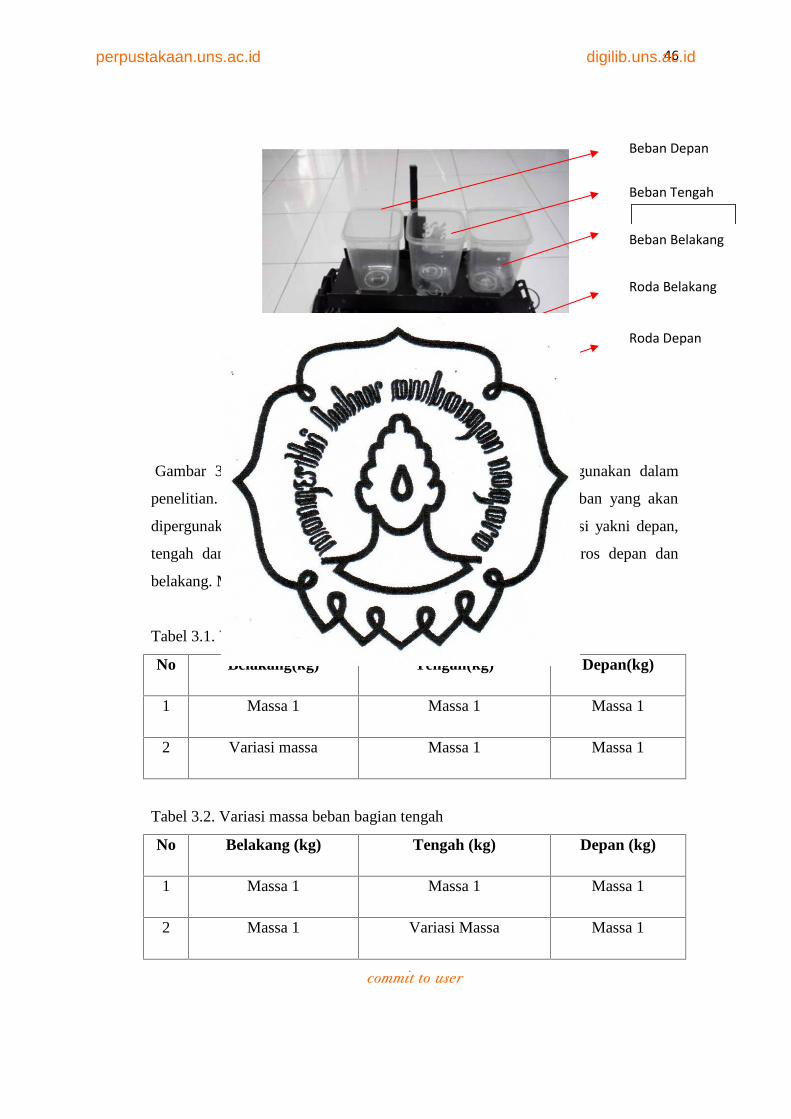
46
Gambar 3.14 Mobil RC dengan Posisi Tanpa Beban
Gambar 3.14 merupakan mobil remote contro l(RC) yang digunakan dalam
penelitian. Di atas mobil RC diberi wadah guna menambah beban yang akan
dipergunakan dalam pengujian. Wadah terdiri dari 3 tempat posisi yakni depan,
tengah dan belakang. Selain itu roda juga terdiri dari dua poros depan dan
belakang. Mobil RC menggunakan daya 5 V.
Tabel 3.1. Variasi massa beban bagian belakang
No Belakang(kg) Tengah(kg) Depan(kg)
1 Massa 1 Massa 1 Massa 1
2 Variasi massa Massa 1 Massa 1
Tabel 3.2. Variasi massa beban bagian tengah
No Belakang (kg) Tengah (kg) Depan (kg)
1 Massa 1 Massa 1 Massa 1
2 Massa 1 Variasi Massa Massa 1
Beban Depan
Beban Tengah
Beban Depan
Beban Belakang
Roda Belakang
Roda Depan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
47
Tabel 3.3 Variasi massa beban bagian depan
No Belakang (kg) Tengah (kg) Depan (kg)
1 Massa 1 Massa 1 Massa 1
2 Massa 1 Massa 1 Variasi Massa
Tabel 3.4 Variasi Kecepatan dengan massa beban tetap
No Belakang (kg) Tengah (kg) Depan (kg) Kecepatan (m/s)
1 Massa 1 Massa 2 Massa 3 Kecepatan 1
2 Massa 1 Massa 2 Massa 3 Variasi Kecepatan
Untuk mengukur kecepatan perlu digunakan program photogate
velocitymeter. Alat ini dipasang pada set up alat berguna untuk mengukur
kecepatan mobil RC yang melewati sensor serat optik. Penempatan sensor
photogate velocitymeter di kanan dan kiri sensor serat optik. Dengan
menempatkan laser yang diberi tegangan baterai. Pemberian tegangan baterai
dikarenakan lebih stabil tegangannya. Untuk megakuisisi data dari phogate
digunakan sisitem akuisisi data.
3.9. Analisis Data
Dari pengambilan data diperoleh hubungan antara besarnya bending yang
diberikan terhadap pergeseran dan Intensitas yang terdeteksi oleh LDR , hubungan
jari-jari kritis dengan transmitansi dan loss dan hubungan kecepatan dan loss. Dari
data yang diperoleh selanjutnya data dianalisis dengan acuan teori-teori yang ada.
3.10. Kesimpulan
Kesimpulan dilakukan setelah menganalisis data yang telah dihasilakan dari
penelitian serta memberikan saran untuk memperbaiki penelitian selanjutnya.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
48
BAB IV
HASIL DAN PEMBAHASAN
Penelitian ini mempunyai tujuan mengetahui pengaruh kecepatan terhadap
perubahan intensitas cahaya yang terdapat pada sensor serat optikberbasis aplikasi
weigh in motion (WIM) dengan batasan masalah adalah lilitan dibuat dengan jari-
jari di sekitar jari-jari kritis dan sensor dibuat untuk bobot hingga 10 ton. Serat
optik yang digunakan adalah serat optik multimode POF yang lebih mudah
dimasuki cahaya karena memiliki diameter lebih besar 8-12 μm atau 1/6 dari
diameter single mode. Polymer optical fiber (POF) digunakan karena memiliki
tingkat loss yang lebih teratur dibandingkan serat optik berbahan plastik .
Pada prinsipnya penelitian ini mempunyai prinsip mengukur gelombang
elektromagnetik yang telah melalui sebuah media dalam hal ini serat optik yang
telah dililitkan pada sebuah koil karet. Koil karet menjadi bahan penting kedua
setelah serat optik. Dalam perambatan di dalam serat optik yang telah dililitkan
dalam koil karet mengalami berbagai gangguan diantaranya bengkokan dan
tekanan. Sehingga menyebabkan penurunan transmitansi atau penurunan cahaya
yang diteruskan oleh serat optik.
Komponen penting yang digunakan dalam penelitian ini diantaranya
adalah sumber cahaya (LED) dan detektor (LDR). Kestabilan tegangan sangat
diperlukan guna mendapatkan hasil yang maksimal. Oleh karena itu sumber
cahaya menggunakan sumber daya adaptor. Sedangkan detektor yang digunakan
untuk menangkap gelombang elektomagnetik dalam hal ini cahaya adalah LDR.
LDR sendiri merupakan jenis resistor yang merespon perubahan intensitas cahaya
yang mengenainya. Semakin tinggi intensitas cahaya yang masuk ke LDR, maka
semakin kecil hambatannya. LDR dipilih sebagai detektor karena mempunyai
daerah kerja yang sesuai dengan panjang gelombang sumber cahaya yang
digunakan (LED). Untuk mengetahui sensitivitas dari LDR yang digunakan dalam
penelitian dilakukan pengujian LDR, yang mendapatkan data sebagai berikut :
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
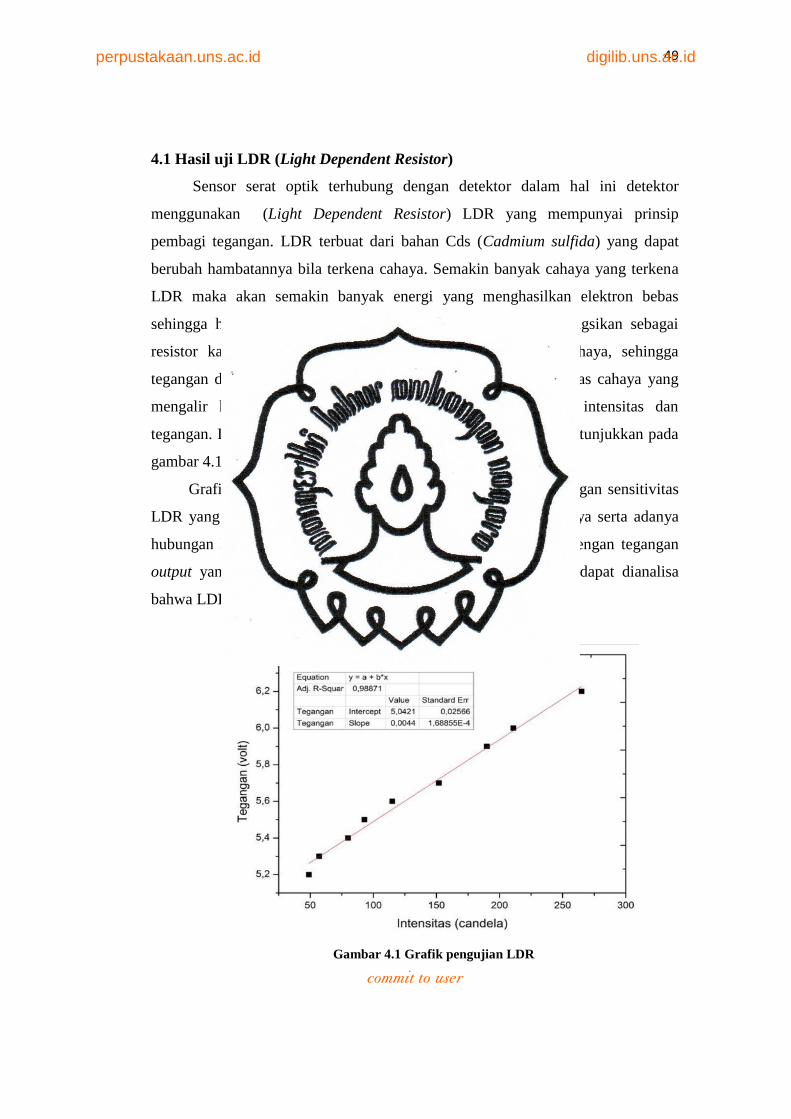
49
4.1 Hasil uji LDR (Light Dependent Resistor)
Sensor serat optik terhubung dengan detektor dalam hal ini detektor
menggunakan (Light Dependent Resistor) LDR yang mempunyai prinsip
pembagi tegangan. LDR terbuat dari bahan Cds (Cadmium sulfida) yang dapat
berubah hambatannya bila terkena cahaya. Semakin banyak cahaya yang terkena
LDR maka akan semakin banyak energi yang menghasilkan elektron bebas
sehingga hambatan akan semakin turun. Pemakaian LDR difungsikan sebagai
resistor karena hambatan berubah-ubah terhadap intensitas cahaya, sehingga
tegangan dapat diukur. Nilai tegangan sebanding dengan intensitas cahaya yang
mengalir kedalam LDR pengujian LDR menghasilkan data intensitas dan
tegangan. Dari data kemudian diolah menghasilkan grafik yang ditunjukkan pada
gambar 4.1.
Grafik gambar 4.1 menunjukkan hasil bahwa adanya hubungan sensitivitas
LDR yang digunakan dan kelinierannya terhadap intensitas cahaya serta adanya
hubungan linier antara intensitas cahaya yang mengenai LDR dengan tegangan
output yang terukur. Dari hasil pengujian LDR tersebut maka dapat dianalisa
bahwa LDR dapat digunakan sebagai sensor cahaya.
Gambar 4.1 Grafik pengujian LDR
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
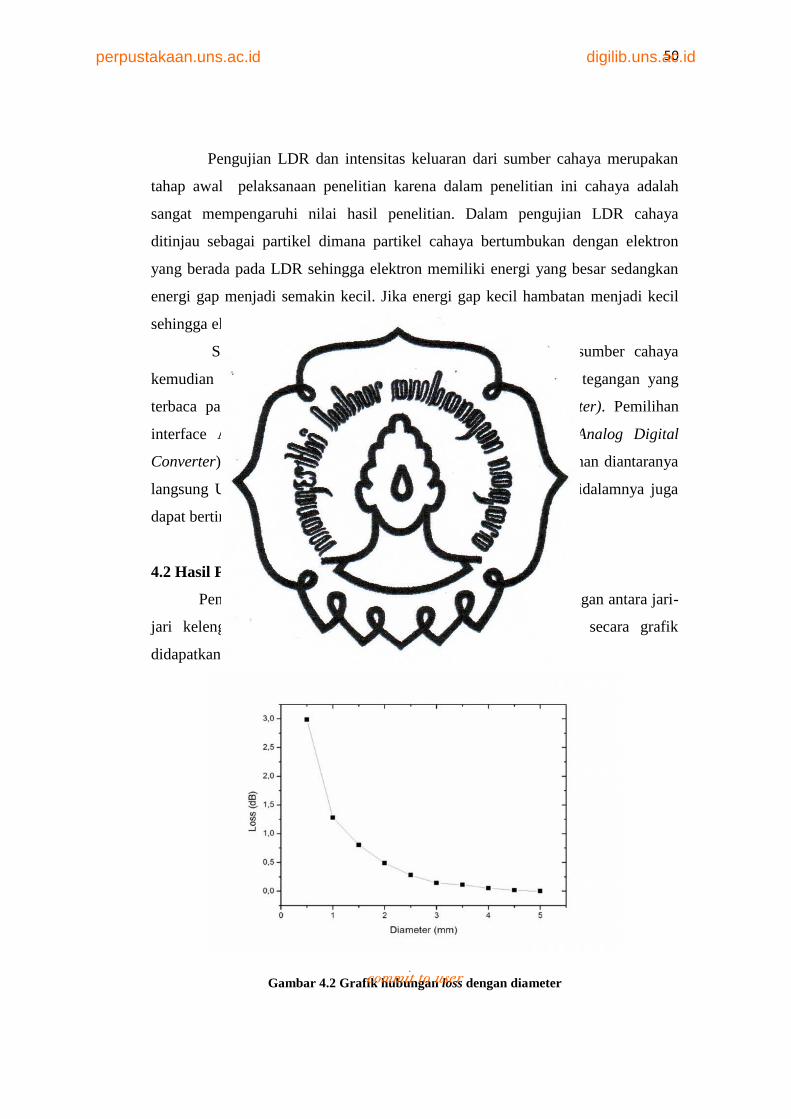
50
Pengujian LDR dan intensitas keluaran dari sumber cahaya merupakan
tahap awal pelaksanaan penelitian karena dalam penelitian ini cahaya adalah
sangat mempengaruhi nilai hasil penelitian. Dalam pengujian LDR cahaya
ditinjau sebagai partikel dimana partikel cahaya bertumbukan dengan elektron
yang berada pada LDR sehingga elektron memiliki energi yang besar sedangkan
energi gap menjadi semakin kecil. Jika energi gap kecil hambatan menjadi kecil
sehingga elektron dapat mengalir bila diberi beda potensial.
Setelah didapatkan hasil yang baik pada LDR dan sumber cahaya
kemudian dilanjutkan dengan pemilihan alat convert agar data tegangan yang
terbaca pada LDR mampu terbaca pada PC (personal Computer). Pemilihan
interface Arduino Uno dalam penelitian ini sebagai ADC (Analog Digital
Converter) adalah karena interface Arduino Uno memiliki kelebihan diantaranya
langsung USB dan dapat bersifat kendali mikrokontroler yang didalamnya juga
dapat bertindak sebagai ADC.
4.2 Hasil Pengujian Jari-Jari Kritis
Pengujian jari-jari kritis bertujuan untuk mengetahui hubungan antara jari-
jari kelengkungan dan nilai transmitansi cahaya. Pengujian secara grafik
didapatkan data grafik sesuai dengan gambar 4.2.
Gambar 4.2 Grafik hubungan loss dengan diameter
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
51
Gambar 4.2 merupakan grafik hubungan loss dengan diameter. Dari
gambar 4.2 dapat dianalisa bahwa ketika lilitan ditekan tidak serta merta rugi-rugi
muncul. Baru setelah mengalami beberapa pergeseran rugi-rugi muncul. Hal ini
dikarenakan pembengkokan pada lilitan belum sampai pada sudut kritis. Loss
mulai mengalami kenaikan pada diameter 2,5 cm. Pada diameter 3 cm sampai 5
cm kurang terlihat mengalami loss sedangkan pada diameter 0,5 cm terlalu besar
kenaikan loss-nya. Selain itu dari gambar 4.2 dapat dianalisa bahwa semakin kecil
diameter semakin besar nilai loss. Hal ini disebabkan karena transmitansi yang
kecil.
Loss merupakan daya cahaya yang hilang. Loss merupakan kebalikan dari
tranmitansi dengan satuan decibell sedangkan transmitansi memiliki satuan (%).
Dari pengujian loss terhadap pergeseran didapatkan data tranmitansi yang diolah
menggunakan persamaan 2.38. dari persamaan 2.38 dapat diketahui nilai loss
sebagai berikut :
= 10. ( ) (4.1)
Jika hasil dari pengukuran intensitas adalah berupa tegangan (V) maka
(T=Pin/Pout), sehingga daya (P) harus diubah menjadi tegangan(V). Hubungan
antara daya dan tegangan dapat dilihat pada persamaan 4.2.= (4.2)
Karena hambatannya tetap, maka perbandingan Pin dengan Pout menjadi seperti
berikut : = 10. ( ( )( ) ) (4.3)
atau = 10. ( ) (4.4)
Sesuai persamaan logaritma, maka persamaan 4.4 menjadi= 20. ( ) (4.5)
Persamaan 4.5 menunjukkan hubungan antara nilai rugi-rugi serat optik
dengan perbandingan tegangan. Persamaan 4.5 dipergunakan dalam penelitian
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
52
untuk menghitung nilai loss dengan memasukkan nilai tegangan input (Vin) yang
didapatkan dari detektor yang berada pada lengan referensi yang tidak dikenai
perlakuan bending dan tegangan output (Vout) yang didapatkan dari detektor
dimana detektor dihubungkan dengan lengan modulasi.
Dalam perolehan hasil loss ditentukan oleh nilai tegangan input ataupun
output. Besar kecilnya tegangan dipengaruhi oleh besar kecilnya pembengkokan.
Dari pengujian jari-jari kritis dapat dianalisa bahwa sudut datang dan posisi awal
sinar masuk ke dalam serat optik sangat berdampak besar dalam menentukan jalur
yang akan dilalui oleh sinar dalam serat optik. Dapat dijelaskan bahwa cahaya
merambat dalam serat optik dapat mengalami berbagai proses diantaranya yang
pertama sinar tidak masuk ke dalam core serat optik, yang kedua sinar mengalami
TIR (Total Internal Reflection) atau pemantulan internal total dikarenakan sudut
datang lebih besar dari sudut kritis sehingga sinar dapat merambat dalam core
serat optik dan yang ketiga sinar tidak dapat merambat dalam core serat optik
dikarenakan sudut datang lebih kecil dari sudut kritis.
Dari ketiga perambatan sinar, seiring dengan bertambahnya
pembengkokan dan bertambahnya jari-jari, tegangan tidak hilang seluruhnya
melainkan terjadi penurunan tegangan. Hal ini disebabkan oleh faktor kemampuan
sinar optik dalam memerangkap cahaya dari sinar datang yaitu Numerical
Aperture. Sinar yang mencoba masuk ke dalam serat optik datang tidak terfokus
pada satu sudut datang saja. Telah diketahui bahwa Numerical Apertur (NA) serat
optik adalah suatu parameter yang mengukur kemampuan serat optik dalam
mengumpulkan cahaya. Semakin besar nilai NA yang dimiliki dari serat optik
menunjukkan semakin besar efisiensi sumber cahaya yang akan diterima untuk
mengkopling sinar ke dalam serat optik.
Setelah sinar terperangkap masuk kedalam serat optik dan dibengkokkan
maka sesuai dengan gambar 2.11 diketahui bahwa cahaya masuk melalui serat
optik mengenai daerah dimana mempunyai sudut datang lebih besar daripada
sudut kritis maka akan terjadi pemantulan sempurna sehingga cahaya banyak yang
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
53
ditransmisikan. Hal ini dapat dijelaskan bahwa sinar datang yang masuk kedalam
serat optik dengan sudut datang melebihi sudut kritis ketika melewati daerah
pembengkokkan maka sinar tetap di dalam jalur core serat optik, setelah melewati
daerah pembengkokkan berubah lagi sudutnya menjadi semakin kecil tetapi masih
dalam range lebih besar dari sudut kritis sehingga hanya mengalami pelemahan
atau loss saja.
Berbeda hasil dengan cahaya yang mengenai daerah dimana daerah
tersebut memiliki sudut datang lebih kecil daripada sudut kritis maka tidak akan
terjadi pemantulan sempurna. Hal ini dijelaskan bahwa sinar yang merambat
dalam serat optik akan mengikuti garis normal yang selalu mengarah tegak lurus
terhadap permukaan inti kemudian setelah serat optik dibengkokkan maka garis
normal mengikuti permukaan bidang sehingga terjadi perubahan sudut yang
nilainya lebih kecil dari sudut kritis sehingga pada kondisis ini sinar akan lolos
keluar dari core serat optik. Pada akhirnya mempengaruhi terjadinya loss atau
pengurangan transmisi sehingga cahaya banyak yang hilang.
Pada penelitian ini dapat dianalisa bahwa semakin kecil diameter semakin
besar nilai loss. Dari pengujian diketahui bahwa pada range diameter 2,5 cm
sampai 1 cm dapat digunakan sebagai acuan dalam penelitian sensor serat optik
yang terbengkokkan. Acuan penelitian ini berguna untuk mengetahui sensitifitas
nilai diameter koil yang akan digunakan untuk sensor beban.
4.3 Pengujian Transmitansi dan Loss terhadap Pergeseran
Pengujian transmitansi dengan loss dilakukan setelah dilakukan pengujian
jari-jari kritis. Pengujian transmitansi dan loss dimulai dengan pembuatan koil
karet berulir, kemudian dilanjutkan dengan pelilitan serat optik dan pemasangan
pada set up alat pengujian. Pada dasarnya sebelum dilakukan penekanan pada
serat optik yang telah dililitkan ke koil karet berulir sudah terjadi pelemahan
transmitansi atau loss. Hal ini telah dijelaskan di awal.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
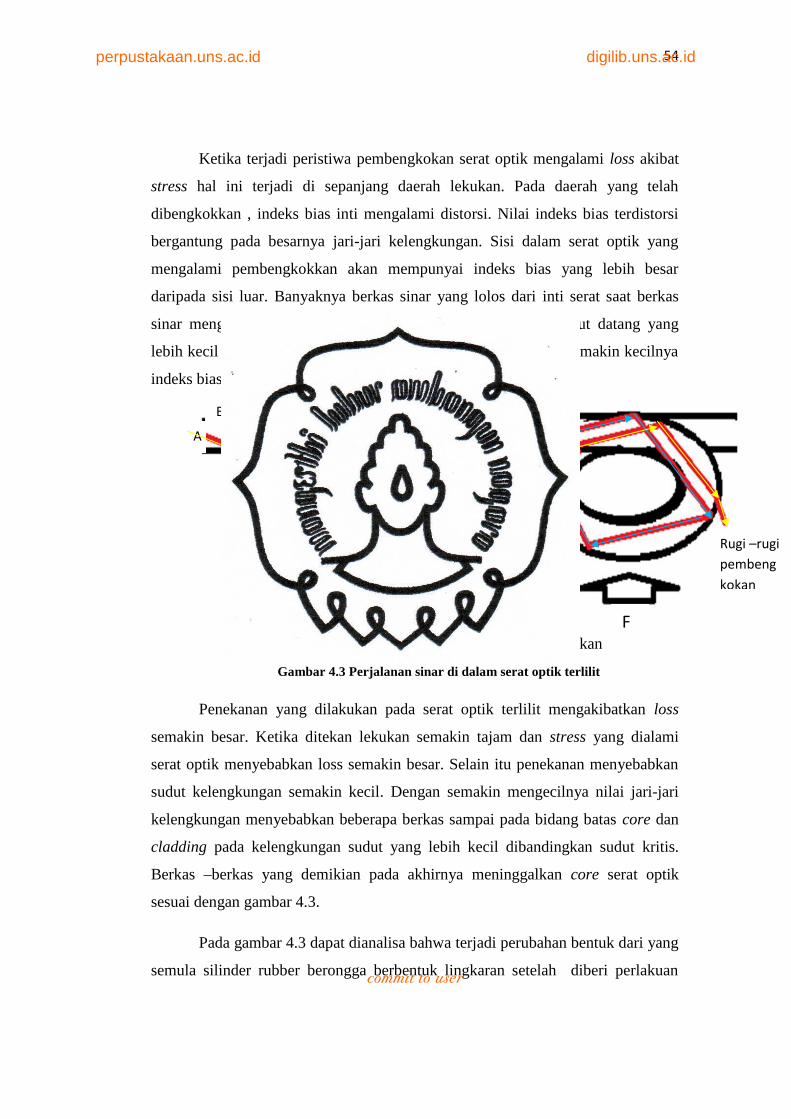
54
Ketika terjadi peristiwa pembengkokan serat optik mengalami loss akibat
stress hal ini terjadi di sepanjang daerah lekukan. Pada daerah yang telah
dibengkokkan , indeks bias inti mengalami distorsi. Nilai indeks bias terdistorsi
bergantung pada besarnya jari-jari kelengkungan. Sisi dalam serat optik yang
mengalami pembengkokkan akan mempunyai indeks bias yang lebih besar
daripada sisi luar. Banyaknya berkas sinar yang lolos dari inti serat saat berkas
sinar mengenai bidang batas core dengan cladding dengan sudut datang yang
lebih kecil dari sudut kritisnya akan semakin bertambah dengan semakin kecilnya
indeks bias separuh bagian serat optik.
Sebelum ditekan Sesudah ditekan
Gambar 4.3 Perjalanan sinar di dalam serat optik terlilit
Penekanan yang dilakukan pada serat optik terlilit mengakibatkan loss
semakin besar. Ketika ditekan lekukan semakin tajam dan stress yang dialami
serat optik menyebabkan loss semakin besar. Selain itu penekanan menyebabkan
sudut kelengkungan semakin kecil. Dengan semakin mengecilnya nilai jari-jari
kelengkungan menyebabkan beberapa berkas sampai pada bidang batas core dan
cladding pada kelengkungan sudut yang lebih kecil dibandingkan sudut kritis.
Berkas –berkas yang demikian pada akhirnya meninggalkan core serat optik
sesuai dengan gambar 4.3.
Pada gambar 4.3 dapat dianalisa bahwa terjadi perubahan bentuk dari yang
semula silinder rubber berongga berbentuk lingkaran setelah diberi perlakuan
A
B A
B
F
Rugi –rugipembengkokan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
55
penekanan berubah bentuk menjadi ellips. Dari gambar 4.3 dapat dilihat pula
bahwa sinar yang semula sebelum ditekan dapat masuk serat optik dan keluar
menuju detektor, tetapi setelah ditekan menjadi tidak semua nya mampu keluar
dari serat optik menuju detektor. Hal ini dikarenakan sinar B setelah sampai pada
titik kelengkungan, sudut datang nya berubah menjadi lebih kecil dari sudut kritis
serhingga menyebabkan sinar vkeluar dari core. Semakin ditekan maka akan
menyebabkan semakin banyak berkas yang keluar dari inti dan semakin banyak
pula loss yang ditimbulkan.Prinsip inilah yang dimanfaatkan sebagai sensor yakni
timbulnya rugi-rugi daya akibat makrobending.
4.3.1 Pengujian Transmitansi terhadap Pergeseran
Pengujian transmitansi dan pergeseran didapatkan nilai intensitas modulasi
dan referensi, kemudian diolah menggunakan persamaan menghasilkan data
grafik hubungan transmitansi dengan pergeseran
= = (4.6)
Koil serat optik terlilit sebelumya teleh mengalami loss dikarenakan
lengkungan sehingga nilai transmitansinya tidak 100%. Untuk mengatasi hal itu
maka harus di normalisasi dengan menyamakan nilai referensi dan nilai modulasi.
Pada eksperimen atau pengujian, dalam menormalisasi transmitansi yang hilang
menggunakan atenuator dengan cara menggeser mikroposisioner pada ujung serat
optik yang mengenai detektor. Tujuan diberi atenuator adalah supaya cahaya
keluaran sama antara referensi dan modulasi.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
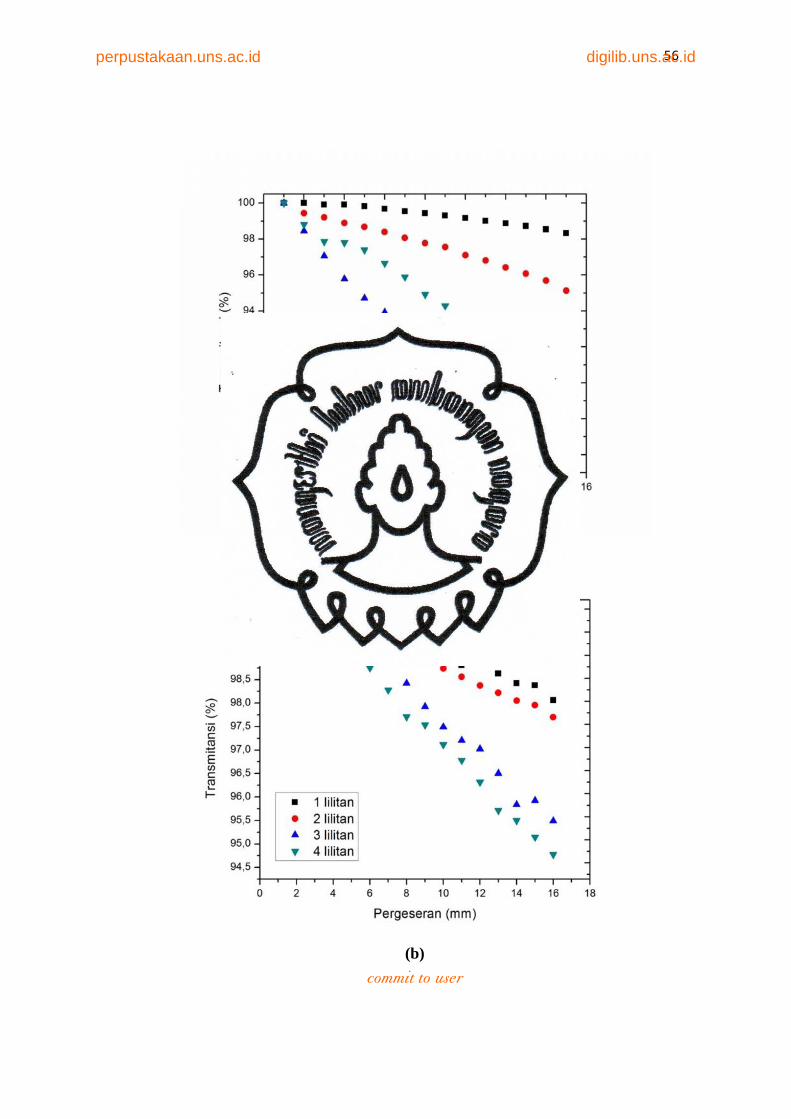
56
(a)
(b)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
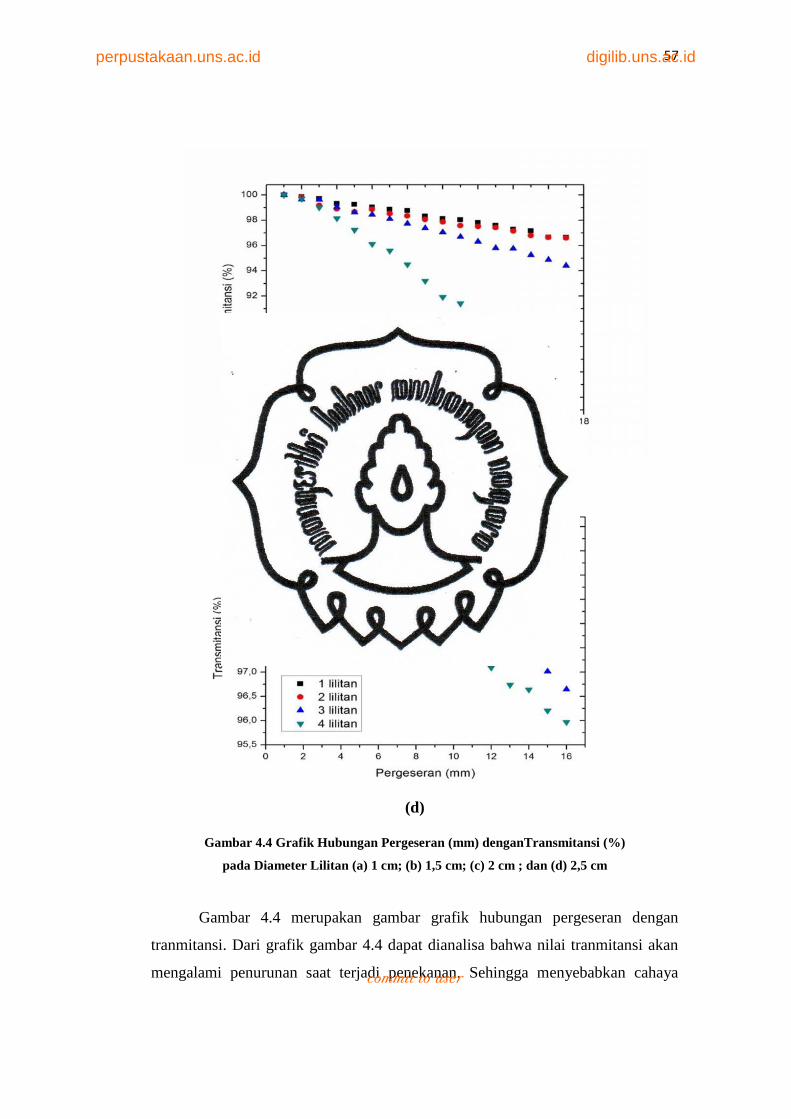
57
(c)
(d)
Gambar 4.4 Grafik Hubungan Pergeseran (mm) denganTransmitansi (%)
pada Diameter Lilitan (a) 1 cm; (b) 1,5 cm; (c) 2 cm ; dan (d) 2,5 cm
Gambar 4.4 merupakan gambar grafik hubungan pergeseran dengan
tranmitansi. Dari grafik gambar 4.4 dapat dianalisa bahwa nilai tranmitansi akan
mengalami penurunan saat terjadi penekanan. Sehingga menyebabkan cahaya
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
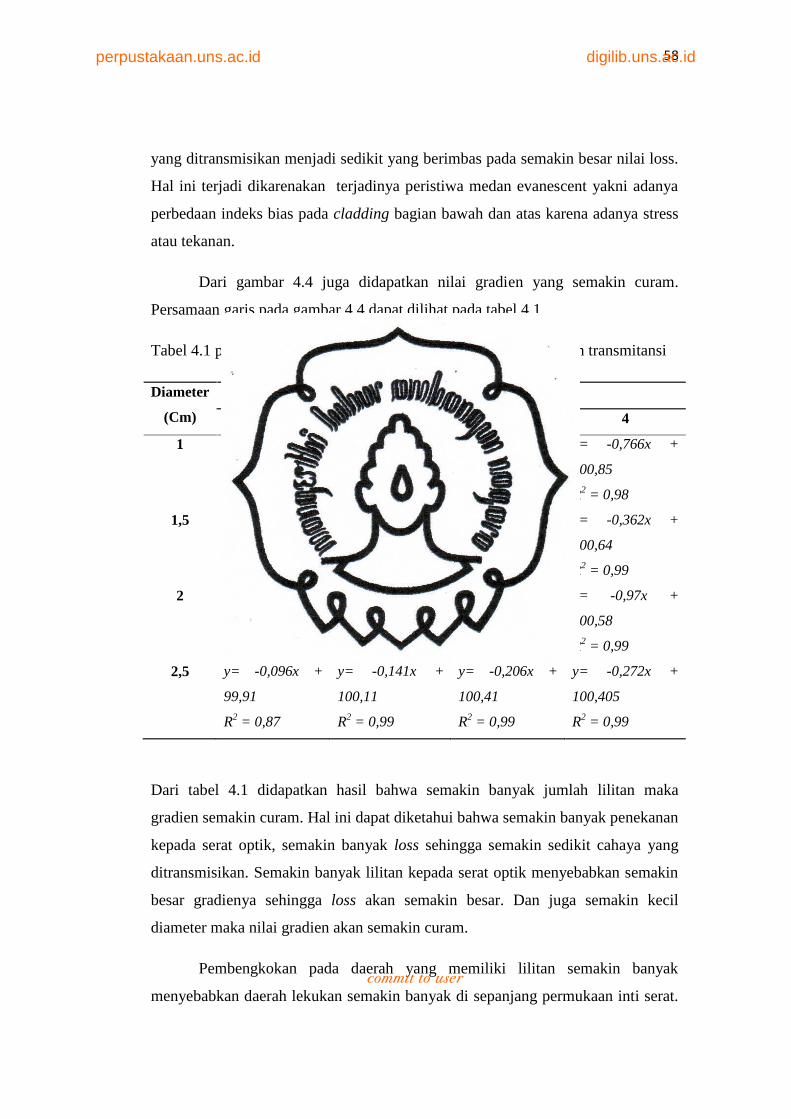
58
yang ditransmisikan menjadi sedikit yang berimbas pada semakin besar nilai loss.
Hal ini terjadi dikarenakan terjadinya peristiwa medan evanescent yakni adanya
perbedaan indeks bias pada cladding bagian bawah dan atas karena adanya stress
atau tekanan.
Dari gambar 4.4 juga didapatkan nilai gradien yang semakin curam.
Persamaan garis pada gambar 4.4 dapat dilihat pada tabel 4.1
Tabel 4.1 persamaan garis pada grafik hubungan pergeseran dengan transmitansi
Diameter
(Cm)
Jumlah Lilitan (N)
1 2 3 4
1 y=-0,123x +
100,33
R2 = 0,97
y= -0,325x +
100,27
R2 = 0,99
y= -0,964x +
100,04
R2 = 0,99
y= -0,766x +
100,85
R2 = 0,98
1,5 y= -0,133x +
100,42
R2 = 0,91
y= -0,155x +
100,254
R2 = 0,99
y= -0,306x +
100,55
R2 = 0,96
y= -0,362x +
100,64
R2 = 0,99
2 y= -0,214x +
100,30
R2 = 0,99
y= -0,206x +
99,96
R2 = 0,98
y= -0,348x +
100,46
R2 = 0,99
y= -0,97x +
100,58
R2 = 0,99
2,5 y= -0,096x +
99,91
R2 = 0,87
y= -0,141x +
100,11
R2 = 0,99
y= -0,206x +
100,41
R2 = 0,99
y= -0,272x +
100,405
R2 = 0,99
Dari tabel 4.1 didapatkan hasil bahwa semakin banyak jumlah lilitan maka
gradien semakin curam. Hal ini dapat diketahui bahwa semakin banyak penekanan
kepada serat optik, semakin banyak loss sehingga semakin sedikit cahaya yang
ditransmisikan. Semakin banyak lilitan kepada serat optik menyebabkan semakin
besar gradienya sehingga loss akan semakin besar. Dan juga semakin kecil
diameter maka nilai gradien akan semakin curam.
Pembengkokan pada daerah yang memiliki lilitan semakin banyak
menyebabkan daerah lekukan semakin banyak di sepanjang permukaan inti serat.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
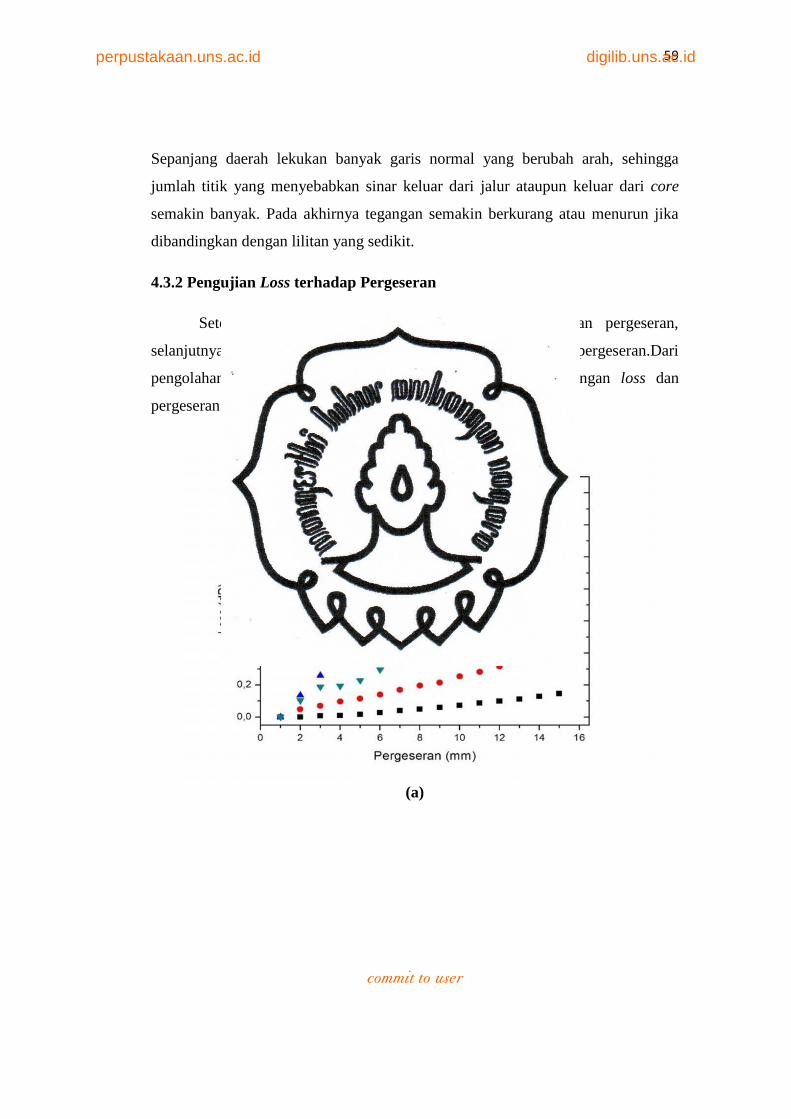
59
Sepanjang daerah lekukan banyak garis normal yang berubah arah, sehingga
jumlah titik yang menyebabkan sinar keluar dari jalur ataupun keluar dari core
semakin banyak. Pada akhirnya tegangan semakin berkurang atau menurun jika
dibandingkan dengan lilitan yang sedikit.
4.3.2 Pengujian Loss terhadap Pergeseran
Setelah mengetahui hubungan nilai tranmitansi dengan pergeseran,
selanjutnya dilakukan pengujian hubungan nilai loss terhadap pergeseran.Dari
pengolahan data loss dan pergeseran didapatkan grafik hubungan loss dan
pergeseran sebagai berikut :
(a)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
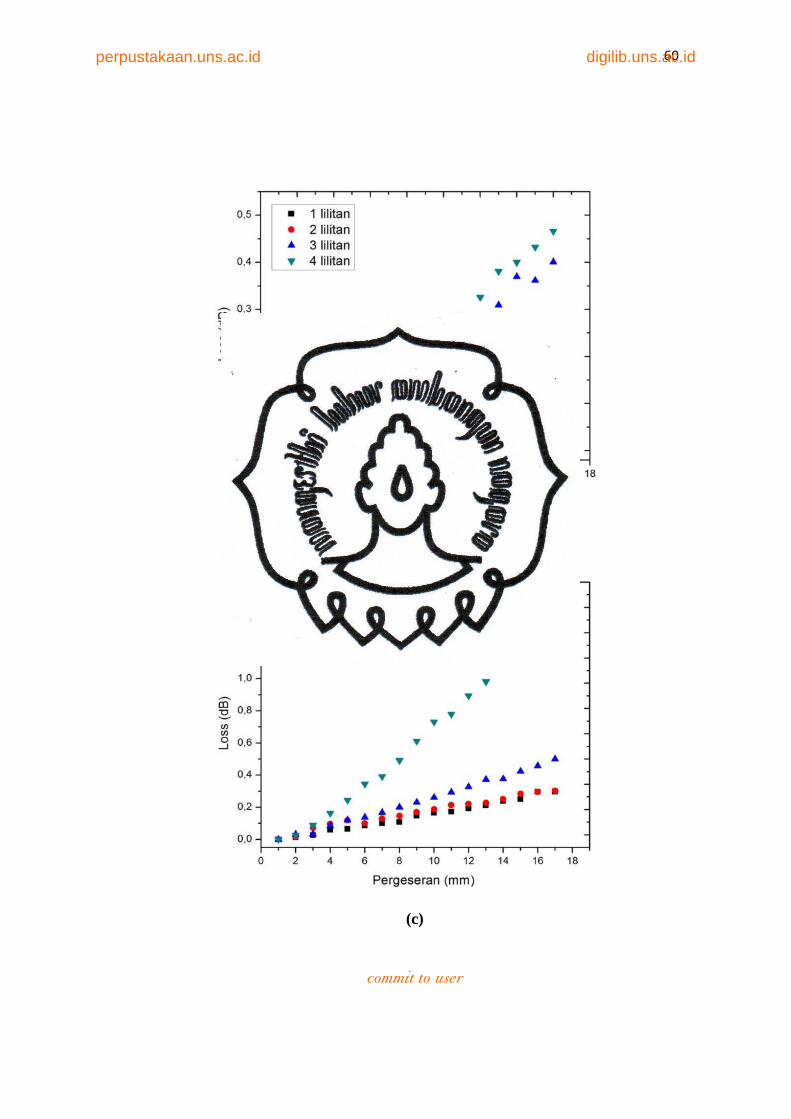
60
(b)
(c)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
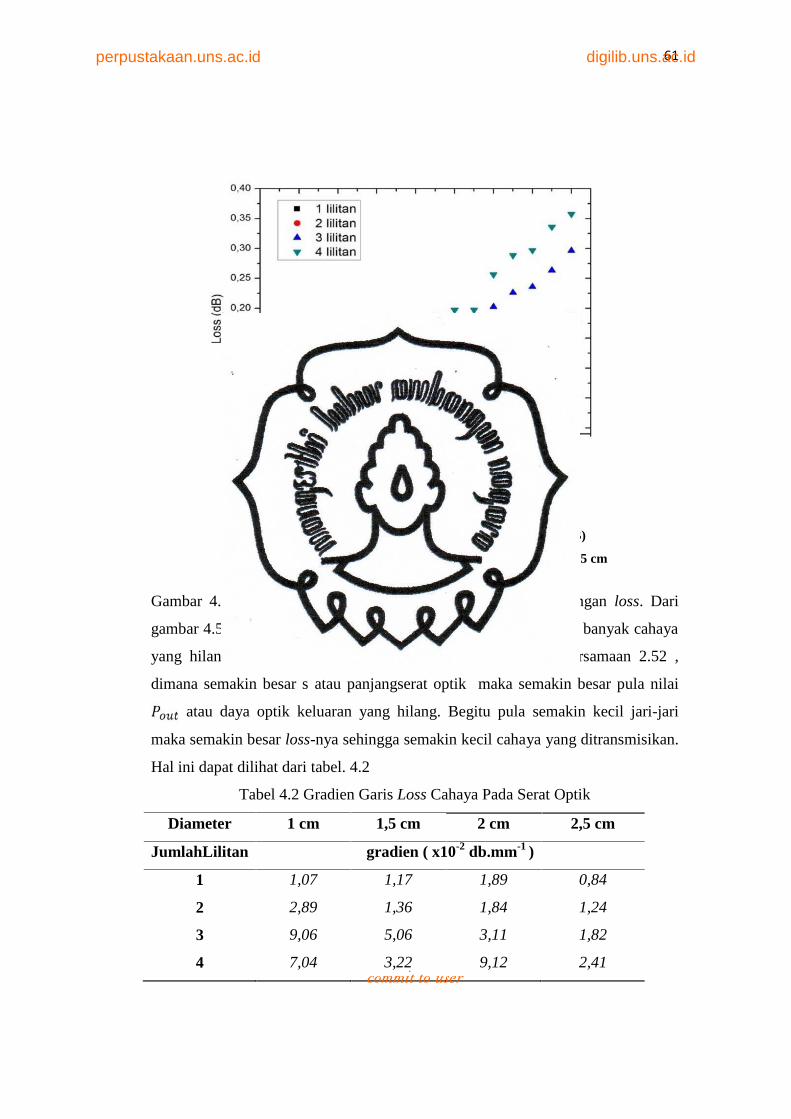
61
(d)
Gambar 4.5 Grafik Hubungan Pergeseran dengan Loss (dB)
pada Diameter Lilitan (a) 1 cm; (b) 1,5 cm; (c) 2 cm ; dan (d) 2,5 cm
Gambar 4.5 merupakan gambar grafik hubungan pergeseran dengan loss. Dari
gambar 4.5 dapat dianalisa bahwa semakin banyak lilitan semakin banyak cahaya
yang hilang atau loss semakin besar, hal ini sesuai dengan persamaan 2.52 ,
dimana semakin besar s atau panjangserat optik maka semakin besar pula nilai
atau daya optik keluaran yang hilang. Begitu pula semakin kecil jari-jari
maka semakin besar loss-nya sehingga semakin kecil cahaya yang ditransmisikan.
Hal ini dapat dilihat dari tabel. 4.2
Tabel 4.2 Gradien Garis Loss Cahaya Pada Serat Optik
Diameter 1 cm 1,5 cm 2 cm 2,5 cm
JumlahLilitan gradien ( x10-2 db.mm-1 )
1 1,07 1,17 1,89 0,84
2 2,89 1,36 1,84 1,24
3 9,06 5,06 3,11 1,82
4 7,04 3,22 9,12 2,41
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
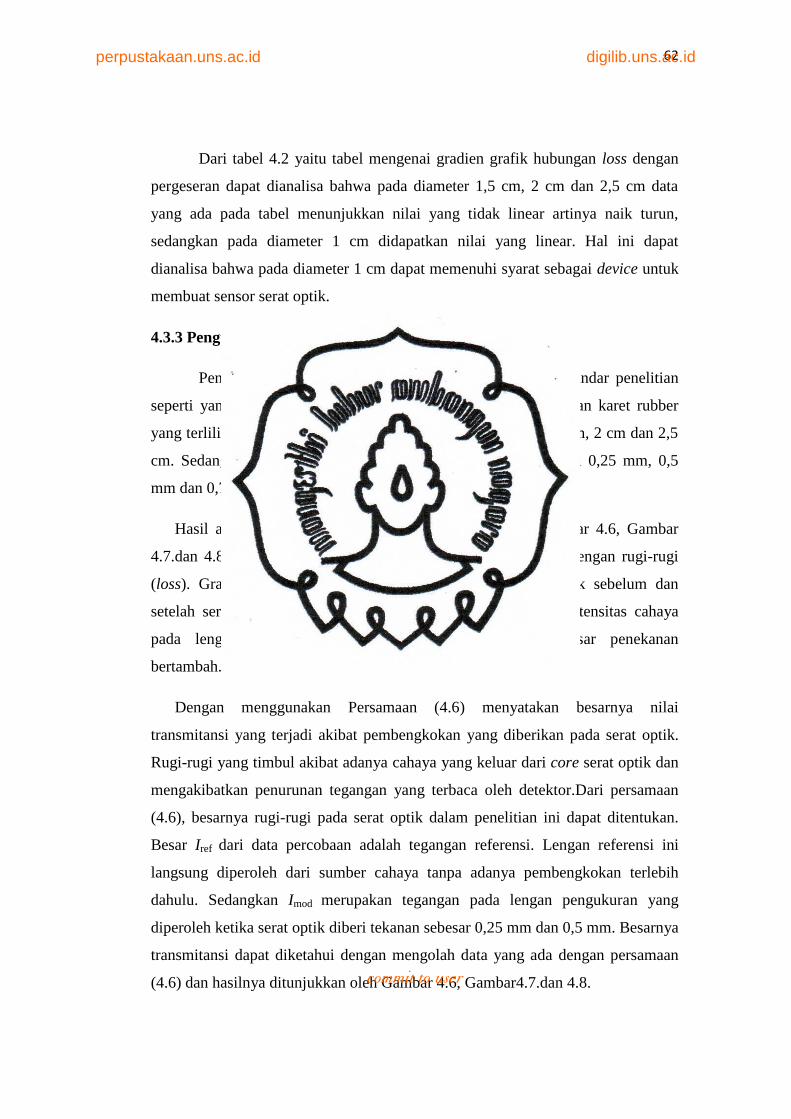
62
Dari tabel 4.2 yaitu tabel mengenai gradien grafik hubungan loss dengan
pergeseran dapat dianalisa bahwa pada diameter 1,5 cm, 2 cm dan 2,5 cm data
yang ada pada tabel menunjukkan nilai yang tidak linear artinya naik turun,
sedangkan pada diameter 1 cm didapatkan nilai yang linear. Hal ini dapat
dianalisa bahwa pada diameter 1 cm dapat memenuhi syarat sebagai device untuk
membuat sensor serat optik.
4.3.3 Pengujian Histerisis Loss pada Serat Optik yang Terlilit
Pengujian histerisis dilakukan sesuai dengan prosedur standar penelitian
seperti yang terlihat pada gambar 3.1. Lengan modulasi diberikan karet rubber
yang terlilit serat optik. Karet rubber divariasi dari diameter 1,5 cm, 2 cm dan 2,5
cm. Sedangkan pergeseran yang dikenakan menggunakan variasi 0,25 mm, 0,5
mm dan 0,75 mm.
Hasil akuisisi data pada penelitian ini disajikan pada Gambar 4.6, Gambar
4.7.dan 4.8. merupakan hubungan antara besar pergeseran (R) dengan rugi-rugi
(loss). Grafik tersebut menunjukan adanya rugi-rugi serat optik sebelum dan
setelah serat optik dibengkokkan. Hal ini ditunjukan dengan intensitas cahaya
pada lengan pengukuran mengalami penurunan ketika besar penekanan
bertambah.
Dengan menggunakan Persamaan (4.6) menyatakan besarnya nilai
transmitansi yang terjadi akibat pembengkokan yang diberikan pada serat optik.
Rugi-rugi yang timbul akibat adanya cahaya yang keluar dari core serat optik dan
mengakibatkan penurunan tegangan yang terbaca oleh detektor.Dari persamaan
(4.6), besarnya rugi-rugi pada serat optik dalam penelitian ini dapat ditentukan.
Besar Iref dari data percobaan adalah tegangan referensi. Lengan referensi ini
langsung diperoleh dari sumber cahaya tanpa adanya pembengkokan terlebih
dahulu. Sedangkan Imod merupakan tegangan pada lengan pengukuran yang
diperoleh ketika serat optik diberi tekanan sebesar 0,25 mm dan 0,5 mm. Besarnya
transmitansi dapat diketahui dengan mengolah data yang ada dengan persamaan
(4.6) dan hasilnya ditunjukkan oleh Gambar 4.6, Gambar4.7.dan 4.8.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
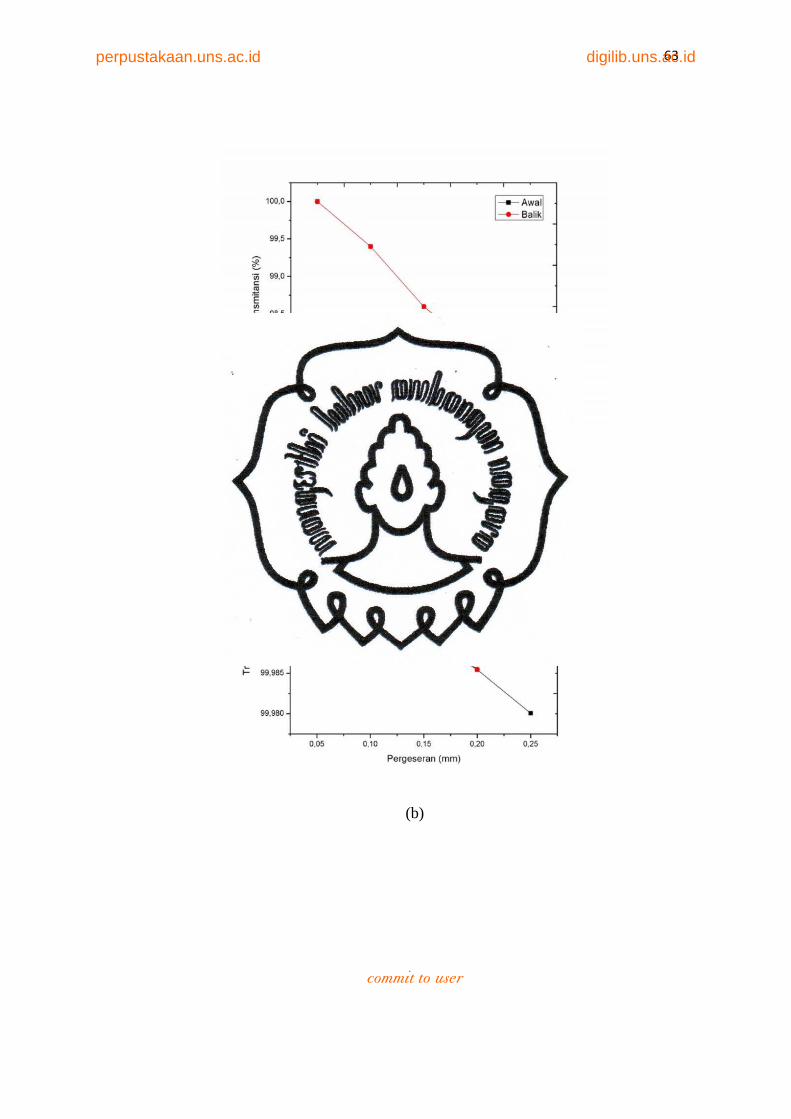
63
(a)
(b)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
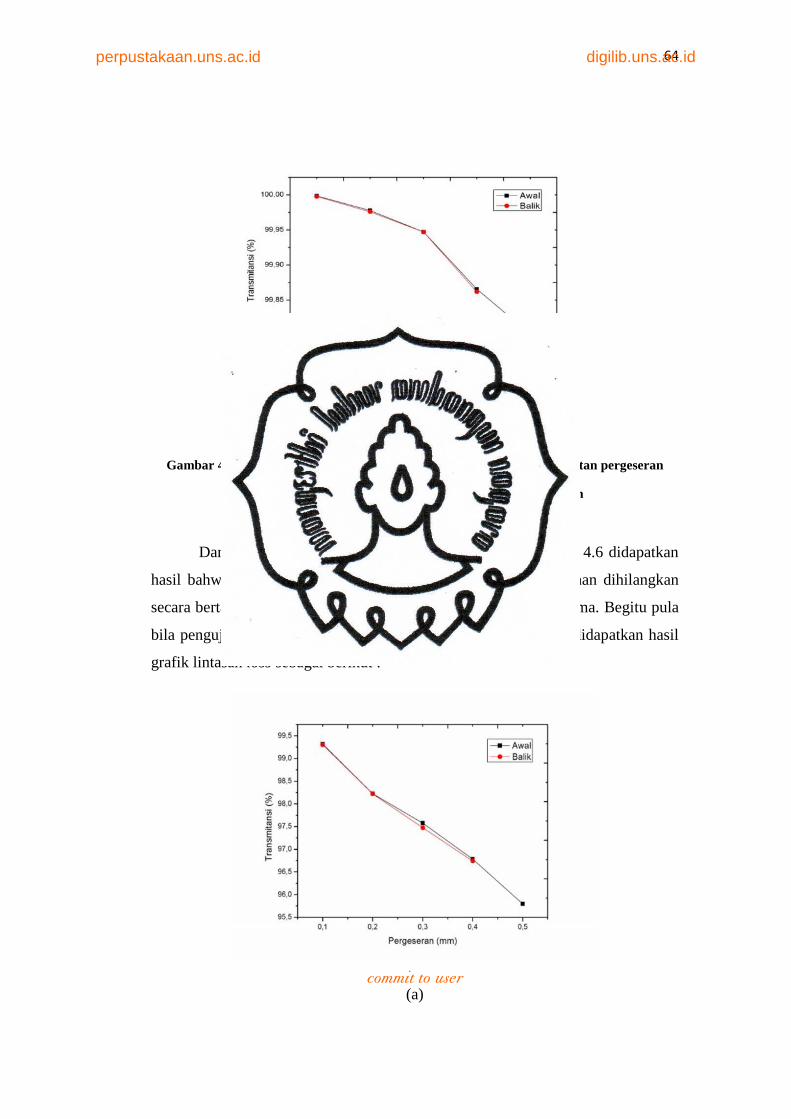
64
(c)
Gambar 4.6 grafik hubungan pergeseran dengan transmitansi pada 1 lilitan pergeseran
0,25 mm variasi diameter (a) 1,5 cm (b) 2 cm dan (c) 2,5 cm
Dari pengujian histerisis loss pada 1 lilitan sesuai gambar 4.6 didapatkan
hasil bahwa perlakuan diberi penekanan dan perlakuan penekanan dihilangkan
secara bertahap dalam batas-batas ketelitian eksperimen adalah sama. Begitu pula
bila pengujian dilakukan pada pergeseran 0,5 mm dan 0,75 mm didapatkan hasil
grafik lintasan loss sebagai berikut :
(a)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
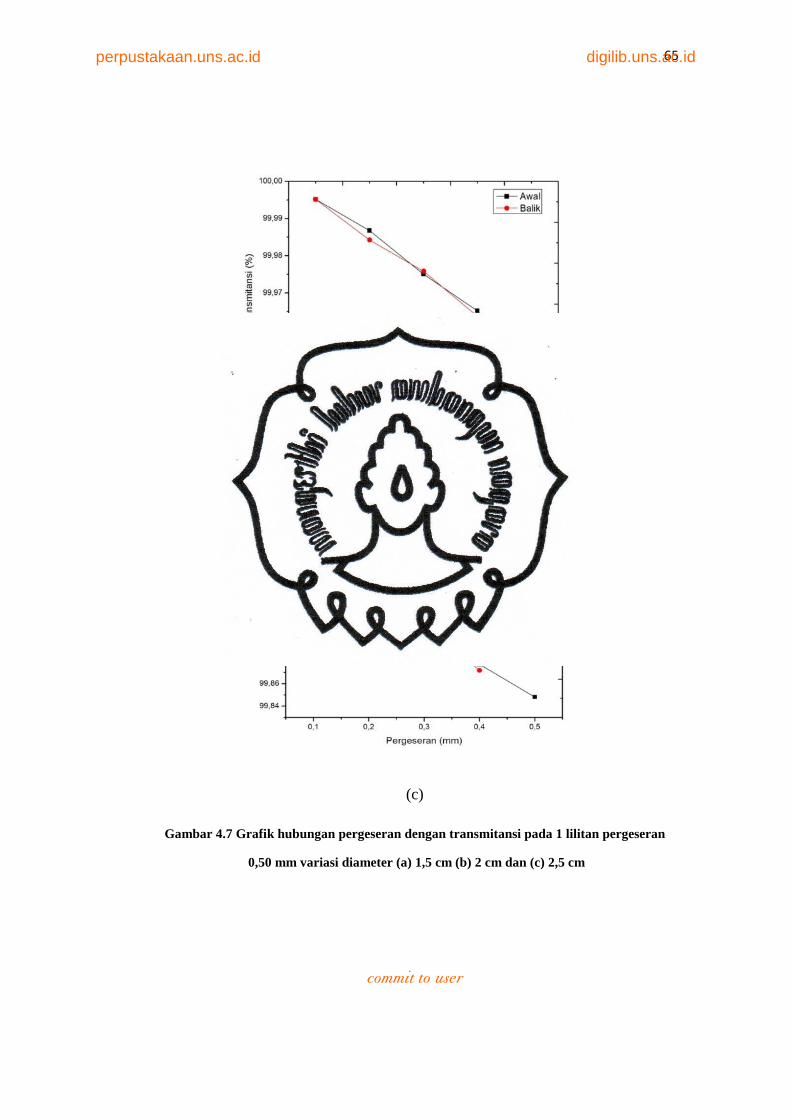
65
(b)
(c)
Gambar 4.7 Grafik hubungan pergeseran dengan transmitansi pada 1 lilitan pergeseran
0,50 mm variasi diameter (a) 1,5 cm (b) 2 cm dan (c) 2,5 cm
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
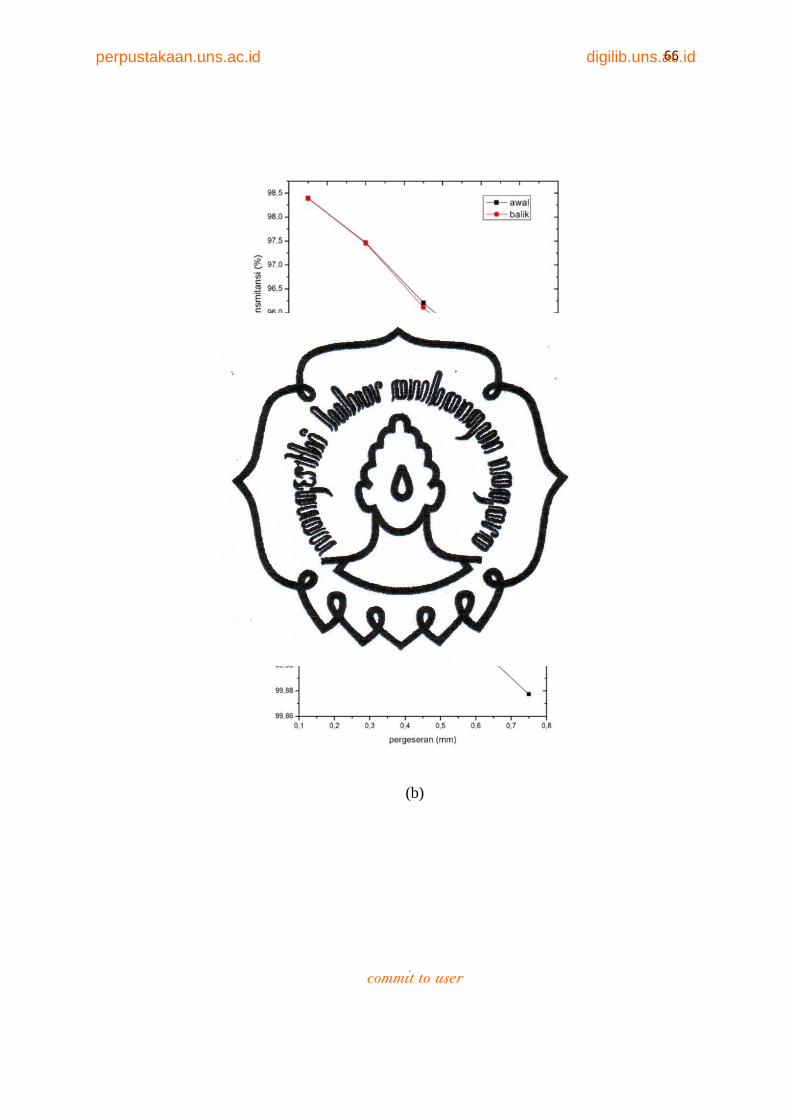
66
(a)
(b)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
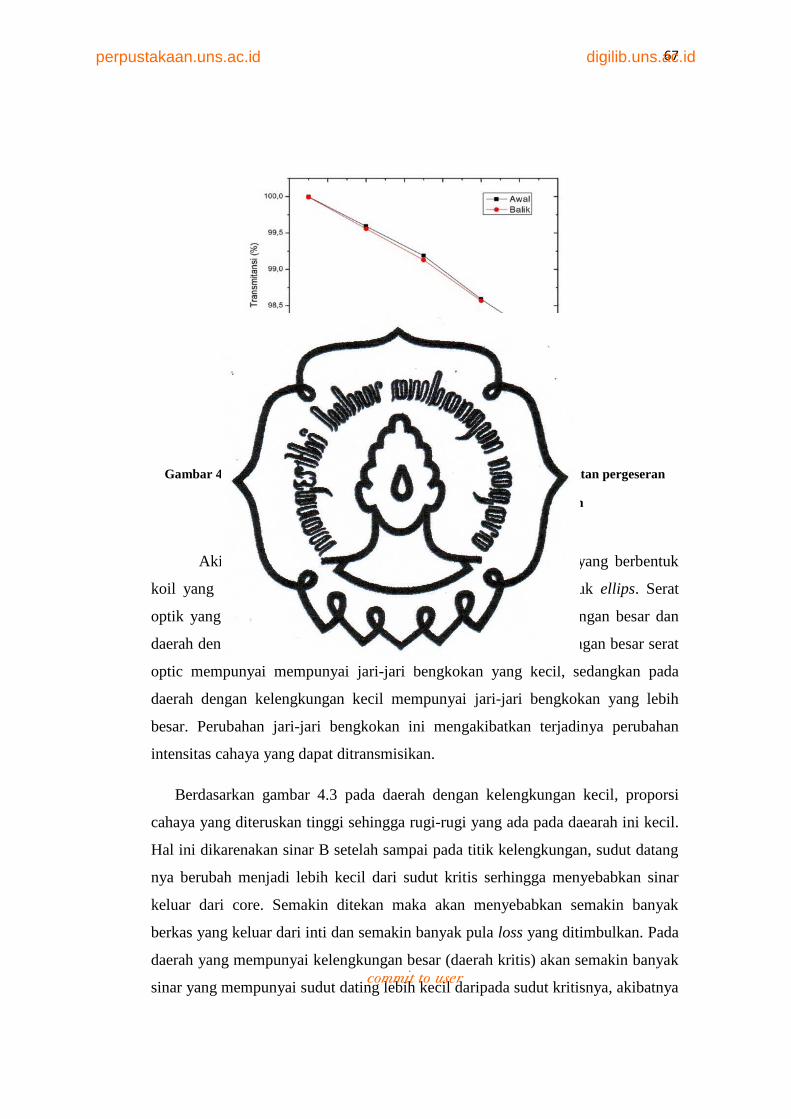
67
(c)
Gambar 4.8 Grafik hubungan pergeseran dengan transmitansi pada 1 lilitan pergeseran
0,75 mm variasi diameter (a) 1,5 cm (b) 2 cm dan (c) 2,5 cm
Akibat penekanan pada serat optik yang dililitkan karet yang berbentuk
koil yang semula berbentuk lingkaran berubah menjadi berbentuk ellips. Serat
optik yang berbentuk ellips mempunyai daerah dengan kelengkungan besar dan
daerah dengan kelengkungan kecil. Pada daerah dengan kelengkungan besar serat
optic mempunyai mempunyai jari-jari bengkokan yang kecil, sedangkan pada
daerah dengan kelengkungan kecil mempunyai jari-jari bengkokan yang lebih
besar. Perubahan jari-jari bengkokan ini mengakibatkan terjadinya perubahan
intensitas cahaya yang dapat ditransmisikan.
Berdasarkan gambar 4.3 pada daerah dengan kelengkungan kecil, proporsi
cahaya yang diteruskan tinggi sehingga rugi-rugi yang ada pada daearah ini kecil.
Hal ini dikarenakan sinar B setelah sampai pada titik kelengkungan, sudut datang
nya berubah menjadi lebih kecil dari sudut kritis serhingga menyebabkan sinar
keluar dari core. Semakin ditekan maka akan menyebabkan semakin banyak
berkas yang keluar dari inti dan semakin banyak pula loss yang ditimbulkan. Pada
daerah yang mempunyai kelengkungan besar (daerah kritis) akan semakin banyak
sinar yang mempunyai sudut dating lebih kecil daripada sudut kritisnya, akibatnya
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
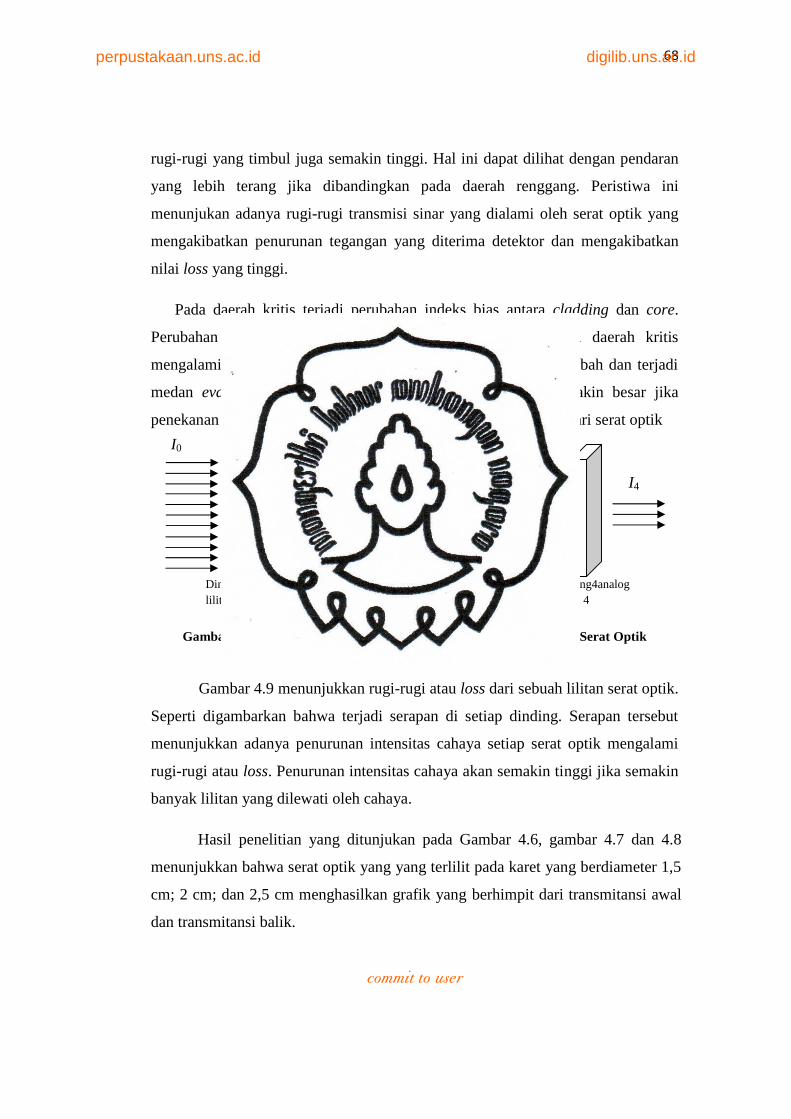
68
I1 I2 I3 I4
I0
Dinding 1 analoglilitan 1
Dinding2analoglilitan 2
Dinding3analoglilitan 3
Dinding4analoglilitan 4
rugi-rugi yang timbul juga semakin tinggi. Hal ini dapat dilihat dengan pendaran
yang lebih terang jika dibandingkan pada daerah renggang. Peristiwa ini
menunjukan adanya rugi-rugi transmisi sinar yang dialami oleh serat optik yang
mengakibatkan penurunan tegangan yang diterima detektor dan mengakibatkan
nilai loss yang tinggi.
Pada daerah kritis terjadi perubahan indeks bias antara cladding dan core.
Perubahan ini menyebabkan intensitas cahaya yang melewati daerah kritis
mengalami penurunan transmitansi karena pandu gelombang berubah dan terjadi
medan evanesence. Peristiwa ini menyebabkan loss yang semakin besar jika
penekanan dilakukan sampai mencapai ambang batas kelenturan dari serat optik
Gambar 4.9 Penggambaran Terjadinya Rugi-rugi (Loss) pada Lilitan Serat Optik
Gambar 4.9 menunjukkan rugi-rugi atau loss dari sebuah lilitan serat optik.
Seperti digambarkan bahwa terjadi serapan di setiap dinding. Serapan tersebut
menunjukkan adanya penurunan intensitas cahaya setiap serat optik mengalami
rugi-rugi atau loss. Penurunan intensitas cahaya akan semakin tinggi jika semakin
banyak lilitan yang dilewati oleh cahaya.
Hasil penelitian yang ditunjukan pada Gambar 4.6, gambar 4.7 dan 4.8
menunjukkan bahwa serat optik yang yang terlilit pada karet yang berdiameter 1,5
cm; 2 cm; dan 2,5 cm menghasilkan grafik yang berhimpit dari transmitansi awal
dan transmitansi balik.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
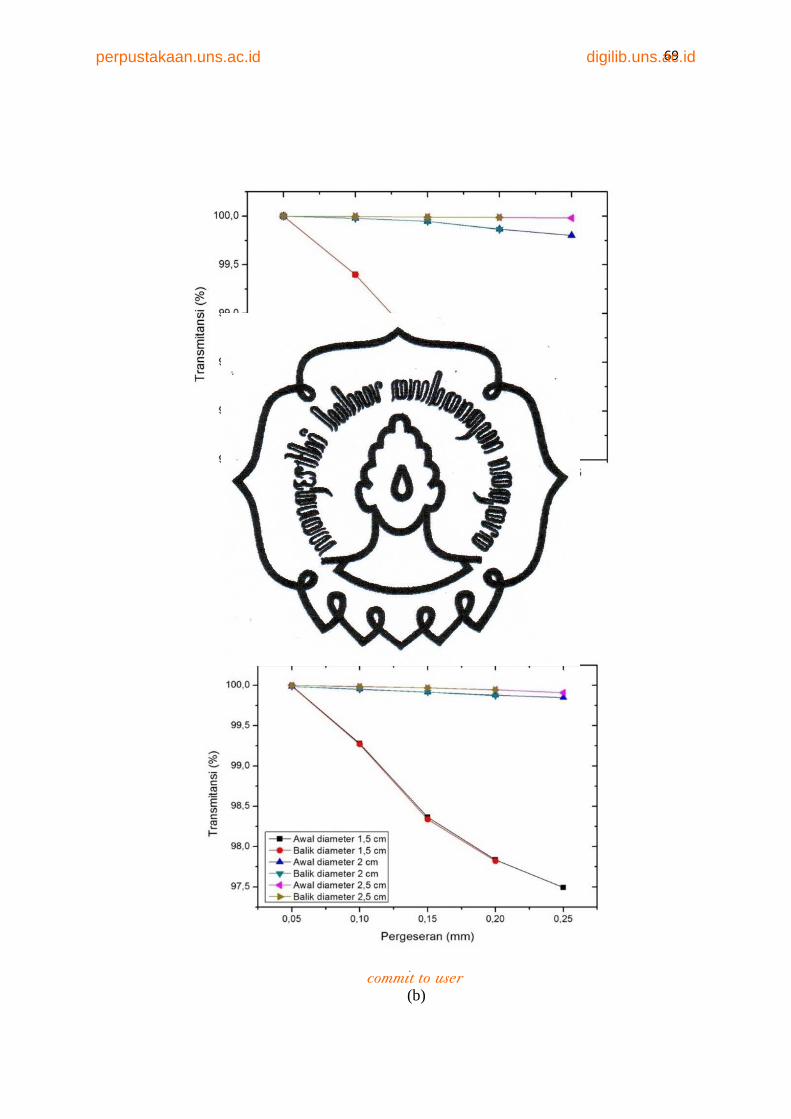
69
(a)
(b)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
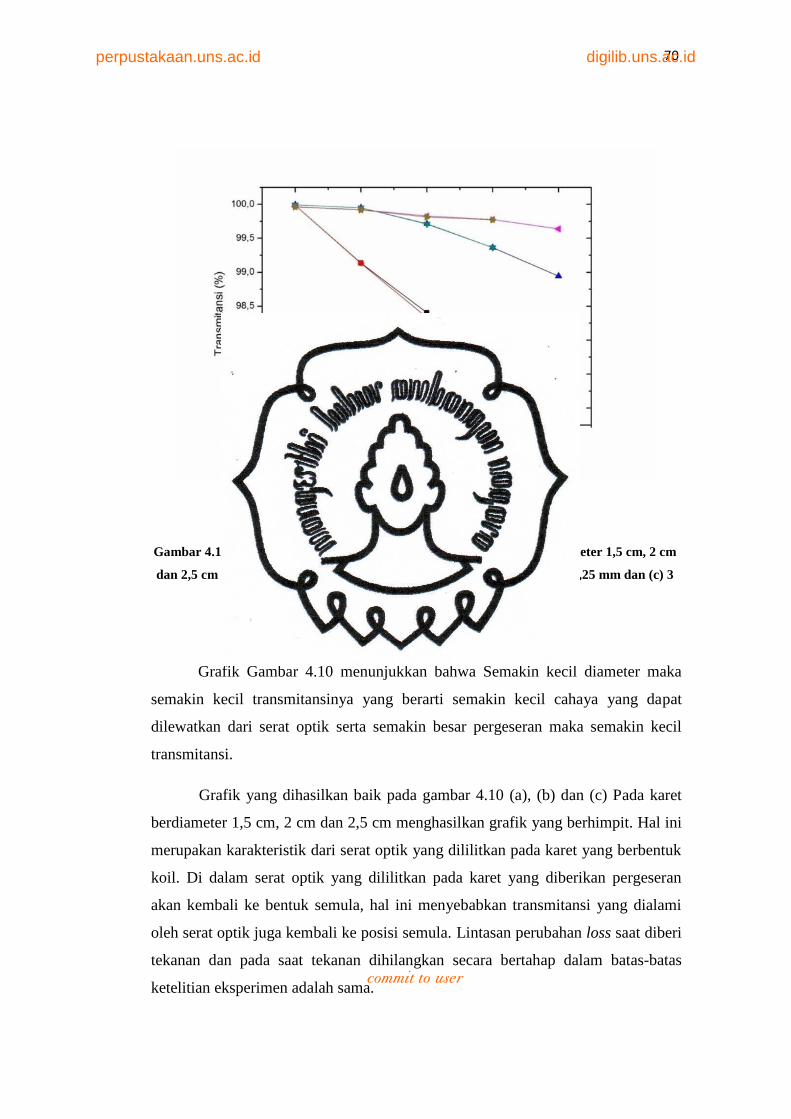
70
(c)
Gambar 4.10 Grafik hubungan pergeseran dengan transmitansi pada diameter 1,5 cm, 2 cm
dan 2,5 cm pada (a) 1 lilitan pergeseran 0,25 mm, (b) 2 lilitan pergeseran 0,25 mm dan (c) 3
lilitan pergeseran 0,25 mm
Grafik Gambar 4.10 menunjukkan bahwa Semakin kecil diameter maka
semakin kecil transmitansinya yang berarti semakin kecil cahaya yang dapat
dilewatkan dari serat optik serta semakin besar pergeseran maka semakin kecil
transmitansi.
Grafik yang dihasilkan baik pada gambar 4.10 (a), (b) dan (c) Pada karet
berdiameter 1,5 cm, 2 cm dan 2,5 cm menghasilkan grafik yang berhimpit. Hal ini
merupakan karakteristik dari serat optik yang dililitkan pada karet yang berbentuk
koil. Di dalam serat optik yang dililitkan pada karet yang diberikan pergeseran
akan kembali ke bentuk semula, hal ini menyebabkan transmitansi yang dialami
oleh serat optik juga kembali ke posisi semula. Lintasan perubahan loss saat diberi
tekanan dan pada saat tekanan dihilangkan secara bertahap dalam batas-batas
ketelitian eksperimen adalah sama.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
71
4.4. Hasil Data Pengaruh Perubahan Sinyal Akibat Pengaruh Variasi
Massa Beban Berjalan
Pengaruh perubahan sinyal akibat variasi massa beban berjalan mengenai
pada sensor serat optik merupakan salah satu tujuan dari penelitian ini. Ada
beberapa data yang didapatkan dari pengujian ini diantaranya yaitu beban dari
mobil RC yang divariasi dengan kecepatan konstan. Seperti yang terlihat sesuai
dengan gambar 3.16 dan 3.15 bahwa variasi dilakukan pada mobil RC baik
variasi beban bagian depan, tengah ataupun belakang. Selain data variasi beban
juga didapatkan data dari pengaruh sinyal keluaran pada sensor serat optik dengan
pemberian beban secara acak dengan kecepatan konstan. Data yang terakhir
adalah pengaruh tegangan keluaran atau sinyal keluaran pada sensor serat optik
dengan variasi kecepatan dengan beban tetap. Pengujian dilakukan satu persatu
dan dapat dijelaskan sebagai berikut:
4.4.1. PengujianVariasi Massa Beban Berjalan
Pengujianvariasimassa beban berjalan menggunakan mobil RC sesuai
gambar 3.15.Pengujian ini dilakukan untuk mengetahui pengaruh sinyal keluaran
akibat variasi yang dilakukan pada massa mobil RC. Sebelum dilakukan
pengujian variasi massa terlebih dahulu dilakukan pengujian sensor serat optik
dengan mobil RC kecepatan rendah. Pengujian ini dilakukan untuk menguji
kemampuan sensor serat optik dalam menerima perlakuan tekanan dari mobil RC.
Hasil pengukuran beban berjalan didapatkan grafik transmitansi secara realtime
seperti pada gambar 4.11.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
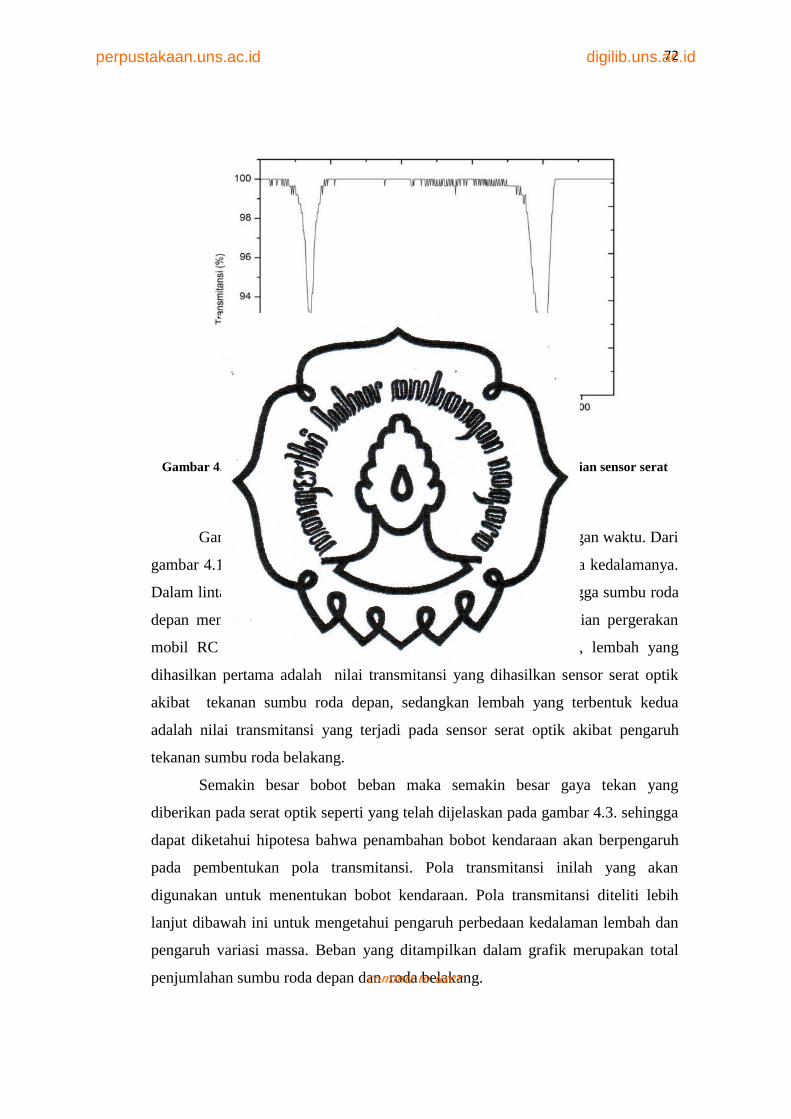
72
Gambar 4.11 Grafik hubungan transmitansi dengan waktu dalam pengujian sensor serat
optik yang diberi perlakuan penekanan mobil RC .
Gambar 4.11 merupakan grafik hubungan transmitansi dengan waktu. Dari
gambar 4.11 dapat diketahui bahwa terjadi 2 lembah yang berbeda kedalamanya.
Dalam lintasan pengujian mobil RC berjalan maju ke depan sehingga sumbu roda
depan mengenai sensor serat optik terlebih dahulu. Dari pengujian pergerakan
mobil RC tersebut dapat diketahui bahwa sesuai gambar 4.11, lembah yang
dihasilkan pertama adalah nilai transmitansi yang dihasilkan sensor serat optik
akibat tekanan sumbu roda depan, sedangkan lembah yang terbentuk kedua
adalah nilai transmitansi yang terjadi pada sensor serat optik akibat pengaruh
tekanan sumbu roda belakang.
Semakin besar bobot beban maka semakin besar gaya tekan yang
diberikan pada serat optik seperti yang telah dijelaskan pada gambar 4.3. sehingga
dapat diketahui hipotesa bahwa penambahan bobot kendaraan akan berpengaruh
pada pembentukan pola transmitansi. Pola transmitansi inilah yang akan
digunakan untuk menentukan bobot kendaraan. Pola transmitansi diteliti lebih
lanjut dibawah ini untuk mengetahui pengaruh perbedaan kedalaman lembah dan
pengaruh variasi massa. Beban yang ditampilkan dalam grafik merupakan total
penjumlahan sumbu roda depan dan roda belakang.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
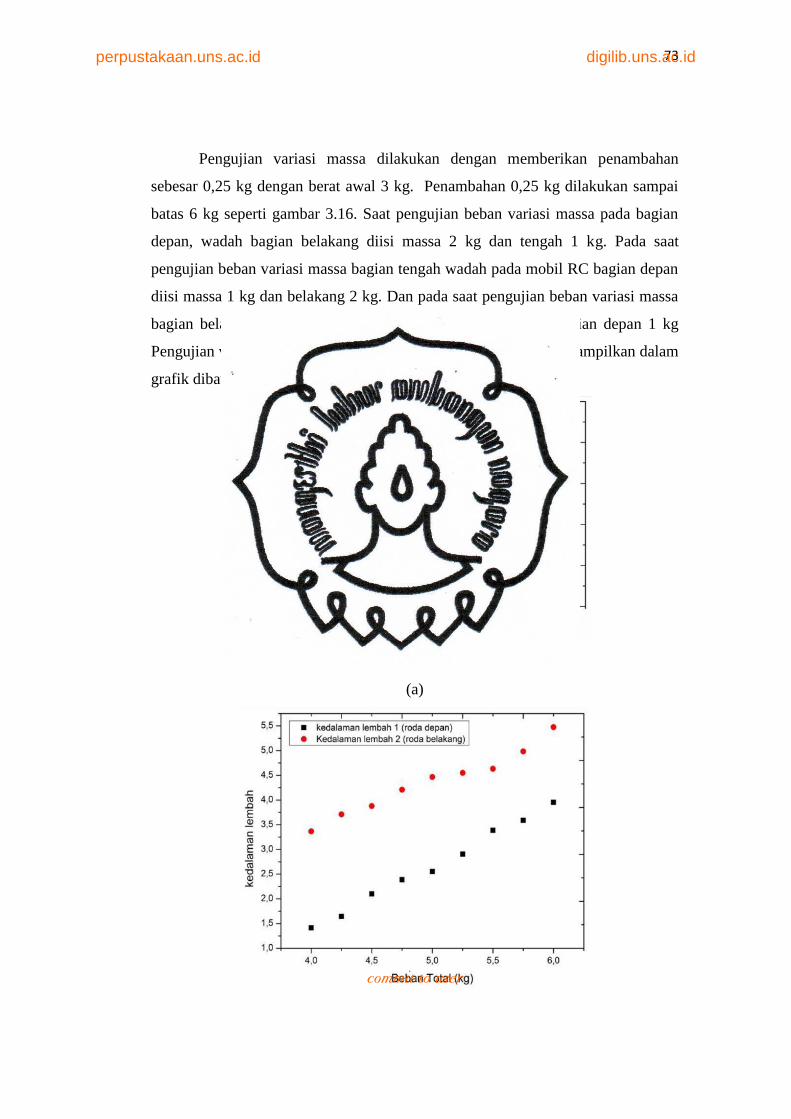
73
Pengujian variasi massa dilakukan dengan memberikan penambahan
sebesar 0,25 kg dengan berat awal 3 kg. Penambahan 0,25 kg dilakukan sampai
batas 6 kg seperti gambar 3.16. Saat pengujian beban variasi massa pada bagian
depan, wadah bagian belakang diisi massa 2 kg dan tengah 1 kg. Pada saat
pengujian beban variasi massa bagian tengah wadah pada mobil RC bagian depan
diisi massa 1 kg dan belakang 2 kg. Dan pada saat pengujian beban variasi massa
bagian belakang wadah mobil RC bagian tengah 2 kg dan bagian depan 1 kg
Pengujian variasi massa beban bagian depan, tengah dan depan ditampilkan dalam
grafik dibawah ini :
(a)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
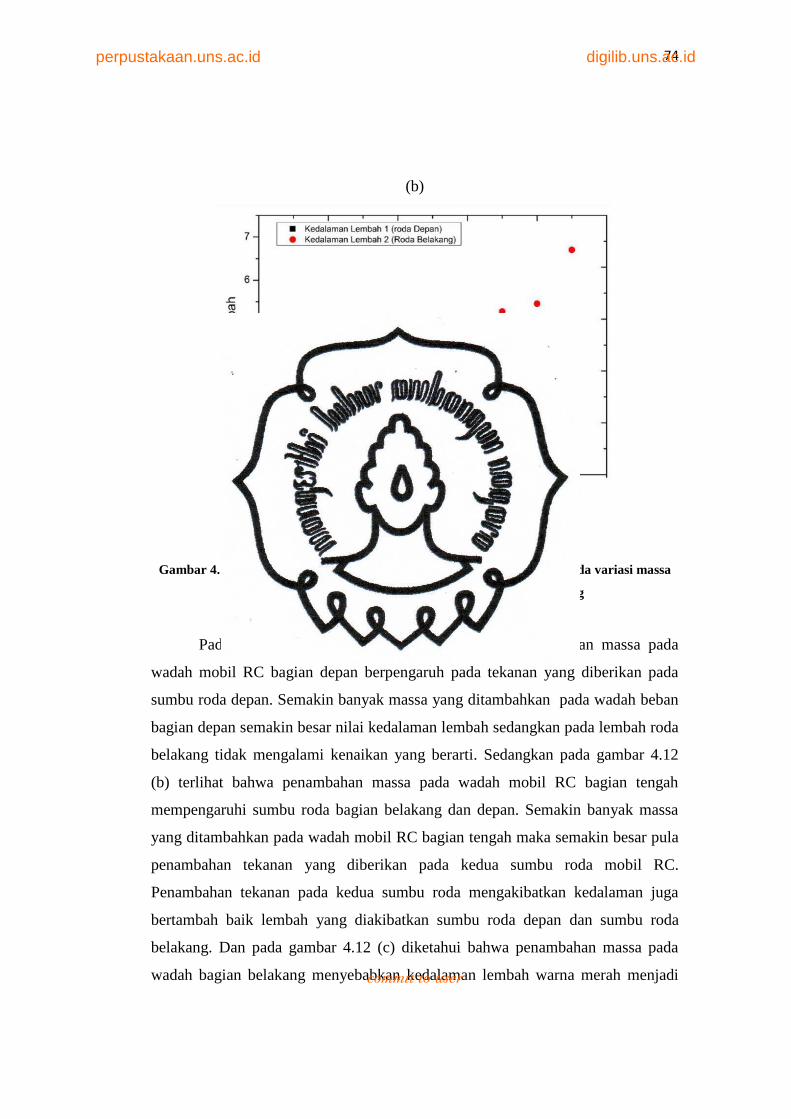
74
(b)
(c)
Gambar 4.12.Grafik hubungan beban total dengan kedalaman lembah pada variasi massa
(a) bagian depan (b) bagian tengah dan (c) bagian belakang
Pada gambar 4.12 (a) dapat diketahui bahwa penambahan massa pada
wadah mobil RC bagian depan berpengaruh pada tekanan yang diberikan pada
sumbu roda depan. Semakin banyak massa yang ditambahkan pada wadah beban
bagian depan semakin besar nilai kedalaman lembah sedangkan pada lembah roda
belakang tidak mengalami kenaikan yang berarti. Sedangkan pada gambar 4.12
(b) terlihat bahwa penambahan massa pada wadah mobil RC bagian tengah
mempengaruhi sumbu roda bagian belakang dan depan. Semakin banyak massa
yang ditambahkan pada wadah mobil RC bagian tengah maka semakin besar pula
penambahan tekanan yang diberikan pada kedua sumbu roda mobil RC.
Penambahan tekanan pada kedua sumbu roda mengakibatkan kedalaman juga
bertambah baik lembah yang diakibatkan sumbu roda depan dan sumbu roda
belakang. Dan pada gambar 4.12 (c) diketahui bahwa penambahan massa pada
wadah bagian belakang menyebabkan kedalaman lembah warna merah menjadi
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
75
bertambah dan kedalaman lembah roda depan atau lembah warna hitam tidak
mengalami penambahan yang berarti. Hal ini disebabkan tekanan oleh beban pada
sumbu belakang roda mobil RC yang berepengaruh pada tekanan pada sensor
serat optik sehingga transmitansi turun.
Data kedalaman lembah antara roda depan dan belakang kemudian
dijumlahkan untuk bisa mengetahui total nilai kedalaman lembah antara roda
depan dan belakang. Grafik hubungan beban total dengan jumlah kedalaman
lembah ditunjukkan pada gambar 4.13
(a)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
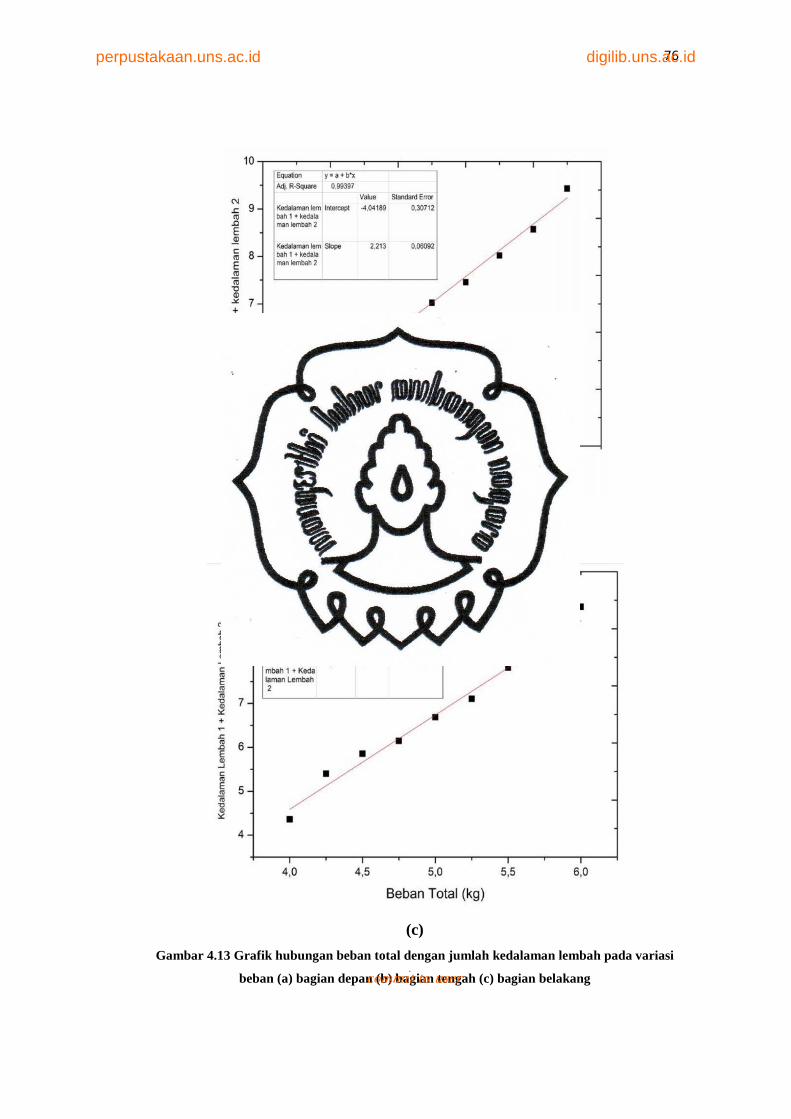
76
(b)
(c)
Gambar 4.13 Grafik hubungan beban total dengan jumlah kedalaman lembah pada variasi
beban (a) bagian depan (b) bagian tengah (c) bagian belakang
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
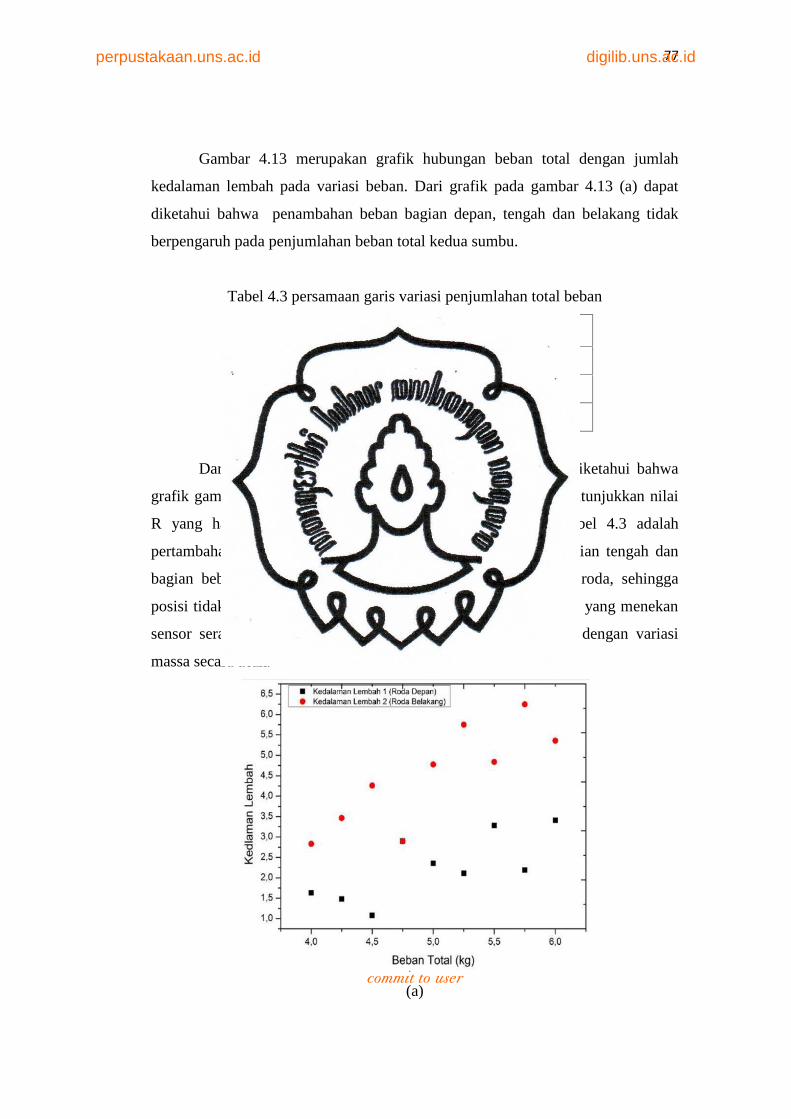
77
Gambar 4.13 merupakan grafik hubungan beban total dengan jumlah
kedalaman lembah pada variasi beban. Dari grafik pada gambar 4.13 (a) dapat
diketahui bahwa penambahan beban bagian depan, tengah dan belakang tidak
berpengaruh pada penjumlahan beban total kedua sumbu.
Tabel 4.3 persamaan garis variasi penjumlahan total beban
Posisivariasi PersamaanGaris R2
Depan y = 2,2554x - 4,47156 0,96554
Belakang y = 2,15007x - 4,013 0,97553
Tengah y = 2,213x - 4,04189 0,99397
Dari tabel 4.3 tentang variasi penjumlahan total beban diketahui bahwa
grafik gambar 4.13 mempunyai keliniearitas yang baik. Hal ini ditunjukkan nilai
R yang hampir sama. Analisa dari persamaan garis pada tabel 4.3 adalah
pertambahan jumlah beban baik pertambahan bagian depan, bagian tengah dan
bagian beban mempunyai kesamaan penekanan kepada sumbu roda, sehingga
posisi tidak terlalu berpengaruh terhadap penjumlahan beban total yang menekan
sensor serat optik. Hal ini dibuktikan dengan pengujian beban dengan variasi
massa secara acak.
(a)
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
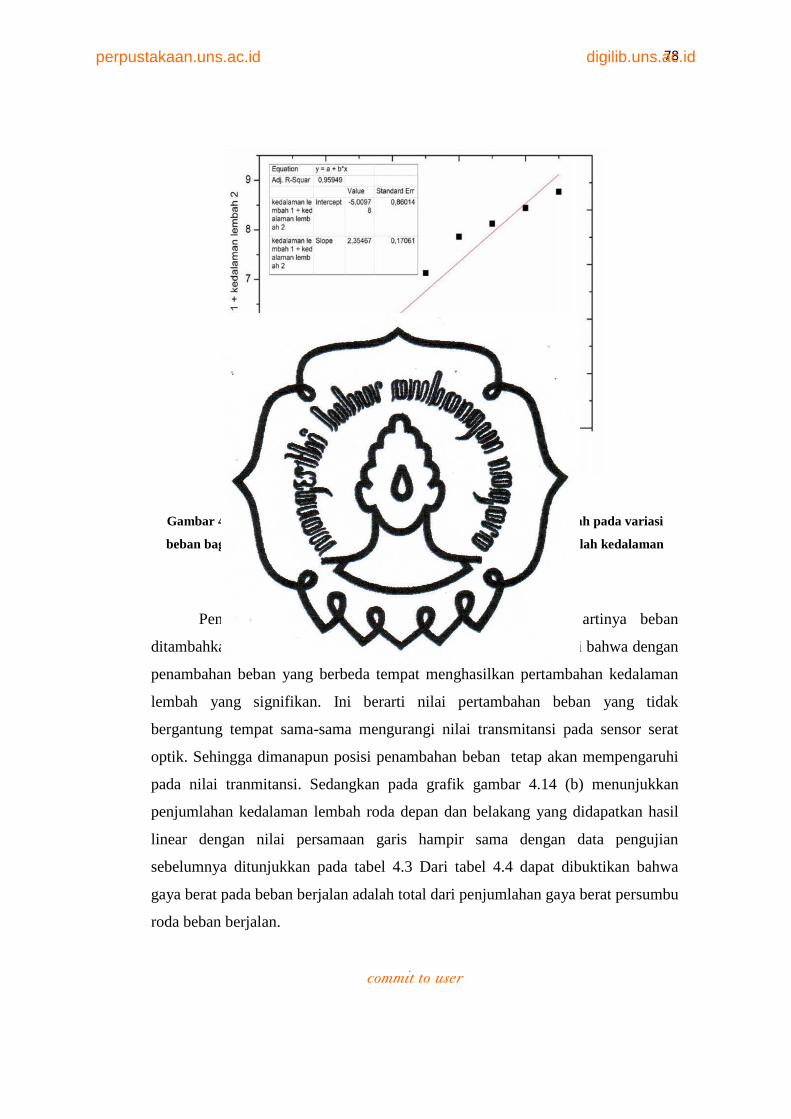
78
(b)
Gambar 4.14. (a) Grafik hubungan beban total dengan kedalaman lembah pada variasi
beban bagian belakang dan (b)Grafik hubungan beban total dengan jumlah kedalaman
lembah pada variasi beban bagian belakang.
Pengujian beban dengan variasi massa yang acak artinya beban
ditambahkan tidak pada satu tempat. Pada grafik 4.14 (a) diketahui bahwa dengan
penambahan beban yang berbeda tempat menghasilkan pertambahan kedalaman
lembah yang signifikan. Ini berarti nilai pertambahan beban yang tidak
bergantung tempat sama-sama mengurangi nilai transmitansi pada sensor serat
optik. Sehingga dimanapun posisi penambahan beban tetap akan mempengaruhi
pada nilai tranmitansi. Sedangkan pada grafik gambar 4.14 (b) menunjukkan
penjumlahan kedalaman lembah roda depan dan belakang yang didapatkan hasil
linear dengan nilai persamaan garis hampir sama dengan data pengujian
sebelumnya ditunjukkan pada tabel 4.3 Dari tabel 4.4 dapat dibuktikan bahwa
gaya berat pada beban berjalan adalah total dari penjumlahan gaya berat persumbu
roda beban berjalan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
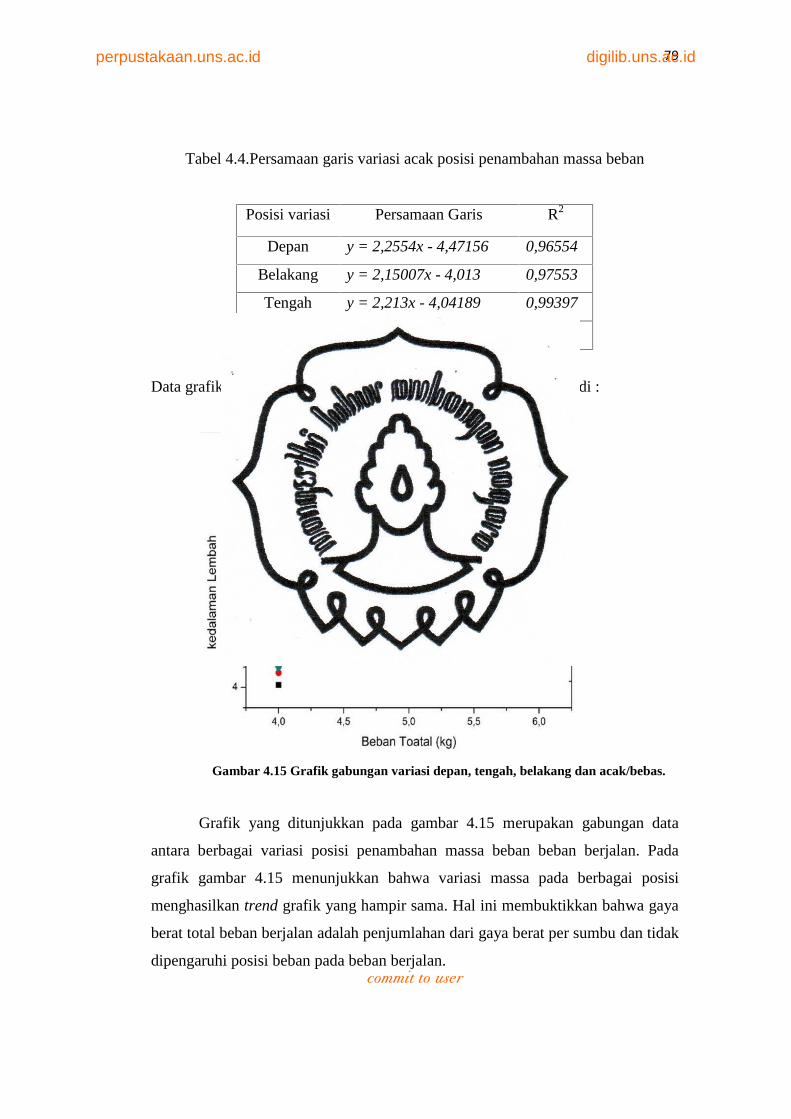
79
Tabel 4.4.Persamaan garis variasi acak posisi penambahan massa beban
Posisi variasi Persamaan Garis R2
Depan y = 2,2554x - 4,47156 0,96554
Belakang y = 2,15007x - 4,013 0,97553
Tengah y = 2,213x - 4,04189 0,99397
Acak y = 2,35467x - 5,00978 0,95949
Data grafik gambar 4.14 dapat digabung menjadi satu grafik menjadi :
Gambar 4.15 Grafik gabungan variasi depan, tengah, belakang dan acak/bebas.
Grafik yang ditunjukkan pada gambar 4.15 merupakan gabungan data
antara berbagai variasi posisi penambahan massa beban beban berjalan. Pada
grafik gambar 4.15 menunjukkan bahwa variasi massa pada berbagai posisi
menghasilkan trend grafik yang hampir sama. Hal ini membuktikkan bahwa gaya
berat total beban berjalan adalah penjumlahan dari gaya berat per sumbu dan tidak
dipengaruhi posisi beban pada beban berjalan.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
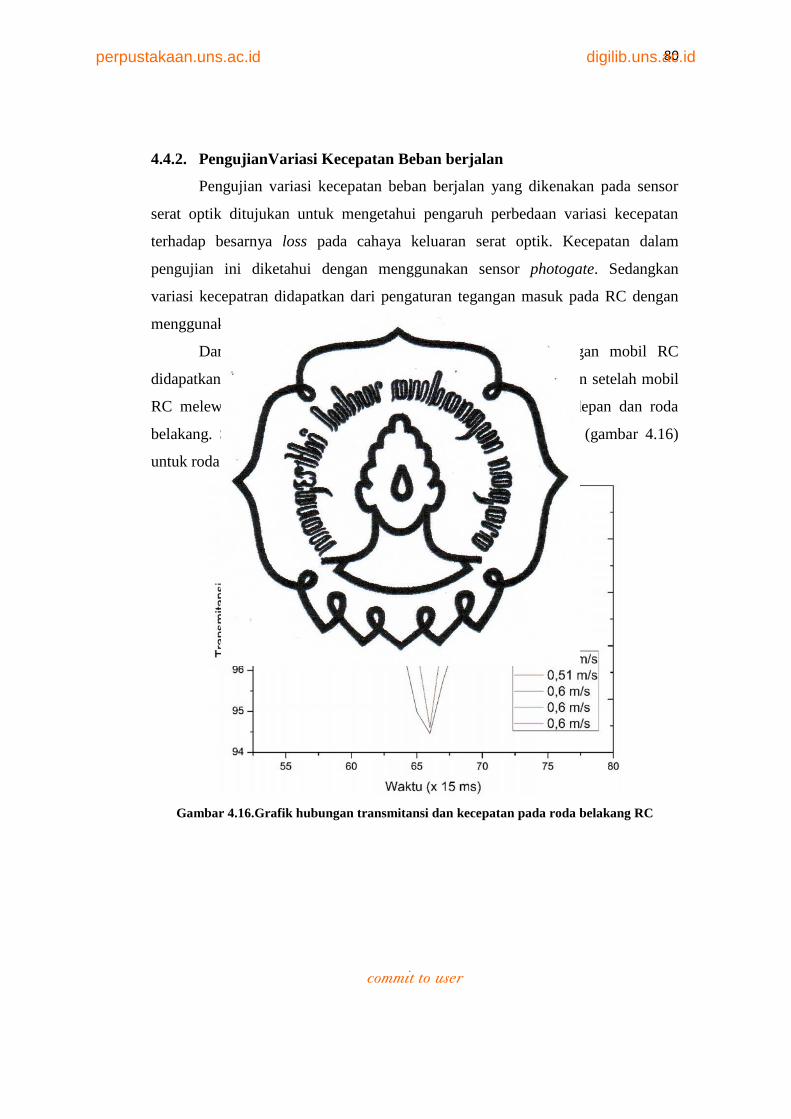
80
4.4.2. PengujianVariasi Kecepatan Beban berjalan
Pengujian variasi kecepatan beban berjalan yang dikenakan pada sensor
serat optik ditujukan untuk mengetahui pengaruh perbedaan variasi kecepatan
terhadap besarnya loss pada cahaya keluaran serat optik. Kecepatan dalam
pengujian ini diketahui dengan menggunakan sensor photogate. Sedangkan
variasi kecepatran didapatkan dari pengaturan tegangan masuk pada RC dengan
menggunakan power supply.
Dari pengujian variasi kecepatan yang dilakukan dengan mobil RC
didapatkan data nilai transmitansi dan kecepatan. Data didapatakan setelah mobil
RC melewati sensor serat optik. Mobil RC melewatkan roda depan dan roda
belakang. Setelah diolah menggunakan origin didapatkan grafik (gambar 4.16)
untuk roda belakang dan grafik (gambar 4.17) untuk roda depan.
Gambar 4.16.Grafik hubungan transmitansi dan kecepatan pada roda belakang RC
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
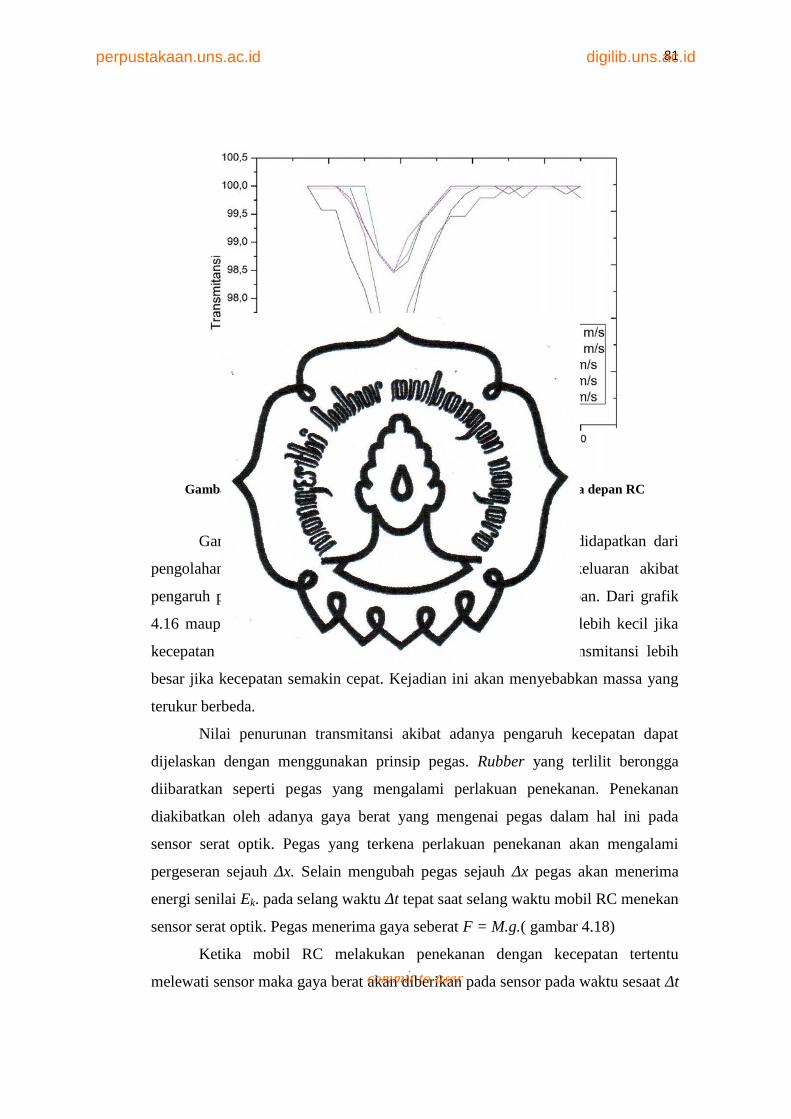
81
Gambar 4.17.Grafik hubungan transmitansi dan kecepatan pada roda depan RC
Gambar 4.16 dan gambar 4.17 merupakan garfik yang didapatkan dari
pengolahan data transmitansi yang didapatkan dari cahaya keluaran akibat
pengaruh penekanan yang dilakukan roda belakang dan roda depan. Dari grafik
4.16 maupun 4.17 dapat dianalisa bahwa nilai tranmitansi akan lebih kecil jika
kecepatan semakin lambat pada beban yang sama.dan nilai transmitansi lebih
besar jika kecepatan semakin cepat. Kejadian ini akan menyebabkan massa yang
terukur berbeda.
Nilai penurunan transmitansi akibat adanya pengaruh kecepatan dapat
dijelaskan dengan menggunakan prinsip pegas. Rubber yang terlilit berongga
diibaratkan seperti pegas yang mengalami perlakuan penekanan. Penekanan
diakibatkan oleh adanya gaya berat yang mengenai pegas dalam hal ini pada
sensor serat optik. Pegas yang terkena perlakuan penekanan akan mengalami
pergeseran sejauh Δx. Selain mengubah pegas sejauh Δx pegas akan menerima
energi senilai Ek. pada selang waktu Δt tepat saat selang waktu mobil RC menekan
sensor serat optik. Pegas menerima gaya seberat F = M.g.( gambar 4.18)
Ketika mobil RC melakukan penekanan dengan kecepatan tertentu
melewati sensor maka gaya berat akan diberikan pada sensor pada waktu sesaat Δt
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
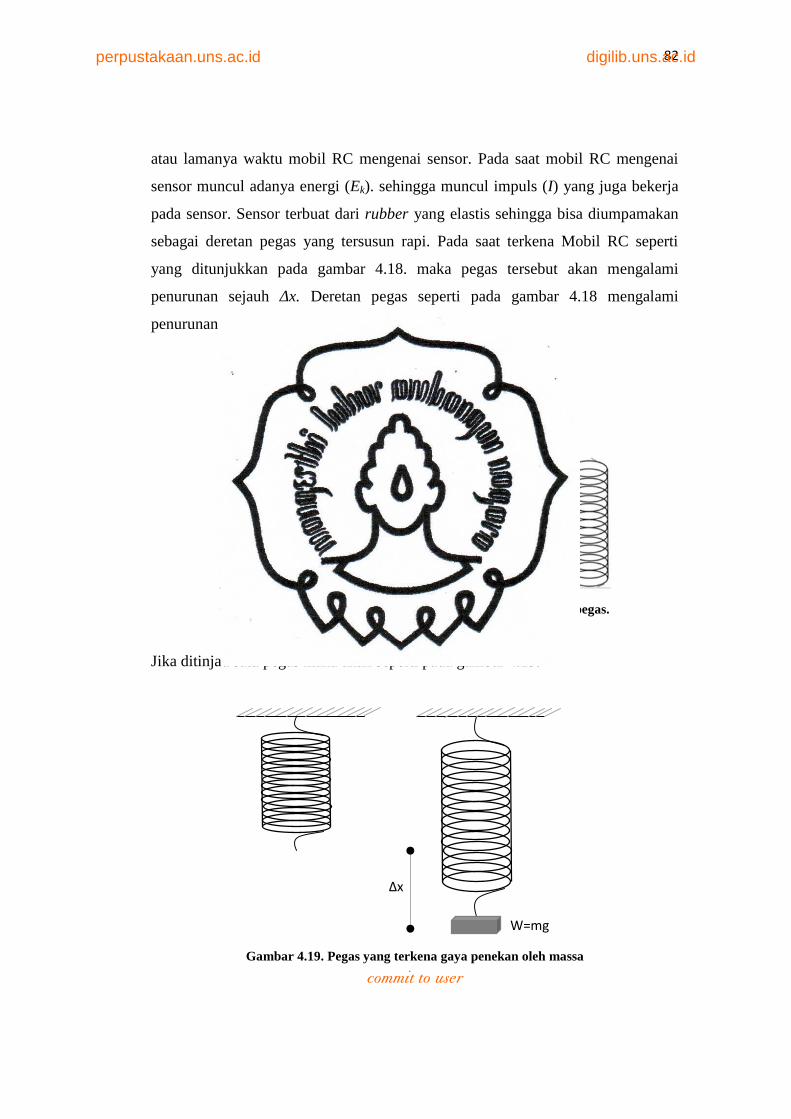
82
atau lamanya waktu mobil RC mengenai sensor. Pada saat mobil RC mengenai
sensor muncul adanya energi (Ek). sehingga muncul impuls (I) yang juga bekerja
pada sensor. Sensor terbuat dari rubber yang elastis sehingga bisa diumpamakan
sebagai deretan pegas yang tersusun rapi. Pada saat terkena Mobil RC seperti
yang ditunjukkan pada gambar 4.18. maka pegas tersebut akan mengalami
penurunan sejauh Δx. Deretan pegas seperti pada gambar 4.18 mengalami
penurunan sesuai dengan gaya yang diterimanya.
Gambar 4.18. rubber silicone yang dipandang sebagai deretan pegas.
Jika ditinjau satu pegas maka akan seperti pada gambar 4.19.
Gambar 4.19. Pegas yang terkena gaya penekan oleh massa
Δx
W=mg
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
83
Gambar 4.19 menjelaskan bahwa pegas yang semula normal akan berkurang
sejauh Δx jika mengalami penekanan senilai F=m.g. Ketika gaya diberikan pada
pegas, energi kinetik beban (Ek) diubah menjadi energi potensial pegas (Ep).
Sehingga
Ek = Ep (4.7)
= k Δx2 (4.8)
Dimana P adalah momentum ketika beban mengenai pegas.Momentum akibat
adanya impuls yang dapat dirumuskan := . (4.9)
Sehingga dengan persamaan (4.8) dimasukkan kedalam persamaan (4.9) menjadi( )= k Δx2 (4.10)
= k Δx2 (4.11)
Δx = Δt (4.12)
Dari persamaan 4.12 dapat dijelaskan bahwa nilai Δt menunjukkan waktu dimana
pegas atau sensor serat optik terkena penekanan oleh mobil RC. Semakin lama
penekanan maka Δx akan bernilai maksimal sehingga menyebabkan nilai
transmitansi yang didapatkan semakin besar. Hal ini sesuai dengan rumus
kecepatan yaitu dimana := (4.13)
Nilai Δx dalam hal ini diasumsikan pada pergeseran Δd. Kecepatan akan
berbanding terbalik terhadap waktu. Sehingga jika kecepatan divariasi maka akan
terjadi perubahan waktu sentuh terhadap sensor serat optik yang terlihat dari
perubahan niali transmitansi.
Pengujian variasi beban dengan kecepatan 1 dan dibandingkan dengan
kecepatan 2. Grafik perbandingan tersebut ditunjukkan pada gambar 4.20.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
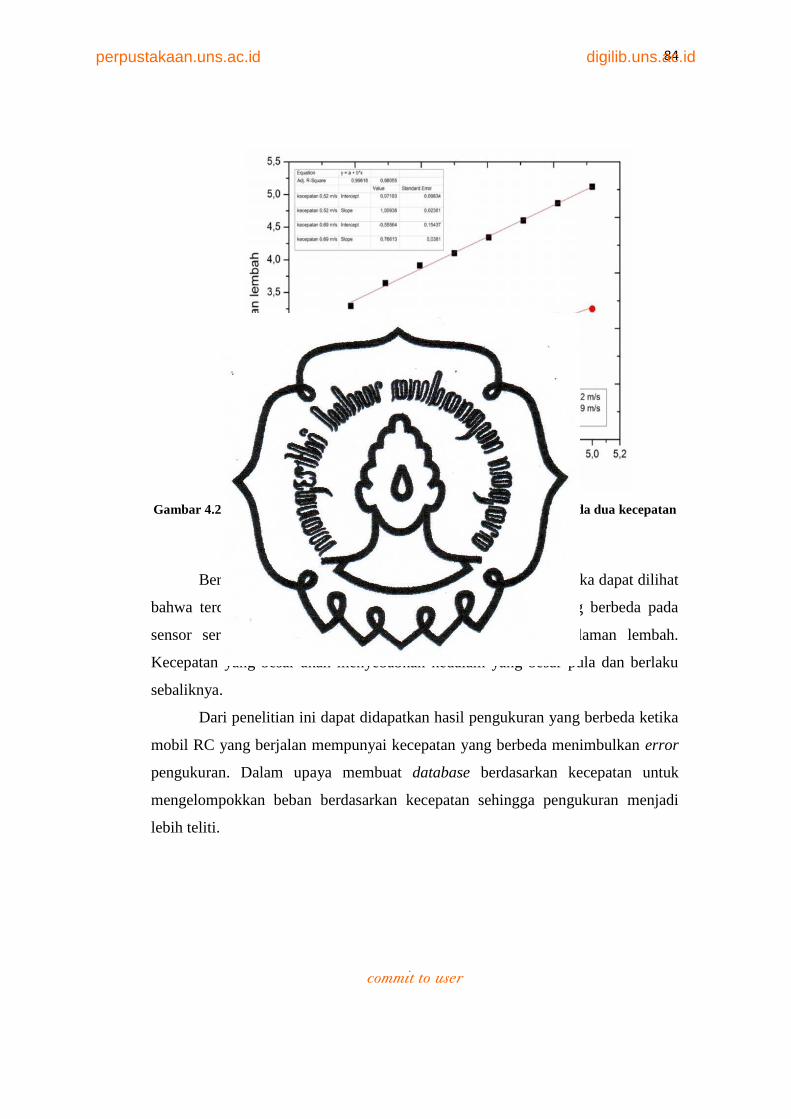
84
Gambar 4.20. Grafik hubungan Beban total dengan kedalaman lembah pada dua kecepatan
yang berbeda
Berdasarkan grafik yang ditunjukkan pada gambar 4.20 maka dapat dilihat
bahwa terdapat perbedaan grafik jika dikenakan kecepatan yang berbeda pada
sensor serat optik hal itu ditunjukkan pada perbedaan kedalaman lembah.
Kecepatan yang besar akan menyebabkan kedalam yang besar pula dan berlaku
sebaliknya.
Dari penelitian ini dapat didapatkan hasil pengukuran yang berbeda ketika
mobil RC yang berjalan mempunyai kecepatan yang berbeda menimbulkan error
pengukuran. Dalam upaya membuat database berdasarkan kecepatan untuk
mengelompokkan beban berdasarkan kecepatan sehingga pengukuran menjadi
lebih teliti.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
85
BAB V
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari hasil penelitian yang telah dilakukan dapat diambil kesimpulan bahwa :
1. Penelitian Sensor Weigh in Motion (WIM) dapat dilakukan dengan
menggunakan serat optik yang dililitkan pada rubber dimana dari
pengujian histerisis loss pada serat optik yang dililitkan pada rubber
menghasilkan nilai perubahan loss pada saat diberi tekanan dan saat
tekanan dihilangkan secara bertahap dalam batas-batas ketelitian
eksperimen adalah sama.
2. Pengaruh perubahan kecepatan terhadap perubahan intensitas cahaya
dalam penelitian ini yaitu semakin besar kecepatan maka nilai perubahan
transmitansi akan semakin kecil dan semakin kecil kecepatan akan
menyebabkan perubahan nilai transmitansi semakin besar serta posisi
penempatan beban tidak mempengaruhi nilai total gaya berat tetapi beban
yang diberikan pada kendaraan yang berjalan akan terdistribusi secara
merata pada masing-masing sumbu roda kendaraan. Sedangkan posisi
penempatan akan mempengaruhi persentase berat yang terdistribusi pada
masing-masing sumbu kendaraan.
5.2. Saran
Pada pengembangan lebih lanjut dari penelitian ini, dapat disarankan
beberapa hal :
1. Penggunaan elastomer yang lebih keras dikarenakan pada penerapan real di
lapangan akan mempengaruhi database yang real terukur. Penggunanan
database terutama database kecepatan akan menghasilkan sensor pengukuran
beban berjalan menjadi semakin akurat.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
86
DAFTAR PUSTAKA
Arumugam M., 2001, “Optical fiber communication”. Pramana Journal of
Physics, vol 57, nos 5&6, pp 849-869.
Batenko A., Berzins G., Grakovski A., Kabashkin I., Petersons E., Sikerzhicki Y..
2011. Problems of fibre optic sensor application In weight-in-motion
(wim) systems. Transport and Telecommunication Institute, Lomonosova
1, LV-1019, Riga, Latvia p. 311-316. ISBN 978-9984-818-46-7
Cheng L., Zhang H. dan Li Q.. “Design og capasitive flexible weighing sensor for
vehicle WIM System”. Sensors, vol 7, pp 1530-1544, 2007.
Cottrel, B. 1992. Final Report of Evaluation of Weight in Motion System, Nat.
Tech, New York.
Crisp J. dan Elliot B., Introduction to Fiber Optics, 3rd Edition. Elsevier, 2005.
Decusatis, C.M., & Decusatis, C.J.S. (2006). Fiber Optic Essentials. USA:Academic Press.
Direktorat Jendral Perhubungan Darat. 1997. Petunjuk Teknis Penyelenggaraan
Perlengkapan Jalan. Departemen Perhubungan Direktorat Jendral
Perhubungan Darat, Jakarta.
Domanski, A.W., Poczęsny, T., Prokopczuk, K., & Makowski, P. 2010. An
Optical Fiber Loop Sensor For Vibration Monitoring.Photonics Letters Of
Poland, 2(2), 58-60.
Farrell, G. 2002. Optical Communication System. Institute of Technology. Dublin.
Fidanboylu, K. dan Efendioğlu, H. S.. 2009. Fiber Optic Sensors and Their
Applications. 5th International Advanced Technologies Symposium
(IATS’09), May 13-15, 2009, Karabuk, Turkey, Hal 1-6.
Gambling, W.A., Matsumura, H., Ragdale, C.M. 1978. Curvature and
microbending Losses in Single-Mode optical fibres. Optical and Quantum
Electronics, 11, 43-59
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
87
Griffiths, D. J. (1981). Introduction to electrodynamic (3 ed.). New jersey:
Prentice hall.
Keiser G., 2000, Optical Fiber Communication, Mc Graw-Hill Publishing
Company. Singapore.
Kollipara V. D., 2013.A rheology Model of Soft Elastomeric Capasitor For Weigh
In Motion Aplication. Digital Repository Iowa State University. Ames,
Iowa , USA.
Lei, Y., Shu-Qin, L. dan Shui-Sheng, J. 2009. Analysis and Simulation of
Adiabatic Bend Transitions in Optical Fibers. CHIN. PHYS. LETT., 26,
074213-1-4
Liu, C.S., Cou, G.W., Liang, X., Reinhall, P.G, and Wang. Wie C. 2007. Design
of a multi-layered optical bend loss sensor for pressure and shear sensing.
Health Monitoring of Structural and Biological Systems, Proc. of SPIE
Vol. 6532
Lu Deng† and C.S. Cai‡. 2007. Applications of fiber optic sensors in civilengineering . Department of Civil and Environmental Engineering,Louisianan State University. Structural Engineering and Mechanics, Vol.25, No. 5
Malla R. B., Sen A. dan Garrick N.W., 2008, “A Special Fiber Optic Sensor for
Measuring Wheel Loads Vehicles of Highways”. Sensors, vol 7, pp 2551-
2568.
Marzuki A., Yunianto M. dan Ismail Z. 2012. “Desain Alat Ukur Rugi – Rugi
Akibat Macrobending pada Multi-Mode Optical Fiber Berbasis Personal
Computer.” Indonesian Journal of Applied Physics, vol 2, no 2, pp 138.
Park, J. dan Mackay, S.. 2003. Practical Data Acquisition for Instrumentation andControl Systems. Burlington: Newnes
Pedrotti, F.L., Pedrotti, L.S. 1993. Introduction to Optics, 2nd Edition. New Jersey:
Prentice-Hall International, Inc.
Powers,P. John, 1993 An Introduction toFiber Optic Systems, Aksen Assoc. Inc.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
88
Rahayu T, 2014, Langgar Batas Tonase, Puluhan Truk Di Razia Tim
Gabungan.[Online] Available: http://www.solopos.com htm (Januari 21,
2014)
Reinhard, J. 2000. Fundamental of Fiber Optic an introduction for beginners.Technical University Graz. Austria
Šedivá, S, 2007. Integrated Optoelectronics. Faculty of Electrical Engineering
and Communication, Brno University of Technology. Brno.
Senior, J. M., 2009. Optical Fiber Communication Principles and Practice , ThirdEdition. Prentice Hall. England.
Serway R.A. and Jewett J.W., 2004, Physics For Scientist and Engineering 6th
Edition, Thomson Brooks, USA.
Wang, W.C., Ledoux, W.R., Sangeorzan, B.J., and Reinhall, P.G.. 2005. A shear
and plantar pressure sensor based on fiber-optic bend loss. Journal of
Rehabilitation Research & Development, Volume 42, No. 3, Hal 313-326
Woodward B., Husson E.B., 2005. Fiber Optics Installer And Technician Guide.
Sybex Inc., Marina Village Parkway, Alamada, CA. United States Of
America
Yeh, C. (1990).Handbook of Fiber Optics: Theory and Application. Michigan:
Academic Press Inc, Ann Arbor.
Yuan, S., Ansari, F., Liu, X., and Zhao, Y. 2005. Optic Fiber Based Dynamic
Pressure Sensor For WIM System. Sensors and Actuators A, Vol. 120, pp.
53-58.
Zendehnam, A., Mirzaei, M., Farashiani, A., and Farahadi, H.L.. 2010,
Investigation of Bending Loss in a Single-Mode Optical Fibre.
PRAMANA-Journal of Physics Vol 74 No 4, April 2010.
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
89
Lampiran 1 Data Pengujian LDR
Intensitas
(candela)
Tegangan
(volt)
49 5.2
57 5.3
80 5.4
93 5.5
115 5.6
152 5.7
190 5.9
211 6
265 6.2
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
90
Lampiran 2. Data Pengujian Nilai Pergeseran dengan Jari – JariKritis
Diameter(cm)
Transmitansi(%)
Loss(dB)
0,5 0,709137 2,9854011 0,863223 1,2775411,5 0,911673 0,8032162 0,945131 0,4901642,5 0,968301 0,279793 0,983685 0,1428783,5 0,987507 0,1091994 0,99415 0,0509634,5 0,998173 0,0158885 1 0
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
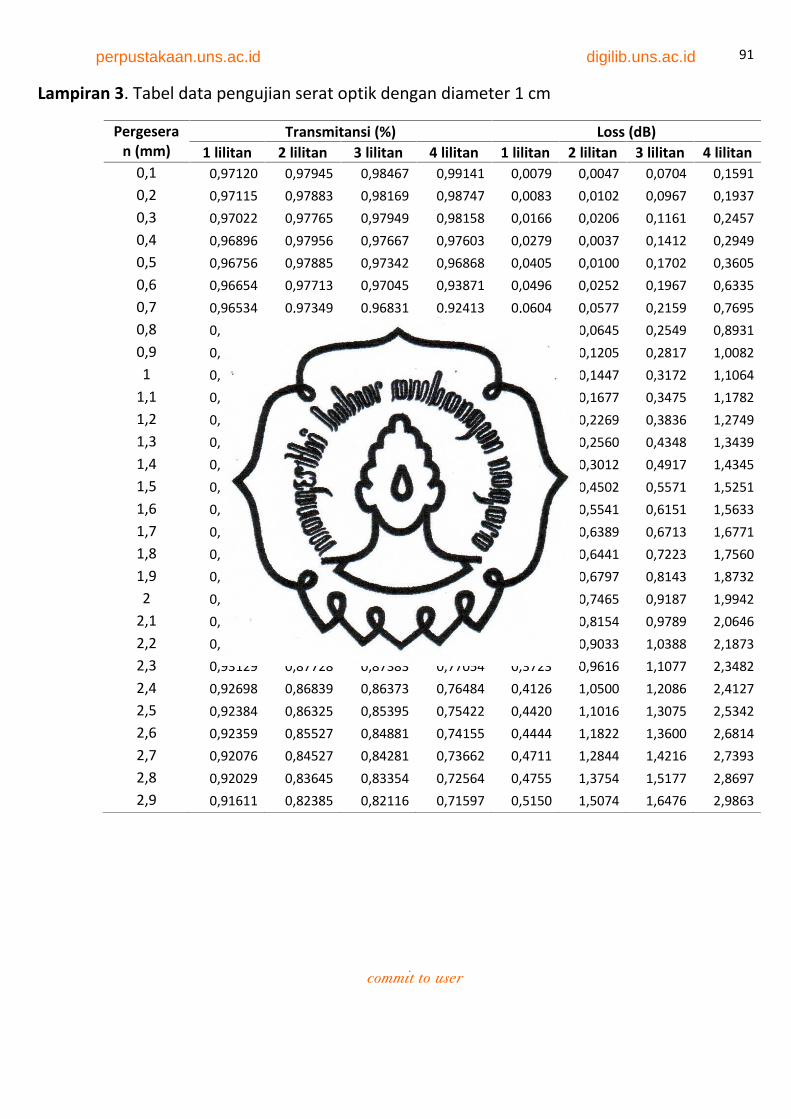
91
Lampiran 3. Tabel data pengujian serat optik dengan diameter 1 cm
Pergeseran (mm)
Transmitansi (%) Loss (dB)1 lilitan 2 lilitan 3 lilitan 4 lilitan 1 lilitan 2 lilitan 3 lilitan 4 lilitan
0,1 0,97120 0,97945 0,98467 0,99141 0,0079 0,0047 0,0704 0,15910,2 0,97115 0,97883 0,98169 0,98747 0,0083 0,0102 0,0967 0,19370,3 0,97022 0,97765 0,97949 0,98158 0,0166 0,0206 0,1161 0,24570,4 0,96896 0,97956 0,97667 0,97603 0,0279 0,0037 0,1412 0,29490,5 0,96756 0,97885 0,97342 0,96868 0,0405 0,0100 0,1702 0,36050,6 0,96654 0,97713 0,97045 0,93871 0,0496 0,0252 0,1967 0,63350,7 0,96534 0,97349 0,96831 0,92413 0,0604 0,0577 0,2159 0,76950,8 0,96399 0,97272 0,96397 0,91108 0,0726 0,0645 0,2549 0,89310,9 0,96242 0,96647 0,96100 0,89907 0,0867 0,1205 0,2817 1,00821 0,96100 0,96379 0,95708 0,88897 0,0995 0,1447 0,3172 1,1064
1,1 0,95964 0,96123 0,95375 0,88165 0,1119 0,1677 0,3475 1,17821,2 0,95781 0,95470 0,94980 0,87189 0,1285 0,2269 0,3836 1,27491,3 0,95579 0,95152 0,94421 0,86499 0,1467 0,2560 0,4348 1,34391,4 0,95459 0,94657 0,93804 0,85601 0,1577 0,3012 0,4917 1,43451,5 0,94976 0,93047 0,93101 0,84714 0,2017 0,4502 0,5571 1,52511,6 0,94799 0,91941 0,92481 0,84342 0,2179 0,5541 0,6151 1,56331,7 0,94569 0,91048 0,91885 0,83244 0,2391 0,6389 0,6713 1,67711,8 0,94289 0,90993 0,91347 0,82491 0,2648 0,6441 0,7223 1,75601,9 0,94084 0,90621 0,90384 0,81386 0,2837 0,6797 0,8143 1,87322 0,93932 0,89927 0,89305 0,80260 0,2977 0,7465 0,9187 1,9942
2,1 0,93650 0,89216 0,88688 0,79612 0,3239 0,8154 0,9789 2,06462,2 0,93381 0,88318 0,88078 0,78495 0,3488 0,9033 1,0388 2,18732,3 0,93129 0,87728 0,87383 0,77054 0,3723 0,9616 1,1077 2,34822,4 0,92698 0,86839 0,86373 0,76484 0,4126 1,0500 1,2086 2,41272,5 0,92384 0,86325 0,85395 0,75422 0,4420 1,1016 1,3075 2,53422,6 0,92359 0,85527 0,84881 0,74155 0,4444 1,1822 1,3600 2,68142,7 0,92076 0,84527 0,84281 0,73662 0,4711 1,2844 1,4216 2,73932,8 0,92029 0,83645 0,83354 0,72564 0,4755 1,3754 1,5177 2,86972,9 0,91611 0,82385 0,82116 0,71597 0,5150 1,5074 1,6476 2,9863
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
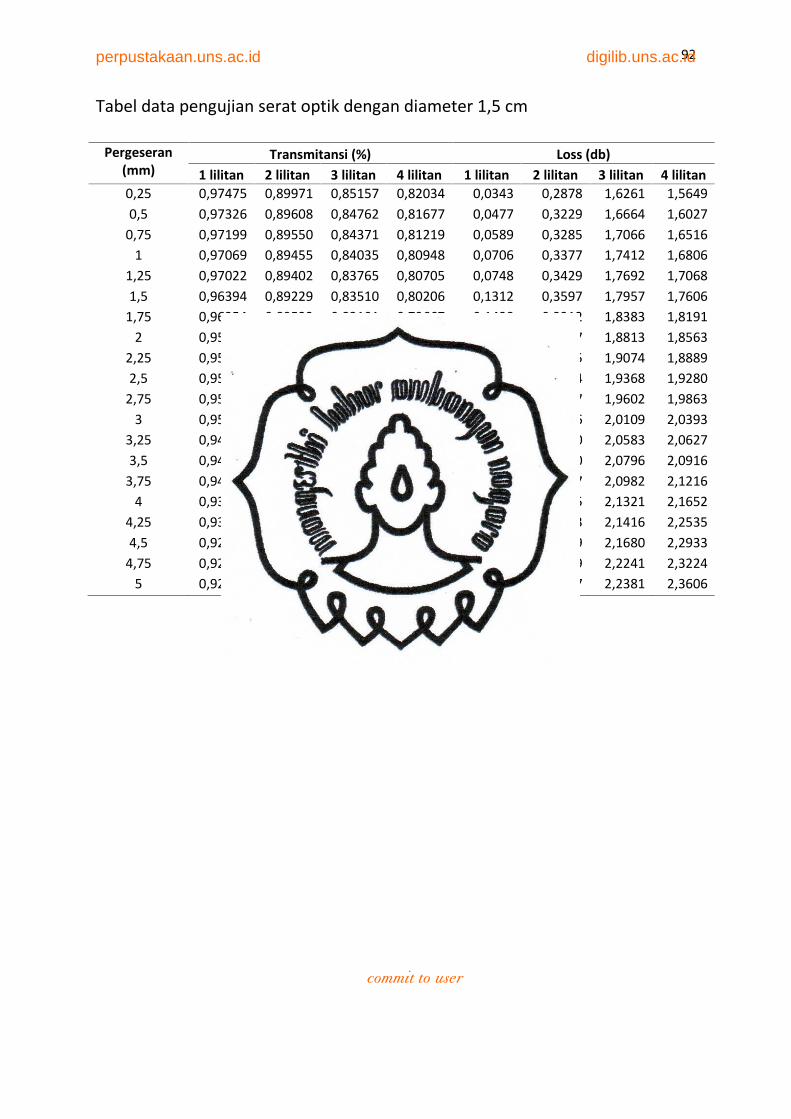
92
Tabel data pengujian serat optik dengan diameter 1,5 cm
Pergeseran(mm)
Transmitansi (%) Loss (db)1 lilitan 2 lilitan 3 lilitan 4 lilitan 1 lilitan 2 lilitan 3 lilitan 4 lilitan
0,25 0,97475 0,89971 0,85157 0,82034 0,0343 0,2878 1,6261 1,56490,5 0,97326 0,89608 0,84762 0,81677 0,0477 0,3229 1,6664 1,6027
0,75 0,97199 0,89550 0,84371 0,81219 0,0589 0,3285 1,7066 1,65161 0,97069 0,89455 0,84035 0,80948 0,0706 0,3377 1,7412 1,6806
1,25 0,97022 0,89402 0,83765 0,80705 0,0748 0,3429 1,7692 1,70681,5 0,96394 0,89229 0,83510 0,80206 0,1312 0,3597 1,7957 1,7606
1,75 0,96254 0,89522 0,83101 0,79667 0,1438 0,3312 1,8383 1,81912 0,95715 0,89910 0,82690 0,79327 0,1926 0,2937 1,8813 1,8563
2,25 0,95436 0,89221 0,82443 0,79031 0,2180 0,3605 1,9074 1,88892,5 0,95608 0,88496 0,82164 0,78675 0,2024 0,4314 1,9368 1,9280
2,75 0,95409 0,88502 0,81943 0,78149 0,2204 0,4307 1,9602 1,98633 0,95146 0,88259 0,81466 0,77673 0,2444 0,4546 2,0109 2,0393
3,25 0,94875 0,88174 0,81022 0,77465 0,2692 0,4630 2,0583 2,06273,5 0,94586 0,88448 0,80825 0,77207 0,2956 0,4360 2,0796 2,0916
3,75 0,94560 0,88522 0,80651 0,76941 0,2981 0,4287 2,0982 2,12164 0,93936 0,88504 0,80337 0,76556 0,3556 0,4305 2,1321 2,1652
4,25 0,93250 0,88782 0,80249 0,75781 0,4193 0,4033 2,1416 2,25354,5 0,92905 0,88286 0,80006 0,75435 0,4514 0,4519 2,1680 2,2933
4,75 0,92964 0,88084 0,79491 0,75183 0,4459 0,4719 2,2241 2,32245 0,92482 0,87670 0,79363 0,74853 0,4911 0,5127 2,2381 2,3606
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
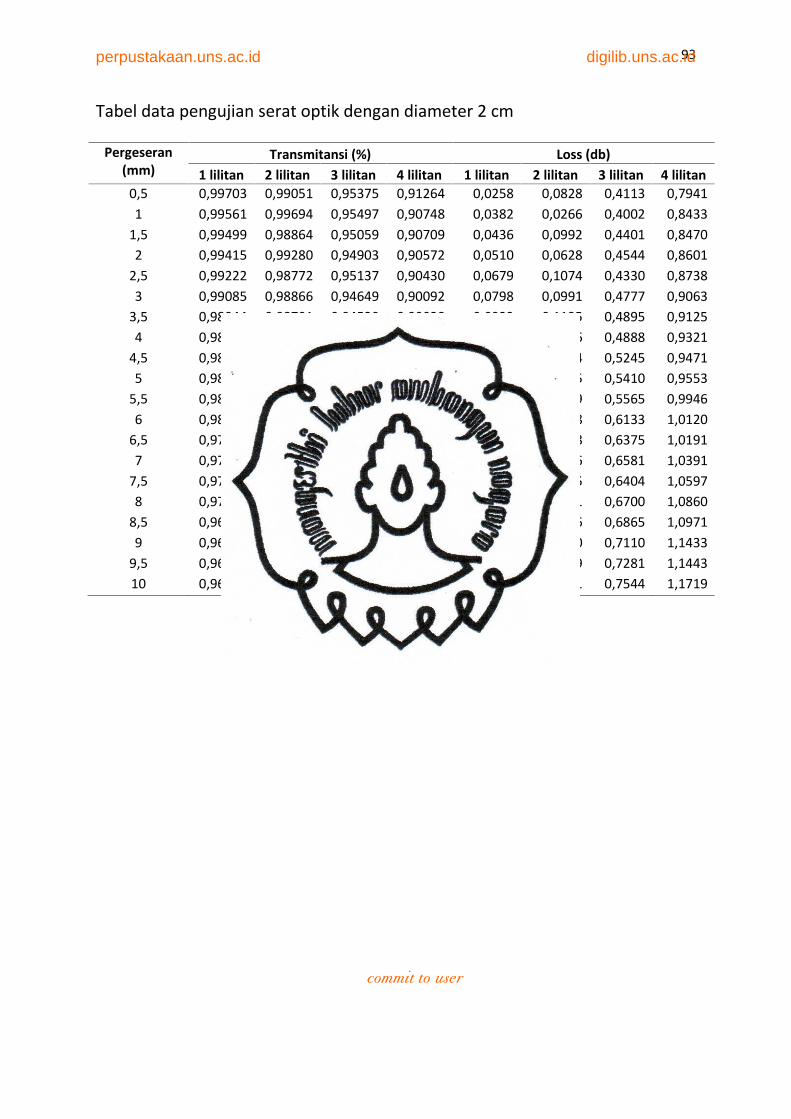
93
Tabel data pengujian serat optik dengan diameter 2 cm
Pergeseran(mm)
Transmitansi (%) Loss (db)1 lilitan 2 lilitan 3 lilitan 4 lilitan 1 lilitan 2 lilitan 3 lilitan 4 lilitan
0,5 0,99703 0,99051 0,95375 0,91264 0,0258 0,0828 0,4113 0,79411 0,99561 0,99694 0,95497 0,90748 0,0382 0,0266 0,4002 0,8433
1,5 0,99499 0,98864 0,95059 0,90709 0,0436 0,0992 0,4401 0,84702 0,99415 0,99280 0,94903 0,90572 0,0510 0,0628 0,4544 0,8601
2,5 0,99222 0,98772 0,95137 0,90430 0,0679 0,1074 0,4330 0,87383 0,99085 0,98866 0,94649 0,90092 0,0798 0,0991 0,4777 0,9063
3,5 0,98944 0,98701 0,94520 0,90028 0,0922 0,1135 0,4895 0,91254 0,98758 0,98315 0,94528 0,89825 0,1086 0,1476 0,4888 0,9321
4,5 0,98431 0,98147 0,94140 0,89670 0,1374 0,1624 0,5245 0,94715 0,98249 0,98135 0,93962 0,89585 0,1535 0,1635 0,5410 0,9553
5,5 0,98115 0,98052 0,93794 0,89180 0,1653 0,1709 0,5565 0,99466 0,98019 0,97929 0,93183 0,89002 0,1738 0,1818 0,6133 1,0120
6,5 0,97866 0,97568 0,92924 0,88929 0,1874 0,2138 0,6375 1,01917 0,97821 0,97773 0,92703 0,88725 0,1913 0,1956 0,6581 1,0391
7,5 0,97362 0,97516 0,92892 0,88515 0,2322 0,2185 0,6404 1,05978 0,97293 0,97297 0,92577 0,88247 0,2384 0,2381 0,6700 1,0860
8,5 0,96964 0,96944 0,92400 0,88134 0,2678 0,2696 0,6865 1,09719 0,96789 0,96895 0,92140 0,87667 0,2835 0,2740 0,7110 1,1433
9,5 0,96585 0,96784 0,91959 0,87656 0,3018 0,2839 0,7281 1,144310 0,96494 0,96648 0,91681 0,87379 0,3100 0,2961 0,7544 1,1719
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
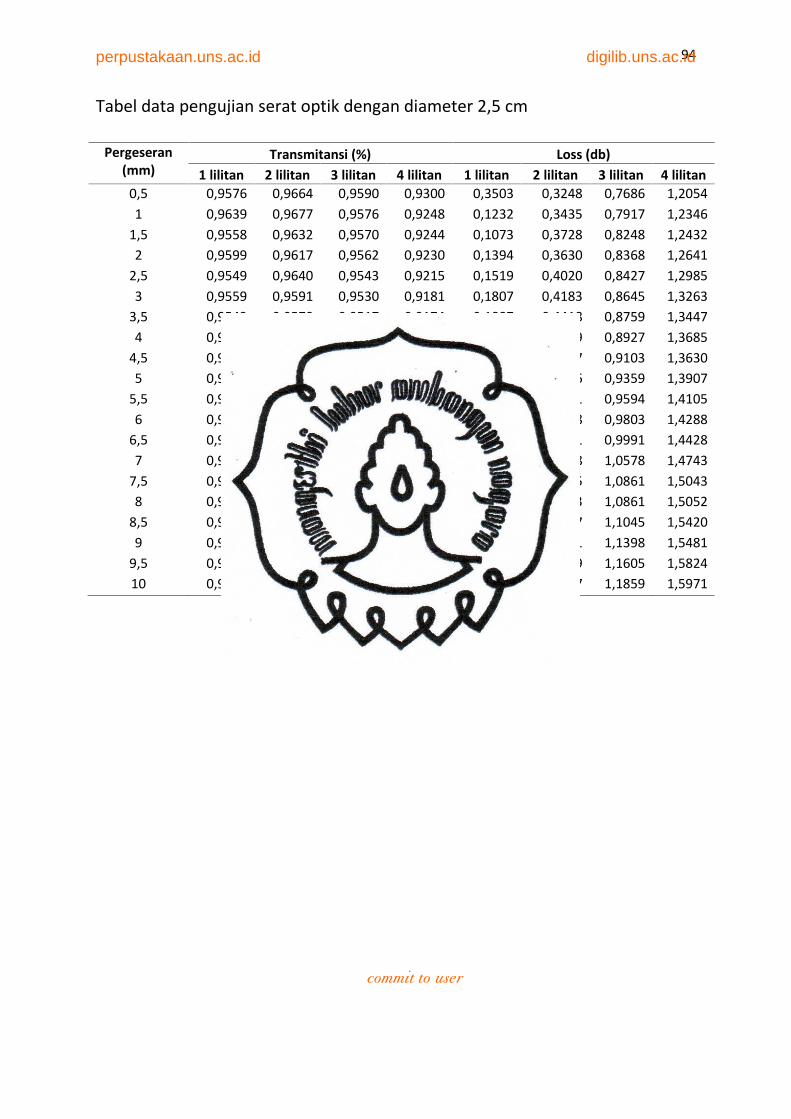
94
Tabel data pengujian serat optik dengan diameter 2,5 cm
Pergeseran(mm)
Transmitansi (%) Loss (db)1 lilitan 2 lilitan 3 lilitan 4 lilitan 1 lilitan 2 lilitan 3 lilitan 4 lilitan
0,5 0,9576 0,9664 0,9590 0,9300 0,3503 0,3248 0,7686 1,20541 0,9639 0,9677 0,9576 0,9248 0,1232 0,3435 0,7917 1,2346
1,5 0,9558 0,9632 0,9570 0,9244 0,1073 0,3728 0,8248 1,24322 0,9599 0,9617 0,9562 0,9230 0,1394 0,3630 0,8368 1,2641
2,5 0,9549 0,9640 0,9543 0,9215 0,1519 0,4020 0,8427 1,29853 0,9559 0,9591 0,9530 0,9181 0,1807 0,4183 0,8645 1,3263
3,5 0,9543 0,9578 0,9517 0,9174 0,1887 0,4418 0,8759 1,34474 0,9505 0,9579 0,9499 0,9154 0,2084 0,4579 0,8927 1,3685
4,5 0,9489 0,9539 0,9467 0,9138 0,2258 0,4537 0,9103 1,36305 0,9488 0,9521 0,9450 0,9129 0,2401 0,4656 0,9359 1,3907
5,5 0,9480 0,9504 0,9437 0,9088 0,2662 0,5071 0,9594 1,41056 0,9468 0,9442 0,9428 0,9070 0,2956 0,5188 0,9803 1,4288
6,5 0,9433 0,9416 0,9413 0,9062 0,3162 0,5481 0,9991 1,44287 0,9453 0,9394 0,9409 0,9042 0,3364 0,5168 1,0578 1,4743
7,5 0,9428 0,9413 0,9365 0,9020 0,3483 0,5635 1,0861 1,50438 0,9407 0,9381 0,9358 0,8993 0,3729 0,5923 1,0861 1,5052
8,5 0,9373 0,9363 0,9326 0,8981 0,3822 0,6177 1,1045 1,54209 0,9368 0,9337 0,9309 0,8934 0,3995 0,6181 1,1398 1,5481
9,5 0,9357 0,9318 0,9290 0,8933 0,4316 0,6259 1,1605 1,582410 0,9344 0,9290 0,9281 0,8904 0,4640 0,6747 1,1859 1,5971
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
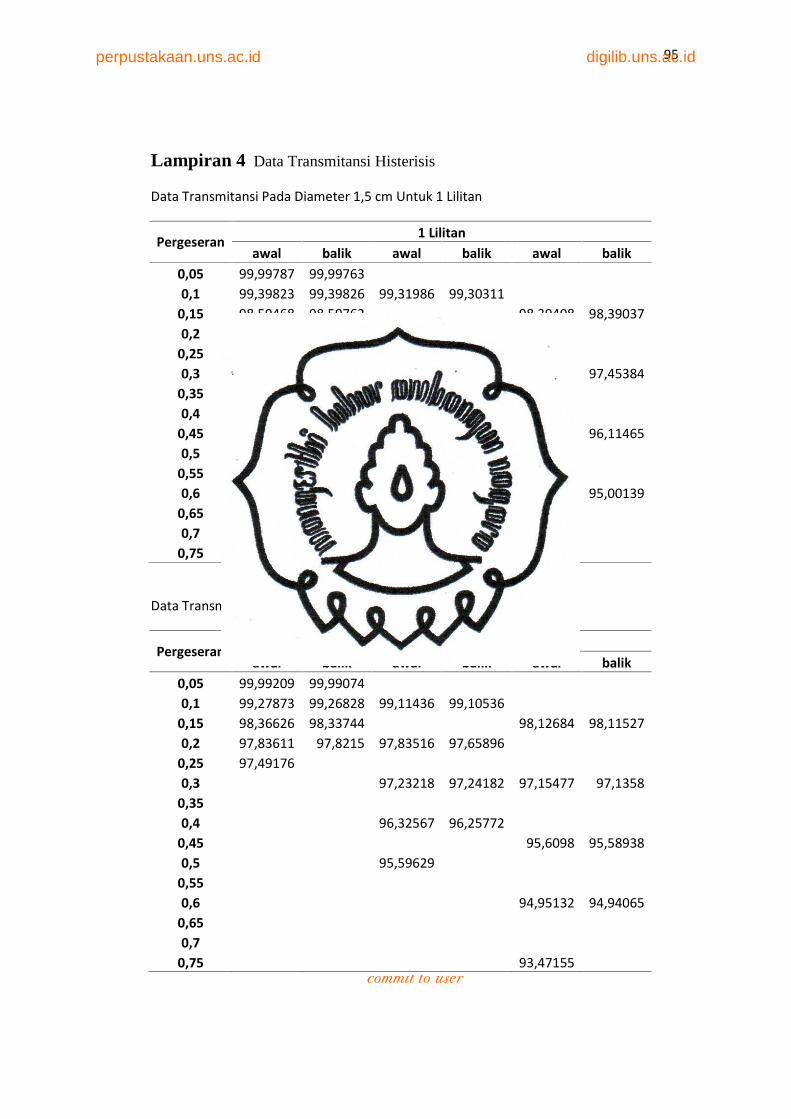
95
Lampiran 4 Data Transmitansi Histerisis
Data Transmitansi Pada Diameter 1,5 cm Untuk 1 Lilitan
Pergeseran 1 Lilitanawal balik awal balik awal balik
0,05 99,99787 99,997630,1 99,39823 99,39826 99,31986 99,30311
0,15 98,59468 98,59762 98,39408 98,390370,2 98,03684 98,0272 98,22749 98,22264
0,25 97,689410,3 97,57604 97,47557 97,46205 97,45384
0,350,4 96,78242 96,74056
0,45 96,20764 96,114650,5 95,79674
0,550,6 95,18964 95,00139
0,650,7
0,75 94,8479
Data Transmitansi Pada Diameter 1,5 cm Untuk 2 Lilitan
Pergeseran 2 Lilitanawal balik awal balik awal balik
0,05 99,99209 99,990740,1 99,27873 99,26828 99,11436 99,10536
0,15 98,36626 98,33744 98,12684 98,115270,2 97,83611 97,8215 97,83516 97,65896
0,25 97,491760,3 97,23218 97,24182 97,15477 97,1358
0,350,4 96,32567 96,25772
0,45 95,6098 95,589380,5 95,59629
0,550,6 94,95132 94,94065
0,650,7
0,75 93,47155
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
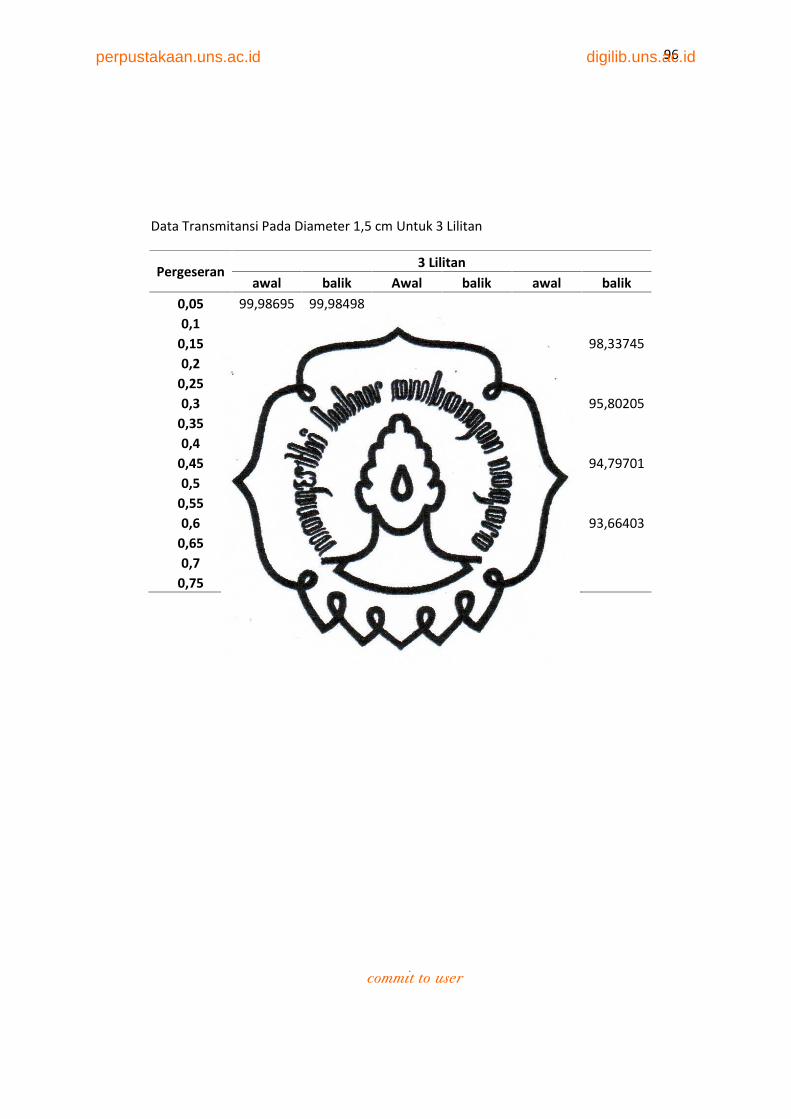
96
Data Transmitansi Pada Diameter 1,5 cm Untuk 3 Lilitan
Pergeseran 3 Lilitanawal balik Awal balik awal balik
0,05 99,98695 99,984980,1 99,13493 99,13355 99,02472 99,01747
0,15 98,40433 98,33401 98,39037 98,337450,2 97,83611 97,83516 97,8215 97,79124
0,25 97,13580,3 96,38172 96,28807 95,99175 95,80205
0,350,4 95,31328 95,31882
0,45 94,8479 94,797010,5 94,45309
0,550,6 93,68721 93,66403
0,650,7
0,75 92,43323
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
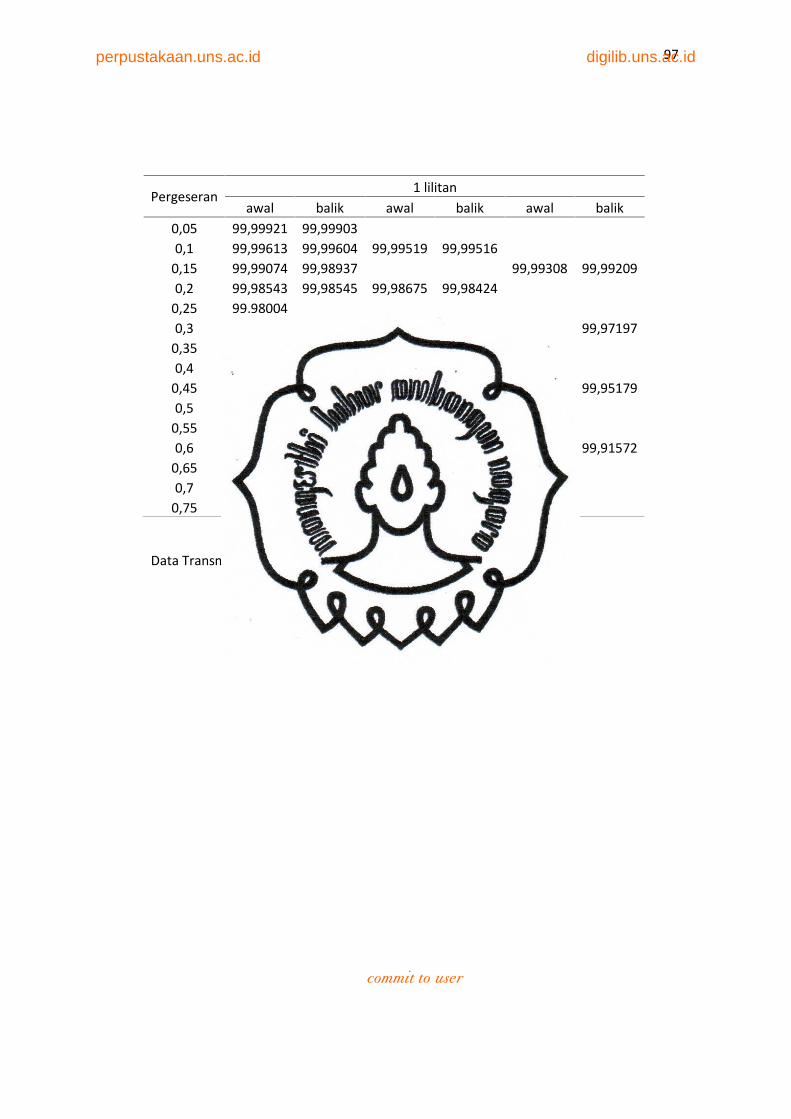
97
Data Transmitansi Pada Diameter 2 cm Untuk 1 Lilitan
Pergeseran 1 lilitanawal balik awal balik awal balik
0,05 99,99921 99,999030,1 99,99613 99,99604 99,99519 99,99516
0,15 99,99074 99,98937 99,99308 99,992090,2 99,98543 99,98545 99,98675 99,98424
0,25 99,980040,3 99,97502 99,97584 99,97777 99,97197
0,350,4 99,96521 99,96373
0,45 99,95348 99,951790,5 99,95093
0,550,6 99,91594 99,91572
0,650,7
0,75 99,87732
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
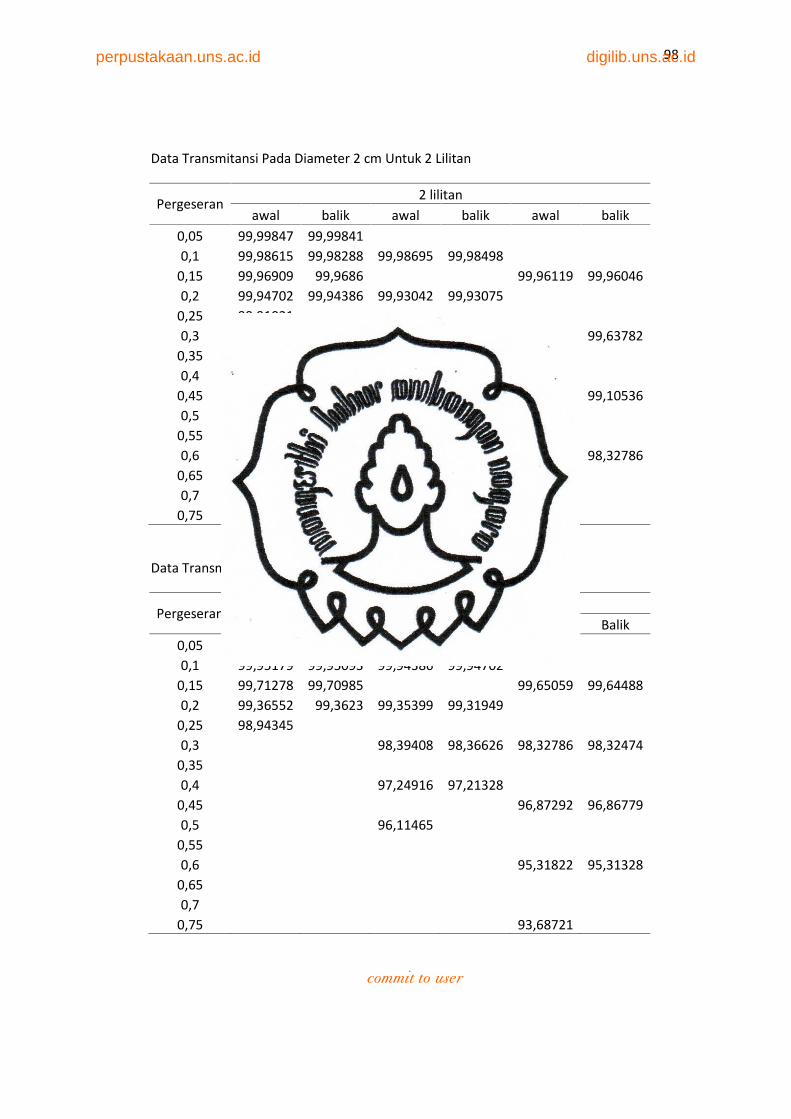
98
Data Transmitansi Pada Diameter 2 cm Untuk 2 Lilitan
Pergeseran 2 lilitanawal balik awal balik awal balik
0,05 99,99847 99,998410,1 99,98615 99,98288 99,98695 99,98498
0,15 99,96909 99,9686 99,96119 99,960460,2 99,94702 99,94386 99,93042 99,93075
0,25 99,910210,3 99,66632 99,66362 99,64462 99,63782
0,350,4 99,27873 99,26828
0,45 99,11436 99,105360,5 99,00149
0,550,6 98,32474 98,32786
0,650,7
0,75 97,23218
Data Transmitansi Pada Diameter 2 cm Untuk 2 Lilitan
Pergeseran 3 lilitanawal balik awal balik awal Balik
0,05 99,99323 99,993080,1 99,95179 99,95093 99,94386 99,94702
0,15 99,71278 99,70985 99,65059 99,644880,2 99,36552 99,3623 99,35399 99,31949
0,25 98,943450,3 98,39408 98,36626 98,32786 98,32474
0,350,4 97,24916 97,21328
0,45 96,87292 96,867790,5 96,11465
0,550,6 95,31822 95,31328
0,650,7
0,75 93,68721
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
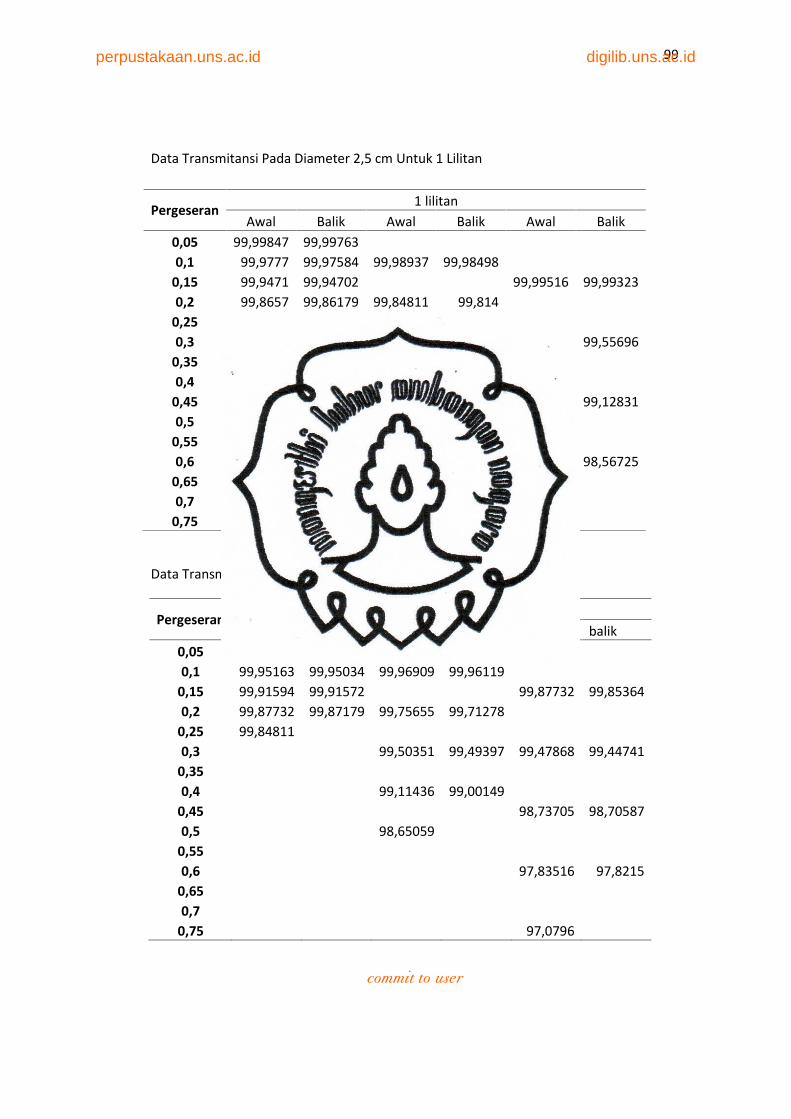
99
Data Transmitansi Pada Diameter 2,5 cm Untuk 1 Lilitan
Data Transmitansi Pada Diameter 2,5 cm Untuk 2 Lilitan
Pergeseran 2 lilitanawal balik awal Balik awal balik
0,05 99,98615 99,984980,1 99,95163 99,95034 99,96909 99,961190,15 99,91594 99,91572 99,87732 99,853640,2 99,87732 99,87179 99,75655 99,712780,25 99,848110,3 99,50351 99,49397 99,47868 99,447410,350,4 99,11436 99,001490,45 98,73705 98,705870,5 98,650590,550,6 97,83516 97,82150,650,70,75 97,0796
Pergeseran 1 lilitanAwal Balik Awal Balik Awal Balik
0,05 99,99847 99,997630,1 99,9777 99,97584 99,98937 99,984980,15 99,9471 99,94702 99,99516 99,993230,2 99,8657 99,86179 99,84811 99,8140,25 99,801230,3 99,66632 99,64462 99,59317 99,556960,350,4 99,30311 99,298890,45 99,18694 99,128310,5 98,962420,550,6 98,58791 98,567250,650,70,75 98,07151
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
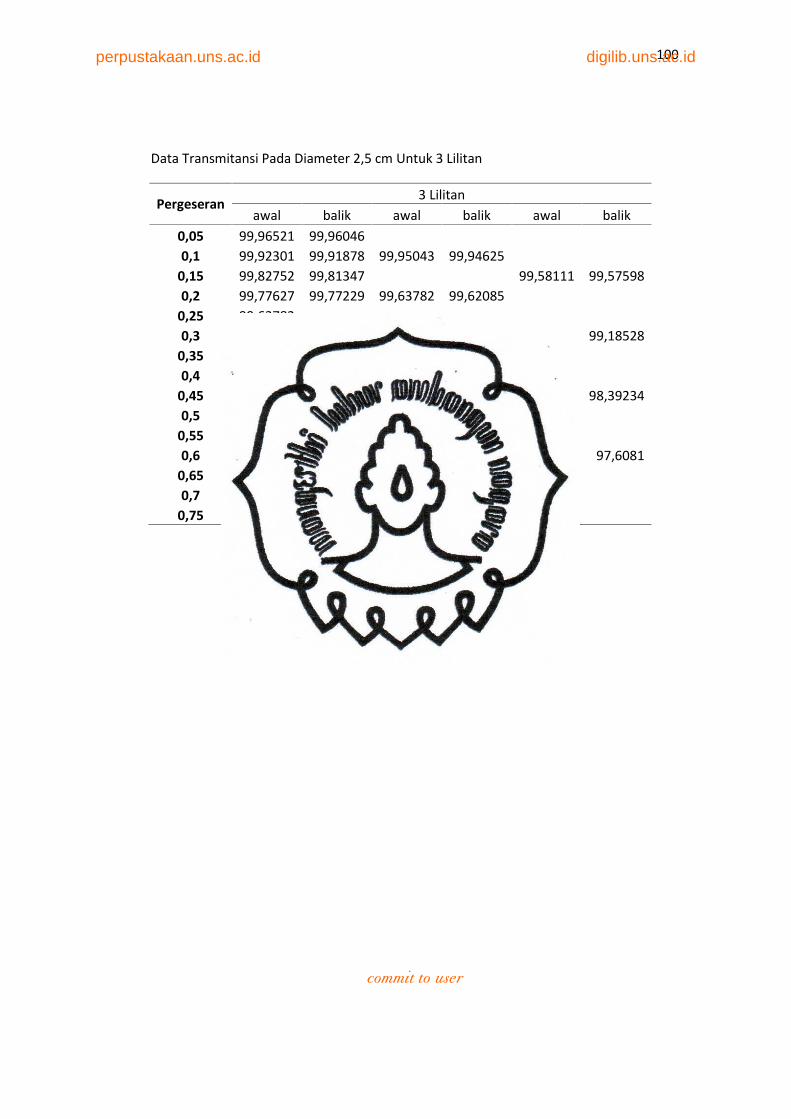
100
Data Transmitansi Pada Diameter 2,5 cm Untuk 3 Lilitan
Pergeseran 3 Lilitanawal balik awal balik awal balik
0,05 99,96521 99,960460,1 99,92301 99,91878 99,95043 99,946250,15 99,82752 99,81347 99,58111 99,575980,2 99,77627 99,77229 99,63782 99,620850,25 99,637820,3 99,3623 99,35399 99,25922 99,185280,350,4 98,98836 98,963360,45 98,47724 98,392340,5 98,650950,550,6 97,65896 97,60810,650,70,75 96,55043
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
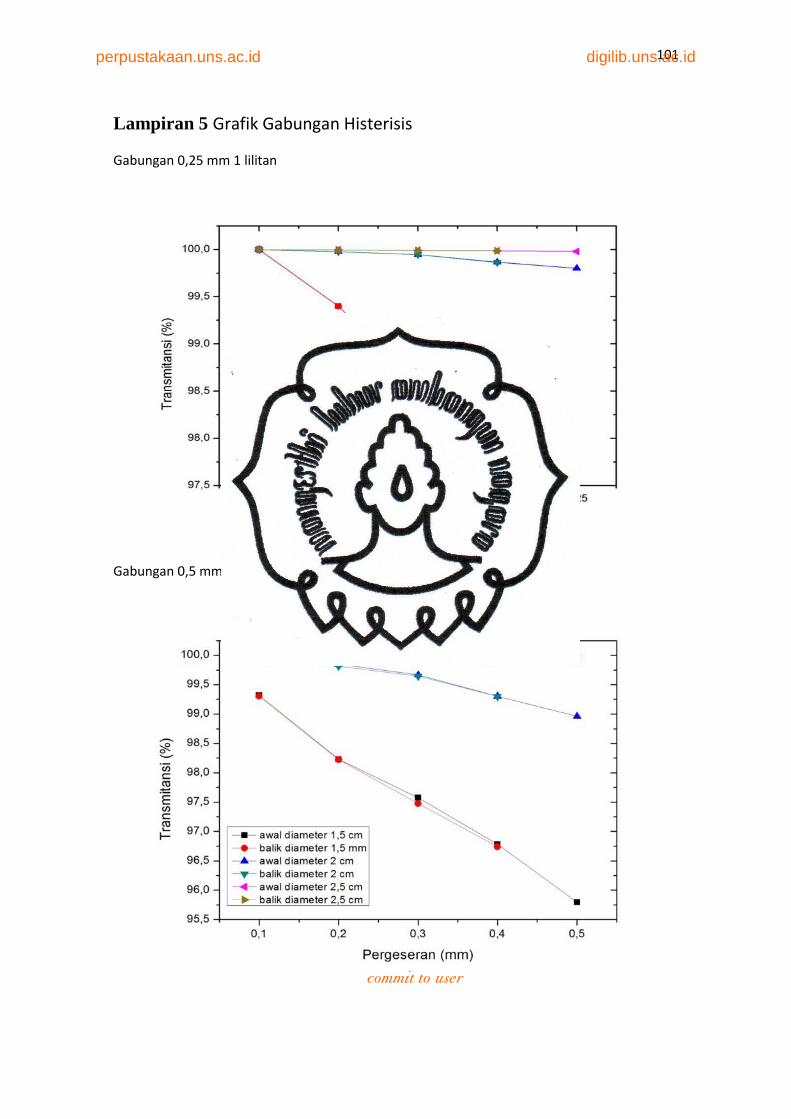
101
Lampiran 5 Grafik Gabungan Histerisis
Gabungan 0,25 mm 1 lilitan
Gabungan 0,5 mm 1 lilitan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
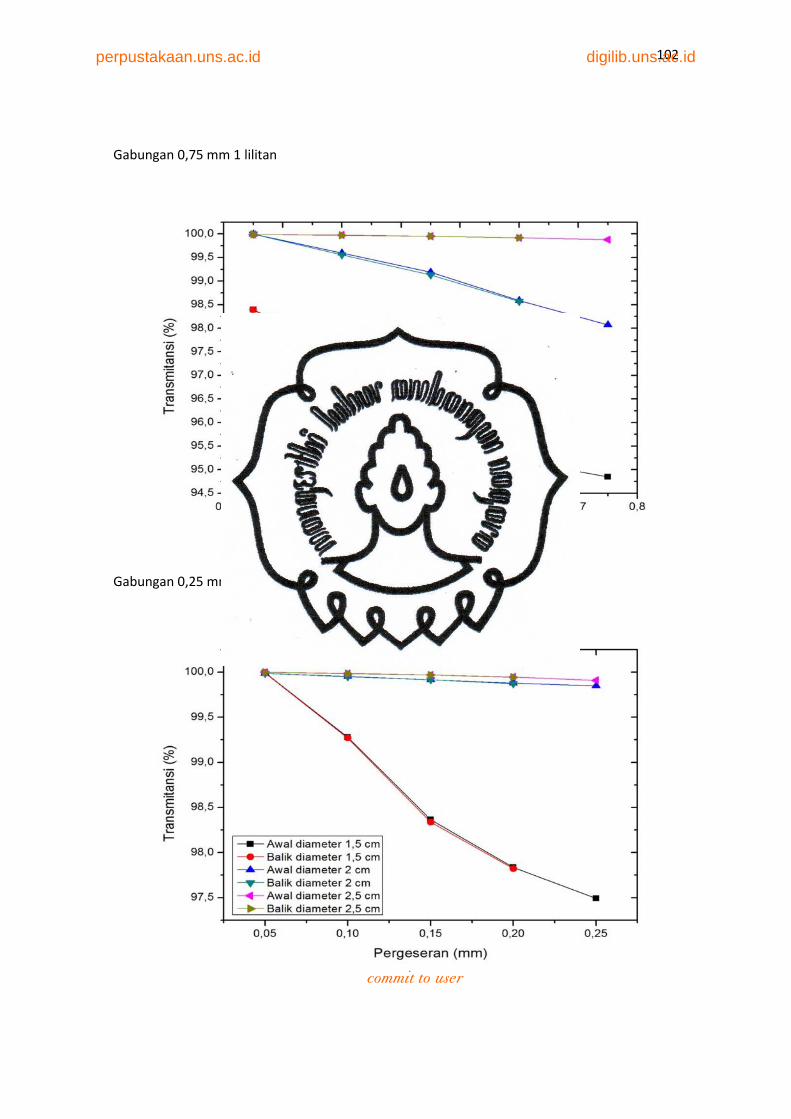
102
Gabungan 0,75 mm 1 lilitan
Gabungan 0,25 mm 2 lilitan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
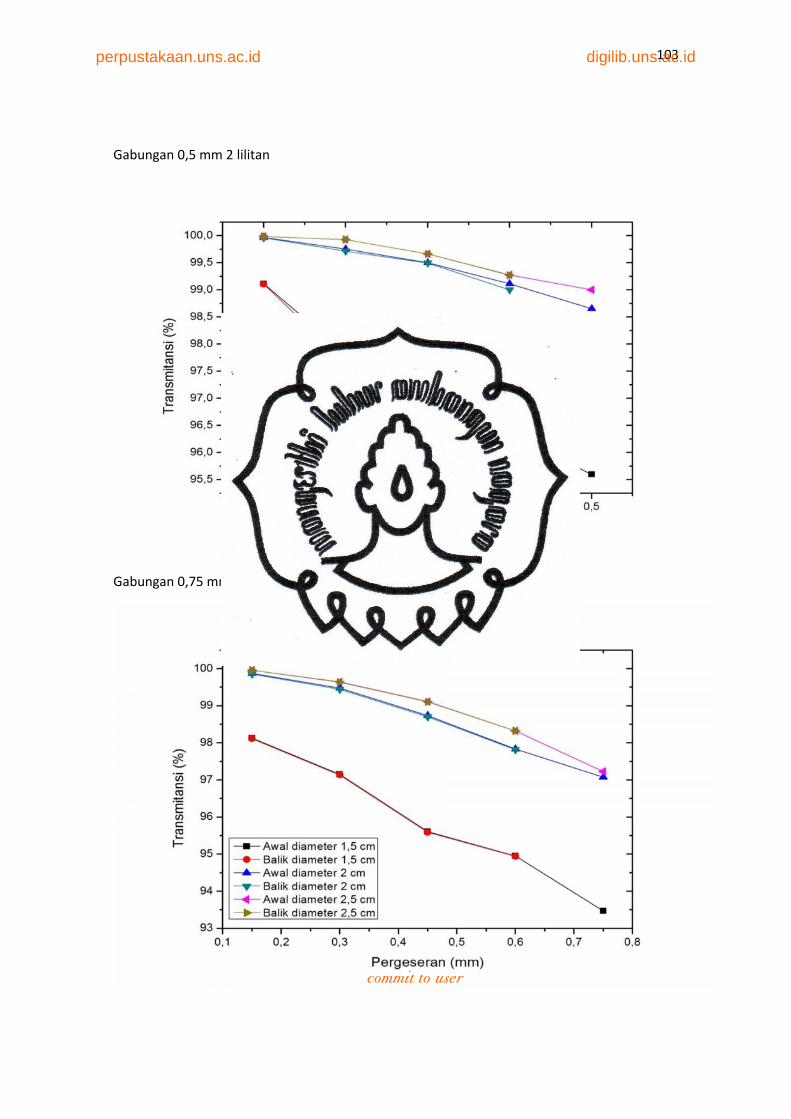
103
Gabungan 0,5 mm 2 lilitan
Gabungan 0,75 mm 2 lilitan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
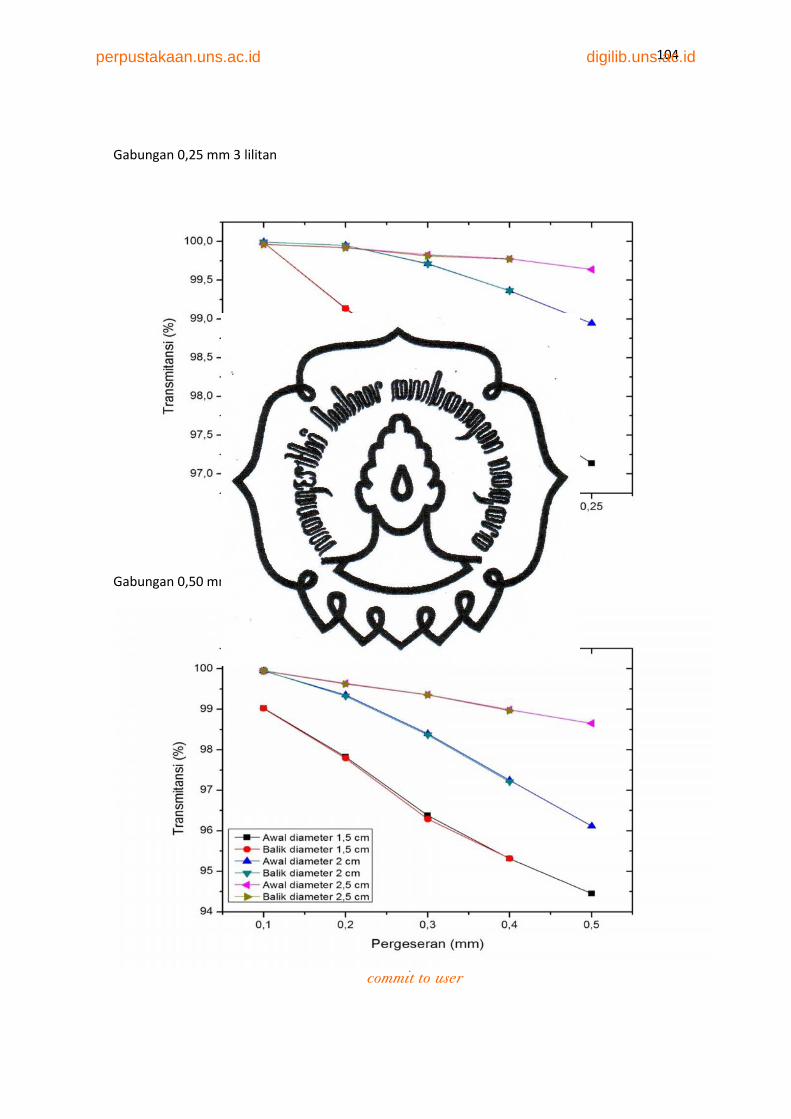
104
Gabungan 0,25 mm 3 lilitan
Gabungan 0,50 mm 3 lilitan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
105
Gabungan 0,75 mm 3 lilitan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
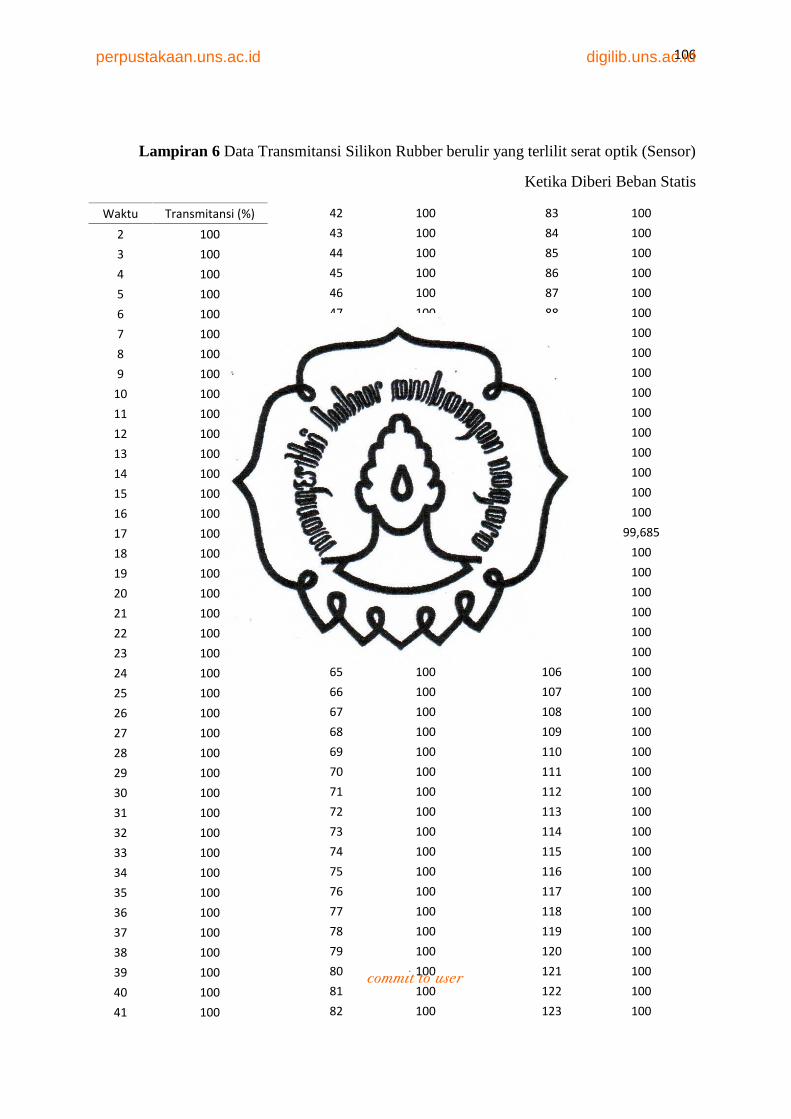
106
Lampiran 6 Data Transmitansi Silikon Rubber berulir yang terlilit serat optik (Sensor)
Ketika Diberi Beban Statis
Waktu Transmitansi (%)2 1003 1004 1005 1006 1007 1008 1009 100
10 10011 10012 10013 10014 10015 10016 10017 10018 10019 10020 10021 10022 10023 10024 10025 10026 10027 10028 10029 10030 10031 10032 10033 10034 10035 10036 10037 10038 10039 10040 10041 100
42 10043 10044 10045 10046 10047 10048 10049 10050 10051 10052 10053 10054 10055 10056 10057 10058 10059 10060 10061 10062 10063 10064 10065 10066 10067 10068 10069 10070 10071 10072 10073 10074 10075 10076 10077 10078 10079 10080 10081 10082 100
83 10084 10085 10086 10087 10088 10089 10090 10091 10092 10093 10094 10095 10096 10097 10098 10099 99,685
100 100101 100102 100103 100104 100105 100106 100107 100108 100109 100110 100111 100112 100113 100114 100115 100116 100117 100118 100119 100120 100121 100122 100123 100
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
107(Lanjutan)
124 100125 100126 100127 100128 100129 100130 100131 100132 100133 100134 100135 100136 100137 100138 100139 100140 100141 100142 100143 100144 100145 100146 100147 100148 100149 100150 100151 100152 100153 100154 100155 100156 100157 100158 100159 100160 100161 100162 100163 100164 100165 100166 100167 100168 100169 100
170 100171 100172 100173 100174 100175 100176 100177 100178 100179 100180 100181 100182 100183 100184 100185 100186 100187 100188 100189 100190 100191 100192 100193 100194 100195 100196 100197 100198 100199 100200 100201 100202 100203 100204 100205 100206 100207 100208 100209 100210 100211 100212 100213 100214 100215 99,863
216 100217 100218 100219 100220 100221 100222 100223 100224 100225 100226 99,863227 100228 100229 100230 99,863231 100232 100233 100234 99,685235 100236 100237 100238 100239 100240 100241 99,863242 100243 100244 100245 99,863246 100247 100248 100249 100250 100251 100252 100253 100254 100255 100256 99,507257 100258 100259 100260 99,863261 100
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
108(Lanjutan)
262 100263 100264 100265 100266 100267 100268 100269 100270 100271 99,863272 100273 100274 100275 99,863276 100277 100278 100279 100280 100281 100282 99,863283 100284 100285 100286 99,685287 100288 100289 100290 99,685291 100292 100293 100294 99,863295 100296 100297 99,863298 100299 100300 100301 99,685302 100303 100304 100305 99,685306 100307 100
308 99,863309 99,863310 99,685311 100312 99,685313 99,863314 100315 99,863316 99,328317 100318 100319 99,685320 99,507321 100322 100323 99,685324 99,685325 99,863326 99,863327 99,507328 99,685329 100330 99,685331 98,793332 99,685333 99,685334 99,15335 98,615336 99,507337 99,328338 98,615339 98,437340 98,793341 98,437342 97,723343 98,08344 98,08345 97,545346 96,832347 97,01348 97,01349 96,118350 95,94351 96,297352 95,94353 95,227
354 95,048355 95,227356 94,87357 94,87358 94,692359 94,87360 94,335361 93,8362 94,692363 94,157364 93,622365 93,622366 93,979367 93,979368 93,265369 93,622370 93,8371 93,622372 93,265373 93,622374 93,8375 93,444376 93,087377 93,8378 93,622379 93,265380 93,265381 94,157382 93,622383 93,087384 93,444385 93,622386 93,444387 93,087388 93,265389 93,622390 93,265391 92,909392 93,444393 93,622394 93,265395 93,087396 93,8397 93,444398 93,087399 93,444
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
109(Lanjutan)
400 93,622401 93,444402 92,909403 93,622404 93,8405 93,444406 93,087407 93,8408 93,8409 92,552410 93,265411 93,444412 93,265413 92,552414 92,909415 93,444416 93,087417 92,73418 93,265419 93,444420 92,909421 92,909422 93,265423 93,444424 93,087425 93,087426 93,444427 93,444428 92,195429 93,265430 93,444431 93,265432 92,909433 93,444434 93,622435 93,087436 92,909437 93,979438 93,444439 92,909440 93,265441 93,622442 93,265443 92,73444 93,444445 93,622
446 93,622447 92,909448 93,622449 93,622450 93,265451 93,087452 93,444453 93,444454 92,909455 93,265456 93,444457 93,087458 92,73459 93,265460 93,444461 93,087462 92,73463 93,444464 93,444465 92,909466 93,087467 93,444468 93,444469 92,552470 93,265471 93,622472 93,265473 92,909474 93,444475 93,444476 93,087477 92,73478 93,265479 93,444480 92,73481 93,087482 93,444483 93,265484 92,552485 93,265486 93,622487 93,265488 92,909489 93,444490 93,622491 93,087
492 93,087493 93,622494 93,622495 93,087496 93,265497 92,909498 93,444499 92,73500 93,265501 93,444502 93,087503 92,73504 93,444505 93,444506 92,73507 92,909508 93,444509 93,444510 92,909511 93,265512 93,444513 93,265514 92,909515 93,8516 93,622517 93,265518 92,909519 93,444520 93,622521 93,087522 93,087523 93,8524 93,444525 93,087526 93,444527 93,979528 93,444529 92,909530 93,622531 93,8532 93,444533 93,087534 93,622535 93,622536 92,909537 93,265
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
110(Lanjutan)
538 93,622539 93,444540 92,909541 93,265542 93,444543 93,087544 92,73545 93,622546 93,622547 93,444548 92,909549 93,622550 93,622551 92,73552 93,265553 93,444554 93,444555 93,087556 93,444557 93,8558 93,444559 92,909560 93,622561 93,8562 93,087563 93,087564 93,8565 93,622566 93,087567 93,444568 93,979569 93,622570 92,909571 93,8572 93,8573 93,265574 92,909575 93,622576 93,622577 93,087578 93,087579 93,8580 93,622581 93,087582 93,444583 93,8
584 93,444585 93,087586 93,622587 93,8588 93,622589 93,265590 93,8591 93,8592 93,087593 93,265594 93,8595 93,8596 93,265597 93,622598 93,8599 93,444600 92,909601 93,622602 93,622603 93,444604 93,087605 93,622606 93,8607 93,444608 93,444609 93,8610 93,444611 93,087612 93,444613 93,8614 93,622615 92,909616 93,622617 93,8618 93,444619 93,265620 93,8621 93,8622 93,265623 93,444624 93,265625 93,622626 92,909627 93,622628 93,8629 93,444
630 93,087631 93,622632 93,8633 93,444634 93,265635 93,8636 93,8637 92,374638 93,622639 93,979640 93,622641 92,909642 93,622643 93,8644 93,444645 93,087646 92,909647 93,8648 93,265649 93,265650 93,8651 93,622652 93,087653 93,444654 93,8655 93,444656 92,909657 93,622658 93,8659 93,265660 93,265661 93,8662 93,622663 93,265664 93,444665 93,622666 93,622667 93,265668 93,444669 93,8670 93,444671 93,087672 93,622673 93,8674 93,265675 93,087
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
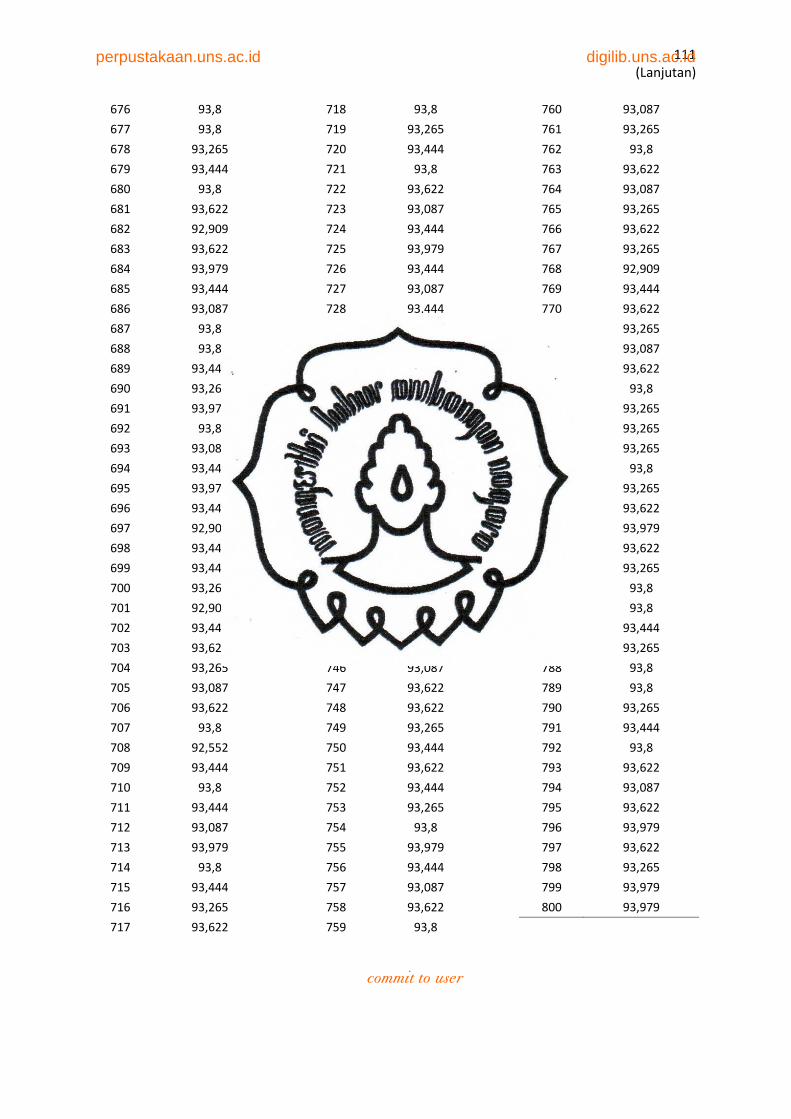
111(Lanjutan)
676 93,8677 93,8678 93,265679 93,444680 93,8681 93,622682 92,909683 93,622684 93,979685 93,444686 93,087687 93,8688 93,8689 93,444690 93,265691 93,979692 93,8693 93,087694 93,444695 93,979696 93,444697 92,909698 93,444699 93,444700 93,265701 92,909702 93,444703 93,622704 93,265705 93,087706 93,622707 93,8708 92,552709 93,444710 93,8711 93,444712 93,087713 93,979714 93,8715 93,444716 93,265717 93,622
718 93,8719 93,265720 93,444721 93,8722 93,622723 93,087724 93,444725 93,979726 93,444727 93,087728 93,444729 93,8730 93,444731 93,265732 93,979733 93,8734 93,265735 93,444736 93,979737 93,622738 92,909739 93,622740 93,979741 93,444742 93,087743 93,622744 93,8745 93,979746 93,087747 93,622748 93,622749 93,265750 93,444751 93,622752 93,444753 93,265754 93,8755 93,979756 93,444757 93,087758 93,622759 93,8
760 93,087761 93,265762 93,8763 93,622764 93,087765 93,265766 93,622767 93,265768 92,909769 93,444770 93,622771 93,265772 93,087773 93,622774 93,8775 93,265776 93,265777 93,265778 93,8779 93,265780 93,622781 93,979782 93,622783 93,265784 93,8785 93,8786 93,444787 93,265788 93,8789 93,8790 93,265791 93,444792 93,8793 93,622794 93,087795 93,622796 93,979797 93,622798 93,265799 93,979800 93,979
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
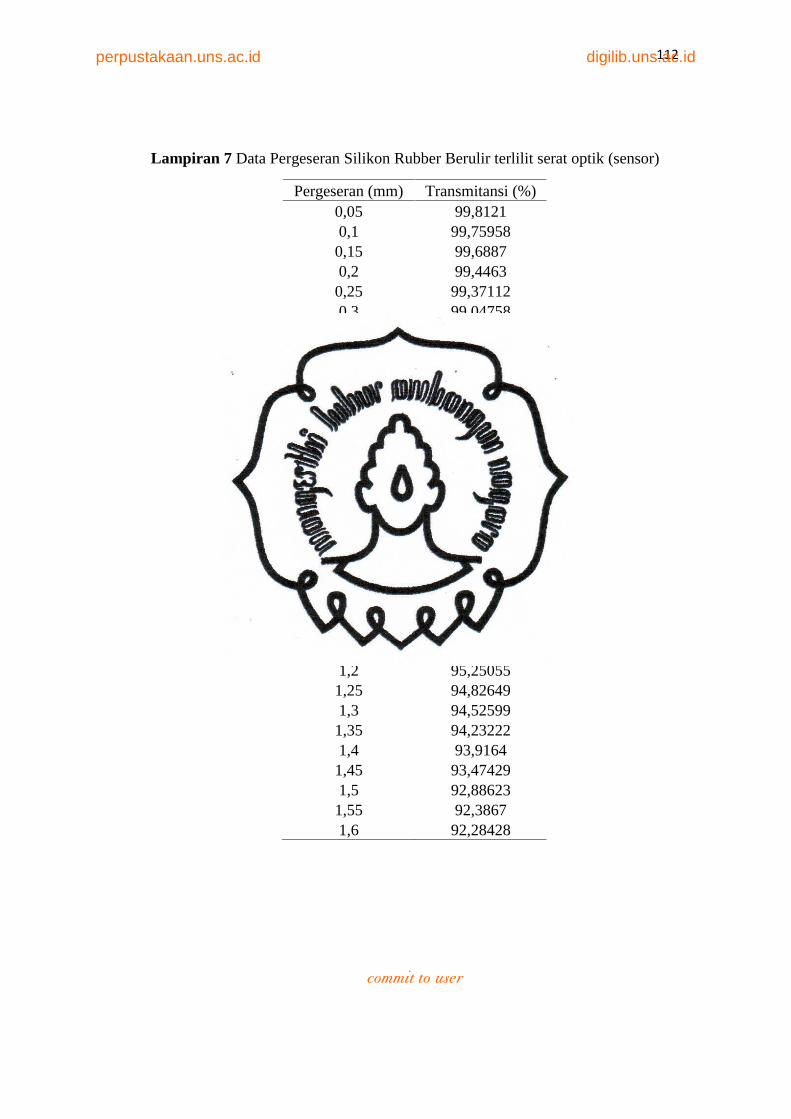
112
Lampiran 7 Data Pergeseran Silikon Rubber Berulir terlilit serat optik (sensor)
Pergeseran (mm) Transmitansi (%)0,05 99,81210,1 99,759580,15 99,68870,2 99,44630,25 99,371120,3 99,047580,35 98,808150,4 98,85820,45 98,263230,5 98,585860,55 98,257790,6 98,130280,65 98,033360,7 97,839650,75 97,376950,8 97,310490,85 97,069820,9 96,581080,95 96,29036
1 96,169411,05 95,933321,1 95,768961,15 95,561981,2 95,250551,25 94,826491,3 94,525991,35 94,232221,4 93,91641,45 93,474291,5 92,886231,55 92,38671,6 92,28428
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
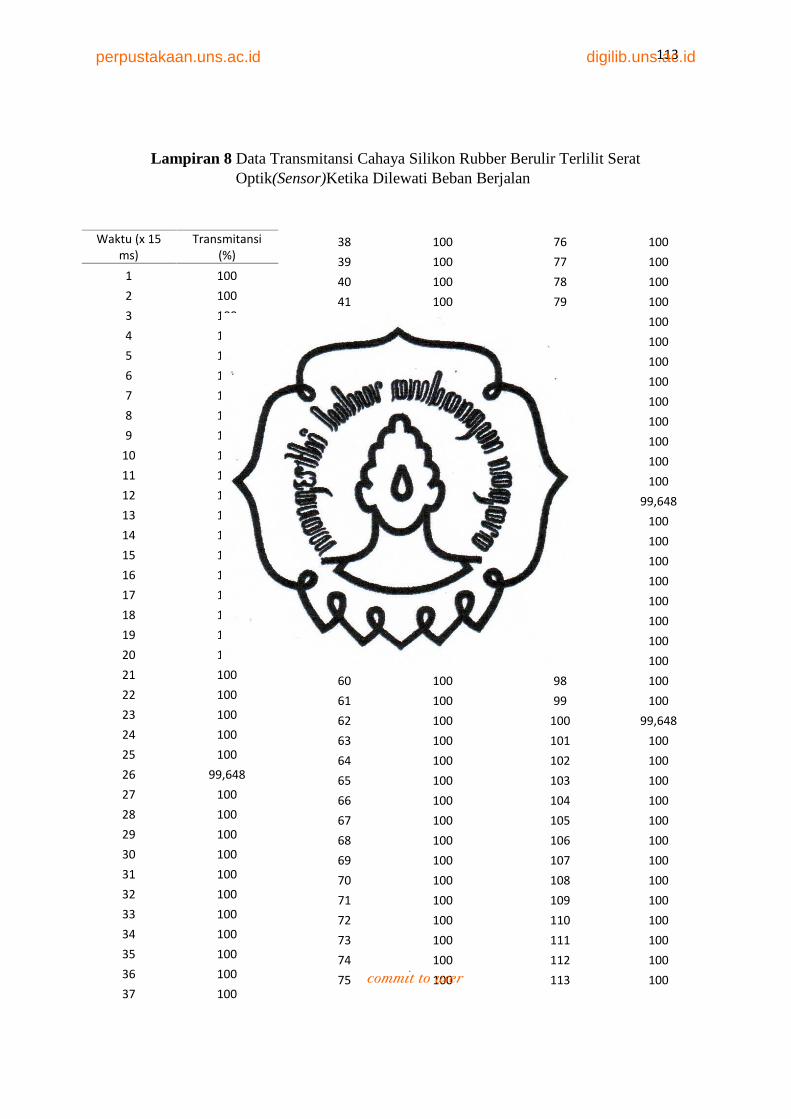
113
Lampiran 8 Data Transmitansi Cahaya Silikon Rubber Berulir Terlilit SeratOptik(Sensor)Ketika Dilewati Beban Berjalan
Waktu (x 15ms)
Transmitansi(%)
1 1002 1003 1004 1005 1006 1007 1008 1009 100
10 10011 10012 10013 10014 10015 10016 10017 10018 10019 10020 10021 10022 10023 10024 10025 10026 99,64827 10028 10029 10030 10031 10032 10033 10034 10035 10036 10037 100
38 10039 10040 10041 10042 10043 10044 10045 10046 10047 10048 10049 10050 10051 10052 10053 10054 10055 10056 10057 10058 10059 10060 10061 10062 10063 10064 10065 10066 10067 10068 10069 10070 10071 10072 10073 10074 10075 100
76 10077 10078 10079 10080 10081 10082 10083 10084 10085 10086 10087 10088 10089 99,64890 10091 10092 10093 10094 10095 10096 10097 10098 10099 100
100 99,648101 100102 100103 100104 100105 100106 100107 100108 100109 100110 100111 100112 100113 100
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
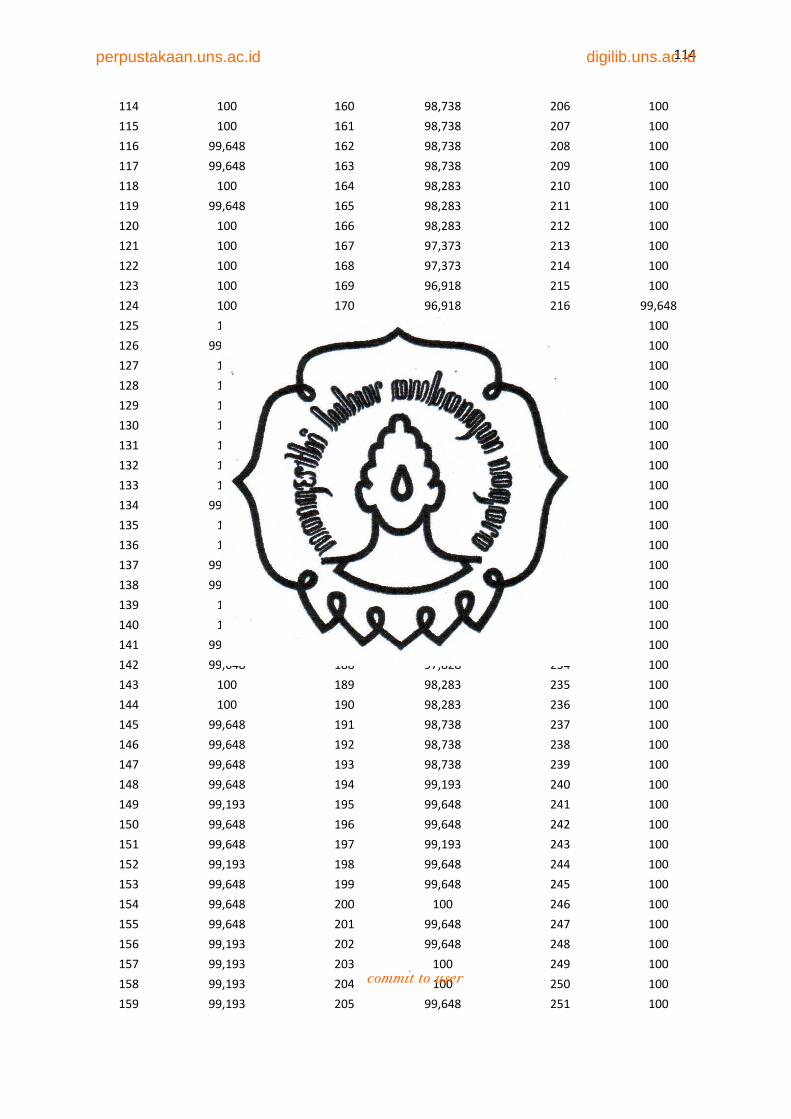
114
114 100115 100116 99,648117 99,648118 100119 99,648120 100121 100122 100123 100124 100125 100126 99,648127 100128 100129 100130 100131 100132 100133 100134 99,648135 100136 100137 99,648138 99,648139 100140 100141 99,648142 99,648143 100144 100145 99,648146 99,648147 99,648148 99,648149 99,193150 99,648151 99,648152 99,193153 99,648154 99,648155 99,648156 99,193157 99,193158 99,193159 99,193
160 98,738161 98,738162 98,738163 98,738164 98,283165 98,283166 98,283167 97,373168 97,373169 96,918170 96,918171 96,008172 95,098173 94,643174 94,187175 93,277176 93,277177 93,277178 92,822179 92,822180 93,732181 94,187182 94,187183 95,098184 96,463185 96,918186 97,373187 97,828188 97,828189 98,283190 98,283191 98,738192 98,738193 98,738194 99,193195 99,648196 99,648197 99,193198 99,648199 99,648200 100201 99,648202 99,648203 100204 100205 99,648
206 100207 100208 100209 100210 100211 100212 100213 100214 100215 100216 99,648217 100218 100219 100220 100221 100222 100223 100224 100225 100226 100227 100228 100229 100230 100231 100232 100233 100234 100235 100236 100237 100238 100239 100240 100241 100242 100243 100244 100245 100246 100247 100248 100249 100250 100251 100
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
115
252 100253 100254 100255 100256 100257 100258 100259 100260 100261 100262 100263 100264 100265 100266 100267 100268 100269 100270 100271 100272 100273 100274 100275 100276 100277 100278 100279 100280 100281 100282 100283 100284 100285 100286 100287 100288 100289 100290 100291 100292 100293 100294 99,648295 100296 100297 100
298 100299 100300 100301 100302 100303 100304 100305 100306 100307 100308 100309 100310 100311 100312 100313 100314 100315 100316 100317 100318 100319 100320 100321 100322 100323 100324 100325 100326 100327 100328 100329 100330 100331 100332 100333 100334 100335 99,648336 99,648337 99,648338 100339 99,648340 100341 100342 100343 100
344 100345 100346 100347 100348 100349 100350 100351 99,648352 100353 100354 100355 100356 100357 99,648358 99,648359 100360 100361 99,648362 99,648363 100364 100365 99,648366 100367 100368 100369 99,648370 100371 100372 99,648373 99,648374 99,648375 100376 99,648377 99,648378 99,648379 100380 99,648381 99,648382 100383 99,648384 100385 100386 100387 99,648388 99,648389 99,648
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
116
390 100391 99,648392 99,648393 100394 100395 99,648396 99,648397 100398 100399 99,648400 100401 99,648402 99,648403 99,648404 99,193405 100406 99,648407 99,648408 100409 100410 100411 99,648412 100413 100414 100415 100416 100417 99,648418 100419 100420 100421 99,648422 100423 100424 100425 100426 100427 100428 100429 100430 100431 100432 100433 99,648434 100435 100
436 99,648437 100438 100439 100440 99,648441 100442 100443 99,648444 100445 100446 100447 99,648448 100449 100450 99,648451 100452 99,648453 100454 99,648455 99,648456 100457 100458 99,648459 99,648460 100461 99,648462 99,648463 99,648464 100465 99,648466 99,648467 100468 100469 99,648470 99,648471 100472 100473 99,648474 99,648475 100476 100477 99,648478 100479 100480 99,648481 99,648
482 99,648483 100484 99,648485 99,648486 99,648487 99,648488 99,648489 99,648490 99,648491 99,648492 99,648493 99,648494 99,648495 99,648496 99,648497 99,648498 99,648499 99,193500 99,648501 99,648502 99,648503 99,193504 99,193505 99,648506 99,193507 99,193508 99,193509 99,193510 98,738511 98,738512 99,193513 99,193514 98,283515 98,283516 98,283517 97,828518 97,373519 96,918520 96,918521 96,463522 95,553523 95,553524 95,098525 94,643526 94,187527 94,187
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
117
528 94,187529 93,277530 93,277531 93,277532 92,822533 92,367534 91,912535 91,912536 91,457537 91,002538 90,547539 90,547540 90,092541 90,547542 90,547543 91,002544 91,002545 91,912546 92,822547 93,277548 93,732549 94,643550 95,553551 96,008552 96,918553 97,373554 98,283555 98,283556 99,193557 99,648558 99,648559 100560 100561 100562 100563 100564 100565 100566 100567 100568 100569 100570 100571 100572 100573 100
574 100575 100576 100577 100578 100579 100580 100581 100582 100583 100584 100585 100586 100587 100588 100589 100590 100591 100592 100593 100594 100595 100596 100597 100598 100599 100600 100601 100602 100603 100604 100605 100606 100607 100608 100609 100610 100611 100612 100613 100614 100615 100616 100617 100618 100619 100
620 100621 100622 100623 100624 100625 100626 100627 100628 100629 100630 100631 100632 100633 100634 100635 100636 100637 100638 100639 100640 100641 100642 100643 100644 100645 100646 100647 100648 100649 100650 100651 100652 100653 100654 100655 100656 100657 100658 100659 100660 100661 100662 100663 100664 100665 100
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
118
666 100667 100668 99,648669 100670 100671 99,648672 100673 100674 100675 100676 100677 100678 100679 100680 100681 100682 100683 100684 100685 100686 100687 100688 100689 100690 100691 100692 100693 100694 100695 100696 100697 100698 100699 100700 100701 100702 100703 100704 100705 100706 100707 100708 100709 100710 100711 100
712 100713 100714 100715 100716 100717 100718 100719 100720 100721 100722 100723 100724 100725 100726 100727 100728 100729 100730 100731 100732 100733 100734 100735 100736 100737 100738 100739 100740 100741 100742 100743 100744 100745 100746 100747 100748 100749 100750 100751 100752 100753 100754 100755 100756 100757 100
758 100759 100760 100761 100762 100763 100764 100765 100766 100767 100768 100769 100770 100771 100772 100773 100774 100775 100776 100777 100778 100779 100780 100781 100782 100783 100784 100785 100786 100787 100788 100789 100790 100791 100792 100793 100794 100795 100796 100797 100798 100799 100800 100
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user

119perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
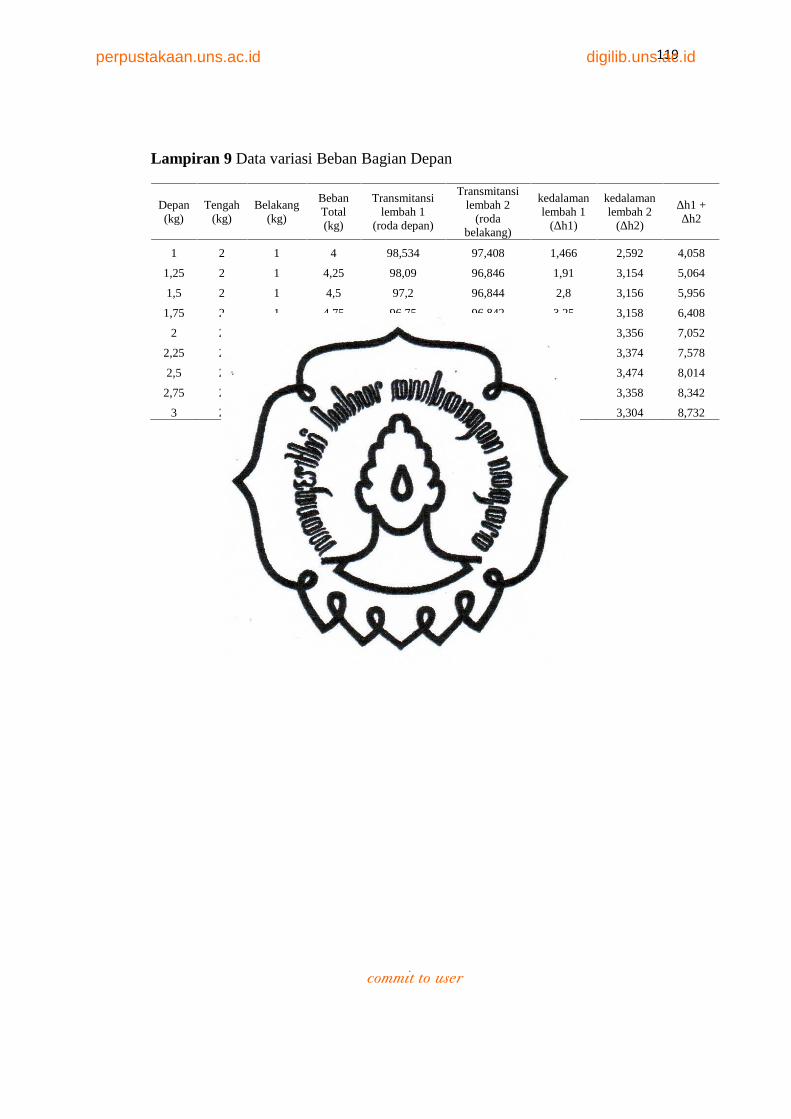
119
Lampiran 9 Data variasi Beban Bagian Depan
Depan(kg)
Tengah(kg)
Belakang(kg)
BebanTotal(kg)
Transmitansilembah 1
(roda depan)
Transmitansilembah 2
(rodabelakang)
kedalamanlembah 1
(Δh1)
kedalamanlembah 2
(Δh2)
Δh1 +Δh2
1 2 1 4 98,534 97,408 1,466 2,592 4,058
1,25 2 1 4,25 98,09 96,846 1,91 3,154 5,064
1,5 2 1 4,5 97,2 96,844 2,8 3,156 5,956
1,75 2 1 4,75 96,75 96,842 3,25 3,158 6,408
2 2 1 5 96,304 96,644 3,696 3,356 7,052
2,25 2 1 5,25 95,796 96,626 4,204 3,374 7,578
2,5 2 1 5,5 95,46 96,526 4,54 3,474 8,014
2,75 2 1 5,75 95,016 96,642 4,984 3,358 8,342
3 2 1 6 94,572 96,696 5,428 3,304 8,732
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
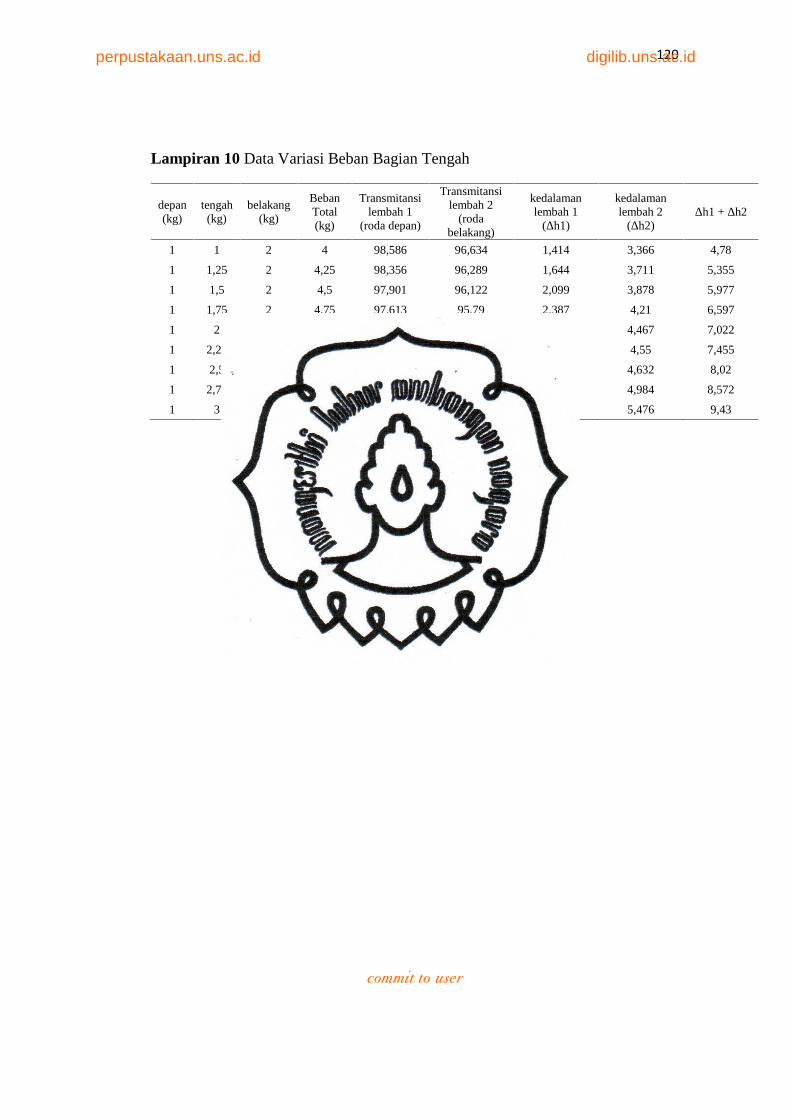
120
Lampiran 10 Data Variasi Beban Bagian Tengah
depan(kg)
tengah(kg)
belakang(kg)
BebanTotal(kg)
Transmitansilembah 1
(roda depan)
Transmitansilembah 2
(rodabelakang)
kedalamanlembah 1
(Δh1)
kedalamanlembah 2
(Δh2)Δh1 + Δh2
1 1 2 4 98,586 96,634 1,414 3,366 4,78
1 1,25 2 4,25 98,356 96,289 1,644 3,711 5,355
1 1,5 2 4,5 97,901 96,122 2,099 3,878 5,977
1 1,75 2 4,75 97,613 95,79 2,387 4,21 6,597
1 2 2 5 97,445 95,533 2,555 4,467 7,022
1 2,25 2 5,25 97,095 95,45 2,905 4,55 7,455
1 2,5 2 5,5 96,612 95,368 3,388 4,632 8,02
1 2,75 2 5,75 96,412 95,016 3,588 4,984 8,572
1 3 2 6 96,046 94,524 3,954 5,476 9,43
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
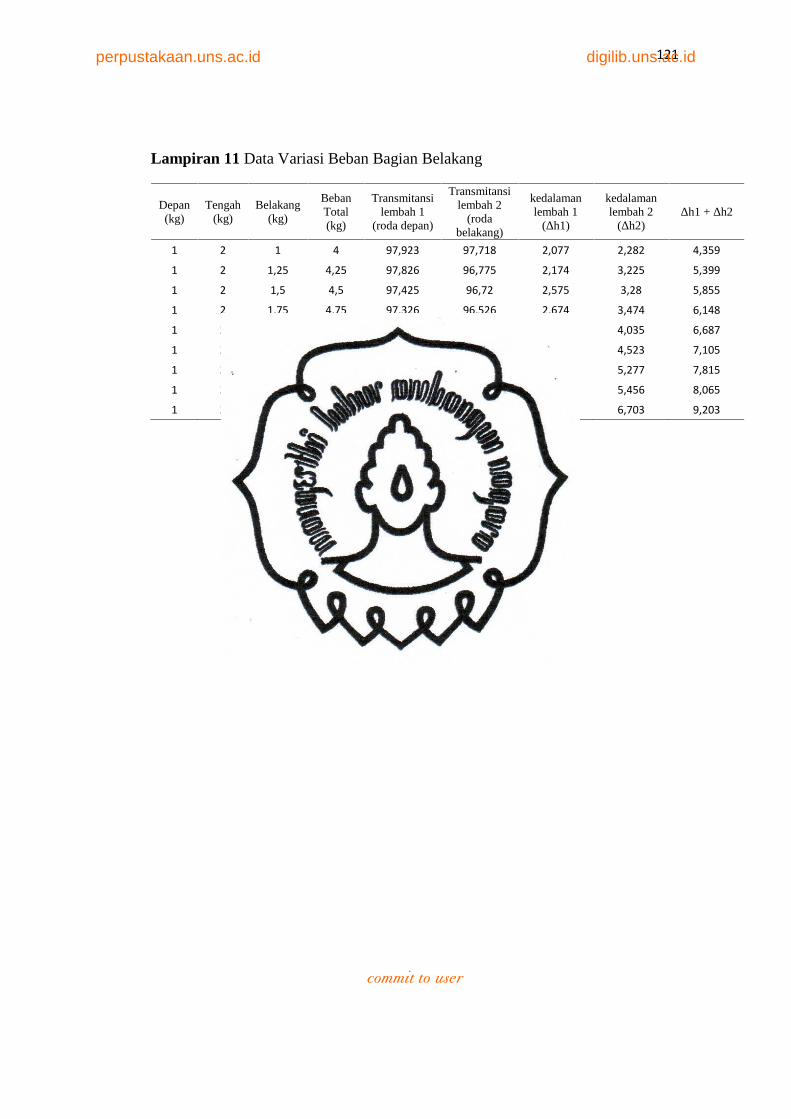
121
Lampiran 11 Data Variasi Beban Bagian Belakang
Depan(kg)
Tengah(kg)
Belakang(kg)
BebanTotal(kg)
Transmitansilembah 1
(roda depan)
Transmitansilembah 2
(rodabelakang)
kedalamanlembah 1
(Δh1)
kedalamanlembah 2
(Δh2)Δh1 + Δh2
1 2 1 4 97,923 97,718 2,077 2,282 4,359
1 2 1,25 4,25 97,826 96,775 2,174 3,225 5,399
1 2 1,5 4,5 97,425 96,72 2,575 3,28 5,855
1 2 1,75 4,75 97,326 96,526 2,674 3,474 6,148
1 2 2 5 97,348 95,965 2,652 4,035 6,687
1 2 2,25 5,25 97,418 95,477 2,582 4,523 7,105
1 2 2,5 5,5 97,462 94,723 2,538 5,277 7,815
1 2 2,75 5,75 97,391 94,544 2,609 5,456 8,065
1 2 3 6 97,5 93,297 2,5 6,703 9,203
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
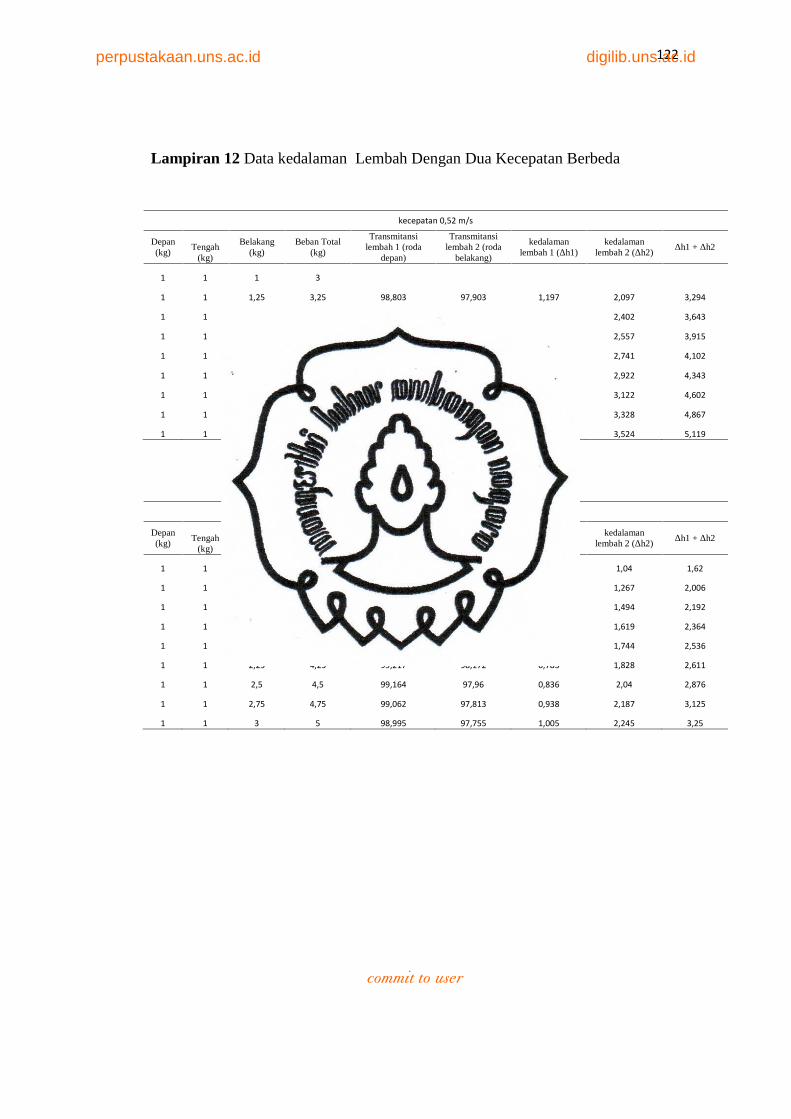
122
Lampiran 12 Data kedalaman Lembah Dengan Dua Kecepatan Berbeda
kecepatan 0,52 m/s
Depan(kg)
Tengah(kg)
Belakang(kg)
Beban Total(kg)
Transmitansilembah 1 (roda
depan)
Transmitansilembah 2 (roda
belakang)
kedalamanlembah 1 (Δh1)
kedalamanlembah 2 (Δh2) Δh1 + Δh2
1 1 1 3
1 1 1,25 3,25 98,803 97,903 1,197 2,097 3,294
1 1 1,5 3,5 98,759 97,598 1,241 2,402 3,643
1 1 1,75 3,75 98,642 97,443 1,358 2,557 3,915
1 1 2 4 98,639 97,259 1,361 2,741 4,102
1 1 2,25 4,25 98,579 97,078 1,421 2,922 4,343
1 1 2,5 4,5 98,52 96,878 1,48 3,122 4,602
1 1 2,75 4,75 98,461 96,672 1,539 3,328 4,867
1 1 3 5 98,405 96,476 1,595 3,524 5,119
kecepatan 0,69 m/s
Depan(kg)
Tengah(kg)
Belakang(kg)
Beban Total(kg)
Transmitansilembah 1 (roda
depan)
Transmitansilembah 2 (roda
belakang)
kedalamanlembah 1 (Δh1)
kedalamanlembah 2 (Δh2) Δh1 + Δh2
1 1 1 3 99,42 98,96 0,58 1,04 1,62
1 1 1,25 3,25 99,261 98,733 0,739 1,267 2,006
1 1 1,5 3,5 99,302 98,506 0,698 1,494 2,192
1 1 1,75 3,75 99,255 98,381 0,745 1,619 2,364
1 1 2 4 99,208 98,256 0,792 1,744 2,536
1 1 2,25 4,25 99,217 98,172 0,783 1,828 2,611
1 1 2,5 4,5 99,164 97,96 0,836 2,04 2,876
1 1 2,75 4,75 99,062 97,813 0,938 2,187 3,125
1 1 3 5 98,995 97,755 1,005 2,245 3,25
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
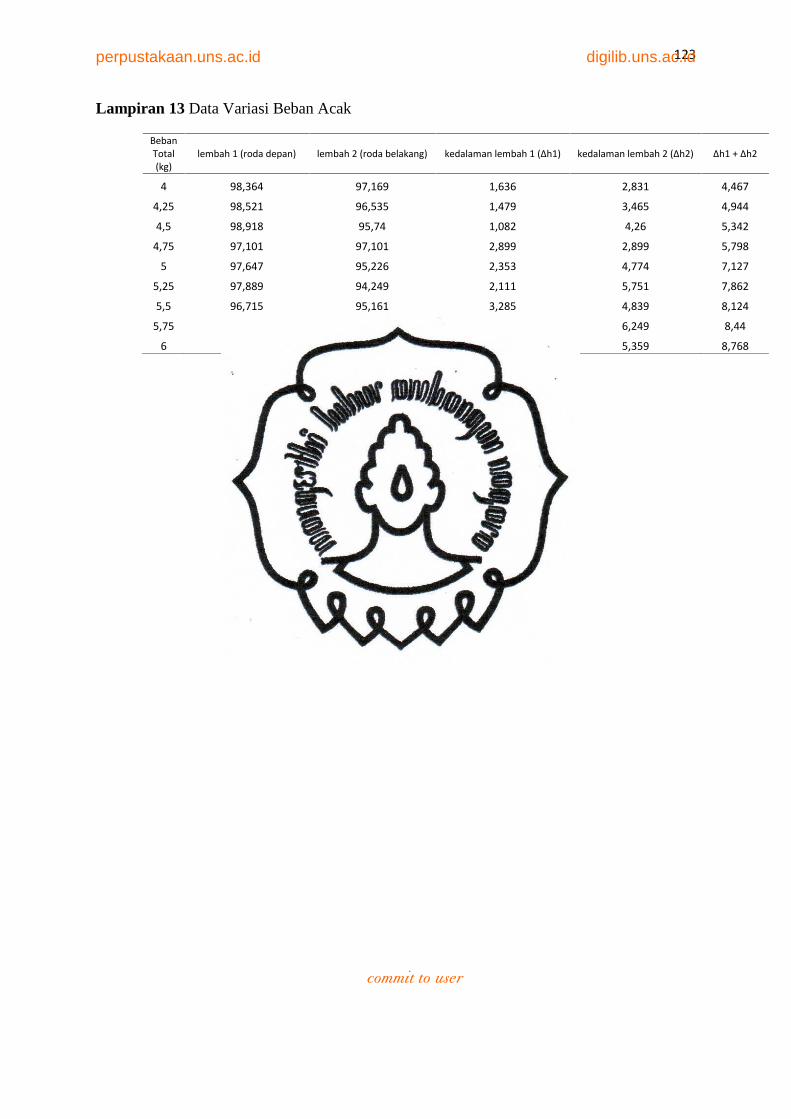
123
Lampiran 13 Data Variasi Beban Acak
BebanTotal(kg)
lembah 1 (roda depan) lembah 2 (roda belakang) kedalaman lembah 1 (Δh1) kedalaman lembah 2 (Δh2) Δh1 + Δh2
4 98,364 97,169 1,636 2,831 4,467
4,25 98,521 96,535 1,479 3,465 4,944
4,5 98,918 95,74 1,082 4,26 5,342
4,75 97,101 97,101 2,899 2,899 5,798
5 97,647 95,226 2,353 4,774 7,127
5,25 97,889 94,249 2,111 5,751 7,862
5,5 96,715 95,161 3,285 4,839 8,124
5,75 97,809 93,751 2,191 6,249 8,44
6 96,591 94,641 3,409 5,359 8,768
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
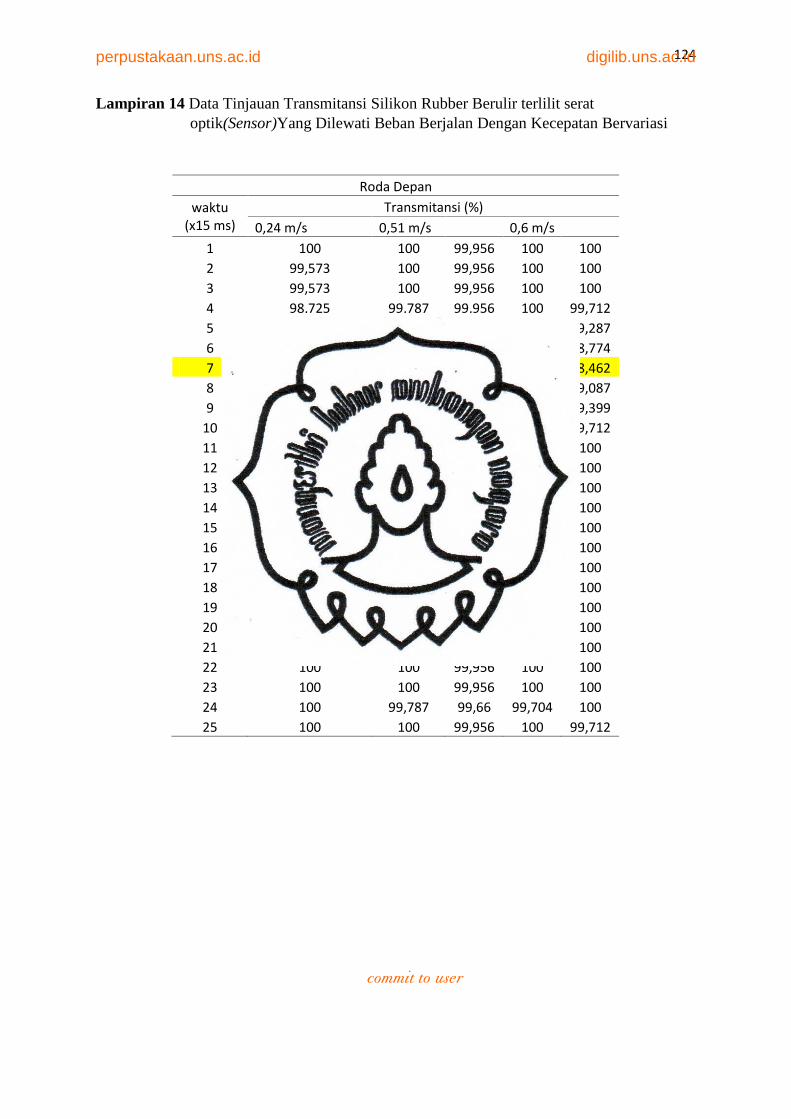
124
Lampiran 14 Data Tinjauan Transmitansi Silikon Rubber Berulir terlilit seratoptik(Sensor)Yang Dilewati Beban Berjalan Dengan Kecepatan Bervariasi
Roda Depanwaktu
(x15 ms)Transmitansi (%)
0,24 m/s 0,51 m/s 0,6 m/s1 100 100 99,956 100 1002 99,573 100 99,956 100 1003 99,573 100 99,956 100 1004 98,725 99,787 99,956 100 99,7125 98,159 99,139 99,269 100 99,2876 97,247 97,843 98,773 98,804 98,7747 96,276 96,547 98,46 98,495 98,4628 97,276 97,843 98,66 98,797 99,0879 98,442 98,491 99,365 99,402 99,399
10 99,007 99,139 99,66 99,704 99,71211 99,573 99,463 99,956 100 10012 99,856 99,463 99,956 100 10013 100 99,787 99,956 100 10014 100 99,787 99,956 100 10015 99,856 100 99,956 100 10016 100 99,787 99,956 100 10017 100 100 99,956 100 10018 100 100 99,956 100 10019 99,856 100 99,956 100 10020 100 99,787 99,956 100 10021 100 100 99,956 100 10022 100 100 99,956 100 10023 100 100 99,956 100 10024 100 99,787 99,66 99,704 10025 100 100 99,956 100 99,712
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
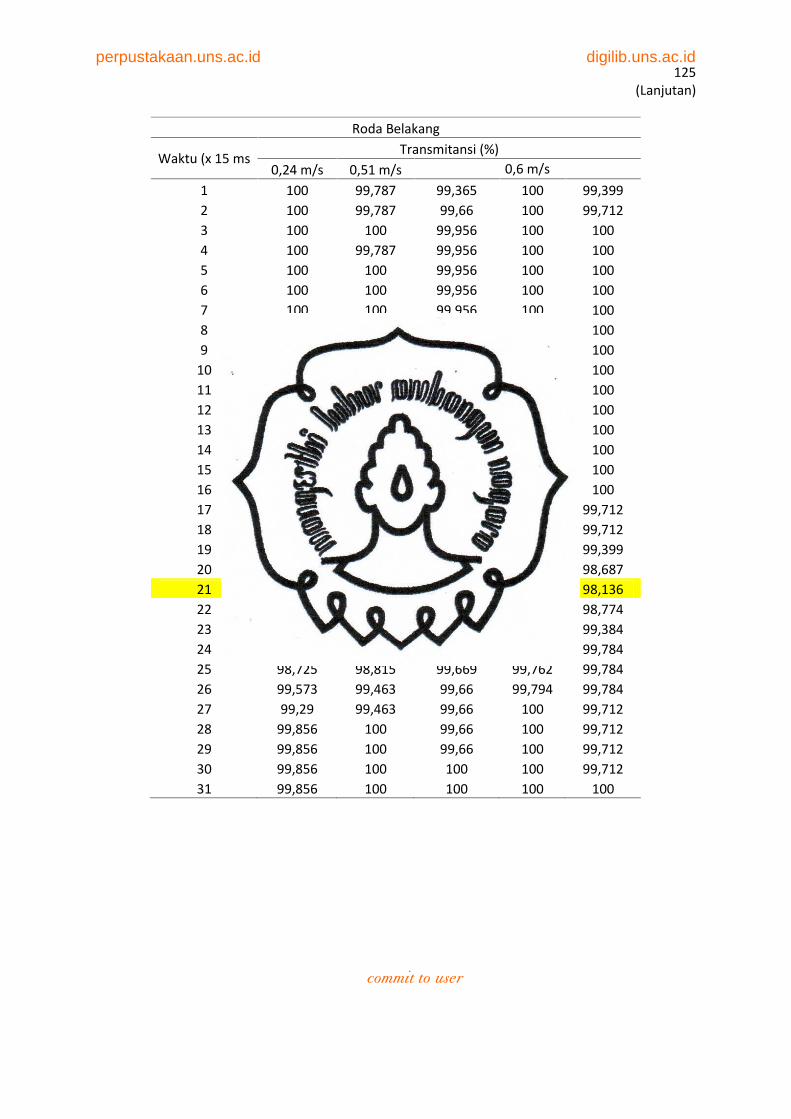
125(Lanjutan)
Roda Belakang
Waktu (x 15 ms Transmitansi (%)0,24 m/s 0,51 m/s 0,6 m/s
1 100 99,787 99,365 100 99,3992 100 99,787 99,66 100 99,7123 100 100 99,956 100 1004 100 99,787 99,956 100 1005 100 100 99,956 100 1006 100 100 99,956 100 1007 100 100 99,956 100 1008 100 99,787 99,956 100 1009 100 100 99,956 100 100
10 100 100 99,956 100 10011 100 100 99,956 100 10012 99,856 99,787 99,956 100 10013 100 100 99,956 100 10014 100 100 99,956 99,704 10015 99,856 100 99,956 100 10016 99,573 100 99,66 100 10017 99,856 100 99,956 99,704 99,71218 97,573 100 99,956 99,704 99,71219 96,442 99,139 99,66 99,099 99,39920 94,993 96,547 98,773 98,495 98,68721 94,462 94,603 98,182 98,193 98,13622 95,744 96,871 98,477 98,797 98,77423 96,744 97,843 98,973 99,402 99,38424 97,593 98,491 99,469 99,702 99,78425 98,725 98,815 99,669 99,762 99,78426 99,573 99,463 99,66 99,794 99,78427 99,29 99,463 99,66 100 99,71228 99,856 100 99,66 100 99,71229 99,856 100 99,66 100 99,71230 99,856 100 100 100 99,71231 99,856 100 100 100 100
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
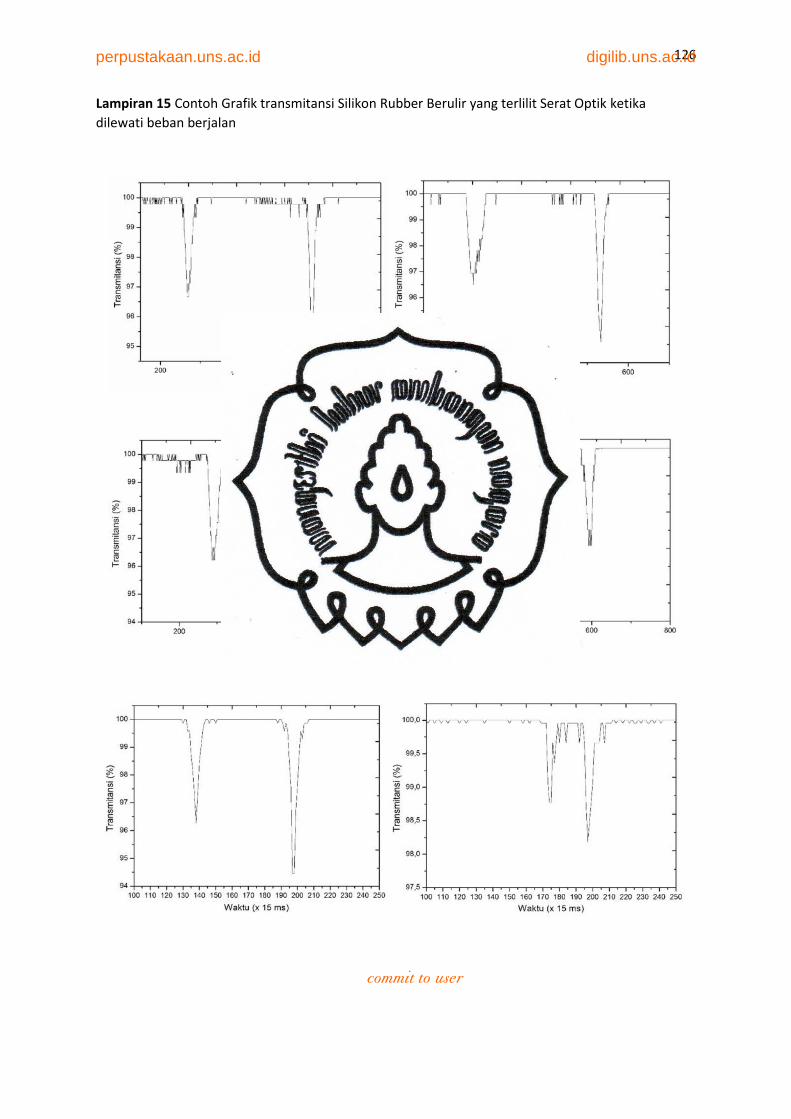
126
Lampiran 15 Contoh Grafik transmitansi Silikon Rubber Berulir yang terlilit Serat Optik ketikadilewati beban berjalan
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user
127
Lampiran 16 List Program Arduino
List program arduino untuk interface fiber sensor dapat dilihat dibawah ini
void setup()
{
Serial.begin(9600);
analogReference(INTERNAL);
}
void loop()
{
int ldr1=analogRead(1);
Serial.println((ldr1));
int ldr2=analogRead(5);
Serial.println((ldr2));
delay(14);
//delayMicroseconds(265);
}
Sedangkan list program arduino untuk photogate sensor adalah sebagai berikut
void setup()
{
// put your setup code here, to run once:
Serial.begin(115200);
}
void loop() {
// put your main code here, to run repeatedly:
int ldr1=analogRead(0);
//Serial.write(highByte(ldr1));
//Serial.write(lowByte(ldr1));
Serial.println((ldr1));
int ldr2=analogRead(1);
Serial.println((ldr2));
delay(10);
//delayMicroseconds(150);
}
perpustakaan.uns.ac.id digilib.uns.ac.id
commit to user